
Data-Driven Viscosity Solver for Fluid Simulation
Wonjung Park
a
, Hyunsoo Kim
b
and Jinah Park
c
Korea Advanced Institute of Science and Technology, Daejeon, Korea
Keywords:
Physical Simulation, Machine Learning, Viscous Fluid, Convolutional Neural Network.
Abstract:
We propose a data-driven viscosity solver based on U-shaped convolutional neural network to predict velocity
changes due to viscosity. Our solver takes velocity derivatives, fluid volume, and solid indicator quantities
as input. The traditional marker-and-cell (MAC) grid stores velocities at the edges of the grid, causing the
dimensions of the velocity field vary from axis to axis. In our work, we suggest a symmetric MAC grid
that maintains consistent dimensions across axes without interpolation or symmetry breaking. The proposed
grid effectively transfers spatial fluid quantities such as partial derivatives of velocity, enabling networks to
generate accurate predictions. Additionally, we introduce a physics-based loss inspired by the variational
formulation of viscosity to enhance the network’s generalization for a wide range of viscosity coefficients.
We demonstrate various fluid simulation results, including 2D and 3D fluid-rigid body scenes and a scene
exhibiting the buckling effect.
1 INTRODUCTION
Numerical methods for fluid simulation have been
widely used in various fields such as industrial design,
and computer graphics. These methods solve incom-
pressible Navier-Stokes (N-S) equations, the govern-
ing equation of fluid dynamics in the form of partial
differential equations (PDEs). The process of solving
N-S equations is well-known for being computation-
ally expensive and the cost is mostly from solving a
series of linear systems by iterative methods.
In recent years, various studies (Kim et al., 2019;
Richter-Powell et al., 2022; Tompson et al., 2017)
have adopted machine learning to accelerate the pro-
jection step of fluid simulation. By replacing iterative
methods with highly parallel GPU-optimized neural
networks, they were able to greatly accelerate the
overall fluid simulation. In addition to the parallelism,
these methods exploit the fact that pressure makes the
fluid incompressible. Unlike typical machine learning
regression, which solely relies on supervised learning
from the dataset, they are designed to enforce the in-
compressibility of the velocity field. Therefore, they
can be trained with a small dataset and generalize well
to scenes outside of the training data.
Although the data-driven projection solver accel-
a
https://orcid.org/0000-0003-1075-612X
b
https://orcid.org/0000-0002-0404-1892
c
https://orcid.org/0000-0003-4676-9862
erates the simulation of inviscid fluid to the real-time
level, we found that it is insignificant when used for
a viscous fluid. Traditional viscosity solvers have to
solve linear systems that are 4 times larger than the
projection stage in 2D (x8 for 3D), since it deals with
twice more fluid quantities per each dimension. How-
ever, studies on the data-driven viscosity solver have
not yet been conducted in depth, since generalization
of the viscosity solver is a challenging problem.
The challenge comes from two factors. First, it
is difficult for networks to generalize over viscosity
coefficients because it varies in a wide range from
zero (inviscid) to infinity (solid). Second, the pressure
is stored at the cell center whereas the fluid velocity
is stored at the cell boundary of the marker-and-cell
(MAC) grid for Eulerian simulation. This structure
yields an asymmetry of the velocity field; for exam-
ple, the velocity of the x-direction has the dimension
(n + 1,n) but the y-direction has (n,n +1) for the Eu-
lerian MAC grid n × n. Therefore, unlike general im-
age data for CNNs, fluid velocity requires special care
due to their distinct and asymmetric structure.
We design the viscosity solver architecture with
these problems in mind. To generalize the solver
for viscosity coefficients, we inherit the variational
interpretation of the viscosity from the conventional
solver (Batty and Bridson, 2008), using its minimiza-
tion problem as the training loss. In addition, we in-
troduce the symmetric MAC grid to enable the sym-
Park, W., Kim, H. and Park, J.
Data-Driven Viscosity Solver for Fluid Simulation.
DOI: 10.5220/0012397300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 269-276
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
269

metric representation of fluids regardless of the axis.
To our knowledge, this is the first data-driven vis-
cosity solver, so we focus on elaborating an archi-
tecture that generalizes to various scenarios. In this
paper, we validate our architecture through ablation
studies of neural network configurations. Finally, we
demonstrate the universality of our solver in various
scenarios, including unseen rigid-fluid scenes, mixed
dynamic viscosity scenes, and 3D scene which shows
buckling effect of viscous fluid.
2 RELATED WORK
The main subject of this study is to simulate viscous
fluids governed by the incompressible Navier-Stokes
(N-S) equations with our data-driven viscosity solver.
The Navier-Stokes (N-S) equations are:
Dv
Dt
= −
1
ρ
∇p +
µ
ρ
∇
2
v + g, (1)
∇ · v = 0. (2)
There are three approaches to numerically simulate
the N-S equations: grid-based (Eulerian), particle-
based (Lagrangian), and Lagrangian/Eulerian hybrid
appraoches. Hybrid simulation uses particles to trans-
port fluid and grids to update velocity by external
forces, pressure, and viscosity. For spatial discretiza-
tion of fluid quantities, marker-and-cell method (Har-
low and Welch, 1965), which stores velocities on
edges of cells, is often used in grid-based simulation.
The projection term in the N-S equations (the
first term in the RHS of Equ. 1) enforces the incom-
pressibility as formulated in Equ. 2. Combining the
two equations gives Poisson’s equation (∇
2
p = f ),
whose discrete form can be solved using linear sys-
tem solvers.
The viscosity term in the N-S equations (second
term in RHS of Equ. 1) gives the viscous behavior,
accounting for internal friction. With explicit solvers,
this term can become numerically unstable especially
for high dynamic viscosity µ. Thus, a more stable
implicit formulation of the viscosity fluid for hybrid
methods is proposed in (Batty and Bridson, 2008).
They interpreted the viscosity term as a minimization
problem that seeks to minimize the rate of viscous dis-
sipation with the smallest velocity change possible. In
2D, the minimization problem is defined as:
min
−→
u
¨
ρ
−→
u −
−→
u
old
2
+2∆t
¨
µ
∇
−→
u + (∇
−→
u )
T
)
2
2
F
(3)
To reduce the computational cost of fluid simula-
tions, various dimensionality reduction methods have
been proposed. Model reduction for fluid-rigid sim-
ulation is discussed in (Treuille et al., 2006). In ad-
dition, multi-resolution Eulerian grids are introduced
for efficient Poisson equation solving in both invis-
cid (Chentanez and M
¨
uller, 2011; McAdams et al.,
2010) and viscous fluids (Aanjaneya et al., 2019;
Shao et al., 2022). Furthermore, recent studies ap-
plied machine learning techniques including princi-
pal component analysis (Xiao et al., 2018b), regres-
sion forests (Ladick
`
y et al., 2015), Long Short-Term
Memory (Wiewel et al., 2020), generative adversar-
ial networks (Cheng et al., 2020), and graph net-
works (Sanchez-Gonzalez et al., 2020; Li and Fari-
mani, 2022).
Among these machine learning techniques, con-
volutional neural networks (CNNs) have shown their
effectiveness in Eulerian and hybrid fluid simulation.
Since the Eulerian grid has a similar structure to the
image, many studies applied CNN to fluid simulation
(Guo et al., 2016; Obiols-Sales et al., 2020; Thuerey
et al., 2020; Xiao et al., 2019). Some studies (Kim
et al., 2019) proposed generative networks that out-
put the next velocity fields based on reduced param-
eters. Alternatively, other studies (Tompson et al.,
2017; Xiao et al., 2018b; Xiao et al., 2018a; Yang
et al., 2016; Gao et al., 2020) maintain the traditional
fluid simulation process but replace the most time-
consuming projection step with a data-driven solver.
The traditional projection step with discretized PDE is
computationally expensive and data dependent, since
it is solved by iterative methods until it meets the con-
ditions. Thus, the replacement of Poisson’s equation
with deep learning techniques (Richter-Powell et al.,
2022; Tang et al., 2017) have been actively researched
to efficiently derive the solution. Despite the effi-
ciency and generalization of these data-driven projec-
tion solvers, their impact on viscous fluids is limited
as the viscosity step remains a significant bottleneck.
In this study, we propose a CNN-based viscos-
ity solver that replaces the PDE-based solver (Batty
and Bridson, 2008) to effectively reduce the compu-
tational costs of the viscous fluid.
3 METHOD
3.1 Data-Driven Viscosity Solver
We suggest a data-driven viscosity solver that predicts
velocity change by viscosity. As Fig. 1 shows, the
overall process is based on the affine particle-in-cell
(APIC) (Jiang et al., 2015) simulator, which trans-
ports fluid with particles and updates the velocity by
external force, viscosity, and pressure on the grid. The
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
270

Figure 1: Fluid simulation with data-driven viscosity
solver. Using the traditional affine particle-in-cell (Jiang
et al., 2015) simulator as a baseline, our data-driven solver
replaces the viscosity solver to output velocity changes due
to viscosity. Training ground truth is generated with the tra-
ditional viscosity solver (Batty and Bridson, 2008).
viscosity solver updates the velocity u
old
t
from the ex-
ternal force step (gravity) to the velocity u
t
. We use
the velocity difference △u
t
= u
t
− u
old
t
solved by the
traditional solver (Batty and Bridson, 2008) as the
ground truth for training.
3.1.1 Loss Function
We train our model by supervised learning with L2
loss which is the mean squared error between ground
truth and model output. In addition, we suggest the
variational loss L
v
which is the variational formula-
tion of the conventional viscosity solver. When train-
ing the model only for fixed dynamic viscosity, L2
loss is sufficient to converge the model. However, for
a dataset that contains various dynamic viscosity at
the same time, we use both losses together to regu-
larize the network for dynamic viscosity µ. Our loss
function is composed of the sum of L2 loss and varia-
tional loss L
v
with equal weights. We trained the net-
work with Adam optimizer(Kingma and Ba, 2014).
The variational loss L
v
on the 2D Eulerian grid is de-
rived as follows, where velocity u = (u,v):
L
v
(u,△t,ρ,µ)
=
1
n(n + 1)
n+1
∑
i=1
n
∑
j=1
ρ
u
i−
1
2
, j
−u
old
i−
1
2
, j
2
+
1
n(n + 1)
n
∑
i=1
n+1
∑
j=1
ρ
v
i, j−
1
2
−v
old
i, j−
1
2
2
+
1
n
2
2△t
n
∑
i=1
n
∑
j=1
µ
(▽u
i, j
+ ▽u
T
i, j
)
2
2
F
where ▽u
i, j
=
"
1
△x
(u
i+
1
2
, j
−u
i−
1
2
, j
)
1
△y
(u
i, j+
1
2
−u
i, j−
1
2
)
1
△x
(v
i+
1
2
, j
−v
i−
1
2
, j
)
1
△y
(v
i, j+
1
2
−v
i, j−
1
2
)
#
(4)
The sum of the first and second term of L
v
can be
derived by the average of the element-wise squared
output because the output is velocity change due to
viscosity. The third term denotes the fluid dissipa-
tion over the timestep. Through this term, L
v
im-
poses a greater loss for higher viscosity, helping the
Figure 2: U-Shaped convolutional neural network for our
data-driven viscosity solver.
network to create less velocity difference between ad-
jacent fluid elements.
3.2 Architecture
3.2.1 u-Shaped CNN Model
We design the neural network architecture with the
following two conditions in mind. First, the network
allows input and output to have the same dimensions
in width and height since they are defined on the same
Eulerian grid. Second, the architecture should grasp
important features of viscosity.
Viscosity is the resistance force of a fluid that re-
duces the velocity difference with neighboring fluids.
In addition, fluids in the boundary layer, which is a
thin layer near the boundary between the fluid and the
solid, are more affected by viscosity. In other words,
both the local feature representing adjacent fluid ele-
ments and the global feature revealing the location of
the fluid element with respect to the fluid-rigid body
scene are important for predicting the velocity. There-
fore, we set the U-Net (Ronneberger et al., 2015) as
a backbone because its multi-resolution feature maps
help the network learn both local and global features
of fluid-rigid body scene, and generate output of the
same size as the input.
Unlike the image segmentation task of the orig-
inal U-Net, our viscosity solver aims to output the
velocity change for each dimension. The velocity
change has the distinct property that it has the range
(−∞,∞). Constructing a network that produces exact
velocity changes that could be positive or negative is
a challenging task. To find the best architecture, we
have experimented with various conditions to explore
which model predicts accurate and unbiased output.
As a result, our network consists of tangent hyper-
bolic activation function and average pooling layers
as depicted in Fig. 2. We will elaborate the compari-
son of network configuration in section 4.
Data-Driven Viscosity Solver for Fluid Simulation
271
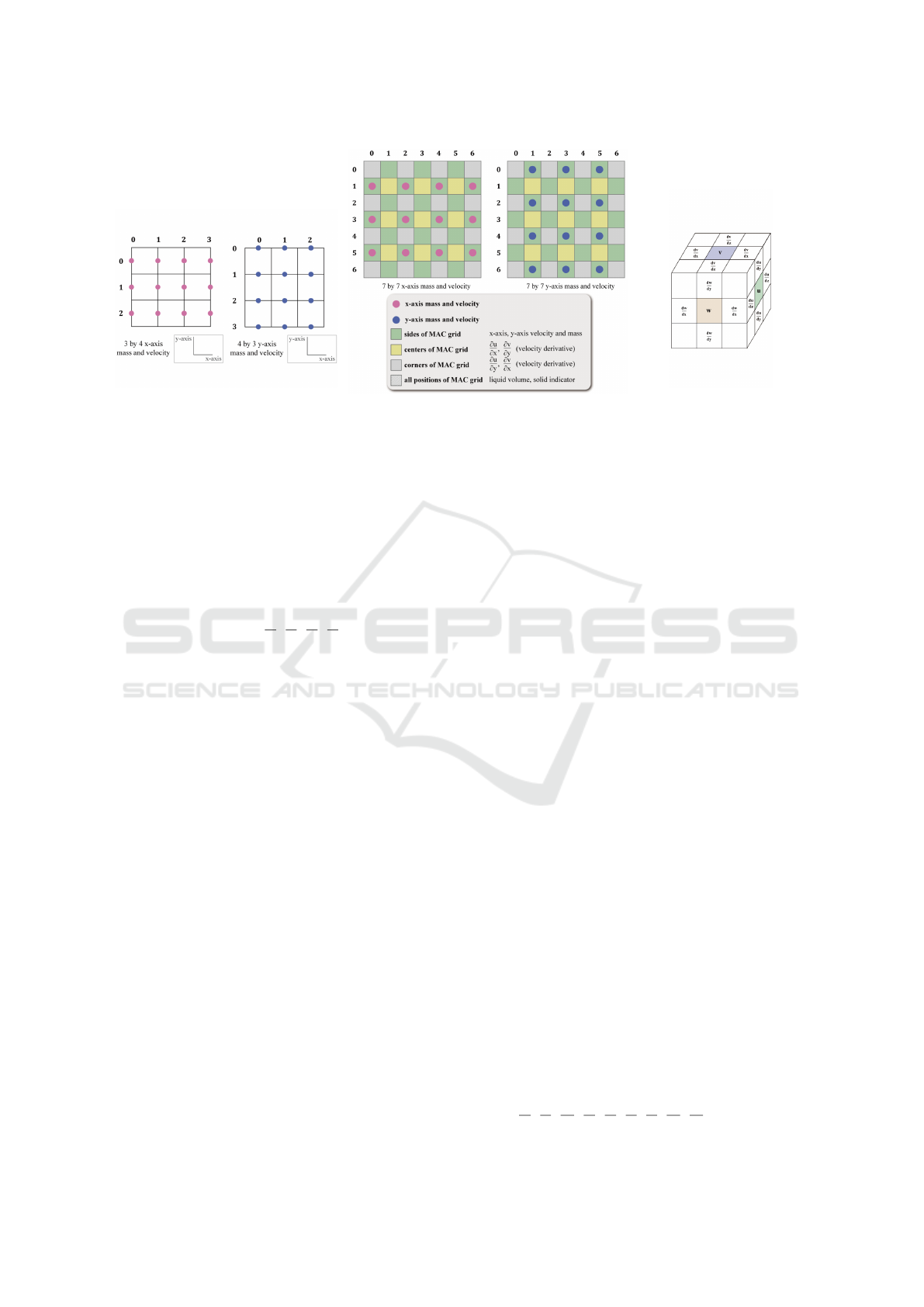
(a) Marker-and-cell (MAC) grid. (b) Symmetric MAC grid for 2D CNN. (c) Symmetric MAC grid for 3D CNN.
Figure 3: Extension of the MAC grid for CNN-based viscosity solver To adjust input channel dimensions without losing
information or breaking symmetry, we propose the symmetric MAC grid. This grid ensures symmetry in all input channels.
3.2.2 Configuration of Input Channels
Our data-driven solver takes all necessary fluid quan-
tities as input. This includes velocity derivatives to
capture velocity differences with neighboring grid po-
sitions. In addition, the conventional solver requires
fluid volume for each cell and a phase indicator (solid
or not) on the grid positions. In summary, for the
2D grid, the input channels consist of four veloc-
ity derivative channels
∂u
∂x
,
∂v
∂y
,
∂u
∂y
,
∂v
∂x
for the velocity
field u = (u,v), one channel for fluid volume, and one
channel for the solid indicator.
Velocity Derivative Channels. We use velocity
derivatives instead of velocity itself in the construc-
tion of input channels because viscosity acts to re-
duce the velocity derivatives of the neighboring fluid.
Moreover, using the velocity itself as input, the output
would be varied by the velocity scale. For example,
during free fall, there should be no velocity change
caused by viscosity, but the network prones to output
varying values due to the accelerated velocity. Hence,
velocity derivative channels are employed for gener-
alization across different velocity scales.
Fluid Volume Channel. To convey the volume quan-
tity to the CNN, we suggest using a fluid volume
channel. First, the signed distance from the fluid sur-
face, constructed from a spherical surface of each par-
ticle, is computed for each corner (4 corners for 2D
cell, and 8 for 3D cell) of the cell. From signed dis-
tances of two adjacent corner d
+
and d
−
, edge occu-
pancy of fluid is derived as V
e
= −(d
−
/(d
+
− d
−
)).
Then, the face (or volume) occupancy is approxi-
mated as the average of the occupancy of its 4 edges
(or 6 faces in 3D). For the generalization of the fluid
volume, we normalized the volume by the factor of
maximum volume of one grid cell, so that the fluid
volume is in [0, 1].
Solid Indicator Channel. In addition, to deliver the
status of the grid position, we suggest solid indicator
channel, constructed by the signed distance D
i, j
from
solid on the position x = (i, j). We set the solid indi-
cator channel as follows:
solid indicator
i, j
=
0 if D
i, j
> 0
1 if D
i, j
≤ 0
(5)
Viscosity Coefficient Channel. Finally, we suggest
an optional viscosity coefficient channel. While the
network converges well without this channel when
trained for a fixed viscosity coefficient, it becomes es-
sential for generalization across a wide range of vis-
cosity coefficients. The viscosity coefficient channel,
denoted by coeff
i, j
, is assigned the dynamic viscosity
µ in Pa·s. When implementing the channel, only cells
with positive fluid volume are set as µ. The viscosity
coefficient channel is set as follows:
coeff
i, j
=
0 if cell
i, j
is air or solid
µ if cell
i, j
is liquid
(6)
The U-shaped architecture requires pooling, thus
we expand the dimension by padding to be divisible
by 2
n
where n is the number of pooling layers. Zero
padding is applied for velocity derivative, fluid vol-
ume, and viscosity coefficient channels, while one is
used for a solid indicator channel. Random padding
is applied to both the height and width dimensions to
accommodate the various positions of the rigid body.
Our architecture readily extends to 3D fluid
simulation using the symmetric MAC grid for 3D
fluid quantities as shown in Fig. 3c. All layers
of U-shaped architecture should be replaced into
3D layers, for example, 3D convolution, 3D av-
erage pooling, and 3D transposed convolution lay-
ers for upsampling. The input channels are given
with
∂u
∂x
,
∂v
∂y
,
∂w
∂z
,
∂u
∂y
,
∂u
∂z
,
∂v
∂x
,
∂v
∂z
,
∂w
∂x
,
∂w
∂y
, fluid volume,
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
272

and solid indicator on symmetric MAC grid for fluid
velocity u = (u,v,w).
3.3 Symmetric MAC Grid for CNN
Marker-and-cell (MAC) grid (Harlow and Welch,
1965) stores fluid velocity and mass quantities at the
edge of the grid as illustrated in Fig. 3(a) so that the
dimensions of the quantities vary from axis to axis.
For example, for the grid size (n,n), the velocity di-
mension of the x-direction is (n + 1, n) and the y-
direction is (n,n +1). Therefore, to input information
from the x and y-direction together, modifying the di-
mensions is required.
Figure 4: Comparison of input architecture. (Left)
Ground truth, (Middle) Result from the input with simple
padding, and (Right) input with our symmetric MAC grid.
For fluid simulation, fluid quantities must be han-
dled with care since tiny biases accumulate errors
over successive frames. For the case of CNN for im-
ages, interpolation or padding could be a simple so-
lution that rectifies the dimension. However, interpo-
lation yields a loss of fluid information. Furthermore,
simple padding causes an asymmetry between input
channels that results in a tilted simulation, as Fig. 4
illustrates.
To address this problem we suggest a symmet-
ric MAC grid for CNN that preserves all information
without loss and generates symmetric input channels,
regardless of the axis. Our symmetric MAC grid ex-
tends the original MAC grid including not only the
centers but also the corners and edges of the cells.
Therefore, the dimension of the symmetric MAC grid
becomes (2n + 1, 2n + 1) for the (n,n) grid. The
quantities of mass and velocity of the x-direction are
defined in pink circles, and the y-direction in blue cir-
cles as shown in Fig. 3(b). The network output chan-
nels, which are the x-direction and the y-direction ve-
locity change, are also placed in the same position.
The other cells without value are filled with zero not
to influence the neural network.
In addition, this architecture facilitates the genera-
tion of derivative channels. To be more specific,
∂u
∂x
,
∂v
∂y
are placed in the yellow cell and
∂u
∂y
,
∂v
∂x
are in the gray
cell. Liquid volume and solid indicator channels are
calculated for all cells. Therefore, our input architec-
ture guarantees that all input channels are symmetric
and yields symmetric simulation results as shown in
Fig. 4.
4 EXPERIMENTS ON U-SHAPED
CNN ARCHITECTURE
Figure 5: (a) From the initial resting state, the frame with
(b) average pooling and ReLU (c) max pooling and tangent
hyperbolic (Tanh) (d) average pooling and Tanh (ours).
Figure 6: Top row: velocity derivative input and Bottom
row: velocity input for (a) fluid drop and (b) colliding fluids
scenes. The scenes are in a training dataset.
Ablation studies on network architecture are demon-
strated in this section. We verify our network for vari-
ous conditions including activation functions, pooling
methods, and input channels.
Activation Function and Pooling Layers. The most
important factor in network configuration is unbiased
learning because bias results in tilted simulation. To
explore the best CNN layers, we conducted abla-
tion studies for the activation function between ReLU
and tangent hyperbolic, and the pooling method be-
tween the max and average pooling. As shown in
Fig. 5, ReLU which removes negative features, and
max pooling layer which ignores small features pro-
duce a distorted result for fluid drop scene. Therefore,
we design our network with a tangent hyperbolic ac-
tivation function and average pooling layers.
Velocity Channel vs. Velocity Derivative Channel.
As mentioned in subsubsection 3.2.2, the network re-
ceives velocity derivatives instead of raw velocity in-
puts. As shown in Fig. 6(a), the velocity derivative
maintains the shape of the sphere during free fall,
whereas the velocity channel distorts the sphere. This
is because the velocity is accelerated, so the CNN
solver prones to produce different outputs across the
time steps. On the other hand, since the velocity
derivative has a constant value of zero during free fall,
the consistent output is generated. For the same rea-
son, the velocity channel also produces a strange be-
havior for a more dynamic scene such as Fig. 6(b).
Data-Driven Viscosity Solver for Fluid Simulation
273
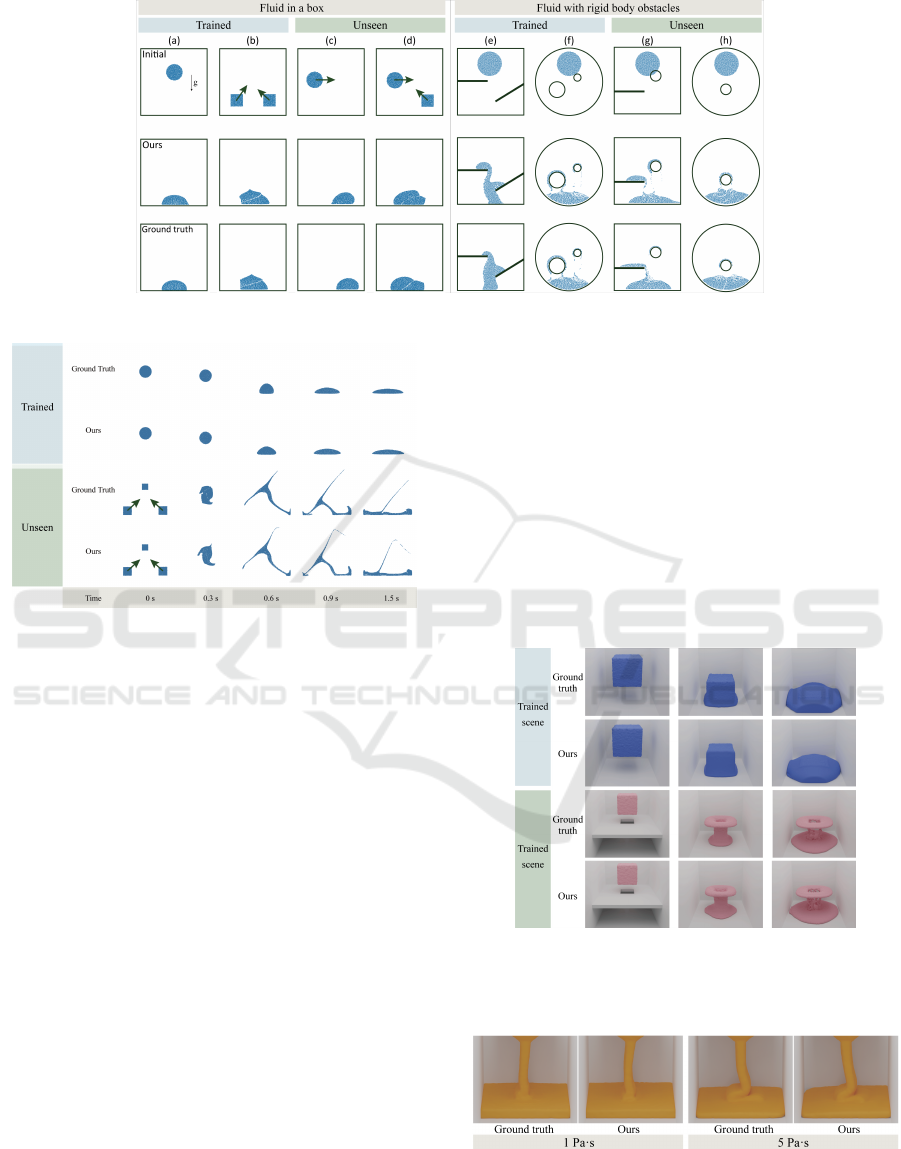
Figure 7: Simulation result comparison between our data-driven solver and ground truth for various scenarios.
Figure 8: Simulation result comparison with timestamps for
both trained and unseen scenes.
5 RESULTS
5.1 Universality of Data-Driven
Viscosity Solver
In order to verify the universality of the proposed ar-
chitecture, we demonstrate fluid simulation with var-
ious scenarios: fluids in a box, fluids with rigid body
obstacles, and 3D scenes exhibiting buckling effect.
5.1.1 Viscous Fluid with Rigid Bodies
We demonstrate our solver with two scenarios: fluid
in a box and fluid with rigid body obstacles in Fig. 7.
Both scenes are constructed with 1 Pa·s dynamic
viscosity, 300 Hz framerate, 2m × 2m space, and
100 × 100 Eulerian grid dimension. The training
epoch is 2000 and the learning rate is 5 × 10
−4
. Our
data-driven viscosity solver (with four pooling layers)
takes approximately 0.007 seconds per frame.
For the fluid in a box scenario, the neural net-
work is trained using 5-second fluid simulations of
Fig. 7(a,b), resulting in a dataset consisting of 1500
frames for each scene. Our solver outputs acceptable
visual fidelity for both trained and unseen(Fig. 7(c,d))
scenarios.
We tested our method in more complex scenes
with rigid body obstacles. The network is trained with
10-seconds fluid simulations of Fig. 7(e,f). Our solver
also shows similar results to ground truth for unseen
scenes of Fig. 7(g,h).
For further validation of our data-driven simula-
tion, we performed a timestamp-based comparison
between ours and the ground truth. For both trained
and unseen scenarios, our data-driven solver con-
sistently predicts similar velocity changes for every
timestamp as visualized in Fig. 8.
Figure 9: 3D fluid-rigid simulation Trained solely on the
fluid drop scene, our solver similarly simulates the unseen
scene with the ground truth. The space is 2m × 2m × 2m
with 80 × 80 × 80 Eulerian grid dimension.
Figure 10: Buckling effect of viscous fluid with 1 and 5
Pa·s dynamic viscosities. The simulated space is 0.6m ×
1m × 0.6m with Eulerian grid dimension 48 × 80 × 48.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
274

5.1.2 Extension to 3D Fluid Simulation
As depicted in Fig. 9, our solver trained on a fluid
drop scene successfully performs 3D fluid simula-
tions for both trained and unseen scenes. The net-
work effectively learns viscosity characteristics using
data from a simple scene and extends its capability in
more complex scenes with rigid bodies.
Our viscosity solver (with two pooling layers)
takes approximately 0.39 seconds per frame with an
80 × 80 × 80 Eulerian grid for scenes in Fig. 9.
Moreover, our solver simulates the buckling effect
of viscous fluid, demonstrated in Fig. 10. Similar to
the ground truth, the fluid with a lower viscosity co-
efficient (1 Pa·s) exhibits reduced buckling compared
to the 5 Pa·s case.
5.2 Generalization of Dynamic Viscosity
Figure 11: (a) Fluid drop scenes with one neural network
model for various viscosity coefficients.(b) Simulation re-
sult with viscosity coefficient channel set by left side as
1000 and right side as 1 mPa·s.
Our network can be generalized to various dynamic
viscosities µ. To provide dynamic viscosity informa-
tion, the viscosity coefficient input channel is option-
ally given to the network as mentioned in subsubsec-
tion 3.2.2. U-shaped viscosity solver with four pool-
ing layers is trained by 12000 frames consisting of
dynamic viscosity 1, 100, 500, 1000, 2000, and 3000
mPa·s equally. The trained model is well generalized
for unseen coefficients as shown in Fig. 11(a). For ex-
ample, although 700 mPa·s is not learned, it is spread
narrower than 100 and wider than 3000.
However, as shown in Fig. 11, our data-driven
solver cannot extrapolate the viscosity simulations
outside the trained dynamic viscosity range. The sim-
ulation is tilted to the right and upside because a large
dynamic viscosity affects the network to output large
x-direction (right) and y-direction (upward) velocity
changes. Therefore, a corresponding dataset is re-
quired to generate the model for a wide range of dy-
namic viscosity.
Moreover, mixed dynamic viscosity can be simu-
lated without additional training. For example, we as-
signed dynamic viscosity 1000 to the left and 1 mPa·s
to the right side in Fig. 11(b). The left side is less
spread out due to the large viscosity, whereas the right
side fluid spreads like water. We anticipate that our
model can be applied to complex scenes with multiple
viscosity coefficients. In-depth exploration of multi-
ple viscosity coefficients remains a future work.
5.3 Real-Time Application of
Rigid-Fluid Interaction
Figure 12: Progression of real-time 2D rigid-fluid interac-
tive application. Top row: Iterative viscosity solver (Batty
and Bridson, 2008). Bottom row: Our U-shaped CNN vis-
cosity solver which is nearly twice faster.
To demonstrate the efficiency of our solver, we ap-
plied our solver to a real-time interactive application
of paint mixing Fig. 12 where a rigid pointer (red cir-
cle) perturbs fluid of two different colors. The scene
consists of (25, 25) grid dimension and 848 particles.
On average, the baseline (Batty and Bridson, 2008)
runs at 14 Hz (71 ms) with 32ms iterative viscosity
solver, and ours takes 23Hz (42 ms) with 4ms data-
driven viscosity solver.
6 CONCLUSION
In this paper, we propose a data-driven viscosity
solver for a hybrid Lagrangian/Eulerian fluid simu-
lator, utilizing a symmetric MAC grid to represent
fluid quantities without symmetry breaking or inter-
polation. Our U-shaped CNN, with input channels of
velocity derivatives, fluid volume, and solid indica-
tors, predicts velocity changes with reasonable error
in both trained and unseen scenes. To show the effec-
tiveness of our architecture, we demonstrate various
scenes, including fluid with rigid bodies, mixed dy-
namic viscosity, and 3D fluid with a buckling effect.
We believe that the proposed data-driven viscos-
ity solver can be utilized for diverse fluid simulation,
as demonstrated in a real-time interactive application.
Our solver’s generalizability across a wide viscosity
range is achieved through a viscosity coefficient chan-
nel and a physics-based variational loss. While we
primarily analyze our network in 2D space, we plan
to further explore and optimize our method for 3D
viscous fluid simulation.
Data-Driven Viscosity Solver for Fluid Simulation
275

ACKNOWLEDGEMENTS
This work was supported by Institute for Informa-
tion & communications Technology Promotion(IITP)
grant funded by the Korea government(MSIT)
(No.00223446, Development of object-oriented syn-
thetic data generation and evaluation methods).
REFERENCES
Aanjaneya, M., Han, C., Goldade, R., and Batty, C. (2019).
An efficient geometric multigrid solver for viscous
liquids. Proceedings of the ACM on Computer Graph-
ics and Interactive Techniques, 2(2):1–21.
Batty, C. and Bridson, R. (2008). Accurate viscous
free surfaces for buckling, coiling, and rotating liq-
uids. In In Proc. Symposium on Computer Anima-
tion.ACM/Eurographics, page 219–228.
Cheng, M., Fang, F., Pain, C. C., and Navon, I. (2020).
Data-driven modelling of nonlinear spatio-temporal
fluid flows using a deep convolutional generative ad-
versarial network. Computer Methods in Applied Me-
chanics and Engineering, 365:113000.
Chentanez, N. and M
¨
uller, M. (2011). Real-time eulerian
water simulation using a restricted tall cell grid. In
ACM Siggraph 2011 Papers, pages 1–10.
Gao, Y., Zhang, Q., Li, S., Hao, A., and Qin, H. (2020).
Accelerating liquid simulation with an improved data-
driven method. In Computer Graphics Forum, vol-
ume 39, pages 180–191. Wiley Online Library.
Guo, X., Li, W., and Iorio, F. (2016). Convolutional neural
networks for steady flow approximation. In Proceed-
ings of the 22nd ACM SIGKDD international confer-
ence on knowledge discovery and data mining, pages
481–490.
Harlow, F. H. and Welch, J. E. (1965). Numerical calcu-
lation of time-dependent viscous incompressible flow
of fluid with free surface. The physics of fluids,
8(12):2182–2189.
Jiang, C., Schroeder, C., Selle, A., Teran, J., and Stomakhin,
A. (2015). The affine particle-in-cell method. ACM
Transactions on Graphics (TOG), 34(4):1–10.
Kim, B., Azevedo, V. C., Thuerey, N., Kim, T., Gross, M.,
and Solenthaler, B. (2019). Deep fluids: A generative
network for parameterized fluid simulations. In Com-
puter graphics forum, volume 38, pages 59–70. Wiley
Online Library.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Ladick
`
y, L., Jeong, S., Solenthaler, B., Pollefeys, M., and
Gross, M. (2015). Data-driven fluid simulations us-
ing regression forests. ACM Transactions on Graphics
(TOG), 34(6):1–9.
Li, Z. and Farimani, A. B. (2022). Graph neural network-
accelerated lagrangian fluid simulation. Computers &
Graphics, 103:201–211.
McAdams, A., Sifakis, E., and Teran, J. (2010). A parallel
multigrid poisson solver for fluids simulation on large
grids. In Symposium on Computer Animation, pages
65–73.
Obiols-Sales, O., Vishnu, A., Malaya, N., and Chan-
dramowliswharan, A. (2020). Cfdnet: A deep
learning-based accelerator for fluid simulations. In
Proceedings of the 34th ACM international confer-
ence on supercomputing, pages 1–12.
Richter-Powell, J., Lipman, Y., and Chen, R. T. (2022).
Neural conservation laws: A divergence-free perspec-
tive. arXiv preprint arXiv:2210.01741 (2022).
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Sanchez-Gonzalez, A., Godwin, J., Pfaff, T., Ying, R.,
Leskovec, J., and Battaglia, P. (2020). Learning to
simulate complex physics with graph networks. In
International conference on machine learning, pages
8459–8468. PMLR.
Shao, H., Huang, L., and Michels, D. L. (2022). A fast un-
smoothed aggregation algebraic multigrid framework
for the large-scale simulation of incompressible flow.
ACM Transactions on Graphics (TOG), 41(4):1–18.
Tang, W., Shan, T., Dang, X., Li, M., Yang, F., Xu, S.,
and Wu, J. (2017). Study on a poisson’s equation
solver based on deep learning technique. In 2017
IEEE Electrical Design of Advanced Packaging and
Systems Symposium (EDAPS), pages 1–3.
Thuerey, N., Weißenow, K., Prantl, L., and Hu, X. (2020).
Deep learning methods for reynolds-averaged navier–
stokes simulations of airfoil flows. AIAA Journal,
58(1):25–36.
Tompson, J., Schlachter, K., Sprechmann, P., and Perlin,
K. (2017). Accelerating eulerian fluid simulation with
convolutional networks. In International Conference
on Machine Learning, pages 3424–3433. PMLR.
Treuille, A., Lewis, A., and Popovi
´
c, Z. (2006). Model
reduction for real-time fluids. ACM Transactions on
Graphics (TOG), 25(3):826–834.
Wiewel, S., Kim, B., Azevedo, V. C., Solenthaler, B., and
Thuerey, N. (2020). Latent space subdivision: sta-
ble and controllable time predictions for fluid flow. In
Computer Graphics Forum, volume 39, pages 15–25.
Wiley Online Library.
Xiao, X., Wang, H., and Yang, X. (2019). A cnn-based
flow correction method for fast preview. In Computer
Graphics Forum, volume 38, pages 431–440. Wiley
Online Library.
Xiao, X., Yang, C., and Yang, X. (2018a). Adaptive
learning-based projection method for smoke simula-
tion. Computer Animation and Virtual Worlds, 29(3-
4):e1837.
Xiao, X., Zhou, Y., Wang, H., and Yang, X. (2018b).
A novel cnn-based poisson solver for fluid simula-
tion. IEEE transactions on visualization and computer
graphics, 26(3):1454–1465.
Yang, C., Yang, X., and Xiao, X. (2016). Data-driven pro-
jection method in fluid simulation. Computer Anima-
tion and Virtual Worlds, 27(3-4):415–424.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
276
