
SynthRSF: A Novel Photorealistic Synthetic Dataset for Adverse
Weather Condition Denoising
Angelos Kanlis
a
, Vazgken Vanian
b
, Sotiris Karvarsamis
c
, Ioanna Gkika
d
,
Konstantinos Konstantoudakis
e
and Dimitrios Zarpalas
f
Visual Computing Lab (VCL), Information Technologies Institute (ITI),
Centre for Research and Technology - Hellas (CERTH), Thessaloniki, Greece
Keywords:
Synthetic Dataset, Image Restoration, Adverse Weather Conditions, Semantic Segmentation, Depth
Estimation, Benchmarking, Unreal Engine.
Abstract:
This paper presents the SynthRSF dataset for training and evaluating single-image rain, snow and haze de-
noising algorithms, as well as evaluating object detection, semantic segmentation, and depth estimation per-
formance in noisy or denoised images. Our dataset features 26, 893 noisy images, each accompanied by its
corresponding ground truth image. It further includes 13, 800 noisy images accompanied by ground truth,
16-bit depth maps and pixel-accurate annotations for various object instances in each frame. The utility of
SynthRSF is assessed by training unified models for rain, snow, and haze removal, achieving good objective
metrics and excellent subjective results compared to existing adverse weather condition datasets. Further-
more, we demonstrate its use as a benchmark for the performance of an object detection algorithm in weather-
degraded image datasets.
1 INTRODUCTION
Creating scene understanding models has become a
central goal in both computer vision research and as-
sociated industrial applications. Such tasks can in-
volve object detection, segmentation, depth estima-
tion, as well as more complex procedures. However,
adverse conditions such as rain, snow and haze, as
well as variable lighting conditions, can impact the
performance of such algorithms by degrading the vi-
sual data. This can affect a wide range of applications,
such as autonomous driving, surveillance, robotics,
computer-assisted search-and-rescue, and more.
Due to the practical constraints of collecting
rain, snow and haze-specific data with an associated
ground truth at real-world sites, as well as the diffi-
culty of defining the ground truth scene at a later time,
when lighting and other variables have changed, sig-
nificant research effort has been devoted to generating
synthetic datasets for rain, snow and haze.
a
https://orcid.org/0009-0005-0836-9325
b
https://orcid.org/0000-0002-2150-3446
c
https://orcid.org/0000-0002-5302-3711
d
https://orcid.org/0000-0001-7340-3079
e
https://orcid.org/0000-0001-5092-8796
f
https://orcid.org/0000-0002-9649-9306
Although some datasets use a synthetic noise layer
superimposed on real world images, the result often
appears flat and unconvincing to a human observer.
Furthermore, by simply layering weather noise on top
of an image, one does not account for the effect of
the weather phenomenon on the landscape nor the ef-
fect of existing lighting conditions on the appearance
of the weather phenomenon itself. For these reasons,
deep learning models trained on such datasets often
perform poorly in real-world conditions, as the do-
main gap between the training set and the actual input
in an application is significant.
A solution to the above would be a photorealis-
tic synthetic dataset including adverse weather effects
as 3D effects fully integrated in a scene. In recent
years, modern game engines are capable of producing
highly realistic scenes, incorporating not only objects,
weather effects and lighting, but also their interaction.
Renders from such scenes can comprise multiple ver-
sions of the same view, including ones with adverse
weather conditions of various types and intensities, as
well as clear ground-truth images.
This paper presents SynthRSF (Synthetic with
Rain, Snow and Fog), a novel, photorealistic,
synthetic dataset focused on incorporating adverse
weather conditions, created using the Unreal 5.2 game
Kanlis, A., Vanian, V., Karvarsamis, S., Gkika, I., Konstantoudakis, K. and Zarpalas, D.
SynthRSF: A Novel Photorealistic Synthetic Dataset for Adverse Weather Condition Denoising.
DOI: 10.5220/0012397700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
567-574
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
567

engine. SynthRSF is based on 14 3D scenes, of var-
ious sizes (from indoor rooms to entire cities) set in
various environments (urban day, urban night, inte-
rior, nature), within which the camera moves on a
virtual rig, rendering images containing various types
of noise: snow, rain, uniform and non-uniform fog.
Each noisy frame is accompanied by the correspond-
ing ground truth image, for training denoising models.
To showcase SynthRSF’s added value in visual
computing research, a series of experiments has
been conducted, using it to train the state-of-the-
art TransWeather (Valanarasu et al., 2022) adverse
weather noise removal model. As a training dataset,
SynthRSF exhibits promising performance compared
to existing adverse weather datasets, and beyond
state-of-the-art performance when used in combina-
tion with some existing datasets. In addition, a human
subjective evaluation survey is performed, using real-
world images. Results provide compelling evidence
that when training models with photorealistic data,
denoising results are consistently deemed preferable
by human observers.
Furthermore, SynthRSF comes with an additional
multi-modal expansion dataset, named SynthRSF-
MM. The multi-modal dataset contains 14 scenes,
with pixel-level annotations for 5 object instances per
scene, and 41 object classes that are included in total.
With its additional modalities, it can be used as a train
and/or test dataset in a wider range of computer vi-
sion tasks, such as object detection, image segmenta-
tion, depth estimation, and scene understanding, with
possible applications in autonomous driving, robotics,
search-and-rescue, and more.
Hence, the main contributions of this paper can be
summarised as follows:
• the SynthRSF dataset, a synthetic photorealis-
tic dataset incorporating 3D weather effects and
lighting, comprising 26,893 pairs of images (de-
graded with adverse weather and ground truth).
SynthRSF, along with its expansion (see next bul-
let) is available on the Git repository
1
.
• the SynthRSF-MM expansion, an additional
13,800 pairs with ground truth on additional
modalities: depth map, semantic segmentation,
and bounding box pixel coordinates for 39 classes.
• a novel Dataset creation methodology based
on the Unreal 5.2 game engine, leveraging 3D
models and effects and predefined virtual camera
paths, used to create SynthRSF/SynthRSF-MM.
• a set of Experiments comparing SynthRSF to
previously published adverse weather datasets in
training image restoration models.
1
https://github.com/VCL3D/SynthRSF
2 RELATED WORK
2.1 Unified Weather Denoising Models
Weather denoising research has recently undergone a
shift from earlier optimization-based techniques, of-
ten requiring priors that are tailored to specific types
of weather conditions, to deep-learning approaches
(Yang et al., 2019) can be used to model multiple phe-
nomena. The introduction of CNNs and GANs (Ren
et al., 2020) has significantly enhanced denoising ca-
pabilities.
So far, the fraction of works on unified deraining,
desnowing and dehazing is still significantly smaller
than the research work on rain, snow or haze in
isolation. However, very recently, multiple meth-
ods have emerged that follow a unified approach
(Valanarasu et al., 2022), (
¨
Ozdenizci and Legenstein,
2022), (Wang et al., 2023), (Chen et al., 2022), (Kar-
avarsamis et al., 2022a). The authors of (Li et al.,
2020) are one of the first to handle multiple weather
degradations using a single network. The model is
based on CNNs and consists of multiple weather-
specific encoders and a single common decoder.
(Valanarasu et al., 2022) proposes a single
encoder-decoder architecture based on transformers
and uses weather queries to handle multiple adverse
weather conditions. A novel transformer-based block
is also proposed improving the networks’ perfor-
mance. (Wang et al., 2023) is another work based
on transformers. To improve the learning capabili-
ties and efficiency of the model, transformers-based
blocks are used in a grid structure. The approach pro-
posed by (
¨
Ozdenizci and Legenstein, 2022) is based
on denoising diffusion-based methods, introducing a
patch based diffusive restoration architecture enabling
arbitrary sized image processing.
2.2 Datasets Based on Real Images with
Synthetic Weather Effects
For each single phenomenon denoising task, most
methods use one or more of the following datasets,
which have been documented in (Yang et al., 2020)
and (Karavarsamis et al., 2022b).
For removing rain, datasets like Rain12600 (Fu
et al., 2017) and Rain12000 (Zhang and Patel, 2018)
have been widely used while similarly for snow,
Snow-100K (Liu et al., 2018) and CSD (Chen et al.,
2021) among others. When it comes to haze, notable
datasets include I-HAZE (Ancuti et al., 2018a) and
O-HAZE (Ancuti et al., 2018b). Recently, a novel
technique was published (Ba et al., 2022) for gener-
ating ground truth for rainy images. However, similar
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
568

approaches for other important weather conditions are
still missing in the scientific literature.
2.3 Fully Synthetic Game Engine
Datasets
There is a significant amount of fully synthetic
datasets generated in game engines such as Blender
and Unity 3D. Important milestones include SceneNet
(A Handa, 2016) containing annotated 3D scenes
that can generate unlimited ground truth training
data, (Richter et al., 2016) who use game interac-
tion with graphics hardware to generate labeled data
and (Mayer et al., 2016) who provide a stereo video
dataset to estimate disparity and scene flow. Fur-
thermore, (Butler et al., 2012) create an optical flow
dataset derived from a 3D animated short film. To our
knowledge, weather noise has not been implemented
in any fully synthetic game engine datasets.
3 THE SYNTHRSF DATASET
3.1 Design
The design goal of SynthRSF is to create a collec-
tion of photorealistic image pairs in different types of
environments, of weather-degraded images and their
corresponding clear ground-truth image.
This is achieved by adding 3D weather effects
simulating rain, snow and fog to realistic 3D Scenes.
This way, included weather noise can be parameter-
ized into numerous combinations resulting in a wide
range of visibility conditions.
Simulating real-life fog is particularly interesting,
since it is both a cause of occlusion and simultane-
ously it interacts with existing light sources, increas-
ing the illumination of parts of the scene. This type
of simulation,
2 3
has now been made possible with
state-of-the-art game engines.
3.2 Environment
The content environment of SynthRSF is based on 14
3D scenes designed in the Unreal 5.2 game engine
4
Scenes are sourced from the Unreal Engine’s doc-
umentation, including Unreal’s City Sample Project
and Hillside Project, which contribute most of the im-
ages of the dataset, due to the quality and variety of
the 3D assets contained. Other scenes are sourced
2
Lumen Global Illumination
3
Volumetric Fog
4
http://www.unrealengine.com/
from the documentation and the Unreal Marketplace,
all detailed on the SynthRSF Git repository
1
These scenes simulate a variety of environment
and lighting characteristics: urban/rural, day/night,
indoor/outdoor, wet/snowy, captured by a virtual
camera moving along set paths. Aiming for high vi-
sual realism, interior scenes do not include snow or
rain noise, but do include uniform or non-uniform
fog, as it approximates light smoke and can be use-
ful in emergency response applications.
Scenes 1–5 are divided into training (67%) and
test sets (33%). without risking data leakage, as the
camera does not revisit the same locations. Scenes
6-14 are entirely in the training set.
SynthRSF provides 26, 893 weather images of
rain, snow, uniform fog and non-uniform fog. This
novel addition of non-uniform fog is the reason for its
name including “fog” rather than “haze”. All images
are accompanied by their ground-truth pairs.
3.3 Weather Effect Implementation
Snow and rain are simulated in a virtual scene by
combining elements: Particles (sprites from Unreal’s
Niagara System) that represent close to medium-
distance occlusion and a fog component that sim-
ulates precipitation-induced light diffusion in larger
distances. Particle dimensions, velocity, angle, pop-
ulation and fog density are assigned sinusoidal func-
tions with different periods. Over enough time, all
their possible combinations are represented. Uniform
fog is created by Unreal Engine’s ExponentialHeight-
Fog module, while non-uniform fog was generated
using the Unreal’s Legacy particle system.
Blueprint functions for the snow and rain effects
as well as the custom rendering preset are included in
Git
1
3.4 SynthRSF-MM (Multi-Modal) Set
3.4.1 Motivation and Functionality
In 3D game engines, native data on each asset is avail-
able, hence additional ground-truth modalities can be
included in each sample.
SynthRSF-MM is an expansion to SynthRSF,
containing fewer samples but including additional
ground-truth modalities (depth, segmentation, and
object bounding boxes). It features 13, 800 noisy
images generated from 14 Unreal-Engine-sourced
scenes. SynthRSF-MM’s scenes have been manu-
ally populated with 39 classes of 3D objects, includ-
ing persons, vehicles, animals, etc. Subsequently,
3D rain, snow and fog effects are added to the
SynthRSF: A Novel Photorealistic Synthetic Dataset for Adverse Weather Condition Denoising
569

(a) Ground truth (b) Depth map (c) Semantic segmentation
(d) Fog (e) Rain (f) Snow
Figure 1: A sample scene from SynthRSF-MM. For each Ground truth image, there is one depth map, five pixel-level anno-
tations and 8 noisy images per phenomenon.
scene. Each image is accompanied by a 16-bit depth
map, pixel-accurate segmentation per object instance,
YOLO-compatible bounding box .json files.
Due to the manual labour involved, 825 unique
static camera views were set up, and 8 noisy images
per phenomenon (rain, snow, fog), per view, were
generated. Indoor scenes feature fog noise only.
Object detection bounding boxes are available for
calculating the accuracy of an object detection task.
SynthRSF-MM includes 39 of the YOLOv8
5
object
detector classes. Occluded objects with fewer than
100 pixels appearing on an image are not being allot-
ted a bounding box.
Having ground truth metadata, SynthRSF-MM
can be used in tasks besides image restoration, such as
semantic segmentation, object detection and distance
estimation, both in clear and degraded conditions.
4 EXPERIMENTS
In testing SynthRSF and comparing it to previous
datasets, TransWeather, a widely used state-of-the-art
deep learning model for weather noise removal is em-
ployed. Experiments compare the results of Trans-
Weather when trained by its default training dataset
(AllWeather), SynthRSF, or a combination of both.
Three different experiments were conducted:
1. Objective: PSNR and SSIM metrics.
2. Subjective comparison on real adverse weather
images.
5
https://github.com/ultralytics/ultralytics
3. Object detection: This experiment compares the
efficiency of YoloV8 on images restored by Trans-
Weather, trained on different datasets.
4.1 Training an Image Restoration
Network for Adverse Weather
Conditions
4.1.1 Architecture Selection
SynthRSF is suitable for unified bad weather removal
architectures (i.e. “all-in-one” models that can re-
move multiple weather conditions). The presence
of such publicly available models is rather limited.
Three publicly available unified models were iden-
tified and tested: TransWeather (Valanarasu et al.,
2022), WeatherDiffusion (
¨
Ozdenizci and Legenstein,
2022), and AirNet (Li et al., 2022). Out of these,
TransWeather features good robustness combined
with a relatively fast training process; WeatherDiffu-
sion, although superior in quality, is extremely slow
both in training and inference, as also stated in the
publication itself; and AirNet proved to be unstable at
times due its contrastive learning approach.
Hence, the decision was made to employ Trans-
Weather alone to conduct our experiments, allow-
ing multiple training iterations and testing on tens of
thousands of samples.
4.1.2 Training and Testing Datasets
In the original publication, TransWeather is trained on
the AllWeather dataset, a combination of Snow100K
(Liu et al., 2018), Outdoor-Rain (Li et al., 2019) and
RainDrop (Qian et al., 2018) which contain images
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
570
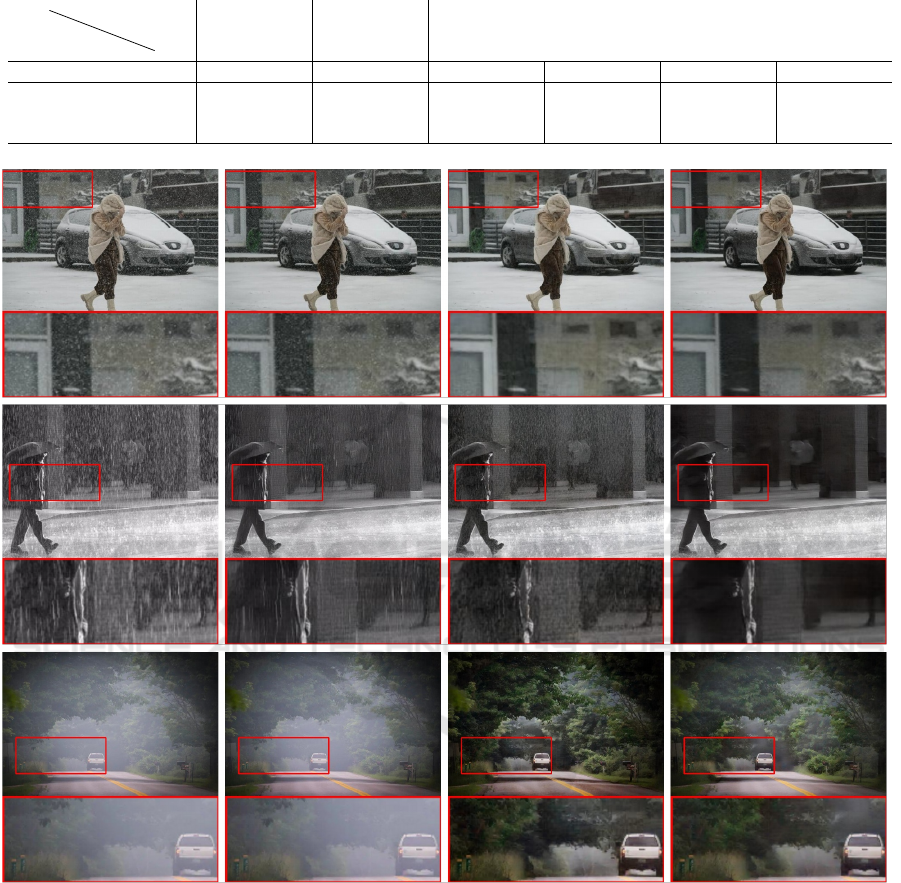
Table 1: Quantitative results based on PSNR and SSIM for TransWeather trained on AllWeather, SynthRSF, their combination
and tested on Snow100K-L, test1 and SynthRSF test sets.
Train
Test
Snow100K-L
(AllWeather
snow)
test1
(AllWeather
rain and fog)
SynthRSF
Snow
SynthRSF
Rain
SynthRSF
Fog
Average
PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM
AllWeather 28.08 0.86 27.17 0.87 24.83 0.79 24.33 0.73 20.07 0.73 24.90 0.80
SynthRSF 19.85 0.69 15.33 0.60 27.68 0.85 27.89 0.83 25.17 0.82 23.18 0.76
AllWeather + SynthRSF 28.39 0.87 27.16 0.87 27.48 0.85 27.82 0.83 24.66 0.82 27.10 0.85
Noisy TransWeather
(AllWeather)
TransWeather
(SynthRSF)
TransWeather
(AllWeather+SynthRSF)
Figure 2: Qualitative results from denoising real world images: (a) Snow (Row 1), (b) Rain (Row 2), (c) Fog (Row 3).
with snow, fog/rain and raindrop degradations respec-
tively. In recent years AllWeather has become the go-
to dataset for unified models. As such, it was chosen
as the comparison dataset. For the evaluation pro-
cess three instances of TransWeather are utilised on
distinct datasets: (a) the original AllWeather dataset;
(b) the SynthRSF dataset; and, (c) the combination of
both datasets by using all images as input. Combin-
ing datasets often produces highly desirable results, as
the literature (Liu et al., 2019; Yao et al., 2023) sug-
gests. The three instances are evaluated on the combi-
nation of Snow-100KL (snow) and test1 (rain, fog), as
well as the test set of SynthRSF (snow, rain, fog). Im-
ages with raindrop noise were not used. For training,
SynthRSF images were downscaled from 1920x1080
to 720x405 pixels.
SynthRSF: A Novel Photorealistic Synthetic Dataset for Adverse Weather Condition Denoising
571

AllWeather Snow sample
AllWeather Rain-Fog sample
SynthRSF snow sample
SynthRSF rain sample
SynthRSF fog sample
Noisy Denoised
All-
Weather
Denoised
Synth-
RSF
Denoised
Both
Ground
truth
Figure 3: Denoising images from both datasets using
trained TransWeather models.
4.1.3 Training Parameters
While training, TransWeather the default settings
mentioned in (Valanarasu et al., 2022) are used with-
out alteration to any of the hyperparameters. All mod-
els are trained on a single NVIDIA RTX 3090 GPU
using the PyTorch framework (Paszke et al., 2019).
4.1.4 Quantitative Results
To evaluate performance we use the PSNR and SSIM
metrics. The results for Snow-100KL, test1 and
SynthRSF test set are summarized in Table 1. As
expected, the model instance trained on the combi-
nation of the datasets demonstrates the best overall
performance. Furthermore, using SynthRSF in com-
bination with AllWeather improves the performance
of TransWeather for Snow100KL while not hurting
the performance for test1. On the contrary, when
testing SynthRSF test set, AllWeather does not seem
to improve but rather diminishes the performance of
the model when used in combination with SynthRSF.
This demonstrates the efficacy of SynthRSF when
combined with existing datasets and as well as its
comprehensiveness and efficiency as a standalone so-
lution.
4.1.5 Qualitative Results
Synthetic Datasets. The predictions of the three
model instances for images of the three test sets are il-
lustrated in Figure 3. Similarly to quantitative results,
the usage of SynthRSF appears to improve model per-
formance, especially for the case of fog removal.
Real World Images. In this case (Figure 2), the ef-
fectiveness of SynthRSF is more apparent. All model
instances showcase good denoising results, but the
instances that used SynthRSF either by itself or in
combination with AllWeather outperform the one that
uses AllWeather only. Notably, the instance trained
solely on SynthRSF removes even the farther and
denser fog element, while the instance trained solely
on AllWeather struggles to remove fog even at close
distances.
4.2 Subjective Assessment Experiment
In order to evaluate training by SynthRSF in compar-
ison with previous datasets, tests are performed on 75
real-world images collected from the Internet. Al-
though a ground truth clear image for such cannot
exist, and hence numerical results are not applicable,
qualitative comparison can be performed on a subjec-
tive level.
Those images were fed to the three previously
trained TransWeather models, and the results were
evaluated by 70 survey participants. Participants, us-
ing their personal displays, with no time restrictions,
accessed an online form to compare each noisy image
with the three randomly ordered denoised versions,
selecting the one they found clearest.
Survey results in Table 2 show a strong preference
for SynthRSF-restored images, especially in images
of rain and fog. While preferences for ”snowy” im-
ages are less pronounced, SynthRSF still leads. De-
spite the model trained on AllWeather often removing
more individual snowflakes or rain streaks, the model
trained on SynthRSF, because of its fog data, tends
to clean up the distant parts of the image that are ob-
scured by the fog-induced light scattering.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
572
Table 2: Subjective assessment experiment - Summary of
data from 70 survey participants for the total votes per
model, and the number of times each model was chosen
as the preferred option across 75 noisy images.
Training set All-
Weather
Synth-
RSF
Both
Rain
Total votes 149/1167 610/1167 408/1167
Top voted image 1/21 12/21 8/21
Snow
Total votes 381/1773 795/1773 597/1773
Top voted image 3/30 15/30 12/30
Fog
Total votes 149/1567 911/1567 507/1567
Top voted image 1/24 18/24 5/24
4.3 Benchmarking an Object Detector
on Denoised Images
4.3.1 Benchmarking YoloV8 on Synthetic Noisy
Images
As a test case for SynthRSF-MM, it is used to bench-
mark the performance of YOLOv8 on images con-
taining adverse weather noise and their denoised
counterparts. As testing data, the COCO validation
dataset is used, with overlayed snow masks from
CSD (Chen et al., 2021) and SRRS (Chen et al.,
2020) datasets, as well as rain masks from RainTrainL
(Zhang and Patel, 2018) dataset. For fog, the COCO
dataset does not provide depth maps, so the RTTS
dataset is used (Li et al., 2018) providing noisy im-
ages and object annotations. Results are summarised
in Table 3.
4.3.2 Benchmarking YoloV8 on SynthRSF-MM
Demonstrating the utility of SynthRSF-MM’s annota-
tions, the denoising and object detection experiment
is performed on the SynthRSF-MM images. The re-
sults are summarised in table 4. The combined All-
Weather+SynthRSF dataset training produces better
results in snow and rain images, while SynthRSF-
only training was the most beneficial in fog images.
5 CONCLUSIONS
In this paper, we have presented and shared
SynthRSF, a novel synthetic dataset focused on ad-
verse conditions. Its utility has been validated in mul-
tiple experiments: a) by training the TransWeather
Table 3: YOLOV8 results on COCO/RTTS with syn-
thetic noise, denoised by TransWeather trained on different
datasets. Combined training is superior in snow and rain,
SynthRSF performs better alone in fog.
Training set mAP50 mAP50-95
Snow (COCO w/CSD/SRRS)
noisy 0.623 0.466
AllWeather 0.629 0.468
SynthRSF 0.605 0.447
AllWeather+SynthRSF 0.632 0.471
Rain (COCO w/RainTrainL)
noisy 0.626 0.466
AllWeather 0.615 0.455
SynthRSF 0.616 0.457
AllWeather+SynthRSF 0.628 0.466
Fog (RTTS)
noisy 0.656 0.416
AllWeather 0.644 0.409
SynthRSF 0.665 0.42
AllWeather+SynthRSF 0.658 0.417
Table 4: YOLOV8 results on SynthRSF-MM dataset de-
noised by TransWeather trained on different datasets.
Training set mAP50 mAP50-95
Rain
noisy 0.293 0.218
AllWeather 0.319 0.239
SynthRSF 0.327 0.25
AllWeather+SynthRSF 0.336 0.256
Snow
noisy 0.303 0.224
AllWeather 0.326 0.245
SynthRSF 0.314 0.238
AllWeather+SynthRSF 0.325 0.247
Fog
noisy 0.296 0.22
AllWeather 0.288 0.217
SynthRSF 0.307 0.227
AllWeather+SynthRSF 0.302 0.227
image denoising deep learning model in a series of
both objective and subjective experiments; and b) by
benchmarking a state-of-the-art object detection algo-
rithm in its performance in the absence or presence of
adverse weather conditions.
We have also presented SynthRSF-MM, a novel
multi-modal dataset, which includes depth maps for
all images, as well as pixel-level annotations for 39
object classes. Although its potential uses are many,
the experiments highlight its functionality as a test set
for measuring an object detector’s performance in var-
ious inputs.
SynthRSF: A Novel Photorealistic Synthetic Dataset for Adverse Weather Condition Denoising
573

ACKNOWLEDGEMENTS
This research has been supported by the Euro-
pean Commission funded program RESCUER, under
H2020 Grant Agreement 101021836.
REFERENCES
A Handa, V Patraucean, V. B. S. S. R. C. (2016). Under-
standing real world indoor scenes with synthetic data.
In CVPR 2016.
Ancuti, C., Ancuti, C. O., Timofte, R., and
De Vleeschouwer, C. (2018a). I-haze: a dehaz-
ing benchmark with real hazy and haze-free indoor
images. In ACIVS 2018, Proceedings 19. Springer.
Ancuti, C. O., Ancuti, C., Timofte, R., and
De Vleeschouwer, C. (2018b). O-haze: A de-
hazing benchmark with real hazy and haze-free
outdoor images. In CVPR 2018, NTIRE Workshop,
NTIRE CVPR’18, Salt Lake City, Utah, USA.
Ba, Y., Zhang, H., Yang, E., Suzuki, A., Pfahnl, A., Chan-
drappa, C. C., de Melo, C. M., You, S., Soatto, S.,
Wong, A., et al. (2022). Not just streaks: Towards
ground truth for single image deraining. In ECCV.
Butler, D. J., Wulff, J., Stanley, G. B., and Black, M. J.
(2012). A naturalistic open source movie for optical
flow evaluation. In ECCV Proceedings, Part VI 12.
Chen, W.-T., Fang, H.-Y., Ding, J.-J., Tsai, C.-C., and Kuo,
S.-Y. (2020). Jstasr: Joint size and transparency-
aware snow removal algorithm based on modified par-
tial convolution and veiling effect removal. In ECCV
2020 Proceedings, Part XXI 16. Springer.
Chen, W.-T., Fang, H.-Y., Hsieh, C.-L., Tsai, C.-C., Chen,
I., Ding, J.-J., Kuo, S.-Y., et al. (2021). All snow re-
moved: Single image desnowing algorithm using hier-
archical dual-tree complex wavelet representation and
contradict channel loss. In CVPR 2021.
Chen, W.-T., Huang, Z.-K., Tsai, C.-C., Yang, H.-H., Ding,
J.-J., and Kuo, S.-Y. (2022). Learning multiple ad-
verse weather removal via two-stage knowledge learn-
ing and multi-contrastive regularization: Toward a
unified model. In CVPR 2022.
Fu, X., Huang, J., Zeng, D., Huang, Y., Ding, X., and Pais-
ley, J. (2017). Removing rain from single images via
a deep detail network. In CVPR 2017.
Karavarsamis, S., Doumanoglou, A., Konstantoudakis, K.,
and Zarpalas, D. (2022a). Cross-stitched multi-task
dual recursive networks for unified single image de-
raining and desnowing. In WF-IoT 2022.
Karavarsamis, S., Gkika, I., Gkitsas, V., Konstantoudakis,
K., and Zarpalas, D. (2022b). A survey of deep
learning-based image restoration methods for enhanc-
ing situational awareness at disaster sites: the cases of
rain, snow and haze. Sensors, 22(13).
Li, B., Liu, X., Hu, P., Wu, Z., Lv, J., and Peng, X. (2022).
All-in-one image restoration for unknown corruption.
In CVPR 2022.
Li, B., Ren, W., Fu, D., Tao, D., Feng, D., Zeng, W., and
Wang, Z. (2018). Benchmarking single-image dehaz-
ing and beyond. IEEE Transactions on Image Pro-
cessing, 28(1).
Li, R., Cheong, L.-F., and Tan, R. T. (2019). Heavy rain
image restoration: Integrating physics model and con-
ditional adversarial learning. In CVPR 2019.
Li, R., Tan, R. T., and Cheong, L.-F. (2020). All in one bad
weather removal using architectural search. In CVPR.
Liu, P., Zhou, X., Yang, J., El Basha Mohammad, D., and
Fang, R. (2019). Image restoration using deep regu-
lated convolutional networks.
Liu, Y.-F., Jaw, D.-W., Huang, S.-C., and Hwang, J.-N.
(2018). Desnownet: Context-aware deep network for
snow removal. IEEE Trans. Image Processing, 27(6).
Mayer, N., Ilg, E., Hausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. (2016). A large dataset
to train convolutional networks for disparity, optical
flow, and scene flow estimation. In CVPR 2016.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
PyTorch: An Imperative Style, High-Performance
Deep Learning Library. In Advances in Neural Infor-
mation Processing Systems 32.
Qian, R., Tan, R. T., Yang, W., Su, J., and Liu, J. (2018).
Attentive generative adversarial network for raindrop
removal from a single image. In CVPR 2018.
Ren, Y., Li, S., Nie, M., and Chuankun, L. (2020). Single
image de-raining via improved generative adversarial
nets. Sensors, 20.
Richter, S. R., Vineet, V., Roth, S., and Koltun, V. (2016).
Playing for data: Ground truth from computer games.
In ECCV 2016 Proceedings, Part II 14. Springer.
Valanarasu, J. M. J., Yasarla, R., and Patel, V. M. (2022).
Transweather: Transformer-based restoration of im-
ages degraded by adverse weather conditions. In
CVPR 2022.
Wang, T., Zhang, K., Shao, Z., Luo, W., Stenger, B., Lu, T.,
Kim, T.-K., Liu, W., and Li, H. (2023). Gridformer:
Residual dense transformer with grid structure for im-
age restoration in adverse weather conditions. arXiv
preprint arXiv:2305.17863.
Yang, W., Tan, R. T., Wang, S., Fang, Y., and Liu, J. (2019).
Single image deraining: From model-based to data-
driven and beyond.
Yang, W., Tan, R. T., Wang, S., Fang, Y., and Liu, J. (2020).
Single image deraining: From model-based to data-
driven and beyond. PAMI 2020, 43(11).
Yao, M., Xu, R., Guan, Y., Huang, J., and Xiong, Z. (2023).
Neural degradation representation learning for all-in-
one image restoration.
Zhang, H. and Patel, V. M. (2018). Density-aware single
image de-raining using a multi-stream dense network.
In CVPR 2018.
¨
Ozdenizci, O. and Legenstein, R. (2022). Restoring vi-
sion in adverse weather conditions with patch-based
denoising diffusion models.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
574
