
ShapeAug: Occlusion Augmentation for Event Camera Data
Katharina Bendig
1
, Ren
´
e Schuster
1,2
and Didier Stricker
1,2
1
RPTU, University of Kaiserslautern-Landau, Germany
2
DFKI, German Research Center for Artificial Intelligence, Germany
fi
Keywords:
Event Camera Data, Augmentation, Classification, Object Detection.
Abstract:
Recently, Dynamic Vision Sensors (DVSs) sparked a lot of interest due to their inherent advantages over con-
ventional RGB cameras. These advantages include a low latency, a high dynamic range and a low energy
consumption. Nevertheless, the processing of DVS data using Deep Learning (DL) methods remains a chal-
lenge, particularly since the availability of event training data is still limited. This leads to a need for event
data augmentation techniques in order to improve accuracy as well as to avoid over-fitting on the training data.
Another challenge especially in real world automotive applications is occlusion, meaning one object is hin-
dering the view onto the object behind it. In this paper, we present a novel event data augmentation approach,
which addresses this problem by introducing synthetic events for randomly moving objects in a scene. We
test our method on multiple DVS classification datasets, resulting in an relative improvement of up to 6.5 %
in top1-accuracy. Moreover, we apply our augmentation technique on the real world Gen1 Automotive Event
Dataset for object detection, where we especially improve the detection of pedestrians by up to 5 %.
1 INTRODUCTION
Dynamic Vision Sensors (DVSs), also known as event
cameras, are vision sensors that register changes in in-
tensity in an asynchronous manner. This allows them
to record information with a much lower latency (in
the range of milliseconds) compared to conventional
RGB cameras. In addition, they have a very wide dy-
namic range (in the range of 140 dB) and can there-
fore even detect motion at night and in poor lighting
conditions. Furthermore, DVS cameras impress with
their low energy consumption and they offer the pos-
sibility to filter out unimportant information (for ex-
ample a stagnant background) in many applications.
However, since this is a fairly recent technol-
ogy, the mass of available data for deep learning ap-
proaches is very limited. Compared to RGB datasets
like ImageNet (Deng et al., 2009) with 14 million im-
ages, event datasets like N-CARS (Sironi et al., 2018)
have only a few thousand labels. This makes data
augmentation very important in order to avoid overfit-
ting and to increase the robustness of the neural net-
work. Even with larger datasets like the Gen1 Auto-
motive Event Dataset (De Tournemire et al., 2020), it
has been shown that data augmentation significantly
increases the performance of Deep Learning (DL)
methods, (Gehrig and Scaramuzza, 2023).
Another challenge, particularly in the context of
autonomous approaches, is the occurrence of occlu-
sion, meaning that some objects are partially covered
by other objects. In order to ensure save driving, DL
approaches have to be able to detect these occluded
objects nevertheless. Regarding occlusion, current
event augmentation methods only consider missing
events either over time or in an area like it is done
for RGB images. However, these approaches only
model the behavior of an object moving in sync with
the camera, which deviates from real-world scenar-
ios. Additionally, automotive scenes are inherently
dynamic and also event streams posses a temporal
component. Consequently, the majority of objects
within the scene are typically in motion relative to
the camera, which can not be depicted by the simple
dropping of events at a fixed location.
Our objective is it to develop a more realistic aug-
mentation technique, that accounts for the additional
events generated by moving foreground objects. For
this reason, we introduce ShapeAug, an occlusion
augmentation approach, which simulates the events
as well as the occlusions caused by objects moving
in front of the camera. Our method utilizes a ran-
dom number of objects and also a randomly generated
linear movement in the foreground. We evaluate our
augmentation technique on the most common event
352
Bendig, K., Schuster, R. and Stricker, D.
ShapeAug: Occlusion Augmentation for Event Camera Data.
DOI: 10.5220/0012393500003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 352-359
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

datasets for classification and further demonstrate its
applicability in a real-world automotive task using
the Gen1 Automotive Event Dataset (De Tournemire
et al., 2020). Since Spiking Neural Networks (SNNs)
(Gerstner and Kistler, 2002) share the asynchronous
nature as well as the temporal component of event
data, they are the natural choice for processing events
and thus we choose to use SNNs for all our experi-
ments.
Our contribution can be summarized trough the
following points: We introduce ShapeAug, a novel
occlusion augmentation method for event data, and
assess its effectiveness for classification and object
detection tasks. Furthermore, We evaluate the robust-
ness of ShapeAug in comparison to other event aug-
mentation techniques on challenging variants of the
DVS-Gesture (Amir et al., 2017) dataset.
2 RELATED WORK
2.1 Occlusion-Aware RGB Image
Augmentation
Regarding RGB image augmentation, there are two
main methods for statistical input-level occlusion:
Hide-and-Seek (Singh and Lee, 2017) and Cutout
(DeVries and Taylor, 2017). Hide-and-Seek divides
the image into G × G patches and removes (mean-
ing zeros out) each patch with a certain probability.
Cutout on the other hand chooses N squares with a
fixed side length and randomly chooses their center
point in order to drop the underlying pixel values. The
work of (Fong and Vedaldi, 2019) builds upon these
methods while including a gradient-based saliency
method as well as Batch Augmentation (Hoffer et al.,
2019). These augmentations, however, are not able to
mimic occlusion in real world event data, since event
data has a temporal component meaning occluding
objects would move and produce events themselves.
2.2 Event Data Augmentation
Many data augmentation techniques for event data are
adaptations of augmentation methods for RGB im-
ages. The work of (Li et al., 2022b) applies known ge-
ometric augmentations, including horizontal flipping,
rolling, rotation, shear, Cutout (DeVries and Taylor,
2017) as well as CutMix (Yun et al., 2019). Geomet-
ric augmentations are a widely established technique,
which is why we will use it in combination with our
own augmentation method.
CutMix is a method to combine two samples with
labels using linear interpolation. The EventMix (Shen
et al., 2023) augmentation builds upon the idea of
CutMix and applies it on event input data. However,
this method is not able to realistically model occlu-
sion, since it does not consider that the body of a fore-
ground object may completely cover the background
object.
Inspired by Dropout (Srivastava et al., 2014),
the authors of (Gu et al., 2021) propose EventDrop,
which drops events randomly, by time and by area.
However, this method is not able to simulate occlu-
sion in real-world dynamic scenes, since only ob-
jects moving in sync with the camera would not gen-
erate additional events themselves. Therefore, our
method simulates not only the occlusion caused by
foreground objects but also the resulting events and
their own movement.
3 METHOD
3.1 Event Data Handling
An event camera outputs an event of the form e
i
=
(x
i
, y
i
,t
i
, p
i
), when the pixel at position (x
i
, y
i
) and at
time t
i
registers a logarithmic intensity change with
a positive or negative polarity p
i
∈ {0, 1}. Due to
asynchronous nature of the camera, its output is very
sparse and thus difficult to handle by neural networks.
Therefore, we create event histograms E in the shape
(T, 2, H,W ) with (H,W ) as the height and width of
the event sensor, where one event sample is split into
T time steps. We keep the polarities separated and
feed the time steps consecutively into the network. A
set of events E is thus processed in the following way:
E (τ, p, x, y) =
∑
e
i
∈E
δ(τ − τ
i
)δ(p − p
i
)δ(x − x
i
)δ(y − y
i
), (1)
τ
i
=
t
i
−t
a
t
b
−t
a
· T
, (2)
with δ(·) as the Kronecker delta function.
3.2 Shape Augmentation
Our occlusion-aware event augmentation is based on
random objects moving on linear paths in the fore-
ground. Since event streams have a temporal com-
ponent, it is necessary to treat them similar to videos
instead of image data. Thus it is important to avoid
unnecessary noise corruptions of the temporal rela-
tions between time steps or frames. That is why
we keep the augmentation consistent between time
steps in an event stream, like the authors of (Isobe
ShapeAug: Occlusion Augmentation for Event Camera Data
353

t
t +1
v
o
[
cosγ
o
sinγ
o
]
(x
o
,y
o
)
h
o
w
o
(a) Shape movement.
t +1
t
occlusion
area
positive events
negative events
(b) Positive and nega-
tive event computation.
Figure 1: Visualization of the shape parameters (position,
size and direction) that are randomly chosen for each sim-
ulated object (a). The objects move between timesteps and
are used to simulate the events that their movement would
cause (b).
et al., 2020) keep their augmentation consistent over
all frames in a video sequence. To do so, we generate
N ∈ [1, 5] random objects (circle, rectangle, ellipse),
where each object o gets assigned a random starting
position (x
o
, y
o
), a random size h
o
, w
o
∈ [3px, s
max
] as
well as a speed v
o
and an angle γ
o
. The shape param-
eters are illustrated in Figure 1a. We visualize these
objects at their respective position and create frames
for each timestep of the input event histogram. Be-
tween frames, the objects move linearly in the direc-
tion of a vector that is based on their assigned angle
and speed:
x
t+1
o
y
t+1
o
=
x
t
o
y
t
o
+ v
o
cosγ
o
sinγ
o
(3)
with t as the index of the frame. Whenever an object
moves outside of the frame, a new object is created to
maintain a consistent object count within the frame.
In order to keep the needed computational over-
head of the augmentation low, we choose a straight
forward simulation technique for the events caused by
the moving objects. Since real DVSs register changes
in the intensity, we simply use the difference between
consecutive frames to find areas of events as illus-
trated in Figure 1b. In these frames the background
is colored black and the shapes are assigned the color
gray. We further clip the frame difference to the mean
of the non-zero event sample values in order to re-
semble the input more closely. If the difference at an
image position is positive, it corresponds to a posi-
tive polarity event. Conversely, a negative difference
indicates an event with negative polarity. However,
since DVSs exhibit a certain level of noise, we remove
events with a probability of p = 0.2.
We then include the generated events in the fore-
ground of the original sample. However, since our
goal is the modeling of occlusion, we remove the
events in the sample that would be occluded by our
simulated objects. This is because events are only
triggered at the edge of moving shapes, which are ho-
mogeneously colored, not inside of them, where no
intensity changes occur. The whole pipeline of our
ShapeAug method is visualized in Figure 2.
4 EXPERIMENTS AND RESULTS
4.1 Datasets
We validate our approach for classification on four
DVS datasets, including two simulated image-based
datasets and two recordings of real movements with
a DVS. DVS-CIFAR10 (Li et al., 2017) is a con-
verted DVS version of the Cifar10 (Krizhevsky, 2012)
dataset. It includes 10,000 event streams, which were
recorded by smoothly moving the respective image in
front of a DVS with a resolution of 128px × 128px.
N-Caltech101 (Orchard et al., 2015) is likewise a con-
verted dataset based on Caltech101 (Fei-Fei et al.,
2004) containing 8709 images with varying sizes.
N-CARS (Sironi et al., 2018) is a real world DVS
dataset for vehicle classification. It contains 15422
training and 8607 test samples with a resolution of
120px × 100px. DVS-Gesture (Amir et al., 2017) is a
real world event dataset for gesture recognition. The
dataset includes 11 hand gestures from 29 subjects re-
sulting in 1342 samples with a size of 128px × 128px.
For the datasets, which do not include a pre-defined
train-validation split definition, we used the same split
as (Shen et al., 2023). We further resize all the event
streams to a resolution of 80px × 80px using bi-linear
interpolation, before applying any augmentation and
divide them into 10 timesteps.
For the object detection task we choose the Gen1
Automotive Event Dataset (De Tournemire et al.,
2020), which is recorded by a DVS with a resolution
of 304px × 240px during diverse driving scenarios. It
includes 255k labels with bounding boxes for pedes-
trians and cars. Like previous work (Li et al., 2022a),
(Gehrig and Scaramuzza, 2023), (Perot et al., 2020),
we remove bounding boxes with a diagonal less than
30px or a width or height less than 10px. We create
discretized samples with a window size of 125ms and
further divide them into 5 timesteps.
4.2 Implementation
We choose SNNs for conducting all our experiments,
since their asynchronous and temporal nature fits well
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
354
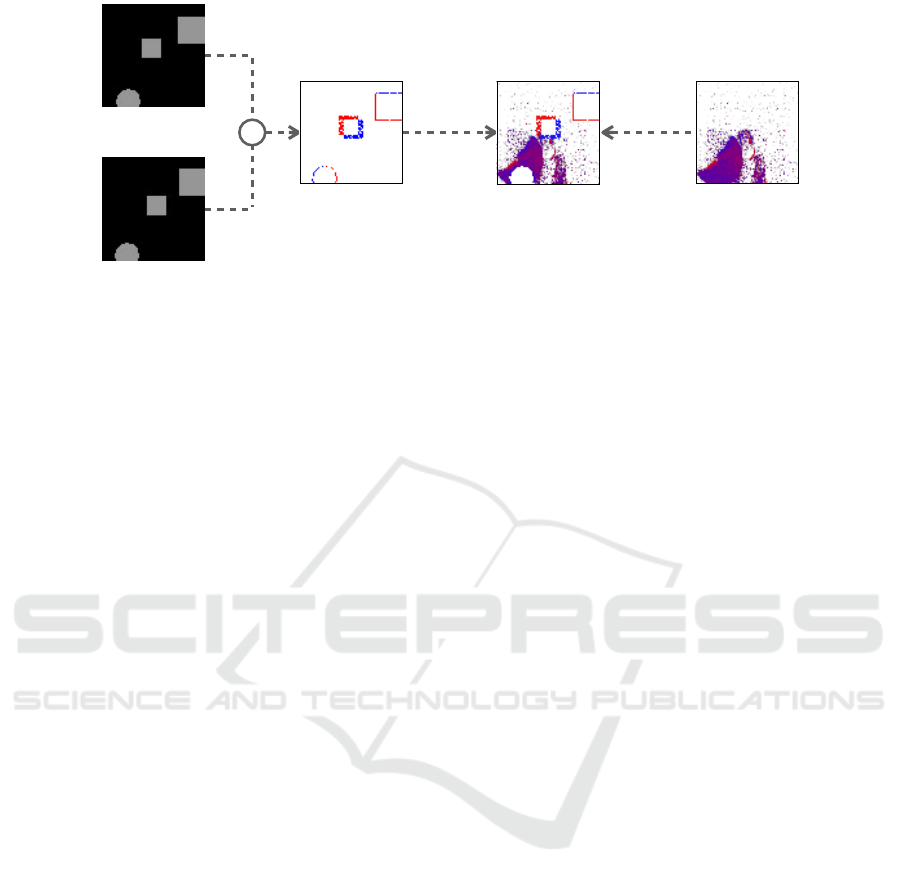
t +1
t
t +1 t +1 t +1
Grayscale
Shape Frames
Frame Difference +
Noise
Augmented
Frame
Original
Frame
-
Figure 2: ShapeAug pipeline example for DVS-Gesture (Amir et al., 2017).
to the processing of event data. Furthermore, SNNs
are inherently more energy efficient than compara-
ble Artifical Neural Networks (ANNs), making them
particularly useful for real world automotive applica-
tions.
For our classification experiments, we adopt the
training implementation of (Shen et al., 2023) and
therefore use a preactivated ResNet34 (He et al.,
2016) in combination with PLIF neurons (Fang et al.,
2021). As an optimizer we use AdamW (Loshchilov
and Hutter, 2017) with a learning rate of 0.000156
and a weight decay of 1 × 10
−4
. We further apply a
cosine decay to the learning rate for 200 epochs. Be-
cause it is already an established practice, we apply
geometrical augmentation on all our experiments in-
cluding the runs for our baseline. Similar to (Shen
et al., 2023), we therefore apply random cropping to
size 80px × 80px after padding with 7px, as well as
random horizontal flipping and random rotation by up
to 15
◦
.
Regarding our object detection experiments, we
follow the example of (Cordone et al., 2022) and
choose a Spiking DenseNet (Huang et al., 2017) with
SSD (Liu et al., 2016) heads as our network. We
also use an AdamW optimizer (Loshchilov and Hut-
ter, 2017) with a learning rate of 5 × 10
−4
and a co-
sine decay for 100 epochs. Moreover, we utilize a
weight decay of 1 × 10
−4
as well as a batch size of
64. As in (Cordone et al., 2022), we apply a smooth
L1 loss for the box regression and the Focal Loss (Lin
et al., 2020) for the classification task. Following the
example of (Gehrig and Scaramuzza, 2023), we uti-
lize the following geometrical augmentations for all
experiments: Random zoom-in and -out as well as
random horizontal flipping. Since rotations distort
bounding boxes, we choose to not apply this augmen-
tation method for the object detection task. As a met-
ric for our results, we use the mean Average Precision
(mAP) over 10 IoU thresholds [.5:.05:.95].
4.3 Event Data Classification
Table 1 shows the results of our augmentation tech-
nique on various event classification datasets using
different maximum shape sizes s
max
. Our method is
able to outperform the baseline for all four datasets.
Especially the data, that was recorded based on RGB
images, benefited greatly from the shape augmen-
tation. This may be caused by the similarity of
movements, between the recording and the simulated
shapes. More dynamic scenes may require more com-
plex movements of the shapes, which however can
lead to an increased simulation overhead. Addition-
ally, it is challenging to further improve the results
on the N-CARS dataset, since the baseline is already
able to nearly perfectly classify the validation set. The
results also show that, in the majority of cases, even
using s
max
= 50 improves the results. However, the
best choice of shape sizes depends on the actual ob-
jects depicted in the dataset.
4.4 Comparison with Existing
Literature on Robustness
In order to evaluate and compare the robustness of
our event augmentation, we create three challeng-
ing validation datasets based on DVS Gesture (Amir
et al., 2017) using the following augmentations on
each sample: Geometric (horizontal flipping, rotation,
cropping), EventDrop (Gu et al., 2021) and ShapeAug
with s
max
= 30. Notably, we decided to not include
the EventMix (Shen et al., 2023) for validation aug-
ShapeAug: Occlusion Augmentation for Event Camera Data
355

Table 1: Comparison of classification results using different max shape sizes s
max
. We report the top-1 accuracy as well as
the top-5 accuracy in brackets, except for datasets with less than 5 classes. The best and second best results are shown in bold
and underlined respectively.
Method Max Shapesize [px] DVS-CIFAR10 N-Caltech101 N-CARS DVS-Gesture
Geo - 73.8 (95.5) 62.2 (81.5) 97.1 89.8 (99.6)
Geo + ShapeAug 10 74.3 (95.1) 68.0 (83.9) 97.3 90.9 (99.6)
Geo + ShapeAug 30 73.9 (94.7) 68.7 (86.9) 96.9 91.7 (100)
Geo + ShapeAug 50 75.7 (96.7) 68.2 (85.2) 96.9 90.5 (99.2)
Table 2: Comparison of the robustness of current event augmentation approaches on various augmented versions of DVS
Gesture (Amir et al., 2017). The best and second best results are shown in bold and underlined respectively.
P
P
P
P
P
P
P
Train
Valid
- Geo Drop Shape
Geo 89.8 87.5 58.0 63.6
Geo + Drop 89.8 87.9 86.0 73.9
Geo + Mix 93.1 92.4 82.6 76.9
Geo + Shape 91.7 90.5 84.1 87.9
Geo + Drop + Shape 91.7 90.2 88.6 87.5
Geo + Mix + Shape 94.7 91.7 87.5 91.3
Geo + Mix + Drop 92.8 89.8 89.8 75.4
Geo + Mix + Drop + Shape 95.8 94.7 92.8 89.8
mentation due to its generation of multi-label sam-
ples, which would create an unfair comparison, as the
other methods were not trained for that case. The re-
sults of our experiments can be found in Table 2.
Since augmentation techniques have the unique
property that they can be combined, we decided to
not only compare the existing approaches but also in-
vestigate their combination during training. Generally
we applied every augmentation with a probability of
p = 0.5, resulting in some training examples under-
going multiple augmentations. Geometrical augmen-
tation was also here universally applied to all training
samples.
Comparison to State-of-the-Art. The results on
the standard validation dataset show, that ShapeAug
is able to improve the networks performance much
more than EventDrop, which approximately achieves
the same accuracy like the baseline. Generally, Event-
Mix has the greatest positive impact on the outcome.
Nevertheless, it has to be noted that the mixing of
samples, allows the network to see every sample mul-
tiple times during an epoch which is not the case for
other augmentation techniques.
Robustness. Also on most of the augmented valida-
tion data, ShapeAug is able to outperform EventDrop,
proving its increased robustness. Only on the drop-
augmented data, EventDrop naturally performs better
in comparison to ShapeAug and EventMix. Further-
more, no method that was trained without ShapeAug
is able to perform well on the shape-augmented data
(> 10% lower accuracy than ShapeAug), showing
their lack of robustness against moving foreground
objects in event data. Conversely, methods trained
with ShapeAug or EventMix are still capable of pre-
dicting drop-augmented data (only 2 − 4% lower ac-
curacy compared to EventDrop), which proves their
natural robustness against this augmentation.
Combination of Methods. Our ShapeAug method
shows great potential for being combined with other
augmentation techniques, since it is always able to
improve the performance on the standard as well as
all the challenging validation data. The usage of
EventDrop on the other hand even leads to a de-
creased accuracy when combined with multiple ap-
proaches on most of the validation data. The best per-
formance, outperforming the baseline by about 6%,
can be achieved when we train on all event augmen-
tation techniques combined during training. Overall,
however, we find that our ShapeAug augmentation
can nearly compensate for all the benefits of utilizing
drop-augmentation.
4.5 Automotive Object Detection
We further test our ShapeAug technique for object
detection on the Gen1 Automotive Event Dataset
(De Tournemire et al., 2020). The results can be seen
in Table 3 and show that ShapeAug is able to increase
the performance of the detection. It especially has
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
356
Table 3: Object detection test results on the Gen1 Automotive Event Dataset (De Tournemire et al., 2020).
Method Max Shape size [px] mAP AP
50
AP
75
AP
car
AP
ped
Geo - 29.26 55.20 26.99 41.13 17.37
Geo + ShapeAug 50 29.60 56.99 26.70 40.91 18.30
Geo + ShapeAug 100 27.43 52.16 25.59 40.09 14.78
Geo + ShapeAug 150 26.33 50.59 24.36 39.43 13.24
Table 4: Evaluation of robustness over multiple augmented test sets of the Gen1 Automotive Event Dataset (De Tournemire
et al., 2020).
Method Max Shape size [px] - Geo Drop Shape
Geo - 29.26 29.15 23.48 25.68
Geo + ShapeAug 50 29.60 28.76 24.21 27.94
a positive impact on the bounding box prediction of
pedestrians, where it increases the AP by over 5%.
Pedestrians are in general much more challenging to
detect, since they usually appear smaller than cars in
the images and their movements as well as their ap-
pearances are much more complex and have a high
variance. Furthermore, they are more prone to be oc-
cluded by other traffic participants, which may be the
reason ShapeAug is especially benefiting their detec-
tion. However, the results also indicate that the size of
the shapes has a significant impact on the predictions.
Compared to the classification dataset, the objects in
the Gen1 Automotive Event Dataset can appear very
small and too much occlusion may hinder the training
signal to pass trough the network effectively. Further-
more, the movements of objects in real world automo-
tive scenes are very complex and do not just follow a
linear pattern. Therefore, the occlusion augmentation
can be further improved by increasing the complexity
of movements and shapes, which however will also
increase the simulation overhead.
Robustness Analysis. Also for the object detection
task, we examined the robustness of ShapeAug on
different augmented test sets of the Gen1 Automotive
Event Dataset (De Tournemire et al., 2020). Regard-
ing the geometrical augmentation, we applied zoom
(either zoom-in or zoom-out) on all images as well
as horizontal flipping with a probability of p = 0.5.
Since our experiments were done on pre-processed
event data in order to decrease the computations dur-
ing training, we opted for Random Erasing (Zhong
et al., 2020), which randomly erases rectangles of the
input image, as our drop augmentation. Table 4 con-
tains the results of our robustness evaluation. If the
appropriate size of shapes is chosen, ShapeAug in-
deed improves the results for the prediction on shape-
augmented as well as on drop-augmented data. This
means for tasks where a high degree of occlusion dur-
ing inference is expected, ShapeAug can be a valuable
technique to increase prediction performance. How-
ever, it is necessary to evaluate the right values for
hyperparameters, including the shape size, the num-
ber of objects as well as the movement pattern of the
shapes.
5 CONCLUSION
Augmentation for event data during the training of
neural networks is crucial in order to ensure robust-
ness as well as to avoid overfitting and to improve
accuracy. In this work, we introduced ShapeAug,
an augmentation technique simulating moving fore-
ground objects in event data. Our method includes the
simulation of a random amount of objects, moving on
randomly chosen linear paths, and using the resulting
events from their movement. Since the objects are
in the foreground, ShapeAug allows the modeling of
realistic occlusions, since in real world scenarios oc-
cluding objects would cause the generation of events.
We show the effectiveness of our approach on the
most common event classification datasets, where it
is able to improve the accuracy significantly. Fur-
thermore, ShapeAug proves to increase the robustness
of predictions on a set of challenging validation data
and is able to outperform other event drop augmen-
tations. Our technique can be also easily combined
with other augmentation methods, leading to an even
higher boost of the prediction performance. Addition-
ally, ShapeAug improved the object detection on a
real world automotive dataset and further enhanced
the robustness against various augmentations on the
test dataset.
Currently, our shape augmentation method only
simulates very simple homogenously colored shapes
and their movements. It remains for future work to ex-
plore the simulation of complex movements and more
sophisticated textures and object shapes.
ShapeAug: Occlusion Augmentation for Event Camera Data
357

ACKNOWLEDGEMENTS
This work was funded by the Carl Zeiss Stiftung,
Germany under the Sustainable Embedded AI project
(P2021-02-009) and partially funded by the Federal
Ministry of Education and Research Germany under
the project DECODE (01IW21001).
REFERENCES
Amir, A., Taba, B., Berg, D., Melano, T., McKinstry, J.,
Di Nolfo, C., Nayak, T., Andreopoulos, A., Garreau,
G., Mendoza, M., Kusnitz, J., Debole, M., Esser, S.,
Delbruck, T., Flickner, M., and Modha, D. (2017). A
low power, fully event-based gesture recognition sys-
tem. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Cordone, L., Miramond, B., and Thierion, P. (2022). Object
detection with spiking neural networks on automotive
event data. In International Joint Conference on Neu-
ral Networks (IJCNN).
De Tournemire, P., Nitti, D., Perot, E., Migliore, D.,
and Sironi, A. (2020). A large scale event-based
detection dataset for automotive. arXiv preprint
arXiv:2001.08499.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In Conference on Computer Vision
and Pattern Recognition (CVPR).
DeVries, T. and Taylor, G. W. (2017). Improved regular-
ization of convolutional neural networks with cutout.
arXiv preprint arXiv:1708.04552.
Fang, W., Yu, Z., Chen, Y., Masquelier, T., Huang, T., and
Tian, Y. (2021). Incorporating learnable membrane
time constant to enhance learning of spiking neural
networks. In International Conference on Computer
Vision (ICCV).
Fei-Fei, L., Fergus, R., and Perona, P. (2004). Learning gen-
erative visual models from few training examples: An
incremental bayesian approach tested on 101 object
categories. In Conference on Computer Vision and
Pattern Recognition Workshop (CVPRW).
Fong, R. and Vedaldi, A. (2019). Occlusions for effective
data augmentation in image classification. In Interna-
tional Conference on Computer Vision Workshop (IC-
CVW).
Gehrig, M. and Scaramuzza, D. (2023). Recurrent vision
transformers for object detection with event cameras.
In Conference on Computer Vision and Pattern Recog-
nition (CVPR).
Gerstner, W. and Kistler, W. M. (2002). Spiking Neu-
ron Models: Single Neurons, Populations, Plasticity.
Cambridge University Press.
Gu, F., Sng, W., Hu, X., and Yu, F. (2021). Eventdrop:
data augmentation for event-based learning. In Inter-
national Joint Conferences on Artificial Intelligence
(IIJCAI).
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Identity
mappings in deep residual networks. In European
Conference on Computer Vision (ECCV).
Hoffer, E., Ben-Nun, T., Hubara, I., Giladi, N., Hoefler, T.,
and Soudry, D. (2019). Augment your batch: better
training with larger batches. In arXiv.
Huang, G., Liu, Z., Maaten, L. V. D., and Weinberger, K. Q.
(2017). Densely connected convolutional networks. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Isobe, T., Han, J., Zhuz, F., Liy, Y., and Wang, S.
(2020). Intra-clip aggregation for video person re-
identification. In International Conference on Image
Processing (ICIP).
Krizhevsky, A. (2012). Learning multiple layers of features
from tiny images. University of Toronto.
Li, H., Liu, H., Ji, X., Li, G., and Shi, L. (2017). CIFAR10-
DVS: An event-stream dataset for object classifica-
tion. Frontiers in Neuroscience.
Li, J., Li, J., Zhu, L., Xiang, X., Huang, T., and Tian,
Y. (2022a). Asynchronous spatio-temporal memory
network for continuous event-based object detection.
Transactions on Image Processing.
Li, Y., Kim, Y., Park, H., Geller, T., and Panda, P. (2022b).
Neuromorphic data augmentation for training spiking
neural networks. In European Conference on Com-
puter Vision (ECCV).
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Dollar, P.
(2020). Focal loss for dense object detection. Trans-
actions on Pattern Analysis and Machine Intelligence
(PAMI).
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single shot
MultiBox detector. In European Conference on Com-
puter Vision (ECCV).
Loshchilov, I. and Hutter, F. (2017). Decoupled weight
decay regularization. In International Conference on
Learning Representations (ICLR).
Orchard, G., Jayawant, A., Cohen, G. K., and Thakor, N.
(2015). Converting static image datasets to spiking
neuromorphic datasets using saccades. Frontiers in
Neuroscience.
Perot, E., de Tournemire, P., Nitti, D., Masci, J., and
Sironi, A. (2020). Learning to detect objects with a 1
megapixel event camera. In Neural Information Pro-
cessing Systems (NeurIPS).
Shen, G., Zhao, D., and Zeng, Y. (2023). Eventmix: An
efficient data augmentation strategy for event-based
learning. Information Sciences.
Singh, K. K. and Lee, Y. J. (2017). Hide-and-seek: Forc-
ing a network to be meticulous for weakly-supervised
object and action localization. In International Con-
ference on Computer Vision (ICCV).
Sironi, A., Brambilla, M., Bourdis, N., Lagorce, X., and
Benosman, R. (2018). Hats: Histograms of averaged
time surfaces for robust event-based object classifica-
tion. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
358

to prevent neural networks from overfitting. Journal
of Machine Learning Research (JMLR).
Yun, S., Han, D., Chun, S., Oh, S. J., Yoo, Y., and Choe,
J. (2019). CutMix: Regularization strategy to train
strong classifiers with localizable features. In Interna-
tional Conference on Computer Vision (ICCV).
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y. (2020).
Random erasing data augmentation. In AAAI confer-
ence on artificial intelligence.
ShapeAug: Occlusion Augmentation for Event Camera Data
359
