
YOLOv7E: An Attention-Based Improved YOLOv7 for the
Detection of Unmanned Aerial Vehicles
Dapinder Kaur
1,2
, Neeraj Battish
1
, Arnav Bhavsar
3
and Shashi Poddar
1,2
1
CSIR – Central Scientific Instruments Organisation, Sector 30C, Chandigarh 160030, India
2
Academy of Scientific & Innovative Research (AcSIR), Ghaziabad 201002, India
3
IIT Mandi, Himachal Pradesh 175005, India
Keywords: Deep Learning, UAVs, YOLOv7, Attention Modeling, Air-to-Air Object Detection.
Abstract: The detection of Unmanned Aerial Vehicles (UAVs) is a special case for object detection, specifically in the
case of air-to-air scenarios with complex backgrounds. The proliferated use of UAVs in commercial, non-
commercial, and defense applications has raised concerns regarding their unauthorized usage and mishandling
in certain instances. Deep learning-based architectures developed recently to deal with this challenge could
detect UAVs very efficiently in different backgrounds. However, the problem of detecting UAVs in complex
background environments need further improvement and has been catered here by incorporating an attention
mechanism in the YOLOv7 architecture, which considers channel and spatial attention. The proposed model
is trained with the DeTFly dataset, and its performance has been evaluated in terms of detection rate, precision,
and mean average precision values. The experimental results present the effectiveness of the proposed
YOLOv7E architecture for detecting UAVs in aerial scenarios.
1 INTRODUCTION
Unmanned aerial vehicles (UAVs) have grown in
popularity in recent decades due to their vast
applications in agriculture, defense, surveillance,
healthcare, etc. With the tremendous growth in
commercial UAVs, there is also a parallel growth of
malicious UAVs, which can carry explosive payloads,
capture audio-visual data from a restricted private
area, and enter the non-flying zone. Several incidents
have been reported wherein malicious UAVs have
entered restricted and no-flying zones, creating panic
and security threats to the life and strategic
infrastructure. These no-fly zones need to have a
mechanism by which they can monitor an
unidentified flying object. As a result, the
development of anti-drone systems is gaining pace
worldwide, and the problem of real-time drone
detection is becoming more relevant (Seidaliyeva et
al., 2020).
Vision-based UAV detection is one of the
primary elements for any anti-drone system and
requires highly accurate drone detection in different
scenarios. The problem of UAV detection varies
depending on the perspective from which the images
are captured, from the ground or from another aerial
platform. The detection of UAVs from another aerial
platform is far more complex as compared to the
images captured from static cameras mounted on the
ground to capture UAVs flying in the air due to the
diverse views, angles, motion, and complex
backgrounds.
With the advent of deep learning techniques, the
traditional image processing-based techniques for
drone detection have been replaced with more
efficient architectures. Several deep learning
architectures have been designed, including the
region-based convolutional neural network (R-CNN),
faster R-CNN, YOLOv3, and YOLOv5. However,
these models do not handle key challenges such as
moving cameras and detecting distant drones, and
their performance is still not at par. Some of the other
frameworks use a combination of visible & acoustic
data (Jamil et al., 2020), visual & thermal data (Y.
Wang et al., 2019), and visible, thermal, & acoustic
data (Svanstrom et al., 2021) for the detection of
drones.
In the deep learning architectures, several
attention-based methods have gained importance and
are used for various applications, including object
detection (Li et al., 2022). Attention-based methods
focus on specific input sections by assigning weights
to the input elements. There are two different kinds of
attention mechanisms: channel attention and spatial
344
Kaur, D., Battish, N., Bhavsar, A. and Poddar, S.
YOLOv7E: An Attention-Based Improved YOLOv7 for the Detection of Unmanned Aerial Vehicles.
DOI: 10.5220/0012391500003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 344-351
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

attention. Channel attention concentrates on global
features, whereas spatial attention focuses on local
features (Y. Zhang et al., 2019). Further, spatial
attention identifies the key features from the feature
maps, and channel attention, on the other hand,
increases the feature maps for model learning.
Utilizing the inter-spatial relationship between
components, spatial attention creates a map that
focuses on the locations of essential parts, acting as a
supplement to the channel attention (Woo et al.,
2018). In this way, channel and spatial attention boost
the performance of several different deep learning
architectures (Khan et al., 2020).
In this paper, the main contribution is
incorporating an attention-based backbone into the
YOLOv7 architecture for air-to-air (A2A) UAV
detection and investigating its performance on
publicly available datasets. The contributions of this
work are as follows:
• YOLOv7E: an improved YOLOv7 for
micro-UAV detection in several complex
environments of the A2A object detection
scenario.
• Feature enhancement by adding an EPSA
attention module in the backbone of the
YOLOv7 network, which can extract and
enhance the multi-scale feature
representation and adaptively recalibrate the
channel-wise attention.
• Testing and analysis of the proposed
YOLOv7E for A2A UAV detection tasks to
compare with YOLOv7 with a variety of
metrics.
Intending to detect UAV from a UAV, this paper
further discusses the literature on the problem of UAV
detection followed by a methodology section, in
which firstly, the base model YOLOv7 is discussed to
understand the current architecture of the model, the
attention-based approach to improve this architecture
is deliberated in detail, followed by the proposed
YOLOv7E framework. The experimentation section
describes and ensures the proposed model's
effectiveness on the task of aerial object detection,
and finally, the paper is concluded.
2 RELATED WORK
The problem of UAV detection in the A2A scenario is
relatively less explored using computer vision
approaches, and has, therefore, a limited number of
research articles in this direction. The literature
review here focuses on vision-based UAV to UAV
detection using deep learning architectures alone. The
large-scale A2A micro-UAV dataset generated by
(Zheng et al., 2021), named the DetFly dataset, has
over 13000 images of micro-UAVs captured by
another UAV. For the UAV detection task, different
deep learning architecture has been trained where grid
RCNN achieved the overall highest average precision
(AP) and performed well in challenging situations
like intense/ weak lighting and motion blurring.
You Only Look Once (YOLO), a convolutional
neural network-based model, has been popular
because of its fast and precise performance in the
literature. (Dadboud et al., 2021) proposed a
YOLOv5-based air-to-air object detection and used
the DetFly and other UAV datasets for
experimentation. The YOLOv5 model was compared
with the Faster R-CNN and FPN models, which
achieved better detection results. Furthermore, the
improved version of YOLO, that is, YOLOR was
proposed by (Kizilay & Aydin, 2022), which utilized
the lower layers of information called attribute
information and improved the performance of UAV
detection in A2A scenarios with highest mAP.
(Leong et al., 2021), utilized the YOLOv3-tiny model
to detect UAVs and estimated their velocity using a
filtering framework. Furthermore, (Gonzalez et al.,
2021) used YOLOv3 tiny for short and long-range-
UAV detection in the A2A environment. Another
deep learning model that utilized the backbone of
YOLOv5, i.e., CSP-Darknet53 with video swin
model was proposed by (Sangam et al., 2022). It
utilized spatiotemporal swin transform and generated
attention-based features to improve the performance
of UAV detection in UAV-to-UAV detection
problems.
The above literature survey indicates that deep
learning-based architectures facilitate the problem of
UAV-to-UAV detection and contribute by offering
fast and robust performance. In comparison to two-
stage detectors, single-stage detectors, like YOLO-
based models, showcase their effectiveness in terms
of precision and accuracy. However, the performance
is inadequate when the scenario is unclear, including
dynamic and complex backgrounds. Furthermore, the
recent development in the YOLO-based models
claims their better performance for several object
detection tasks. In order to conduct a more detailed
analysis, this work utilizes YOLOv7 and proposes an
attention-based model named YOLOv7E to improve
the performance of UAV detection.
As discussed earlier, attention-based models
recalibrate the weights of features to improve
performance. Like, YOLOv7 is enhance further using
a convolutional block attention module that adds
multi-scaling for object detection (J. Chen et al.,
YOLOv7E: An Attention-Based Improved YOLOv7 for the Detection of Unmanned Aerial Vehicles
345

2022). This module integrates channel and spatial
attention but cannot establish a channel dependency
for long ranges. To deal with this, further a global
attention module was introduced in YOLOv7 (K. Liu
et al., 2023), where the channel attention module is a
3-dimensional module, which amplifies the inter-
dimensional dependencies using a multi-layer
perceptron. In this, the spatial attention module has
two convolution layers to extract the significant
regions from the image. However, it increases the
complexity of the model, so a simple attention
module could be the best fit for YOLOv7 due to its
own complex architecture. In this work, a lightweight
YOLOv7E architecture is proposed that incorporates
Efficient Pyramid Squeeze Attention (EPSA) module
in the YOLOv7 architecture to reduce the overall
complexity and improve the detection performance.
3 METHODOLOGY
The main focus of the proposed work is to improve
the performance of the UAV detection framework
using an attention-based mechanism in YOLOv7
architecture. YOLO-based single-stage detectors
consider the object detection problem as a regression
problem and do not include the region proposal stage,
making them faster than the two-stage detectors like
RCNN, fast RCNN, Faster RCNN, etc. YOLOv7 is
the recent addition to the YOLO models, and
literature claims its better performance than other
existing YOLO models and two-stage detectors (C.-
Y. Wang et al., 2022). This section deliberates on the
existing YOLOv7 architecture, the attention based
EPSA approach, and the proposed YOLOv7E
framework.
3.1 YOLOv7
YOLOv7 is a recent version of YOLO-based
architectures for object detection problems and
outperforms previous versions in terms of speed and
accuracy. This model includes an extended efficient
layer aggregation network (E-ELAN), model scaling,
RepConvN, and coarse to fine lead head guided label
assigner (C.-Y. Wang et al., 2022). Here, E-ELAN
focuses on improving the network's backbone by
continuously elevating its learning capabilities. It
introduces three different operations in the
architecture: (i) expansion, (ii) shuffling, and (iii)
merging to increase the cardinality of features without
changing its gradient propagation path. Group
convolutions are used in each computational block
with the same group and channel multiplier
parameters for expansion. Shuffling is performed on
the computed feature maps and is divided into
different groups using the same defined parameters.
These feature maps are then concatenated to generate
the same number of channels as the original. Finally,
the merging operation is carried out by adding all the
groups to their feature maps and enhancing the
feature maps as a result. The feature maps extracted
from these computational blocks are passed through
the SPPCSPC (Spatial Pyramid Pooling and Cross
Stage Partial Channel) module which increases the
model's receptive field.
Furthermore, a compound model scaling is
proposed in YOLOv7 due to its concatenation-based
architecture. As model scaling is used to adjust
different attributes of the model and to generate it on
different scales, it decreases or increases the
computational blocks in the case of concatenation-
based architecture. Hence, to deal with this issue, a
compound scaling first scales the depth factor and
computes changes in the output channels. Then, it
uses the same amount of change for width factor
scaling and maintains the properties of the model to
retain its optimal structure. Other than this, it was
identified that the identity connection of the RepConv
eradicates the residuals, so YOLOv7 replaces it with
RepConvN, which does not include any identity
connections and provides diverse gradients for
distinct feature maps.
These extracted features aggregate the
information only on three different scales using the
neck module in a PANet architecture (S. Liu et al.,
2018) and performed the final detections with the
detection head. In object detection networks based on
deep learning, some detection head utilizes deep
supervision, while others work without it. With deep
supervision, there are two types of heads: (i) the lead
head, responsible for final output, and (ii) the
auxiliary head, to assist training. Additionally, label
assigners are used to assign soft labels using
prediction results with ground truth labels. The issue
of assigning soft labels to the lead or auxiliary head
was unresolved until YOLOv7. In YOLOv7, a new
label assigner is proposed which guides both the lead
and auxiliary head based on the prediction of lead
head, called a lead head guided label assigner.
Besides, it is refined using coarse and fine labels for
optimizing the final predictions and improving the
overall ability of the model.
Though YOLOv7 is an advanced version that
proposes E-ELAN in the computational blocks to
enhance the feature maps, it is still struggling to
detect small objects, specifically in complex
backgrounds. In addition, its several applications for
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
346
different object detection tasks (Yang et al., 2022) and
its improvements based on attention mechanisms
(Zhao et al., 2023) provides space for further
improvement.
3.2 Attention-Based Approach
Attention-based methods are widely used in computer
vision applications, including object detection,
classification, segmentation, and localization.
Channel and spatial attention are the two methods that
can improve the performance of deep neural
networks. The most common method of channel
attention is the squeeze and excitation (SE) module
(Devassy & Antony, 2023), which assigns the weights
to generate informative outcomes. It first squeezes the
input using global average pooling (GAP) to encode
the global information and then uses excitation to
recalibrate the channel-wise relationship. It does not
provide any importance to the spatial information,
hence losing the feature information. In order to
further improve the model, channel and spatial
information were combined, and modules such as
bottleneck attention module (X. Chen et al., 2023)
and convolution block attention module (Jiang & Yin,
2023) were proposed. However, they fail to establish
multi-scale and long-range channel dependencies and
impose a burden on the models due to their heavy
computations. An Efficient Pyramid Squeeze
Attention (EPSA) module was proposed in (H. Zhang
et al., 2021) to provide a low-cost, high-performance
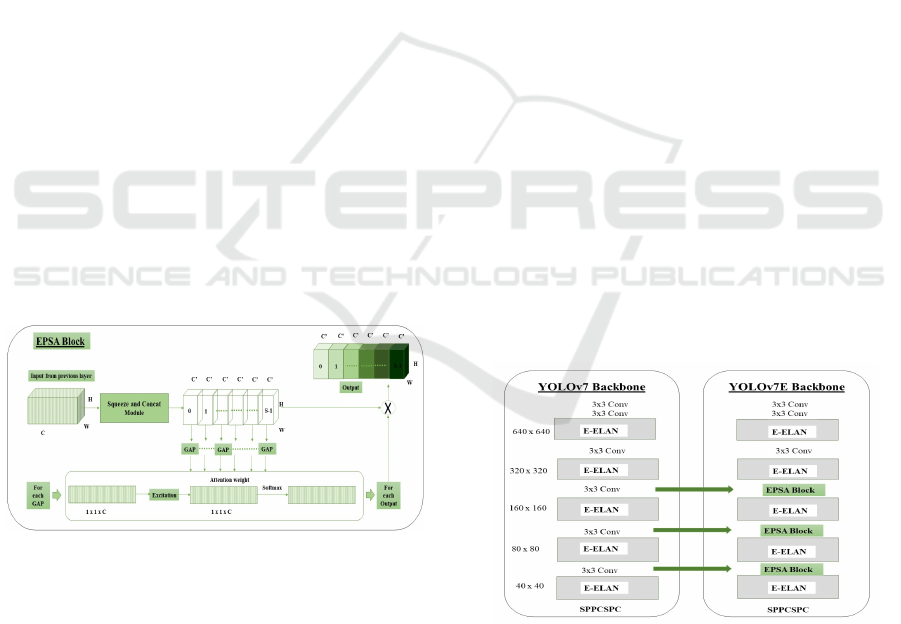
solution, as shown in Figure 1.
Figure 1: EPSA block.
This EPSA block consists of a squeeze and concat
module, which extracts spatial information and
obtains rich positional information by processing the
input parallelly in multiple scales. Further, the
channel attention of these multi-scale feature maps is
extracted by the SE module, where each channel is
passed through a GAP and excitation module. This
fuses the different scale context information and
produces pixel-level attention. Additionally, the
softmax function is used to obtain the location
information on the space and attention weights in the
channels. These recalibrated weights are multiplied
with the corresponding scales' feature maps to obtain
local and global context information.
3.3 Proposed YOLOv7E
This work aims to effectively detect A2A objects
(UAVs), even in a complex environment. Hence, it
needs to learn the channel and spatial features, and
their intrinsic relationships in the images. With this
objective, an enhanced version of YOLOv7, called
YOLOv7E, is proposed that uses an attention module
to extract both the local and global context
information by focussing on spatial and channel
attention. Here, an EPSA attention block is introduced
in the YOLOv7 backbone, which has a low-cost and
high-performance pyramid squeeze attention (PSA)
module that processes the input tensor at multiple
scales and integrates the information for input feature
maps. The spatial information from each channel
feature map is extracted on different scales, precisely
giving context features of all the neighboring scales.
Further, the channel-wise attention weights are
extracted for multi-scale feature maps, which help the
network model to analyze and extract the relevant
information. Additionally, to recalibrate the attention
weights, a SoftMax operation is employed. The EPSA
block in the proposed YOLOv7E backbone learns
richer multi-scale feature representation and
adaptively recalibrates the cross-dimension channel-
wise attention. As shown in Figure 2, the EPSA block
is added by replacing few convolutional layers of the
YOLOv7.
Figure 2: YOLOv7 and YOLOv7E backbone.
In YOLO-based models, feature extraction has a vital
role in improving the detection accuracy, and
therefore, by adding an EPSA block, multi-scale
coarse spatial information is extracted with a long-
range channel dependency. As shown in Figure 2,
three EPSA blocks are added by replacing the 3 x 3
YOLOv7E: An Attention-Based Improved YOLOv7 for the Detection of Unmanned Aerial Vehicles
347

convolution block of the YOLOv7 backbone. This
block processes the features of the E-ELAN module
and enhances their representation without destroying
the original feature map, providing more contextual
information. These blocks are placed in the middle
layers of the backbone to maintain both the low-level
and the high-level information, which are aggregated
in the neck module of the YOLO model.
The neck module of YOLOv7 uses a path
aggregation network (PANeT) (C.-Y. Wang et al.,
2022), a feature pyramid network (FPN) based
structure, and has an additional bottom-up path
aggregation. In YOLOv7E, the EPSA module
integrates the multi-scale spatial information and
cross-channel attention for each feature group and
obtains the local and global channel interaction
information, which is aggregated with the feature
maps using element-wise sum, same as the PANeT.
This multi-scale spatial information and the cross-
channel attention adds robustness to the YOLOv7E
backbone and improve its efficiency. The detection
head of the model remains the same, which detects
the object and localizes it on the image.
The YOLOv7 was not explicitly designed to
address complex situations; however, this proposed
YOLOv7E has the additional capabilities of EPSA to
extract the multi-scale enhanced representations that
add the ability in the proposed model to obtain the
information of the objects even in complex
environments and improve its performance.
4 EXPERIMENTATION AND
ANALYSIS
The performance of the proposed YOLOv7E
architecture is benchmarked with the YOLOv7 based
on its detection performance, precision, and mAP.
The experiments are carried out here on a window-
based system with NVIDIA RTX A6000 GPU and
128 GB RAM capabilities. Moreover, python is used
for implementation with different libraries. The other
details related to parameters and experimentation are
deliberated below.
4.1 Dataset
A2A object detection remains a relatively less
explored research field and hence, the dataset
availability is also limited. Among the available
datasets, the DetFly dataset (Zheng et al., 2021) is the
most recent available A2A UAV detection dataset,
which contains 13271 images of micro-UAVs in
different lighting conditions, background sceneries,
relative distances, and viewing angles. The images
are of high resolution and have a size 3840 x 2160
pixels. Experts annotate all the images, and their
annotations are also available for research. Further,
the dataset is evaluated for UAV detection using
different object detection methods where Grid RCNN
achieved a maximum average precision. The sample
dataset images have different backgrounds, lighting
conditions, view angles, etc. In the dataset, images are
available in equal proportions for each type of view
and background. Furthermore, the images of UAVs in
direct sunlight environment from MIDGARD dataset
(Walter et al., 2020) were also utilized for the analysis
of YOLOv7E performance.
4.2 Training Parameters
The proposed model and base model are trained with
70% data, and the rest, 30% data, is used for testing
purposes. The dataset of different views and scenarios
is divided into equal proportions for both training and
test data. The other training parameters, including its
input size, optimizer, epochs, etc., are kept identical
for both models and are given in the following table:
Table 1: Training Parameters.
Parameter Values
Input Size 640
Batch Size 16
Optimizer SGD
Learning rate 1e-2
Momentum 0.93
Weight Decay 5e-4
Epoch
500, 1000
4.3 Detection Results
The visual results of the detection using YOLOv7,
and its improved version are presented in Figure 3. It
shows that the base model missed some target UAVs
in highly complex scenarios, whereas the proposed
YOLOv7E detects them accurately. To quantify these
detection results, the detection rate is also computed,
and it is found that the proposed YOLOv7E has a
relatively higher detection rate of 93% as compared
to 92% for YOLOv7 model using DeTFly dataset.
The detection rate is 89.8% and 93.9% using
MIDGARD dataset with YOLOv7 and YOLOv7E,
respectively. YOLOv7 has false detections where it
detects random points from the image frame as a
UAV, as shown in Figure 4. It is found that YOLOv7
has 1225 false detections, whereas this count is
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
348

reduced to 36% by the proposed YOLOv7E in DetFly
dataset. Moreover, with MIDGARD data the false
detection rate reduced by 21% using YOLOv7E
where YOLOv7 has 443 false detections.
Figure 3: Detection Results (presenting missed targets in
YOLOv7).
Figure 4: False detection by YOLOv7.
From the above results, the performance of the
proposed YOLOv7E using an attention-based
mechanism is found to be better in detecting UAVs in
complex and diverse background environments. The
visual results with MIDGARD datasets are available
at: https://github.com/dapinderk-2408/YOLOv7E
4.4 Quantitative Performance Analysis
The performance of the proposed YOLOv7E is also
computed in terms of average precision (AP), recall,
mean average precision (mAP
0.5
), and mAP
0.5-0.95
where mAP
0.5
is the mean AP with Intersection over
Union (IoU) threshold 0.5 and mAP
0.5-0.95
takes the
average values with the IoU thresholds from 0.5 to
0.95 with step size 0.05. Here, IoU is the ratio of area
overlapped between the predicted box (P) and its
ground truth (G) and is defined by:
𝐼𝑜𝑈 =
𝑃∩𝐺
𝑃∪𝐺
(1)
The mAP with IoU threshold measures the
correctness of the predicted bounding boxes.
Moreover, precision and recall are defined based on
the positive and negative predictions. The results
given in the Table 2 presents the average precision,
recall and mAP values on the overall dataset for both
the YOLOv7 and YOLOv7E models.
Table 2: Performance Analysis.
Epochs Model Precision Recall mAP
0.5
mAP
0.5-
0.95
500 YOLOv7 0.92 0.75 0.84 0.47
YOLOv7E 0.98 0.89 0.92 0.59
1000 YOLOv7 0.97 0.86 0.91 0.60
YOLOv7E 0.98 0.89 0.92 0.61
Table 2 signifies the performance of YOLO models
based on different performance metrics. The
proposed model performed better than the existing
base model as the attention mechanism increases the
model learning capabilities by providing weights to
the features, thus improving performance. For
performance evaluation, the models are trained with
500 and 1000 epochs. The loss and other parameters
computed during training with 1000 epochs are
shown in Figure 5.
YOLOv7 is a complex model, so it takes more
time to learn. As shown in Figure 5, the performance
of the proposed YOLOv7E in terms of box loss,
objectness loss score, precision, recall, mAP
0.5
, and
mAP
0.5-0.95
improves continuously after 500 epochs
and is better than YOLOv7. For instance, box loss and
object loss converged more in YOLOv7E as
compared to YOLOv7. Similarly, precision, recall,
mAP
0.5
, and mAP
0.5-0.95
value increases and is higher
than YOLOv7. Here, the box loss depicts the
algorithm’s performance in locating an object's centre
and how well an object is covered by the anticipated
bounding box and is calculated as:
𝐿
=𝑚𝑒𝑎𝑛
𝐿
. (2)
Here L
CIoU
is the complete IoU loss that uses different
geometric factors such as aspect ratio, overlap area
and the central point distance, and is computed as:
𝐿
=1−𝐼𝑜𝑈+
𝜌
𝑝, 𝑝
𝑐
+𝛼𝑣
(3)
p and p
G
are the central points of the predicted
bounding box (P) and ground truth (G), respectively.
ρ(.) presented the Euclidean distance between the
central points, c is the diagonal length of the box, v &
α represents the discrepancy measure of width-to-
height ratio.
YOLOv7E: An Attention-Based Improved YOLOv7 for the Detection of Unmanned Aerial Vehicles
349
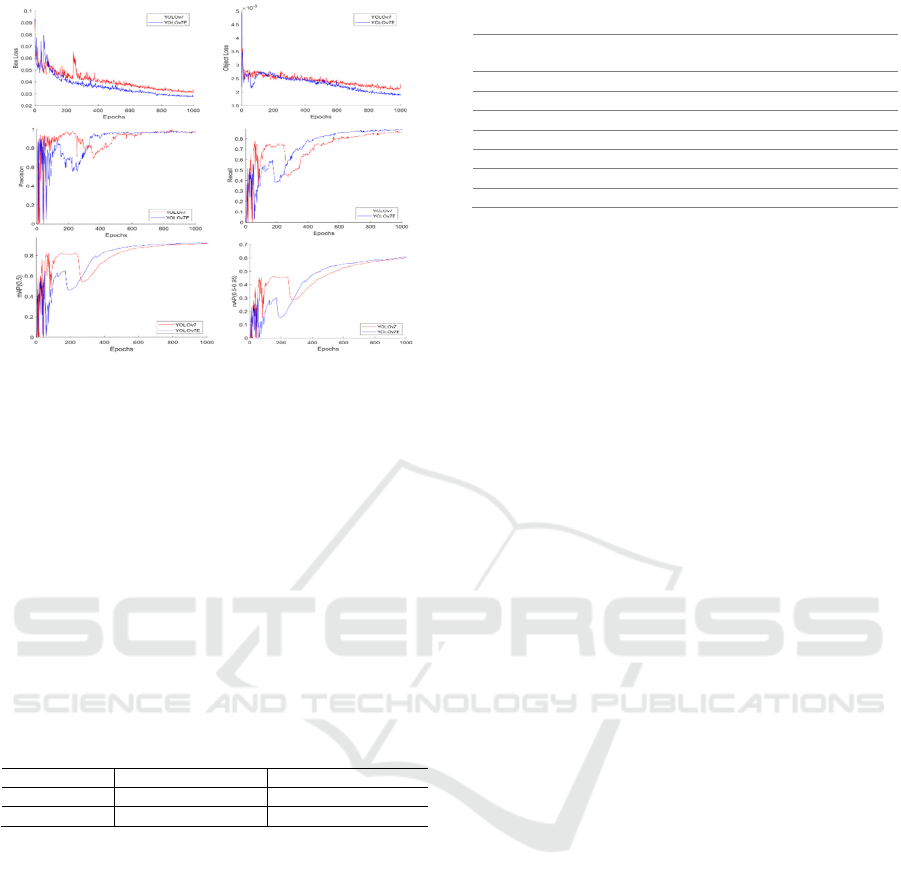
Figure 5: Performance Analysis of the proposed YOLOv7E
(1000 epochs).
Further, objectness is a probability measure for the
presence of an object in a suggested area of interest.
An item is probably present in the image window if
the objectivity is high. Further, in YOLO based
models, the objectness loss score is computed using
binary cross entropy (BCE) loss of the predicted
objectness probability and CIoU of the matched
target. The performance comparison given in Table 2
indicates the performance improvement with 1000
epochs. The performance of YOLOv7E is compared
to YOLOv7 based on inference time as shown in
Table 3.
Table 3: Inference Time per frame (in sec).
Dataset YOLOv7 YOLOv7E
DeTFly 0.20 0.23
MIDGARD 0.034 0.036
Based on these results, it is found that the
computational cost of YOLOV7E model is similar to
YOLOv7, with improved performance ensuring
effectiveness in the proposed field.
4.5 Comparison with Existing A2A
UAV Detection Models
There are few detection models developed for A2A
UAV detection problem in the past. The comparison
of the proposed YOLOv7E with the existing A2A
detection models (Zheng et al., 2021) based on AP is
presented in the Table 4:
Table 4: Performance Comparison (DeTFly Dataset).
Model Input size Iterations/
epochs*
AP
YOLOv3 [416,416] 7000 72.3
SSD512 [512,512] 46564 78.7
FPN [600,600] 49993 78.7
Cascade RCNN [640,640] 6652 79.4
Grid RCNN [600,600] 46564 82.4
YOLOv7 [640,640] 300* 84.17
YOLOv7E [640,640] 300* 91.2
The above results indicate the effectiveness of the
proposed YOLOv7E in terms of AP as it achieves
highest AP in comparison to the other existing
models.
5 CONCLUSION
The problem of UAV detection from other UAVs is a
complex task, and this work proposes a YOLOv7E:
an attention-based YOLOv7 model to achieve better
performance than the existing YOLOv7 architecture.
Attention-based approaches help to maintain both the
spatial and channel information to maintain the object
information in the deep layer architectures. In this
work, a lightweight EPSA block that extracts the
multi-scale spatial information with the essential
features across dimensions in the channel attention is
added to the backbone of the network. This addition
helps in extracting the multi-scale coarse spatial
information with a long-range channel dependency
and maintains the complexity of the model. The
proposed YOLOv7E is tested using the DeTFly
dataset to analyze its performance for UAV detection
in A2A complex scenarios. The performance in terms
of detection rate, false detection, precision, recall, and
mAP is improved by a proposed YOLOv7E compared
to the base model of YOLOv7. Hence, the proposed
method ensures the model's effectiveness for UAV
detection tasks in A2A scenarios. Further, it can be
tested for other object detection tasks to evaluate its
efficiency.
ACKNOWLEDGEMENTS
The author would like to thank TiHAN-IITH for their
support through project funding.
REFERENCES
Chen, J., Liu, H., Zhang, Y., Zhang, D., Ouyang, H., &
Chen, X. (2022). A Multiscale Lightweight and
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
350

Efficient Model Based on YOLOv7: Applied to Citrus
Orchard. Plants, 11(23), 3260. https://doi.org/
10.3390/plants11233260
Chen, X., Ma, W., Gao, W., & Fan, X. (2023). BAFNet:
Bottleneck Attention Based Fusion Network for Sleep
Apnea Detection. IEEE Journal of Biomedical and
Health Informatics, 1–12. https://doi.org/10.
1109/JBHI.2023.3278657
Dadboud, F., Patel, V., Mehta, V., Bolic, M., & Mantegh,
I. (2021). Single-Stage UAV Detection and
Classification with YOLOV5: Mosaic Data
Augmentation and PANet. 2021 17th IEEE
International Conference on Advanced Video and
Signal Based Surveillance (AVSS), 1–8.
https://doi.org/10.1109/AVSS52988.2021.9663841
Devassy, B. R., & Antony, J. K. (2023). Histopathological
image classification using CNN with squeeze and
excitation networks based on hybrid squeezing. Signal,
Image and Video Processing, 17(7), 3613–3621.
https://doi.org/10.1007/s11760-023-02587-y
Gonzalez, F., Caballero, R., Perez-Grau, F. J., & Viguria,
A. (2021). Vision-based UAV Detection for Air-to-Air
Neutralization. 2021 IEEE International Symposium on
Safety, Security, and Rescue Robotics (SSRR),
236–241. https://doi.org/10.1109/SSRR53300.2021.
9597861
Jamil, S., Fawad, Rahman, M., Ullah, A., Badnava, S.,
Forsat, M., & Mirjavadi, S. S. (2020). Malicious UAV
Detection Using Integrated Audio and Visual Features
for Public Safety Applications. Sensors, 20(14), 3923.
https://doi.org/10.3390/s20143923
Jiang, M., & Yin, S. (2023). Facial expression recognition
based on convolutional block attention module and
multi-feature fusion. International Journal of
Computational Vision and Robotics, 13(1), 21.
https://doi.org/10.1504/IJCVR.2023.127298
Khan, A., Sohail, A., Zahoora, U., & Qureshi, A. S. (2020).
A survey of the recent architectures of deep
convolutional neural networks. Artificial Intelligence
Review, 53(8), 5455–5516. https://doi.org/10.1007/
s10462-020-09825-6
Kizilay, E., & Aydin, I. (2022). A YOLOR Based Visual
Detection of Amateur Drones. 2022 International
Conference on Decision Aid Sciences and Applications
(DASA), 1446–1449. https://doi.org/10.1109/DASA
54658.2022.9765252
Leong, W. L., Wang, P., Huang, S., Ma, Z., Yang, H., Sun,
J., Zhou, Y., Abdul Hamid, M. R., Srigrarom, S., &
Teo, R. (2021). Vision-Based Sense and Avoid with
Monocular Vision and Real-Time Object Detection for
UAVs. 2021 International Conference on Unmanned
Aircraft Systems (ICUAS), 1345–1354. https://doi.
org/10.1109/ICUAS51884.2021.9476746
Li, Z., Wang, Y., Zhang, N., Zhang, Y., Zhao, Z., Xu, D.,
Ben, G., & Gao, Y. (2022). Deep Learning-Based
Object Detection Techniques for Remote Sensing
Images: A Survey. Remote Sensing, 14(10), 2385.
https://doi.org/10.3390/rs14102385
Liu, K., Sun, Q., Sun, D., Yang, M., & Wang, N. (2023).
Underwater target detection based on improved
YOLOv7. http://arxiv.org/abs/2302.06939
Liu, S., Qi, L., Qin, H., Shi, J., & Jia, J. (2018). Path
Aggregation Network for Instance Segmentation.
http://arxiv.org/abs/1803.01534
Sangam, T., Dave, I. R., Sultani, W., & Shah, M. (2022).
TransVisDrone: Spatio-Temporal Transformer for
Vision-based Drone-to-Drone Detection in Aerial
Videos.
Seidaliyeva, U., Akhmetov, D., Ilipbayeva, L., & Matson,
E. T. (2020). Real-Time and Accurate Drone Detection
in a Video with a Static Background. Sensors, 20(14),
3856. https://doi.org/10.3390/s20143856
Svanstrom, F., Englund, C., & Alonso-Fernandez, F.
(2021). Real-Time Drone Detection and Tracking With
Visible, Thermal and Acoustic Sensors. 2020 25th
International Conference on Pattern Recognition
(ICPR), 7265–7272. https://doi.org/10.1109/ICPR48
806.2021.9413241
Walter, V., Vrba, M., & Saska, M. (2020). On training
datasets for machine learning-based visual relative
localization of micro-scale UAVs. 2020 IEEE
International Conference on Robotics and Automation
(ICRA), 10674–10680. https://doi.org/10.1109/ICRA
40945.2020.9196947
Wang, C.-Y., Bochkovskiy, A., & Liao, H.-Y. M. (2022).
YOLOv7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors.
https://doi.org/2207.02696
Wang, Y., Chen, Y., Choi, J., & Kuo, C.-C. J. (2019).
Towards Visible and Thermal Drone Monitoring with
Convolutional Neural Networks. APSIPA Transactions
on Signal and Information Processing, 8(1).
https://doi.org/10.1017/ATSIP.2018.30
Woo, S., Park, J., Lee, J.-Y., & Kweon, I. S. (2018). CBAM:
Convolutional Block Attention Module.
https://doi.org/1807.06521
Yang, F., Zhang, X., & Liu, B. (2022). Video object
tracking based on YOLOv7 and DeepSORT.
https://doi.org/2207.12202
Zhang, H., Zu, K., Lu, J., Zou, Y., & Meng, D. (2021).
EPSANet: An Efficient Pyramid Squeeze Attention
Block on Convolutional Neural Network.
http://arxiv.org/abs/2105.14447
Zhang, Y., Fang, M., & Wang, N. (2019). Channel-spatial
attention network for fewshot classification. PLOS
ONE, 14(12), e0225426. https://doi.org/10.1371/
journal.pone.0225426
Zhao, H., Zhang, H., & Zhao, Y. (2023). YOLOv7-Sea:
Object Detection of Maritime UAV Images Based on
Improved YOLOv7. Proceedings of the IEEE/CVF
Winter Conference on Applications of Computer Vision
(WACV) Workshops, 233–238.
Zheng, Y., Chen, Z., Lv, D., Li, Z., Lan, Z., & Zhao, S.
(2021). Air-to-Air Visual Detection of Micro-UAVs:
An Experimental Evaluation of Deep Learning. IEEE
Robotics and Automation Letters, 6(2), 1020–1027.
https://doi.org/10.1109/LRA.2021.3056059.
YOLOv7E: An Attention-Based Improved YOLOv7 for the Detection of Unmanned Aerial Vehicles
351
