
An Optimised Ensemble Approach for Multivariate Multi-Step Forecasts
Using the Example of Flood Levels
Michel Spils
a
and Sven Tomforde
b
Department of Computer Science, University of Kiel, Kiel, Germany
Keywords:
Machine Learning, Time-Series Forecasting, Ensemble Deep Learning, Flood Forecasting.
Abstract:
Deep Learning methods have become increasingly popular for time-series forecasting in recent years. One
common way of improving time-series forecasts is to use ensembles. By combining forecasts of different
models, for example calculating the mean forecast, it is possible to get an ensemble that performs better than
each single member. This paper suggests a method of aggregating ensemble forecasts using another neural
network.The focus is on multivariate multi-step ahead forecasting. Experiments are done on 5 water levels at
small to medium-sized rivers and show improvements on naive ensembles and single neural networks.
1 INTRODUCTION
Flood and disaster protection are typically sovereign
tasks of local authorities and include not only coastal
regions but also areas of influence of flowing wa-
ters of different sizes. For example, the State Of-
fice for the Environment in Schleswig-Holstein, Ger-
many’s northernmost federal state, operates 182 gaug-
ing stations close to in-land rivers where water levels
and flow behaviour are determined and forecasts are
made. On the basis of these forecasts, disaster control
measures are taken if necessary. One challenging as-
pect of forecasting water levels is the lack of training
data. It is not possible to simply simulate the environ-
ment, the only way to gather more data for a gauging
station is to wait.
The application scenario requires very reliable
forecasts of water levels, as protective measures are
taken on this basis. At the same time, this places
special demands on forecasting methods because, on
the one hand, conditions are not static due to climate
change and changes in topology and, on the other
hand, the focus is on extreme events. Thus, a devi-
ation of a few percent in normal behaviour is abso-
lutely uncritical, whereas this is essential in the case
of floods. Hence, the overall goal is to investigate a
self-adaptive and self-learning forecast system with a
continuous assessment of uncertainty, reliability and
impact of the determined forecasts.
a
https://orcid.org/0000-0002-6431-6085
b
https://orcid.org/0000-0002-5825-8915
In this paper, we present a novel approach to gen-
erate and use ensembles for water level prediction.
Based on previous work on the forecast quality of
single predictors, we investigate to what extent an
ensemble of optimised models improves the forecast
quality. This is combined with an approach to op-
timise the weighting within the ensemble in order to
achieve a further gain in prediction quality and robust-
ness. We analyse the impact influence factors of the
observed behaviour and provide the considered data
of the experiments.
The remainder of this paper is organised as fol-
lows: Section 2 describes the current state-of-the-art
from a technical and an application point of view.
Section 3 introduces our approach for an ensemble-
based forecasting of flood levels. Afterwards, Sec-
tion 4 introduces the underlying data and metrics, fol-
lowed by a description of base models and execution
time. The analysis of the experimental results as well
as the insights and findings are discussed in Section 5.
Finally, Section 6 summarises the paper and describes
future work.
2 RELATED WORK
In the first subsection 2.1 we give a short overview of
flood forecasting using Machine learning in general,
in subsection 2.2 we focus on different ways of using
ensembles for forecasting.
388
Spils, M. and Tomforde, S.
An Optimised Ensemble Approach for Multivariate Multi-Step Forecasts Using the Example of Flood Levels.
DOI: 10.5220/0012396000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 388-396
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2.1 Flood Forecasting
In (Kratzert et al., 2021) Long Short-Term Memory
networks (LSTMs) are used to simulate flow rates
based on meteorological observations. They find that
it is possible to (pre-)train a single model to predict
flow rates at multiple basins. The authors of (Hu
et al., 2018) study the performance of LSTMs com-
pared to standard neural networks for flood forecast-
ing and find that they perform significantly better. In
(Kao et al., 2020) the authors explore LSTM based
Encoder-Decoder architectures for multi-step-ahead
flood forecasting.
In (Grundmann et al., 2020) the use of precipi-
tation forecast ensembles for flood forecasting is in-
vestigated. The German Weather Service provides an
ensemble with 20 members of high-resolution pre-
cipitation forecasts, which is useful for rare events
with strong rainfall that are not represented in the
main forecast. (Morgenstern et al., 2022) enrich their
LSTM input with statistical information such as area
maximum, minimum and standard deviation of pre-
cipitation intensity. (Wee et al., 2021) and (Mosavi
et al., 2018) give a general overview of water level and
flood forecasting using machine learning. Most re-
search on flood forecasting focuses on large rivers and
on either very short forecast horizon, up to six hours
ahead or on daily forecast. We attempt to forecast
water levels with a forecast horizon up to 48 hours at
small to medium sized rivers with a catchment area of
up to 600km
2
.
2.2 Ensemble-Based Forecasting
In (Sommer et al., 2016), a first study has been pre-
sented that aims at re-weighting the ensemble based
on current conditions using an evolutionary reinforce-
ment learning paradigm (XCSF/eXtended Classifier
System for Function approximation). Moreira-Matias
et al. (Moreira-Matias et al., 2013) use the error
of their base models on a sliding window to di-
rectly weigh their ensemble. In a more recent ap-
proach (Choi and Lee, 2018) change the ensemble
weights at each step based. This is again based on
the base models error on a sliding window, but is also
parametrized by a learning rate λ and a discount factor
γ which weights more recent errors higher. (Cerqueira
et al., 2017) train a second model for each base model
that predicts the expected error, this error is then used
to weight the ensemble. Later they extended this ap-
proach to also consider model diversity (Cerqueira
et al., 2018). In (Saadallah and Morik, 2021) a Deep
Deterministic Policy Gradient (DDPG) model is used
to combine univariate single horizon forecasts. The
RL uses a sliding window of past forecasts as state
and the rank of the ensemble model compared with
the base models as the reward. One approach explic-
itly designed for multi-horizon forecasting approxi-
mates optimal weights by calculating a weighted lin-
ear regression on either the training data or a slid-
ing window of past data (Galicia et al., 2019). In
(Gheyas and Smith, 2011) a set of base learners is
trained on pairwise disjoint subsets of available fea-
tures. The output of the base learners is used as input
to another model, after undergoing feature selection.
In (Casanova and Ahrens, 2009) the authors evalu-
ate equal weighting, simple skill-based weighting and
Bayesian model averaging for weather forecasting.
Most existing approaches do not take the current
input into account and instead rely on recent or his-
toric performance. We supply the input to the base
models to our weighting approach so that very recent
changes in the situation such as a unexpected rainfall
can be considered when weighting the ensemble.
3 PROPOSED ENSEMBLE
WEIGHTING APPROACH
In this section we present our approach to combine
forecasting ensembles. The basic idea of our ap-
proach is to directly weight the ensemble forecast us-
ing a neural network, instead of the usual approach of
using the ensemble forecast as input to another neu-
ral network or alternative machine learning algorithm.
First, a set of arbitrary base learners is trained. This
has the advantage that each model is trained indepen-
dently, which allows us to take advantage of hyperpa-
rameter optimization, unlike dependent frameworks
like AdaBoost.
(x,y)
Model 1
Dense
Layers
Model N...
Concat
Normalize
(e.g. softmax)
Matmul
y'
Figure 1: Ensemble weighting architecture.
The ensemble model is a neural network with two
paths. One path with an arbitrary but constant number
of base learners and the second path with a small num-
An Optimised Ensemble Approach for Multivariate Multi-Step Forecasts Using the Example of Flood Levels
389
ber of layers to predict the weighting matrix. Cur-
rently, a number of dense layers is used to predict the
optimal weighting, but the exact architecture is arbi-
trary. To calculate the final output the model does an
element-wise multiplication of the concatenated out-
puts of the base models and the weight matrix.
Figure 1 shows this architecture.
The ensemble model has the task of optimizing
the weighting for n base models and the current input
data x. The ensemble model calculates a matrix of
weights w which is normalized so that w
i, j
≥ 0 and
∑
n
i=1
w
i, j
= 1 for each forecast step j ∈ {1, . . . , h}.
This guarantees that the forecast of the ensemble
model is bounded by the minimum and maximum of
the base forecasts. Whether this is a positive or a neg-
ative constraint depends on the quality and diversity
of the base models.
This can be done in different ways, the optimal
normalization function likely depends on the distribu-
tion of model quality. We tested linear normalization,
which is defined as:
w
′
=
w − min(w)
∑
n
i=1
(w
i
− min(w))
(1)
And the softmax function:
w
′
=
exp(w)
∑
n
i=1
(exp(w
i
))
(2)
To calculate the final output the ensemble model
does an element-wise multiplication of the concate-
nated outputs of the base models and the weight ma-
trix. The meta-learner is trained on the same data as
the base models. During the training process of the
meta-learner, the base models are frozen. It is not
technically necessary to implement this with the base
models as part of the meta-learner and it may be more
computationally efficient to cache the forecasts made
by the base models.
4 DATASETS AND BASE MODELS
In this section, we first introduce our datasets and
evaluation metrics. We then describe our base models
or learners and how long the training took.
4.1 Datasets
The 5 datasets used in this paper represent the dif-
ferent water levels that we attempt to forecasts and
contain publicly available data. They all contain sen-
sor and radar data and values derived from the sensor
data. The target value of each dataset is the water
level of a river in Schleswig-Holstein, Germany. Ad-
ditionally, they contain precipitation forecasts that are
synthesized by shifting the calculated precipitation 48
hours into the past. In a production environment, this
synthetic forecast would be replaced by the ICON D2
forecast (Reinert et al., 2020). The input data for each
gauge is a subset of the nearest available sensor sta-
tions measuring air temperature, air pressure, air hu-
midity, soil moisture, evaporation, and up- and down-
stream water levels. The aggregate data and all used
source code will be made available on request. The
goal is to predict the water levels for the next 48 hours
from the past water levels and other sensor data.
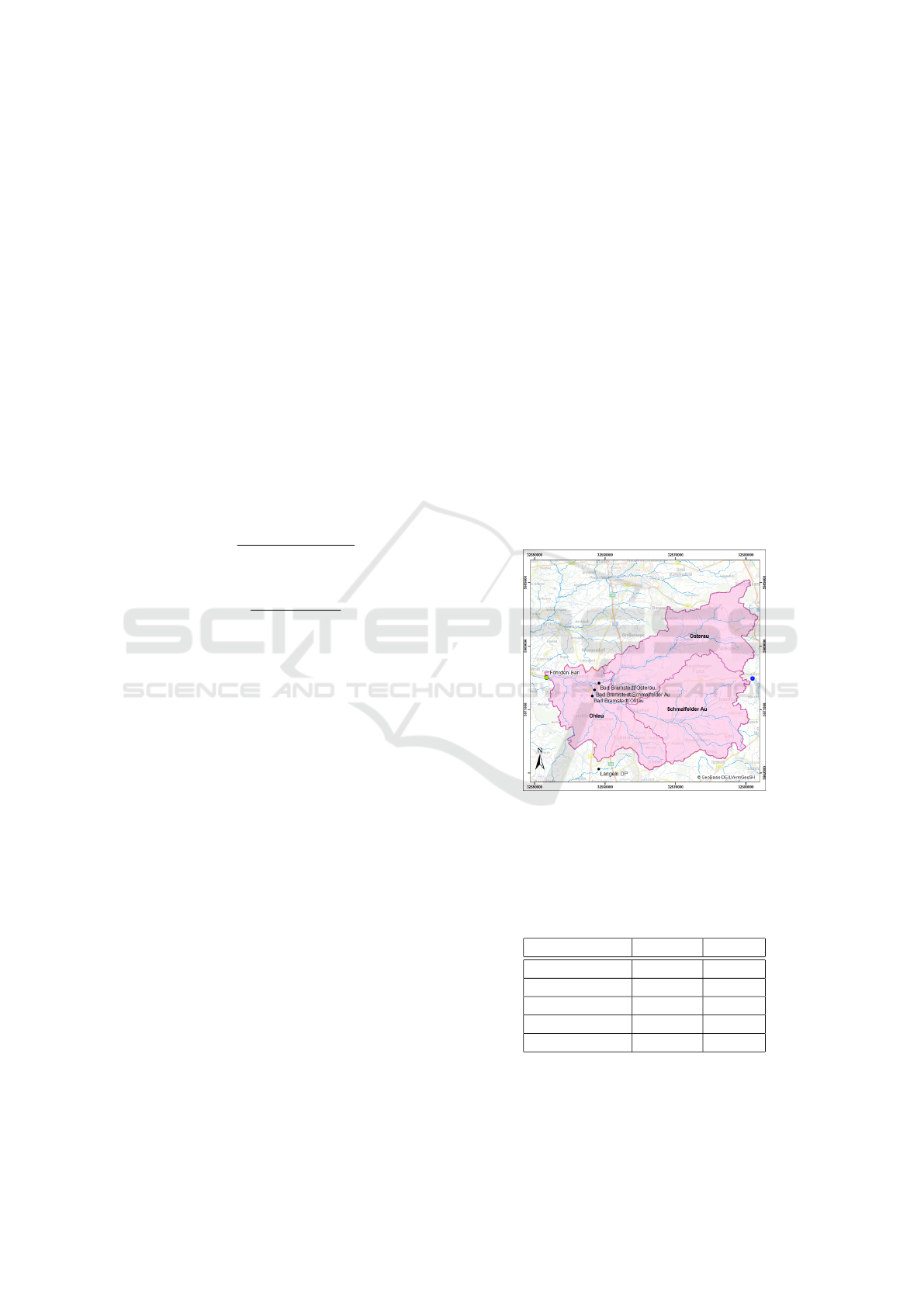
Figure 2 shows a map of the 458.6km
2
catchment
of the water level Foehrden-Barl at the river Stoer.
The green dot represents the location of the target wa-
ter level, the black dots represent the location of up-
stream water levels and the blue dot the location of
the nearest air temperature and air humidity sensor.
The three marked areas represent subcatchments for
which precipitation was calculated. For the Foehrden-
Barl dataset soil moisture and air pressure data was
used, but the sensor stations are outside the area on
the map.
Figure 2: Map of the catchment Foehrden-Barl.
All features are sampled hourly, but some derived
values like soil moisture are upsampled from daily
calculations. For training all data was standardized
to a mean of zero and a standard deviation of one.
Table 1: The five datasets used in the experiments.
Dataset Features Length
Foehrden-Barl 13 61360
Hollingstedt 9 71542
Halstenbek 5 83816
Poetrau 5 77699
Willenscharen 10 77434
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
390
4.2 Evaluation Metrics
We track several metrics for our experiments, but for
the sake of brevity and readability we only include
the Weighted Average Percentage error (WAPE) and
the Nash–Sutcliffe model efficiency coefficient (NSE)
in this paper. The WAPE of each forecast horizon is
defined as
WAPE =
∑
T
t=1
|y
t
− ˆy
t
|
∑
T
t=1
|y
t
|
(3)
with T the number of observations, y
i
the true value
and ˆy
i
the predicted value.
The NSE is a standard metric for hydrological
models. A perfect model would result in a NSE of
1, a model that just predicts the mean observed value
in a NSE of 0.
NSE = 1 −
∑
T
t=1
(y
t
− ˆy
t
)
2
∑
T
t=1
(y
t
− y)
2
(4)
with y being the mean observed value.
4.3 Base Learner
For each dataset, we trained 24 neural networks as en-
semble members. All models were trained on the first
70% of each dataset, with the following 15% parts
as validation and test set. To reduce overfitting train-
ing was stopped whenever the validation loss did not
reduce for three epochs. On average this happened af-
ter 23 epochs. Table 2 shows the (hyper-)parameters
of all base models. We exclusively used LSTM net-
works, because preliminary testing showed that they
outperform other architectures in both performance
and training speed for our datasets. On average the
MAE of models using for example a Transformer ar-
chitecture was 25% higher and models using the Aut-
oformer architecture ((Wu et al., 2022)) were 50%
higher, while taking 3-4 longer to train.
4.4 Execution Time
Training neural networks can be very expensive, so it
is important not to ignore the computational cost of
new approaches. All training was done on a single
Nvidia A100 GPU with 80GB memory. Training the
base models took on average 55s, with a minimum of
12s and a maximum of 93s. Training the ensemble
models took on average 40s, with a minimum of 10s
and a maximum of 129s. The cost of our approach of
training a neural network to combine an ensemble of
models is in the same order of magnitude as the the
cost of training a single neural network.
Table 2: Base learner parameters.
Parameter Value
Input window 144 hours
Output window 48 hours
Learning rate 0.001
Loss function MSE
Optimizer Adam
Batch size 4096
Max Epochs 100
Dropout 0.25
LSTM Layers [1,2]
LSTM Units [64,128,256]
Hidden layers [1,2]
Hidden layer units [128,256]
5 EXPERIMENTS AND RESULTS
This section contains descriptions of our experiments
and their results.
5.1 Experiment 1: Static Model Set,
Hyperparameter Optimization
For this experiment, we did a hyperparameter opti-
mization for the ensemble model with a fixed set of
base models. We used Tree-structured Parzen Esti-
mator (TPE) for sampling and trained 100 models,
minimizing the validation loss. Table 3 shows the hy-
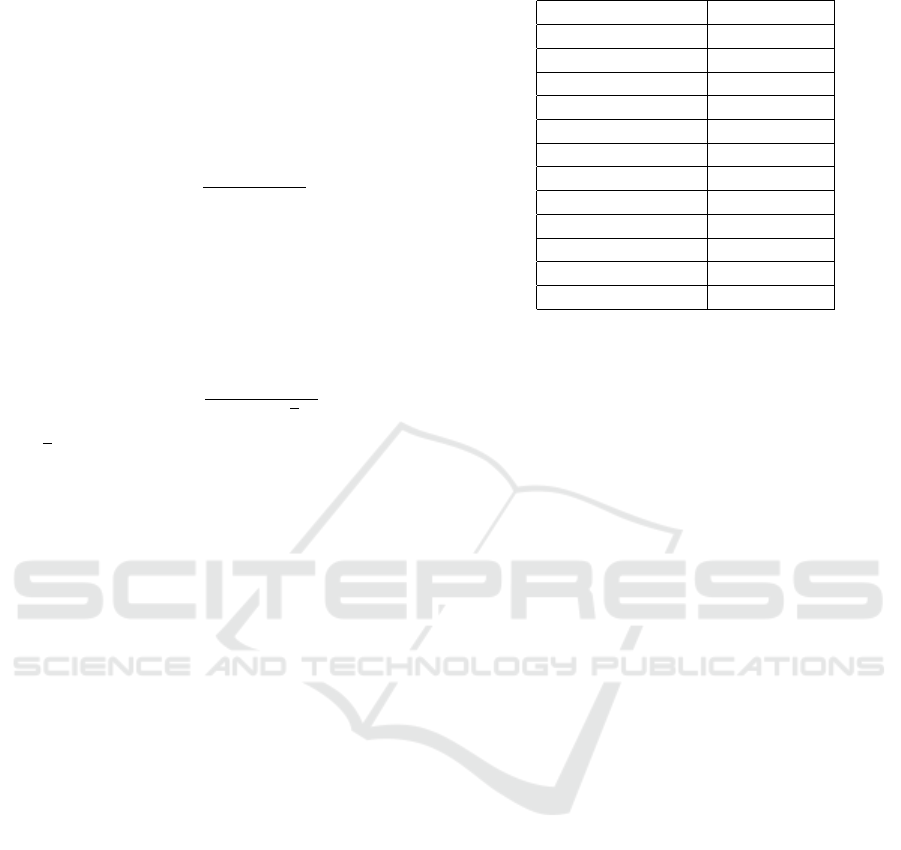
perparameter constraints. In Figure 3 the NSE val-
ues of each ensemble model, the base model and the
mean forecast of the base model set is displayed. The
ensemble model has a higher thus better NSE than
the base models with nearly all tester hyperparame-
ters, except at the water level Poetrau, where the base
models perform better with small forecast horizons.
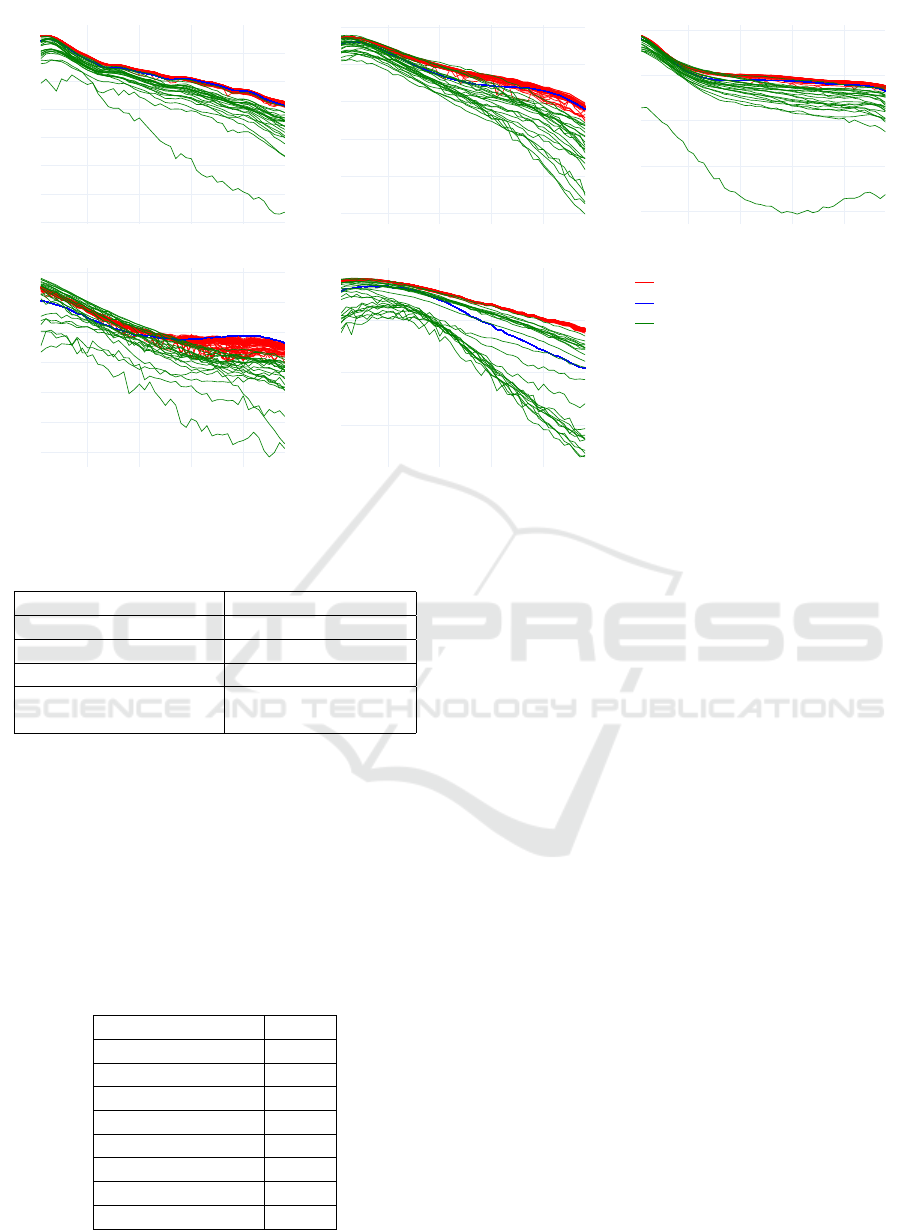
Figure 4 shows the results of the hyperparameter-
optimization. The linear/minmax normalization re-
sults in a lower validation loss for all datasets ex-
cept Poetrau. The optimal found hyperparameters dif-
fer between the datasets. There is no clear optimal
amount of hidden layers and hidden units. There is a
trend towards a low learning rate being better, but for
Foehrden-Barl a larger learning rate leads to better re-
sults. The range of the model quality of the ensemble
model is much smaller than the range of quality for
base models.
An Optimised Ensemble Approach for Multivariate Multi-Step Forecasts Using the Example of Flood Levels
391
10 20 30 40
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
10 20 30 40
0.75
0.8
0.85
0.9
0.95
1
10 20 30 40
0.6
0.7
0.8
0.9
1
10 20 30 40
0.7
0.75
0.8
0.85
0.9
0.95
1
10 20 30 40
0.85
0.9
0.95
Ensemble model
Ensemble mean
Base models
Hollingstedt validation Willenscharen validation Halstenbek validation
Poetrau validation Foehrdenbarl validation
Forecast Horizon (hours)
NSE
Figure 3: NSE for ensemble models with fixed base model set, mean of these sets and base models.
Table 3: Constraints hyperparameter optimization.
Parameter Value range
Learning rate 0.00001 ≤ 0.01
Hidden layers 0 ≤ n ≤ 2
Hidden layer units 32 ≤ n ≤ 512
Normalization function Linear normalization
or Softmax
5.2 Experiment 2: Random Model Set,
Static Hyperparameters
For this experiment, we trained 100 ensemble models
with a random set of 10 base models each. The hy-
perparameters for our ensemble models can be seen
in Table 4. Gradient Clipping was used for improved
learning.
Table 4: Ensemble model fixed parameters.
Parameter Value
Learning rate 0.002
Loss function MSE
Optimizer Adam
Batch size 2048
Max Epochs 100
Dropout 0.25
Hidden layers 2
Hidden layer units 512
Figure 5 shows the WAPE for all five datasets at
different forecast horizons. The mean WAPE of the
ensemble models is lower than the mean WAPE of
the base models for all datasets and forecasts horizons
and lower than the mean WAPE of the naive model
ensembles for all datasets and horizons except Poet-
rau with 48h. In most cases, the mean WAPE of the
ensemble models is better or comparable to the best
base model.
5.3 Discussion
Both experiments show that our approach outper-
forms both the base models and the naive ensemble
for most datasets and forecast horizons. The first ex-
periment shows that there is no clear best normaliza-
tion function. This combined with the comparatively
bad results for dataset Poetrau in the second experi-
ment is a sign that some hyperparameter optimization
may be necessary to reliably outperform naive ensem-
bles for some datasets. LSTM-Ensembles strongly
outperform single LSTM models.
While there are several studies that investigate
flood forecasting with neural networks (Tripathy and
Mishra, 2023), it is not easy to directly compare these
studies. There are two main reasons for this. First
the used data. Authors tend to study catchments and
rivers geographically close to them. Since rivers can
behave very different depending on for example size
and mean catchment slope many metrics are not di-
rectly comparable. A low MAE at a large stream is
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
392
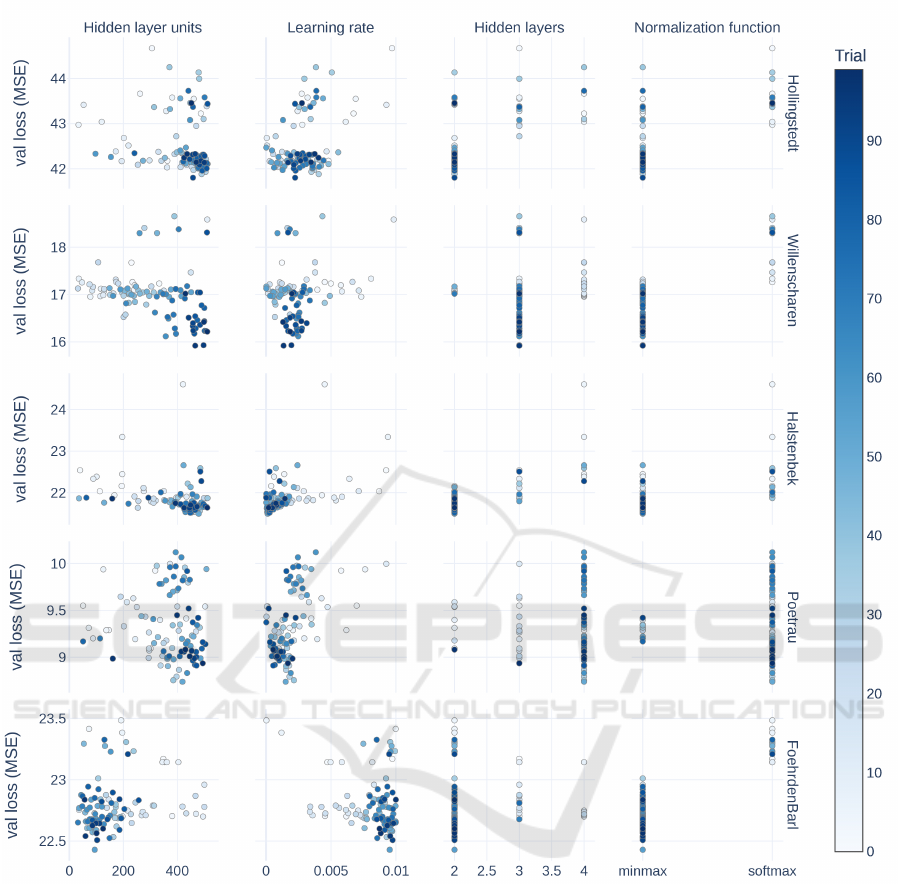
Figure 4: Validation loss for different datasets and hyperparameters.
much easier to achieve than in a small river. Addi-
tionally, the used data differs. Some only learn on
events with heavy rainfall, other on the whole dataset.
Many papers simply use precipitation and discharge
stations to predict the future discharge, others include
evaporation data and precipitation forecasts. Some
make daily forecasts, other hourly. The second obsta-
cle when comparing studies is the variety of metrics
that are used to evaluate model quality, there is no
single metric that is used in every paper. One study
found that Spatio-Temporal Attention LSTM models
(STA-LSTM) worked best for discharge forecasting
(Ding et al., 2020). They reported coefficient of deter-
mination (R
2
) values of 0.92, 0.75 and 0.84 for three
different catchments. These values interestingly are
the mean R
2
of lead times 1h to 6h. Using this metric
our ensembles with a static model set have an average
of value of:
• Hollingstedt: 0.990
• Willenscharen: 0.988
• Halstenbek: 0.967
• Poetrau: 0.965
• Foehrdenbarl: 0.986
Another study, which investigated a 329km
2
large
basin in Texas, found that synced sequence input and
output (SISO) LSTM is the best performing LSTM ar-
chitecture for flood prediction (Li et al., 2020). They
An Optimised Ensemble Approach for Multivariate Multi-Step Forecasts Using the Example of Flood Levels
393
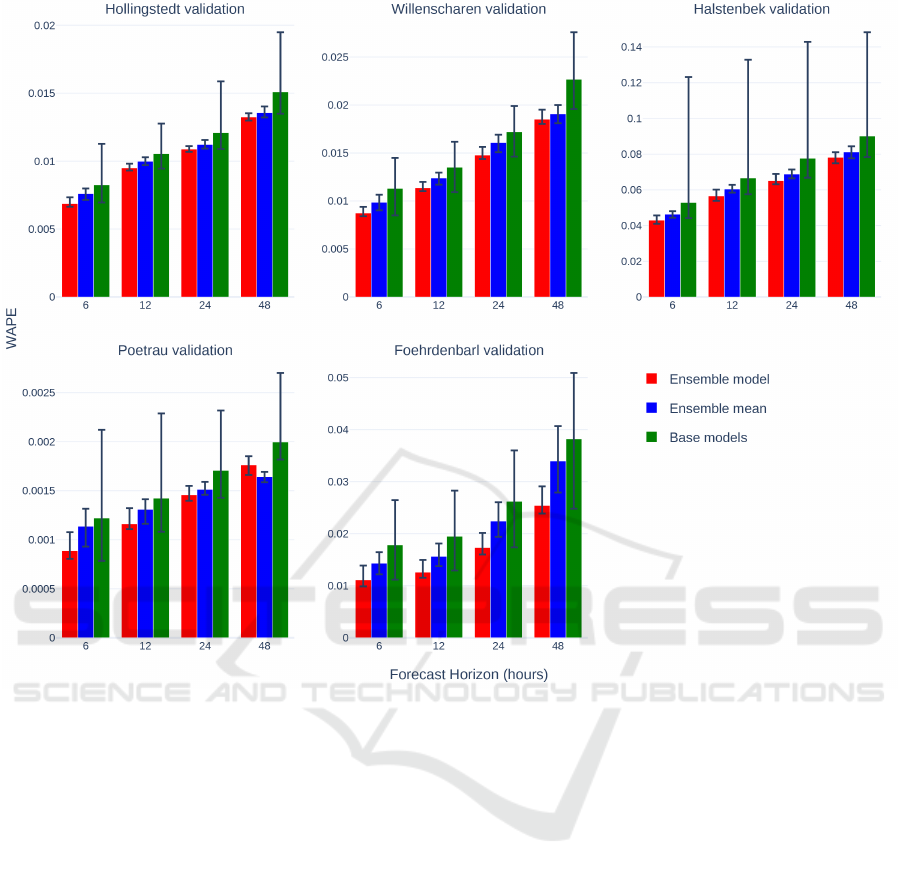
Figure 5: Mean, minimum and maximum WAPE for ensemble models with random sets of base models, mean of these sets
and base models.
use rainfall and discharge gauges sampled at 15 min-
utes as input and report an NSE of .943, but the lead
time of their forecast regrettably stays unclear. One
study, which also used precipitation forecasts, found
that context-aware attention LSTM (CA-LSTM) out-
perform regular LSTM, but are outperformed by fully
connected neural networks (FCN) for lead times up to
2h. The used data was taken from 40 flood events at a
single river. They report an average root-mean-square
error (RMSE) of 59.95 over up to 6h lead time, a met-
ric that we did not track.
6 CONCLUSION AND FUTURE
WORK
This section recaps our results and suggests some di-
rections for further research.
6.1 Conclusion
In this paper, we developed a new method of com-
bining multivariate multi-step forecast ensembles and
tested our method on water level data. Our method
outperformed naive ensembles and base learners on
most datasets and forecast horizons, but we have not
compared our approach to other state-of-the-art en-
semble approaches, because very few investigate mul-
tivariate multi-step forecasts. The first experiment
showed that the choice of hyperparameters, especially
the normalization function, has some influence on
the ensemble model quality but the variance is much
lower than for the base models. The second exper-
iment showed that our approach works random base
model sets and usually works without any hyperpa-
rameter optimization. Training the ensemble model
is very fast, taking about as long as training a single
base model with an LSTM architecture. This, com-
bined with the fact that the base models are trained
independently from the ensemble model, allowing us
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
394

to very efficiently build ensemble models that outper-
form naive ensembles and can offset bad-performing
base models. Since modern machine learning ap-
proaches often undergo a hyperparameter optimiza-
tion resulting in many decent, but not optimal model
we can use our approach to improve from those mod-
els a nearly no cost.
6.2 Future Work
Currently, both the weighting method and the model
sets are fairly naive. In future work we plan to inves-
tigate more sophisticated methods. The base models
currently share the same architecture and training data
and only differ in hyperparameters. Modern ensemble
approaches often consider model diversity when se-
lecting base models. Doing the same in our approach
could result in a fairly large improvement since the
ensemble model can only forecasts correctly if the
ground truth is between minimum and maximum base
forecast. We also have not yet investigated the influ-
ence of the size of our ensembles. Larger ensembles
could potentially perform even better but may need
different normalization functions and weighting ar-
chitectures. Another direction we would like to in-
vestigate are adaptive model sets. Using the perfor-
mance of base models on different benchmark data
as additional input would allow us to change the set
of base models. This would be useful if there is a
drift in our data. With long-term drifts being common
in hydrological data we intend to also extend our ap-
proach towards training and retraining models at run
time instead of just weighting a static model set, thus
adapting to changed environments.
ACKNOWLEDGEMENTS
The used data is mostly publicly available from DWD
(German Meteorological Service) and the LfU-SH
(Landesamt f
¨
ur Umwelt Schleswig-Holstein), kindly
aggregated by the LfU-SH. This research was sup-
ported by the Federal State of Schleswig-Holstein in
the context of the “KI-F
¨
orderrichtlinie” under grant
220 22 05 (project KI-WaVo).
REFERENCES
Casanova, S. and Ahrens, B. (2009). Oq. Monthly Weather
Review, 137(11):3811–3822.
Cerqueira, V., Torgo, L., Pinto, F., and Soares, C.
(2017). Arbitrated ensemble for time series forecast-
ing. In Machine Learning and Knowledge Discovery
in Databases, pages 478–494. Springer International
Publishing.
Cerqueira, V., Torgo, L., Pinto, F., and Soares, C. (2018).
Arbitrage of forecasting experts. Machine Learning,
108(6):913–944.
Choi, J. Y. and Lee, B. (2018). Combining LSTM network
ensemble via adaptive weighting for improved time
series forecasting. Mathematical Problems in Engi-
neering, 2018:1–8.
Ding, Y., Zhu, Y., Feng, J., Zhang, P., and Cheng, Z. (2020).
Interpretable spatio-temporal attention lstm model for
flood forecasting. Neurocomputing, 403:348–359.
Galicia, A., Talavera-Llames, R., Troncoso, A., Koprinska,
I., and Mart
´
ınez-
´
Alvarez, F. (2019). Multi-step fore-
casting for big data time series based on ensemble
learning. Knowledge-Based Systems, 163:830–841.
Gheyas, I. A. and Smith, L. S. (2011). A novel neural net-
work ensemble architecture for time series forecast-
ing. Neurocomputing, 74(18):3855–3864.
Grundmann, J., Six, A., and Philipp, A. (2020). Ensem-
ble hydrological forecasting for flood warning in small
catchments in saxony, germany.
Hu, C., Wu, Q., Li, H., Jian, S., Li, N., and Lou, Z. (2018).
Deep learning with a long short-term memory net-
works approach for rainfall-runoff simulation. Water,
10(11):1543.
Kao, I.-F., Zhou, Y., Chang, L.-C., and Chang, F.-J. (2020).
Exploring a long short-term memory based encoder-
decoder framework for multi-step-ahead flood fore-
casting. Journal of Hydrology, 583:124631.
Kratzert, F., Gauch, M., Nearing, G., Hochreiter, S., and
Klotz, D. (2021). Niederschlags-abfluss-modellierung
mit long short-term memory (lstm).
¨
Osterreichische
Wasser-und Abfallwirtschaft, 73(7-8):270–280.
Li, W., Kiaghadi, A., and Dawson, C. (2020). Explor-
ing the best sequence lstm modeling architecture for
flood prediction. Neural Computing and Applications,
33(11):5571–5580.
Moreira-Matias, L., Gama, J., Ferreira, M., Mendes-
Moreira, J., and Damas, L. (2013). Predicting
taxi–passenger demand using streaming data. IEEE
Transactions on Intelligent Transportation Systems,
14(3):1393–1402.
Morgenstern, T., Grundmann, J., and Sch
¨
utze, N. (2022).
Flood forecasting with LSTM networks: Enhancing
the input data with statistical precipitation informa-
tion.
Mosavi, A., Ozturk, P., and Chau, K.-w. (2018). Flood pre-
diction using machine learning models: Literature re-
view. Water, 10(11):1536.
Reinert, D., Prill, F., Frank, H., Denhard, M., Baldauf, M.,
Schraff, C., Gebhardt, C., Marsigli, C., and Z
¨
angl,
G. (2020). Dwd database reference for the global
and regional icon and icon-eps forecasting system.
DWD 2023Available online: https://www. dwd.
de/DWD/forschung/nwv/fepub/icon database main.
pdf (accessed on 27 January 2023).
Saadallah, A. and Morik, K. (2021). Online ensemble ag-
gregation using deep reinforcement learning for time
series forecasting. In 2021 IEEE 8
th
International
An Optimised Ensemble Approach for Multivariate Multi-Step Forecasts Using the Example of Flood Levels
395

Conference on Data Science and Advanced Analytics
(DSAA). IEEE.
Sommer, M., Stein, A., and H
¨
ahner, J. (2016). Local ensem-
ble weighting in the context of time series forecasting
using xcsf. In 2016 IEEE Symposium Series on Com-
putational Intelligence (SSCI), pages 1–8. IEEE.
Tripathy, K. P. and Mishra, A. K. (2023). Deep learning in
hydrology and water resources disciplines: concepts,
methods, applications, and research directions. Jour-
nal of Hydrology, page 130458.
Wee, W. J., Zaini, N. B., Ahmed, A. N., and El-Shafie, A.
(2021). A review of models for water level forecasting
based on machine learning. Earth Science Informat-
ics, 14(4):1707–1728.
Wu, H., Xu, J., Wang, J., and Long, M. (2022). Autoformer:
Decomposition transformers with auto-correlation for
long-term series forecasting.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
396
