
SWViT-RRDB: Shifted Window Vision Transformer Integrating
Residual in Residual Dense Block for Remote Sensing Super-Resolution
Mohamed Ramzy Ibrahim
1,2 a
, Robert Benavente
2 b
, Daniel Ponsa
2 c
and Felipe Lumbreras
2 d
1
Computer Engineering Department, Arab Academy for Science, Technology and Maritime Transport, Alexandria, Egypt
2
Computer Vision Center & Computer Science Department, Universitat Aut
`
onoma de Barcelona, Barcelona, Spain
Keywords:
Computer Vision, Super-Resolution, Remote Sensing, Deep Learning.
Abstract:
Remote sensing applications, impacted by acquisition season and sensor variety, require high-resolution im-
ages. Transformer-based models improve satellite image super-resolution but are less effective than con-
volutional neural networks (CNNs) at extracting local details, crucial for image clarity. This paper intro-
duces SWViT-RRDB, a new deep learning model for satellite imagery super-resolution. The SWViT-RRDB,
combining transformer with convolution and attention blocks, overcomes the limitations of existing models
by better representing small objects in satellite images. In this model, a pipeline of residual fusion group
(RFG) blocks is used to combine the multi-headed self-attention (MSA) with residual in residual dense block
(RRDB). This combines global and local image data for better super-resolution. Additionally, an overlapping
cross-attention block (OCAB) is used to enhance fusion and allow interaction between neighboring pixels to
maintain long-range pixel dependencies across the image. The SWViT-RRDB model and its larger variants
outperform state-of-the-art (SoTA) models on two different satellite datasets in terms of PSNR and SSIM.
1 INTRODUCTION
Satellite images are key for different tasks like agri-
culture and weather forecasting, with more data
coming from missions like Landsat-8 and Sentinel-
2 (Wang et al., 2022a). However, getting high-
resolution (HR) images is expensive and slow, es-
pecially for smaller satellite missions. A solution
involves capturing low-resolution (LR) images in
space and applying super-resolution (SR) methods on
Earth to obtain HR images. Moreover, satellite im-
ages are particularly challenging due to their bird’s-
eye perspective (leading to the loss of small object
details and textures), atmospheric conditions (haze,
clouds, rain, etc.), variations in spectral and spa-
tial resolution from different sensors, and wide ge-
ographic coverage (Ibrahim et al., 2022). Over the
past few years, research in remote sensing SR has
primarily focused on convolutional neural networks
(CNNs) (Dong et al., 2016; Wang et al., 2022b).
However, CNN architectures face two key issues:
a
https://orcid.org/0000-0002-7483-4468
b
https://orcid.org/0000-0001-9819-4445
c
https://orcid.org/0000-0002-7330-6524
d
https://orcid.org/0000-0003-2887-8053
first, their content-independent convolution kernels
face challenges in recovering different image regions;
second, their fixed-size convolutions limit long-range
dependency modeling in images (Liang et al., 2021).
Recently, vision transformers have addressed some
of these concerns by capturing global interactions
using self-attention mechanisms (Dosovitskiy et al.,
2021). However, vision transformers also have some
drawbacks that come from dividing images into fixed
patch sizes. First, border pixels cannot share infor-
mation with neighboring patches. Second, super-
resolved patches may have border artifacts that af-
fect the final full-sized super-resolved image (Chen
et al., 2023). Different modified vision transformer
approaches (Liang et al., 2021; Liu et al., 2021) at-
tempted to address the issues. However, the proposed
solutions do not utilize more input pixels than CNNs,
leading to some information loss (Liang et al., 2021).
The recent HAT model (Chen et al., 2023) combines
Swin transformer (Liang et al., 2021; Liu et al., 2021)
modules and attention techniques to enhance feature
representation. However, it falls short in remote sens-
ing SR, particularly for small details in satellite bird’s-
eye LR images due to the lack of dense feature rep-
resentation. Conversely, residual in residual dense
blocks (RRDB) (Wang et al., 2019; Ibrahim et al.,
Ibrahim, M., Benavente, R., Ponsa, D. and Lumbreras, F.
SWViT-RRDB: Shifted Window Vision Transformer Integrating Residual in Residual Dense Block for Remote Sensing Super-Resolution.
DOI: 10.5220/0012399300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
575-582
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
575

2022) excel in finer details representation in LR im-
ages due to their generation of extensive features.
This paper proposes a new SWViT-RRDB model
for satellite imagery SR, inspired by the HAT (Chen
et al., 2023). It combines a multi-headed self-
attention (MSA) module for global information with a
deep CNN (RRDB) to extract detailed local informa-
tion and prevent gradient loss during training. This
fusion addresses the information loss seen in models
based solely on CNNs or transformers. The model
also includes an overlapping cross-attention window
(OCAB) to enable cross-window interaction. The
model is evaluated on two datasets: real-captured LR-
HR image pairs from different satellites and a dataset
with generated HR images from pan-sharpened LR
images. These diverse datasets cover variations in
geographical conditions, acquisition seasons, sensor
types, and resolutions.
The paper contribution can be summarized as: 1)
A new SWViT-RRDB model for remote sensing satel-
lite imagery SR is presented that focuses on exploit-
ing more information from LR images for finer de-
tail enhancement. 2) Fusing global MSA module fea-
tures with extensive local RRDB features and pre-
venting gradient loss. 3) Model adaptation to diverse
datasets, including real-captured or synthesized HR
pan-sharpened with varying scaling factors.
2 RELATED WORK
2.1 CNN-Based Models
Dong et al. (Dong et al., 2014) introduced SRCNN,
the first SR network with three convolutional layers.
Also, they proposed VDSR (Dong et al., 2016), a very
deep super-resolution approach with 20 convolutional
layers for enhanced image reconstruction. Tuna et
al. (Tuna et al., 2018) compared SRCNN and VDSR
models on satellite images, favoring VDSR for both
panchromatic and multi-spectral images. Some stud-
ies use residual blocks (Zhang and et al., 2018; Zhang
et al., 2021) to overcome the vanishing gradient prob-
lem. Other studies focus on dense blocks (Jiang et al.,
2018; Zhang and et al., 2018) to stack a large number
of features for improved image representation and re-
construction. More recent studies proposed attention
mechanisms (Zhang et al., 2018; Woo et al., 2018)
to enhance image reconstruction. Wang et al. (Wang
et al., 2022b) introduced a lightweight lattice block
with channel separation, attention module, and fea-
ture enhancement block to improve texture extrac-
tion capability for better satellite imagery reconstruc-
tion. After the development of GANs in SR, some
studies employed Generative Adversarial Networks
(GANs) to reduce perceptual loss and enhance super-
resolved images (Ledig and et al., 2017; Wang et al.,
2019). Lanaras et al. (Lanaras et al., 2018) proposed
an improved ESRGAN, based on (Wang et al., 2019),
trained with multi-spectral satellite image pairs.
2.2 Transformer-Based Models
Recently, after the success of transformers in natural
language processing (Aleissaee et al., 2022). Trans-
formers have been employed in various high-level
computer vision tasks like classification, segmenta-
tion, and object detection (Dosovitskiy et al., 2021;
Liu et al., 2021; Zhang et al., 2022). They have also
been applied to low-level tasks like image restoration
and SR. Chen et al. (Chen et al., 2021) introduced
the image processing transformer (IPT) for restora-
tion, requiring extensive parameters, large datasets,
and multi-task learning, but its focus on small image
patches could potentially limit their effectiveness in
image restoration. Liang et al. (Liang et al., 2021)
introduced SwinIR for single-image super-resolution
(SISR), incorporating a shifted window mechanism
for efficient self-attention computation and enabling
information sharing between border pixels of neigh-
boring patches. While transformers focus on global
interactions, studies suggest that adding convolutions
to transformer-based networks enhances visual rep-
resentation (Xiao et al., 2021). Chen et al. (Chen
et al., 2023) introduced a hybrid attention transformer
(HAT) for feature attention with CAB and OCAB to
enhance pixel information exploration and feature fu-
sion. He et al. (He et al., 2022) proposed a dense
spectral transformer with ResNet for multispectral re-
mote sensing images, facilitating long-range relation-
ship learning within the data.
3 METHODS
The proposed SWViT-RRDB model pipeline, in-
spired by HAT (Chen et al., 2023), combines the
Swin transformer MSA (Liang et al., 2021) modules,
RRDB (Ibrahim et al., 2022) (a dense CNN with mul-
tiple residuals), and OCAB (Chen et al., 2023) mod-
ules to complement each other.
The SWViT-RRDB introduces a new residual in
residual transformer fusion block (RRTFB) that fuses
local (RRDB) and global (MSA) features, enhancing
the representation of small and detailed objects. The
RRDB module enhances local details, particularly in
satellite images, by generating dense local informa-
tion, and its mix of local and global residuals pre-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
576
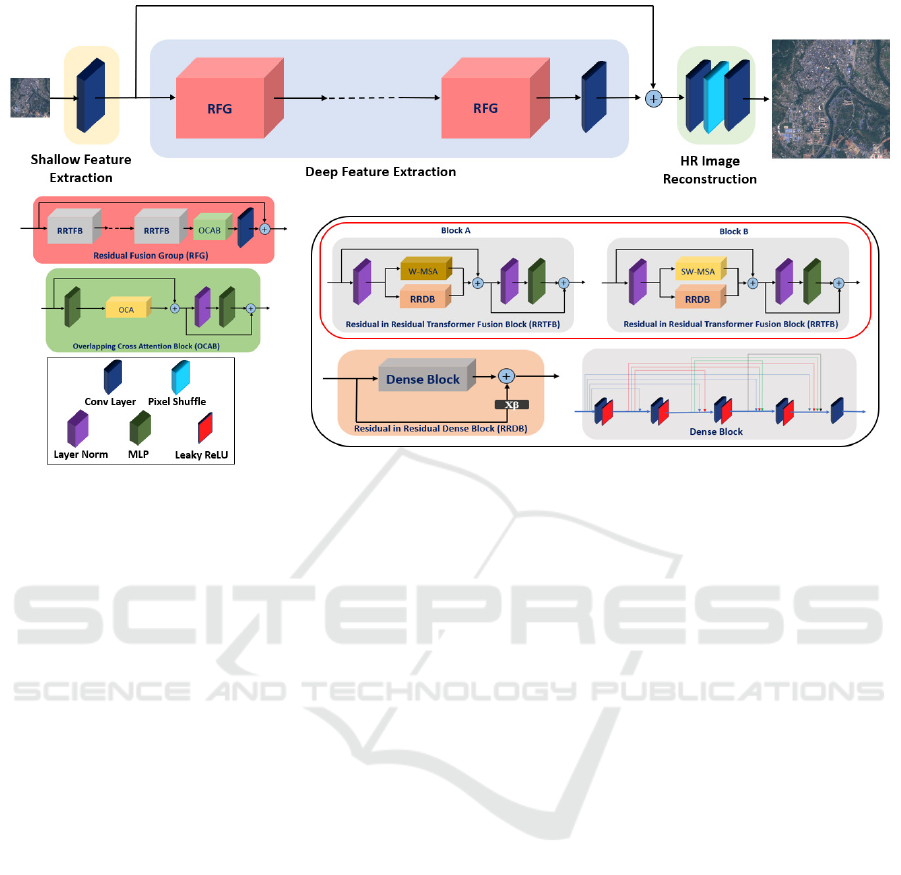
Figure 1: SWViT-RRDB model architecture, with key enhancements highlighted in black and red squares.
vents vanishing gradients. The MSA modules, al-
ternating between a regular window multi-head self-
attention (W-MSA) and a shifted window multi-head
self-attention (SW-MSA), extract global information
to address convolution kernel locality issues and sup-
port long-range dependencies.
3.1 Overall Model Architecture
The SWViT-RRDB model contains three phases:
shallow feature extraction, deep feature extraction,
and HR picture reconstruction (see Fig 1).
In the shallow feature extraction phase, shallow
features F
S
are extracted from each LR image of size
H ×W ×C
in
where H, W, and C
in
are the height, the
width, and the number of channels in the image, us-
ing a 3×3 convolution layer (CONV ). These shallow
features are then fed to a deep feature extraction phase
P
DFE
. The P
DFE
phase consists of N residual fusion
groups (RFG) followed by a CONV . RFGs are con-
nected sequentially, with each subsequent block tak-
ing the output of the previous one as its input. The
output, F
D
, is obtained by fusing the initial feature F
S
with the output of the CONV after the last RFG block
using a skip residual connection, preserving image in-
formation and preventing any loss during training. In
the HR image reconstruction phase (P
REC
), F
D
fea-
tures are upscaled with a pixel-shuffle module using
sub-pixel convolution, trained for each feature map to
enhance LR image upscaling, instead of a traditional
bicubic filter (Shi et al., 2016). The upscaled features
are then convolved to reconstruct the HR image.
The RFG serves as the primary component in our
proposed model, emphasizing deep feature extraction.
As illustrated in Fig. 1, the RFG comprises K in-
stances of the RRTFB. The RRTFBs are arranged se-
quentially, with each subsequent block taking the out-
put of the previous one as its input. The last RRTFB is
succeeded by OCAB (Chen et al., 2023) and CONV .
Additionally, the input to each RFG is combined with
the output of CONV using a skip residual connection,
facilitating the aggregation of different feature levels
for stable training and to prevent any gradient loss.
3.2 Residual in Residual Transformer
Fusion Block (RRTFB)
A newly proposed RRTFB combines the global
features inside image patches that are extracted from
MSA and the local features inside image patches that
are extracted from RRDB to enhance the image rep-
resentation for the SR task. Moreover, the alternating
MSA modules support long-range dependencies
across the image. As shown in Fig. 1, RRTFB is
composed of two parts. The first part consists of
an input fed to a LayerNorm (LN) followed by two
parallel branches having RRDB, and either a W-MSA
or a SW-MSA (Liang et al., 2021) as presented in
Block A and Block B in Fig. 1, respectively. The
SW-MSA is used because in W-MSA the local win-
dow is fixed across different layers introducing a no
connection across local windows of MSA. To address
SWViT-RRDB: Shifted Window Vision Transformer Integrating Residual in Residual Dense Block for Remote Sensing Super-Resolution
577

this, both MSA blocks (W-MSA and SW-MSA)
are used interchangeably to enable cross-window
connections (Liu et al., 2021). In SW-MSA, features
are shifted by [
M
2
,
M
2
] pixels before partitioning (M
is the window size). Additionally, a skip residual
connection combines the output with the input of
the RRTFB. The second part consists of the output
of the first part, which is fed to a LN and followed
by a multi-layer perceptron (MLP) with four fully
connected layers with a non-linear GeLU activating
function to add more feature transformation. The
output of the second part is added to the output of the
first part by a skip residual connection.
Residual in Residual Dense Block (RRDB). RRDB
extracts extensive, detailed local features from LR im-
ages using dense blocks, merging them with shallow
frequencies via a global residual connection, which is
important for representing small objects. This repre-
sentation is needed, especially in satellite images SR
for better earth observation. As shown in Fig. 1, the
input X
LN
is fed to RRDB, which consists of a dense
block with a global residual connection. The global
residual connection is multiplied by a residual scaling
factor (β) to stabilize the results during training. Af-
ter that, it is added to the output of the dense block to
avoid gradient losses (Ibrahim et al., 2022).
The dense block consists of four CONV with
a ReLU activation function and ends with a fifth
CONV . It consists of multiple local residual connec-
tions, and all the preceding generated feature maps,
x
0
, x
1
, ...., x
l−1
, are sent to the l
th
layer. The residual
scaling factor (β) is chosen to be equal to 0.2 as dif-
ferent values were tested in (Ibrahim et al., 2022) and
the best result was achieved with this value. Its fusion
with global and local residual connections prevents
gradient losses in dense blocks and stabilizes training.
3.3 Overlapping Cross-Attention Block
(OCAB)
The OCAB module (Chen et al., 2023) (presented
in Fig. 1) is used to establish cross-window connec-
tions. The OCAB module is similar to the basic Swin
transformer module (Liang et al., 2021), except that
it replaces MSA with an overlapping cross-attention
layer (OCA), which uses different window sizes with
overlapping from MSA to partition the generated fea-
tures. It addresses convolution challenges by enhanc-
ing long dependency representation in window self-
attention.
4 EXPERIMENTAL SETTINGS
In this section, we detail the datasets, the training set-
tings, and the performance metrics used.
4.1 Datasets Description
The evaluation of the proposed model is done on two
satellite image datasets, namely OLI2MSI (Wang
et al., 2021) and Alsat2B (Djerida et al., 2021).
OLI2MSI Dataset. It is a real-world remote sensing
satellite imagery dataset containing LR-HR pairs of
images from two different satellites (Landsat8-OLI
and Sentinel2-MSI). It consists of 5225 image pairs
for training and 100 pairs for testing. The LR input
comprises Landsat8-OLI images with a 30-meter
spatial resolution, and the HR ground truth consists
of Sentinel2-MSI images with a 10-meter spatial
resolution which results in a scale factor of 3 in SR.
Alsat Dataset. It is generated from Alsat-2B satel-
lite. The LR images are captured from a satellite
with a 10-meter spatial resolution, and the HR im-
ages are generated by pan-sharpening the LR images.
Pan-sharpening is a widely recognized technique that
enhances the spatial resolution of satellite imagery by
combining information from both the PAN (2.5-meter
spatial resolution) and multi-spectral bands (10-meter
spatial resolution). The dataset contains 2182 training
samples and three subsets for testing: ”Agriculture”,
”Urban”, and ”Special structures
1
”, with 56, 282, and
239 image pairs, respectively, and a scale factor of 4.
4.2 Training Settings
Our SWViT-RRDB, developed in Python and Py-
Torch, is tested on 3.80 GHz Core i7, 32 GB RAM,
and 24 GB RTX 3090 systems. Training involves
cropping LR and HR images into 64 × 64 and 192 ×
192 patches, respectively, with augmentation via flips
and rotations. We train models using 16-image
batches, Adam optimizer, and cosine annealing learn-
ing rate for 800K iterations, ensuring identical train-
ing conditions across datasets for fairness.
SWViT-RRDB (baseline) comprises 6 RFG
blocks, 6 RRTFB, 6 MSA modules, 1 OCAB module
with 6 OCA blocks, and W-MSA/SW-MSA modules
with a window size of 8. We tested its variants
to evaluate the impact of different RFG numbers:
SWViT-RRDB-S (3 RFGs), SWViT-RRDB-M (9
RFGs), and SWViT-RRDB-L (12 RFGs).
1
Contain constructions such as airports, stadiums, etc.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
578

Loss Function. SWViT-RRDB is optimized using
the L
1
loss function (L
1
=∥ I
SR
− I
HR
∥), minimizing
the difference between the super-resolved image (I
SR
)
and the ground truth HR image (I
HR
).
Performance Metrics. We use peak signal-to-noise
ratio (PSNR) and structural similarity index (SSIM)
for quantitative model evaluation (Ibrahim et al.,
2024). These measures compare super-resolved im-
ages to ground-truth HR images for fidelity. For qual-
itative evaluation, we generate quality maps by mea-
suring the Euclidean distance between corresponding
pixels in high-resolution and super-resolved images,
normalizing the results to a 0-255 scale.
5 RESULTS AND DISCUSSION
We conduct ablation studies on SWViT-RRDB mod-
ules and compare SWViT-RRDB and its variants
against SoTA.
5.1 Ablation Study
Effect of OCAB and RRDB on SWViT-RRDB.
We studied the impact of OCAB and RRDB on
SWViT-RRDB using both datasets, OLI2MSI and
Alsat. The best results, shown in Table 1, came
from combining OCAB and RRDB, increasing
PSNR by 0.38 dB for OLI2MSI and 0.21 dB for
Alsat, compared to SWViT-RRDB without these
modules. The OCAB module enables cross-window
connections, complementing the fusion of extensive
local RRDB features and global MSA features. This
could potentially explain the improved representation
of small objects in satellite images needed for better
image SR. The results show that adding either OCAB
or RRDB to the model improves it compared to
just using MSA modules. The OCAB module is
especially effective, slightly better than just using
RRDB. This emphasizes the need for OCAB and
MSA modules to work with RRDB for better image
reconstruction.
Effect of Changing the Number of RFGs. Exper-
iments were performed to study how changing the
number of RFG blocks affects the SWViT-RRDB
model(6 RFGs) and its variants: SWViT-RRDB-S
(3 RFGs), SWViT-RRDB-M (9 RFGs), and SWViT-
RRDB-L (12 RFGs). Table 2 shows the quantita-
tive results (PSNR and SSIM) obtained. As a gen-
eral trend, we can see that the results improve as the
number of RFG blocks increases. Increasing RFGs
from 3 to 6 significantly improves PSNR by 0.25 dB
Table 1: Study on adding (✓) or removing (✗) OCAB and
RRDB modules in SWViT-RRDB.
Dataset Module SWViT-RRDB Model
OCAB ✗ ✗ ✓ ✓
RRDB ✗ ✓ ✗ ✓
OLI2MSI
PSNR 37.98 38.23 38.27 38.36
SSIM 0.9492 0.9523 0.9529 0.9533
Alsat
PSNR 17.33 17.43 17.50 17.54
SSIM 0.2934 0.3358 0.3566 0.3582
Table 2: Study on modifying the number of RFGs (N) in
our SWViT-RRDB.
Dataset Metric
No. of RFG blocks in SWViT-RRDB
N=3 N=6 N=9 N=12
OLI2MSI
PSNR 38.11 38.36 38.41 38.48
SSIM 0.9504 0.9533 0.9542 0.9557
Alsat
PSNR 17.46 17.54 17.58 17.63
SSIM 0.3562 0.3582 0.3620 0.3649
in OLI2MSI and 0.08 dB in Alsat datasets. Increasing
RFG blocks from 6 to 9 and then to 12 leads to near-
linear PSNR improvements: 0.05 dB and 0.07 dB in
OLI2MSI, and 0.04 dB and 0.05 dB in Alsat, respec-
tively. From these results, we conclude that increasing
RFG blocks from 3 to 6 leads to a PSNR improvement
more than twice the sum of PSNR improvements re-
sulting from increasing RFG blocks from 6 to 9 and
9 to 12 in OLI2MSI (real-captured dataset). While
in Alsat (simulated dataset), increasing RFG blocks
from 3 to 6 leads to a PSNR improvement that nearly
equals the sum of PSNR improvements resulting from
increasing RFG blocks from 6 to 9 and 9 to 12.
5.2 Comparison with SoTA
Quantitative Results. Our proposed model (SWViT-
RRDB) and its larger variants are evaluated against
various DL SoTA models. The models included in
experiments corresponds to the best SoTA results in
the last decade. It includes methods from several
approaches such as: bicubic (baseline method),
CNN-based models (SRCNN (Dong et al., 2016),
VDSR (Kim et al., 2016), SRResNet (Ledig and
et al., 2017), EDSR (Lim et al., 2017), and 2DRRDB
(Ibrahim et al., 2022)), GAN-based models (ESR-
GAN (Wang et al., 2019), and cDRSRGAN (Wang
et al., 2021)), models utilizing channel attention
blocks (CAB) such as RCAN (Zhang et al., 2018),
transformers such as SwinIR and SwinIR+ (Liang
et al., 2021), and a fusion of transformers and
SWViT-RRDB: Shifted Window Vision Transformer Integrating Residual in Residual Dense Block for Remote Sensing Super-Resolution
579
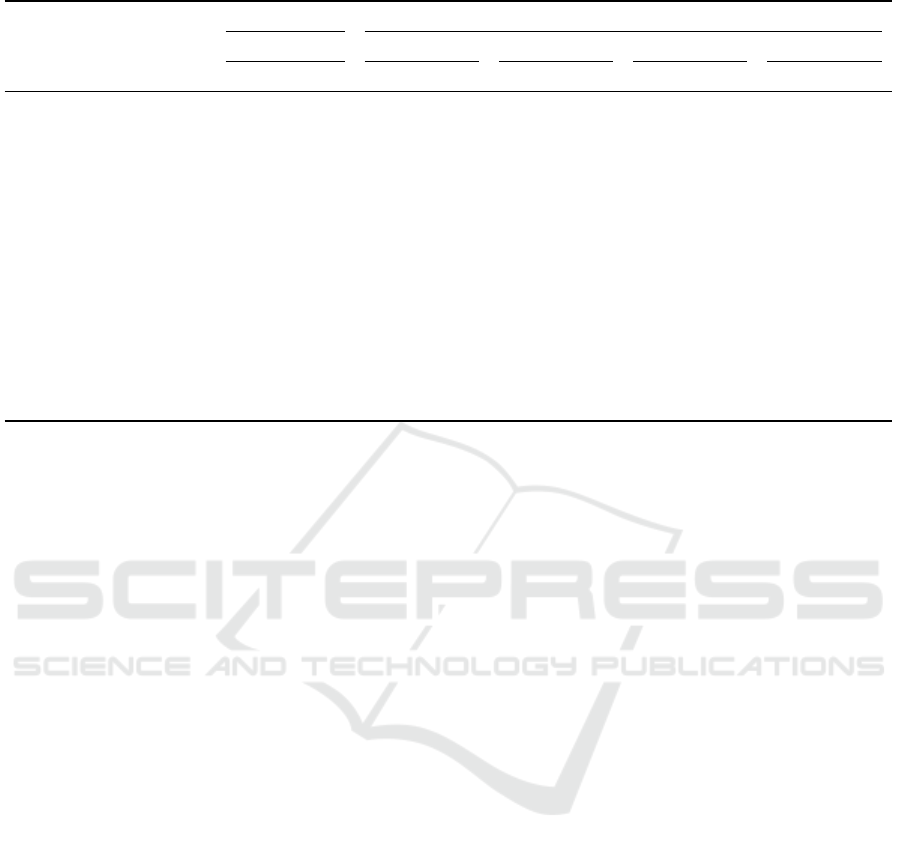
Table 3: Quantitative results (PSNR(dB) / SSIM) comparison with SoTA models.
Method
OLI2MSI (×3) Alsat (×4)
ALL ALL Agriculture Urban Special
PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM
Bicubic 33.24 0.879 14.30 0.260 14.68 0.342 13.41 0.213 14.98 0.283
ESRGAN 33.82 0.888 15.97 0.268 17.61 0.372 14.89 0.213 16.57 0.294
SRCNN 35.26 0.907 15.99 0.270 17.68 0.377 14.88 0.217 16.59 0.293
VDSR 35.87 0.919 16.02 0.272 17.79 0.383 14.85 0.218 16.67 0.296
SRResNet 37.13 0.939 16.06 0.272 17.82 0.387 14.90 0.219 16.71 0.295
EDSR 37.68 0.946 16.12 0.274 17.83 0.387 14.93 0.218 16.79 0.298
cDRSRGAN 37.71 0.947 16.31 0.269 17.94 0.388 15.23 0.217 16.91 0.290
RCAN 37.85 0.947 16.78 0.276 18.62 0.391 15.82 0.221 17.23 0.299
2DRRDB 37.89 0.948 16.86 0.282 18.78 0.390 15.89 0.223 17.31 0.311
SwinIR 37.98 0.949 17.33 0.293 18.96 0.392 16.29 0.226 17.88 0.330
SwinIR+ 38.08 0.951 17.36 0.310 19.01 0.416 16.33 0.249 17.91 0.341
HAT 38.21 0.952 17.43 0.340 19.03 0.427 16.42 0.274 17.97 0.378
HAT-L 38.29 0.953 17.48 0.352 19.03 0.432 16.44 0.299 18.06 0.382
SWViT-RRDB (ours) 38.36 0.953 17.54 0.358 19.12 0.440 16.52 0.309 18.10 0.384
SWViT-RRDB-M (ours) 38.41 0.954 17.58 0.362 19.16 0.447 16.56 0.316 18.12 0.384
SWViT-RRDB-L (ours) 38.48 0.956 17.63 0.365 19.17 0.451 16.61 0.321 18.17 0.385
CABs such as HAT and HAT-L (Chen et al., 2023).
As seen in Table 3, our proposed SWViT-RRDB
variants (SWViT-RRDB, SWViT-RRDB-M, and
SWViT-RRDB-L), combining transformers and
CNNs, achieve superior results compared to the
latest SoTA models using CNNs, CABs, GANs,
transformers, or a fusion of transformers and CABs.
They scored the highest results in terms of PSNR and
SSIM in both datasets, OLI2MSI and Alsat. Similary,
for Alsat dataset classes, the baseline SWViT-RRDB
achieves the highest PSNR and SSIM in each class
(Agriculture, Urban, and Special structure) compared
to SoTA models. Among the SWViT-RRDB variants,
SWViT-RRDB-L, with 12 RFGs, achieves the highest
PSNR and SSIM on OLI2MSI and Alsat datasets.
From Table 3, first, our model (SWViT-RRDB)
and its larger variants outperform CNN-based,
GANs-based, and CAB-based methods due to their
ability to capture long dependencies and process
information more comprehensively. Second, they
do better than modern transformer-based methods,
which cannot generate local information due to
the absence of convolutions or share information
between neighboring pixels in different fixed-sized
patches. Additionally, the transformer-based methods
address the issue of border artifacts that can affect
the generated super-resolved full image. Finally, they
surpass the fusion of transformers and CABs (HAT
and HAT-L) due to the potential lack of extensive
local features generated by deep CNNs. Our model
(SWViT-RRDB) and its larger variants propose using
the RRDB CNN module, which generates extensive
local features and fuses local and global residual
connections inside it to avoid the vanishing gradient
problem, which enables better representation of small
objects in satellite images.
Qualitative Results. Fig. 3(A) visually compares
our models (SWViT-RRDB-L,SWViT-RRDB-M, and
baseline) with SoTA (bicubic, SwinIR, SwinIR+,
HAT, HAT-L) on OLI2MSI dataset. Our models show
sharper, clearer edges and lines with less haze than
the others. Moreover, Fig. 3(B) reveals that SWViT-
RRDB-L and SWViT-RRDB have darker quality
maps than other models (bicubic, SwinIR+, HAT-
L), indicating fewer errors, particularly compared to
SwinIR+, which shows lighter, error-prone areas.
6 CONCLUSIONS
In conclusion, our proposed SWViT-RRDB model
addresses the limitations of prior SR models in satel-
lite imagery. Building on the previous work that com-
bines CNN and transformers, our pipeline involves
shallow feature extraction, deep feature extraction via
RFG blocks, and HR image reconstruction. Exper-
iments and ablation studies reveal that our SWViT-
RRDB model, along with its larger variants, SWViT-
RRDB-M and SWViT-RRDB-L, surpass SoTA mod-
els in PSNR and SSIM. The fusion of global MSA
features, local RRDB features, and the OCAB mod-
ule shows improvement in image reconstruction com-
pared to SoTA models. Extensive local features of
the RRDB module and combined global-local resid-
ual connections enhance small object representation
in satellite images and prevent vanishing gradients
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
580
Figure 2: Qualitative results on OLI2MSI dataset (A) Visual comparison between bicubic, SwinIR, SwinIR+, HAT, HAT-L,
SWViT-RRDB, SWViT-RRDB-M, and SWViT-RRDB-L on a selected part (red square) inside the image. (B) Quality map
comparsion between bicubic, SwinIR+, HAT-L, SWViT-RRDB, SWViT-RRDB-L on the full image.
during training. Moreover, the alternating MSA mod-
ules (W-MSA and SW-MSA) and OCAB module
highlight the value of cross-window connections for
long-range dependencies, complementing the RRDB
for improved image reconstruction. Our SWViT-
RRDB model surpasses SoTA on two diverse satellite
datasets: OLI2MSI (real, ×3 scale) and Alsat (syn-
thetic HR from pan-sharpened LR, ×4 scale), prov-
ing effectiveness across different scales and satellites.
Future work will extend SWViT-RRDB to different
domains and smaller scales (×8 and ×16).
ACKNOWLEDGEMENTS
This work is partially supported by
Grant PID2021-128945NB-I00 funded by
MCIN/AEI/10.13039/501100011033 and by “ERDF
A way of making Europe”. The authors acknowledge
the support of the Generalitat de Catalunya CERCA
Program to CVC’s general activities, and the Depar-
tament de Recerca i Universitats from the Generalitat
de Catalunya with reference 2021SGR01499.
REFERENCES
Aleissaee, A. A., Kumar, A., Anwer, R. M., Khan, S.,
Cholakkal, H., Xia, G.-S., and khan, F. S. (2022).
Transformers in Remote Sensing: A Survey. arXiv
preprint arXiv:2209.01206.
Chen, H., Wang, Y., Guo, T., Xu, C., Deng, Y., Liu, Z., Ma,
S., Xu, C., Xu, C., and Gao, W. (2021). Pre-Trained
Image Processing Transformer. In 2021 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 12294–12305.
Chen, X., Wang, X., Zhou, J., Qiao, Y., and Dong, C.
(2023). Activating More Pixels in Image Super-
Resolution Transformer. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 22367–22377.
Djerida, A., Djerriri, K., Karoui, M. S., and El Amin larabi,
M. (2021). A New Public Alsat-2B Dataset for Single-
Image Super-Resolution. In 2021 IEEE International
Geoscience and Remote Sensing Symposium IGARSS,
pages 8095–8098. ISSN: 2153-7003.
Dong, C., Loy, C. C., He, K., and Tang, X. (2014). Learn-
ing a Deep Convolutional Network for Image Super-
Resolution. In Fleet, D., Pajdla, T., Schiele, B.,
and Tuytelaars, T., editors, Computer Vision – ECCV
2014, volume 8692, pages 184–199. Springer Interna-
tional Publishing, Cham.
Dong, C., Loy, C. C., He, K., and Tang, X. (2016). Im-
age Super-Resolution Using Deep Convolutional Net-
SWViT-RRDB: Shifted Window Vision Transformer Integrating Residual in Residual Dense Block for Remote Sensing Super-Resolution
581

works. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 38(2):295–307.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2021). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. In International Conference on Learning
Representations.
He, J., Yuan, Q., Li, J., Xiao, Y., Liu, X., and Zou, Y.
(2022). DsTer: A dense spectral transformer for re-
mote sensing spectral super-resolution. International
Journal of Applied Earth Observation and Geoinfor-
mation, 109:102773.
Ibrahim, M. R., Benavente, R., Lumbreras, F., and Ponsa,
D. (2022). 3DRRDB: Super Resolution of Multiple
Remote Sensing Images using 3D Residual in Resid-
ual Dense Blocks. In 2022 IEEE/CVF Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 322–331.
Ibrahim, M. R., Benavente, R., Ponsa, D., and Lumbreras,
F. (2024). Unveiling the Influence of Image Super-
Resolution on Aerial Scene Classification. In Vas-
concelos, V., Domingues, I., and Paredes, S., edi-
tors, Progress in Pattern Recognition, Image Analysis,
Computer Vision, and Applications, Lecture Notes in
Computer Science, pages 214–228.
Jiang, K., Wang, Z., Yi, P., Jiang, J., Xiao, J., and Yao,
Y. (2018). Deep Distillation Recursive Network for
Remote Sensing Imagery Super-Resolution. Remote
Sensing, 10(11):1700.
Kim, J., Lee, J. K., and Lee, K. M. (2016). Accurate Im-
age Super-Resolution Using Very Deep Convolutional
Networks. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 1646–
1654.
Lanaras, C., Bioucas-Dias, J., Galliani, S., Baltsavias,
E., and Schindler, K. (2018). Super-resolution of
Sentinel-2 images: Learning a globally applicable
deep neural network. ISPRS Journal of Photogram-
metry and Remote Sensing, 146:305–319.
Ledig, C. and et al. (2017). Photo-Realistic Single Im-
age Super-Resolution Using a Generative Adversar-
ial Network. In 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 105–
114.
Liang, J., Cao, J., Sun, G., Zhang, K., Van Gool, L., and
Timofte, R. (2021). SwinIR: Image Restoration Using
Swin Transformer. In 2021 IEEE/CVF International
Conference on Computer Vision Workshops (ICCVW),
pages 1833–1844.
Lim, B., Son, S., Kim, H., Nah, S., and Lee, K. M. (2017).
Enhanced Deep Residual Networks for Single Im-
age Super-Resolution. In 2017 IEEE Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 1132–1140.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin, S.,
and Guo, B. (2021). Swin Transformer: Hierarchical
Vision Transformer using Shifted Windows. In 2021
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 9992–10002.
Shi, W., Caballero, J., Huszar, F., Totz, J., Aitken, A. P.,
Bishop, R., Rueckert, D., and Wang, Z. (2016). Real-
Time Single Image and Video Super-Resolution Us-
ing an Efficient Sub-Pixel Convolutional Neural Net-
work. In 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 1874–1883.
Tuna, C., Unal, G., and Sertel, E. (2018). Single-frame su-
per resolution of remote-sensing images by convolu-
tional neural networks. International Journal of Re-
mote Sensing, 39(8):2463–2479.
Wang, J., Gao, K., Zhang, Z., Ni, C., Hu, Z., Chen, D., and
Wu, Q. (2021). Multisensor Remote Sensing Imagery
Super-Resolution with Conditional GAN. Journal of
Remote Sensing, 2021:2021/9829706.
Wang, P., Bayram, B., and Sertel, E. (2022a). A compre-
hensive review on deep learning based remote sensing
image super-resolution methods. Earth-Science Re-
views, 232:104110.
Wang, X., Yu, K., Wu, S., Gu, J., Liu, Y., Dong, C., Qiao, Y.,
and Loy, C. C. (2019). ESRGAN: Enhanced Super-
Resolution Generative Adversarial Networks. In Leal-
Taix
´
e, L. and Roth, S., editors, Computer Vision –
ECCV 2018 Workshops, volume 11133, pages 63–79.
Springer International Publishing, Cham.
Wang, Z., Li, L., Xue, Y., Jiang, C., Wang, J., Sun, K., and
Ma, H. (2022b). FeNet: Feature Enhancement Net-
work for Lightweight Remote-Sensing Image Super-
Resolution. IEEE Transactions on Geoscience and
Remote Sensing, 60:1–12.
Woo, S., Park, J., Lee, J.-Y., and Kweon, I. S. (2018).
CBAM: Convolutional Block Attention Module. In
Ferrari, V., Hebert, M., Sminchisescu, C., and Weiss,
Y., editors, Computer Vision – ECCV 2018, Lecture
Notes in Computer Science, pages 3–19.
Xiao, T., Singh, M., Mintun, E., Darrell, T., Dollar, P., and
Girshick, R. (2021). Early Convolutions Help Trans-
formers See Better. In Advances in Neural Informa-
tion Processing Systems, volume 34, pages 30392–
30400.
Zhang, C., Jiang, W., Zhang, Y., Wang, W., Zhao, Q.,
and Wang, C. (2022). Transformer and CNN Hy-
brid Deep Neural Network for Semantic Segmentation
of Very-High-Resolution Remote Sensing Imagery.
IEEE Transactions on Geoscience and Remote Sens-
ing, 60:1–20.
Zhang, K., Li, Y., Zuo, W., Zhang, L., Van Gool, L., and
Timofte, R. (2021). Plug-and-Play Image Restoration
with Deep Denoiser Prior. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, pages 1–1.
Zhang, Y. and et al. (2018). Residual Dense Network for
Image Super-Resolution. In 2018 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 2472–2481.
Zhang, Y., Li, K., Li, K., Wang, L., Zhong, B., and Fu,
Y. (2018). Image Super-Resolution Using Very Deep
Residual Channel Attention Networks. In Ferrari, V.,
Hebert, M., Sminchisescu, C., and Weiss, Y., editors,
Computer Vision – ECCV 2018, volume 11211, pages
294–310. Springer International Publishing, Cham.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
582
