
Person Detection and Geolocation Estimation in UAV Aerial Images:
An Experimental Approach
Sasa Sambolek
1a
and Marina Ivasic-Kos
2b
1
High school Tina Ujevica, Kutina, Croatia
2
Faculty of Informatics and Digital Technologies, University of Rijeka and Centre for Artificial Intelligence University of
Rijeka, Rijeka, Croatia
Keywords: Drone Imagery, Deep Learning, Person Detection, YOLOv8, Search and Rescue.
Abstract: The use of drones in SAR operations has become essential to assist in the search and rescue of a missing or
injured person, as it reduces search time and costs, and increases the surveillance area and safety of the rescue
team. Detecting people in aerial images is a demanding and tedious task for trained humans as well as for
detection algorithms due to variations in pose, occlusion, scale, size, and location where a person may be in
the image, as well as poor shooting conditions, poor visibility, blur due to movement and the like. In this
paper, the YOLOv8 generic object detection model pre-trained on the COCO dataset is fine-tuned on the
customized SARD dataset used to optimize the model for person detection on aerial images of mountainous
landscapes, which are captured by drone. Different models of the YOLOv8 family algorithms fine-tuned on
the SARD set were experimentally tested and it was shown that the YOLOv8x model achieves the highest
mean average precision (mAP@0.5:0.95) of 63.8%, with an inference time of 4.6 ms which shows potential
for real-time use in SARD operations. We have tested three geolocation algorithms in real conditions and
proposed modification and recommendations for using in SAR missions for determining the geolocation of a
person recorded by drone after automatic detection with the YOLOv8x model.
1 INTRODUCTION
Object detection is a key research area within
computer vision, focusing on the precise positioning
and recognition of various objects in the image (Zou
et al., 2023). Despite achieving promising results in
ground-level object detection, the task of object
detection in aerial images is still a challenge,
especially in its application in search and rescue
(SAR) operations (Sambolek & Ivasic-Kos, 2021)
whose primary objective is to assist as soon as
possible to the casualty and save human lives.
SAR is carried out on different terrains such as
mountains, rivers, lakes, canyons. The speed of
finding a missing person directly affects their chances
of survival, so unmanned aerial vehicles (drones)
equipped with RGB cameras and sensors are
nowadays commonly included in the search missions.
The search area is inspected during the flight and
offline with the subsequent analysis of the recorded
a
https://orcid.org/0000-0002-5287-2041
b
https://orcid.org/0000-0002-1940-5089
material if the missing person is not found during the
online search. In both cases, artificial intelligence can
help track down the missing person, however, the
automatic detection of victims is still a challenge
(Andriluka et al., 2010; Bejiga et al., 2017; Doherty
& Rudol, 2007; Geraldes et al., 2019; Shakhatreh et
al., 2019; Sun et al., 2016). When analyzing the
recorded material, it is crucial not only to detect the
person in the images, but also to estimate the distance
of the person from the drone and to geolocate it so
that a SAR mission can be organized accordingly.
The primary goal of this paper is to evaluate the
effectiveness of the latest version of the widely used
YOLO object detector, YOLOv8 (Ultralytics, n.d.-c),
in detecting people in drone images. Using the
publicly available SARD dataset (Sambolek &
Ivasic-Kos, 2021) adapted for object detection in
SAR, we fine-tuned different models of the Yolov8
family and conducted an in-depth analysis and
comparison of drone-captured person detection
Sambolek, S. and Ivasic-Kos, M.
Person Detection and Geolocation Estimation in UAV Aerial Images: An Experimental Approach.
DOI: 10.5220/0012411600003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 785-792
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
785

performance. In addition, we have built custom SAR-
DAG_overflight dataset for developing and testing
the algorithm for determining the geolocation of a
detected person.
The structure of this paper is as follows: Section 2
provides an overview of previous research related to
YOLO object detectors and person geolocation
algorithms. The YOLOv8 family of models and the
performance achieved after fine-tuning on the
customized SARD dataset are described in Section 3,
followed by a description of the geolocation
algorithms proposed for use in SAR missions. The
experimental part of the work and the metrics used
are presented in Section 4 along with the results and
explanation. The concluding section highlights the
main contributions of this paper.
2 RELATED WORKS
For our proposed method of detection and
geolocation of persons in SAR missions, the object
detector and the geolocation algorithm are key. In the
following, we will focus on the review of the state-of-
the-art CNN detectors from the YOLO family
(Redmon et al., 2016), which are an example of
single-stage detectors that constantly achieve top
performance in real time, and algorithms for
deterministic geolocation.
2.1 YOLO Object Detectors
The most popular and stable version of YOLO,
showcasing improved performance with multi-scale
prediction frameworks and a deep backbone network,
was introduced by Redmon and Farhadi (Redmon &
Farhadi, 2018). Bochkovskiy et al. (Bochkovskiy et
al., 2020) developed YOLOv4, which featured
significant new features, outperforming YOLOv3 in
terms of accuracy and speed. (Ultralytics, n.d.-a)
introduced YOLOv5, along with a PyTorch-based
variant, bringing remarkable improvements. In 2022,
the Meituan Vision AI Department unveiled
YOLOv6 (Li Chuyi et al., 2022). YOLOv6 features
an efficient backbone, RepVGG or CSPStackRep
blocks, PAN topology gates, and efficient separate
heads with a hybrid channel strategy. The model also
employs advanced quantization techniques, including
post-training quantization and channel distillation,
resulting in faster and more accurate detectors. In July
of the same year, YOLOv7 (Chien-Yao Wang,
Alexey Bochkovskiy, 2023) outperformed all
existing object detectors in terms of speed and
accuracy. It follows the same COCO dataset training
approach as YOLOv4 but introduces architectural
changes and improvements that enhance accuracy
without compromising inference speed. The most
recent version of the YOLO family released in
January 2023 is YOLOv8 (Ultralytics, n.d.-c)
designed for speed and precision for various
computer vision applications (Ultralytics, n.d.-c). The
architecture of YOLOv8 can be divided into two main
components: the backbone and the head. The
backbone is like the YOLOv5 model and contains the
CSPDarknet53 architecture with 53 convolutional
layers, but with the change in the building blocks of
the C3 module. The module is now called C2f and all
outputs from the gate (bottleneck – 3x3 convolutions
with residual connections) were chained, while in C3
only the output from the last gate was used. In the
neck, the features are connected directly without
forcing the same channel dimensions, which reduces
the number of parameters and the total size of the
tensor. The head of YOLOv8 consists of several
convolutional layers, followed by fully connected
layers responsible for predicting bounding boxes,
objectivity (probability that the bounding box
contains an object), and class probabilities for
recognized objects. For class probabilities, the
softmax function is used, while the output layer uses
the sigmoid function as the activation function.
The loss functions used by YOLOv8 for
improving detection, especially when working with
smaller objects are: CIoU (Complete Intersection
over Union) and DFL (Distribution Focal Loss) for
bbox-related losses, and binary cross-entropy for
classification loss.
YOLOv8 uses an anchor-free model with a
decoupled head for independent object detection,
classification, and regression processing. This design
allows each branch to focus on its task and contributes
to improving the overall accuracy of the model.
2.2 Target Geolocation Algorithms
To calculate the geolocation of objects in the image,
an algorithm based on the Earth ellipsoid model is
usually used, (Leira et al., 2015; Sun et al., 2016;
Wang et al., 2017; Zhao et al., 2019) which uses
information about the average height, the field of
view of the camera, the width and height of the image,
the tilt of the camera and the position of the detected
point within the image. This algorithm is easy to
calculate, but it is not precise because it considers the
average elevation information as the reference height
for the target, which leads to significant positional
inaccuracies, especially in regions with significant
topographic relief. Figure 1 shows the positioning of
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
786
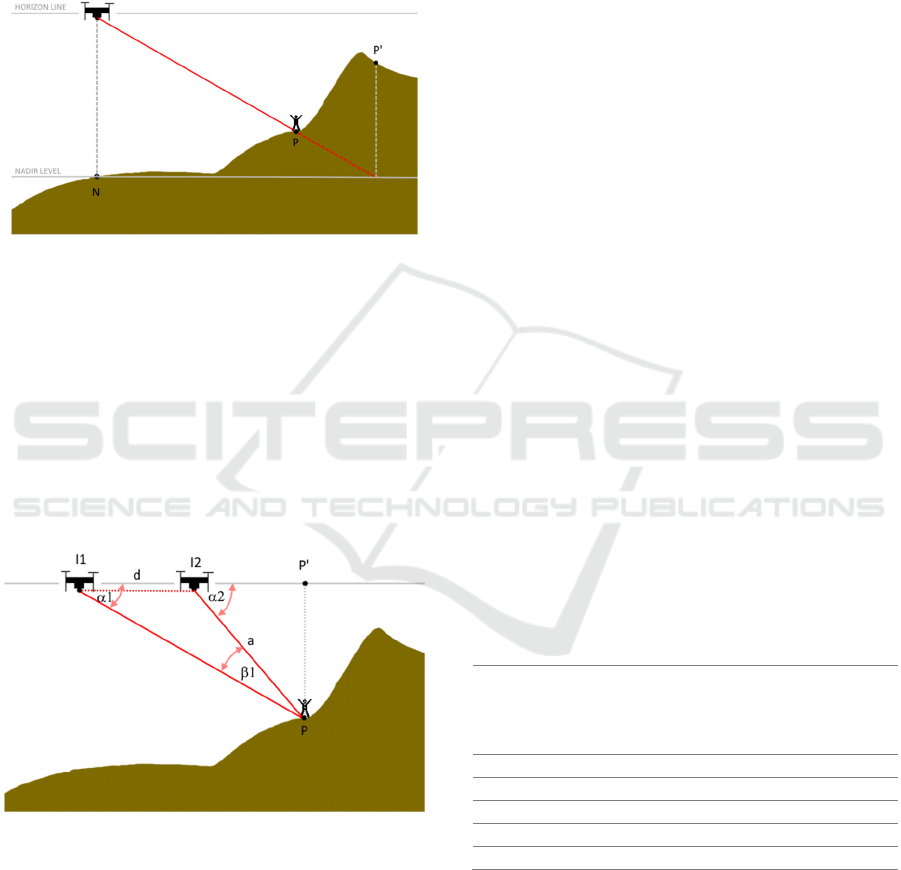
the target on the Earth's surface according to the
model of the Earth's ellipsoid and the errors that arise
due to the difference in the geodetic heights of the
point from which the drone took off and the point
where the detected person is located. In the given
scenario, the SAR operation would be carried out at
position P' instead of at position P where the person
is actually located.
Figure 1: Schematic diagram of target geolocating error
using the Earth ellipsoid model in areas with uneven terrain.
In the case of geographically complex terrains,
data that rely on the Digital Elevation Model (DEM)
(El Habchi et al., 2020), (Huang et al., 2020) can be
used. DEM includes a database of the height of any
location on Earth, expressed in relation to sea level.
In (Paulin et al., 2024) a methodology for precise
geolocation using DEM and the RayCast method was
introduced and it was shown that the use of DEM
significantly increases the accuracy of person
positioning on complex terrain.
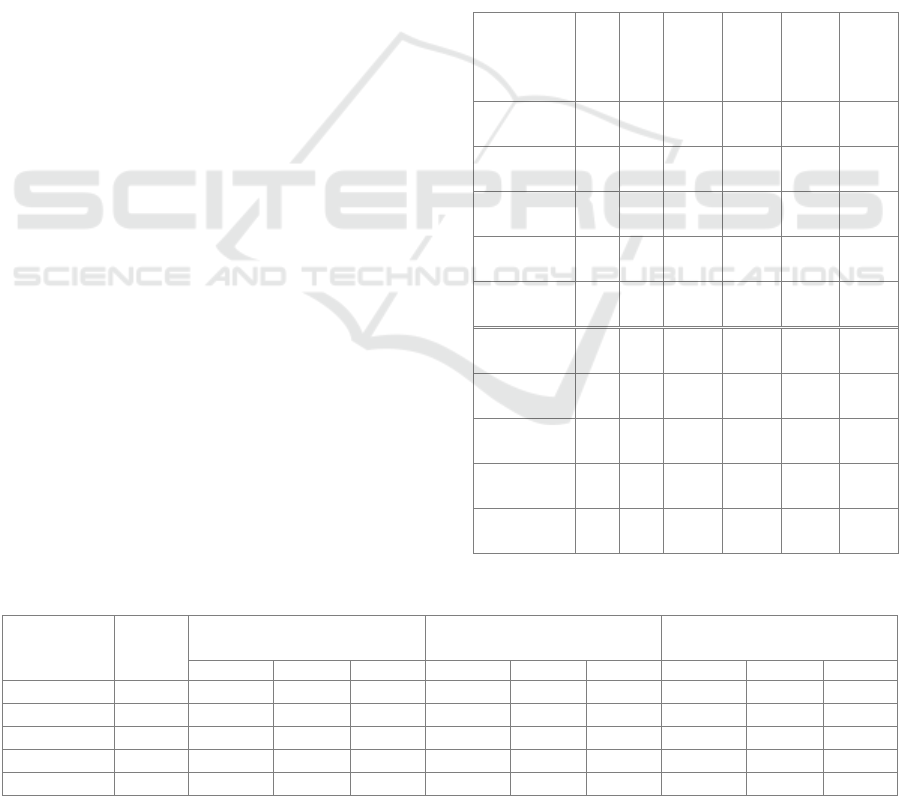
Figure 2: Two-point intersection positioning model.
Another approach focused in reducing the
elevation error includes two-point shooting on known
GPS positions (I1 and I2 on Fig. 2) at a single target
and a direction vector that usually depends on angle
sensor of drone camera (Qu et al., 2013), (Xu et al.,
2020). This algorithm can only be used for
geolocation of stationary targets because its accuracy
is significantly degraded when the target moves. The
solution is the approach in (Bai et al., 2017), which
uses two drones at positions I1 and I2, for
simultaneous recording of the same target and
determination of the cross-section and the position of
the target. However, this algorithm is not applicable
for the case of SAR due to the additional cost of the
drone that should record the same search area and due
to the safety issue where the simultaneous use of the
same airspace by multiple drones is avoided to reduce
the risk of collision.
3 PERSON DETECTION AND
GEOLOCATION IN SAR
MISSION
3.1 YOLOv8 for Person Detection
The YOLOv8 is engineered with a focus on
improving performance of real-time detection of
objects of various sizes while reducing inference time
and computing requirements (Ultralytics, n.d.-c)
which makes it potentially interesting for use in SAR
missions that generally have small objects of interest
and limited resources.
The YOLOv8 is presented in five distinct scaled
versions with different number of free parameters:
YOLOv8n, YOLOv8s, YOLOv8m, YOLOv8l, and
YOLOv8x. The YOLOv8n has the simplest
architecture with 3 million parameters, while
YOLOv8x, has 68 million parameters and shows the
best performance within the shortest time (Table 1.).
Table 1: Comparison of five YOLOv8 models, trained and
evaluated on the COCO test-dev 2017 dataset with 640 px
input, according to the report from (Ultralytics, n.d.-b).
Version of
YOLO
mAP
50-
95
Speed
CPU
ONNIX
(ms)
Speed
A100
Tensor
RT (ms)
params
(M)
YOLOv8n 37.3 80.4 0.99 3.2
YOLOv8s 44.9 128.4 1.20 11.2
YOLOv8m 50.2 234.7 1.83 25.9
YOLOv8l 52.9 375.2 2.39 43.7
YOLOv8x 53.9 479.1 3.53 68.2
We have fine-tuned all five versions of the
YOLOv8 model on the SARD dataset adapted for
object detection in SAR with two changes to the
original architecture: the input to the network was
changed to dimensions of 640 for images of 640x360
pixels, and the output, to one class (a person).
Person Detection and Geolocation Estimation in UAV Aerial Images: An Experimental Approach
787

3.2 Geolocation Estimation
In SAR missions, it is very often the case that missing
persons are motionless because they are injured
and/or exhausted. Therefore, we propose a
geolocation intersection measurement algorithm for
locating missing person, that relies on the analysis of
multiple shots taken by a single drone and uses terrain
configuration data to reduce geolocation error. The
algorithm starts to be used after a person is detected
in an image, and then an intersection is determined
with each subsequent image in which there is also a
detected person. In Figure 2, label d is the distance
between two drone positions from which the images
were captured. Angles α1 and α2 are determined in
the same manner as in (Sambolek & Ivašić-Kos, n.d.).
By applying the same rule, we calculate the length of
side I1P, which is the distance from the drone to the
person (point P) when the first image was taken, and
the length of side I2P (length a in Figure 2, equation
1), represents the distance from the location where the
second image was taken. Then, from the triangle
I2PP', we determine the length of side I2P' (Eq. 2),
based on which we calculate the GPS coordinates of
point P, considering known GPS coordinates of the
drone's position and the azimuth toward point P.
𝑎
sin 𝛼1
=
𝑑
sin 𝛽1
(1)
𝑎
sin 𝛼1
=
𝑑
sin 𝛽1
(2)
Geolocation results is the distance in meters
between two points at Earth according to the current
standard WGS 84 that is reference system used by the
GPS and identifies an Earth-centered, Earth-fixed
coordinate system with absolute accuracy of 1-2
meters. The mean error (Eq. 4) indicates the average
value of all distances ΔPi (Eq. 3) calculated between
predicted geolocation of detected points and the GT
point,
𝑃
for each image in the dataset.
Δ𝑃
= 𝐺𝑒𝑜𝑑𝑒𝑠𝑖𝑐. 𝑊𝐺𝑆84. 𝐼𝑛𝑣𝑒𝑟𝑠𝑒(𝑃
,𝑃
)
(3)
𝑀𝑒𝑎𝑛 𝐸𝑟𝑟𝑜𝑟 =
∑
Δ𝑃
𝑛
(4)
4 EXPERIMENTS
4.1 Datasets
In our study, we used two datasets, SARD and SAR-
DAG_overflight. The SARD dataset was used for
training the YOLOv8 model for person detection,
while the SAR-DAG_overflight dataset was prepared
for the validation of the geolocation algorithm of
detected persons.
4.1.1 SARD - Dataset for Training Detector
The SARD dataset was designed with a particular
focus on detecting missing or injured persons
captured by drones in non-urban terrains. The data
was recorded by a DJI Phantom 4 Advanced drone in
continental Croatia and includes 1,981 images with a
total of 6,532 people. Examples of images from the
SARD set are shown in Figure 3.
Figure 3: Examples of detections on images from the SARD
dataset with an enlarged image to better emphasize the
person in the image that needs to be detected.
The images from the SARD set are of 640 x 360
resolution and are evenly distributed in a ratio of
60:40 into a training set and a validation set based on
various factors such as background, lighting, person
pose, and camera angle. The training set contains
1,189 images with 3,921 tagged persons, while the
validation set contains 792 images with 2,611 tagged
persons (Sambolek & Ivasic-Kos, 2021).
In this experiment, we removed from the training
set all images that contained a frame with a person
with an area of less than 102 pixels, which
significantly saved the amount of computer time
during training without negatively affecting the
performance of the model. After this intervention, the
training set contains 817 images with 2017 people, of
which 1779 are small objects (area < 322 pixels) and
238 medium objects (area between 322 and 962
pixels), while there are no large objects (area > 962
pixels).
4.1.2 SAR-DAG_Overflight - Datasets for
Evaluating Geolocation Method
To test the geolocation algorithm, we created a set of
images taken at two locations, a meadow, and a
vineyard. The images were captured by a Phantom 4
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
788

Advance drone, equipped with a camera with a field
of view of 84° that flew at a height of 30 meters and
captured images at regular time intervals as is usual
in SAR missions. The images have a resolution of
5472 x 3648 pixels, and an example is given in Figure
4. The set contains 40 marked persons. From the
metadata of the images taken at the position where the
drone took off and at the position when the drone is
vertically above the person, GPS position data is
taken to obtain the starting point and the actual
position of the person on the ground.
Figure 4: Examples of SAR-DAG_overflight images with
zooming in on a part of the image where the person is.
4.2 Evaluation Metric
In the experiment, we use several standard metrics to
evaluate detector performance and metrics that we
have purpose-developed for detection and
geolocation in SAR missions as explained below.
Intersection over Union (IoU) is a traditional
metric for evaluating the performance of an object
detector calculated as the ratio of the intersection and
union of the detected bounding box and the ground
true bounding box. The equation is as follows:
𝐼𝑜𝑈 =
𝐴
𝑟𝑒𝑎 𝑜𝑓 𝑂𝑣𝑒𝑟𝑙𝑎𝑝
𝐴
𝑟𝑒𝑎 𝑜𝑓 𝑈𝑛𝑖𝑜𝑛
(5)
Higher IoU values indicate better overlap between
detection and the real data.
Recall (R) and Precision (P) are calculated as:
𝑃=
𝑇𝑃
𝑇𝑃 + 𝐹𝑃
,𝑅=
𝑇𝑃
𝑇𝑃 + 𝐹𝑁
(6)
where TP is positive detection that are true, FP is false
positives, and FN is false negative detection.
Mean average precision (mAP) is a common
evaluation metric in object detection. In the
experiment, we use mAP 50, the average precision at
IoU greater than or equal to 0.5 and mAP 50-95 the
average precision in the range of IoU from 0.5 to 0.95,
with intervals of 0.05.
For SAR operations, it is important that the
detector is optimized to have as few false positive
(FP) detections as possible, because they consume
human resources and time. Therefore, the
performance of the detector is also evaluated using
the ROpti (Recall Optimal) metric, which penalizes
false positive detections (Sambolek & Ivasic-Kos,
2021). ROpti is calculated as the ratio of the
difference between true positive (TP) and false
positive (FP) detections and the total number of
detections (TP+FN):
𝑅𝑂𝑝𝑡𝑖 =
𝑇𝑃 − 𝐹𝑃
𝑇𝑃 + 𝐹𝑁
(7)
The experiments also evaluate the accuracy of
geolocating a person using the proposed algorithm
(Section 3.2).
4.3 Experimental Results
4.3.1 YOLOv8 Person Detection
We conducted the experiments using all five versions
of the YOLOv8 models modified to detect a person
class and implemented in PyTorch using Python
version 3.9.16.
First, on the SARD validation set we tested
original YOLOv8 models trained on the COCO
dataset, and the obtained results are shown in Table
2. The confidence threshold was set to 0.25 and the
IoU threshold to 0.5.
The YOLOv8x model achieved the best result of
all YOLOv8 versions on the SARD validation set,
namely mAP@0,5 of 74.6%, recall of 49.2%, and
mAP@ 0.5:0.95 of 35%, which is significantly worse
than when tested on the COCO set. Although it is a
simplified detection task with only one class (person),
all YOLOv8 models show the same performance
degradation with many false detections (low ROpti).
Considering that the SARD set was recorded from a
completely different perspective (bird's eye view) and
with many small objects for which the models were
not trained, it was necessary to fine-tune them to
SARD datasets so that they can be used in SAR
missions.
We trained all version of YOLOv8 models for 500
epochs using Tesla T4 GPUs on the Google
Collaboratory platform while the hyperparameters
remained unchanged. We used SGD optimizer, and
the weight decay set to 5 x 10
-4
, while the initial
learning rate was set to 10
-3
. Input image size was 640
and batch size set to 16.
Detection performances on SARD validation
dataset were evaluated using standard metrics of
Person Detection and Geolocation Estimation in UAV Aerial Images: An Experimental Approach
789
Precision, Recall, mAP@0.5, and mAP@0.5:0.95,
and customized ROpti measure (Sambolek & Ivasic-
Kos, 2021). After fine-tuning on the SARD data set
all models show a significant improvement in
detection (Table 2.). The best results were achieved
by YOLOv8x with mAP@0.5 91.3% and
mAP@0.5:0.95 68.8%, which makes it the most
suitable for offline analysis of materials recorded
during drone flight because the accuracy is in that
case the most important.
The YOLOv8n model has the significantly fastest
detection of only 4.6 ms per image and achieves
mAP@0.5 only 4.5% lower than the best results. The
same is true for the YOLOv8s model, which achieves
the second-best inference time with almost the same
mAP@0.5 performance as YOLOv8x. This makes it
most suitable for use during a SAR operation when,
in addition to detection accuracy, it is important for
the model to inference quickly, in real time, and to be
used on a drone without the need for large computing
resources.
4.3.2 Person Geolocation
We have conducted a comparison of existing
geolocation methods using a simplified ellipsoidal
model of the Earth, an algorithm using DEM (Digital
Elevation Model) and an intersection measurement
algorithm. The results of the first two measurements
were taken from the paper (Sambolek & Ivašić-Kos,
n.d.). Table 3 shows the results of the distance
estimation between the calculated GPS location of a
person using the mentioned three algorithms and the
exact GPS location where the person was located. The
algorithms were tested on five different data sets, two
of which were recorded in a meadow (flat terrain),
while three were recorded in a vineyard (sloping
terrain). In data sets recorded in the meadow, no
major deviation was observed for intersection
algorithms that consider changes in the terrain
configuration (e.g., a mean error of 4.5 m for
PhantomLP1), however, on terrains with different
slopes, the intersection measurement algorithm
shows significantly better results than other
algorithms.
The best result was achieved in the first set
recorded in the vineyard (PhantomVP1), with an
average error of 4.8 meters. In the case of the Earth
ellipsoid model and the DEM model, accuracy was
checked for each image in the dataset.
If a person is detected in one image or is in motion
during the search, it is recommended to use the DEM
model to determine the geolocation. When detecting
a stationary person in multiple images, it is suggested
to use the intersection measurement algorithm, which
achieves the best results.
Table 2: Performance of five versions of the YOLOv8
model on the SARD test dataset. The first five rows
correspond to models trained on the COCO dataset and the
last five to models that are fine-tuned on the SARD dataset,
with the best results highlighted in bold.
Version of
YOLO and
training
dataset
Preci
sion
(%)
Recal
l (%)
mAP
@0,5
(%)
mAP
@
0.5:0.9
5 (%)
ROpti Speed
per
image
[ms]
YOLOv8n
@COCO
61 26 35.9 16.5 0.09 4,8
YOLOv8s
@COCO
66 37 47.5 23.8 0.18 8,5
YOLOv8m
@COCO
74 46 59.6 32 0.29 17.5
YOLOv8l@
COCO
75 47 60.7 34.5 0.31 34.5
YOLOv8x
@COCO
75 49 62.0 35.3 0.32 46.6
YOLOv8n
@SARD
93 78 86.8 54.9 0.71 4.6
YOLOv8s
@SARD
94 81 90.3 60.6 0.76 8.0
YOLOv8m
@SARD
93 83 90.6 62.1 0.77 17.3
YOLOv8l@
SARD
94 83 90.8 60.8 0.78 34.4
YOLOv8x
@SARD
95 83 91.3 63.8 0.79 46.5
Table 3: Coordinates calculation of person standing on a known location.
Dataset No. of
Images
Earth ellipsoid model
(Sambolek & Ivašić-Kos, n.d.)
DEM (Sambolek & Ivašić-
Kos, n.d.)
Intersection measurement
algorithm
MeanError MaxError MinError MeanError MaxError MinError MeanError MaxError MinError
PhantomLP1 10 8.963 10.539 7.87 13.446 14.377 12.713
PhantomLP2 10 8.704 11.595 6.212 8.439 8.832 7.592
PhantomVP1 4 18.374 29.262 8.412 10.935 15.833 5.630 4.794 5.451 4.004
PhantomVP2 7 50.488 73.028 14.427 23.604 34.681 7.327 10.534 11.139 10.351
PhantomVP3 9 51.312 98.203 22.815 29.911 66.887 14.762 12.388 14.465 9.725
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
790

5 CONCLUSIONS
In this paper, we have demonstrated that the YOLOv8
models can be successfully fine-tuned on UAV
images for person detection in real-world
environments. Our experiment was conducted on the
publicly available SARD dataset.
Furthermore, we built a set of SAR-
DAG_overflight for testing the geolocation of a
person and tested three geolocation algorithms on it:
the Earth's ellipsoid model, the DEM model, and the
modified cross-section measurement algorithm that
we proposed in the paper.
We believe that the fine-tuned YOLOv8@SARD
models that we fine-tuned at the SARD dataset and
the proposed person geolocation algorithms along
with the given recommendations can be greatly
utilized in SAR operations as they can help in the
detection of persons in drone images, and thus
contribute to providing more precise information for
coordinating the operation and reducing search time.
In future work, we plan to further investigate the
model's robustness to weather conditions, night
shooting, and camera motion blur, as well as conduct
experiments with multiple datasets to increase the
robustness and generalizability of our model.
ACKNOWLEDGMENTS
This research was partially supported by HORIZON
EUROPE Widening INNO2MARE project (grant
agreement ID: 101087348).
REFERENCES
Andriluka, M., Schnitzspan, P., Meyer, J., Kohlbrecher, S.,
Petersen, K., Von Stryk, O., Roth, S., & Schiele, B.
(2010). Vision based victim detection from unmanned
aerial vehicles. IEEE/RSJ 2010 International
Conference on Intelligent Robots and Systems, IROS
2010 - Conference Proceedings. https://doi.org/
10.1109/IROS.2010.5649223
Bai, G., Liu, J., Song, Y., & Zuo, Y. (2017). Two-UAV
intersection localization system based on the airborne
optoelectronic platform. Sensors (Switzerland), 17(1).
https://doi.org/10.3390/s17010098
Bejiga, M. B., Zeggada, A., Nouffidj, A., & Melgani, F.
(2017). A convolutional neural network approach for
assisting avalanche search and rescue operations with
UAV imagery. Remote Sensing, 9(2). https://
doi.org/10.3390/rs9020100
Bochkovskiy, A., Wang, C.-Y., & Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object
detection.
Chien-Yao Wang, Alexey Bochkovskiy, H.-Y. M. L.
(2023). YOLOv7: Trainable Bag-of-Freebies Sets New
State-of-the-Art for Real-Time Object Detectors.
Proceedings of the IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR),
7464–7475.
Doherty, P., & Rudol, P. (2007). A UAV search and rescue
scenario with human body detection and
geolocalization. Lecture Notes in Computer Science
(Including Subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics), 4830
LNAI. https://doi.org/10.1007/978-3-540-76928-6_1
El Habchi, A., Moumen, Y., Zerrouk, I., Khiati, W.,
Berrich, J., & Bouchentouf, T. (2020). CGA: A New
Approach to Estimate the Geolocation of a Ground
Target from Drone Aerial Imagery. In 4th International
Conference on Intelligent Computing in Data Sciences,
ICDS 2020. https://doi.org/10.1109/ICDS50568.2020.
9268749
Geraldes, R., Goncalves, A., Lai, T., Villerabel, M., Deng,
W., Salta, A., Nakayama, K., Matsuo, Y., &
Prendinger, H. (2019). UAV-based situational
awareness system using deep learning. IEEE Access, 7.
https://doi.org/10.1109/ACCESS.2019.2938249
Huang, C., Zhang, H., & Zhao, J. (2020). High-efficiency
determination of coastline by combination of tidal level
and coastal zone DEM from UAV tilt photogrammetry.
Remote Sensing, 12(14). https://doi.org/10.3390/
rs12142189
Leira, F. S., Trnka, K., Fossen, T. I., & Johansen, T. A.
(2015). A ligth-weight thermal camera payload with
georeferencing capabilities for small fixed-wing UAVs.
2015 International Conference on Unmanned Aircraft
Systems, ICUAS 2015. https://doi.org/10.1109/ICUAS.
2015.7152327
Li Chuyi, Li Lulu, Jiang Hongliang, Weng Kaiheng, Geng
Yifei, Li Liang, Zaidan Ke, Qingyuan Li, Meng Cheng,
Weiqiang Nie, Yiduo Li, Bo Zhang, Yufei Liang,
Linyuan Zhou, Xiaoming Xu, Xiangxiang Chu,
Xiaoming Wei, X. W. (2022). YOLOv6: A single-stage
object detection framework for industrial applications.
Paulin, G., Sambolek, S., & Ivasic-Kos, M. (2024).
Application of raycast method for person
geolocalization and distance determination using UAV
images in Real-World land search and rescue scenarios.
Expert Systems with Applications,
237.
https://doi.org/https://doi.org/10.1016/j.eswa.2023.121
495
Qu, Y., Wu, J., & Zhang, Y. (2013). Cooperative
localization based on the azimuth angles among
multiple UAVs. 2013 International Conference on
Unmanned Aircraft Systems, ICUAS 2013 - Conference
Proceedings. https://doi.org/10.1109/ICUAS.2013.
6564765
RangeKing. (n.d.). YOLO v8 architecture.
https://github.com/ultralytics/ultralytics/issues/189
Person Detection and Geolocation Estimation in UAV Aerial Images: An Experimental Approach
791

Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, real-time object detection.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2016-
December. https://doi.org/10.1109/CVPR.2016.91
Redmon, J., & Farhadi, A. (2018). Yolov3: An incremental
improvement. Tech Report.
Redmon, J., & Farhadi, A. (2017). YOLO9000: Better,
faster, stronger. Proceedings - 30th IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2017, 2017-January. https://doi.org/10.1109/CVPR.
2017.690
Ren, S., He, K., Girshick, R., & Sun, J. (2017). Faster R-
CNN: Towards Real-Time Object Detection with
Region Proposal Networks. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 39(6).
https://doi.org/10.1109/TPAMI.2016.2577031
Sambolek, S., & Ivasic-Kos, M. (2021). Automatic person
detection in search and rescue operations using deep
CNN detectors. IEEE Access, 9, 37905–37922.
https://doi.org/10.1109/ACCESS.2021.3063681
Sambolek, S., & Ivašić-Kos, M. (n.d.). Determining the
Geolocation of a Person Detected in an Image Taken
with a Drone.
Shakhatreh, H., Sawalmeh, A. H., Al-Fuqaha, A., Dou, Z.,
Almaita, E., Khalil, I., Othman, N. S., Khreishah, A., &
Guizani, M. (2019). Unmanned Aerial Vehicles
(UAVs): A Survey on Civil Applications and Key
Research Challenges. In IEEE Access (Vol. 7).
https://doi.org/10.1109/ACCESS.2019.2909530
Sun, J., Li, B., Jiang, Y., & Wen, C. Y. (2016). A camera-
based target detection and positioning UAV system for
search and rescue (SAR) purposes. Sensors
(Switzerland), 16(11). https://doi.org/10.3390/s16111
778
Ultralytics. (n.d.-a). Yolov5 GitHub. Retrieved September
15, 2023, from https://github.com/ultralytics/yolov5
Ultralytics. (n.d.-b). YOLOv8 Doc. https://docs.
ultralytics.com/tasks/detect/
Ultralytics. (n.d.-c). YOLOv8 GitHub. Retrieved September
15, 2023, from https://github.com/ultralytics/ultralytics
Wang, X., Liu, J., & Zhou, Q. (2017). Real-time multi-
target localization from unmanned aerial vehicles.
Sensors (Switzerland), 17(1). https://doi.org/10.3390/s
17010033
Xu, C., Yin, C., Han, W., & Wang, D. (2020). Two-UAV
trajectory planning for cooperative target locating
based on airborne visual tracking platform. Electronics
Letters, 56(6). https://doi.org/10.1049/el.2019.3577
Zhao, X., Pu, F., Wang, Z., Chen, H., & Xu, Z. (2019).
Detection, tracking, and geolocation of moving vehicle
from UAV using monocular camera. IEEE Access, 7.
https://doi.org/10.1109/ACCESS.2019.2929760
Zou, Z., Chen, K., Shi, Z., Guo, Y., & Ye, J. (2023). Object
Detection in 20 Years: A Survey. Proceedings of the
IEEE, 111(3). https://doi.org/10.1109/JPROC.2023.
3238524.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
792
