
ImgAdaPoinTr: Improving Point Cloud Completion via Images and
Segmentation
Vaagn Chopuryan
1 a
, Mikhail Kuznetsov
1,3 b
, Vasilii Latonov
1 c
and Natalia Semenova
1,2 d
1
Sberbank PJSC, 19 Vavilova St., Moscow 117312, Russia
2
AIRI, Nizhniy Susalnyy Lane 5, Moscow 105064, Russia
3
National Research Nuclear University MEPhI (Moscow Engineering Physics Institute),
31 Kashirskoe shosse, 31, Moscow 115409, Russia
Keywords:
Point Cloud Completion, Transformers, View-Guided, Segmentation.
Abstract:
Point cloud completion is an essential task consisting of inferring and filling in missing parts of a 3D point
cloud representation. In this paper, we present an ImgAdaPoinTr model, which extends the original Trans-
former encoder-decoder architecture by accurately incorporating visual information. Besides, we assumed
using segmentation of 3D objects as a part of the pipeline due to acquiring an additional increase in perfor-
mance. We also introduce the novel ImgPCN dataset generated by our rendering tool. The results show that
our approach outperforms AdaPoinTr by average 2.9% and 10.3% in terms of Chamfer-Distance L1 and L2
metrics, respectively. The code and dataset are available via the link https://github.com/ImgAdaPoinTr.
1 INTRODUCTION
A point cloud is a collection of data points in a three-
dimensional coordinate system, representing the ex-
ternal surface of an object or a space, often used in
3D modeling, computer graphics, and computer vi-
sion. The point cloud is a widely used data type that
represents 3D models (Berger et al., 2016) and could
be converted to the polygon mesh. The 3D scanning
devices like LiDARs and RGB-D scanners, used for
point cloud acquisition, have recently become more
accessible (Bi et al., 2021). The amount of these de-
vices applications increased (Raj et al., 2020). For
example, point clouds are used in real-time motion
capture (Li et al., 2022). As far as the clouds of
points produced by 3D scanning devices suffers from
incompleteness and inherent sparsity, the researchers
and developers face point clouds processing prob-
lems (Zeng et al., 2022). These disadvantages caused
by occlusions, device technical limitations, scanning
angles and internal algorithms weaknesses. More-
over, 3D scanning device misses some regions of the
scanned object due to the object’s complicated shape.
a
https://orcid.org/0009-0007-8205-6591
b
https://orcid.org/0009-0006-1315-7711
c
https://orcid.org/0000-0002-7810-8033
d
https://orcid.org/0000-0003-4189-5739
Point clouds have numerous important applications,
especially where information from 3D scanning sen-
sors is integrated with data from other sensors, such
as standard RGB cameras. For instance, self-driving
cars use LiDAR in conjunction with cameras to en-
hance motion tracking and object recognition (Ab-
basi et al., 2022; Shen et al., 2021). In the field of
robotics, data frequently originates from a variety of
sensor types. Therefore, adopting a sensor fusion ap-
proach for point cloud completion is an essential and
beneficial strategy.
The learning-based approaches using different
data types for pipeline input are called multi-modal or
cross-modal. The application of multimodal models
in different areas of deep learning, including 3D data
processing (Nichol et al., 2022; Poole et al., 2022)
has shown impressive results in various tasks such as
Zero-shot classification (Radford et al., 2021), gener-
ation from textual description (Ramesh et al., 2021)
and others. For instance, in the paper XMFnet (Aiello
et al., 2022) the information from the two modalities
in a localized latent space was united for point cloud
completion.
A view-guided solution for the task of point cloud
completion is presented in the work (Zhang et al.,
2021). The authors fuse information through a modal-
ity transfer technique. This technique involves the
concatenation of input point clouds and a convolu-
Chopuryan, V., Kuznetsov, M., Latonov, V. and Semenova, N.
ImgAdaPoinTr: Improving Point Cloud Completion via Images and Segmentation.
DOI: 10.5220/0012398100003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
47-58
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
47

tional network, and a part refinement stage, where
outputs from convolutional networks utilized in the
modality transfer are used. However, in this approach,
the 3D models from the test set, were also presented
in the training sample, which leads a high probability
of data leakage and ambiguous results.
In this paper we introduce a novel architecture for
point cloud completion based on the AdaPoinTr (Yu
et al., 2023) architecture. The new approach incorpo-
rates AdaPoinTr pipeline and features derived from
image rendered from 3D-models. The primary con-
tributions of this work are the following:
• We propose the ImgAdaPoinTr model for the
point cloud completion task. We integrated a
Multihead-Attention layers to facilitate a seamless
fusion of information from the image encoder and
the Geometry-aware Transformer Encoder. The
best performance was achieved by using our cus-
tom Cycle Loss.
• Our experiments show that using the segmenta-
tion module as a part of the pipeline is acquiring
an additional increase in performance for specific
classes. We propose the SegEncAdaPoinTr model
and describe the conditions.
• Also, we present a rendering toolkit
1
supporting
GPU parallel computing by which we obtained
the ImgPCN dataset for this work.
2 RELATED WORK
Existing learning-based point cloud completion meth-
ods can be divided into following types:
2.1 Point-Based Methods
Point-based methods have been explored for point
cloud completion, processing point clouds without
converting them into other representations. PointNet
and PointNet++ (Qi et al., 2017a; Qi et al., 2017b)
are among the works in this area, addressing the di-
rect processing of point clouds using symmetric func-
tions to handle unordered point sets. FoldingNet
(Yang et al., 2018) employs an autoencoder structure
to transform 2D grids into 3D structures, facilitating
the generation of 3D point clouds from encoded fea-
tures. PoinTr (Yu et al., 2021) uses transformers to
handle the irregularity and permutation invariance of
point clouds.
A limitation of FoldingNet is its use of the code-
word. The method constructs a 2D N × N grid and
1
https://github.com/Pytorch3DGenRenderer
appends a codeword to each point within this grid.
Subsequently, this vector is projected into a 3D space,
followed by precise spatial positioning adjustments.
The codeword poses a notable constraint, as it relies
on a singular global vector to reconstruct all points,
with a near-total lack of localized information.
PCN (Yuan et al., 2018) extends this approach.
While it also uses a codeword, which is one for all
points, it serves to produce a coarse point cloud. For
each point in this initial cloud, the FoldingNet tech-
nique is applied, considering both the point’s coor-
dinates and the codeword. However, even with the
regulation of coarse points using the EMD loss, but
codeword doesn’t change. In PSN, FoldingNet de-
coder operates under more advantageous conditions,
focusing on reconstructing local regions in relation to
the coarse points.
SnowflakeNet (Xiang et al., 2021) introduces a
unique perspective, modeling the generation of point
clouds akin to snowflake-like growth. This ap-
proach is based on specific points in 3D space, where
point clouds are progressively generated from desig-
nated parent points by splitting parent point features
through deconvolution.
SeedFormer (Zhou et al., 2022) presents a novel
shape representation termed ”Patch Seeds” for point
clouds. Additionally, it incorporates an innovative
Upsample Transformer during the generation process.
AdaPoinTr (Yu et al., 2023) is a model that em-
ploys the Transformer (Vaswani et al., 2017). Its pri-
mary objective is to harness the robust sequence-to-
sequence generation capabilities of the Transformer
architecture for point cloud completion tasks. Ini-
tially, coarse points are derived from incomplete data,
and after processing through the Transformer, they
obtain a more comprehensive set of coarse points for
the entire shape. Subsequently, a rebuild head is uti-
lized to generate a refined point cloud.
2.2 Voxel-Based Methods
Voxel-based methods have been investigated for har-
nessing the spatial locality inherent in point clouds.
Typically, these methods involve voxelizing 3D data
into occupancy grids or distance fields, which then
allows for the application of convolutional networks
(Dai et al., 2017; Han et al., 2017). One limitation of
this approach is the memory consumption of 3D data
processing. Point-Voxel CNN (Liu et al., 2019b) and
Relation-Shape CNN (Liu et al., 2019a) utilize con-
volution operations on voxelized data, targeting both
local spatial details and broader dependencies within
point cloud data. With increasing resolution, there is
a corresponding rise in computational demands. To
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
48

address this, GRNet (Xie et al., 2020) suggests the
use of gridding operations and 3D CNNs for an initial
coarse completion, followed by refinement processes
to produce detailed structures.
2.3 View-Guided Models
View-guided models, such as ViPC (Zhang et al.,
2021) and XMFNet (Aiello et al., 2022), integrate
point clouds and images for 3D reconstruction. ViPC
transforms 2D images into coarse point cloud, refines
details, and fuses them into a comprehensive 3D rep-
resentation. In contrast, XMFNet merges features
from partial point clouds and images using graph-
convolutional layers and attention mechanisms, re-
constructing the missing parts. Notably, XMFNet’s
training process and its efficacy have been validated
on the ShapeNet-ViPC dataset in various settings.
2.4 Generative Models
Generative models have been explored in the context
of point cloud completion. PU-GAN (Li et al., 2019)
and PU-Net (Yu et al., 2018) employ generative ad-
versarial networks (GANs) and upsampling networks,
respectively, to produce dense point clouds. Their ob-
jective is to ensure that the completed structures ex-
hibit geometric consistency and detail. RL-GAN-Net
(Sarmad et al., 2019) incorporates a reinforcement
learning agent with a GAN network, with the goal
of facilitating real-time point cloud shape completion.
A common limitation observed in these models is the
stability of their approaches, with instances of insta-
bility reported.
Other approaches, while potentially valuable in
their own contexts, are not discussed here due to their
limited relevance to our current work.
3 METHOD
3.1 Datasets
The ShapeNet-ViPC dataset, presented in the ViPC
paper (Zhang et al., 2021), stands as the singular
dataset for point cloud completion that incorporates
images. The original authors, however, did not release
the code for its generation. Addressing this absence,
we introduce the ImgPCN dataset, which merges
point cloud data with corresponding rendered images,
targeting a multimodal strategy for point cloud com-
pletion and reconstruction tasks. For its creation, we
employed our rendering tool, which will be detailed
Figure 1: Camera points trajectory: a circle parallel to the
sphere equator. The cube is a bounding box. Sphere is cal-
culated so each camera captures bounding box with desired
clearance.
subsequently. For each 3D model, 24 views were pro-
duced at 15-degree intervals around a 35-degree ele-
vation meridian in the ShapeNet-ViPC dataset man-
ner.
3.2 Rendering Tool
Our rendering tool is built upon the PyTorch3D li-
brary (Johnson et al., 2020). Each 3D model’s render
is determined by a specific set of parameters, provided
in respective configuration file.
For each rendered image the following rules are
satisfied. First, the virtual camera focal axis crosses
the center of model’s bounding box. Second, the dis-
tance between camera and bounding box center (let
us denote it by R) is calculated in such a way so the
main bounding box diagonal is completely seen from
any view angle.
The camera points of view lay on the specified tra-
jectory, which lays in the sphere of R radius. This tra-
jectory and the number of render points are set via the
tool interface. We used a circle parallel to the sphere
equator for dataset (see Figure 1).
The pipeline of our tool can be described as fol-
lows:
• Configuration file for each 3D model is generated.
This process can be automated.
• Subsequently, a master configuration file for the
overall generation is created by specifying the
path to the directory containing the individual ren-
dering configurations.
• An optimal distance R is calculated, ensuring its
complete fit within the image frame. The formula
1 describes the calculation method.
• Optionally, there is a provision to parallelize the
rendering process across multiple GPUs.
ImgAdaPoinTr: Improving Point Cloud Completion via Images and Segmentation
49
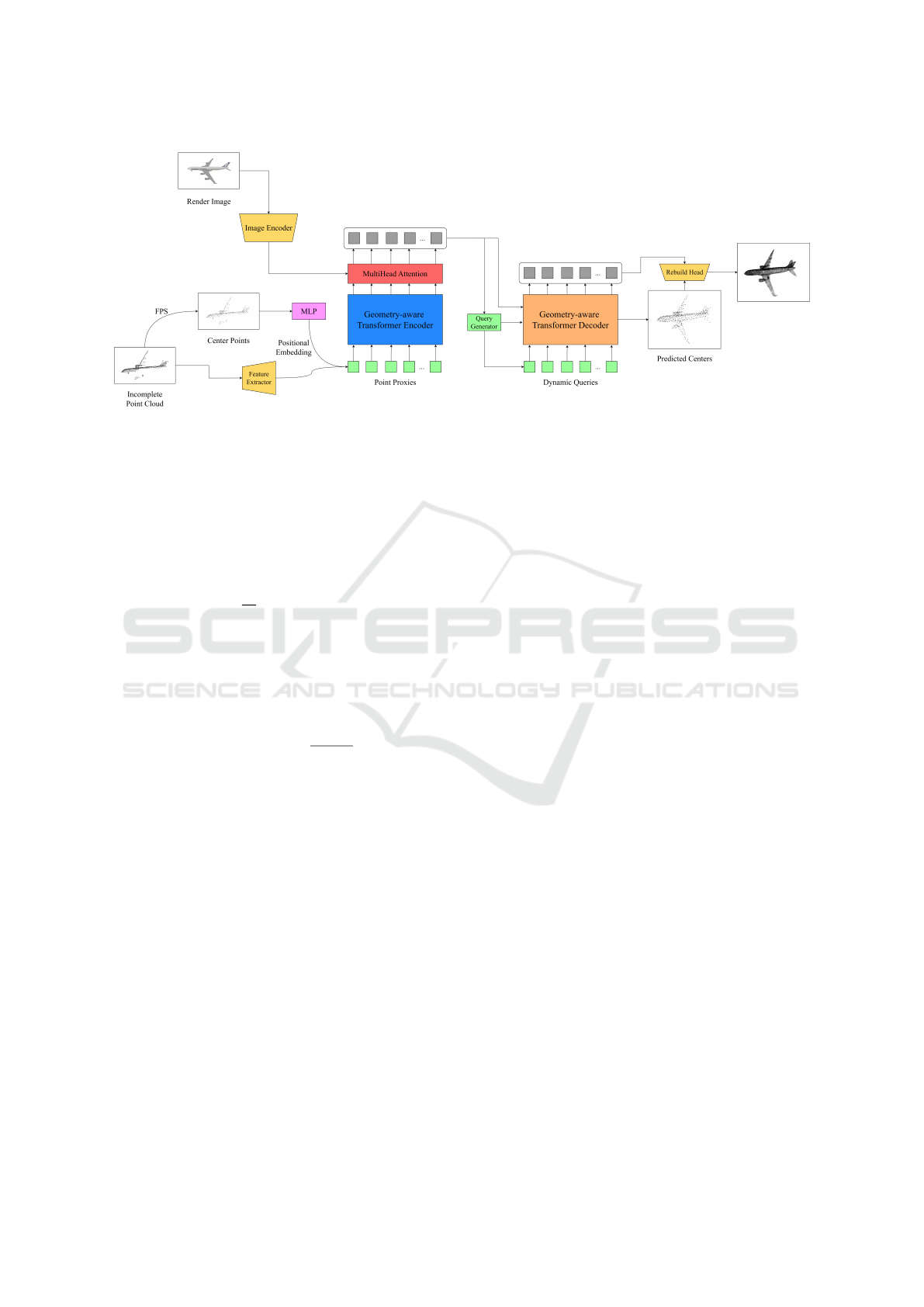
Figure 2: An extended pipeline scheme. Input partial point cloud is first downsampled to derive center points. Local features
around these center points are extracted using a lightweight DGCNN. Simultaneously, the Image Encoder processes the visual
data to extract image features. These features are fused with the local features extracted from the point cloud, incorporating
the spatial intricacies of the visual data. With the addition of positional embedding to the fused features, they are channeled
into a Geometry-aware Transformer Encoder-Decoder architecture. Through multi-head attention mechanisms, this structure
predicts point proxies for the missing regions of the point cloud. Finally, the Rebuild Head refines these point proxies,
completing the point cloud in a coarse-to-fine manner.
Here we describe how optimal distance R is cal-
culated:
R =
(
d f
wp
, d > d
min
0.68, d ≤ d
min
(1)
where d is a bounding box main diagonal, f is a cam-
era focal length, w is an image width pixels number
(here we suppose that desired image is squared) and
p is a width portion that defines a clearance between
the render border and model image. The focal length
is calculated by formula: f =
w/2
tan(ϕ/2)
, where ϕ is a
camera field of view angle. The threshold d
min
= 0.78
was obtained empirically.
3.3 Architecture Overview
The architecture proposed in this work is based on the
AdaPoinTr model, which has demonstrated state-of-
the-art results in point cloud completion by employ-
ing a Transformer-based encoder-decoder mechanism
and dynamic query generation. While maintaining the
core components of AdaPoinTr, novel elements are
introduced. In particular, an Image Encoder and an
additional layer in the Transformer architecture were
added. The additional layer’s aim is to integrate mul-
timodal data and enhance the model’s capacity to gen-
erate comprehensive point clouds.
The following sections provide a detailed
overview of the architecture, highlighting both the
inherited components from AdaPoinTr and our novel
contributions.
Preprocessing and Local Feature Extraction. The
initial phase involves the input partial point cloud pre-
processing. The input point cloud is downsampled
and specific center points are obtained. This step is
required to avoid big time and RAM resources con-
sumption. Subsequently, a lightweight Deep Graph
Convolutional Neural Network (DGCNN) (Wang
et al., 2019) is used to extract local features around
center points, providing a foundational feature repre-
sentation for subsequent processing stages.
Point Proxies and Positional Embedding. The ex-
tracted local features, in conjunction with positional
embedding, are transformed into a sequence of point
proxies. These proxies are a compact representa-
tion of local regions within the point clouds, encap-
sulating both spatial and feature information in a for-
mat amenable to processing via the subsequent Trans-
former architecture.
Integration of Image Encoder. In our novel con-
tribution, an Image Encoder is introduced to extract
pertinent information from rendered images. This en-
coder processes the renders, extracting features that
encapsulate texture and lighting information, which
are then integrated into the point cloud completion
process.
Geometry-Aware Transformer Encoder-Decoder
Architecture - Encoder. The Transformer encoder
processes the sequence of point proxies, utilizing self-
attention mechanisms to capture dependencies within
the data, both at local and global scales.
Additional Layer. A novel layer, which employs
Multihead Attention, is introduced to fuse the output
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
50

of the Transformer encoder with the output of the Im-
age Encoder. This layer is pivotal in integrating infor-
mation from the point cloud and image data, ensur-
ing that the subsequent decoding process can leverage
features from both modalities.
Dynamic Queries. Dynamic queries are generated
by the model, which are utilized by the Transformer
decoder to infer missing elements based on learn-
able pairwise interactions among features of the input
point cloud and queries.
Decoder. The Transformer decoder, utilizing the en-
coded features and dynamic queries, predicts point
proxies for the missing parts of the point cloud.
Point Cloud Completion and Refinement. Pre-
dicted Centers: The predicted point proxies are uti-
lized to infer centers for the missing parts of the point
cloud, providing a coarse completion.
Rebuild Head. A Multi-Layer Perceptron (MLP) and
a Rebuild Head are employed to further complete the
point cloud based on the predicted point proxies, en-
suring a coarse-to-fine completion strategy.
Refinement. Subsequent to the initial completion,
the model employs a series of refinement modules to
further refine the final prediction of the point cloud,
enhancing the accuracy and detail of the completed
point cloud.
The completed pipeline scheme is depicted on
Figure 2. In summary, while our architecture retains
the robustness of the AdaPoinTr model, the introduc-
tion of the Image Encoder and the additional Mul-
tihead Attention layer represents our primary novel
contributions, facilitating the integration of multi-
modal data and potentially enhancing the model’s ca-
pacity to generate detailed and accurate point cloud
completions. Further experimental validation, de-
tailed in subsequent sections, elucidates the impact
and efficacy of these novel components within the
point cloud completion task.
3.4 Loss Function
We introduce a composite loss function based on the
terms used in AdaPoinTr approach. Let us introduce
terms used for loss function composition. We denote
by C the predicted local centers set. More we denote
by P the set of points of complete point cloud and by
G the ground truth point cloud. Therefore the loss
functions are defined by the formulas:
J
0
=
1
|C|
∑
c∈C
min
g∈G
∥c − g∥ +
1
|G|
∑
g∈G
min
c∈C
∥g − c∥ (2)
J
1
=
1
|P|
∑
p∈P
min
g∈G
∥p − g∥ +
1
|G|
∑
g∈G
min
p∈P
∥g − p∥ (3)
J
denoise
=
1
|
ˆ
P
i
|
∑
c∈
ˆ
P
i
min
g∈G
gt
ci
∥c − g∥+
+
1
|G
gt
ci
|
∑
g∈G
gt
ci
min
c∈
ˆ
P
i
∥g − c∥
(4)
where J
0
, J
1
, and J
denoise
represent the Chamfer Dis-
tance loss (CD) for local centers, complete point
clouds, and the denoising loss, respectively.
ˆ
P
i
and
G
gt
ci
represent the predicted and ground-truth local
shapes, respectively.
We propose a special function λ
coarse
, which is in-
spired by the Cycle Learning Rate Scheduler (Smith,
2017). We name this function Cycle Loss. The pri-
mary objective behind this function is to gradually
diminish the influence of coarse point clouds during
training as the model progressively learns superior
representations. This function is used as the J
0
term
weight in the composite loss function.
Given parameters:
• s — step size, defines how often the λ
coarse
coef-
ficient should peak;
• c
min
— minimal λ
coarse
value;
• c
max
— maximal λ
coarse
value;
• γ — exponential scaling factor for the learning
rate;
• n — the epoch index (epochs are enumerated with
natural numbers);
The total loss is computed as follows:
cycle =
1 +
L
2s
(5)
x =
L
s
− 2 · cycle + 1
(6)
λ
cr
(n) = c
min
+ (c
max
− c
min
)max(0,(1 − x))γ
n
(7)
where cycle computes the current cycle count, x cal-
culates the absolute position within the current cycle,
and λ
cr
adjusts the impact of the coarse point cloud
during training.
The total loss function is formulated as:
J
PC
= λ
cr
J
0
+ J
1
+ λJ
denoise
(8)
4 EXPERIMENTAL RESULTS
4.1 Experimental Settings
In this section we provide description, evaluation and
analysis of performed experiments. All experiments
ImgAdaPoinTr: Improving Point Cloud Completion via Images and Segmentation
51

Table 1: Result on the PCN and ImgPCN(12 views) datasets. We use the CD-L1 (multiplied by 1000) to compare ImgAda-
PoinTr with other methods. * Denotes the top result within its experimental group, surpassing the value in AdaPoinTr.
Name AVG Airplane Cabinet Car Chair Lamp Sofa Table Boat F@1%
FoldingNet 14.310 9.490 15.800 12.610 15.550 16.410 15.970 13.650 14.99 0.322
PCN 9.640 5.500 22.700 10.630 8.700 11.000 11.340 11.680 8.590 0.695
GRNet 8.830 6.450 10.370 9.450 9.410 7.960 10.510 8.440 8.044 0.708
SnowFlake 7.210 4.290 9.160 8.080 7.890 6.070 9.230 6.550 6.400 -
SeedFormer 6.740 3.850 9.050 8.060 7.060 5.210 8.850 6.050 5.850 -
AdaPoinTr 6.528 3.681 8.823 7.476 6.850 5.478 8.353 5.801 5.763 0.845
SegEncAdaPoinTr 6.569 *3.544 8.893 7.404 6.939 *5.189 8.544 6.179 5.862 *0.847
ImgAdaPoinTr 6.347 3.515 8.540 *7.425 6.677 5.065 8.082 5.714 5.756 0.857
ImgEncSegDecAPTr 6.339 3.461 8.646 *7.437 6.616 5.065 8.140 5.685 5.660 0.859
were carried out on the PCN and ImgPCN datasets.
Both datasets consists of 30974 models from 8 cate-
gories: airplane, cabinet, car, chair, lamp, sofa, table,
and watercraft. The complete point clouds are created
by uniformly sampling 16384 points from the mesh
surfaces, while the partial point clouds originate from
back-projecting 2.5D depth images into a 3D space. A
defining distinction between PCN and ImgPCN lies in
the images procured through rendering aligned with
meshes from ShapeNetCoreV1. Each object is ren-
dered from 24 unique viewpoints, producing images
with a resolution of 224x224 pixels.
Our approach adopted 256 points as input to
the transformer-encoder, and 512 points for the
transformer-decoder, with the number of queries be-
ing set at 512. In both the encoder and decoder, we
employed a dimension of 384, with 6 heads, and a K
value of 8. The transformer-encoder has a depth of
6, while the transformer-decoder delves deeper with
a depth of 8. As our choice of image encoder, we
opted for ResNet18. Although we experimented with
alternatives like ResNet50 and ConvNext, as depicted
in Table 3, ResNet18 emerged superior. The atten-
tion mechanism mirrored that of the XMFNet (Aiello
et al., 2022), incorporating both self and cross atten-
tions spanning two layers.
4.2 Main Result
Throughout our experiments, we converged on the
ImgAdaPoinTr architecture, which emerged as the
top-performing solution. ImgAdaPoinTr: ResNet18
Encoder with Cycle Loss. Various strategies, such
as linear reduction and the Cycle Loss approach,
were employed to strategically diminish the specified
loss component. To assess our method, we compare
it against several state-of-the-art methods using the
PCN dataset and the CD-L1 metric. We evaluated our
architecture using 12 random viewing points for each
object from the test set. The results are presented in
Table 1. As can be seen from Table 1, ImgAdaPoinTr
and its enhanced versions outperform all other meth-
ods. For certain object classes, the improvement is as
significant as 8.15% and average 2.9%.
The segmentator significantly impacts point cloud
completion capabilities. Tables 4 and 5 demonstrate
that the object classes, on which GDANet (Xu et al.,
2021) was trained, benefit from the inclusion of the
segmentator in the architecture. Specifically, SegEn-
cAdaPoinTr attained the optimal performance on CD-
L1 for car (where improvements are challenging) and
showed a 32.43% enhancement on the CD-L2 metric
for airplane.
The Figure 3 reveals that the airplane’s wing edges
are distinctly articulated, reflecting a kind attention
to detail. For cars, there’s enhanced detailing on the
mirrors and wheels. The chair is presented as a unified
object, devoid of any missing components.
4.3 Ablation Studies
We study the impact of another pipeline configura-
tions to make sure that our comparison is as fair as
possible. We consider 4 types of pipeline modifica-
tions on the base of using images and segmentation.
4.3.1 Enhancement Through Variable Loss
Throughout the training process, we progressively di-
minish the impact of the error associated with the
coarse points cloud. We experimented with both lin-
ear and cyclic strategies. The cycle reduce approach
yielded slightly better results. We marked it as Ada-
PoinTrVarLoss.
4.3.2 Enhancement Through Image Encoder
Integration
• ImgEncAdaPoinTr Resnet Encoder. Enhance
feature fusion by integrating a transformer layer
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
52
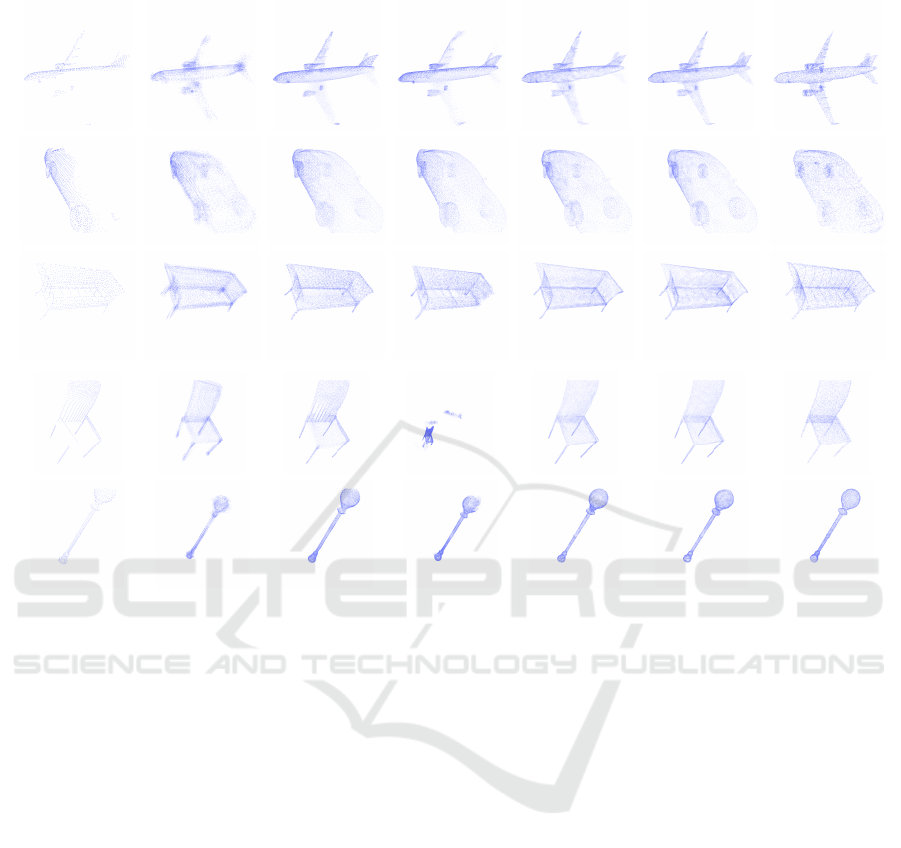
Partial GRNet SnowFlake SeedFormer AdaPoinTr ImgAdaPoinTr GT
Figure 3: Visual comparison of point cloud completion on PCN dataset.
to fuse features from the primary pipeline, Ada-
PoinTr, and features derived from ResNet18. The
transformer layer accepts the output from the
transformer encoder, aiming to leverage the ro-
bustness of ResNet18 in conjunction with Ada-
PoinTr.
• ImgCrossEncAdaPoinTr. Fusing features from
transformer Encoder using Cross-Encoder. Im-
plement a Cross-Encoder layer (Reimers and
Gurevych, 2019) to fuse features from the Ada-
PoinTr pipeline and ResNet18. This layer takes
the output from the transformer encoder, aiming
to harness the feature extraction capabilities of a
Cross-Encoder.
• ImgCrossDecAdaPoinTr. Fusing features from
transformer Decoder using Cross-Encoder. Simi-
lar to previous experiment, but use Cross-Encoder
(Reimers and Gurevych, 2019) after transformer
decoder.
4.3.3 Enhancement via Utilization of
Pre-Trained Segmentator
The central thesis for the incorporation of the
GDANet segmentator (Xu et al., 2021) is based on the
hypothesis that a model pre-trained on a point cloud
to comprehend the class of object parts, can infuse ad-
ditional information conducive to the completion of
generating absent object components.
• SegEncAdaPoinTr. Utilizing GDANet Encoder.
We use GDANet segmentation model pre-trained
on ShapeNet-part dataset. Utilizing a mask to fil-
ter by classes due to the relatively normal cover-
age on only 4 out of 8 classes in the PCN dataset,
the layer accepts output from the transformer en-
coder.
• SegEncDecAdaPoinTr. Similar to SegEncAda-
PoinTr but use fuse layer twice after transformer
encoder and decoder layers.
• SegCrossEncAdaPoinTr. Integrate a Cross-
Encoder layer to fuse features from AdaPoinTr
and GDANet segmentator. Employing a mask for
class filtering due to specific dataset constraints,
the layer accepts output from the transformer en-
coder.
• SegCrossDecAdaPoinTr. Implement a Cross-
Encoder layer (Reimers and Gurevych, 2019)
for feature fusion from AdaPoinTr and GDANet
transformer decoder.
ImgAdaPoinTr: Improving Point Cloud Completion via Images and Segmentation
53
Table 2: Ablation Study: Assessing the impact of archi-
tectural elements added to the AdaPoinTr (Evaluated using
CD-L1). (A) is ImgEncAdaPoinTr.
Name VarLoss ImgEnc AVG
AdaPoinTr 6.528
AdaPoinTrVarLoss ✓ 6.482
(A) ✓ 6.409
ImgAdaPoinTr ✓ ✓ 6.347
Table 3: Ablation study on different image encoders designs
on the PCN Dataset (Evaluated using CD-L1).
Image Encoder Design CD-L1(AVG)
ConvNext 6.636
ResNet50 6.426
ResNet18 6.347
• TripleSegFoldNetAdaPoinTr. Utilize L2-
distance to identify nearest and farthest points,
employing distances for sampling points and
corresponding features as positive and negative
examples, input into TripleLoss.
4.3.4 Enhancement Through Fusing Image
Encoder Integration and Pre-Trained
Segmentator
• ImgEncSegDecAPTr. Enhance feature fusion by
integrating a transformer layer to fuse features
from the primary pipeline, AdaPoinTr, and fea-
tures derived from ResNet18. The transformer
layer accepts the output from the transformer
encoder, aiming to leverage the robustness of
ResNet18 in conjunction with AdaPoinTr. Sim-
ilar to SegEncDecAdaPoinTr, we utilize a fusion
layer, but this occurs only after the transformer
decoder layers.
4.4 Experiment Analysis
The comparison showed that the most efficacious re-
sults were obtained utilizing the ResNet Encoder cou-
pled with Cycle Loss. This approach facilitated the
attainment of a state-of-the-art result on the PCN
dataset, surpassing AdaPoinTr.
In Table 1, a comparative analysis of ImgAda-
PoinTr with other architectures is presented, focusing
on the point completion task using the PCN dataset.
The evaluation metric employed for this compari-
son is the Chamfer Distance L1 (CD-L1) and F-
Score@1% averaged over all classes.
A detailed comparative analysis with AdaPoinTr
(Yu et al., 2023), which served as the foundational
model for our research, is subsequently provided. The
entirety of the work can be bifurcated into two pri-
mary segments. The first encompasses the utiliza-
tion of an image encoder and a variable loss func-
tion, while the second pertains to the incorporation of
supplementary information derived from a pretrained
segmentator.
Three pivotal experiments were conducted within
the realm of image encoder utilization, which are pre-
sented down below.
4.4.1 Development of the Core Strategy
AdaPoinTr was augmented with a variable loss func-
tion, adjusting the coefficient value associated with
the loss obtained during the coarse generation phase.
As shown in the Table 2 this modification yielded a
performance enhancement of 0.7%. Subsequently, an
image encoder, specifically ResNet18, was integrated
into AdaPoinTr, and its output was fused with the out-
put from the transformer encoder, resulting in a per-
formance boost of 1.82%. In Table 2 is (A). The
final iteration combined both the variable loss func-
tion and the image encoder, leading to an aggregate
improvement of 2.77%, which surpasses the cumu-
lative impact of the individual components. As il-
lustrated in Tables 6 in terms of CD-L1 metric, Im-
gAdaPoinTr improves the result by 7.54% the most
in the Lamp category. In Table 7 based on the CD-
L2 metric, the best performance is observed for the
Lamp and Airplane categories, with scores of 27.55%
and 25.71%, respectively. Conversely, there is only
a minimal improvement observed in the categories of
cars and boats measured using the CD-L1 metric. We
have a hypothesis that achieving significant improve-
ment for car is challenging, given the numerous ob-
jects within them where the scale of incomplete and
complete point clouds does not align. As illustrated
in Figure 4, we observed a reduction in both the me-
dian and maximum values for the CD-L1 and CD-L2
metric.
As illustrated in Figure 4, we observed a reduction
in both the median and maximum values for the CD-
L1 metric.
4.4.2 Image Encoders Designs
The second experiment revolved around the selection
of the optimal image encoder. Three encoder architec-
tures, namely ResNet18, ResNet50, and ConvNext,
were evaluated. The findings, as tabulated in Table 3,
revealed that ResNet18 outperformed the others, with
ConvNext deteriorating the CD-L1 metric by 1.65%
and ResNet50 enhancing it by 1.56%.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
54
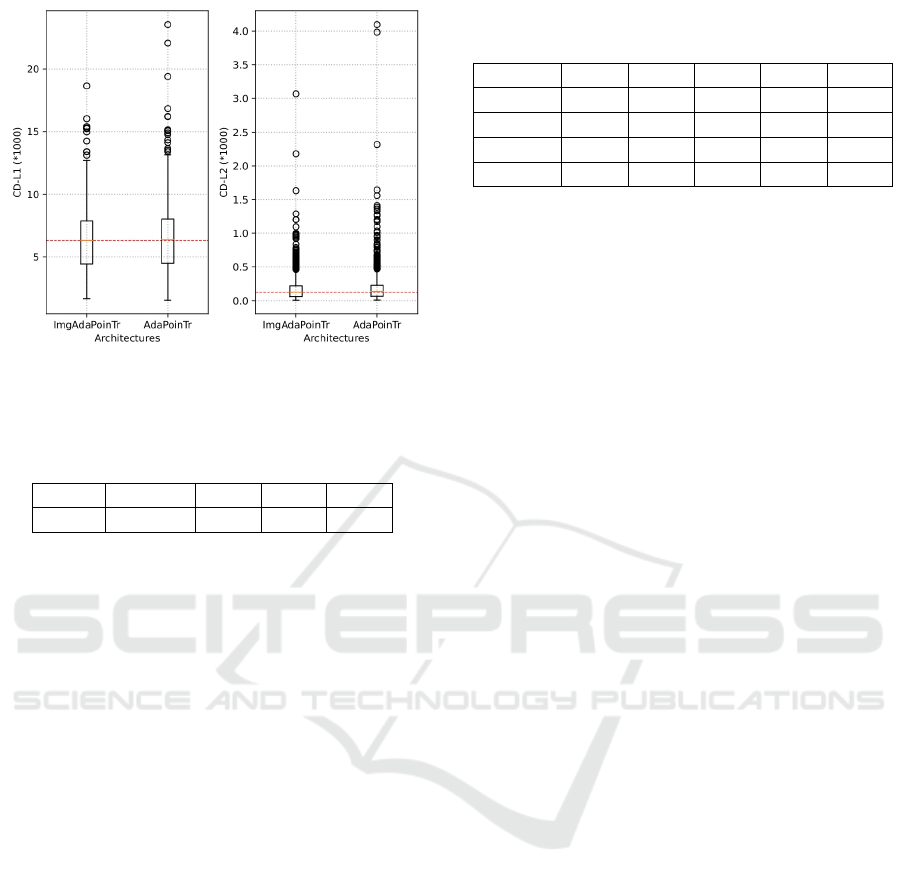
Figure 4: The difference in results between ImgAdaPoinTr
and AdaPoinTr on the test dataset using the CD-L1 and CD-
L2 metrics multiplied by 1000.
Table 4: Percentage Overlap of objects Between ShapeNet-
Part and PCN Datasets.
Lamp Airplane Chair Table Car
66.69 66.50 55.10 61.25 12.05
4.4.3 Design of the Image Encoder’s Integration
The third experiment was dedicated to assessing the
architectural design of the image encoder’s integra-
tion. Various strategies were explored, such as intro-
ducing the image encoder’s output in the rebuild head
as a global feature, post the transformer encoder layer,
post the transformer decoder layer, and a simultane-
ous integration in both encoder and decoder, similar
to the XMFNet architecture (Aiello et al., 2022). The
most promising results were obtained when the im-
age encoder’s output was introduced post the trans-
former encoder. An alternative method for fusion is
cross-encoder. Tables 6, 7 and 8 (presented in Ap-
pendix) provide an exhaustive comparative analysis
of these methodologies based on metrics like Cham-
fer Distance L1 (CD-L1), Chamfer Distance L2 (CD-
L2) and Earth Mover’s Distance (EMD). All meth-
ods showed an improvement in metrics compared to
AdaPoinTr. When comparing ImgEncAdaPoinTr and
ImgCrossEncAdaPoinTr, it’s clear that ImgEncAda-
PoinTr generally outperforms based on the CD-L1
metric. It slightly underperforms only in the Car and
Airplane categories, but excels in the others.
4.4.4 Segmentator
Next, we intend to describe the experimental results
with the segmentator. In our investigations, we ex-
plored the potential of leveraging segmentation tech-
niques to enhance point completion tasks. The un-
Table 5: Distribution of object segments within each cate-
gory. Values in percentages.
Seg. ID Airpl. Car Chair Lamp Table
1 45.60 5.49 34.17 16.37 73.12
2 32.34 6.90 41.12 60.20 23.11
3 12.80 16.43 21.57 1.23 3.77
4 9.26 71.18 3.14 22.20 -
derlying hypothesis was predicated on the notion that
the vector representation of an individual point, em-
ployed for object part classification, would inherently
encapsulate pertinent information conducive to the
point completion task.
As shown in Table 6, the conducted experiments
did not yield improvements in the CD-L1 metric on
average across all objects. However, when consider-
ing specific classes, for instance, SegEncAdaPoinTr
improved by 3.86%, 0.96% (the best result among all
experiments), and 5.27% for airplane, car, and lamp,
respectively. We have a proposed explanation for this
behavior, which we will detail below. We would like
to highlight that at least one variant from the segmen-
tator architectures enhances results for the following
classes: airplane, car, chair (marginally), and lamp.
In Table 7 when evaluated against the CD-L2 met-
ric, the SegCrossDecAdaPoinTr model exhibited a
notable improvement of 2.58% across all objects and
11.43%, 6.93%, and 16.33% for the airplane, chair,
and lamp categories, respectively. It is noteworthy
that all segmentation-based experiments rendered im-
provements for the airplane and lamp categories, with
the exception of TripleSegFoldNetAdaPoinTr for the
chair category. Furthermore, it is imperative to high-
light that the employed segmentator was trained on a
distinct dataset, albeit derived from ShapeNet. Table
4 displays the percentage overlap between ShapeNet-
Part (Yi et al., 2016) and PCN datasets. A dis-
cernible pattern emerges from this data: the positive
outcomes attributed to the segmentator align predomi-
nantly with object categories that exhibit dataset over-
lap between ShapeNet-Part and PCN. As illustrated in
Table 8, SegEncAdaPoinTr outperformed other vari-
ants across the Earth Mover’s Distance (EMD) met-
ric, establishing itself as the most efficacious model
in our segmentation-based experiments. SegCross-
DecAdaPoinTr, while slightly inferior, still demon-
strated improvements across most metrics compared
to AdaPoinTr.
Among our experimental endeavors, we did not
discern any substantial impact on outcomes when
masking objects from classes present in PCN but ab-
sent in ShapeNet-part (Yi et al., 2016). However, we
have a hypothesis that augmenting the number of ob-
ject part classes and ensuring comprehensive overlap
ImgAdaPoinTr: Improving Point Cloud Completion via Images and Segmentation
55

in segmentation might yield more pronounced results
in future investigations. We assume that having a
diverse array of segments for each object category,
without pronounced imbalances, is crucial. As ob-
served in Table 6, segmentation didn’t enhance the
outcomes for tables. This can be linked to the distri-
bution where over 96% of the table points are associ-
ated with two classes, and fewer than 4% with a third
class. This distribution is detailed in Table 5.
5 CONCLUSIONS
This study presented the line of models for point
cloud completion by accurately incorporating a view-
guided approach and segmentation. This method uti-
lizes images and incomplete point clouds to address
the task. The ImgAdaPoinTr performs better for all
classes of 3D objects considered in comparison with
baselines. The best results were received by ImgEnc-
SegDecAPTr, which is enchanced by fusion of im-
age features and segmentation simultaneously. We
also introduce the ImgPCN dataset, generated via our
open-source rendering tool, which provides a new re-
source for evaluating point cloud completion tech-
niques. Due to the revealed limitations of existing
pre-trained segmentation models, we plan to widen
ImgPCN with segmentation markdown and set up a
precise experiment for fusing.
REFERENCES
Abbasi, R., Bashir, A. K., Alyamani, H. J., Amin, F., Doh,
J., and Chen, J. (2022). Lidar point cloud compres-
sion, processing and learning for autonomous driving.
IEEE Transactions on Intelligent Transportation Sys-
tems, 24(1):962–979.
Aiello, E., Valsesia, D., and Magli, E. (2022). Cross-modal
learning for image-guided point cloud shape comple-
tion. Advances in Neural Information Processing Sys-
tems, 35:37349–37362.
Berger, M., Tagliasacchi, A., Seversky, L., Alliez, P., Guen-
nebaud, G., Levine, J., Sharf, A., and Silva, C.
(2016). A Survey of Surface Reconstruction from
Point Clouds. Computer Graphics Forum, page 27.
Bi, S., Yuan, C., Liu, C., Cheng, J., Wang, W., and Cai, Y.
(2021). A survey of low-cost 3d laser scanning tech-
nology. Applied Sciences, 11(9).
Dai, A., Ruizhongtai Qi, C., and Nießner, M. (2017).
Shape completion using 3d-encoder-predictor cnns
and shape synthesis. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 5868–5877.
Han, X., Li, Z., Huang, H., Kalogerakis, E., and Yu, Y.
(2017). High-resolution shape completion using deep
neural networks for global structure and local geom-
etry inference. In Proceedings of the IEEE interna-
tional conference on computer vision, pages 85–93.
Johnson, J., Ravi, N., Reizenstein, J., Novotny, D., Tulsiani,
S., Lassner, C., and Branson, S. (2020). Accelerating
3d deep learning with pytorch3d. In SIGGRAPH Asia
2020 Courses, SA ’20, New York, NY, USA. Associ-
ation for Computing Machinery.
Li, J., Zhang, J., Wang, Z., Shen, S., Wen, C., Ma, Y., Xu,
L., Yu, J., and Wang, C. (2022). Lidarcap: Long-
range markerless 3d human motion capture with lidar
point clouds. In 2022 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
20470–20480, Los Alamitos, CA, USA. IEEE Com-
puter Society.
Li, R., Li, X., Fu, C.-W., Cohen-Or, D., and Heng, P.-A.
(2019). Pu-gan: a point cloud upsampling adversar-
ial network. In Proceedings of the IEEE/CVF inter-
national conference on computer vision, pages 7203–
7212.
Liu, Y., Fan, B., Xiang, S., and Pan, C. (2019a). Relation-
shape convolutional neural network for point cloud
analysis. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
8895–8904.
Liu, Z., Tang, H., Lin, Y., and Han, S. (2019b). Point-voxel
cnn for efficient 3d deep learning. Advances in Neural
Information Processing Systems, 32.
Nichol, A., Jun, H., Dhariwal, P., Mishkin, P., and Chen,
M. (2022). Point-e: A system for generating 3d
point clouds from complex prompts. arXiv preprint
arXiv:2212.08751.
Poole, B., Jain, A., Barron, J. T., and Mildenhall, B. (2022).
Dreamfusion: Text-to-3d using 2d diffusion. arXiv
preprint arXiv:2209.14988.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. Advances in neural information pro-
cessing systems, 30.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., et al. (2021). Learning transferable visual models
from natural language supervision. In International
conference on machine learning, pages 8748–8763.
PMLR.
Raj, T., Hashim, F. H., Huddin, A. B., Ibrahim, M. F., and
Hussain, A. (2020). A survey on lidar scanning mech-
anisms. Electronics, 9(5).
Ramesh, A., Pavlov, M., Goh, G., Gray, S., Voss, C., Rad-
ford, A., Chen, M., and Sutskever, I. (2021). Zero-shot
text-to-image generation. In International Conference
on Machine Learning, pages 8821–8831. PMLR.
Reimers, N. and Gurevych, I. (2019). Sentence-BERT: Sen-
tence embeddings using Siamese BERT-networks. In
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
56

Inui, K., Jiang, J., Ng, V., and Wan, X., editors, Pro-
ceedings of the 2019 Conference on Empirical Meth-
ods in Natural Language Processing and the 9th Inter-
national Joint Conference on Natural Language Pro-
cessing (EMNLP-IJCNLP), pages 3982–3992, Hong
Kong, China. Association for Computational Linguis-
tics.
Sarmad, M., Lee, H. J., and Kim, Y. M. (2019). Rl-gan-
net: A reinforcement learning agent controlled gan
network for real-time point cloud shape completion.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 5898–
5907.
Shen, Z., Liang, H., Lin, L., Wang, Z., Huang, W., and
Yu, J. (2021). Fast ground segmentation for 3d lidar
point cloud based on jump-convolution-process. Re-
mote Sensing, 13(16):3239.
Smith, L. N. (2017). Cyclical learning rates for training
neural networks. In 2017 IEEE winter conference on
applications of computer vision (WACV), pages 464–
472. IEEE.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin,
I. (2017). Attention is all you need. In Guyon,
I., Luxburg, U. V., Bengio, S., Wallach, H., Fer-
gus, R., Vishwanathan, S., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 30. Curran Associates, Inc.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn
for learning on point clouds. ACM Transactions on
Graphics (tog), 38(5):1–12.
Xiang, P., Wen, X., Liu, Y.-S., Cao, Y.-P., Wan, P., Zheng,
W., and Han, Z. (2021). Snowflakenet: Point cloud
completion by snowflake point deconvolution with
skip-transformer. In Proceedings of the IEEE/CVF
international conference on computer vision, pages
5499–5509.
Xie, H., Yao, H., Zhou, S., Mao, J., Zhang, S., and Sun, W.
(2020). Grnet: Gridding residual network for dense
point cloud completion. In European Conference on
Computer Vision, pages 365–381. Springer.
Xu, M., Zhang, J., Zhou, Z., Xu, M., Qi, X., and Qiao,
Y. (2021). Learning geometry-disentangled represen-
tation for complementary understanding of 3d object
point cloud. In Proceedings of the AAAI conference on
artificial intelligence, volume 35, pages 3056–3064.
Yang, Y., Feng, C., Shen, Y., and Tian, D. (2018). Fold-
ingnet: Point cloud auto-encoder via deep grid defor-
mation. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 206–
215.
Yi, L., Kim, V. G., Ceylan, D., Shen, I.-C., Yan, M., Su, H.,
Lu, C., Huang, Q., Sheffer, A., and Guibas, L. (2016).
A scalable active framework for region annotation in
3d shape collections. SIGGRAPH Asia.
Yu, L., Li, X., Fu, C.-W., Cohen-Or, D., and Heng, P.-A.
(2018). Pu-net: Point cloud upsampling network. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 2790–2799.
Yu, X., Rao, Y., Wang, Z., Liu, Z., Lu, J., and Zhou, J.
(2021). Pointr: Diverse point cloud completion with
geometry-aware transformers. In Proceedings of the
IEEE/CVF international conference on computer vi-
sion, pages 12498–12507.
Yu, X., Rao, Y., Wang, Z., Lu, J., and Zhou, J. (2023).
Adapointr: Diverse point cloud completion with adap-
tive geometry-aware transformers. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
45:14114–14130.
Yuan, W., Khot, T., Held, D., Mertz, C., and Hebert, M.
(2018). Pcn: Point completion network. In 2018 inter-
national conference on 3D vision (3DV), pages 728–
737. IEEE.
Zeng, J., Wang, D., and Chen, P. (2022). A survey on
transformers for point cloud processing: An updated
overview. IEEE Access, 10:86510–86527.
Zhang, X., Feng, Y., Li, S., Zou, C., Wan, H., Zhao, X.,
Guo, Y., and Gao, Y. (2021). View-guided point cloud
completion. In 2021 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
15885–15894, Nashville, TN, USA. IEEE.
Zhou, H., Cao, Y., Chu, W., Zhu, J., Lu, T., Tai, Y., and
Wang, C. (2022). Seedformer: Patch seeds based
point cloud completion with upsample transformer. In
European conference on computer vision, pages 416–
432. Springer.
APPENDIX
We present the tables with our experimental results
of ablation study on the next page. For last breaking
results see our https://github.com/ImgAdaPoinTr
ImgAdaPoinTr: Improving Point Cloud Completion via Images and Segmentation
57
Table 6: Result of experiments on the ImgPCN dataset. We use the CD-L1 (multiplied by 1000) to compare AdaPoinTr with
other our experiments. We conducted separate evaluations: one with architectures that incorporate an image encoder and
another with a segmentator. For methods incorporating an image encoder, we present two rows. In the top row, the metric is
assessed using 6 random viewing points for each object from the test set. For the bottom row, the number of random viewing
points is 12. * Denotes the top result within its experimental group, surpassing the value in AdaPoinTr.
Name AVG Airplane Cabinet Car Chair Lamp Sofa Table Watercraft
AdaPoinTr 6.528 3.681 8.823 7.476 6.850 5.478 8.353 5.801 5.763
AdaPoinTrVarLoss 6.482 3.614 8.746 7.422 6.845 5.277 8.365 5.831 5.755
ImgEncAdaPoinTr
6.414
6.409
3.596
3.586
8.701
8.713
7.517
7.489
6.614
6.621
5.217
5.218
8.165
8.155
5.785
5.783
5.714
5.709
ImgAdaPoinTr (our)
6.356
6.347
3.520
3.515
8.533
8.540
7.437
*7.425
6.690
6.677
5.086
5.065
8.105
8.082
5.715
5.714
5.762
5.756
ImgCrossEncAdaPoinTr
6.487
6.482
3.573
3.571
8.868
8.864
7.429
7.448
6.692
6.683
5.439
5.426
8.217
8.199
5.890
5.883
5.787
5.787
SegCrossEncAdaPoinTr 6.660 3.610 8.970 7.529 6.872 5.567 8.567 6.256 5.915
SegCrossDecAdaPoinTr 6.549 3.649 8.882 7.519 *6.808 5.311 8.522 5.924 5.780
SegEncAdaPoinTr 6.569 *3.544 8.893 7.404 6.939 *5.189 8.544 6.179 5.862
SegEncDecAdaPoinTr 6.595 3.649 9.003 7.526 6.830 5.383 8.525 6.058 5.784
TripleSegFoldNetAdaPoinTr 6.658 3.722 8.980 7.561 7.009 5.329 8.725 6.079 5.856
Table 7: Result of experiments on the ImgPCN dataset. We use the CD-L2 (multiplied by 1000) to compare AdaPoinTr with
other our experiments. We conducted separate evaluations: one with architectures that incorporate an image encoder and
another with a segmentator. * Denotes the top result within its experimental group, surpassing the value in AdaPoinTr.
Name AVG Airplane Cabinet Car Chair Lamp Sofa Table Watercraft
AdaPoinTr 0.194 0.070 0.319 0.185 0.202 0.196 0.305 0.140 0.133
AdaPoinTrVarLoss 0.185 0.055 0.297 0.181 0.199 0.164 0.310 0.143 0.131
ImgEncAdaPoinTr
0.183
0.183
0.055
0.054
0.303
0.304
0.204
0.200
0.175
0.177
0.160
0.159
0.287
0.286
0.150
0.149
0.132
0.132
ImgAdaPoinTr (our)
0.176
0.174
0.053
*0.052
0.287
0.287
0.194
0.192
0.185
0.183
0.145
0.142
0.268
0.262
0.140
0.138
0.138
0.137
ImgCrossEncAdaPoinTr
0.192
0.191
0.053
0.053
0.324
0.323
0.192
0.195
0.182
0.182
0.183
0.180
0.303
0.300
0.161
0.159
0.137
0.137
SegCrossEncAdaPoinTr 0.204 0.050 *0.315 0.187 0.190 0.193 0.323 0.235 0.138
SegCrossDecAdaPoinTr *0.189 0.062 0.320 0.190 0.188 0.164 0.313 0.141 0.134
SegEncAdaPoinTr 0.205 0.048 0.318 *0.182 0.201 *0.161 0.358 0.227 0.144
SegEncDecAdaPoinTr 0.197 0.056 0.326 0.190 *0.186 0.164 0.341 0.180 0.135
TripleSegFoldNetAdaPoinTr 0.209 0.066 0.332 0.191 0.226 0.166 0.379 0.172 0.141
Table 8: Result of experiments on the ImgPCN dataset. We use the EMD (multiplied by 1000) to compare AdaPoinTr with
other our experiments. We conducted separate evaluations: one with architectures that incorporate an image encoder and
another with a segmentator. * Denotes the top result within its experimental group, surpassing the value in AdaPoinTr.
Name AVG Airplane Cabinet Car Chair Lamp Sofa Table Watercraft
AdaPoinTr 24.46 14.12 34.14 30.69 22.36 20.86 32.80 18.09 22.60
AdaPoinTrVarLoss 24.17 13.86 33.48 30.37 22.20 20.47 32.89 17.78 22.31
ImgEncAdaPoinTr
23.38
23.40
14.11
14.09
31.22
31.20
29.41
29.38
21.01
21.09
20.85
20.94
31.47
31.53
16.93
16.91
22.07
22.06
ImgAdaPoinTr (our)
22.79
22.78
13.39
13.37
30.54
30.53
29.20
29.17
20.94
20.93
20.09
20.10
30.09
30.14
16.63
16.58
21.46
21.46
ImgCrossEncAdaPoinTr
23.19
23.20
13.75
13.76
31.77
31.78
29.76
29.79
21.10
21.14
19.75
*19.75
30.76
30.79
17.30
17.29
21.35
21.32
SegCrossEncAdaPoinTr 25.05 14.17 34.34 30.61 22.47 23.48 33.58 19.01 22.75
SegCrossDecAdaPoinTr 23.98 13.90 33.20 *29.68 22.36 20.53 32.27 *17.96 21.95
SegEncAdaPoinTr *23.74 *13.74 *33.05 29.80 *22.02 19.05 *32.02 18.28 22.00
SegEncDecAdaPoinTr 24.57 14.34 33.40 30.93 22.78 21.70 32.50 18.46 22.48
TripleSegFoldNetAdaPoinTr 24.50 15.20 32.95 29.91 23.26 20.28 32.13 20.45 *21.81
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
58
