
Autonomous Methods in Multisensor Architecture for Smart
Surveillance
Dani Manjah
1 a
, St
´
ephane Galland
2 b
, Christophe De Vleeschouwer
1
and Beno
ˆ
ıt Macq
1 c
1
Institute of Information and Communication Technologies, Electronics and Applied Mathematics (ICTEAM), UCLouvain,
1348 Louvain-la-Neuve, Belgium
2
UTBM, CIAD UMR 7533, F-90010 Belfort cedex, France
Keywords:
Distributed Smart Cameras Architectures, Holonic Multiagent Systems, Large-Scale Surveillance Systems,
Multisensor and Multimethod.
Abstract:
This paper considers the deployment of flexible and high-performance surveillance systems. These systems
must continuously integrate new sensors and sensing algorithms, which are autonomous (e.g., capable of
making decisions independently of a central system) and possess interaction skills (e.g., capable of exchanging
observations). For this purpose, our work proposes adopting an agent-based architecture derived from an
organizational and holonic (i.e., system of systems) multi-agent model. It leverages autonomous processing
methods, resulting in a scalable and modular multisensor and multimethod surveillance systems. A vehicle
tracking case study demonstrates the relevance of our approach in terms of effectiveness and runtime.
1 INTRODUCTION
Surveillance systems traditionally employ a multi-
sensor architecture, enhancing system survivability
against device defects or temporary occlusions (Rao
et al., 1993). Despite this, prevailing systems pre-
dominantly rely on singular, unique processing meth-
ods (Wolpert and Macready, 1997), limiting adapt-
ability and flexibility in the face of evolving contexts
and scenarios. Next-generation surveillance systems
should consist of networks with interconnected sen-
sors and methods endowed with reasoning (i.e., infor-
mation processing) and interaction skills. Although
existing architectures enable the management of com-
plex structures of sensors, they assume that methods
are designed beforehand, thereby reducing the range
of applications and system flexibility.
Our paper addresses the design of a scalable,
modular, and adaptive multisensor and multimethod
surveillance system. Our approach involves break-
ing down the system into smaller, manageable parts
like sensors and methods. Each part can operate on
its own, making decisions without needing approval
from a central authority. Also, each part can commu-
a
https://orcid.org/0000-0001-9034-0794
b
https://orcid.org/0000-0002-1559-7861
c
https://orcid.org/0000-0002-7243-4778
nicate, asking for and sharing information as needed.
Conventional software engineering techniques,
like UML, often fall short in managing the complexity
(Simon, 1976) of large-scale multi-sensor and multi-
method systems due to their foundational design con-
cepts (Rombach et al., 1993; Abbas, 2015; Wautelet
et al., 2021). In contrast, our work embraces the
concept of Multi-Agent Systems (MAS), more par-
ticularly leveraging the capabilities of Holonic Multi-
Agent Systems (HMAS). A HMAS refers to a multi-
agent system in which each agent is assigned to a self-
similar nesting structure, known as a holon. HMAS
represents a promising approach for complex system
modeling due to its capability to support the key prop-
erties of a complex system, including flexibility, in-
telligence, and scalability. This approach allows for
a more organic and responsive system architecture,
akin to living organisms, promoting autonomy and
dynamic interactions among system components. Ad-
ditionally, due to the stochastic interactions within
the real world, the agent paradigm must be aug-
mented with organizational concepts (actors, goals,
objectives, responsibilities, social dependencies, etc.)
that provide abstract patterns of interaction, ensuring
model scalability and flexibility (Ferber et al., 2003;
Cossentino et al., 2010; Abbas, 2015).
This paper focuses on designing an architecture
that facilitates autonomous Sensor Management and
Manjah, D., Galland, S., De Vleeschouwer, C. and Macq, B.
Autonomous Methods in Multisensor Architecture for Smart Surveillance.
DOI: 10.5220/0012395700003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 823-831
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
823

promotes Autonomous Methods for enhanced system
performance. To the best of our knowledge, there ex-
ists no model that guarantees such functionalities in
both sensors and methods concurrently. The contri-
butions of this paper are:
1. Design of an Organizational Holonic Agent
Architecture: accommodating multi-sensor and
multi-method systems.
2. Implementation: employing the SARL-agent
language (GALLAND et al., 2019). The link
for the multi-agent framework is available at
https://github.com/manjahdani/aptitude.
3. Experimental Demonstrations: with simple be-
haviors for image-processing algorithms while
improving the efficiency of a system.
This paper begins by discussing major related
work in smart surveillance systems in Section 2.
Next, in Section 3, we describe our system, and in
Section 4, we describe the ASPECS methodology
(Cossentino et al., 2010). In Section 5, we provide
large-scale experiments on 40 videos in The AI-City
challenge (Naphade et al., 2021) from the using our
multi-agent surveillance framework APTITUDE. We
conclude the paper with future directions and conclu-
sions in Section 6.
2 STATE OF THE ART
2.1 Surveillance Architectures
Traditionally, distributed surveillance systems are de-
signed as centralized systems with a topology con-
figuration in which the sensors are like the tentacles
of a central node (Valencia-Jim
´
enez and Fern
´
andez-
Caballero, 2006). The simplicity of the approach, its
known performances, and controllability come with
an inherent bottleneck restricting scalability. To
improve the scalability of surveillance systems, re-
searchers (Park et al., 2017; Hilal and Basir, 2015)
have focused on a multi-layer management of sen-
sors. In this hierarchical approach, the central node
decomposes the processing loads into smaller assign-
ments. The advantage is the minimization of com-
munication costs, as only the results are passed on
to the upper layers. The approach is suitable if
the sensors are homogeneous and setup in a circum-
scribed environment. In fact, the assumption fails in
most real scenarios, where the sensors and situations
are heterogeneous. For example, in a video surveil-
lance system that monitors one crossroads, it is com-
mon to have various types of camera (PTZ, Bullet,
Dome, etc.). Furthermore, they can be set at various
heights (Elharrouss et al., 2021) and have individual
goals. A solution for better adaptability could then
be a decentralized architecture allowing local con-
trol and decision making. Preferably, a hybrid archi-
tecture would provide interesting alternatives (Mi-
hailescu et al., 2018).
A common issue in the literature is to design a
surveillance system as a closed network with static
components. This assumption is being increasingly
challenged. First, the massive Internet of Things (IoT)
enables cities to become urban sensing platforms
(Perera et al., 2014) and potential users of the system.
Furthermore, it may be economically advantageous
to employ large numbers of cheaper miniaturized de-
vices (Jetson Nano, Raspberry Pi, etc.). Naturally,
this increases the probability that sensors will arrive
and leave or fail during the processes. Systems will
thus be increasingly open in the future. This means
that nodes constantly need to negotiate and self-adapt
to ensure the best coverage (Saffre and Hildmann,
2021). In (Hilal and Basir, 2015), the authors de-
signed sensors as intelligent agents (autonomous, so-
cial, proactive and reactive nodes), using the frame-
work of Belief, Desire and Intention (Wooldridge and
Jennings, 1995). This agent-oriented paradigm allows
active rather than passive cooperation of sensors. We
claim it designs best next-generation surveillance sys-
tems.
Another common point in the literature (Park
et al., 2017; Hilal and Basir, 2015; Chen et al., 2009;
Valencia-Jim
´
enez and Fern
´
andez-Caballero, 2006) is
that it falls within the scope of sensor management
and set-up experiments on simulated data or in small-
scale test-bed cases. However, to be able to move to-
ward large-scale end-to-end deployments, it is critical
that systems’ integration aspects be carefully consid-
ered (Mihailescu et al., 2018). Too often, methods are
given secondary importance in such studies. How-
ever, a portfolio of methods brings a new range of
possibilities. For instance, an ensemble of methods,
processing in parallel, could reduce the predictions’
uncertainty. Another example is that the system could
self-adapt to select a suitable method for a situation
(Figure 1b). In conclusion, in addition to working on
real datasets and scenarios, one must distinguish be-
tween sensors and methods to increase the model’s
modularity and broaden the range of applications of a
surveillance system.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
824
S02
Cameras
District
Management
S03
C10
C11
C12
IA
S01
C04
City
Management
C06
C07
C08
C09
C05
C03
C02
C01
C13
C14
Sensors
Method
Horizontal
interaction
Legend
Vertical
Contribution
Information level
Raw
Actionable
(a)
Events of interets
Tracking
Signal
acquisition
S03
c12
M1
M4
c10
M3
M2
A7
A6
A4
A1
A2
M5
A3
A5
District
Management
Detection
A8
(b)
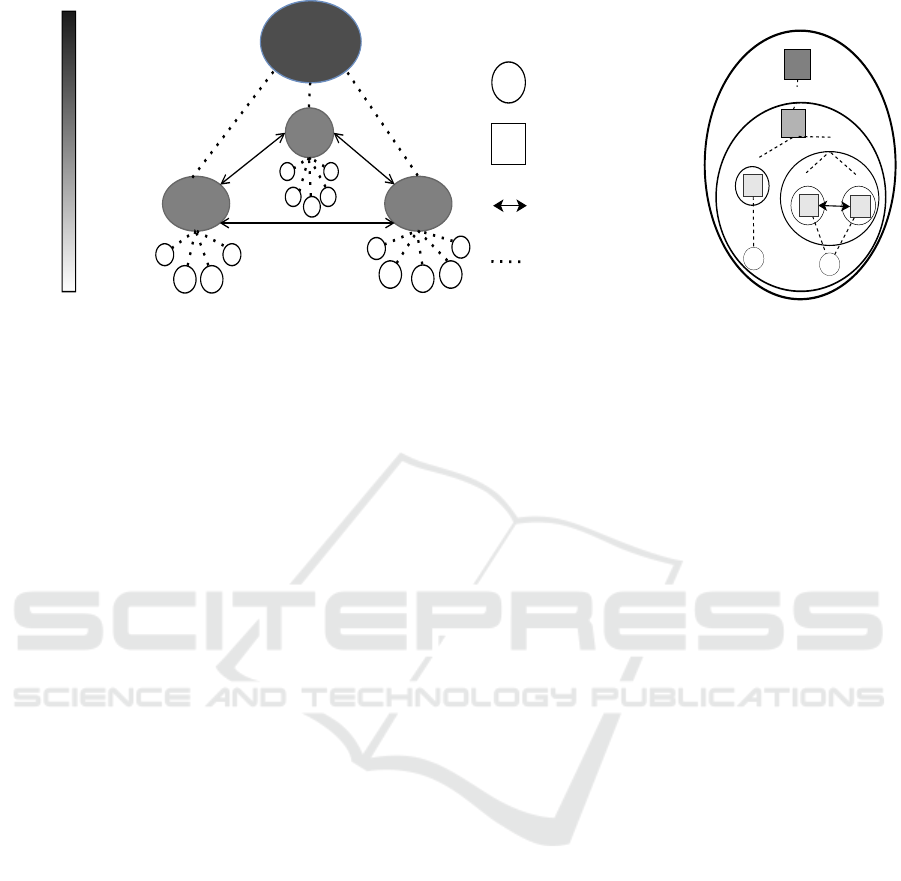
Figure 1: (Left) Figure 1a illustrates the conventional sensor management architecture. (Right) Figure 1b, inspired by Section
5.2, depicts the multi-layer signal processing in applications, highlighting the coordinated roles of Agents A3, A4, and A5,
guided by Agent A7. These figures juxtapose the complex dynamics of multisensor and multimethod systems and expose
the limitation of traditional sensor-based architectures: their inability to adaptively manage the interactions among multiple
methods without pre-established configurations. This contrast draws attention to the need for an evolution towards more
adaptive, integrated systems in signal processing, enhancing flexibility and efficiency through method autonomy and enriched
interactive capabilities.
2.2 Agent-Oriented
Software-Engineering
Large-scale multi-sensor and multi-method systems
are complex (Simon, 1976). Conventional software
engineering techniques, like UML, offer tools limited
by their foundational design concepts, like procedural
scripting (Abbas, 2015; Wautelet et al., 2021). Conse-
quently, they do not facilitate managing systems that
aim to expand both vertically (in control and infor-
mation layers) and horizontally (in physical distribu-
tion) as illustrated in Figures 1a to 1b. Engineering
should instead mimic living systems and their orga-
nization, endowing software components with auton-
omy and interaction abilities (Rombach et al., 1993;
Abbas, 2015; Wautelet et al., 2021). We refer to this
concept as the “agent” paradigm.
Multi-Agent Systems (MAS) are considered a
pertinent paradigm for modeling complex systems,
comprising connected autonomous agents working
towards a common goal in a specific environment
(Rodriguez et al., 2011). Traditional MAS models
view agents as atomic entities, limiting their appli-
cation in exhibiting hierarchical structure. Holonic
Multi-Agent Systems (HMAS), however, overcome
this limitation by utilizing ’holons’—self-similar en-
tities representing whole-part relationships, enabling
detailed and modular modeling of large-scale com-
plex systems through aggregation of nested agent ac-
complishments (Gerber et al., 1999; Rodriguez et al.,
2011). Finally, the stochastic interactions within
the real world imply that the agent paradigm must
be augmented with organizational concepts (actors,
goals, objectives, responsibilities, social dependen-
cies, etc.) that provide an abstract pattern of interac-
tion, thereby ensuring model scalability and flexibility
(Ferber et al., 2003; Cossentino et al., 2010; Abbas,
2015). The motivation of an organizational approach
to modeling complex systems is further elaborated
upon in (Ferber et al., 2003; Cossentino et al., 2010)
and formally included in the ASPECS methodology
(Rodriguez et al., 2011). It specifies the problem to
be solved using an organizational modeling approach
based on the CRIO metamodel and designs a solu-
tion based on HMAS. The problem specification for
surveillance systems is detailed in Section 4.1. Sec-
tion 4.2 provides the mapping to the HMAS.
3 PROBLEM STATEMENT
Multisensor and multimethod surveillance systems
involve large-scale networks of interconnected com-
ponents (e.g., sensors and methods) endowed with
reasoning (i.e., information processing) and interac-
tion skills. We refer to the aforementioned concept
as an agent (Wooldridge and Jennings, 1995). They
collaborate to accomplish a given objective. For in-
stance, in our case study of traffic analysis, multi-
camera cooperation is needed for city-scale tracking.
The engineering of this particularly complex system
(Simon, 1976) should meet three main specifica-
tions:
C1. Scalability and modularity. A complex surveil-
Autonomous Methods in Multisensor Architecture for Smart Surveillance
825
lance system should be able to continuously in-
tegrate more and more sensors (Valencia-Jim
´
enez
and Fern
´
andez-Caballero, 2006) and new meth-
ods. It could itself play a role in a higher-order
surveillance system. In other words, the system
should be scalable and modular; the integration
of new and heterogeneous sensing methods in par-
ticular should be facilitated.
C2. Resilience. We describe the system’s ability to
gracefully degrade and recover under stress or
when a node is removed. As a general principle,
systems employing multiple sensors and methods
exhibit greater fault tolerance. For instance, (Liu
et al., 2020) demonstrates how cameras observing
the same scene can compensate for a malfunction-
ing camera (caused by occlusion or fault) by re-
constructing missed detections. Regarding meth-
ods, employing an ensemble approach reduces
false positive/negative rates and anomalies.
C3. Openness. Traditionally systems are mostly de-
signed as closed networks. This design is in-
creasingly being challenged. The massive Inter-
net of Things (IoT) sensors have enabled cities to
become massive sensing platforms (Perera et al.,
2014). Furthermore, economically, it may be ad-
vantageous to employ large numbers of cheaper,
miniaturized devices (Jetson Nano, Raspberry Pi,
etc.), which naturally increases the probability of
agents arriving, leaving or failing during the pro-
cesses. Preliminary studies have shown that ig-
noring this need for openness may lead to severe
losses of performance(Abdelrahim et al., 2018;
Hendrickx and Martin, 2018). The management
of openness implies self-organisation capabilities,
such that the system can self-adapt if a component
enters or leaves the system.
Conventional systems generally struggle to fully
meet those specifications. Sensor management archi-
tectures with a topology similar to Fig. 1a can handle
scenarios involving multiple cameras observing the
same scene (Fig. 2) or city-scale tracking where the
smart sensors select the appropriate method for each
camera (Fig. 3). Nevertheless, their structure assumes
that the processing methods are designed beforehand
as a sequence of intertwined processes. For instance
in a tracking by detection, the tracker could be pro-
grammed to receive multiple detections. However
the integration of new behaviours (e.g., voting mech-
anisms in case of uncertainty) requires to adapt the
tracker’s module for each camera in which we want to
install the behaviour. In contrast, if each component
(tracker and detectors) is designed as an autonomous
self-adapting block, deployment of resilient and flex-
ible system behaviours can be facilitated.
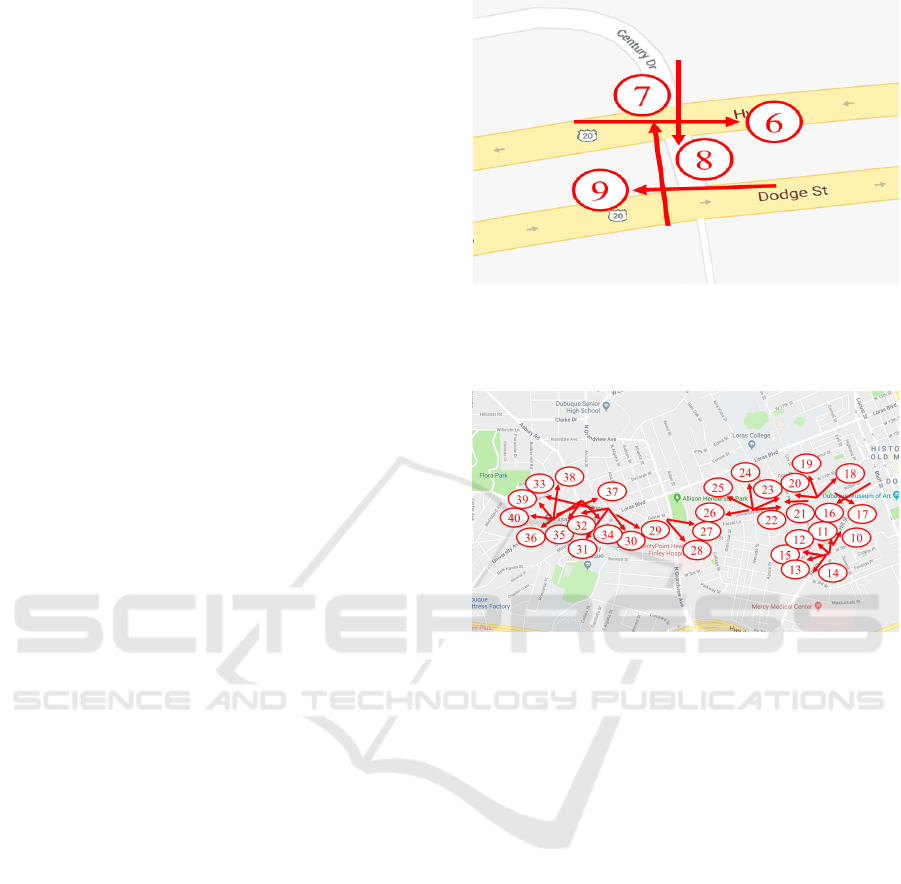
Figure 2: District 2. A network of cameras observing the
same target bolsters the system’s resilience as the failure
(e.g., fault or occlusions) of one or several cameras can be
balanced by the other functioning cameras.
Figure 3: Positioning of the cameras in the case study of
Section 5.1. A general-purpose method produces underper-
forming systems. There is no dataset large enough to cover
all aspects of a city scenario (Soviany et al., 2021).
4 HOLONIC ARCHITECTURE
As a preliminary point, the concepts of organization
and role must be defined. An Organization represents
a subsystem in which entities play roles and interact
together to achieve a shared goal in the context of this
organization. A Role is both an expected behavior to
fulfill (part of) a requirement and a status to the role’s
player in the organization. At the agent level, they
can select one or more roles to be played by them and
execute the corresponding behaviors.
Holarchy is the hierarchical structure composed
of the agents/holons of the system. Each level of this
holarchy is a possible instance of an organization that
is defined in the problem specification (as illustrated
in Section 4.1). Each holon plays one or more roles
in one or more groups (instances of organizations) on
the same level. Composition relations between super-
holons and sub-holons are then specified in accor-
dance with the contributions from the organizations
defined in the organizational hierarchy.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
826
4.1 Organizational Model
The section presents the organization cyber-physical
platform (CPP) (Fig. 4) and its roles Resource
Provider, Observer and Sensor.
CYBER-PHYSICAL PLATFORM
<<role>>
Observer
level n
level n+1
Provide data
capacity
request
<<environment role>>
Resource Provider[nb=1]
<<role>>
Sensor
request
access
1
answer
1..n
1..n
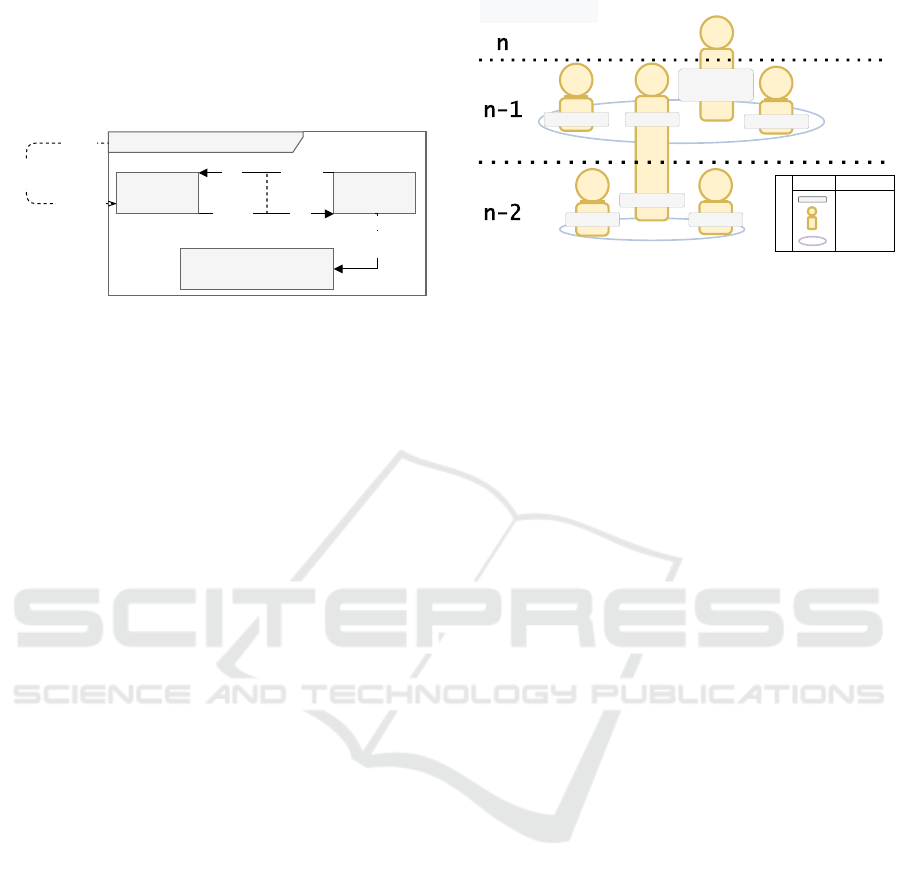
Figure 4: Organizational model of the cyber-physical plat-
form, using the ASPECS notation (Cossentino et al., 2010).
The Resource Provider role ensures a fair distribution of
the resources among all parties. The Observer role has the
capacity to deliver perceptions thanks to the data acquired
by the Sensor role. The acquisition of data could rely on
another CPP.
CPP has the capacity to provide perceptions to ex-
ternal requests. It has finite resources while ensuring
fair access to multiple surveillance operations. There-
fore, the Resource Provider role handles authoriza-
tions of legitimate interactions and management of re-
sources. For instance, it could prevent the execution
of a mission requiring more resources than available
(e.g., prevent the fusion of several methods) or the use
of a method disrespectful of a standard (i.e., privacy).
The Observer role has the capacity to provide percep-
tions after processing data given by sensors. Multi-
ple Observers can operate in parallel within the orga-
nization in collaboratively or competitively. The be-
haviour of the Sensor role is to acquire data. The ac-
quisition of data could rely on another CPP. A pseudo-
code of the behaviours is provided in the Algorithm 1
in the APPENDIX section.
4.2 Holarchy Design
A holarchy is represented in Fig. 5. The level n repre-
sents an agent providing perceptions to any requester.
At level n − 1, holons with Observer role (e.g., H1
and H2) collaborate (or negotiate) to reach a com-
mon objective (e.g., counting vehicles or pedestrians).
Each holon with an Observer role implements a spe-
cific method or algorithm to analyze the input of a
holon that endorses the Sensor role (e.g., H3). Upon
disagreement, they can negotiate a consensus (e.g.,
agreement on the type of object). The level n − 2
shows a holon (i.e., H3) that is providing input data.
The latter is composed of one or multiple agents (e.g.,
H4 and H5). That agent can be activated to fulfill H3’s
objective. The sub-holons could be a network of cam-
H0
H1
Legend
Symbol Description
Group
Agent
Role
H3
G2 : data fusion
Observer
Sensor
H2
Observer
CPP LEVEL
Resource
Provider
G1: parallel
processing
H4
Sensor
H5
Sensor
Observer
Figure 5: Holonic architecture. The representation of the
holarchy was inspired by the “cheese board”notation pro-
posed by (Cossentino et al., 2010; Feraud and Galland,
2017).
eras observing the same scene or different methods
processing a signal. In Section 5, we show the time
gained thanks to the cooperation between two holons
taking turns to process a video stream with varying
traffic density.
5 EXPERIMENTATION
5.1 Case Study
Smart cities continuously face increasing mobility
challenges due to ever-growing populations, novel
transportation modes (micro-mobility, autonomous
cars, etc.) and threats (loitering, abandoned objects,
etc.). A resilient and scalable surveillance framework
offers cities data-driven governance and could facili-
tate the advent of connected devices such as wearable
blind navigation. City-scale vehicle tracking consists
in tracking vehicles across multiple cameras both at
a single intersection and across multiple intersections
scattered over a city. It helps traffic engineers under-
stand journey times along entire corridors. It can be
used to design better intersection signal timing plans
and apply other traffic congestion mitigation strate-
gies when necessary (Naphade et al., 2021). The de-
ployment of such large-scale solutions requires both
effectiveness in tracking and efficiency in processing.
Traditionally, a surveillance company chooses and de-
ploys one tracker and one detection model across all
its solutions. The choice and development of such
algorithms are based on their prediction capacity to
outperform other existing methods. Yet, the deploy-
ment of a unique solution neglects the diversity of
contexts in a city (density, lighting, etc.). Conse-
quently, one has to compromise either by deploying
an effective but energy-consuming method or a low-
cost but poorly effective algorithms. For instance, in
Autonomous Methods in Multisensor Architecture for Smart Surveillance
827
Provide via
Sensor Role
stream
H3
Detector
H1
Tracker
H0
Camera
H4
B.G
H5
DNN
Detections
Tracking
Tracking
Detection
Detections
Tracking
Activity
OFF ON
No activity OFFON
Video stream
Request
Video stream
Detection
Request via
Observer Role
n
n-1
n-2
Single Camera Tracking
Association of detections to tracklets
Detecting objects of interests in RGB stream
Legend
n = CPP level
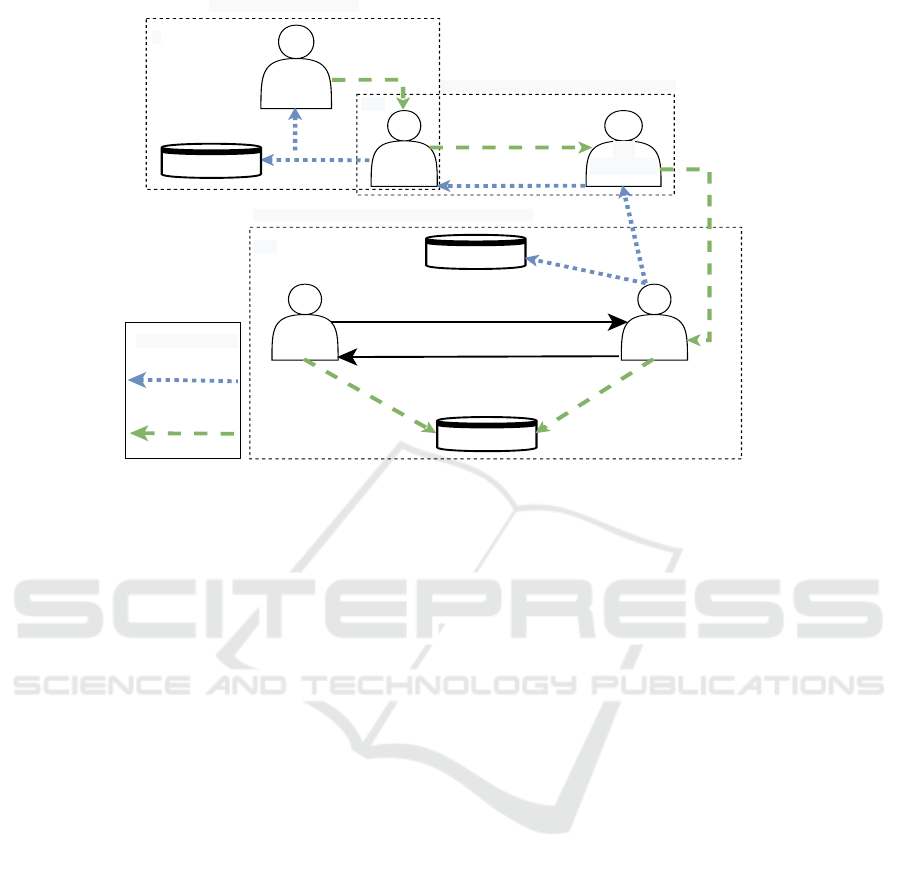
Figure 6: Depiction of Agent Interactions: Camera holon C
i
(H0) recruits a tracker T
i
(H1) and a detector D
i
(H3). Detector
D
i
engages two agents: an inter-frame differencing agent D
i1
(H4) and a deep neural network (DNN) agent D
i2
(H5). H0’s
tracking request is initially directed to H1, then to H3, which may involve H4, H5, or both. In multi-method operations, H4
notifies H5 of frame activity, leading to H5’s engagement as required.
low-density traffic (i.e., fewer objects to track), sim-
ple methods (e.g., inter-frame difference) give satis-
factory results for detecting the presence of moving
objects. Conversely, in high-density traffic (i.e., many
vehicles to track), the use of sophisticated methods
(e.g., deep neural network) must be used to achieve
good tracking performance. The following experi-
ment demonstrates how the collaboration of active
and autonomous methods uses fewer resources while
maintaining good predictive results for vehicle track-
ing.
5.2 Practical Design of Agents
The following example illustrates the chain of pro-
cesses occurring upon the decision of a camera to
track vehicles. In this scenario, the tracker estimates
the number of tracks as low and informs the detectors
that the camera might be in a low-density area (i.e.,
few objects to track). The detector adopts a strategy
that involves recruiting a method (e.g., inter-frame
differencing) that assumes the role of an activity de-
tector. When movement is detected, it alerts a deep
neural network (DNN) that is present but in a sav-
ing mode. The advantage of this approach is that the
DNN becomes active only when necessary, leading to
reduced energy consumption while maintaining effec-
tive detection performance. We present these interac-
tions in Fig. 6, and an abstract behavior is provided in
the Algorithm 2, in the APPENDIX section.
5.3 Evaluation Protocol
We evaluated the sensors and methods architecture’s
cost at scale against the single sensor approach, us-
ing 40 cameras from the AI-City challenge dataset
(Naphade et al., 2021).
5.3.1 Metrics
Higher Order Tracking Accuracy (HOTA) (Luiten
et al., 2021) is a community standard for evaluating
the effectiveness of multi-object tracking (MOT). In
summary, HOTA ∈ [0,1] measures how well the tra-
jectories of matching detections align and averages
this over all matching detections, while also penaliz-
ing detections that do not match (Luiten et al., 2021).
Efficiency is evaluated by the processing time of each
processing phase. In the adaptive approach, we added
the cost of agentification (i.e., the cost of agent inter-
actions).
5.3.2 Methods
The detector based on the inter-frame differencing is
Background Substraction from the computer-vision
library OpenCV and the deep neural network is a
YOLO v4 model (Bochkovskiy et al., 2020) trained
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
828
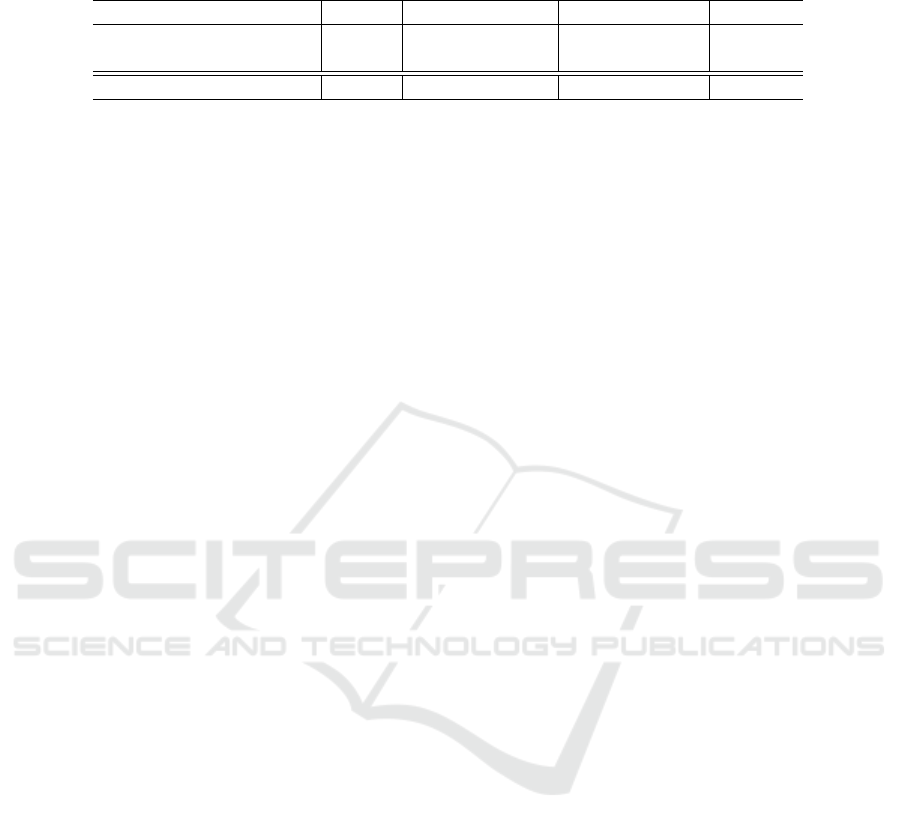
Table 1: Comparison of large-scale testing of a multi-sensor architecture vs our architecture that integrates autonomous
methods. The camera arrangement is depicted in Fig. 3.
Method HOTA Proc. Time (s) Agent Time (s) Total (s)
multisensor, DNN only 0.361 2327.05 ± 21.41 9.95 ± 0.8 2337
multisensor, multimethod 0.360 2169.40 ± 30.84 12.48 ± 0.85 2181.88
Difference 0.001 -157.65 2.53 -155.12
on the MIO-TCD dataset (Luo et al., 2018). In both
cases, the tracker is SORT (Bewley et al., 2016).
5.3.3 Test Environment
Finally, the experiments were performed on a com-
puter with an Intel(R) Core(TM) i7-8700K CPU
processor running at 3.70GHz and on Windows
10. YOLO v4 ran on GPU with NVIDIA GeForce
GTX 1080 Ti. All publicly available source
codes, selected videos and methods configurations
used in this work are available and detailed at
(https://github.com/manjahdani/aptitude).
5.4 Results
Table 1 displays the HOTA scores, processing times,
and agentification costs, alongside their respective
differences. These tests utilized 40 videos from the
cameras in the AI-City Challenge (Naphade et al.,
2021), as illustrated in Fig. 3. The processing times
mentioned are averages derived from 10 simulations.
Analysis of Table 1 indicates that the system main-
tains consistent tracking performance at scale. It also
reveals a 25% increase in agent interactions, but over-
all consumption was reduced by 7%.
6 CONCLUSION
We overcome the lack of flexibility of existing multi-
sensor architecture by adding autonomy to the meth-
ods. We propose a system in which each component
(sensors, methods) is endowed with autonomy, allow-
ing them to make decisions without referencing a cen-
tral system, and interaction skills, enabling them to
request and provide observations. Given the intrinsic
complexity of such a surveillance system, we selected
the organizational and holonic multi-agent paradigm
for modeling. The different organizations and roles
of the system are highlighted (Section 4.1) and de-
scribed, as well as the interactions and role behaviours
(Section 4.2). To validate the proposed model, a city-
scale vehicle tracking system consisting of multiple
cameras at single or multiple intersections across a
city was considered (Section 5). The experiment de-
ployed a system embodied with a portfolio of meth-
ods and provided intelligence to select the best pro-
cessing technique dynamically according to the con-
text’s density. The experimental results indicate that
by implementing simple behaviors in methods, the
system can, without prior knowledge of image pro-
cessing, offer vehicle tracking quality comparable to
the best image analysis approaches. This is achieved
with significant gains in runtime performance and
minimal agent interaction costs. Future work will in-
volve introducing an organization responsible for the
system’s learning for continual learning of methods.
ACKNOWLEDGEMENTS
Dani Manjah is supported by the Walloon region un-
der grant n°1910045 – APTITUDE by Win2WAL.
This work was also supported by Wallonia-Brussels
International, the Fund for Scientific Research, the
French Ministry of Foreign and European Affairs, and
the Ministry of Higher Education and Research within
the framework of the Hubert Curien Partnerships.
REFERENCES
Abbas, H. A. (2015). Organization of multi-agent systems:
An overview. International Journal of Intelligent In-
formation Systems, 4(3):46.
Abdelrahim, M., Hendrickx, J. M., and Heemels, W. P.
(2018). MAX-consensus in open multi-agent systems
with gossip interactions. 2017 IEEE 56th Annual Con-
ference on Decision and Control, CDC 2017, 2018-
January:4753–4758.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468.
Bochkovskiy, A., Wang, C., and Liao, H. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. CoRR, abs/2004.10934.
Chen, C.-C., Hsu, J.-M., and Liao, C.-H. (2009). Hama: A
three-layered architecture for integrating object track-
ing and location management in wireless sensor net-
works. In 2009 Third International Conference on
Multimedia and Ubiquitous Engineering, pages 268–
275.
Cossentino, M., Gaud, N., Hilaire, V., Galland, S.,
and Koukam, A. (2010). Aspecs: an agent-
Autonomous Methods in Multisensor Architecture for Smart Surveillance
829

oriented software process for engineering complex
systems. Autonomous Agents and Multi-Agent Sys-
tems, 20(2):260–304.
Elharrouss, O., Almaadeed, N., and Al-Maadeed, S. (2021).
A review of video surveillance systems. Journal
of Visual Communication and Image Representation,
77:103116.
Feraud, M. and Galland, S. (2017). First comparison of
sarl to other agent-programming languages and frame-
works. Procedia Computer Science, 109:1080 – 1085.
8th International Conference on Ambient Systems,
Networks and Technologies, ANT-2017 and the 7th
International Conference on Sustainable Energy In-
formation Technology, SEIT 2017, 16-19 May 2017,
Madeira, Portugal.
Ferber, J., Gutknecht, O., and Michel, F. (2003). From
agents to organizations: an organizational view of
multi-agent systems. In Agent-Oriented Software En-
gineering IV, volume 2935, pages 214–230, Berlin,
Heidelberg. Springer Berlin Heidelberg.
GALLAND, S., MUALLA, Y., TCHAPPI HAMAN, I.,
ZHAO, H., RODRIGUEZ, S., NAJJAR, A., and
GAUD, N. (2019). Model transformations from
the sarl agent-oriented programming language to an
object-oriented programming language. International
Journal on Agent-Oriented Software Engineering, 1–
38. Rank: Q2.
Gerber, C., Siekmann, J., and Vierke, G. (1999). Flexi-
ble autonomy in holonic multiagent systems. In AAAI
Spring Symposium on Agents with Adjustable Auton-
omy.
Hendrickx, J. M. and Martin, S. (2018). Open multi-agent
systems: Gossiping with random arrivals and depar-
tures. 2017 IEEE 56th Annual Conference on Deci-
sion and Control, CDC 2017, 2018-January:763–768.
Hilal, A. R. and Basir, O. A. (2015). A scalable sensor man-
agement architecture using BDI model for pervasive
surveillance. IEEE Systems Journal, 9(2):529–541.
Liu, Y.-C., Tian, J., Glaser, N., and Kira, Z. (2020).
When2com: Multi-agent perception via communica-
tion graph grouping. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Luiten, J., Osep, A., Dendorfer, P., Torr, P., Geiger, A., Leal-
Taix
´
e, L., and Leibe, B. (2021). Hota: A higher order
metric for evaluating multi-object tracking. Interna-
tional Journal of Computer Vision, 129:1–31.
Luo, Z., Branchaud-Charron, F., Lemaire, C., Konrad, J.,
Li, S., Mishra, A., Achkar, A., Eichel, J., and Jodoin,
P.-M. (2018). Mio-tcd: A new benchmark dataset for
vehicle classification and localization. IEEE Transac-
tions on Image Processing, 27(10):5129–5141.
Mihailescu, R. C., Davidsson, P., Eklund, U., and Persson,
J. A. (2018). A survey and taxonomy on intelligent
surveillance from a system perspective. The Knowl-
edge Engineering Review, 33(1).
Naphade, M., Wang, S., Anastasiu, D. C., Tang, Z., Chang,
M.-C., Yang, X., Yao, Y., Zheng, L., Chakraborty, P.,
Lopez, C. E., Sharma, A., Feng, Q., Ablavsky, V., and
Sclaroff, S. (2021). The 5th ai city challenge. In
The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR) Workshops.
Park, H. D., Min, O. G., and Lee, Y. J. (2017). Scal-
able architecture for an automated surveillance system
using edge computing. Journal of Supercomputing,
73(3):926–939.
Perera, C., Zaslavsky, A., Christen, P., and Georgakopou-
los, D. (2014). Sensing as a service model for smart
cities supported by Internet of Things. Transac-
tions on Emerging Telecommunications Technologies,
25(1):81–93.
Rao, B., Durrant-Whyte, H. F., and Sheen, J. (1993). A fully
decentralized multi-sensor system for tracking and
surveillance. The International Journal of Robotics
Research, 12(1):20–44.
Rodriguez, S., Hilaire, V., Gaud, N., Galland, S., and
Koukam, A. (2011). Holonic Multi-Agent Systems.
Natural Computing Series, 37:251–279.
Rombach, H. D., Basili, V. R., and Selby, R. W. (1993). Ex-
perimental Software Engineering Issues:: Critical As-
sessment and Future Directions. International Work-
shop, Dagstuhl Castle, Germany, September 14-18,
1992. Proceedings, volume 706. Springer Science &
Business Media.
Saffre, F. and Hildmann, H. (2021). Adaptive behaviour
for a self-organising video surveillance system using
a genetic algorithm. Algorithms, 14(3):1–11.
Simon, H. A. (1976). How complex are complex systems?
PSA: Proceedings of the Biennial Meeting of the Phi-
losophy of Science Association, 1976(2):507–522.
Soviany, P., Ionescu, R. T., Rota, P., and Sebe, N. (2021).
Curriculum self-paced learning for cross-domain ob-
ject detection. Computer Vision and Image Under-
standing, 204:103166.
Valencia-Jim
´
enez, J. J. and Fern
´
andez-Caballero, A.
(2006). Holonic multi-agent systems to integrate in-
dependent multi-sensor platforms in complex surveil-
lance. Proceedings - IEEE International Conference
on Video and Signal Based Surveillance 2006, AVSS
2006, pages 49–54.
Wautelet, Y., Schinckus, C., and Kolp, M. (2021). Agent-
based software engineering, paradigm shift, or re-
search program evolution. In Research Anthology on
Recent Trends, Tools, and Implications of Computer
Programming, pages 1642–1654. IGI Global.
Wolpert, D. H. and Macready, W. G. (1997). No free
lunch theorems for optimization. IEEE Transactions
on Evolutionary Computation, 1(1):67–82.
Wooldridge, M. and Jennings, N. R. (1995). Intelligent
agents: theory and practice. The Knowledge Engi-
neering Review, 10(2):115–152.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
830

APPENDIX
Data: CPP (CyberPhysicalPlatform)
Result: Managed interactions within CPP
Holarch CPP:
if receive external request for perceptions
then
ResourceProvider.manageRequest();
Observer.initiateProcessing();
end
Role ResourceProvider:
if new request or mission then
if resources available and legitimate
request then
allocate resources;
authorize interactions;
else
deny request;
end
end
Role Observer:
if initiation then
while mission is active do
Sensor.acquireData();
process data to generate perceptions;
if collaboration or competition is
needed then
interact with other Observers;
end
end
end
Role Sensor:
if requested by Observer then
if data relies on another CPP then
request data from other CPP;
end
Provide data to Observer;
end
Algorithm 1: Holonic Organizational Interactions
in CPP.
Data: costX, perfX, densityInfo
Result: Adaptive behavior based on density,
cost, and performance
Agent Algorithm - Method X:
Behavior:
if low density and costX is min then
Act as primary detector;
else
if average density and costX is min then
Act as activity detector;
if activity detected then
Notify other method;
end
else
if high density and perfX is max then
Act as primary detector;
end
end
end
Interaction & Decision Protocol:
Share cost and performance;
Evaluate current density;
Apply rules based on density, cost, and
performance;
Algorithm 2: Rule-based Interactions in Imple-
mented CPP for the level n-2.
Autonomous Methods in Multisensor Architecture for Smart Surveillance
831
