
A Toolset for Constraint Programming
Thibault Falque
1,2 a
and Romain Wallon
2 b
1
Exakis Nelite, France
2
CRIL, Univ Artois & CNRS, France
Keywords:
Tools, Constraint Programming, Solver Interface, Remote Control.
Abstract:
Constraint Programming (CP) allows solving combinatorial problems across various domains. Numerous
solvers and tools have been developed in this area. However, their interoperability is often limited. This
paper presents a suite of tools for constraint programming, consisting of a solver interface and a remote
control application. The solver interface offers a unified API for interacting with different solvers of various
programming languages. Based on this API, we present a remote control system enabling to configure the
solver and to observe and analyze its behaviour while it is running.
1 INTRODUCTION
Constraint Programming (CP) is a powerful paradigm
to solve complex combinatorial problems across var-
ious domains. In this paper, we consider CP in
a broad sense, including the Boolean satisfiability
problem (SAT) (Biere et al., 2021), its generaliza-
tion to pseudo-Boolean (PB) problems (Roussel and
Manquinho, 2021), and general constraint program-
ming as defined for instance in (Rossi et al., 2006)
(Lecoutre, 2009).
For these different paradigms, numerous solvers
have been proposed such as Kissat (Biere and
Fleury, 2022), Glucose (Audemard and Simon, 2018),
RoundingSat (Elffers and Nordstr
¨
om, 2018), Sat4j
(Le Berre and Parrain, 2010), ACE (Lecoutre, 2023),
Choco (Narendra Jussien, 2008), or Picat (Zhou et al.,
2015). These solvers often have very different pro-
gramming interfaces. Choosing one solver or an-
other thus imposes to follow this particular interface
when using the solver as a library. To face this is-
sue, generic interfaces like IPASIR or IPAMIR have
been developed to provide a simple common inter-
face for incremental SAT and MaxSAT solvers, espe-
cially in the context of the SAT Competition and the
MaxSAT Evaluation. Moreover, different formats and
tools have been developed to represent the problems
to solve, such as DIMACS (DIMACS, 1993) for SAT,
OPB for PB problems and OPL (van Hentenryck,
a
https://orcid.org/0000-0003-2803-1530
b
https://orcid.org/0000-0001-7200-4279
1999), MiniZinc (Nethercote et al., 2007) (Stuckey
et al., 2010), Essence (Frisch et al., 2007) and PyCSP
3
(Lecoutre and Szczepanski, 2020) (which can be
used to generate XCSP
3
instances (Boussemart et al.,
2020)) for CP instances. Not all solvers support all
these representation languages, preventing the inter-
operability of these tools.
To ease the development and deployment of CP
solutions, this paper presents a suite of synergistic
tools that facilitate the integration of constraint pro-
gramming solutions across diverse software applica-
tions. The core component of our toolset is a solver
interface called Universe, which provides a unified
API for interacting with different constraint solvers
directly from the code. By offering a consistent and
intuitive interface, it is possible to seamlessly switch
between various solvers without the need for exten-
sive modifications, enabling greater flexibility and the
exploration of different solver capabilities, without
relying on a particular modelization format. This is a
very different philosophy compared to that of MiniZ-
inc or PyCSP
3
, for instance, which require to en-
code the problem in their own formats before ask-
ing a solver to read this modelization and solve it.
Universe is defined in two different popular program-
ming languages, namely C++ and Java, enabling the
use of solvers almost independently of the language in
which they have been implemented, which is not the
case of tools like, for instance, CPMpy (Guns, 2019).
The second component is a graphical remote control
system inspired by (Le Berre and Roussel, 2014) that
allows one to finely configure a chosen solver before
854
Falque, T. and Wallon, R.
A Toolset for Constraint Programming.
DOI: 10.5220/0012403700003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 854-861
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

running it on a particular instance, and even to change
its configuration on the fly for solvers that support
such updates. During the solver’s execution, the be-
haviour of the solver may be observed live, by show-
ing statistics about the decision it makes and the con-
flicts it encounters. Additionally, the search tree can
also be displayed as the solver explores it.
The rest of this paper is organized as follows. In
Section 2, we give some preliminaries regarding con-
straint programming and solving. In Section 3, we
present the Universe solver interface. In Section 4,
we give examples of the capabilities offered by our
remote control application, and in Section 5, we con-
clude and give some perspectives for future works.
2 PRELIMINARIES
In this section, we briefly describe how the dif-
ferent solvers implementing the different considered
paradigms (SAT, PB, and CP) work.
2.1 SAT Solving
A Boolean variable x is a variable that can either take
the value 0 (false) or 1 (true). We call a literal ℓ a
Boolean variable x or its negation ¯x = 1 − x. A literal
ℓ is satisfied when ℓ is assigned to 1, and falsified oth-
erwise. A clause is a disjunction of literals, requiring
at least one of its literals to be satisfied. A problem is
in Conjunctive Normal Form (CNF) when it is a con-
junction of clauses. The SATisfiability problem (SAT)
is to determine whether such a conjunction is consis-
tent. It is the first problem that has been proven to be
NP-complete (Cook, 1971).
2.2 Pseudo-Boolean (PB) Constraints
A pseudo-Boolean (PB) constraint is a constraint of
the form
∑
n
i=1
α
i
ℓ
i
△ δ, where n is a positive integer,
the weights (or coefficients) α
i
and the degree δ are
integers, ℓ
i
are literals and △∈ {<, ≤,=,≥,>}. A PB
constraint is said to be normalized when all the coef-
ficients and the degree of this constraint are positive,
and △ is ≥. Any PB constraint may be rewritten as a
conjunction of normalized PB constraints. A PB car-
dinality constraint is a normalized PB constraint in
which all the coefficients are equal to 1, and a clause
is a PB cardinality constraint with its degree equal to
1. This definition is equivalent to the definition of
clauses as disjunctions of literals, and shows that PB
solvers generalize SAT solvers.
2.3 Constraint Programming
A constraint network (CN) is composed of a set of
discrete variables and a set of constraints. Each vari-
able X takes its value in a finite set called domain of
X, denoted dom(X ). Each constraint defines a relation
on a set of variables. A solution of a CN is an as-
signment of values to all its variables such that all the
constraints of the CN are satisfied. A CN is said to be
consistent if it has at least one solution, and the cor-
responding decision problem, called Constraint Satis-
faction Problem (CSP), is to determine whether a CN
is consistent.
2.4 Solving Techniques
Let us now give a brief overview of how the solvers
of these different paradigms work. Most of them fol-
low a similar approach, which interleaves variable as-
signments (or refutations), and a constraint propaga-
tion mechanism to filter the search space. Typically,
a search tree T is built: at each internal node of T ,
(i) a pair (x,v) is selected where x is an unfixed vari-
able and v is a value in dom(x), and (ii) several cases
(branches) are considered, corresponding to either an
assignment x = v or a refutation x ̸= v. The solver
chooses the variable to assign by using a variable
selection heuristic (e.g., VSIDS (Moskewicz et al.,
2001), its PB variants (Le Berre and Wallon, 2021) or
dom/wdeg (Boussemart et al., 2004) for CP solvers).
A value selection heuristic then decides the order in
which the values are chosen when assigning variables
(this heuristic is often called phase selection in SAT or
PB solvers). After each assignment, constraint prop-
agation is applied to filter out values from the do-
main of the variables, such as unit propagation (Zhang
and Stickel, 1996) for SAT solvers, its extension to
PB constraints (Dixon and Ginsberg, 2002) or MAC
(Sabin and Freuder, 1994) for maintaining arc consis-
tency in CP solvers. Each time the solver encounters
a conflict, it can learn a new constraint, called a no-
good. This is particularly true for SAT solvers imple-
menting the CDCL architecture (Silva and Sakallah,
1996) (E
´
en and S
¨
orensson, 2004). When a conflict is
detected, it is analyzed by repeatedly applying the res-
olution proof system to infer a new clause explaining
the reason of the conflict. PB solvers also implement
a similar conflict analysis (Dixon, 2004), based on
the cutting-planes proof system (Gomory, 1958). CP
solvers also learn nogoods, but to a lesser extent than
SAT and PB solvers (Lecoutre et al., 2007). Because
there may be a huge amount of recorded nogoods,
solvers may delete them regularly, both to preserve
memory space and to avoid slowing down constraint
A Toolset for Constraint Programming
855

propagation. To this end, the solver applies a so-
called learned constraint deletion strategy to decide
which constraints to remove and when. Restart poli-
cies finally play an essential role in modern constraint
solvers, as they permit addressing the heavy-tailed
runtime distributions of SAT, PB and CSP instances
(Gomes et al., 2000). In essence, a restart policy cor-
responds to a function restart : N
+
→ N
+
, that in-
dicates the maximum number of steps allowed for the
search algorithm per attempt, called run. It means that
a backtrack search piloted by a restart policy builds a
sequence of binary search trees ⟨T
1
,T
2
,. . .⟩, where T
j
is the search tree explored at run j. Note that the cut-
off, which is the maximum number of allowed steps
during a run, may correspond to the number of back-
tracks, the number of wrong decisions (Bessiere et al.,
2004), or any other relevant measure.
3 UNIVERSE: A UNIVERSAL
SOLVER INTERFACE
There exists a large number of solvers implementing
the different paradigms presented in the previous sec-
tion. These solvers are often very efficient in practice,
but they are also somehow complementary. Indeed,
some solvers may have very good performance on
some kinds of problems, while they may be very slow
on some other problems. For instance, SAT solvers
are able to solve very efficiently a wide variety of in-
stances, but it is well-known that they perform poorly
on instances requiring the ability to “count”. This
is illustrated by the pigeonhole principle problem,
which states that it is not possible to put n pigeons
in n − 1 holes. Proving the unsatisfiability of such
problems requires an exponential number of resolu-
tion steps for SAT solvers (Haken, 1985). However,
PB solvers based on the cutting-planes proof sys-
tem (Gomory, 1958) can prove it with a linear number
of derivation steps (Hooker, 1988). Such a comple-
mentarity can also be observed between solvers im-
plementing the same paradigm while using different
strategies, see, e.g., (Le Berre et al., 2020). Identi-
fying the best solver for a particular problem may be
critical in some applications, such as those involving
human interactions: end-users may find it inaccept-
able to wait for a long time for the solution to their
problem. In order to select the best solver, one may
want to try out different ones, and thus to be able
to plug any solver in one’s application, and evaluate
its performance. However, changing the solver in-
tegrated in an application often requires a lot of ef-
fort, as solvers most of the time define their own in-
terface (when they provide one). Choosing another
solver thus implies rewriting the part of the applica-
tion invoking the functions of the solver’s API. In this
section, we present the C++ Universe interface, which
provides a common interface for the solvers of the dif-
ferent paradigms, allowing one to seamlessly switch
between different solvers. This interface may either
be natively implemented by existing solvers, or be
used in solver adapters that forward method invoca-
tions to the adapted solver’s API. We already provide
adapters for the solvers Sat4j (Le Berre and Parrain,
2010) and ACE (Lecoutre, 2023), and other ones will
be available in the near future.
3.1 An Overview of Universe
Figure 1 gives an overview of the interfaces defined
in Universe. In the following, we give a detailed de-
scription of the features they provide.
The main interface of Universe is
IUniverseSolver. It allows any solver to be invoked
to check whether a problem is consistent, and to get
a solution when it is. This interface does not depend
on the paradigm implemented by the underlying
solver: the solver is expected to read the problem
itself from the file given to loadInstance() when
this method is invoked. This interface is extended
by the IUniverseSatSolver interface to allow one
to programmatically add clauses to the solver, which
is extended by IUniversePseudoBooleanSolver
for adding PB constraints, which is itself extended
by IUniverseCspSolver for adding general CP
constraints (e.g., sum, count, etc.). These methods
allow one to dynamically build the problem to solve,
and to incrementally solve it. Note that the interface
hierarchy we described follows an is-a principle: for
instance, a CSP solver is-a SAT solver in the sense
that it is able to solve a SAT problem, while a SAT
solver is-not-a CP solver, as it does not natively
recognize CP constraints (it can only deal with
clauses). Universe also defines the abstract factory
IUniverseSolverFactory, which provides meth-
ods to create SAT, PB, and CP solvers. This factory
allows implementing solvers to be easily instantiated,
and also to provide various default configurations
that can be used as-is in user applications.
3.2 Configuring a Solver
Optionnally, the IUniverseConfigurableSolver
interface may be implemented by solvers to allow
the users to finely configure the solver according to
their needs. In particular, users can choose the vari-
able and value selection heuristics, the restart pol-
icy and the learned constraint deletion strategies the
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
856
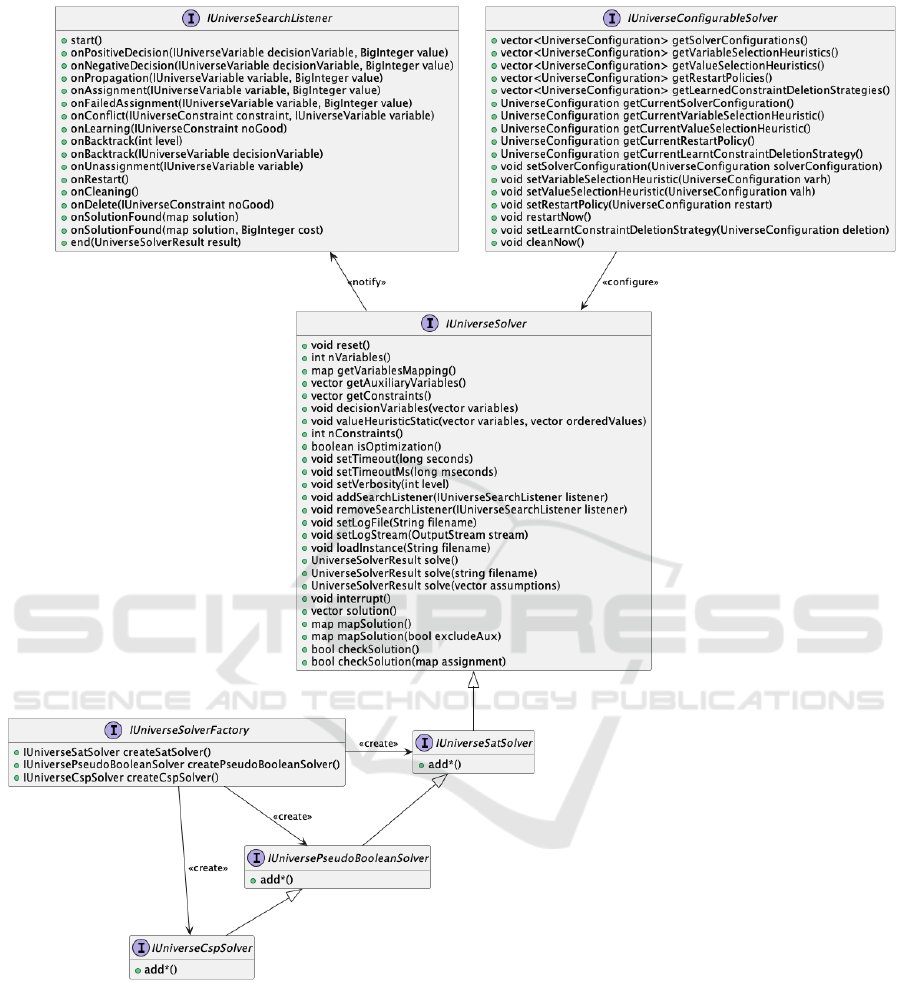
Figure 1: Class diagram of Universe.
solver will apply during its execution. To be as
generic as possible, these strategies are identified by
their names, and not by their types. Solvers im-
plementing the IUniverseConfigurableSolver are
expected to provide the list of the names of the strate-
gies they support, and to switch to the desired strategy
when asked to. Optional parameters may be speci-
fied to configure the strategies (for instance, the num-
ber of conflicts before performing the first restart).
The IUniverseConfigurableSolver also provides
method for manually performing a restart or deleting
learned constraints.
3.3 Listening to Search Events
Solvers implementing Universe may notify instances
of IUniverseSearchListener during the search, for
instance when a decision is made, a conflict is en-
A Toolset for Constraint Programming
857
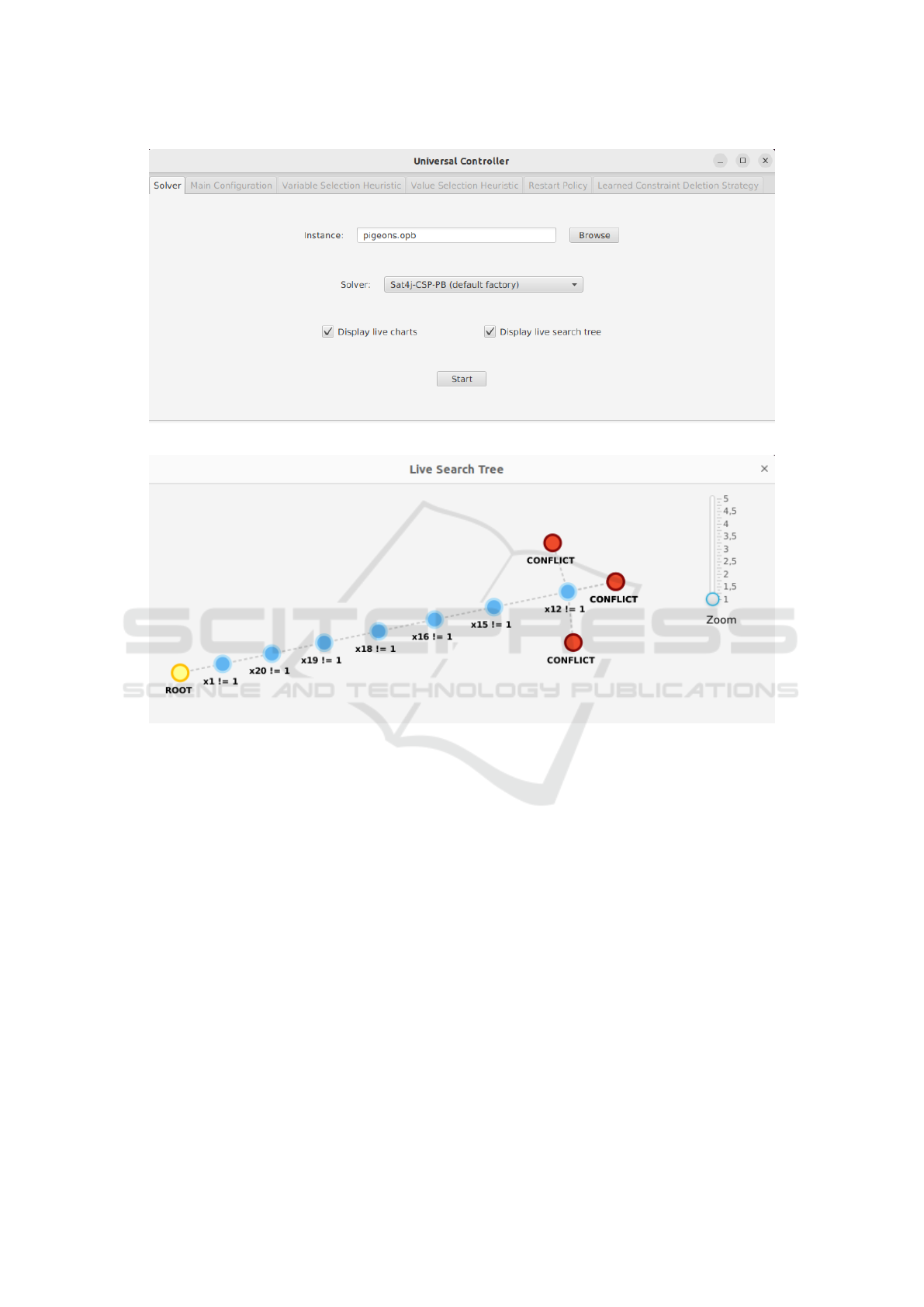
Figure 2: Main menu of the Remote Control.
Figure 3: The search tree displayed in the remote control.
countered, a constraint is learned, a restart is per-
formed, constraints are deleted or a solution is found.
Listeners may be very useful to allow one to trace the
solver execution, as well as monitor it. This interface
is for instance the basis of the remote control applica-
tion we present in Section 4.
3.4 JUniverse: Universe in Java
All the interfaces defined in Universe are also defined
in JUniverse, the Java equivalent to the Universe li-
brary. The signatures of the methods they define are
similar: they have the same name, and similar param-
eters (common classes from the Java standard library
replace those of C++, such as List which is used in-
stead of std::vector). Thanks to an integration with
Java Native Interface (JNI) in Universe, any Java
solver implementing an interface from JUniverse can
be used as a Universe solver. Said differently, devel-
opers of Java solvers do not need to provide a C++
port to their solvers: they only need to implement JU-
niverse in Java, and Universe does the rest.
4 A REMOTE CONTROL FOR
SOLVERS
SAT, PB, or CP solvers may be considered as black-
boxes for laypeople. They often provide many pa-
rameters, and understanding the impact of changing
one of them is not straightforward. On the contrary,
solver developers often know well how to interpret
the behaviour of their solver, and how to tune it to
get the best performance on a hard instance. In both
cases, monitoring the behaviour of the solver is cru-
cial. The most common approach is to regularly out-
put the solvers statistics in the console in which the
solver is run. Another approach is that implemented
in Sat4j (Le Berre and Roussel, 2014), which pro-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
858

vides a remote control to modify its configuration and
to graphically visualize the statistics of the search.
Based on the Universe interface, we present a uni-
versal remote control inspired by that of Sat4j, that
can be used to control and monitor any solver imple-
menting the Universe interface. This tool may be use-
ful for both solver developers and end-users, as it can
be used either for debugging purposes and for find-
ing the most appropriate configuration for solving a
particular problem. This tool is publicly available on
GitHub. In the following, we describe the different
features it provides.
4.1 Solver Configuration
The remote control provides a graphical interface for
configuring the solver by exploiting the methods pro-
vided by the IUniverseConfigurableSolver. The
user interface is dynamically built based on the strate-
gies that are recognized by the solver for variable and
value selection heuristics, restart policies and learned
constraint deletions (a different tab is provided for
each of these features, see Figure 2). Users can
choose the strategy they want to apply by selecting
it in a combobox, and they can then set the (optional)
parameters of the selected strategy to finely config-
ure it. The critical feature of the remote control is
that this configuration can be applied before running
the solvers, but also while it is running (of course, if
the underlying solver supports such an update). This
allows one to immediately see the impact of a strat-
egy compared to another, and thus to guide users to-
wards finding the most appropriate one to solve their
problem. In the same spirit, the remote control al-
lows one to manually trigger a restart or a learned
constraint deletion. For solvers that do not imple-
ment IUniverseConfigurableSolver, the remote
control can still be used, but the configuration tabs
are disabled. Only the solver execution and its moni-
toring are available for such solvers.
4.2 Live Statistics
As for the remote control provided by Sat4j, the
solver’s statistics are displayed live during its execu-
tion. In addition to the solver’s logs that are redirected
to the remote control window, six plots are updated at
each conflict encountered by the solver, as shown in
Figure 4:
• the size of the constraint learned by the solver af-
ter this conflict,
• the quality of the learned constraints,
• the number of negative (resp. positive) decisions
made before the conflict,
Figure 4: Dynamic plots of the Remote Control.
• the decision level at which the conflict occurred,
and
• the total number of assigned variables when the
conflict occurred.
Together, these plots provide a representation of
the solver behaviour that is more visual and inter-
pretable than their textual counterpart printed in the
logs.
4.3 Live Search Tree
The remote control also offers to display the search
tree while it is being explored by the solver. Each time
a new decision is made by the solver, a node is added
to the tree, with a label displaying the corresponding
decision. Conflicts and solutions are the leaves of the
tree, and are displayed in red and green, respectively.
An example of such a tree is given on Figure 3. This
feature should however be used with caution, and on
rather small inputs. Indeed, the search tree that is built
by the solver may be very large, and displaying it may
not be possible in the window of the remote control.
Additionally, showing the search tree live may have
an impact on the solver performance, which may be-
come very slow.
A Toolset for Constraint Programming
859

5 CONCLUSION
In this paper, we introduced the Universe interface,
which provides a universal interface for SAT, PB and
CP solvers. Universe allows one to configure a solver,
fill it with constraints, solve the associated problem
and follow its trace while it is being executed, mak-
ing it possible to seamlessly integrate various solvers
in different applications. Based on this interface,
this paper also introduced a universal remote control
for solvers, providing a graphical user interface for
performing the operations described above while the
solver is running. As perspective for future works,
we plan to develop more adapters for other popular
solvers developed by the community. We also would
like to complete the Universe ecosystem by designing
new tools, such as, e.g., a modeling system that can be
integrated into any application.
ACKNOWLEDGEMENTS
The authors would like to thank Micha
¨
el Valet, who
did a significant contribution to the remote control
presented in this paper during its internship at CRIL.
REFERENCES
Audemard, G. and Simon, L. (2018). On the glucose SAT
solver. Int. J. Artif. Intell. Tools, 27(1):1840001:1–
1840001:25.
Bessiere, C., Zanuttini, B., and Fernandez, C. (2004). Mea-
suring search trees. In Proceedings of ECAI’04 work-
shop on Modelling and Solving Problems with Con-
straints, pages 31–40.
Biere, A. and Fleury, M. (2022). Gimsatul, IsaSAT and
Kissat entering the SAT Competition 2022. In Proc. of
SAT Competition 2022 – Solver and Benchmark De-
scriptions, volume B-2022-1, pages 10–11. University
of Helsinki.
Biere, A., Heule, M., van Maaren, H., and Walsh, T., editors
(2021). Handbook of Satisfiability - Second Edition,
volume 336 of Frontiers in Artificial Intelligence and
Applications. IOS Press.
Boussemart, F., Hemery, F., Lecoutre, C., and Sais, L.
(2004). Boosting systematic search by weighting con-
straints. In Proceedings of ECAI’04, pages 146–150.
Boussemart, F., Lecoutre, C., Audemard, G., and Piette,
C. (2020). Xcsp3-core: A format for representing
constraint satisfaction/optimization problems. CoRR,
abs/2009.00514.
Cook, S. A. (1971). The Complexity of Theorem-proving
Procedures. In Proceedings of the Third Annual
ACM Symposium on Theory of Computing, STOC ’71,
pages 151–158, New York, NY, USA. ACM.
DIMACS (1993). Satisfiability: Suggested Format. DI-
MACS Challenge. DIMACS.
Dixon, H. (2004). Automating Pseudo-boolean Inference
Within a DPLL Framework. PhD thesis, Eugene, OR,
USA. AAI3153782.
Dixon, H. E. and Ginsberg, M. L. (2002). Inference meth-
ods for a pseudo-boolean satisfiability solver. In
AAAI’02, pages 635–640.
E
´
en, N. and S
¨
orensson, N. (2004). An extensible sat-solver.
In Theory and Applications of Satisfiability Testing,
pages 502–518.
Elffers, J. and Nordstr
¨
om, J. (2018). Divide and conquer:
Towards faster pseudo-boolean solving. In Proceed-
ings of IJCAI 2018, pages 1291–1299.
Frisch, A., Grum, M., Jefferson, C., Hernandez, B. M., and
Miguel, I. (2007). The design of ESSENCE: A con-
straint language for specifying combinatorial prob-
lems. In Proceedings of IJCAI’07, pages 80–87.
Gomes, C., Selman, B., Crato, N., and Kautz, H. (2000).
Heavy-tailed phenomena in satisfiability and con-
straint satisfaction problems. Journal of Automated
Reasoning, 24(1):67–100.
Gomory, R. E. (1958). Outline of an algorithm for integer
solutions to linear programs. Bulletin of the American
Mathematical Society, pages 275–278.
Guns, T. (2019). Increasing modeling language conve-
nience with a universal n-dimensional array, cppy as
python-embedded example. In Proceedings of the
18th workshop on Constraint Modelling and Reformu-
lation at CP (Modref 2019), volume 19.
Haken, A. (1985). The intractability of resolution. Theo-
retical Computer Science, 39:297 – 308. Third Con-
ference on Foundations of Software Technology and
Theoretical Computer Science.
Hooker, J. N. (1988). Generalized resolution and cutting
planes. Annals of Operations Research, 12(1):217–
239.
Le Berre, D., Marquis, P., and Wallon, R. (2020). On weak-
ening strategies for PB solvers. In Pulina, L. and Seidl,
M., editors, SAT 2020, pages 322–331. Springer.
Le Berre, D. and Parrain, A. (2010). The SAT4J library,
Release 2.2, System Description. Journal on Satisfia-
bility, Boolean Modeling and Computation, 7:59–64.
Le Berre, D. and Roussel, S. (2014). Sat4j 2.3.2: on the
fly solver configuration, System Description. Journal
on Satisfiability, Boolean Modeling and Computation
(JSAT), 8:197–202.
Le Berre, D. and Wallon, R. (2021). On dedicated cdcl
strategies for pb solvers. In Proceedings of SAT 2021,
pages 315–331.
Lecoutre, C. (2009). Constraint Networks: Techniques and
Algorithms. ISTE/Wiley.
Lecoutre, C. (2023). Ace, a generic constraint solver.
CoRR, abs/2302.05405.
Lecoutre, C., Sais, L., Tabary, S., and Vidal, V. (2007).
Recording and minimizing nogoods from restarts. J.
Satisf. Boolean Model. Comput., 1(3-4):147–167.
Lecoutre, C. and Szczepanski, N. (2020). PYCSP3: mod-
eling combinatorial constrained problems in python.
CoRR, abs/2009.00326.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
860

Moskewicz, M. W., Madigan, C. F., Zhao, Y., Zhang, L.,
and Malik, S. (2001). Chaff: Engineering an Efficient
SAT Solver. In Proceedings of the 38th Annual De-
sign Automation Conference, DAC ’01, pages 530–
535, New York, NY, USA. ACM.
Narendra Jussien, Guillaume Rochart, X. L. (2008). Choco:
an open source java constraint programming library.
In Conference on the Integration of Constraint Pro-
gramming, Artificial Intelligence, and Operations Re-
search.
Nethercote, N., Stuckey, P., Becket, R., Brand, S., Duck, G.,
and Tack, G. (2007). MiniZinc: Towards a Standard
CP Modelling Language. In Proceedings of CP’07,
pages 529–543.
Rossi, F., Beek, P. V., and Walsh, T. (2006). Handbook of
Constraint Programming. Elsevier.
Roussel, O. and Manquinho, V. M. (2021). Pseudo-boolean
and cardinality constraints. In Biere, A., Heule, M.,
van Maaren, H., and Walsh, T., editors, Handbook of
Satisfiability - Second Edition, volume 336 of Fron-
tiers in Artificial Intelligence and Applications, pages
1087–1129. IOS Press.
Sabin, D. and Freuder, E. (1994). Contradicting conven-
tional wisdom in constraint satisfaction. In Proceed-
ings of CP’94, pages 10–20.
Silva, J. a. P. M. and Sakallah, K. A. (1996). GRASP – New
Search Algorithm for Satisfiability. In Proceedings
of the 1996 IEEE/ACM International Conference on
Computer-aided Design, ICCAD ’96, pages 220–227,
Washington, DC, USA. IEEE Computer Society.
Stuckey, P., Becket, R., and Fischer, J. (2010). Philosophy
of the MiniZinc challenge. Constraints, 15(3):307–
316.
van Hentenryck, P. (1999). The OPL Optimization Pro-
gramming Language. The MIT Press.
Zhang, H. and Stickel, M. E. (1996). An efficient algo-
rithm for unit propagation. In In Proceedings of the
Fourth International Symposium on Artificial Intelli-
gence and Mathematics (AI-MATH’96), Fort Laud-
erdale (Florida USA, pages 166–169.
Zhou, N., Kjellerstrand, H., and Fruhman, J. (2015). Con-
straint Solving and Planning with Picat. Springer
Briefs in Intelligent Systems. Springer.
A Toolset for Constraint Programming
861
