
Unsupervised Annotation and Detection of Novel Objects Using Known
Objectness
Harsh Singh Jadon
∗
, Jagdish Deshmukh
∗
, Kamakshya Prasad Nayak
a
,
Kamalakar Vijay Thakare
b
and Debi Prosad Dogra
† c
Indian Institute of Technology Bhubaneswar, Odisha, PIN 752050, India
Keywords:
Novel Object Detection, Unsupervised Learning, Weakly Annotated Dataset, Clustering.
Abstract:
The paper proposes a new approach to detecting and annotating novel objects in images that are not precisely
part of a training dataset. The ability to detect novel objects is essential in computer vision, enabling machines
to recognise objects that have not been seen before. Current models often fail to detect novel objects as they
rely on predefined categories in the training data. Our approach overcomes this limitation by leveraging a large
and diverse dataset of objects obtained through web scraping. We extract features using a backbone network
and perform clustering to remove redundant data. The resulting dataset is used to retrain the object detection
models to obtain results. The method provides deep insights into the effect of clustering and data redundancy
removal on performance. Overall, the work contributes to the field of object detection by providing a new
approach for detecting novel objects. The method has the potential to be applied to a variety of real-world CV
applications.
1 INTRODUCTION
Region proposals are vital building blocks in object
detection tasks. An improved pre-processing of pro-
posals usually leads to significant improvements in
various applications, such as object recognition (Li
et al., 2022b; Li et al., 2022a; Yang et al., 2022;
Cheng et al., 2022; Hou et al., 2022), video track-
ing (Qin et al., 2022; Tang and Ling, 2022; Blatter
et al., 2023), object discovery (H
´
enaff et al., 2022;
Wang et al., 2022; Bao et al., 2022) and segmenta-
tion (Park et al., 2022; Xu et al., 2022). Due to such
advancement, object detection using region proposals
has attracted tremendous attention. Such tasks aim to
generate region proposals and predict the labels with
acceptable threshold. However, one major limitation
of current object detection models is their inability to
detect novel objects that are not present in the training
data. This limitation hinders the ability of the models
to recognize unknown objects, which may be a criti-
cal requirement for various real-world applications.
a
https://orcid.org/0000-0002-0356-8377
b
https://orcid.org/0000-0003-4587-4126
c
https://orcid.org/0000-0002-3904-732X
∗
These authors contributed equally to this work
†
Corresponding author
Several attempts (LaBonte et al., 2023; Xu et al.,
2020; Wu et al., 2021; Zhu et al., 2021; Fan et al.,
2020) have been made in recent years to detect novel
objects. Kuo et al. (Kuo et al., 2015) have developed
DeepBox that generates bottom-up proposals and re-
ranks them using CNNs, given any RGB image. Kang
et al. (Kang et al., 2019) have designed a novel few-
shot detection model that 1) learns generalized meta-
features and 2) automatically re-weights the features
for novel class detection by producing class-specific
activating coefficients from a few support samples.
However, unlike the learning-free counterparts (Bao
et al., 2022; H
´
enaff et al., 2022; Kuo et al., 2015),
these methods tend to over-fit annotated categories
and struggle with novel objects.
To overcome this limitation, this paper proposes a
new approach to detect novel objects in images that
are not precisely part of a training dataset. Our ap-
proach leverages a large and diverse dataset of objects
obtained through web scraping. It enables the detec-
tion of novel objects with higher accuracy as com-
pared to recent methods. We extract features using
well-known backbone networks and perform cluster-
ing to remove redundant data. The resulting dataset is
then used to retrain the object detection model to ob-
tain final results. Existing models rely on predefined
categories and context-free learning in the training
694
Jadon, H., Deshmukh, J., Nayak, K., Thakare, K. and Dograψ, D.
Unsupervised Annotation and Detection of Novel Objects Using Known Objectness.
DOI: 10.5220/0012412400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
694-701
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

data and they often fail to detect novel objects. Our
approach has been evaluated on several benchmarks,
demonstrating its effectiveness in detecting novel ob-
jects with high accuracy. Moreover, we provide in-
sights into the effect of clustering and data redun-
dancy removal on the performance of the proposed
approach. The paper offers the following technical
contributions:
• We propose a systematic, easy-to-follow approach
to accumulate relevant data samples for novel ob-
ject discovery. With sufficient related keywords,
the proposed approach can generate a large pool
of auto-annotated images that can be used for
training object detectors.
• We comprehensively evaluate pre-trained object
detection models on a newly generated dataset.
This evaluation encompasses various aspects such
as threshold tuning, accuracy on novel classes,
and the effect of the number of images on the
model’s accuracy.
The rest of the paper is organized as follows. Sec-
tion 2 provides a review of related work in the field of
object detection and detection of novel objects. Sec-
tion 3 describes the proposed approach in detail, in-
cluding data collection, feature extraction, clustering,
and retraining. Section 4 presents the experimental
setup and results. Section 5 discusses the proposed
approach’s results and limitations. Finally, Section 6
concludes the paper and discusses future work.
2 RELATED WORK
2.1 Object Detection
Traditionally, object detection algorithms relied heav-
ily on handcrafted features. However, the advent
of RCNNs, proposed by Girshick et al. (Girshick,
2015) has significantly boosted the progress of ob-
ject detection. Subsequently, Faster-RCNNs and Fast-
RCNNs have been introduced, which have improved
the RCNN models by jointly training a detector and a
bounding box regressor within the same network con-
figuration. Based on Faster RCNNs (Ren et al., 2015),
the authors have proposed Feature Pyramid Networks
(FPN). The FPN architecture uses a top-down ap-
proach with lateral connections to generate high-level
semantics at all scales. FPN has exhibited significant
progress in detecting objects at varying scales. An-
other improvement in object detection is Mask RCNN
proposed by He et al. (He et al., 2017), which incorpo-
rates pixel-level masks into Faster-RCNN. However,
majority of the object detection algorithms demand
fully annotated data for an object class they aim to
detect. With the remarkable progress in object detec-
tion, the focus of recent object proposal research has
transitioned from object discovery to detection. Ob-
ject discovery proposals aim to propose all objects in
an image, whereas detection proposals are designed to
propose only the labelled categories for downstream
classification.
2.2 Class Agnostic Object Detection
Class-agnostic object detection is a subfield of com-
puter vision that aims to detect objects without rely-
ing on pre-defined classes. It focuses on detecting and
localizing objects in an image regardless of their cat-
egory. Class-agnostic object detection has numerous
applications, including object tracking, scene under-
standing, and robotics. Recent advancements in deep
learning models, such as one-stage detectors has sig-
nificantly improved the accuracy and speed of class-
agnostic object detection. However, this field still has
several challenges, including object occlusion, scale
variations, and background clutter. Previously, class-
agnostic object detection has been tackled using tra-
ditional methods like Selective Search (Uijlings et al.,
2013), EdgeBox (Zitnick and Dollar, 2014), Deep-
Mask (O. Pinheiro et al., 2015), and MCG (Pont-
Tuset et al., 2017). However, recent advancements
such as the Object Localisation Network (Kim et al.,
2021) and Multiscale Attention Vision Transformer
with Late Fusion (Maaz et al., 2022) have emerged
in this field. While existing approaches have made
significant advancements, they still have some limita-
tions that need to be addressed such as:
Limited Generalization to Novel Objects. Pre-
trained object detection models often struggle to gen-
eralize well to novel objects not present in their train-
ing dataset. When faced with unseen object cate-
gories, these models may exhibit reduced accuracy
and reliability, hindering their performance in real-
world scenarios where object variability is high.
Dependency on Annotated Training Data. Most
state-of-the-art object detection models rely heavily
on large-scale annotated training data. The manual
annotation process is time-consuming, expensive, and
subject to human error, limiting the scalability and ac-
cessibility of these approaches.
3 METHOD
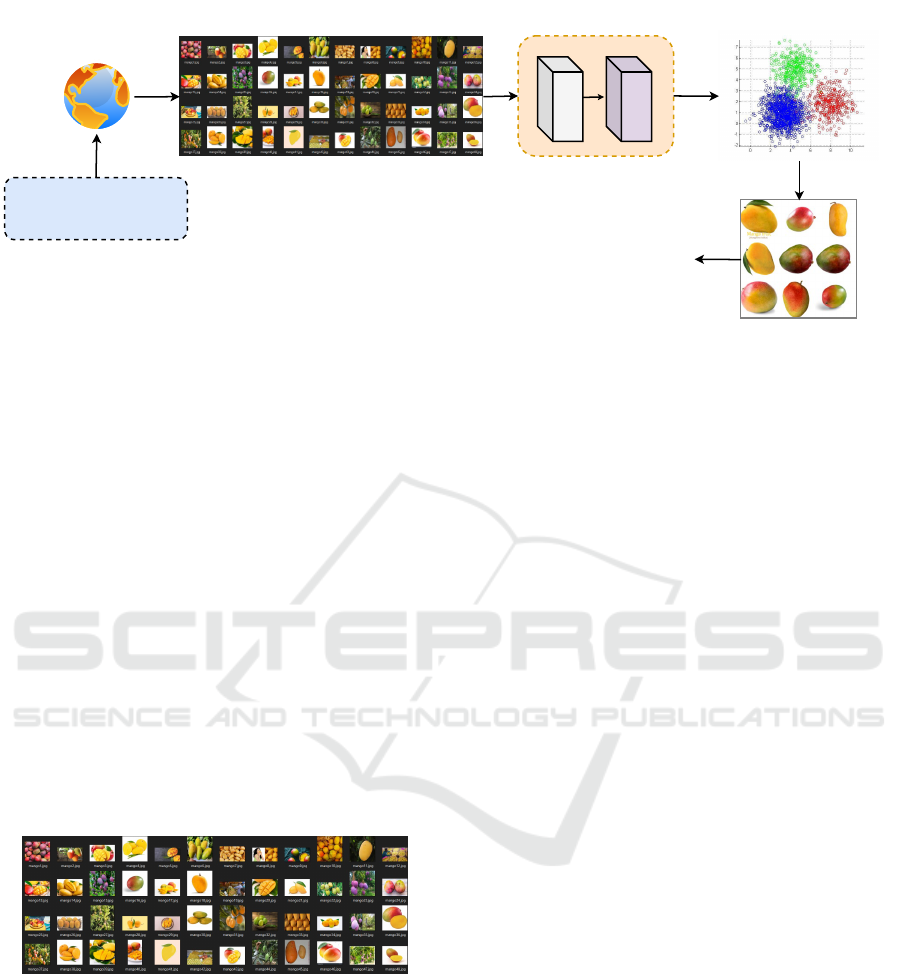
The pipeline of the proposed approach is summarized
in Fig. 1. It consists of three stages: Accumulating
novel object dataset using an image search engine,
Unsupervised Annotation and Detection of Novel Objects Using Known Objectness
695
Keywords Pool
Seach Engine
Pseudo Objects Dataset
RP-FE Block
Clustering
RP
FE
Weakly Annotated Data
Custom Training
Figure 1: The architecture of the proposed framework. It has three important stages: (i) Extraction of relevant object dataset
using Web Scrapper tool leveraging a large set of keyword pools. (ii) RP-FE block: Extract region proposals using class-
agnostic object detectors and feed them to the backbone network for feature extraction. (iii) Utilize clustering to remove
redundant image samples and use the newly generated dataset to custom training of the existing object detection model.
RP-FE block, and refinement of most relevant data
using clustering followed by custom training of detec-
tion model with new data. In the following sections,
we have explained each stage in detail.
3.1 Dataset Generation
The critical component of a typical object detec-
tion method is obtaining the labelled training data
that contains examples of well-known object classes.
However, there is an absence of labelled data accessi-
ble for training regarding new things. It is challenging
to build supervised learning techniques for identify-
ing new objects due to the scarcity of data. Moreover,
generating labelled data is a tedious task.
Figure 2: A depiction of a few image samples retrieved us-
ing the Web Scraping. The keywords are, mango, ripped
mango, mango with white background, and so on.
To mitigate the aforementioned problem, we have
employed a Web Scraper. This tool directly searches
the World Wide Web based on a search keyword us-
ing the Hypertext Transfer Protocol and extracts im-
age files from embedded HTML of the web page. We
have employed a fully automated tool that retrieves
non-copyright images from websites based on a par-
ticular keyword. Thus, we can obtain novel objects
data as it is directly retrieved from the internet with-
out supervision. Fig. 2 depicts a collection of image
samples for the object mango.
Let the set of n keywords (similar) for an un-
known or novel object be given in (1). For exam-
ple, if K is the set of keywords related to mango,
then k
1
= ripped mango, k
2
= green mango, k
3
=
mango with knife, etc. We have employed various
keywords for individual objects based on natural ob-
servations, brainstorming sessions, and suggestions
from search engines. For instance, mango with leaf,
tennis ball with racket, etc., have been used to search
images on web.
K = {k
1
, k
2
, ..., k
n
} (1)
We also assume C = {C
1
, C
2
, ..., C
n
} be the set of ob-
ject images retrieved from the web using the keyword
set K. The dataset C is an extensive collection of non-
copyrighted images related to that particular object.
The images of the dataset are then processed through
an existing object detection model as discussed in the
next section.
3.2 RP-FE Block
The approach uses a class-agnostic object detection
model to detect all potential objects present in all the
images of the dataset. By employing a class-agnostic
model, we are able to capture a wide range of ob-
jects without being limited to a predefined class of
object. The detection process generates region-of-
interest proposals (RP) that encompass the spatial lo-
cations of these objects. Subsequently, we extract dis-
criminative features (FE) from these object proposals,
enabling us to capture meaningful information spe-
cific to each object.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
696

Region Pooling (RP) Extraction. Let M be the
class-agnostic object detection model with pre-trained
weights W
M
as given in (2), where p
M
represents the
parameters.
M = (W
M
, p
M
) (2)
Also, we assume that F = (W
F
, p
F
) is a back-
bone network that extracts features from the given
image. We first employ a class-agnostic object de-
tector M and obtain the set of bounding boxes B =
{B
1
, B
2
, . . . , B
n
}, where B
i
is the set of coordinates of
objects present in C
i
. Since C is a collection of novel
object images, we need a refinement strategy to filter
the most relevant data that accurately represent K. To
accomplish this, we have employed well-known clus-
tering techniques and obtained the curated data.
Feature Extraction (FE). First, we extract features
by employing a set of backbone networks, F =
{F
1
, F
2
, F
3
}. This extraction is shown in (3), where
D
1
features are extracted from the image set C
1
using
i −th network with pre-trained weights W
F
.
D
1
= F
i
(B
1
, W
Fi
) (3)
Here, F
1
, F
2
and F
3
are popular ResNet-50, Incep-
tionV3, and EfficientNet. In the later stage, D =
{D
1
, D
2
, . . . , D
n
} is the set of extracted features fed
to the clustering algorithm. The clustering step is
important in eliminating redundant data and organiz-
ing the extracted features into distinct groups or clus-
ters. This process helps us to identify and retain the
novel object’s most relevant and representative data
samples. Since the unlabelled images are obtained
through keyword searching, clustering enables us to
group similar features, thereby facilitating the selec-
tion of the most meaningful and discriminative rep-
resentations for further analysis. To capture the most
discriminative features with minimal intra-class vari-
ations, we have selected the smallest cluster for ex-
perimentation.
3.3 Custom Training
Once we obtain the most relevant data through clus-
tering, we create a new weakly labelled dataset. The
dataset is the foundation for the custom training of an
existing object detection model. The objective is to
fine-tune an existing trained model using the weakly
generated dataset, focusing on the targeted class of
objects. During the class-agnostic detection and ROI
pooling stages, we not only detect objects but also
preserve their spatial locations within the image. This
spatial information is important for accurate annota-
tion preparation and training. By maintaining the spa-
tial context of each object, we ensure that the model
learns to recognize and localize the targeted class ef-
fectively.
Training. The annotation process involves labelling
the weakly generated dataset and providing class-
specific annotations for the targeted objects. These
annotations serve as ground truth labels for training
the pre-trained object detection model and refining its
ability to detect and classify the desired class of ob-
jects accurately. To learn the parameters of the model,
we have incorporated IoU loss (L
IoU
), which is given
in (4), where G
T
is a set of four coordinates as ground
truth labels of the objects and P is set of coordinates
predicted by the model.
L
IoU
= −ln
(G
T
∩ P)
(G
T
∪ P)
(4)
This IoU loss helps the model to learn intrinsic fea-
tures resulting better localization results.
Evaluation. We have comprehensively evaluated the
pre-trained object detection models using a newly
available dataset. As the newly acquired dataset is
utilized for training purposes, we have derived the
test set from this newly constructed data. To assess
the performance of the models, we have designed and
conducted four distinct experiments. Firstly, we have
performed threshold tuning, systematically varying
the threshold values to investigate their impact on the
models’ detection accuracy. Secondly, we have eval-
uated the models’ accuracy on novel classes, which
are not included in the original training set. This has
allowed us to measure the ability to generalize to un-
seen object categories. Thirdly, after fine-tuning, we
have quantified the accuracy improvement achieved
by the pre-trained models on these novel classes. This
analysis has provided us insights into the transferabil-
ity of the learned representations. Finally, we have
explored the effect of varying the number of train-
ing images on the models’ performance, investigating
how the scale of the dataset influenced their detection
capabilities.
4 EXPERIMENTS AND RESULTS
In this section, we present experimental results for the
following four categories: (i) Threshold tuning, (ii)
accuracy on novel classes, iii) Accuracy on existing
classes, and iv) effect of number of training samples.
4.1 Implementation Details
We have utilised two class agnostic objection
detection models: OLN (Kim et al., 2021) and
MAVL (Maaz et al., 2022). OLN (Kim et al.,
Unsupervised Annotation and Detection of Novel Objects Using Known Objectness
697
2021) is a two-stage object proposer similar to Faster
R-CNN (Ren et al., 2015). It consists of a fully convo-
lutional FCN and a region-based ROI stage followed
by locality predictions. Meanwhile, MAVL (Maaz
et al., 2022) has been trained on LMDet (Peng et al.,
2020), a large-scale object detection dataset with
478,000 images and 10.5 millions of object instances.
For the feature extraction phase of the pipeline, we
have considered three feature extraction models:
ResNet50, InceptionV3 and EfficientNetB0. These
models have been selected due to their excellent
performance on image classification. We have used
the implementations available with ScikitLearn’s for
KMeans and DBSCAN clustering approaches. In
addition, we have trained and evaluated YOLOv7,
currently the best model in the YOLO family.
Evaluation Metrics. We have used recall (R), preci-
sion (P), and mAP (mean Average Precision) metrics
for evaluation. Recall measures the ability to identify
all relevant instances. Precision evaluates the accu-
racy of the detected instances. And mAP assesses the
overall detection performance by considering the av-
erage precision across all classes or categories. These
metrics help evaluate the model’s performance, offer-
ing insights into its object detection capabilities and
accuracy.
4.2 Threshold Tuning
Threshold tuning is very important in object detec-
tion as it allows for adjusting the detection sensitiv-
ity. By selecting an appropriate threshold, the trade-
off between false positives and false negatives can
be controlled, thereby influencing the overall preci-
sion and recall of the system. Optimal threshold tun-
ing ensures that the model balances accurately, de-
tecting objects and minimizing erroneous detections,
leading to improved performance and more reliable
results. We have conducted several experiments us-
ing different thresholds on OLN (Kim et al., 2021)
and MAVL (Maaz et al., 2022) models. Tab. 1 repre-
sents the values of different accuracy metrics on vary-
ing threshold values.
4.3 Experiments on Pre-Trained Classes
Even though the COCO dataset includes the sports
ball class and YOLOv7 has been trained on it, the
model often identifies the tennis balls as instances of
oranges instead, resulting in a reduced precision for
the testing partition. The prediction for the tennis ball
has been shown in Fig. 5. We have utilized the OLN,
ResNet50, and K-means clustering with the search
Table 1: Accuracy metric values at various thresholds for
the OLN (Kim et al., 2021) and MAVL (Maaz et al., 2022)
model.
Threshold Tuning
Stage-I Accuracy Metrics
Model Threshold P R mAP@.5 mAP@.5:.95
OLN 0.5 0.819 0.964 0.793 0.664
OLN 0.6 0.906 0.96 0.902 0.74
OLN 0.66 0.96 0.96 0.941 0.78
OLN 0.7 0.96 0.938 0.937 0.755
OLN 0.75 0.963 0.88 0.921 0.728
MAVL 0.7 0.41 0.81 0.55 0.389
MAVL 0.75 0.44 0.809 0.6 0.44
MAVL 0.8 0.49 0.806 0.613 0.471
MAVL 0.85 0.49 0.756 0.606 0.436
MAVL 0.9 0.49 0.72 0.577 0.38
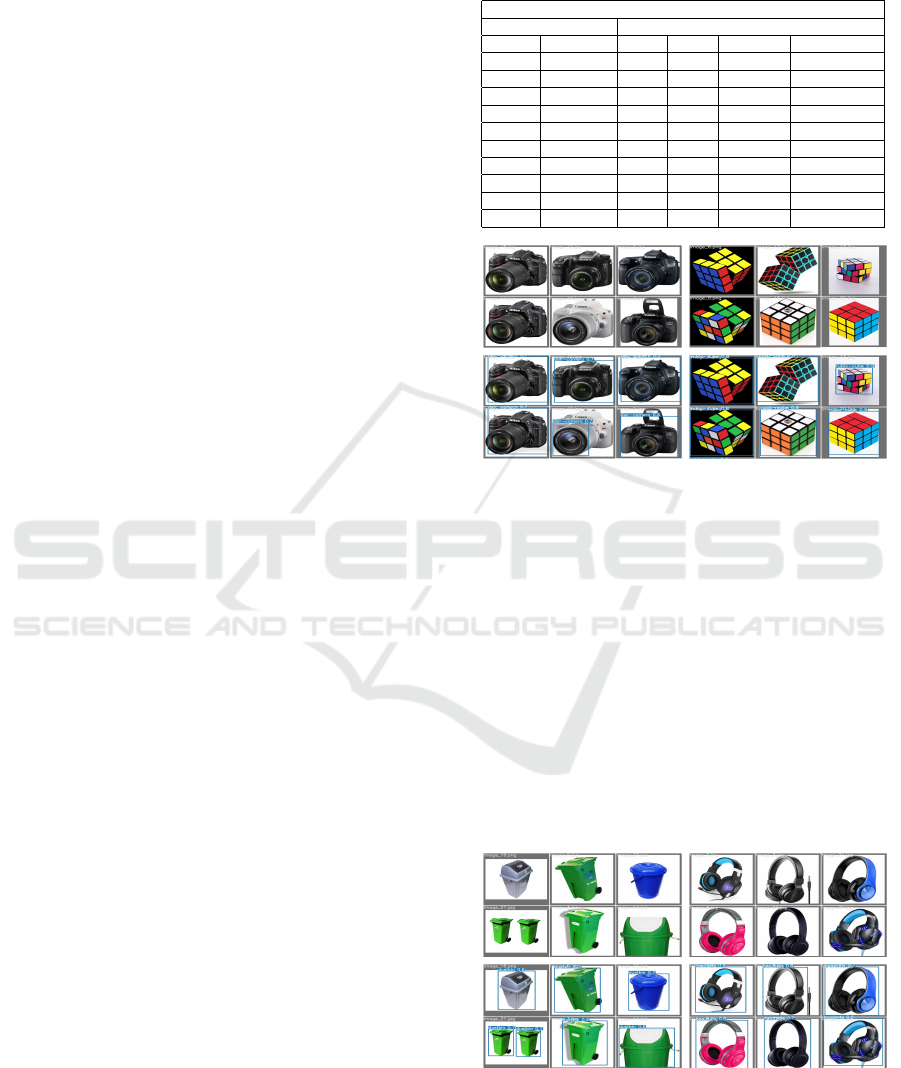
Figure 3: Object detection results using YOLOv7 on novel
category DSLR camera and Rubic cube. The top row is the
YOLOv7 prediction before the custom training and the bot-
tom row presents the prediction of the retrained model with
the proposed approach.
query “tennis ball” to create a tennis ball dataset with
the instances of tennis balls labelled as sports balls.
We created two partitions, one for training and the
other for testing. Tab 2 and 3 present the prediction
results related to improvement in accuracy when the
model is retrained with the proposed approach. As we
can see, the accuracy gain is higher for sports ball as
the number of samples for the tennis ball is low in the
COCO dataset and often gets predicted as orange. Af-
ter retraining the model with a new dataset, the model
successfully detected tennis balls. However, it is not
Figure 4: Object detection results using YOLOv7 on two
novel categories e.g. dustbin and Headphones. The top row
is the YOLOv7 prediction before custom training and the
bottom is the prediction of the retrained model with the pro-
posed approach.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
698
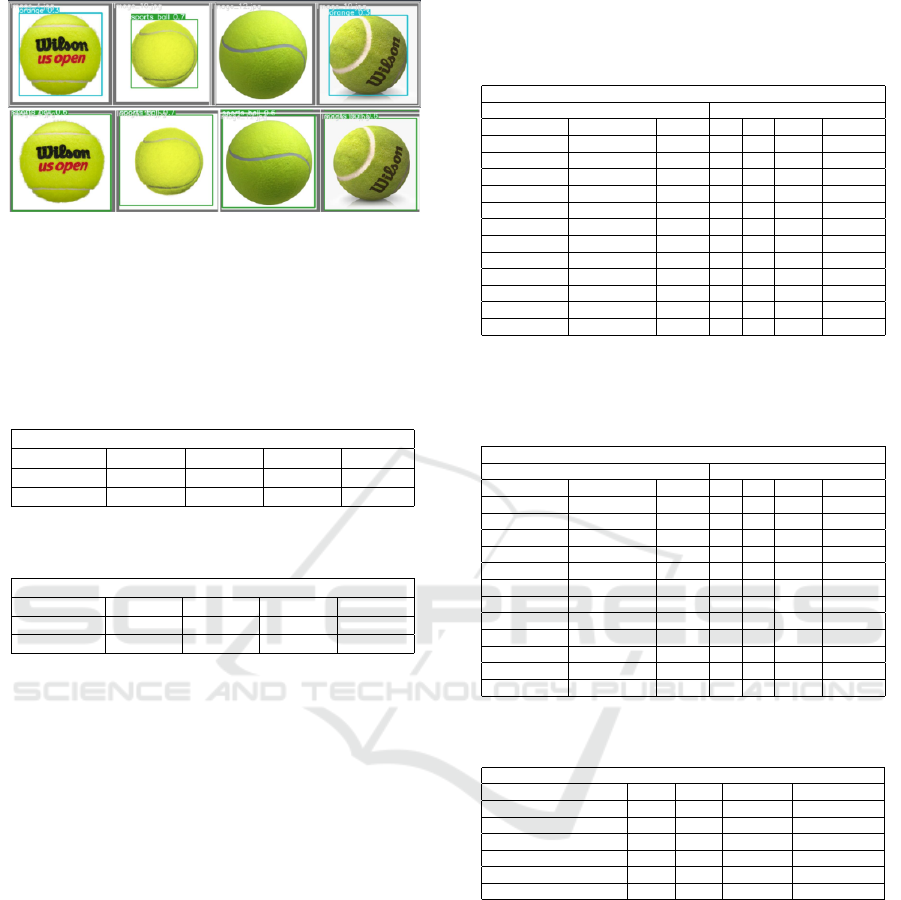
Figure 5: Top row: tennis ball is part of the COCO dataset,
but YOLOv7 predicts its label incorrectly. Bottom row:
Prediction results after retraining the new dataset generated
by the proposed pipeline.
the same with suitcase as it is often correctly classi-
fied.
Table 2: Improvement in accuracy metrics after additional
training on the “sports ball” class.
Sports Ball
Accuracy Metrics P R mAP@.5 mAP@.5:.95
Before Training 0.669 0.806 0.705 0.655
After Training 0.923 (+0.254) 0.854 (+0.048) 0.902 (+0.197) 0.775 (+0.12)
Table 3: Improvement in accuracy metrics after extra train-
ing on the “suitcase” class.
Suitcase
Accuracy Metrics P R mAP@.5 mAP@.5:.95
Before Training 0.917 0.834 0.902 0.724
After Training 0.941 (+0.024) 0.857 (+0.023) 0.919 (+0.017) 0.739 (+0.015)
4.4 Accuracy on Novel Classes
Evaluating the accuracy of the pre-trained object de-
tection models on novel classes is essential to assess
their generalization capabilities. We have trained and
evaluated YOLOv7 with the following classes: Ru-
bic cube, dustbin, headset headphones, DSLR cam-
era, and tennis ball categories. We have reported the
accuracy of YOLOv7 with different metrics on the
Rubic cube in Table 4 and DSLR Camera in Table 5.
Few resulting predictions are shown in Fig. 3 and 4.
4.5 Results Using Varying Number of
Images
As we are scraping images from web without using
any paid APIs, we can fetch a maximum of 400-500
images on a single run. This number can further vary
based on the quality of the internet connection and the
server load. Hence we decided to observe the effect
of the number of fetched images on the Novel Class
Training accuracy. The results presented in Tab. 6
show that higher mAP can be achieved with more
number of samples.
Table 4: Accuracy metrics of YOLOv7 when trained on the
dataset produced by the proposed pipeline using the search
term “Rubix Cube”, considering all possible combinations
of the pipeline’s three stages.
Search Query: Rubix Cube
Task Accuracy Metrics
Class Agnostic OD Feature Extraction Clustering P R mAP@.5 mAP@.5:.95
OLN ResNet50 K-Means 0.96 0.96 0.941 0.78
OLN InceptionV3 K-Means 0.842 0.95 0.869 0.74
OLN EfficientNet K-Means 0.889 0.96 0.922 0.788
MAVL ResNet50 K-Means 0.45 0.731 0.512 0.39
MAVL InceptionV3 K-Means 0.47 0.721 0.517 0.4
MAVL EfficientNet K-Means 0.49 0.806 0.613 0.471
OLN ResNet50 DBSCAN 0.72 0.69 0.702 0.541
OLN InceptionV3 DBSCAN 0.641 0.604 0.647 0.48
OLN EfficientNet DBSCAN 0.556 0.62 0.57 0.39
MAVL ResNet50 DBSCAN 0.69 0.68 0.67 0.5
MAVL InceptionV3 DBSCAN 0.56 0.54 0.547 0.372
MAVL EfficientNet DBSCAN 0.492 0.523 0.48 0.31
Table 5: Accuracy metrics of YOLOv7 when trained on the
dataset produced by the proposed pipeline using the search
term “DSLR Camera”, considering all possible combina-
tions of the pipeline’s three stages.
Search Query: DSLR Camera
Task Accuracy Metrics
Class Agnostic OD Feature Extraction Clustering P R mAP@.5 mAP@.5:.95
OLN ResNet50 K-Means 0.958 0.958 0.985 0.826
OLN InceptionV3 K-Means 0.833 0.95 0.86 0.737
OLN EfficientNet K-Means 0.88 0.955 0.917 0.779
MAVL ResNet50 K-Means 0.552 0.709 0.518 0.464
MAVL InceptionV3 K-Means 0.556 0.711 0.518 0.498
MAVL EfficientNet K-Means 0.589 0.83 0.54 0.523
OLN ResNet50 DBSCAN 0.57 0.713 0.532 0.499
OLN InceptionV3 DBSCAN 0.548 0.719 0.51 0.49
OLN EfficientNet DBSCAN 0.536 0.808 0.504 0.482
MAVL ResNet50 DBSCAN 0.432 0.607 0.41 0.343
MAVL InceptionV3 DBSCAN 0.433 0.619 0.403 0.33
MAVL EfficientNet DBSCAN 0.459 0.64 0.429 0.37
Table 6: Effect of nnumber of scraped images on accuracy
metrics after training.
Effect of no. of scraped images
No of images\Metrics P R mAP@.5 mAP@.5:.95
50 0.378 0.4 0.371 0.2
100 0.457 0.44 0.487 0.338
200 0.579 0.48 0.553 0.378
300 0.823 0.56 0.706 0.544
400 0.923 0.949 0.929 0.72
500 0.96 0.96 0.941 0.78
5 CONCLUSIONS
In conclusion, the research paper presents a compre-
hensive approach of unsupervised novel object detec-
tion. We have detected a few potential objects in the
image using a class-agnostic object detection model
and obtained ROI proposals. Extracting features from
these proposals has facilitated the representation of
each object in a discriminative manner. Through clus-
tering, we have reduced redundancy and obtained a
refined dataset generated from data obtained via key-
word searching on the web. Custom training has been
performed using the weakly generated dataset to en-
Unsupervised Annotation and Detection of Novel Objects Using Known Objectness
699

hance the object detection model further. Spatial in-
formation of the objects has been preserved during the
-agnostic detection and ROI pooling stages, ensuring
accurate annotation preparation. The model has been
fine-tuned on weakly generated datasets, focusing on
the targeted class, resulting in improved object detec-
tion capabilities.
Evaluation of the custom-trained model has
demonstrated its effectiveness in detecting and local-
izing the targeted class of objects. The integration
of clustering, weakly generated data, spatial preser-
vation, and custom training has contributed to the
overall success of the proposed approach. This re-
search provides new insights into unsupervised novel
object detection, addressing the challenges of limited
labelled data for novel objects. The methodology pre-
sented in this paper offers a practical framework for
detecting and localizing novel objects in various do-
mains, paving the way for advancements in computer
vision and object detection research. Future work can
focus on extending this approach to real-time applica-
tions and exploring additional techniques to enhance
the accuracy and efficiency of unsupervised novel ob-
ject detection systems.
REFERENCES
Bao, Z., Tokmakov, P., Jabri, A., Wang, Y.-X., Gaidon, A.,
and Hebert, M. (2022). Discovering objects that can
move. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
11789–11798.
Blatter, P., Kanakis, M., Danelljan, M., and Van Gool,
L. (2023). Efficient visual tracking with exemplar
transformers. In Proceedings of the IEEE/CVF Win-
ter Conference on Applications of Computer Vision,
pages 1571–1581.
Cheng, G., Wang, J., Li, K., Xie, X., Lang, C., Yao, Y., and
Han, J. (2022). Anchor-free oriented proposal gener-
ator for object detection. IEEE Transactions on Geo-
science and Remote Sensing, 60:1–11.
Fan, Q., Zhuo, W., Tang, C.-K., and Tai, Y.-W. (2020). Few-
shot object detection with attention-rpn and multi-
relation detector. In Proceedings of the IEEE/CVF
conference on computer vision and pattern recogni-
tion, pages 4013–4022.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
H
´
enaff, O. J., Koppula, S., Shelhamer, E., Zoran, D.,
Jaegle, A., Zisserman, A., Carreira, J., and Arand-
jelovi
´
c, R. (2022). Object discovery and representa-
tion networks. In Computer Vision–ECCV 2022: 17th
European Conference, Tel Aviv, Israel, October 23–
27, 2022, Proceedings, Part XXVII, pages 123–143.
Springer.
Hou, L., Lu, K., Xue, J., and Li, Y. (2022). Shape-adaptive
selection and measurement for oriented object detec-
tion. In Proceedings of the AAAI Conference on Arti-
ficial Intelligence, volume 36, pages 923–932.
Kang, B., Liu, Z., Wang, X., Yu, F., Feng, J., and Dar-
rell, T. (2019). Few-shot object detection via feature
reweighting.
Kim, D., Lin, T., Angelova, A., Kweon, I. S., and Kuo, W.
(2021). Learning open-world object proposals without
learning to classify. CoRR, abs/2108.06753.
Kuo, W., Hariharan, B., and Malik, J. (2015). Deepbox:
Learning objectness with convolutional networks.
LaBonte, T., Song, Y., Wang, X., Vineet, V., and Joshi, N.
(2023). Scaling novel object detection with weakly
supervised detection transformers. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 85–96.
Li, W., Chen, Y., Hu, K., and Zhu, J. (2022a). Oriented
reppoints for aerial object detection. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 1829–1838.
Li, Y., Mao, H., Girshick, R., and He, K. (2022b). Ex-
ploring plain vision transformer backbones for object
detection. In Computer Vision–ECCV 2022: 17th Eu-
ropean Conference, Tel Aviv, Israel, October 23–27,
2022, Proceedings, Part IX, pages 280–296. Springer.
Maaz, M., Rasheed, H., Khan, S., Khan, F. S., Anwer,
R. M., and Yang, M.-H. (2022). Class-agnostic ob-
ject detection with multi-modal transformer. In 17th
European Conference on Computer Vision (ECCV).
Springer.
O. Pinheiro, P. O., Collobert, R., and Dollar, P. (2015).
Learning to segment object candidates. In Cortes, C.,
Lawrence, N., Lee, D., Sugiyama, M., and Garnett,
R., editors, Advances in Neural Information Process-
ing Systems, volume 28. Curran Associates, Inc.
Park, K., Woo, S., Oh, S. W., Kweon, I. S., and Lee, J.-Y.
(2022). Per-clip video object segmentation. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 1352–1361.
Peng, J., Bu, X., Sun, M., Zhang, Z., Tan, T., and Yan, J.
(2020). Large-scale object detection in the wild from
imbalanced multi-labels. CoRR, abs/2005.08455.
Pont-Tuset, J., Arbelaez, P., T.Barron, J., Marques, F., and
Malik, J. (2017). Multiscale combinatorial grouping
for image segmentation and object proposal genera-
tion. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 39(1):128–140.
Qin, H., Yu, C., Gao, C., and Sang, N. (2022). D2t: A
framework for transferring detection to tracking. Pat-
tern Recognition, 126:108544.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Tang, F. and Ling, Q. (2022). Ranking-based siamese visual
tracking. In Proceedings of the IEEE/CVF Conference
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
700

on Computer Vision and Pattern Recognition, pages
8741–8750.
Uijlings, J. R. R., van de Sande, K. E. A., Gevers, T., and
Smeulders, A. W. M. (2013). Selective search for ob-
ject recognition. International Journal of Computer
Vision, 104(2):154–171.
Wang, Y., Shen, X., Hu, S. X., Yuan, Y., Crowley, J. L., and
Vaufreydaz, D. (2022). Self-supervised transform-
ers for unsupervised object discovery using normal-
ized cut. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
14543–14553.
Wu, A., Han, Y., Zhu, L., and Yang, Y. (2021). Universal-
prototype enhancing for few-shot object detection. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision, pages 9567–9576.
Xu, Q., Fang, F., Gauthier, N., Li, L., and Lim, J.-H. (2020).
Active image sampling on canonical views for novel
object detection. In 2020 IEEE International Confer-
ence on Image Processing (ICIP), pages 2241–2245.
IEEE.
Xu, X., Wang, J., Li, X., and Lu, Y. (2022). Reliable
propagation-correction modulation for video object
segmentation. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 36, pages 2946–
2954.
Yang, J., Liu, S., Li, Z., Li, X., and Sun, J. (2022). Real-time
object detection for streaming perception. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 5385–5395.
Zhu, C., Chen, F., Ahmed, U., Shen, Z., and Savvides,
M. (2021). Semantic relation reasoning for shot-
stable few-shot object detection. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 8782–8791.
Zitnick, L. and Dollar, P. (2014). Edge boxes: Locating
object proposals from edges. In European Conference
on Computer Vision.
Unsupervised Annotation and Detection of Novel Objects Using Known Objectness
701
