
Handing Pedagogical Scenarios Back over to Domain Experts: A
Scenario Authoring Model for VR with Pedagogical Objectives
Mathieu Risy
a
, Val
´
erie Gouranton
b
and Bruno Arnaldi
c
Univ. Rennes, INSA Rennes, Inria, CNRS, IRISA, France
Keywords:
Virtual Reality, Scenario, Pedagogy, Authoring, Welding Use Case.
Abstract:
Teachers and trainers make pedagogical decisions for their training courses, so why not do the same for Virtual
Reality (VR) training courses? Virtual Environments for Training (VETs) are becoming prominent educational
tools. However, VET models have yet to propose scenario authoring aligned with pedagogical objectives that
can account for the diversity of approaches available to teachers. This paper proposes a scenario authoring
model for VET that directly involves domain experts and validates their pedagogical objectives. In addition,
it proposes the coexistence of multiple pedagogical scenarios within the same VET, using three types of
scenarios. The validity of the model is then discussed using a VR welding application as a use case.
1 INTRODUCTION
Virtual Reality (VR) has shown promising educa-
tional benefits (Dalgarno and Lee, 2010) manifested
by the growing number of Virtual Environments for
Training (VET). However, current VR authoring tools
remain difficult for trainers (Ashtari et al., 2020).
While hardly standardized, VET design generally re-
quires a Domain Expert at its initiative, and an ex-
pert in VR development. In this paper, for the sake of
simplicity, the term Domain Expert refers to a person
knowledgeable in the learning content, and includes
the roles of both teachers and pedagogical experts.
A scenario, in the context of a Virtual Environ-
ment (VE), organizes the sequences of events that un-
fold at runtime. It characterizes the user’s actions and
interactions, and the VE entities’ behaviors. The ex-
ecution of a VR application always results in a sce-
nario unfolding, whether expressed explicitly or im-
plied. The explicit expression of the scenario serves
a monitoring purpose and allows it to manage the
VE. Scenario authoring is the writing of a machine-
interpretable scenario for the VE.
Current development practices leave scenario au-
thoring to the VR expert, with no standards taking
into account the Domain Expert’s Pedagogical Speci-
fications. We argue that it would be more efficient for
a
https://orcid.org/0009-0004-6248-9988
b
https://orcid.org/0000-0002-9351-2747
c
https://orcid.org/0000-0002-2868-8826
the Domain Expert to write the VET scenario as the
person responsible for the learning content and ped-
agogical decisions. The term VET here includes all
types of higher education learning in VEs and does
not only apply to professional training. In this paper,
we propose a scenario authoring model (Section 3)
that meets the following criteria:
• Domain Experts are able to author Pedagogical
Scenarios according to their Pedagogical Objec-
tives.
• The model uses pedagogical principles that are fa-
miliar to Domain Experts and understandable by
the VET.
• The model allows for the definition of multiple
teaching methods under the same VET.
We then illustrate the model implementation using a
use case (Section 4): a welding training application
(Figure 1). We conclude by discussing the capabilities
of the model with Domain Experts (Section 5).
2 RELATED WORK
This section highlights related work on pedagogy
integration in VETs and VET models. It outlines
the main pedagogical approaches used in VETs. It
then presents the integration of their specifications in
machine-interpretable models. Finally, observation of
related VET models provides insight into the current
state of pedagogical scenario authoring.
Risy, M., Gouranton, V. and Arnaldi, B.
Handing Pedagogical Scenarios Back over to Domain Experts: A Scenario Authoring Model for VR with Pedagogical Objectives.
DOI: 10.5220/0012397800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 103-114
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
103

(a) Error-spotting environment. (b) Welding station environment.
Figure 1: Environments of the VR welding training application use case.
2.1 Pedagogical Approaches in VET
The educational use of VR has extended beyond
the field of research and is mature enough to allow
for a closer examination of its practices. Some au-
thors (Garz
´
on et al., 2020; Mikropoulos and Natsis,
2011; Radianti et al., 2020) state that a minority of
VETs declare a pedagogical approach. Among these
approaches, almost all take reference from the learn-
ing theory of constructivism (Piaget, 1950) or more
specific theories derived from its principles. Accord-
ing to constructivism learners actively construct their
knowledge based on their previous experiences. This
emphasizes the need for an active learning process
with contextualized learning material. Constructivist
principles lend well to VR learning affordances (Dal-
garno and Lee, 2010), notably allowing for engage-
ment in contextualized experiential learning.
While constructivism seems to be the most com-
monly used learning theory, some VETs rely on other
pedagogical approaches. The “VR nugget” based ap-
proach (Horst et al., 2022) combines generic stan-
dalone micro-learning patterns in VR to construct a
course that provides on-demand interactions. Con-
structivism is also less compatible with lecture-based
learning. Bowman et al. decided not to use a con-
structivist approach to illustrate abstract design prin-
ciples to students (Bowman et al., 1999). Finally, Ra-
dianti et al. reported on a VET using the learning the-
ory of behaviorism. This theory states that knowledge
is external and acquired through reinforcement of re-
warding or punishing consequences (Schunk, 2012).
2.2 Pedagogical Specifications in VET
Machine-interpretable Pedagogical Specifications in-
troduce pedagogical logic in virtual environments.
Using generic models, they can represent multiple
types of pedagogical decisions in the VET.
The structure of a course is a classic specification
for planning learning sessions. However, VET mod-
els often represent only low-level activities, such as
tasks and actions (Johnson and Rickel, 1997; Ger-
baud et al., 2008; Buche et al., 2010). While this may
be sufficient for short procedures and intervention, it
fails to meet the organizational needs for longer and
more modular learning interventions. Higher levels of
structure can be achieved by interconnecting multiple
learning activities (Udeozor et al., 2023) or using ex-
isting learning modeling specifications. IMS Learn-
ing Design (IMS LD) (Koper et al., 2003) is a well-
known specification that has been integrated in VET
models (Marion et al., 2009). It uses a generic “Play-
Act-Learning Activity” structure to model learning
interventions of arbitrary length, while being generic
enough not to enforce a procedural type of learning.
Role specifications can be effective for modeling
multiple behavior types for pedagogical agents. They
allow for the assignment of different objectives and
interactions to multiple actors (Claude et al., 2014).
Roles can represent asymmetric interactions such as a
trainer-trainee collaboration or hierarchical positions.
This idea can be expanded to teams and organiza-
tions (Buche et al., 2004; Claude et al., 2015). Such
teams and organizations facilitate modifications to the
behavior of a group of actors with different roles but
similar objectives.
Recurring pedagogical patterns are also a form
of Pedagogical Specifications. “VR nuggets” (Horst
et al., 2022) use generic VR patterns such as manipu-
lating, decomposing, or tagging objects.
The expression of learning theory specifications in
VET models raises the question of their integration in
automated environments. The Game-Based Assess-
ment Framework (GBAF) (Udeozor et al., 2023) uses
Constructive Alignment (Biggs, 1999) as a design ap-
proach for VET. This constructivist theory proposes
to design learning activities from reliable and observ-
able descriptions of the Pedagogical Objectives. The
learner’s progress toward the objectives is measured
using Assessments derived from these criteria. Thus,
it provides easily implementable automatic assess-
ment that is relevant to the Domain Expert.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
104

2.3 Pedagogical Scenario Authoring
Pedagogical scenario authoring is the writing of ped-
agogical decisions in the VET scenario. The simplest
approach is to manually enable or disable pedagogi-
cal support such as instructions, guidance, and feed-
back. However, this approach lacks adaptability and
can result in the pedagogy blending with the code. As
a result, pedagogical scenarios typically use explicit
representations to facilitate their editing, analysis, and
reuse (Gerbaud et al., 2008).
Procedural scenarios provide a clear baseline of
the task sequences and goals to be achieved in or-
der to complete the procedure (Claude et al., 2014).
For example, pedagogical components can hint at
future steps (Gerbaud et al., 2008; Richard et al.,
2021). Conversely, deviations from the baseline fa-
vor the detection of errors. Procedural scenarios also
provide precise control over authorized actions. In
GVT (Gerbaud et al., 2008), the pedagogy engine
supports strategies to allow or block the actions avail-
able to users in real-time. The Domain Expert can
write adaptive strategies, but still requires a VR ex-
pert to implement them. Another approach is the
transmission of pedagogy through agents. In MAS-
CARET (Buche et al., 2004), agents form pedagogi-
cal strategies based on their role, knowledge, and the
learner’s progress. A domain model, in the form of
an ontology written by the Domain Expert, contains
semantic information about the environment and the
learning domain. While this provides a more ecolog-
ical environment, pedagogical authoring is scarcely
constrained by the Domain Expert. The types of reac-
tions of the agents are pre-planned, leaving only the
selection of the agents and their roles to the authoring.
The authoring of error responses is a powerful
pedagogical tool. HERA’s (Amokrane et al., 2008)
risk model and errors notify a rule-based pedagogical
module that allows or blocks scripted responses and
the unfolding of risk consequences. The PEGASE
model (Buche et al., 2010) introduces the authoring
of multiple pedagogical approaches in the form of
rules for agents’ attitudes and reactions to error de-
scriptors. However, defining these rules still requires
coding knowledge. Procedural approaches have po-
tent capabilities, but action sequence descriptions lack
generality. They quickly become unsuitable for sce-
narios with low interest in representing intermediate
steps.
“Emergent approaches, by a clever modelling
of small behaviours of the world, allow new situa-
tions to arise” (Lanquepin et al., 2013). These ap-
proaches focus on a rich description of interactions
and constraints rather than modeling users’ progres-
sion (Claude et al., 2014). The HUMANS suite (Lan-
quepin et al., 2013) relies on reasoning based on se-
mantic information, causality, and domain knowledge
without using scripted events. It provides a reactive
ecological environment, but pedagogical authoring is
limited to defining the initial situation and to non-
trivial authoring of agents’ reasoning.
Goal-based authoring approach uses environmen-
tal constraints and VET states as key scenario points
to be achieved (Porteous et al., 2010). It provides a
more familiar authoring format while retaining peda-
gogical control by using a higher-level description of
the VE. It relies on modeling shared properties (Bou-
ville et al., 2015) and causal information (Buche et al.,
2010). Goal-based approaches remain rare, although
Steve (Johnson and Rickel, 1997) is one of the best-
known VET examples. Steve is an agent that provides
guidance on a maintenance task using a set of goals
connected by causal links and preconditions.
Assessment-based approaches (Udeozor et al.,
2023) are more flexible than goal-based approaches.
Progress within the scenario is based on complete
or partial validation of assessment. Such assess-
ments can concern, for example, following each step
of a procedure, setting the environment in a specific
state, attaining an objective, or providing a correct
answer. Assessment-based approaches propose a new
scenario layer that can observe both the progression of
goals and procedures. To the best of our knowledge,
there have been very few assessment-based proposals.
Udeozor et al. proposed the GBAF as a framework for
Domain Experts to author VETs aligned with Ped-
agogical Objectives. Assessment-based approaches
present interesting properties drawing on procedural
and goal-based approaches while being closer to the
pedagogical practices of Domain Experts.
2.4 Toward a New VET Framework
While great efforts have been made toward producing
credible agents and ecological environments, we have
found no satisfying solution to provide a complete
VET scenario authoring process for Domain Experts,
aligned with their objectives and supporting multi-
ple learning approaches. Only one model has pre-
cisely described support for multiple pedagogical ap-
proaches (Buche et al., 2010). While it offers precise
authoring control, it is inaccessible without a strong
background in coding and does not guarantee peda-
gogical coherence.
Procedural approaches lend themselves well to
pedagogical authoring, but lack generality. While
ontologies seem to provide powerful insight into the
learning domain, they do not ensure pedagogical con-
Handing Pedagogical Scenarios Back over to Domain Experts: A Scenario Authoring Model for VR with Pedagogical Objectives
105
SCENARIO AUTHORING
Write
MONITORING
Error
Scenarios
Trigger
Reference
Scenario
Pedagogical
Scenarios
Control Progression
VIRTUAL
ENVIRONMENT
PEDAGOGICAL SPECIFICATIONS
DOMAIN EXPERT
LEARNER
ValidateInform
Control
Observe
Interact
Interact
Interact
Assess
Observe
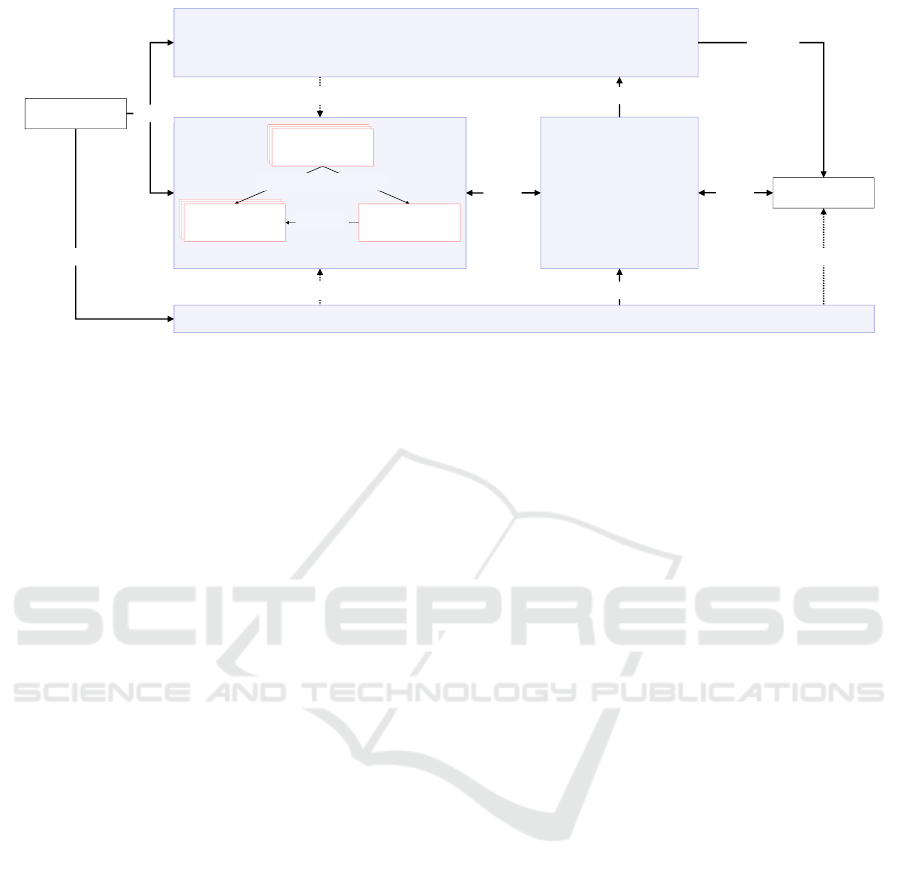
Figure 2: Overview of the components that make up the scenario authoring model.
trol. In addition, they are difficult for Domain Experts
to find and write. Emergent scenarios offer rich envi-
ronments but give little control to the Domain Expert.
Finally, goal- and assessment-based approaches have
rarely been implemented, but show promising capa-
bilities for a generic pedagogical authoring model.
Additionally, these approaches highlight interesting
authoring possibilities that may conform with the Do-
main Expert’s objectives and assessments.
3 SCENARIO AUTHORING
MODEL WITH PEDAGOGICAL
OBJECTIVES
We argue that the scenario of a VET should be writ-
ten by the Domain Expert. Much like Domain Ex-
perts, scenarios drive the learning session, monitor
progress, and can adapt both content and Pedagogi-
cal Guidance. We propose a scenario authoring model
that aligns the VET with the Pedagogical Objectives
of the Domain Expert. Furthermore, we introduce the
authoring of multiple pedagogical approaches within
the same VET in the form of a new pedagogical sce-
nario layer.
This section provides a general overview of the
model. It then details each type of scenario that com-
poses the model and their use of the Pedagogical
Specifications. Finally, it explains the monitoring as-
pect of the model.
3.1 Model Overview
Our scenario authoring model uses an assessment-
based approach (Udeozor et al., 2023). It allows for
an intuitive and flexible authoring process based on
the Pedagogical Specifications of the Domain Expert.
In essence, Assessments represent monitoring speci-
fications that validate the Pedagogical Objectives and
influence progression within the scenario.
The scenario authoring model presents the learner
with a global learning scenario that combines three
types of scenarios: a Reference Scenario, Error Sce-
narios, and the active Pedagogical Scenario (Fig-
ure 2). The Reference Scenario (Section 3.2) de-
fines what the learner can do as long as the action
is not classified as an error. Most importantly, the
Assessments and objectives it contains define what
the learner is expected to do. Error Scenarios (Sec-
tion 3.3) represent typical deviations from the Refer-
ence Scenario that should not occur. Finally, the Ped-
agogical Scenario (Section 3.4) implements the peda-
gogical decisions. It provides Pedagogical Guidance
and adapt the learning experience. This distinction fa-
cilitates the writing and coexistence of multiple ped-
agogical approaches by separating the measurement
of the learner’s progress from the pedagogical deci-
sions. These decisions are added on top of the Refer-
ence Scenario by Pedagogical Scenarios.
The scenarios belongs to one of the four key inter-
acting components that compose the model. Figure 2
illustrates the communication between the Pedagogi-
cal Specifications, Scenario Component, Virtual En-
vironment (VE), and Monitoring Component.
• Pedagogical Specifications contain the definition
of the Pedagogical Objectives, the Assessments
required to achieve them, and the Learning Activi-
ties that support their achievement (Section 3.2.1).
• The Scenario Component is informed by the
Pedagogical Specifications and manages their im-
plementation in the VE. Its task is to orchestrate
events and interactions to help achieve the Peda-
gogical Objectives (Section 3.4).
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
106
• The learner interacts with a Virtual Environment
informed by the Pedagogical Specifications and
controlled by the Scenarios’ progression.
• The Monitoring Component observes the state
of the VET and provides the means to interact
with it outside of scenario execution (Section 3.5).
3.2 Reference Scenario
The Reference Scenario sets the expected standard of
the learner’s proficiency. It represents the achieve-
ment of the Pedagogical Objectives.
First, the Reference Scenario provides the means
of monitoring the learner’s progress toward the ob-
jectives. It considers a theoretical user who validates
the highest level of each Assessment without the need
for support or instructions. Consequently, it does not
force the learner to pass the Assessments. These de-
cisions are left up to the Pedagogical Scenarios. Us-
ing a welding training application as an example (see
Section 4), one Assessment of its Reference Scenario
evaluates weld quality. The reference does not change
whether a learner succeeds or fails the Assessment.
However, Pedagogical Scenarios can react to the As-
sessment in order to change the outcomes.
Second, the Reference Scenario defines the scope
of the actions that can be performed without being
classified as an error. In the case of a procedural ac-
tivity, the definition of possible actions might take the
form of branching paths. However, this representa-
tion is not suitable for every activity. In such cases,
a goal-based approach might be more appropriate. It
implicitly contains every action possible, unless they
trigger a state of error. We propose a hybrid approach
that uses the most appropriate scenario representation
for each specification on a case-by-case basis.
The Reference Scenario uses automated Assess-
ments to monitor the learner’s actions and mea-
sure progression toward the Pedagogical Objectives.
Therefore, the Pedagogical Specifications need to
be machine-interpretable. Consequently, we de-
cided to introduce the Constructive Alignment prin-
ciple (Biggs, 1999) in our model. It allows for the
alignment of the VET’s behavior with the Domain
Expert’s needs (Udeozor et al., 2023). It has the addi-
tional benefit of facilitating discussions between Do-
main Experts and VR experts.
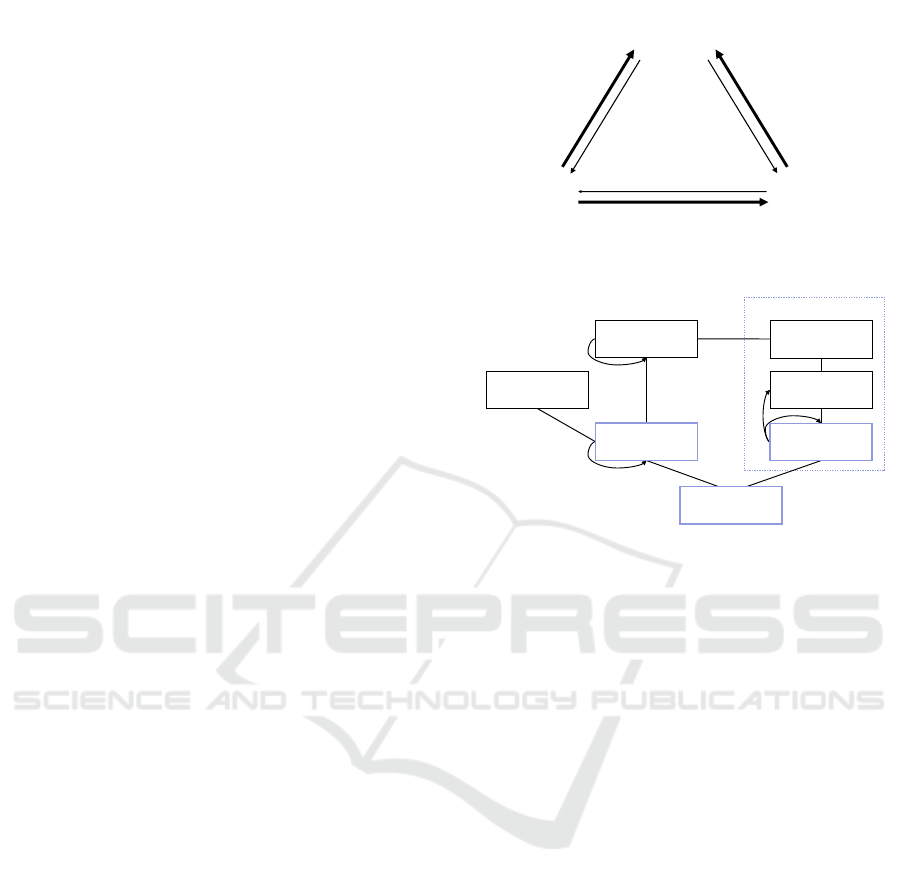
3.2.1 Constructive Alignment
Constructive Alignment (Biggs, 1999) is an educa-
tional principle for the design of learning interven-
tions and programs. Its core proposal is that the
learner’s progression toward Pedagogical Objectives
Prepare
Guide
design
Allow
achievement
Measure
validation
levels
1. ILOS
(OBJECTIVES)
3. LEARNING
ACTIVITIES
2. ASSESSMENTS
Guide
design
Validate objectives using
Figure 3: Constructive Alignment, adapted from the works
of John Biggs (Biggs, 1999) and Elie Milgrom.
STRUCTURE
Prerequisites,
Levels
Prerequisites
Sub-objectives
ILO
Training
Course
Module
Pedagogical
Objectives
Learning
Taxonomy
Assessment
*
*
*
*
*
1
*
*
*
*
1
Learning
Activity
*
*
*
*
Figure 4: Pedagogical Specifications of the scenario author-
ing model.
should be assessed using reliable and observable cri-
teria, known as Intended Learning Outcomes (ILOs).
ILOs are defined as “statements, written from the stu-
dents’ perspective, indicating the level of understand-
ing and performance they are expected to achieve as a
result of engaging in the teaching and learning expe-
rience” (Biggs and Tang, 2011). They derive directly
from the objectives and are used as core elements to
create Learning Activities. Constructive Alignment
requires three steps (see Figure 3):
1. Definition of the ILOs.
2. Definition of the Assessments based on the de-
scriptions of the ILOs.
3. Designing of the Learning Activities, using As-
sessments to validate the ILOs.
Our model directly integrates these three key elements
into the Pedagogical Specifications Component (Fig-
ure 4). They provide information relevant to both Do-
main Experts and VET scenarios. The Constructive
Alignment process is illustrated in Section 4.3 using
a welding training application as a use case.
3.2.2 ILOs
An ILO describes one or multiple levels of profi-
ciency. It is written using Observable Action Verbs
(OAVs) to define precisely how its statements are to
be evaluated. Each ILO level is related to a learning
Handing Pedagogical Scenarios Back over to Domain Experts: A Scenario Authoring Model for VR with Pedagogical Objectives
107

taxonomy level to express the type of cognitive task
involved. Bloom’s revised taxonomy (Anderson and
Krathwohl, 2001) and SOLO taxonomy (Biggs and
Collis, 1982) are two well-known examples. Using
the same example of a welding training application,
Table 1 illustrates an ILO associated with the Peda-
gogical Objective of learning welding practice. The
Reference Scenario ensures the implementation of ev-
ery ILO under the Pedagogical Specifications.
Table 1: Example of an ILO description. Basic welding
practice for a welding training application.
ILO - Basic welding practice
Time: After preparation of the welding station
and application of safety measures.
Level 1
Taxonomy (Bloom): Remember
Taxonomy (SOLO): Unistructural
Description: The learner is able to:
- Move the welding torch in a straight line.
- Maintain constant and appropriate speed,
height, and angle.
Level 2
Taxonomy (Bloom): Analyze
Taxonomy (SOLO): Multistructural
Description: The learner is able to:
- Correct the welding parameters during practice
if they deviate from the standard.
Level 3
Taxonomy (Bloom): Evaluate
Taxonomy (SOLO): Relational
Description: The learner is able to:
- Evaluate the weld quality visually after practice.
- Correct their next practice using the identified
errors.
3.2.3 Assessments
Assessments naturally derive from the observable
statements of the ILOs. While they can be used for
grading purposes, their primary objective is to moni-
tor the learner’s progression. They are not required to
be visible to the learner and are often implicitly inte-
grated within the VE. An Assessment derives from a
single ILO and contributes to its validation. For ex-
ample, two Assessments can be derived from the ILO
in Table 1. The first compares weld and gesture pa-
rameter values to the standard. The second evaluates
the evolution of weld quality over time. The valida-
tion of an Assessment is set by the Domain Expert
as a percentage of the progression of the ILO. Some
Assessments may even allow for partial validation.
3.2.4 Learning Activities
Learning Activities are defined in the final step of the
Constructive Alignment. They describe the learning
context for the achievement of the ILOs and how the
Assessments are applied. Let us take the example of
a Learning Activity relating to the ILO described in
Table 1 and other practice-oriented ILOs. This ac-
tivity describes the means to achieve ILOs and their
Assessments in the form of a contextualized welding
environment that contains several metal plates. It de-
scribes the interactions and behaviors for the weld-
ing of metal plates according to the configurations de-
scribed by the ILOs.
Learning Activities represent the basic units of a
scenario that a learner can complete. Pedagogical
Specifications include a Structure specification (Fig-
ure 4) to help group and filter these activities. It uses
three hierarchical levels “Training Course-Modules-
Learning Activities”, where the Learning Activity is
the lowest. The Structure does not provide the order
of execution of its sub-parts. This pedagogical deci-
sion is left up to each Pedagogical Scenario.
3.3 Error Scenarios
Error Scenarios represent typical deviations from the
Reference Scenario. For the purpose of comple-
menting the Reference Scenario, the definition of
an error includes any behavior that demonstrates the
non-mastery of an ILO. This may include hesita-
tions, or taking too long without committing any mis-
takes. The Domain Expert is responsible for defining
whether part of a scenario part belongs to the Refer-
ence Scenario, or is represented as an Error Scenario.
Error Scenarios have two roles. First, they notify
the VET when a state of error is triggered. This allows
the active Pedagogical Scenario and the Monitoring
Component to act where appropriate. Second, they
can represent either or both error consequences and
corrective measures that allow the learner to return to
the Reference Scenario. For example, in the case of
a welding training application, welding without open-
ing the gas bottle will trigger an Error Scenario. This
notifies the VET of the error and represents the conse-
quences, namely more sparks and poor weld quality.
As the error is not fatal, it allows the learner to stop
welding, open the gas bottle, and return to the Refer-
ence Scenario.
Triggering an Error Scenario does not necessarily
result in its execution. Pedagogical Scenarios handle
the VET’s reaction to the triggering of an Error Sce-
nario, based on the pedagogical decisions they repre-
sent.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
108
STRUCTURE
SCENARIOS
Interact
Prerequisites, Levels
Prerequisites
Sub-objectives
Error Scenario
ILO
Training Course
Learning
Activity
Module
Pedagogical
Objectives
Learning
Taxonomy
VIRTUAL
ENVIRONMENT
Reference
Scenario
Assessments
Scenario Structure
Pedagogical
Guidance
Interact
Observe
Interact
DOMAIN EXPERT
Observe
Learner
Control
MONITORING
Scenario ILOs
Assessments
Pedagogical
Scenario
Assessments
Scenario Structure
Inform
Scenario ILOs
Assessment
Class
Triggers
Instances of Class
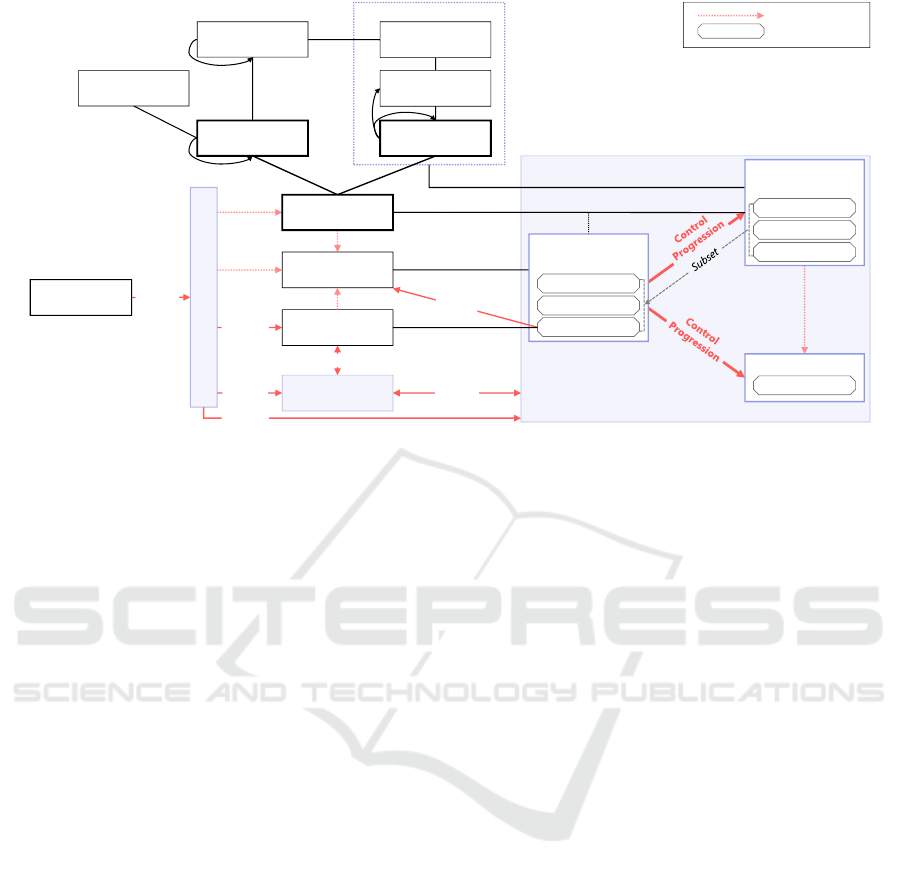
Figure 5: Detailed view of the scenario authoring model.
3.4 Pedagogical Scenarios
Pedagogical Scenarios represent the pedagogical de-
cisions made to allow the learner to achieve all or part
of the Pedagogical Objectives. Because of this status,
they complement and have control over the Reference
Scenario and Error Scenarios.
Each Pedagogical Scenario contains a subset of
the Reference Scenario’s ILOs, Assessments, and
Structure (Figure 5). This subset represents the focus
of the Pedagogical Scenario. The Structure can auto-
matically filter out its sub-parts that are not associated
with the subset of ILOs. It narrows down the Learning
Activities and Assessments that the learner will inter-
act with, either by blocking or not monitoring parts of
the Reference Scenario. For example, in the case of a
welding training application (Section 4), the Domain
Expert may wish to focus solely on safety as part of an
introductory course. The associated Pedagogical Sce-
nario thus contains only activities relevant to safety
and does not evaluate welding practice. In addition,
it provides relevant guidance to emphasize the role of
each welding safety practice and piece of equipment,
and to prevent dangerous behavior.
3.4.1 Structure Ordering
Each Pedagogical Scenario provides the ordering of
the Learning Activities contained in its Structure. By
default, the Reference Scenario does not provide an
order in which to execute the Learning Activities.
The ordering of activities is not necessarily lin-
ear. For example, one may establish a pedagogical
decision to provide the learner with a choice every
time, or only in some cases. In non-linear scenar-
ios, the definition of pedagogical prerequisites is an
important specification that allows the learner to go
from one Learning Activity to the next in a logical
order. Such prerequisites may include the validation
of other Learning Activities, or the validation of an
Assessment above certain a threshold.
Functional prerequisites are indicative prerequi-
sites regarding the state of the VE. For example,
the “welding practice” Learning Activity requires the
“preparation of the welding station” Learning Activ-
ity to be performed beforehand. However, the Do-
main Expert can always decide that the latter Learn-
ing Activity is not to be performed by the learner, but
is assumed to be performed correctly. In such case,
the application must handle the prerequisites directly
instead of the learner, in order to begin the “welding
practice” Learning Activity in the correct conditions.
3.4.2 Error Handling
Pedagogical Scenarios handle the triggering of Er-
ror Scenarios according to pedagogical decisions.
Through this process, a Pedagogical Scenario can
modify or block the execution of an Error Scenario.
Taking the example of welding training detailed in
Section 4, “welding without a welding helmet” is an
error that deviates from an ILO on compliance with
safety measures during practice. Indeed, this error
represents a serious risk for the learner’s eyesight in
real-life situations. This error can be handled in mul-
tiple ways. The scenario can prevent the error from
happening by blocking the interactions susceptible to
causing it. It can also display an informative message
Handing Pedagogical Scenarios Back over to Domain Experts: A Scenario Authoring Model for VR with Pedagogical Objectives
109

when the Error Scenario is triggered, or, it can illus-
trate the consequences that would unfold. In the latter
case, the Pedagogical Scenario manages the error by
deciding not to intervene in its resolution.
3.4.3 Pedagogical Guidance
We define Pedagogical Guidance as elements that ori-
ent the learning process and are superfluous to an ex-
pert in the learning domain. They encompass ele-
ments such as instructions, feedback, or interaction
management. Consequently, they rely on the Peda-
gogical Specifications to inform their content. Peda-
gogical Guidance is used as an interface between Ped-
agogical Scenarios and the VE.
The activation of Pedagogical Guidance depends
on the scenario. For example, it may be active at all
times, triggered by an Assessment, or react to the trig-
gering of an Error Scenario. Conversely, interacting
with Pedagogical Guidance may trigger progression
of the scenario. It should be noted that the actions
of Pedagogical Guidance are not only additive. Pre-
venting actions and events is also an important role of
Pedagogical Guidance. Most notably, this might take
the form of blocking actions in order to prevent errors.
Pedagogical Guidance plays an intermediate ped-
agogical role, as illustrated in the detailed view of the
model (Figure 5). It is a key part of Pedagogical Sce-
narios, but can also be triggered by the Domain Ex-
pert through the Monitoring Component. In addition,
fostering learner autonomy is a recurring Pedagogical
Objective; therefore Pedagogical Guidance can also
be requested directly by the learner to provide control
over the learning process.
3.5 Monitoring
The Monitoring Component allows an external user to
monitor the VET and act upon it. The characteristics
of VETs make it difficult for the Domain Expert to
monitor the progress of a learner using a VR device.
Providing a video feed might not be sufficient for cor-
rect monitoring and does not scale well for multiple
learners. Thus, the monitoring process needs to pro-
vide other information. The Monitoring Component
observes the state of the VE, progression within the
scenarios, and the validation of ILOs, as illustrated
in Figure 5. It provides the Domain Expert with in-
formation that directly derives from the measurement
of the learner’s progress. In addition, the Monitor-
ing Component can also provide help and guidance to
the learner at runtime, without leaving the VE. The
Monitoring Component can interact directly with the
VE, but also provides the means of triggering Assess-
ments and Pedagogical Guidance if needed. It bridges
the gap between the immersive virtual environment
and the “outside world”. It introduces possibilities
for asymmetric modes of collaboration due to its abil-
ity to monitor learners’ performance and act upon the
VE. Such collaborations could take place between the
learner and the Domain Expert or between multiple
learners.
4 USE CASE
To assess the viability of our model, we applied it
to a real use case of a VR training course. The use
case was designed in collaboration with Domain Ex-
perts who teach introductory courses on welding the-
ory and practice to undergraduate students. These
courses constitute an introduction to industrial pro-
cesses and risk management as part of an engineering
curriculum.
The Domain Experts are involved in a develop-
ment project to create a VR training application that
helps teach safety and welding basics before actual
welding practice. In parallel with its development,
we had the opportunity to implement our model’s ap-
proach within this application and gather feedback
from the Domain Experts.
4.1 Welding Training Application in VR
The welding training application teaches safety prac-
tices and introductory notions for Metal Inert Gas
(MIG) welding – a type of Gas Metal Arc Weld-
ing (GMAW) that uses an electric arc to provoke the
fusion of metal. The application contains an error-
spotting environment (Figure 1a) and a welding prac-
tice environment (Figure 1b). The error-spotting en-
vironment is designed to help identify clothing that is
unsuited for safe welding practice, and risks posed by
loose hair. The second environment features a func-
tional MIG welding station, welding material, and
safety equipment. The learner can interact with Per-
sonal Protective Equipment (PPE), set up the welding
station, and perform a weld on a simple metal plate.
4.2 Implementation
The welding training application is being developed
with Unity 2021. This preexisting code basis fea-
tures ecological interactions with welding material
and two environments (Figure 1). Additional Peda-
gogical Guidance was developed and integrated into
the environment to answer the needs of the Pedagog-
ical Scenarios.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
110
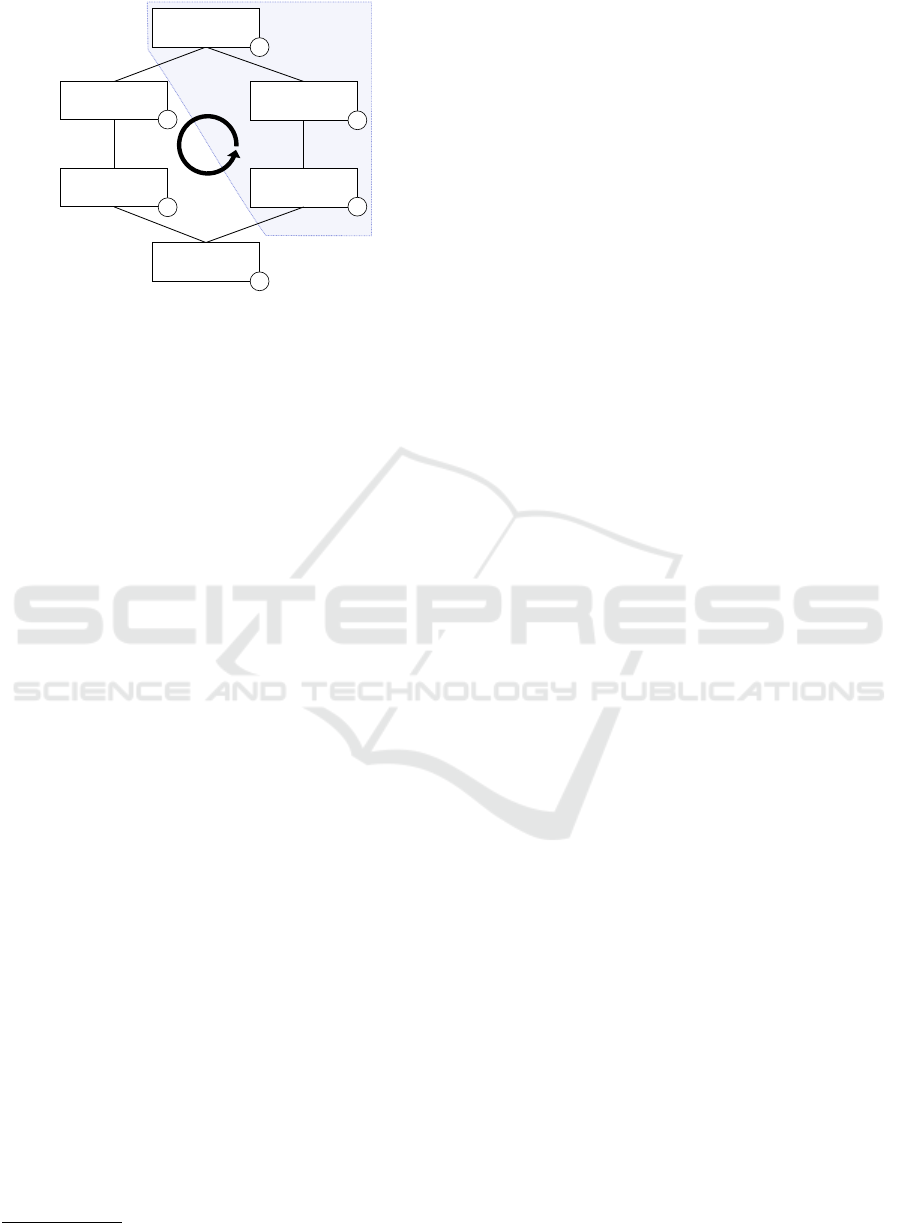
STRUCTURE
ILO
Training
Course
Learning
Activity
Module
Pedagogical
Objectives
Assessment
1
2
3
4
5
6
Figure 6: Pedagogical Specifications writing protocol.
The model was implemented using Xareus
1
, a
Petri net-based scenario engine (Bouville et al., 2015;
Claude et al., 2014), and C# classes. The Pedagogical
Specifications (Figure 4) are represented in C# and
instantiated from the application’s Pedagogical Spec-
ifications written in natural language. Their instanti-
ation allows the construction of objects representing
the focus of a Pedagogical Scenario (Figure 5). The
scenarios, including the Learning Activities content,
were created with Xareus’ visual authoring interface
for no-code approaches. In addition, Xareus’ sen-
sors/effectors logic was extended with the automatic
activation of the relevant scenario sections based on
the content of a given scenario focus parameter.
4.3 Model Application
Our scenario authoring model was applied to the
welding training application in accordance with the
Domain Expert’s authoring process (Figure 6). First,
this requires the definition of the Pedagogical Spec-
ifications. Second, these specifications are used to
author the Reference Scenario and Error Scenarios.
Finally, two Pedagogical Scenarios were proposed to
show the possibilities of our model.
4.3.1 Reference Scenario
The Reference Scenario uses Pedagogical Specifica-
tions to align the VET with the Pedagogical Objec-
tives. This allows for the automation of the relations
between the specifications and facilitates authoring.
For example, selecting an ILO subset disables the
Learning Activities that do not serve to achieve them.
The specifications were written using a six-step proto-
col (Figure 6) based on Constructive Alignment (Fig-
ure 4). Following the validation of the specifications
1
https://xareus.insa-rennes.fr/
by Domain Experts, minor corrections were made to
the welding practice ILOs.
Five ILOs were identified for this application.
• ILO
1
: Identification of safe welding clothing
among a panel of virtual humans.
• ILO
2
: Choosing and wearing suitable PPE.
• ILO
3
: Preparation of the welding station.
• ILO
4
: Application of safety instructions during
welding practice.
• ILO
5
: Basic welding practice.
A detailed description of ILO
5
is presented in Table 1.
Each ILO contains a validation value made accessible
to the Assessments and the Monitoring Component.
The Reference Scenario then exposes each VET’s
aspect monitored by the Assessments of the ILOs. For
example, the ILO
2
Assessment records the interac-
tions of the learner with PPE. It expects the apron,
welding helmet, and gloves to be in an “equipped”
state and to have been equipped in this order. Thus,
the Reference Scenario provides a procedural descrip-
tion of the actions and access to the states of the PPE.
Finally, three Learning Activities (LA) were de-
vised using the ILOs and Assessments.
• LA
1
: Identification of safe welding clothing.
• LA
2
: Preparation of the welding station in accor-
dance with the safety measures.
• LA
3
: Basic welding practice.
Each Learning Activity knows the Assessments it
implements and thus transitively knows the ILOs it
serves to achieve. The Reference Scenario segments
the Assessments’ validations into sections represent-
ing their Learning Activity. Each section can be easily
enabled or disabled without impacting the others.
4.3.2 Error Scenarios
In this use case, most Error Scenarios are used to no-
tify the VET. For example, in LA
3
touching a burning
metal plate is a fatal error. Representing its conse-
quences was deemed unnecessary, but it does not pre-
vent Pedagogical Scenarios from handling the Error
Scenario using Pedagogical Guidance.
Some cases are better suited to represent the con-
sequences of errors. If the welding action is triggered
while the gas bottle is in the “closed” state, the Error
Scenario increases the production of sparks and de-
grades the quality of the weld. In addition, if the state
of the gas bottle changes to “open”, the scenario stops
and allows the learner to return to the Reference Sce-
nario. This case supports the enabling or disabling of
consequences based on the needs of the Pedagogical
Scenarios.
Handing Pedagogical Scenarios Back over to Domain Experts: A Scenario Authoring Model for VR with Pedagogical Objectives
111

4.3.3 Pedagogical Scenarios
This use case contains two Pedagogical Scenarios
to illustrate the capabilities of the model – a safety-
focused scenario and a practice-focused scenario.
The safety-focused scenario introduces safety no-
tions to the learner using a significant amount of Ped-
agogical Guidance. It makes use of the three Learn-
ing Activities. At the end of each activity, the Ped-
agogical Scenario informs the Reference Scenario of
the next activity to be performed. This scenario pro-
vides instruction and corrective feedback to validate
safety ILOs. For example, in LA
2
, it triggers instruc-
tional guidance in the form of a checklist, highlights
PPE entities, and provides dynamic textual feedback
if components of PPE are missing or equipped in the
wrong order. This Pedagogical Scenario does not
evaluate ILO
3
“Preparation of the welding station”.
Consequently, the scenario handles the preparation of
the welding station by changing the state of the rele-
vant elements. In LA
3
, the Pedagogical Scenario fea-
tures the handling of Error Scenarios. The learner can
test the welding torch while dangerous interactions
are blocked with explanatory feedback. This prevents
the activation of the torch while the welding helmet is
not lowered, for example.
The practice-focused scenario is oriented toward
teaching welding practice and the preparation of a
MIG welding station. It uses only LA
2
and LA
3
and
disables LA
1
. In this scenario, LA
2
explicitly eval-
uates the preparation of the welding station and im-
plicitly expects compliance with safety measures. It
uses Pedagogical Guidance to prevent welding until
all preparation steps have been completed. Addition-
ally, it does not indicate nor enforce safety-related As-
sessments, although failure to apply safety measures
triggers an alert via the Monitoring Component. Fi-
nally, LA
3
uses dynamic Pedagogical Guidance in the
form of a “ghost” of the welding torch (Figure 7) to
demonstrate the expected speed, height, and angle pa-
rameters. It helps with the achievement ILO
5
(Ta-
ble 1). This activity also provides the learner with the
possibility to display informative graphics as optional
guidance.
4.4 Discussion with Domain Experts
This section reports feedback on the acceptance of the
authoring model from three Domain Experts. Two
of them are welding teachers with no VR experience,
and one is a pedagogical expert familiar with VR de-
velopment using no-code approaches. The discussion
followed a qualitative guided interview. Before and
after the model presentation, Domain Experts were
Figure 7: Pedagogical Guidance in the form of a welding
torch ghost and weld quality feedback.
asked to express the pedagogical objectives, specifi-
cations, and scenarios they considered necessary to
create the use case. Then, they were asked about their
reported confidence and motivation to use the compo-
nents of the model. Finally, they were given the op-
portunity to comment on the relevancy of the model.
Domain Experts reported feeling confident in
writing each type of Pedagogical Specifications (Fig-
ure 6). One reported a strong interest in Construc-
tive Alignment, as it allows for introspection on the
learning material and evaluations. It should be noted
that two experts already had intermediate knowledge
in terms of describing learning outcomes with OAVs.
When asked about directly authoring a scenario,
Domain Experts reported irresolute confidence in
writing and high confidence in editing. Welding
teachers did not feel confident writing Pedagogical
Scenarios without the support of a pedagogical ex-
pert. They reported having a “one scenario per stu-
dent” approach, and not being in a scenario authoring
mindset. Conversely, the pedagogical expert felt con-
fident in writing scenarios using our model and ex-
pressed interest in using it for professional projects.
Higher levels of confidence were reported for edit-
ing pre-existing Pedagogical Scenarios. Domain Ex-
perts were interested in the possibility of selecting and
potentially editing a scenario just before a training
session, for example, by choosing only the relevant
Learning Activities and Assessments.
The capabilities of a model with multiple Peda-
gogical Scenarios were of great interest to the Domain
Experts, particularly to allow for adaptation to differ-
ent categories of learners. When presented with this
possibility, they suggested using Pedagogical Scenar-
ios to provide more guidance to foreign students or to
gradually increase the level of difficulty.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
112

5 DISCUSSION
This section discusses the capabilities of the model
based on the feedback from Domain Experts (Sec-
tion 4.4). They reported high motivation and feeling
confident in using the model in its entirety, showing a
promising acceptance of its principles.
Domain Experts’ confidence in authoring scenar-
ios highlighted potential difficulties in understanding
VR scenarios without pedagogical expertise or exam-
ples. On the other hand, Pedagogical Specifications
authoring received a high level of confidence. This
shows the importance of the model’s specifications to
provide a common language understandable by both
Domain Experts and VR experts. While complete au-
thoring might require additional guidance, Domain
Experts exhibited a keen interest and confidence in
editing pre-existing scenarios. This interest extends
after the development phase, suggesting that the VET
can become a more time-resilient educational tool.
This work assumes the existence of a simplified
authoring interface for Domain Experts. Such an in-
terface is not the focus of this paper as its implemen-
tation would require its own pedagogical decisions.
Nonetheless, we consider it beneficial for scenario
editing and generating code-based specifications.
Domain Experts identified the adaptation to differ-
ent learner categories as an advantage of using multi-
ple Pedagogical Scenarios. Extending the model with
the authoring of automatic adaptation would provide
Domain Experts with adaptive authoring tools that
can inspire new ways of thinking about teaching.
6 CONCLUSION
This paper proposed a scenario authoring model for
VET to respond to a lack of solutions providing Do-
main Experts with hands-on control over the peda-
gogical scenario authoring of VETs. It described how
the integration of Constructive Alignment principles
can shape VET design to guarantee the validation of
Pedagogical Objectives. It then proceeded to explain
the three types of scenarios used by the model. This
separation of scenario roles allows for the authoring
of multiple Pedagogical Scenarios by separating the
learner’s Assessment from pedagogical decisions.
Following the description of the model, its capa-
bilities were illustrated through a use case pertaining
to a welding training application. While an overall as-
sessment of the model is a difficult task, discussions
with Domain Experts revealed high levels of interest
in its use. In particular, for its learner progress mon-
itoring, authoring of multiple pedagogical scenarios,
and editing capabilities.
Future work should aim to expand scenario adap-
tation to learners. Notably, the addition of dynamic
pedagogical scenario changes and scenario blending
should be investigated. Further integration of Ped-
agogical Specifications could lead to the automated
generation of a VET skeleton for the benefit of VR de-
velopment. Finally, the high-level nature of the model
opens up its extension to Collaborative Virtual Envi-
ronments and to the eXtended Reality (XR) contin-
uum.
ACKNOWLEDGEMENTS
This work has benefited from state aid managed by
the “Agence Nationale de la Recherche” under the
“Investissements d’Avenir” program under the refer-
ence ANR-21-DMES-0001.
We want to thank the AIR Project pedagogical en-
gineer and INSA Rennes’ teachers for their participa-
tion in the model discussion.
REFERENCES
Amokrane, K., Lourdeaux, D., and Burkhardt, J.-M. (2008).
Hera: Learner tracking in a virtual environment. Int.
J. Virtual Real., 7(3):23–30.
Anderson, L. W. and Krathwohl, D. R. (2001). A taxon-
omy for learning, teaching, and assessing: A revision
of Bloom’s taxonomy of educational objectives: com-
plete edition. Addison Wesley Longman, Inc., New
York, complete edition.
Ashtari, N., Bunt, A., McGrenere, J., Nebeling, M., and
Chilana, P. K. (2020). Creating augmented and virtual
reality applications: Current practices, challenges,
and opportunities. In Proceedings of the 2020 CHI
Conference on Human Factors in Computing Systems,
page 1–13, Honolulu HI USA. ACM.
Biggs, J. (1999). Teaching for Quality Learning at Univer-
sity: What the Student Does. SRHE and Open Univer-
sity Press imprint. Society for Research into Higher
Education.
Biggs, J. B. and Collis, K. F. (1982). Evaluating the qual-
ity of learning: the SOLO taxonomy (structure of the
observed learning outcome). Educational psychology.
Academic Press, New York.
Biggs, J. B. and Tang, C. S.-k. (2011). Teaching for quality
learning at university: what the student does. SRHE
and Open University Press imprint. McGraw-Hill, So-
ciety for Research into Higher Education & Open Uni-
versity Press, Maidenhead, England New York, NY,
4th edition.
Bouville, R., Gouranton, V., Boggini, T., Nouviale, F., and
Arnaldi, B. (2015). #five : High-level components for
Handing Pedagogical Scenarios Back over to Domain Experts: A Scenario Authoring Model for VR with Pedagogical Objectives
113

developing collaborative and interactive virtual envi-
ronments. In 2015 IEEE 8th Workshop on Software
Engineering and Architectures for Realtime Interac-
tive Systems (SEARIS), page 33–40, Arles, France.
IEEE.
Bowman, D. A., Hodges, L. F., Allison, D., and Wineman,
J. (1999). The educational value of an information-
rich virtual environment. Presence: Teleoperators and
Virtual Environments, 8(3):317–331.
Buche, C., Bossard, C., Querrec, R., and Chevaillier, P.
(2010). Pegase: A generic and adaptable intelligent
system for virtual reality learning environments. In-
ternational Journal of Virtual Reality, 9(22):73–85.
Buche, C., Querrec, R., de Loor, P., and Chevaillier, P.
(2004). Mascaret: A pedagogical multi-agent sys-
tem for virtual environment for training. International
Journal of Distance Education Technologies, 2:41–61.
Claude, G., Gouranton, V., and Arnaldi, B. (2015). Roles
in collaborative virtual environments for training. In
Imura, M., Figueroa, P., and Mohler, B., editors, Pro-
ceedings of International Conference on Artificial Re-
ality and Telexistence Eurographics Symposium on
Virtual Environments , pages 1–8, Kyoto, Japan.
Claude, G., Gouranton, V., Bouville Berthelot, R., and Ar-
naldi, B. (2014). Short paper: #seven, a sensor ef-
fector based scenarios model for driving collaborative
virtual environment. In Nojima, T., Reiners, D., and
Staadt, O., editors, ICAT-EGVE, International Con-
ference on Artificial Reality and Telexistence, Euro-
graphics Symposium on Virtual Environments, page
1–4, Bremen, Germany.
Dalgarno, B. and Lee, M. J. W. (2010). What are the learn-
ing affordances of 3-d virtual environments? British
Journal of Educational Technology, 41(1):10–32.
Garz
´
on, J., Kinshuk, Baldiris, S., Guti
´
errez, J., and Pav
´
on,
J. (2020). How do pedagogical approaches affect the
impact of augmented reality on education? a meta-
analysis and research synthesis. Educational Research
Review, 31:100334.
Gerbaud, S., Mollet, N., Ganier, F., Arnaldi, B., and Tis-
seau, J. (2008). Gvt: a platform to create virtual
environments for procedural training. In 2008 IEEE
Virtual Reality Conference, page 225–232, Reno, NV,
USA. IEEE.
Horst, R., Naraghi-Taghi-Off, R., Rau, L., and Do-
erner, R. (2022). Authoring with virtual reality
nuggets—lessons learned. Frontiers in Virtual Real-
ity, 3:840729.
Johnson, W. L. and Rickel, J. (1997). Steve: an animated
pedagogical agent for procedural training in virtual
environments. ACM SIGART Bulletin, 8(1–4):16–21.
Koper, R., Olivier, B., and Anderson, T. A. (2003). Ims
learning design specification (version 1.0).
Lanquepin, V., Carpentier, K., Lourdeaux, D., Lhommet,
M., Barot, C., and Amokrane, K. (2013). Humans: a
human models based artificial environments software
platform. In Proceedings of the Virtual Reality Inter-
national Conference: Laval Virtual, page 1–8, Laval
France. ACM.
Marion, N., Querrec, R., and Chevaillier, P. (2009). Inte-
grating knowledge from virtual reality environments
to learning scenario models - a meta-modeling ap-
proach. In Proceedings of the First International Con-
ference on Computer Supported Education, volume 1,
page 253–258, Lisboa, Portugal. SciTePress - Science
and Technology Publications.
Mikropoulos, T. A. and Natsis, A. (2011). Educational
virtual environments: A ten-year review of empiri-
cal research (1999–2009). Computers & Education,
56(3):769–780.
Piaget, J. (1950). The psychology of intelligence. Rout-
ledge, New York.
Porteous, J., Cavazza, M., and Charles, F. (2010). Applying
planning to interactive storytelling: Narrative control
using state constraints. ACM Transactions on Intelli-
gent Systems and Technology, 1(2):1–21.
Radianti, J., Majchrzak, T. A., Fromm, J., and Wohlge-
nannt, I. (2020). A systematic review of immersive
virtual reality applications for higher education: De-
sign elements, lessons learned, and research agenda.
Computers & Education, 147:103778.
Richard, K., Havard, V., His, J., and Baudry, D. (2021). In-
tervales: Interactive virtual and augmented framework
for industrial environment and scenarios. Advanced
Engineering Informatics, 50:101425.
Schunk, D. H. (2012). Learning theories: an educational
perspective. Pearson, Boston, 6th ed edition.
Udeozor, C., Chan, P., Russo Abeg
˜
ao, F., and Glassey, J.
(2023). Game-based assessment framework for vir-
tual reality, augmented reality and digital game-based
learning. International Journal of Educational Tech-
nology in Higher Education, 20(1):36.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
114
