Conic Linear Units: Improved Model Fusion and Rotational-Symmetric
Generative Model
Changqing Fu
a
and Laurent D. Cohen
b
CEREMADE, University Paris Dauphine, PSL Research University, UMR CNRS 7534, Paris, 75016, France
Keywords:
Generative AI, Deep Learning for Visual Understanding, Machine Learning Technologies for Vision.
Abstract:
We introduce Conic Linear Unit (CoLU), a natural generalization of commonly used activation functions in
neural networks. The common pointwise ReLU activation is a projection onto the positive cone and is per-
mutation symmetric. We propose a nonlinearity that goes beyond this symmetry: CoLU is a skew projection
onto a hypercone towards the cone’s axis. Due to the nature of this projection, CoLU enforces symmetry in a
neural network with width C from the finite-order permutation group S (C) to the infinite-order rotation/reflec-
tion group O(C −1), thus producing deep features that are motivated by the HSV color representation. Recent
results on merging independent neural networks via permutation modulus can be relaxed and generalized to
soft alignment modulo an optimal transport plan (Singh and Jaggi, 2020), which is useful in aligning models
of different widths. CoLU aims to further alleviate the apparent deficiency of soft alignment. Our simula-
tion indicates that CoLU outperforms existing generative models including Autoencoder and Latent Diffusion
Model on small or large-scale image datasets. Additionally, CoLU does not increase the number of parame-
ters and requires negligible additional computation overhead. The CoLU concept is quite general and can be
plugged into various neural network architectures. Ablation studies on extensions to soft projections, general
L
p
cones, and the non-convex double-cone cases are briefly discussed.
1 INTRODUCTION
Scaling up neural networks is one thing, while reduc-
ing their redundancies is quite another. Aligning/Fus-
ing different models into a canonical form (Ashmore
and Gashler, 2015) is a useful way to simplify the
model structure and reduce its redundancy. In the
mean time, practically speaking, alignment enables
different models to collaborate with each other. The
term alignment in this context refers to fixing a base
model and transforming any alternative ones so that
the alternative model is very similar, if not equivalent,
to the base model. This similarity, in our setting, is
defined as the fact that both models can be linearly
interpolated without losing much performance. In the
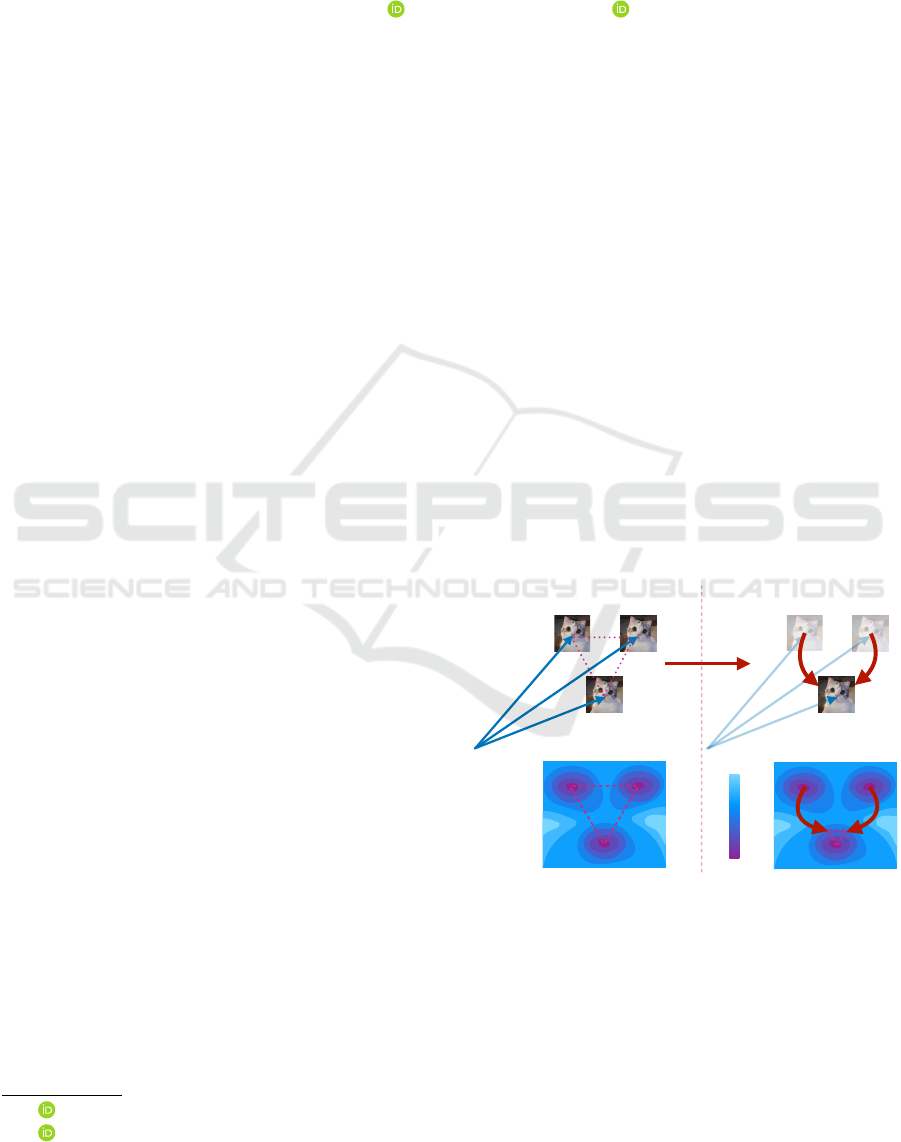
generative model case, the effect of alignment is illus-
trated in figure 1, showing that the weights of aligned
models can be linearly interpolated to obtain a model
which performs well. In other words, the symmetry of
the model’s function space (visualized by the symme-
try of the triangle in figure 1) is represented by sym-
metry group P (permutations), and we aim to let the
a
https://orcid.org/0000-0002-4485-9824
b
https://orcid.org/0000-0002-3940-645X
GM0
GM1
GM2
GM0
Modulo
P
Input Input
Group Quotient
GM0, GM1’, GM2’
GM0
GM2
GM1
GM1’ GM2’
Outputs Outputs
Loss
Landscape
Before
After
+
−
Align
Figure 1: Model Fusion. Fixing a base generative
model GM0, alternative models GM1, GM2 at differ-
ent local minima on the loss landscape are aligned as
GM1’=Align(GM1), GM2’=Align(GM2). Before the
alignment, the linear interpolation between GM0 and
GM1/GM2 has increased loss, whereas after the alignment,
this increase is reduced.
quotient space (defined in section 2) modulo P be reg-
ular, in the sense that we hope the aligned models to
be close to the base model, so that they can be merged
via linear interpolation.
686
Fu, C. and Cohen, L.
Conic Linear Units: Improved Model Fusion and Rotational-Symmetric Generative Model.
DOI: 10.5220/0012406500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
686-693
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
However, existing alignment methods are often
rough due to the fact that the function space of the
network is specific. For example, for the widely-
used pointwise activation functions, the equivariance
is limited to permutations. We propose a better de-
sign which enables smoother fusion. Meanwhile, it
is intriguing that the new structure outperforms exist-
ing ones under certain validation criteria for various
generative tasks.
1.1 Model Fusion
First of all, why do we need model fusion? We list
several aspects from both applied and theoretical per-
spectives.
Practical Uses. First, in the federated learning set-
ting when the training task is distributed to local
agents each having access to a subset of the data, fu-
sion is a way to aggregate the parallelized training
subtasks and synchronize the local models to obtain
a global result (Wang et al., 2020a). Second, in the
knowledge distillation setting when there is no ac-
cess to training data such as for safety reasons, fusion
makes it possible to directly ensemble models from
multiple teacher models as an alternative to aggregat-
ing the training data. Third, in the transfer learn-
ing setting, the expensive computation overhead of
re-training from scratch is saved by utilizing the in-
formation in multiple pre-trained models.
Theoretical Benefits. First, geometry. Associated
with the correspondence between the aligned models
is the symmetry of the network architecture’s func-
tion space: the intuitive exchangeability of the hid-
den feature maps is algebraically characterized by the
permutation modulus. In other words, CNN is equiv-
ariant under channel permutation group. Different
forms of group equivariance has led to network de-
signs with better efficiency and generalization ability.
Second, optimization. Learning the parameters of a
neural network is a non-convex optimization problem.
Alignment reshapes the loss landscape and largely
convexifies it (Garipov et al., 2018). Consequently,
the training process largely converges to a minimum
which is unique up to a transformation group. Third,
probability. A fully-connected (or convolutional)
layer is a linear ensembling among neurons (or fea-
ture maps) of previous layers. Fixing a certain set of
trained neurons as the key’s dictionary, alignment is
used to de-anonymize an arbitrary set of neurons so
that the activating behavior of an individual neuron at
the same index follows the same pattern. Each neuron
is assigned deterministically with an unrepeated key.
1.2 Probabilistic Fusion
Then a natural question arises: what if the widths of
the models to be aligned differ from each other? It’s
evident that deterministic assignment is not feasible
when fusing models of varying width. In this un-
balanced case, the assignment constraint can be re-
laxed by optimal transport. In a probabilistic sense,
each key (channel index) is not deterministically as-
signed to a neuron, but instead a fuzzy mixture of neu-
rons, whose probability values sum up to 1 (Singh and
Jaggi, 2020). However, the model formed by the new
set of neurons, each as a multi-identity mixture, does
not behave the same way as in the unaligned model,
since activating each individual neuron is no longer
feasible. To resolve this apparent deficiency naturally
caused by the relaxation, re-designing a more sym-
metric function is a must.
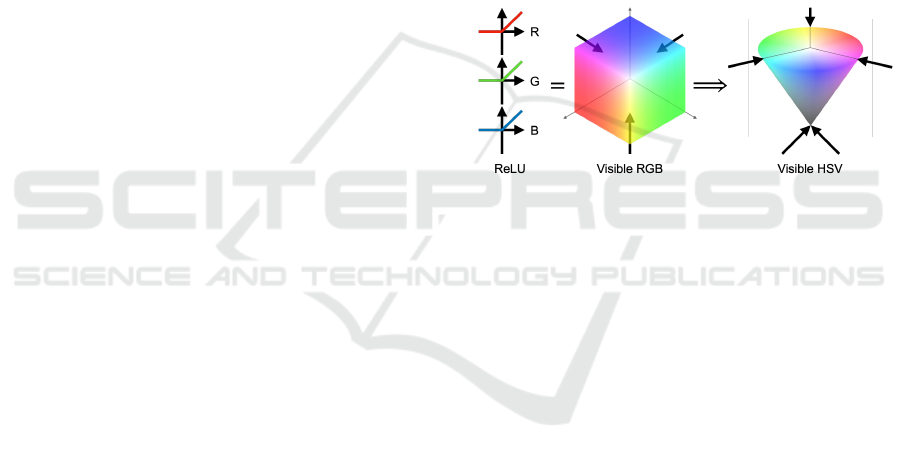
Figure 2: Conic Linear Unit (three-channel case). Left:
ReLU. Middle: equivalent projective illustration of ReLU.
Right: projective illustration of CoLU. With axes denoted
as R,G,B, a 3D vector inside the positive cone represents a
RGB color, and is visualized in the 3D space. Any points
outside the cone is not visualized since the vector does not
represent a color. The arrows point from the input to the
output of the activation function.
Conic Linear Unit: From RGB to HSV. The pro-
posed activation is termed as Conic Rectified Linear
Unit (abbreviated as CoReLU or CoLU for short),
named after Rectified Linear Unit (ReLU). The point-
wise ReLU is generalized to pixel-wise CoLU in the
following way.
In the special case of three channels, CoLU is
naturally motivated by switching from Red-Green-
Blue (RGB) to the Hue-Saturation-Value (HSV) color
representation, visualized in figure 2. ReLU is at-
tending to perceptible color defined by the posi-
tive octant, where color components which are too
dark (negative-valued) are not perceivable (mapped to
zero). Instead of ReLU which preserves positive val-
ues, CoLU preserves low values on saturation, which
means saturation values larger than a threshold value
(proportional to the luminosity value) are mapped to
the maximal threshold.
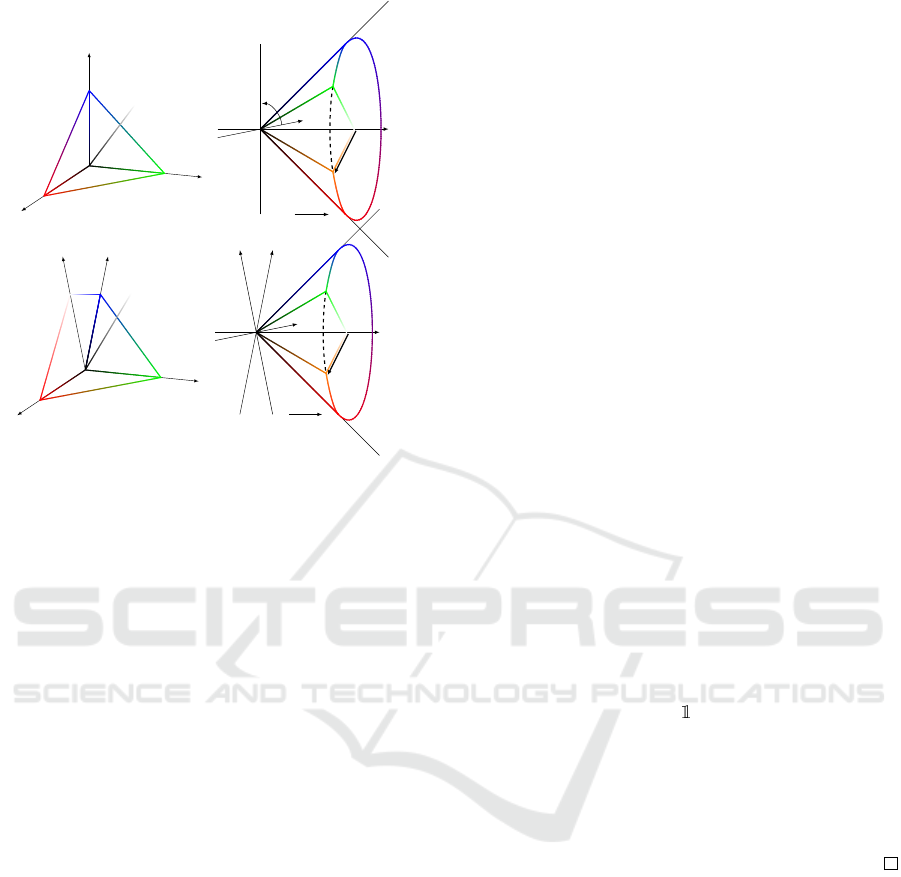
In high dimensions as is shown in figure 3, where
the token space does not represent a color, migration
Conic Linear Units: Improved Model Fusion and Rotational-Symmetric Generative Model
687
R
G
B
(1, 0, 0)
(0, 1, 0)
(0, 0, 1)
O
1 =(1, 1, 1)
O
V
S
H
Hue
e
1
=(1, 0, 0)
Chroma
Value
c
1
c
2
c
3· · ·
O
1 = (1, 1, . . .)
O
c
1
c
2
c
3···
S
C≠1
e
1
=(1, 0,...)
Îx
≠1
Î
2
x
1
Figure 3: Conic Linear Units, from 3 channels to many
channels. Top: cartesian axes of positive cones of ReLU
and CoLU in three dimensions. Bottom: generalizations to
high-dimensional space.
from the positive hypercone to the round hypercone
motivates CoLU in hidden layers. Closed-form for-
mula of CoLU is detailed in section 3.
Contributions. We propose CoLU, a class of acti-
vation functions which present convolutional neural
networks with rotational symmetry in the channel di-
mension. In principle, CoLU achieves improved soft
alignment using optimal transport which is useful in
federated learning. Intriguingly, CoLU outperforms
baseline generative models on several tasks.
Organization of Sections. After introducing pre-
liminaries in section 2, we define CoLU in section 3,
and describe the fusion algorithm in section 4. Quan-
titative improvements of conic activation and high-
resolution generation results are presented in section
5.1. Then, weight alignment for both recognition and
generative models are experimented in section 5.2.
Related works are discussed in section 6 and the paper
is concluded in section 7.
2 PRELIMINARIES
Consider a neural network learned on paired data
(x
0
,y), where the input and output are sampled from
random variables following some data distribution
(x
0
,y) ∼ µ. The network is parameterized with weight
W = {W
ℓ
}
T
ℓ=1
trained from initialization W ∼ π, and
the layer outputs are a sequence of hidden states
{x(ℓ)}
T
ℓ=0
, with terminal layers being the input x(0) =
x
0
and output x(T ) = y respectively.
Definition 1 (Equivariance). A group P’s action on
a space M is defined by P × M → M, (P,x) 7→ Px,
∀P ∈ P,x ∈ M. A function f : M → M is said to admit
the group P, or being equivariant under group ac-
tion P if and only if the function commutes with the
left multiplication as f ◦ P = P ◦ f ,∀P ∈ P. Here P is
called an alignment.
Definition 2 (Hidden State Alignment). Two hidden
states x
(0)
(ℓ) and x
(1)
(ℓ) are equivalent up to an
alignment if and only if there exists an alignment P
such that x
(1)
(ℓ) = Px
(0)
(ℓ), denoted as a relation
x
(0)
(ℓ) ∼
P
x
(1)
(ℓ). Two neural networks are equiv-
alent if and only if all hidden states are equivalent,
that is ∀ℓ = 1,. .., T − 1, x
(0)
(ℓ) ∼
P
x
(1)
(ℓ), denoted
as x
(0)
∼
P
x
(1)
.
Example 1 (CNN with Pointwise Activation). The
CNN’s symmetry group P is channel permutations. A
CNN (without skip connections) is defined by
x(ℓ + 1) = W
ℓ
⋆ λ(x(ℓ)) (1)
where λ is a pointwise activation such as
ReLU, and the convolution is defined as
(w ⋆ x)(σ,ω
1
,ω
2
) =
∑
C
′
σ
′
=1
∑
(ω
′
1
,ω
′
2
)∈Ω
′
x(σ
′
,ω
1
+
ω
′
1
,ω
2
+ ω
′
2
)w(σ,σ
′
,ω
′
1
,ω
′
2
) where Ω
′
is a small
convolution window. The channel permutation
group is defined as P = S (C) := {P
ℓ
∈ R
C×C
:
∃ permutation σ,(P
ℓ
)
i j
=
{ j=σ(i)}
∀i = 1,...,C}.
Proof. Pointwise activation function commutes with
permutation as Pλ(x) = λ(Px), and since the align-
ment is along the channel axis, by exchanging the or-
der of multiplication and sum in the definition of con-
volution, we obtain (PW) ⋆ x = W ⋆ (Px). Therefore
x 7→ W
ℓ
⋆ λ(x) and P commutes.
Theorem 1 (Weight Alignment). The CNN’s hid-
den state alignment is equivalent to weight align-
ment. The weight alignment is defined as W
(1)
ℓ
=
P
ℓ
W
(0)
ℓ
P
−1
ℓ−1
,∀ℓ = 1,...,T − 1, and denoted as
W
(0)
ℓ
∼
P
W
(1)
ℓ
.
Proof. Fix a base neural network with states x
(0)
(ℓ)
and parameters W
(0)
ℓ
. By definition of hidden state
alignment, equation 1 is written as P
−1
ℓ
x
(1)
(ℓ) =
W
(0)
ℓ
⋆ λ(P
−1
ℓ−1
x
(0)
(ℓ − 1)) where P is a group element
and hence invertible. Since pointwise activation is
equivariant under permutation, this is equivalent to
x
(1)
(ℓ) = P
ℓ−1
W
(0)
ℓ
⋆
P
−1
ℓ−1
λ(x
(0)
(ℓ − 1))
Finally by
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
688
equivariance of convolution under channel permuta-
tion we obtain x
(1)
(ℓ) =
P
ℓ
W
(0)
ℓ
P
−1
ℓ−1
⋆ λ(x
(0)
(ℓ −
1)).
Definition 3 (Quotient Space). The set of equivalent
classes is defined as [x] = {y ∈ M : x ∼ y} where x ∈ M
is called a representative. Given a relation ∼
P
on a
space M, the quotient space denoted by M/ ∼
P
or
simply M/P is defined as the set of equivalent classes
M/ ∼
P
:= {[x] : x ∈ M} ⊂ 2
M
.
Conjecture 1 (Fusion by Linear Interpolation). Two
neural network weights W
(0)
ℓ
and W
(1)
ℓ
with the same
structure (probably with different channel sizes),
which are obtained by different data and initializa-
tion (π
(0)
,µ
(0)
) and (π
(1)
,µ
(1)
) respectively, have rep-
resentatives which can be interpolated so that the loss
function remains low on the interpolated weight.
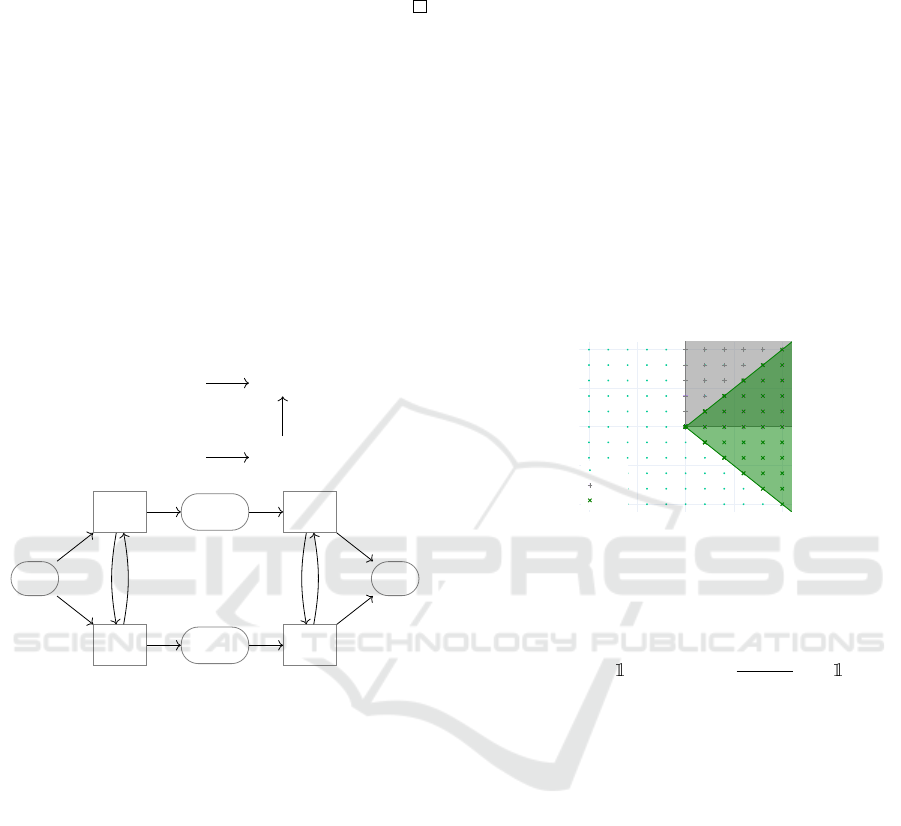
(π
(0)
,µ
(0)
) W
(0)
(π
(1)
,µ
(1)
) W
(1)
Optim
Optim
Align
x(0)
W
(0)
1
W
(1)
1
x
(0)
(1)
x
(1)
(1)
W
(0)
2
W
(1)
2
x(2)
P
0
P
−1
1
P
1
P
−1
2
Figure 4: Model Fusion. Top: different models (indepen-
dently trained on different datasets or initializations) coin-
cides in the same loss basin by means of weight alignment.
Bottom: diagram of the per-layer channel alignment P
ℓ
.
The alignment is illustrated in figure 4. To fa-
cilitate our conjecture of model fusion, a new class
of activation functions is designed so that it admits a
larger (infinite-order) alignment group namely (C −
1)-channel rotations around the first axis P := {P
ℓ
∈
R
C×C
: P
ℓ
[2,.. .,C;2,. ..,C] ∈ O(C −1)}, where O(C)
is the set of C-dimensional orthogonal matrices.
3 CONIC LINEAR UNITS
Projective Form. Let x = (x
1
,.. .,x
C
) be the in-
put of the activation function where C is the network
width. Inspired by ReLU
ReLU(x) = Proj
V
+
(x) = x
+
(2)
whose projected cone V
+
= R
C
+
= {x ∈ R
C
: x
i
≥ 0,i =
1,.. .,C} is the positive cone, CoLU is defined as
CoLU(x) = Proj
V ∩H(x)
(x) = argmin
y∈V
(y−x)⊥e
∥y − x∥
2
, (3)
where the hypercone is V = {x ∈ R
C
: ∥x
⊥
e
∥
2
≤ tx · e}
with e being the unit vector in the axis direction, x =
x · e+x
⊥
e
, meaning x
e
is parallel to e and x
⊥
e
is perpen-
dicular to e, and the cone’s cross-section hyperplane
is H(x) = {y ∈ R
C
: y · e = x · e} whose normal vector
is e. t > 0 is the tangent value of the opening angle
of the cone. We set t = 1 and e = e
1
= (1,0, ... ,0)
without loss of generality.
In comparison of pointwise activations, CoLU is
attending to the round hypercone instead. The two
dimensional case is illustrated in figure 5.
input
ReLU
CoLU
Figure 5: ReLU and CoLU’s projective cone in 2D.
Closed Form. CoLU is a closed-form and auto-
differentiable activation as a drop-in replacement of
pointwise activations.
CoLU(x)
i
= x
V
+ (x
1
+
e
1
+
x
1
∥x
−1
∥
2
x
−1
)
V
c
=
(
clamp(x
1
∥x
−1
∥
2
,0,1)x
i
, i = 2, ... ,C
max{x
1
,0}, i = 1
(4)
where x
−1
= (0,x
2
,.. .,x
C
), clamp(x,a,b) =
min{max{x,a}, b}, V
c
is the complement set of
V ⊆ R
C
. In practice, ∥x
−1
∥ is replaced with
(∥x
−1
∥+ ε) where ε is a small constant, for numerical
stability.
Extensions of Conic Linear Unit
Soft Projection. Inspired by Sigmoid-Weighted
Linear Units (SiLU) SiLU(x) = x sigmoid(x), CoLU
can be relaxed as a soft projection.
CoSiLU(x)
i
=
(
sigmoid(x
1
∥x
−1
∥ − 0.5)x
i
, i ≥ 2
max{x
1
,0}, i = 1
(5)
L
p
-Cones. CoLU can also be extended to the case
of L
p
cones where p ∈ R
+
∪ {∞}.
Conic Linear Units: Improved Model Fusion and Rotational-Symmetric Generative Model
689

CoReLU
p
(x)
i
=
(
clamp(x
1
∥x
−1
∥
p
,0,1)x
i
, i ≥ 2
max{x
1
,0}, i = 1
(6)
Non-convex Double-Cones. Replacing the cone
with a signed cone,
CoReLU
±
(x)
i
=
(
clamp(x
1
∥x
−1
∥,−1,1)x
i
, i ≥ 2
x
1
, i = 1
(7)
4 MODEL FUSION
4.1 Model Alignment
With proper permutations, the aligned weights
P
ℓ
W
(1)
ℓ
P
⊤
ℓ−1
live in the same basin with the reference
model relatively. More precisely, define interpolated
weight as
W
(λ)
ℓ
= (1 − λ)W
(0)
ℓ
+ λP
ℓ
W
(1)
ℓ
P
⊤
ℓ−1
,λ ∈ [0,1], (8)
then the loss barrier L(W
(λ)
) as a function over λ is
a concave function for P
ℓ
= I, ∀ℓ = 1, ... ,T , and this
barrier is largely flattened after the alignment, illus-
trated in figure 8 in the experiment session.
Algorithm 1: Soft Alignment via Optimal Transport.
Data: W
(0)
,W
(1)
; // Pre-Trained
Reference and Alternative Models
Data: P
ℓ
← I
C
ℓ
; // Initialization
Data: ε ; // Small Constant
Result: P = argmax
P
ℓ
∈Π(1,1)
∑
T
ℓ=1
⟨W
(0)
ℓ
,P
ℓ
W
(1)
ℓ
P
⊤
ℓ−1
⟩
F
P
ℓ
← I
C
ℓ
; // Initialization
ε ; // Small Constant
S,S
prev
← −∞ ;
repeat
S
prev
← S ;
for ℓ ← RandPerm({1,..., T − 1}) do
P
ℓ
← argmax
P
ℓ
1=1,P
ℓ
⊤
1=1
⟨W
(0)
ℓ
,P
ℓ
W
(1)
ℓ
P
⊤
ℓ−1
⟩
F
+
⟨W
(0)
ℓ+1
,P
ℓ+1
W
(1)
ℓ+1
P
⊤
ℓ
⟩
F
;
end
S ←
∑
T
ℓ=1
⟨W
(0)
ℓ
,P
ℓ
W
(1)
ℓ
P
⊤
ℓ−1
⟩
F
;
until S ≤ S
prev
+ ε;
4.2 Optimal Alignment
The algorithm to find the optimal permutation is max-
imizing the Frobenius product between the reference
model and the aligned model, by using either the
weights or activations. Both cases are referred to as
Figure 6: Geometry of point-wise activations ℓ
0
(left) ver-
sus that of CoLU ℓ
2
(right) and their comparisons to OT
space.
weight matching and activation matching respec-
tively, and we focus on the first method which doesn’t
require training data. It reduces to a Sum of Bilinear
Assignment Problem (SOBAP), and is approximated
by solving the Linear Assignment Problem sequen-
tially in a greedy manner, whose convergence is ana-
lyzed in (Ainsworth et al., 2023).
Each permutation P
ℓ
for ℓ = 1, ... ,T − 1 takes
the form of a permutation matrix P ∈ S (C
ℓ
). Fixing
P
ℓ−1
,P
ℓ+1
obtained in the outer loop, the linear as-
signment problem is stated as
max
P
ℓ
∈S (C
ℓ
)
⟨W
(0)
ℓ
,P
ℓ
W
(1)
ℓ
P
⊤
ℓ−1
⟩
F
+ ⟨W
(0)
ℓ+1
,P
ℓ+1
W
(1)
ℓ+1
P
⊤
ℓ
⟩
F
(9)
where the input and output channel spaces are fixed
and not aligned, meaning P
0
= I
C
0
,P
T
= I
C
T
. Equiv-
alently, the linear optimization objective in equation 9
can be written as
∑
C
i, j=1
C
i j
P
i j
.
4.3 Algorithm: Optimal Transport
The constraint of permutation matrices P
ℓ
∈ S(C
ℓ
) can
be relaxed to probabilistic assignment matrices whose
marginals are ones in both dimensions Π(1, 1) = {P ∈
R
C×C
:
∑
i
P
i j
=
∑
j
P
i j
= 1,∀i, j}, also known as bi-
stochastic matrices. This is useful especially in the
more general case when the layer width C
ℓ
differs
between the two models, and it’s an instance of op-
timal transport. Using entropic regularization and
the Sinkhorn’s algorithm, the time complexity can be
accelerated from O(C
2
) by Linear Programming to
O(C) by fixed-point method. The Kantorovich relax-
ation of optimal transport problem is stated as:
min
P1=1,P
⊤
1=1
C
∑
i, j=1
C
i j
P
i j
+ εH(P) (10)
where the cost matrix C is given in equation 9, and
H(P) = −P
i j
(logP
i j
− 1) is an entropic regulariza-
tion term scaled by ε > 0. However, the relaxation
of Optimal Transport breaks the model, since a neural
network is permutation equivariant, but not channel-
wise interpolation equivariant. Figure 6 explains the
reason why CoLU is a better choice for fusion.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
690
5 EXPERIMENTS
5.1 Generative Performance of CoLU
Table 1: Performance of point-wise activation (SiLU) ver-
sus CoSiLU (Ours).
Performance SiLU CoSiLU
Symmetry Group S (C) O(C −1)
# Symmetries C
T
∞
Time Complexity O(C) O(C)
PSNR / dB (↑) 24.53 ± 2.54 25.83 ± 2.52
IS (↑) 7.23 ± 0.08 8.04 ± 0.94
KID / ×10
−3
(↓) 6.35 ± 0.77 2.71 ± 0.50
SSIM / ×10
−1
(↑) 8.61 ± 0.55 8.93 ± 0.44
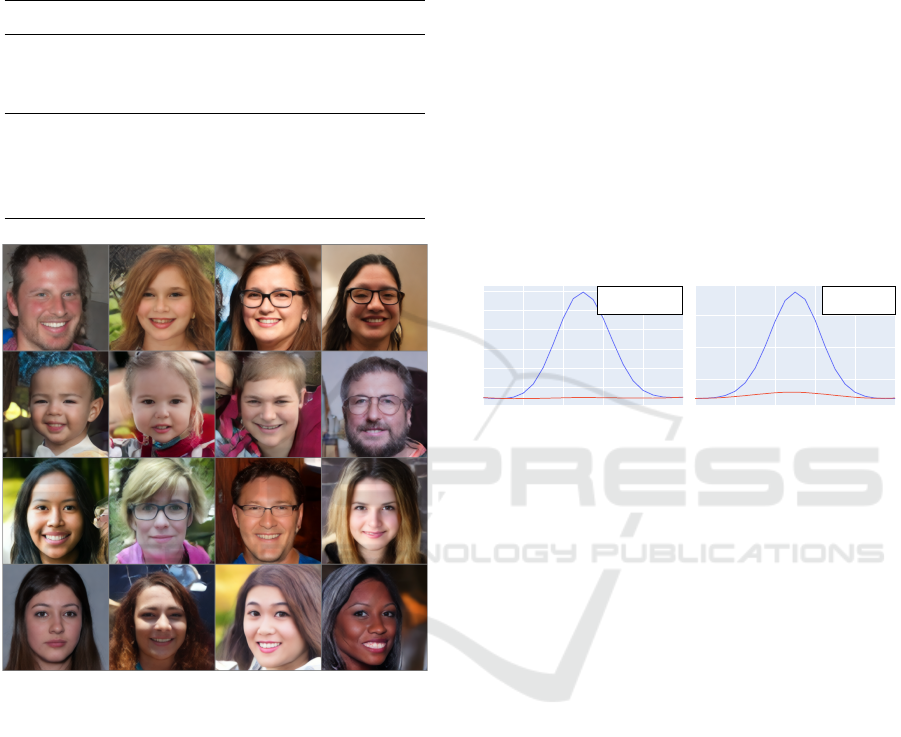
Figure 7: Generation results of CoLU-LDM on FFHQ.
Two tasks are experimented: image reconstruction
task with autoencoder with regularization of Genera-
tive Adversarial Networks (GAN), and in image gen-
eration with Diffusion Models (DM).
Image Reconstruction. We follow the autoencoder
architecture in (Rombach et al., 2022) to build a vari-
ational autoencoders enhanced with GAN and per-
ceptual loss regularizations, and replace the Sigmoid
Linear Unit activation, SiLU(x) = x softmax(x), with
CoSiLU in equation 5. The model is trained on
the CIFAR10 dataset (Krizhevsky and Hinton, ).The
models are trained using 8×NVIDIA A100 GPUs un-
til convergence, which typically occurs around 200 ∼
300 epochs. The hyperparameters involve a base
learning rate of 10
−7
, a batch size of 64, and other
parameters as stated in LDM. We validate multiple
evaluation measures including peak signal-to-noise
ratio (PSNR), Inception Score (IS) (Salimans et al.,
2016), Kernel Inception Distance (KID) (Bi
´
nkowski
et al., 2018), and Structural Similarity Index Measure
(SSIM) (Wang et al., 2004). Results are shown in
table 1. The generated samples and loss curves are
shown in the appendix.
High-resolusion Image Generation. Then we val-
idate CoSiLU on FFHQ (Karras et al., 2019) and
AFHQ (Choi et al., 2018) datasets. It is shown that on
both datasets, CoSiLU-based diffusion models pro-
duces sharp results and work on par with SiLU ac-
tivation. Generated high-resolution images trained on
FFHQ are shown in figure 7.
5.2 Model Fusion
0 0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
1.2
before alignment
after alignment
ReLU+Perm
0 0.2 0.4 0.6 0.8 1
0.5
1
1.5
before alignment
after alignment
CoLU+OT
Figure 8: Seamless Model Fusion. Loss function along
the linear interpolation between two models independently
trained from different initializations of fully-connected
models on MNIST dataset. The blue line is na
¨
ıve interpola-
tion, and the red line is interpolation after alignment. Left:
ReLU network with permutation alignment. Right: CoLU
network with soft alignment. Both alignments successfully
align alternative models towards the base one.
Fusing Recognition Models. Alignment of
MNIST recognition models are performed on the
same network as above with three fully-connected
layers and two nonlinearities. As is shown in figure
8, both CoLU and ReLU aligns models with permu-
tation modulus or optimal transport, which applies to
networks with varying width.
Fusing Generative Models. CoLU was designed
aiming at a goal of merging generative models. Figure
9 shows partial milestone towards this goal, namely
it’s possible to align two super-resolution model so
that their interpolation path is closer to the ground-
truth of the output. Here it shows a lightening of the
output. The super resolution model follows ESPCN
(Shi et al., 2016), where all settings follow the origi-
nal work. We observe an alleviation of the darkening
effect after alignment. The base model and the al-
ternative model are initialized with independent and
identically distributed weights.
Conic Linear Units: Improved Model Fusion and Rotational-Symmetric Generative Model
691

Before
After
Figure 9: Fusing generative models. Outputs of models whose parameters are interpolated between two super-resolution
models trained from different initializations. Top row: no alignment. Bottom row: the second model is aligned towards the
first model, where intermediate outputs are brighter.
Figure 10: Fusing fine-tuned models. Outputs of interpolated models between a Diffusion Model with parameters W
0
and a
Diffusion Model with parameters W
1
fine-tuned from the previous model on the dataset of three cat images on the right. More
precisely, the 6 left images represent the outputs from a diffusion model whose parameters are W = (1 − λ)W
0
+ λW
1
where
λ = 0,
1
5
,
2
5
,
3
5
,
4
5
,1. λ = 0 corresponds to no fine-tuning and λ = 1 corresponds to the fine-tuned model.
Figure 10 is another result showing that diffusion
model might be a more suitable choice than single-
pass generative models for fusion via interpolation.
The interpolating effect between two dependent dif-
fusion models. Instead of aligning, the right image
is output by a model fine-tuned (continually trained)
using the three images shown on the right following
(Ruiz et al., 2022). The generated images present no
perceptible degradation of quality. The smooth inter-
polation and sharp outcome presents the feasibility of
merging dependent models by linear interpolation.
6 RELATED WORKS
Equivariant Network. Convolutional weight shar-
ing (LeCun et al., 1989) is a successful example of
imposing spatial homogeneity on the 2D image can-
vas as a successful a priori assumption upon the net-
work architecture. The introduction of CoLU con-
siders new homogeneity on the channel dimension.
More generally, (Weiler and Cesa, 2019) conducts
a review on equivariant nonlinearities in neural net-
works and studies certain special forms of nonlinear
functions, such as point-wise activations, individual
subspace (pixel-wise) activations, norm nonlineari-
ties, etc., which do not cover the case of CoLU.
Disentangling the Channel Dimension. Related to
the permutation equivariance is the homogeneity of
the channel indice’s space. It is a crucial subject
in convolutional neural networks since it has been
proven that local spatial correlation can be suffi-
ciently characterized with deterministic wavelet fil-
ters (Bruna and Mallat, 2013). Combined with
learned pixel-wise linear transform, or 1-by-1 convo-
lution, invariant scattering networks are sufficient to
achieve high performance in recognition tasks. There-
fore, disentangling the channel dimension is the miss-
ing ingredient in simplifying neural networks, where
various assumptions can be imposed. For instance,
sparsity as strong as block-diagonal in the channel di-
mension results in group convolution. Orthogonal-
ity results in spectrum-preserving weights. In the
case of convolutional neural networks, the authors
of (Wang et al., 2020b) propose an orthogonality-
inducing regularization term to ensure that the con-
volutional weights are empirically orthogonal. The
link to CoLU is close since the symmetric property of
CoLU is exactly pixel-wise rotation/reflection equiv-
ariance, which bridges the gap of the symmetry bot-
tleneck caused by the permutation-restrictive point-
wise activations.
Model Alignment. Merging trained models by ex-
ploiting permutation symmetry of pointwise activa-
tions has led to a fruitful line of research (Ashmore
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
692

and Gashler, 2015; Wang et al., 2020a). Recently
in (Ainsworth et al., 2023), deep recognition mod-
els like ResNet-50 are also align-able by deterministi-
cally matching weights. We continue on this path and
further explore the merit of a more symmetric activa-
tion function to improve the merging effect, on both
recognition and generative models.
7 CONCLUSION
We have introduced a new class of activation func-
tions called Conic Linear Units. Our contribu-
tion allows neural networks to possess infinite-order
group symmetry beyond channel permutations, which
was previously unattainable. This novel design ad-
dresses the apparent deficiency by incorporating soft-
alignment through optimal transport. Moreover, it
outperforms baseline results in terms of image gen-
eration quality.
ACKNOWLEDGEMENT
This work was funded in part by the French govern-
ment under management of Agence Nationale de la
Recherche as part of the ”Investissements d’avenir”
program, reference ANR-19-P3IA-0001 (PRAIRIE
3IA Institute). This work was granted access to
the HPC resources of IDRIS under the allocation
2022-AD011013178 made by GENCI, and supported
by cloud TPU from Google’s TPU Research Cloud
(TRC). We thank Ir
`
ene Waldspurger, Jalal Fadili,
Gabriel Peyr
´
e and Gr
´
egoire Szymanski for insightful
suggestions on the draft of the paper.
REFERENCES
Ainsworth, S., Hayase, J., and Srinivasa, S. (2023). Git
re-basin: Merging models modulo permutation sym-
metries. In The Eleventh International Conference on
Learning Representations.
Ashmore, S. and Gashler, M. (2015). A method for find-
ing similarity between multi-layer perceptrons by for-
ward bipartite alignment. In 2015 International Joint
Conference on Neural Networks (IJCNN), pages 1–7.
IEEE.
Bi
´
nkowski, M., Sutherland, D. J., Arbel, M., and Gretton,
A. (2018). Demystifying MMD GANs. In Interna-
tional Conference on Learning Representations.
Bruna, J. and Mallat, S. (2013). Invariant scattering convo-
lution networks. IEEE transactions on pattern analy-
sis and machine intelligence, 35(8):1872–1886.
Choi, Y., Choi, M., Kim, M., Ha, J.-W., Kim, S., and Choo,
J. (2018). Stargan: Unified generative adversarial net-
works for multi-domain image-to-image translation.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 8789–8797.
Garipov, T., Izmailov, P., Podoprikhin, D., Vetrov, D. P., and
Wilson, A. G. (2018). Loss surfaces, mode connectiv-
ity, and fast ensembling of dnns. Advances in neural
information processing systems, 31.
Karras, T., Laine, S., and Aila, T. (2019). A style-based
generator architecture for generative adversarial net-
works. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
4401–4410.
Krizhevsky, A. and Hinton, G. Technical report.
LeCun, Y., Boser, B., Denker, J., Henderson, D., Howard,
R., Hubbard, W., and Jackel, L. (1989). Handwrit-
ten digit recognition with a back-propagation network.
Advances in neural information processing systems, 2.
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and
Ommer, B. (2022). High-resolution image synthesis
with latent diffusion models. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 10684–10695.
Ruiz, N., Li, Y., Jampani, V., Pritch, Y., Rubinstein, M., and
Aberman, K. (2022). Dreambooth: Fine tuning text-
to-image diffusion models for subject-driven genera-
tion.
Salimans, T., Goodfellow, I., Zaremba, W., Cheung, V.,
Radford, A., Chen, X., and Chen, X. (2016). Im-
proved techniques for training gans. In Lee, D.,
Sugiyama, M., Luxburg, U., Guyon, I., and Garnett,
R., editors, Advances in Neural Information Process-
ing Systems, volume 29. Curran Associates, Inc.
Shi, W., Caballero, J., Huszar, F., Totz, J., Aitken, A. P.,
Bishop, R., Rueckert, D., and Wang, Z. (2016). Real-
time single image and video super-resolution using
an efficient sub-pixel convolutional neural network.
In 2016 IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1874–1883. IEEE
Computer Society.
Singh, S. P. and Jaggi, M. (2020). Model fusion via optimal
transport. Advances in Neural Information Processing
Systems, 33:22045–22055.
Wang, H., Yurochkin, M., Sun, Y., Papailiopoulos, D.,
and Khazaeni, Y. (2020a). Federated learning with
matched averaging. In International Conference on
Learning Representations.
Wang, J., Chen, Y., Chakraborty, R., and Yu, S. X. (2020b).
Orthogonal convolutional neural networks. In Pro-
ceedings of the IEEE/CVF conference on computer vi-
sion and pattern recognition, pages 11505–11515.
Wang, Z., Bovik, A., Sheikh, H., and Simoncelli, E. (2004).
Image quality assessment: from error visibility to
structural similarity. IEEE Transactions on Image
Processing, 13(4):600–612.
Weiler, M. and Cesa, G. (2019). General e (2)-equivariant
steerable cnns. Advances in Neural Information Pro-
cessing Systems, 32.
Conic Linear Units: Improved Model Fusion and Rotational-Symmetric Generative Model
693
