
A Three-Valued Semantics for Negotiated Situation of Multi-Agent
System Based on BATNA and WATNA
Yang Song
a
and Ken Satoh
b
National Institute of Informatics, Japan
Keywords:
Multi-Agent System, Negotiation, BATNA and WATNA, G
¨
odel Logic, Modal Logic.
Abstract:
Negotiation plays a crucial role in the dispute resolution systems. In the negotiation, the agents usually need
to compromise with each other because their preferences are different. To provide the best or acceptable
suggestion in the negotiation, BATNA (Best Alternative To a Negotiated Agreement) and WATNA (Worst
Alternative To a Negotiated Agreement) can be a method to express the preference of each agent. In this
paper, our aim is to formalize the negotiated situations of multi-agent system in a logical method based on
BATNA and WATNA. We consider each given suggestion as a possible world in modal logic, and provide a 3-
valued valuation based on G
¨
odel logic to judge whether a suggestion is over the BATNA, below the WATNA,
or between the BATNA and WATNA of each agent, which is to show whether the suggestion is acceptable,
rejectable or undecided to the agent. Moreover, by using the modal operator we can check whether there exists
a best or acceptable suggestion for all agents in a negotiated situation.
1 INTRODUCTION
Today, Online Dispute Resolution (ODR) became
more important because it could reduce the costs to
resolve the dispute and due to demand for non face-to-
face negotiation. In such systems, negotiation plays
a crucial role since the ultimate goal of the system
is to provide a satisfactory solution among disputing
agents.
Negotiation is also an important topic in multi-
agent systems (Kraus, 1997), and therefore many
studies are aimed to formalize the negotiated situ-
ation. Dunne (Dunne et al., 2005; Dunne, 2005)
considered the negotiation as resource allocation be-
tween agents, and therefore provided the definition
of resource allocation setting and the model of re-
source allocation in which several agents exchange
resources. Ragone (Ragone et al., 2006) gave a logic-
based framework to automate the one-shot bilateral
negotiation considering the demand and preference
of agents. Endriss (Endriss and Pacuit, 2006) devel-
oped a dynamic modal logic that can be used to model
scenarios where agents negotiate over the allocation.
Yang (Yang et al., 2018) forced on the system of per-
sonalized product supply chain and provided a multi-
a
https://orcid.org/0009-0006-1020-130X
b
https://orcid.org/0000-0002-9309-4602
agent negotiation mechanism based on personalized
index.
In this research, we want to provide logical se-
mantics to express the negotiated situations of multi-
agent systems in ODR. Here, we consider the negoti-
ation as a selection of several suggestions among the
agents. Normally, a lot of suggestions by deputing
agents and neutral third party are suggested in the ne-
gotiation. One agent may be glad to accept a sug-
gestion while the other agent rejects it because they
have different preference, therefore sometimes agents
need to compromise with each other. In this paper, we
consider that not each suggestion is either accepted or
rejected, but some of them are not decided at first. As
a famous example of negotiation, the case Two sis-
ters arguing over an orange (Follett, 2011) can be
considered as obtaining four suggestions as follows:
• The elder sister has the whole orange while the
younger sister has none (suggested by elder sis-
ter).
• The younger sister has the whole orange while the
elder sister has none (suggested by younger sis-
ter).
• The orange is cut into half and each sister has half
of the orange (they compromise with each other).
• The elder sister has the peel (for cooking) and the
younger has the juice (for breakfast), as the best
Song, Y. and Satoh, K.
A Three-Valued Semantics for Negotiated Situation of Multi-Agent System Based on BATNA and WATNA.
DOI: 10.5220/0012394200003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 333-340
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
333
solution.
In this example, we can see that each sister wants to
have the whole orange at first, which is their desire. If
the fourth suggestion is not mentioned, they can ac-
cept the third suggestion as the result of compromise,
otherwise they prefer the forth suggestion to solve this
negotiation. Using BATNA and WATNA, we can ex-
plain this situation. The BATNA and WATNA are im-
portant concept in negotiation and the meanings are
as follows (Notini, 2005):
• BATNA: Best Alternative To a Negotiated Agree-
ment.
• WATNA: Worst Alternative To a Negotiated
Agreement.
In this example, the BATNA of the elder sister is to
have the peel for cooking, therefore she is glad to ac-
cept the first and forth suggestion. Also, the BATNA
of the younger sister is to have the juice for breakfast,
therefore she is glad to accept the second and forth
suggestion. In this example, both of their WATNAs
are to have half of the orange (peel or juice), therefore
they can accept the third suggestion as a compromise,
while rejecting the first or second one because it is
below one sister’s WATNA.
There are several studies that employ BATNA and
WATNA to the ODR systems. Lodder (Lodder and
Zelznikow, 2005) considered calculating BATNAs as
the first step of their three-step model of the negotia-
tion support systems. Andrade (Andrade et al., 2010)
developed an architecture supported by a JADE plat-
form based on BATNA and WATNA, while consid-
ering that they are useful to take into account when
making or accepting a proposal. In this paper, we con-
sider a logical method based on BATNA and WATNA,
that provide a 3-valued valuation as follows:
• The value 1 means that the suggestion is over the
BATNA, which will be accepted by the agent.
• The value 0.5 means that the suggestion is be-
tween the BATNA and the WATNA, which may
be accepted or rejected by the agent.
• The value 0 means that the suggestion is below
the WATNA, which must be rejected by the agent.
In this paper, our aim in this paper is not how to
reach the solution, but to define what the negotiated
point is under the assumption that every information
is provided about each agent’s desire, for example.
We then try to consider how to reach such a negoti-
ated point. We give a suggestion model like modal
logic and show that we can use the modal operators
to compare the suggestions. Moreover, we provide
some formulas which can express the best suggestion
and best acceptable suggestion of one agent and of a
group. Also, we can express some features of negoti-
ation by our logic.
The structure of the rest of the paper is as fol-
lows. In Section 2, we introduce the previous stud-
ies, G
¨
odel propositional and modal logic as the tech-
nical background. In Section 3, we propose the syntax
and semantics of our logic. We regard the symbols of
agents as the atomic propositions informally, and then
provide a 3-valued suggestion model. Moreover, we
provide an explanation of the concrete example “two
sisters arguing over an orange” by our semantics In
Section 4, we consider other normal and dynamic op-
erators to extend our semantics and give the axioms.
Finally, in Section 5, we conclude and give some di-
rections for future works.
2 PREVIOUS STUDY
2.1 G
¨
odel 3-Valued Logic
In classical logic, the valuation is 2-valued, i.e., each
formula is either true or false. t is natural for humans,
however, that sometimes two values seem to be not
enough, e.g., when considering paradoxes like the liar
sentence.
G
¨
odel provided a many-valued propositional logic
with finite or infinite values between 0 and 1, where
0 and 1 are considered as false and true, respec-
tively. G
¨
odel 3-valued logic is the simplest G
¨
odel
logic whose valuation is {1, 0.5, 0}. The language
is built over a countable set of propositional variables
with binary connectives ∧, ∨, → and constant ⊥. >
is defined as ⊥ → ⊥ and the negation ¬ϕ is defined
as ϕ → ⊥. In G
¨
odel 3-valued logic, we have the fol-
lowing truth tables for the operators ¬, ∧, ∨ and →:
(Robles, 2014)
A ¬A
1 0
0.5 0
0 1
A∧B 1 0.5 0
1 1 0.5 0
0.5 0.5 0.5 0
0 0 0 0
A∨B 1 0.5 0
1 1 1 1
0.5 1 0.5 0.5
0 1 0.5 0
A→B 1 0.5 0
1 1 0.5 0
0.5 1 1 0
0 1 1 1
G
¨
odel 3-valued logic is axiomatized by the fol-
lowing axioms and rules (Robles, 2014):
• A1. A → A
• A2. (A ∧ B) → A and (A ∧ B) → B
• A3. A → (A ∨ B) and B → (A ∨ B)
• A4. [A ∧ (B ∨C)] → [(A ∧ B) ∨ (A ∧C)]
• A5. [(A → B) ∧ A] → B
• A6. A → (B → A)
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
334

• A7. (A → ¬B) → (B → ¬A)
• A8. ¬(A ∧ B) → (¬A ∨ ¬B)
• A9. ¬A → (A → B)
• A10. (A ∨ ¬B) ∨ (A → B)
• (Adj) From A and B, infer A ∧ B
• (MP) From A and A → B, infer B
• (Trans) From A → B and B → C, infer A → C
• (CI∧) From A → B and A → C, infer A → B ∧C
• (E∨) From A → C and B → C, infer A ∨ B → C
2.2 G
¨
odel Modal Logic
In modal logic, we use the modal operators and ♦
to express the necessity and possibility. ϕ stands for
“ϕ is necessary” while ♦ϕ stands for “ϕ is possible”.
A Kripke modal M = (S, R,V ) is usually used for the
semantics of modal logic, where S is a set of possible
worlds (states), R is an arbitrary function, and V is the
valuation function.
In G
¨
odel modal logic, the semantics is similar
with normal modal logic, where the frame may be
a fuzzy or a crisp Kripke frame and the valuation is
a G
¨
odel many-valued valuation. Here, since our se-
mantics is similar to the crisp model, we introduce
the semantics of crisp G
¨
odel modal logic as follows
(Rodriguez and Vidal, 2021):
Definition 1 (Semantics). A crisp G
¨
odel Kripke
model is a tuple (S, R,V ), where S is a set of possi-
ble worlds, R : S × S → {0, 1} is an arbitrary func-
tion, and V : Prop × S → [0, 1] (closed interval) is a
G
¨
odel valuation function where Prop is a non-empty
set of propositions. We can extend the valuation V
to interpretations I by the following conditions where
p ∈ Prop:
I(⊥, s)=0
I(p, s)=V (p, s)
I(¬ϕ , s)=
(
1 I(ϕ , s) = 0
0 I(ϕ , s) > 0
I(ϕ ∧ ψ , s)=min(I(ϕ, s), I(ψ, s)),
I(ϕ ∨ ψ , s)=max(I(ϕ , s), I(ψ, s)),
I(ϕ → ψ , s)=
(
1 I(ϕ , s) ≤ I(ψ, s)
I(ψ , s) Otherwise
I(ϕ , s)=in f ((I(ϕ,t) : sRt and t ∈ S), 1),
I(♦ϕ , s)=sup((I(ϕ , t) : sRt and t ∈ S), 0),
The axioms for modal operators are shown as fol-
lows: (Rodriguez and Vidal, 2021)
• K
: (ϕ → ψ ) → (ϕ → ψ )
• K
♦
: ♦(ϕ ∨ ψ) → (♦ϕ ∨♦ψ)
• T
: ϕ → ϕ
• T
♦
: ϕ → ♦ϕ
• 4
: ϕ → ϕ
• 4
♦
: ♦♦ϕ → ♦ϕ
• B
1
: ϕ → ♦ϕ
• B
2
: ♦ϕ → ϕ
• 5
1
: ♦ϕ → ♦ϕ
• 5
2
: ♦ϕ → ϕ
• D : ♦>
3 LANGUAGE AND SEMANTICS
3.1 Language
Usually, the symbol of agent is sometimes used as a
subscript to combine the modal operator to the for-
mula, however, the propositions are usually indepen-
dent from agents. In this paper, we combine the
agents and the atomic propositions, i.e., we use the
symbol of agents as the propositions and then provide
the language of our logic.
Definition 2 (Language). The language L is written
as follows in BNF:
L 3 ϕ ::= i|⊥|ϕ ∧ ϕ|ϕ ∨ ϕ|ϕ → ϕ |ϕ |♦ϕ
where i ∈ Ag and Ag is a non-empty set.
We consider the meaning of the elements in syntax as
follows where i, j ∈ Ag:
• i means that agent i accepts the suggestion.
• Ag is a set of propositions and each element i ∈ Ag
means that “agent i accepts the suggestion”.
• ⊥ can be considered as an agent that rejects all
suggestions.
• i ∧ j means that agent i and j accept the sugges-
tion.
• i ∨ j means that either agent i or j accepts the sug-
gestion.
• i → j means that if agent i accepts the suggestion,
then agent j will also accept the suggestion.
• i means that agent i accepts all given sugges-
tions.
• ♦i means that agent i accepts some given sugges-
tion.
Remark 1. In our research, the idea that using the
symbol of agents as the propositions came from
˚
Agotnes (
˚
Agotnes et al., 2011). However, here we
provide different readings.
A Three-Valued Semantics for Negotiated Situation of Multi-Agent System Based on BATNA and WATNA
335

Here, we define the negation as ¬ϕ ≡ ϕ → ⊥ and
> ≡ ⊥ → ⊥ as normal logic. Therefore, we can read
the formula ¬i and > as follows:
• ¬i means that agent i rejects the suggestion.
• > can be considered as an agent that always ac-
cepts all suggestions.
Remark 2. It may seem strange that we don’t define
suggestions in the language. Actually, we consider
the suggestions as possible worlds, therefore “agent i
accepts the suggestion” is the same as “proposition i
is valid in the possible world” in modal logic.
3.2 Semantics
In the negotiation, each agent will accept it, reject it
or hesitate for a given suggestion, therefore we can
provide a 3-valued valuation as follows
• The value 1 means that the suggestion is over the
BATNA, which will be accepted by the agent.
• The value 0.5 means that the suggestion is be-
tween the BATNA and the WATNA, which may
be accepted or rejected by the agent.
• The value 0 means that the suggestion is below
the WATNA, which must be rejected by the agent.
Then, we provide our suggestion model based on
G
¨
odel 3-valued as follows:
Definition 3 (Suggestion model). A suggestion
model M is a pair (S,V ), where S is a non-empty finite
set of possible worlds, and V : Ag × S → {1, 0.5, 0} is
a 3-valued valuation.
Semantically speaking, we read the model as follows:
• the set of possible worlds S is the set of given sug-
gestions in the system;
• the 3-valued valuation expresses whether each
suggestion is over BATNA, between BATNA and
WATNA or below WATNA of each agent as we
showed before.
Definition 4 (Interpretation). Given a suggestion
model M = (S,V ), we can extend the valuation V to
interpretations I by the following conditions:
I(⊥, s)=0
I(i, s)=V (i, s)
I(¬ϕ , s)=
(
1 I(ϕ , s) = 0
0 I(ϕ , s) ≥ 0.5
I(ϕ ∧ ψ , s)=min(I(ϕ, s), I(ψ, s)),
I(ϕ ∨ ψ , s)=max(I(ϕ , s), I(ψ, s)),
I(ϕ → ψ , s)=
(
1 I(ϕ , s) ≤ I(ψ, s)
I(ψ , s) Otherwise
I(ϕ , s)=min(I(ϕ ,t) : t ∈ S),
I(♦ϕ , s)=max(I(ϕ , t) : t ∈ S),
Remark 3. In this research, we define the sugges-
tion model considering the Kripke model, however,
we don’t define the relation R because we consider
that all suggestions are shown to all agents, therefore
they can judge every suggestion is over BATNA, be-
tween BATNA and WATNA, or below WATNA, and
moreover they can compare them.
As we use a G
¨
odel 3-valued valuation, there are
some important differences from classical (modal)
logic:
• Double negation cannot be removed. Actually,
¬¬i here means that agent i may accept the sug-
gestion (suggestion s is over i’s WATNA) be-
cause from semantics we can see I(¬¬i, s) = 1 iff
I(¬i, s) = 0 iff I(i, s) ≥ 0.5.
• ϕ ∧ ψ is not the same as ¬(¬ϕ ∨ ¬ψ ). One coun-
terexample is that, assume I(ϕ, s) = I(ψ , s) = 0.5,
then we have I(ϕ ∧ ψ, s) = 0.5 while I(¬(¬ϕ ∨
¬ψ), s) = 1. Also, ϕ ∨ ψ and ¬(¬ϕ ∧ ¬ψ) are
different and the counterexample is similar.
• ϕ is not the same as ¬♦¬ϕ. one counterexam-
ple is that, assume S = {s} therefore I(ϕ , s) =
I(♦ϕ , s) = I(ϕ , s). Let I(ϕ , s) = 0.5, then we have
I(ϕ , s) = 0.5 while I(¬♦¬ϕ, s) = 1. Also, ♦ϕ
and ¬¬ϕ are different and the counterexample
is similar.
Remark 4. Actually, there exist other 3-valued log-
ics, e.g., strong Kleene 3-valued logic, that can also
be used as a 3-valued valuation. In our research, the
main reason we choose G
¨
odel three-valued logic in
our semantics is that we consider that the formula
i → i should always hold (it is not a tautology in strong
Kleene logic).
From the interpretation, we can define the satis-
faction relation |= as model logic as follows:
M, s |= ϕ iff I(ϕ, s) = 1
Also, we can give a weaker relation as:
M, s |=
w
ϕ iff I(ϕ, s) 6= 0
As we remarked, we can see that M, s |=
w
ϕ iff
M, s |= ¬¬ϕ.
By this semantics, we can formalize some statements
as follows:
• agent i will accept suggestion s (suggestion s in M
is over i’s BATNA): M, s |= i.
• agent i may accept suggestion s (suggestion s in
M is over i’s WATNA): M, s |=
w
i.
• agent i may accept and may reject suggestion s
(suggestion s in M is between i’s BATNA and
WATNA): M, s 6|= i and M, s 6|= ¬i.
• group G will accept suggestion s (suggestion s is
over the group G’s BATNA): M, s |=
V
i∈G
i.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
336

Moreover, we can define M |= ϕ and |= ϕ as follows:
M |= ϕ iff for all s ∈ S that M, s |= ϕ
|= ϕ iff for all M that M |= ϕ .
By using such definition we can express the fea-
ture of the all given suggestions in model M as fol-
lows:
• agent i will accept each given suggestion (all sug-
gestions in M are over i’s BATNA): M |= i.
• agent i may accept each given suggestion (all sug-
gestions in M are over i’s WATNA): M |=
w
i.
• agent i will accept at least one suggestion s (there
exists some suggestion that over i’s BATNA):
M |= ♦i.
• the features for a group of agents are similar as
above.
3.3 Best Suggestion and Best
Acceptable Suggestion
One of the advantage of our logic is that, using our
semantics, we can define the best suggestion and best
acceptable suggestion by formulas as follows:
Definition 5 (Best suggestion). In a suggestion
model, if M, s |= ♦i → i, then suggestion s is (one of)
the best suggestion for agent i in model M. And for a
group G ⊆ Ag, if M, s |=
V
i∈G
(♦i → i), then sugges-
tion s is (one of) the best suggestion for group G in
model M.
We explain why we define the above semantically.
M, s |= ♦i → i means that I(♦i → i, s) = 1, which
holds if and only if I(♦i, s) ≤ I(i, s). I(♦i, s) stands
for the biggest value of agent i among the set of sug-
gestions S, therefore I(♦i, s) ≤ I(i, s) means that there
doesn’t exist a better suggestion than s, thus s is con-
sidered as (one of) the best suggestion. The consider-
ation of the best suggestion for group G is similar.
However, sometimes even the best suggestion will
also be rejected by the agent since it may be below
the WATNA of this agent. This case occurs when
I(♦i, s) = 0, in other words, all of the suggestions are
below the WATNA therefore every suggestion is the
best suggestion and would be rejected. To avoid this
case, we can define the best acceptable suggestion as
follows:
Definition 6 (Best acceptable suggestion). In a sug-
gestion model, if M, s |= ♦i → i ∧ ¬¬i, then sugges-
tion s is the best acceptable suggestion for agent i
in model M. And for a group G ⊆ Ag, if M, s |=
V
i∈G
(♦i → i ∧ ¬¬i), then suggestion s is the accept-
able best suggestion for group G i in model M.
Here, we add the condition ¬¬i to express the accept-
able. The reason is that we read M, s |= ¬¬i as “agent
i may accept the suggestion s” in our semantics.
There are some properties for the best suggestion
and best acceptable suggestion.
• A best acceptable suggestion is also a best sugges-
tion for an agent or a group. It is easy to see from
the two definitions.
• In every model, there always exists at least one
best suggestion for each agent, while there may
not exist one for a group. The reason is that by
the semantics there always exist s ∈ S that for one
agent i: I(i, s) = I(♦i, s), while a group of agents
may not have the same best suggestion.
• In every model, there may exist more than one
best acceptable suggestion and may not exist one
for an agent or a group. The counter case is that
we showed above if I(♦i, s) = 0.
• If I(i, s) = 1 (M, s |= i), then suggestion s must be
one of the best (acceptable) suggestions for agent
i.
• If I(i, s) = 0 (M, s |= ¬i), then suggestion s cannot
be the best acceptable suggestion for agent i (but
may be the best suggestion).
Similar to the definition of best suggestion, we can
also define the worst suggestion as follows:
Definition 7 (Worst suggestion). In a suggestion
model, if M, s |= i → i, then suggestion s is (one of)
the worst suggestion for agent i in model M. And for
a group G ⊆ Ag, if M, s |=
V
i∈G
(i → i), then sug-
gestion s is (one of) the worst suggestion for group G
i in model M.
The reason for this definition is similar since I(i, s)
stands for the smallest value of agent i among the set
of suggestions S.
We can give some meaningful formula by syntax
to express the property of the negotiation as follows:
• 6|= i ∨ ¬i: a suggestion is not either accepted or
rejected, because it may be not decided(0.5).
• ¬(i ∧ ¬i): a suggestion can not be accepted and
rejected at the same time.
• (♦(i ∧ ¬ j) ∧ ♦(¬i ∧ j) ∧ ♦((♦i → i) ∧ (♦ j →
j))) → ♦(i ∧ j): we can read it as “if there exists
a suggestion that over i’s BATNA while below j’s
WATNA, and there exists a suggestion that below
i’s WATNA while over j’s BATNA, and there ex-
ists a best suggestion for group i and j, then there
exists a suggestion over both i and j’s BATNA”.
• Also, we can prove that these formulas hold in all
suggestion models.
A Three-Valued Semantics for Negotiated Situation of Multi-Agent System Based on BATNA and WATNA
337
3.4 Axiomatization
As a special case of G
¨
odel modal logic, the axiom-
atization and proof theory can be easily inferred by
the proof of general form (Caicedo and Rodr
´
ıguez,
2015). Therefore, we don’t show the soundness and
completeness in this paper. Instead, we provide the
new readings of some axioms of S5 G
¨
odel crisp model
as follows, which are to show that our interpretation
is a proper reading for G
¨
odel modal logic.
• The K
axiom (i → j) → (i → j) can be
considered as “ if agent i accepts a suggestion then
j will also accept it for all suggestion, then if i
accepts all suggestions then j will also accept all
suggestions”.
• The K
♦
axiom ♦(i ∨ j) → (♦i∨♦ j) can be consid-
ered as “ if there exists a suggestion either agent
i or j accepts, then there exists a suggestion that i
will accept or there exists a suggestion that j will
accept”.
• The T
axiom i → i can be considered as “if
agent i accepts all given suggestions, then i will
accept this suggestion”.
• The T
♦
axiom i → ♦i can be considered as “if
agent i accepts this suggestions, then i will accept
some given suggestion”.
3.5 Example
Here, we use a concrete example, two sisters argu-
ing over an orange that we have shown in Section 1,
to explain our semantics. We mention the four given
suggestion again as the possible worlds in the model
as follows:
• s
1
: The elder sister has the whole orange while the
younger sister has none.
• s
2
: The younger sister has the whole orange while
the elder sister has none.
• s
3
: Each sister has half of the orange.
• s
4
: The elder sister has the peel while the younger
sister has the juice.
We consider that there are three steps in this negotia-
tion.
• Firstly, both sisters want to have the whole orange
and suggestions s
1
and s
2
are suggested. We write
the model M
1
in Figure 1:
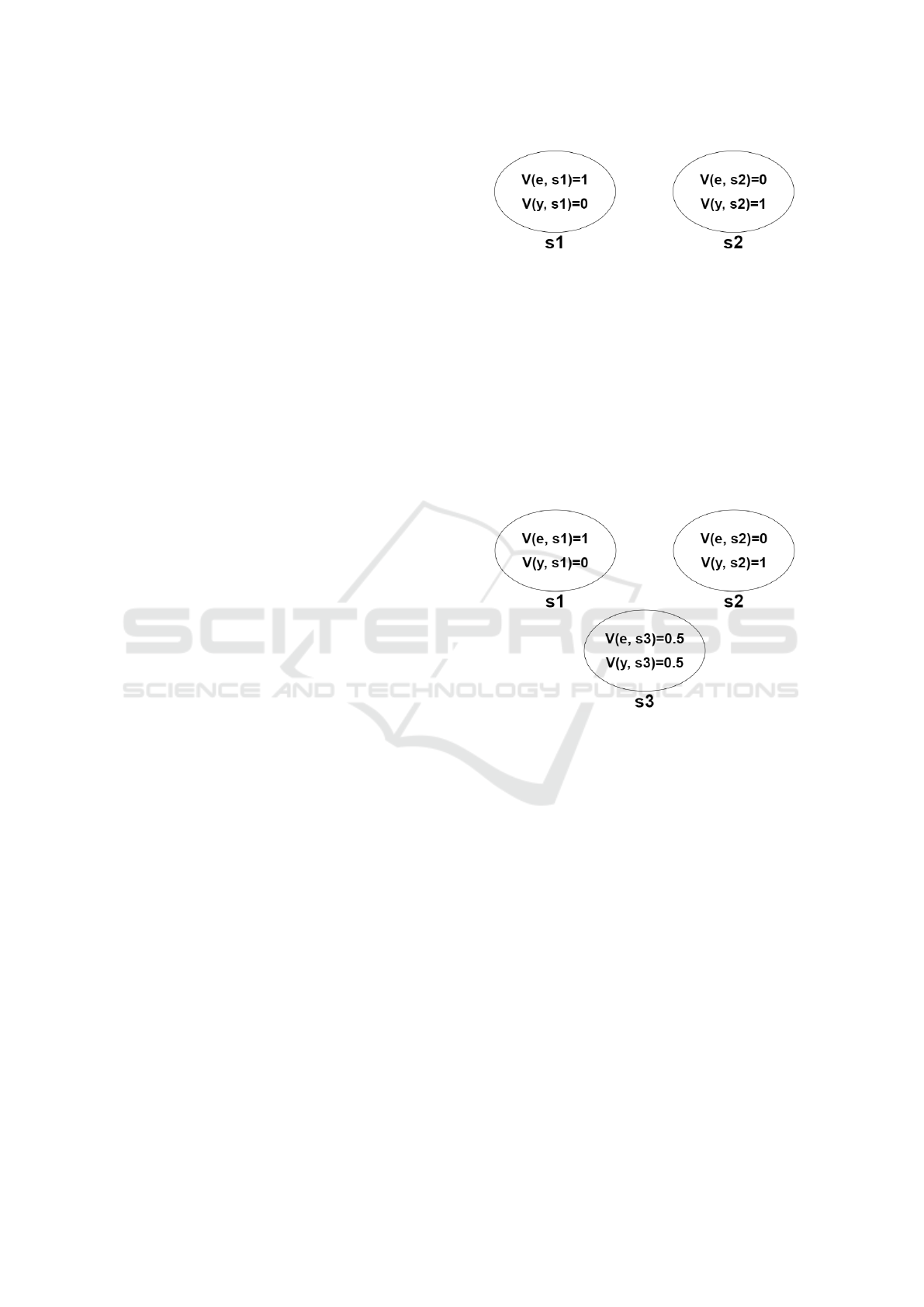
Here, e stands for the agent “elder sister” and y
stands for the agent “younger sister”. For sugges-
tion s
1
is over e’s BATNA and below y’s WATNA,
we have V (e, s
1
) = 1 and V (y, s
1
) = 0. Also, since
suggestion s
2
is over y’s BATNA and below e’s
Figure 1: First model: M
1
.
WATNA, we have V (e, s
2
) = 0 and V (y, s
2
) = 1.
We can see that M
1
6|= ♦(e ∧ y) and M
1
6|=
w
♦(e ∧
y), which means that there doesn’t exist a sugges-
tion that is over both sisters’ BATNAs or WAT-
NAs, therefore they cannot get a solution in the
first step. Also, in model M
1
, M
1
6|= ♦((♦e →
e) ∧ (♦y → y)), which means that there is no best
suggestion for both sisters at the first step.
• Secondly, sisters notice that they need a compro-
mise thus suggestion s
3
is provided. The second
model is shown in Figure 2.
Figure 2: Second model: M
2
.
Since suggestion s
3
is between both sisters’ BAT-
NAs and WATNAs, we have V (e, s
3
) = V (y, s
3
) =
0.5. In model M
2
, we have M
2
6|= ♦(e ∧ y) but
M
2
|=
w
♦(e ∧ y), which mean that there doesn’t
exist a suggestion that over sisters’ BATNAs but
exists one over their WATNAs in the second step.
Also, M
2
6|= ♦((♦e → e) ∧ (♦y → y)), which
means that there is no best suggestion for two sis-
ters.
• Finally, sisters notice the BATNA of each other
therefore s
4
is suggested. The third model is
shown in Figure 3.
Since suggestion s
4
is over(just) both sisters’
BATNA, we have V (e, s
4
) = V (y, s
4
) = 1. In
model M
3
, we have M
3
|=
w
♦(e∧ y), which means
that there exists a suggestion over both sisters’
BATNA in the final step. Also, M
3
|=
w
♦((♦e →
e) ∧ (♦y → y)), which means that there exists a
best suggestion for both sisters.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
338
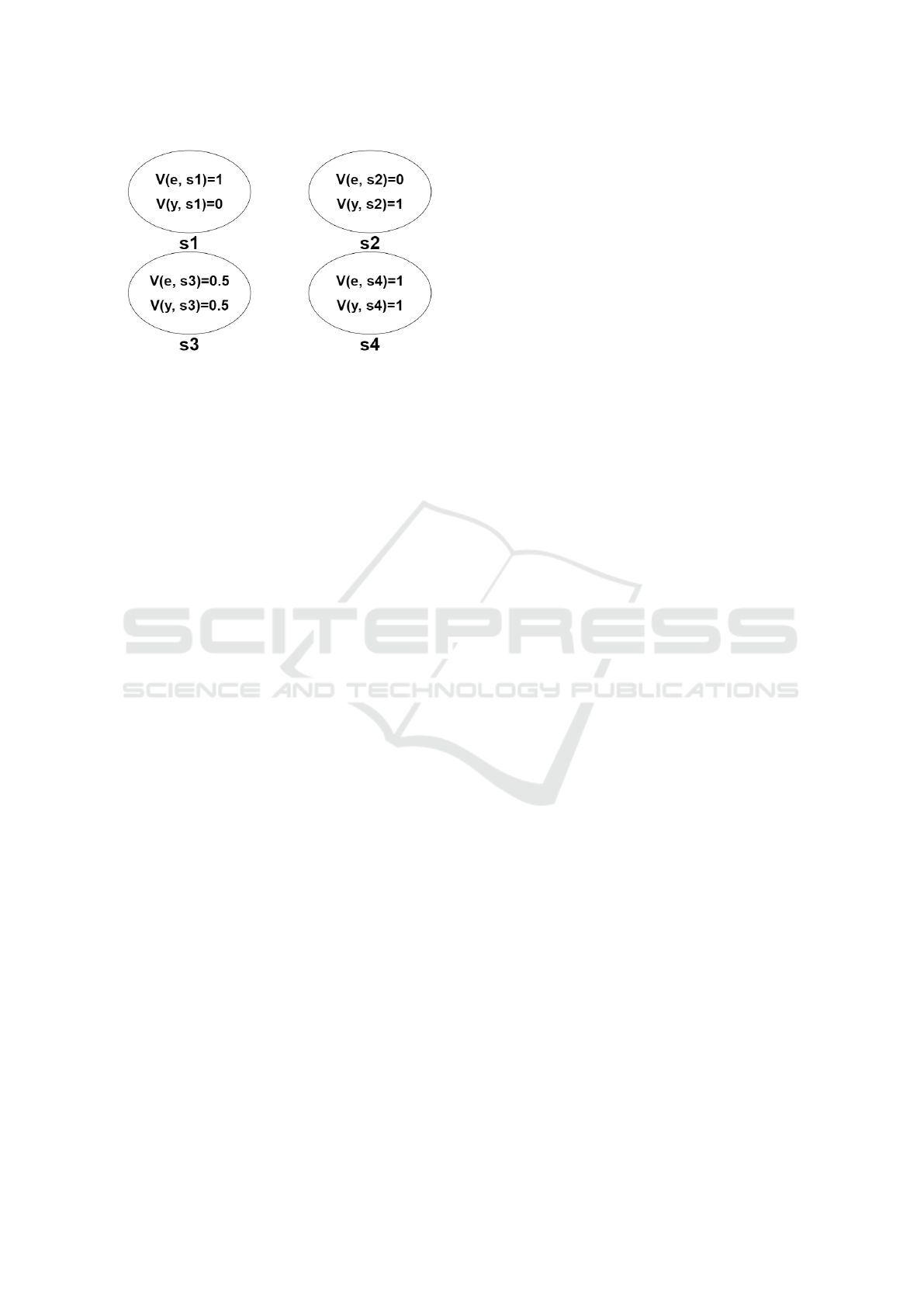
Figure 3: Third model: M
3
.
4 NEW OPERATORS
In Section 3.2, we formalize the statement “agent i
may accept or reject suggestion s” as M, s 6|= i and
M, s 6|= ¬i by semantics. However, we cannot ex-
press this statement by syntax using the operators
¬, ∧, ∨, →. Therefore, we want to add a new operator
to express such suggestions.
Since the negation ¬ is not symmetrical, a natural
idea is to define a new negation ∼ as a dual of ∼.
I(∼ ϕ , s)=
(
1 I(ϕ , s) ≤ 0.5
0 I(ϕ , s) = 1
Remark 5. Actually, Baaz (Baaz, 1996) gave this
definition of negation operator already in the last of
the paper in G
¨
odel infinite-valued logic. However, the
main he studied was the operator 4 which is defined
as follows:
I(4ϕ , s)=
(
1 I(ϕ , s) = 1
0 Otherwise
It is easy to see that 4ϕ ≡ ¬ ∼ ϕ and ∼ ϕ ≡ ¬4ϕ.
The reason we don’t use operator 4 is, from the se-
mantics we can see that M, s |= ϕ iff M, s |= 4ϕ, thus
we cannot distinguish the readings of two formulas in
syntax since both i and 4i should be read as “agent
i will accept the suggestion”. However, since we can
use 4 and ¬ to express the operator ∼, later we will
provide the axioms of ∼ from the axioms of 4 in that
paper.
By this definition, we read the ∼ i as “agent i
may reject the suggestion (the suggestion is below the
BATNA of agent i)”. And therefore, we can express
the statement “agent i may accept or reject sugges-
tion” by formula ¬¬i∧ ∼ i.
Also, we have some axioms of ∼ which comes
from the axioms of 4 (Preining, 2010; B
´
ılkov
´
a et al.,
2022):
• ¬ ∼ ϕ ∨ ¬¬ ∼ ϕ
• ¬ ∼ (ϕ ∨ ψ) → (¬ ∼ ϕ ∨ ¬ ∼ ψ)
• ¬ ∼ (ϕ → ψ) → (¬ ∼ ϕ → ¬ ∼ ψ )
• ¬ ∼ ϕ → ϕ
• ¬ ∼ ϕ → ¬ ∼ ¬ ∼ ϕ
• From ϕ infer ¬ ∼ ϕ
Also, since we consider the G
¨
odel 3-valued logic,
there exists other rule for example:
From ∼ (ϕ → ψ ) and ∼ (ψ → χ), infer ϕ
5 CONCLUSION AND FUTURE
WORK
In this paper, we provided a 3-valued logical seman-
tics to express the negotiated situation based. We di-
vide the suggestions to three –must be accepted, must
be rejected, may be accepted while may be rejected–
by comparing it with BATNA and WATNA of each
agent. We provided our semantics by using the sug-
gestion model like the Kripke model, where we regard
the possible worlds as suggestions and propositional
variables as names of agents. Then, we formalized
some statements of negotiation in our semantics and
syntax, e.g., the best suggestion, and gave an example
to show how we define a negotiated situation by our
semantics. Later, we provide some new operators to
express the statement that cannot be shown by normal
operator, and finally, we showed that our semantics
can express some negotiated states and situations by
considering a concrete example.
Unfortunately, in this research, our semantics is
based on G
¨
odel modal logic and the axioms of the
operators have been already studied. However, in this
paper, we provide an informal reading of modal logic
therefore we show that negotiated states can be shown
by the basic frame which can be considered as an S5
Kripke frame. Therefore, we gave a new perspective
to the study of negotiation and the multi-agent system
of modal logic.
Other future works remained as follows:
• In this paper, we use the 3-valued valuation based
on BATNA and WATNA. One of the future direc-
tions is to consider the valuation as the evaluation
of suggestions from 0 to 1 and to give the bound of
BATNA and WATNA. For example, if we define
the bound of WATNA as 0.3 and that of BATNA
is 0.8, suggestions with value 0.5 are considered
to be between BATNA and WATNA, while those
with value 0.9 are considered to be over BATNA.
In this paper, we compare the bound of BATNA/
WATNA and the suggestion as the pre-work and
A Three-Valued Semantics for Negotiated Situation of Multi-Agent System Based on BATNA and WATNA
339

then give the 3-valued valuation. Since G
¨
odel
logic can have finite or infinite values, it is able
to use a many-valued valuation (from 0 to 1) in
the suggestion model.
• In our suggestion model M = (S,V ), we do not
use the accessibility relation as Kripke model be-
cause R doesn’t work since we consider only one
suggestion can be selected and each suggestion
can be compared with each other. If we can se-
lect more than two suggestions and combine them
as a solution, we are able to use the relations to
express whether two suggestions can be selected
together or not. For example, we can use s
1
∪ s
2
shows the combine suggestion that includes s
1
and
s
2
, and we can define the satisfied relation as:
– M, s
1
∪ s
2
|= ⊥ iff s
1
Rs
2
– M, s
1
∪s
2
|= ϕ iff (M, s
1
|= ϕ or M, s
2
|= ϕ ) and
not s
1
Rs
2
.
• In this paper, we employed our 3-valued seman-
tics to express the negotiated situations in the
ODR system. Actually, using this semantics we
can show other situations, e.g., the strategy in
game theory. If an agent benefits much from a
strategy, then the agent would be glad to execute
it; If an agent loses much from a strategy, then the
agent would not execute it; and if an agent benefits
or loses little from a strategy, the agent may hes-
itate whether to execute it or not. We can see the
consideration is quite similar with our semantics
based on BATNA and WATNA. In this case, since
not all strategies can be noticed by every agent,
we may need to add different relations for each
agent as epistemic logic.
ACKNOWLEDGEMENTS
We would like to thank Takahiro Sawasaki for the
helpful comments. We are also grateful to Wachara
Fungwacharakorn and Kanae Tsushima for the useful
discussions. Finally, but not the least, we would also
like to thank the referees for their careful reading and
helpful comments. This research is supported by AIP
challenge.
REFERENCES
˚
Agotnes, T., van der Hoek, W., and Wooldridge, M. (2011).
On the logic of preference and judgment aggregation.
Autonomous Agents and Multi-Agent Systems, 22:4–
30.
Andrade, F., Novais, P., Carneiro, D., Zeleznikow, J., and
Neves, J. (2010). Using BATNAs and WATNAs in
online dispute resolution. In New Frontiers in Artifi-
cial Intelligence: JSAI-isAI 2009 Workshops, LENLS,
JURISIN, KCSD, LLLL, Tokyo, Japan, November 19-
20, 2009, Revised Selected Papers 1, pages 5–18.
Springer.
Baaz, M. (1996). Infinite-valued G
¨
odel logics with 0-1-
projections and relativizations. In G
¨
odel’96: Logi-
cal foundations of mathematics, computer science and
physics—Kurt G
¨
odel’s legacy, Brno, Czech Republic,
August 1996, proceedings, volume 6, pages 23–34.
Association for Symbolic Logic.
B
´
ılkov
´
a, M., Frittella, S., and Kozhemiachenko, D. (2022).
Paraconsistent G
¨
odel modal logic. In International
Joint Conference on Automated Reasoning, pages
429–448. Springer.
Caicedo, X. and Rodr
´
ıguez, R. O. (2015). Bi-modal G
¨
odel
logic over [0, 1]-valued kripke frames. Journal of
Logic and Computation, 25(1):37–55.
Dunne, P. E. (2005). Extremal behaviour in multiagent con-
tract negotiation. Journal of Artificial Intelligence Re-
search, 23:41–78.
Dunne, P. E., Wooldridge, M., and Laurence, M. (2005).
The complexity of contract negotiation. Artificial In-
telligence, 164(1-2):23–46.
Endriss, U. and Pacuit, E. (2006). Modal logics of negotia-
tion and preference. In European Workshop on Logics
in Artificial Intelligence, pages 138–150. Springer.
Follett, M. P. (2011). Constructive conflict. Sociology of
Organizations: Structures and Relationships, 417.
Kraus, S. (1997). Negotiation and cooperation in multi-
agent environments. Artificial intelligence, 94(1-
2):79–97.
Lodder, A. R. and Zelznikow, J. (2005). Developing an on-
line dispute resolution environment: Dialogue tools
and negotiation support systems in a three-step model.
Harv. Negot. L. Rev., 10:287.
Notini, J. (2005). Effective alternatives analysis in
mediation:“BATNA/WATNA” analysis demystified.
URL: https://www. mediate. com/articles/notini1.
cfm.[01/2022].
Preining, N. (2010). G
¨
odel logics–a survey. In International
Conference on Logic for Programming Artificial Intel-
ligence and Reasoning, pages 30–51. Springer.
Ragone, A., Di Noia, T., Di Sciascio, E., and Donini, F. M.
(2006). A logic-based framework to compute pareto
agreements in one-shot bilateral negotiation. FRON-
TIERS IN ARTIFICIAL INTELLIGENCE AND AP-
PLICATIONS, 141:230.
Robles, G. (2014). A simple Henkin-style completeness
proof for G
¨
odel 3-valued logic G3. Logic and Logical
Philosophy, 23(4):371–390.
Rodriguez, R. O. and Vidal, A. (2021). Axiomatization of
crisp G
¨
odel modal logic. Studia Logica, 109(2):367–
395.
Yang, C., Xu, T., Yang, R., and Li, Y. (2018). Multi-
agent single-objective negotiation mechanism of per-
sonalized product supply chain based on personal-
ized index. Advances in Mechanical Engineering,
10(10):1687814018795785.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
340
