AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
Zhenyue Gu
a
, Benedikt Kolbeinsson
b
and Krystian Mikolajczyk
c
Department of Electrical and Electronic Engineering, Imperial College London, London, U.K.
Keywords:
Object Detection, Unmanned Aerial Vehicles (UAVs), Fisheye Lenses.
Abstract:
Accurate obstacle detection in Unmanned Aerial Vehicles (UAVs) using fisheye lenses is challenged by image
distortions. While advanced algorithms like Fast Region-Based Convolutional Neural Network (Fast R-CNN),
Spatial Pyramid Pooling-Net (SPP-Net), and You Only Look Once (YOLO) are proficient with standard im-
ages, they underperform on fisheye images due to serious distortions. We introduce a real-time fisheye object
detection system for UAVs, underpinned by specialized fisheye datasets. Our contributions encompass the
creation of UAV-centric fisheye datasets, a distillation-based (also termed Teacher-Student) training method,
and AirEyeSeg, a pioneering fisheye detector. AirEyeSeg achieved a Mask(mAP50) of 88.6% for cars on the
combined Visdorone and UAVid datasets and 84.5% for people on the SEE dataset using the Box(P) metric.
Our results demonstrate AirEyeSeg’s superiority over traditional detectors and validate our Teacher-Student
training approach, setting a benchmark in fisheye-lensed UAV object detection. The code is available at
https://github.com/Zane-Gu/AirEyeSeg.
1 INTRODUCTION
UAVs, commonly known as drones, have transitioned
from their initial military applications to diverse civil-
ian sectors, including agriculture, surveillance, topo-
graphical mapping, and logistics (Liu et al., 2023).
This evolution is attributed to technological advance-
ments and decreasing costs, making UAVs indispens-
able for both industrial and recreational purposes.
A technique pivotal to the functionality of UAV
systems is object detection (Jia et al., 2023). This
technique is essential for identifying the category and
position of objects of interest within images, thereby
providing comprehensive environmental information
crucial for scene analysis in computer vision. Given
the dynamic and unpredictable nature of aerial envi-
ronments, it is imperative for UAVs to possess swift
and accurate object detection capabilities to ensure
safety and avert potential collisions. Dynamic objects
such as people, cars etc., are of particular interest and
require real time updates due to their changing loca-
tions in addition to the moving UAV.
Despite the plethora of proficient object detection
algorithms, such as Fast R-CNN (Girshick, 2015),
SPP-Net (Purkait et al., 2017), and YOLO (Redmon
a
https://orcid.org/0000-0002-5182-1226
b
https://orcid.org/0009-0004-0333-6308
c
https://orcid.org/0000-0003-0726-9187
et al., 2016), which are adept at identifying obstacles
in standard images, challenges persist when dealing
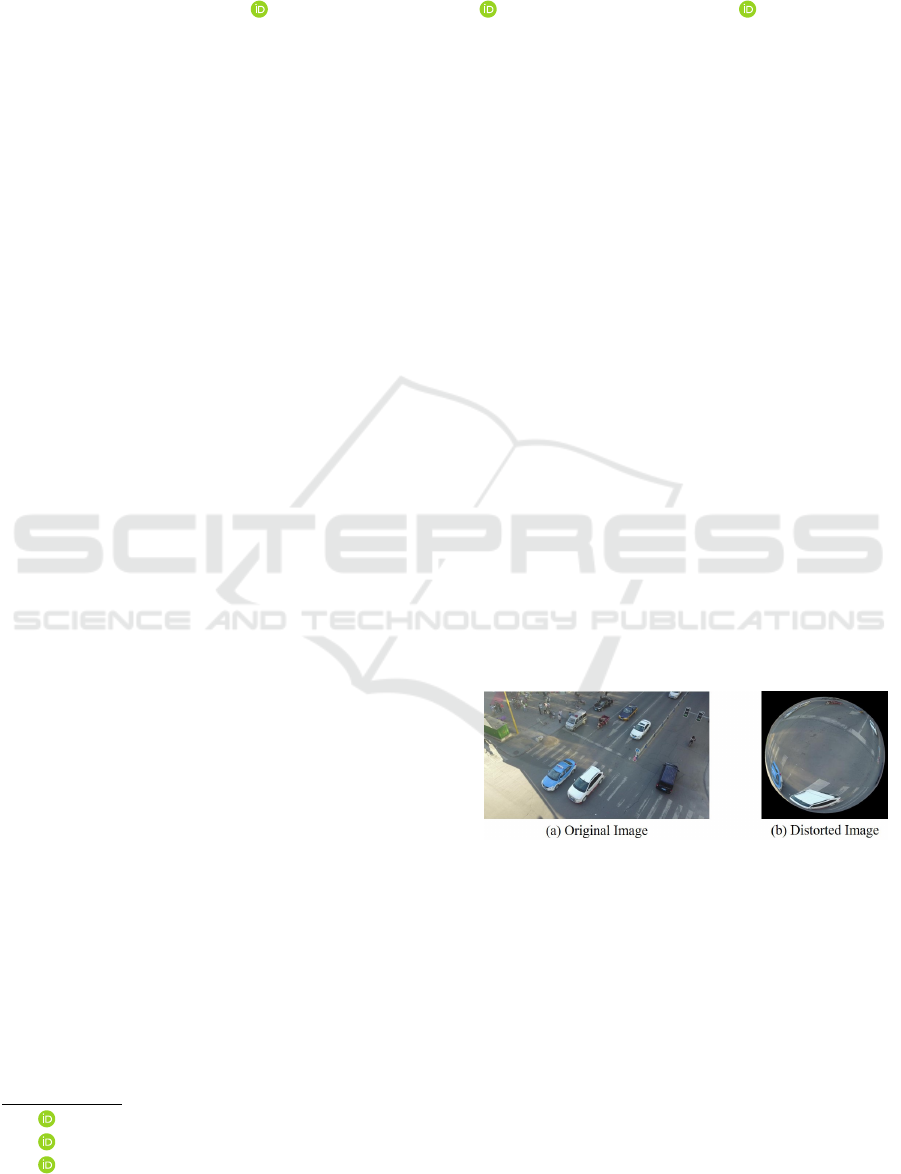
with images captured through fisheye lenses. The
expansive field of view offered by fisheye lenses in-
duces pronounced image distortions, especially near
the edges, thereby complicating the task of object de-
lineation (see Figure 1).
Figure 1: Example of pronounced distortions in a fisheye
image, particularly near the edges.
Addressing the challenges inherent in fisheye im-
age processing proves to be a complicated endeavor,
primarily due to the lack of comprehensive datasets
specific to fisheye lenses. Established datasets such
as Common Objects in Context (COCO) (Lin et al.,
2014), ImageNet (Deng et al., 2009), and Visual Ob-
ject Classes (VOC) (Everingham et al., 2010) do not
encompass UAV-centric views, rendering them sub-
optimal for the development of fisheye object de-
tectors. Moreover, the limited variations in distor-
tion present in current datasets highlight the neces-
546
Gu, Z., Kolbeinsson, B. and Mikolajczyk, K.
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection.
DOI: 10.5220/0012388600003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 546-557
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

sity for enriched datasets featuring diverse types of
distortions. Prior to initiating the training of our
fisheye-adapted detectors, it is imperative to recog-
nize the limitations of traditional training method-
ologies, which are heavily reliant on original ground
truth labels. These methodologies frequently fail to
enhance detector generalization, particularly in the
common absence of ground truth segmentation. To
surmount these challenges, we propose the integra-
tion of knowledge distillation, laying the groundwork
for a more adaptive and robust fisheye detector.
To sum up, the pivotal contributions of this re-
search are listed as follows:
• Implemented fisheye datasets to bridge the gap in
training detectors for UAVs in the field of com-
puter vision.
• Developed a distillation-based strategy for in-
stance segmentation using a foundation model.
• Introduced a novel application of segmentation-
based training for the YOLO framework in aerial
contexts.
• Engineered and validated AirEyeSeg, a fisheye
detector with robust generalization. Notably, it
surpasses the performance of detectors trained via
traditional methods and sets a new benchmark
over the baseline model, YOLOv8.
• Enhanced wire-specific detector to achieve supe-
rior detection rates for a broader array of typical
UAV obstacles.
The article is structured as follows: Section 2
delves into the evolution of object detection tech-
niques in computer vision. Section 3 elaborates on
our chosen datasets and their curation criteria. Sec-
tion 4 details our training data procedures, introduces
the teacher and student models, and describes dataset-
specific training approaches. Section 5 presents and
analyzes our experimental results. Finally, Section 6
summarizes our findings and suggests avenues for fu-
ture research.
2 RELATED WORK
Object detection in computer vision has undergone
significant evolution, marked by three pivotal mile-
stones: Traditional Detectors, CNN-Based Two-
Stage Detectors, and CNN-Based One-Stage Detec-
tors (Zou et al., 2023).
The 1990s heralded the dawn of early computer
vision techniques. During this period, algorithms
heavily depended on handcrafted features, primar-
ily due to the lack of powerful image representa-
tion methods (Viola and Jones, 2004). A quintessen-
tial model from this era is Deformable Part-Based
Model (DPM), which dominated multiple VOC de-
tection challenges and represented the pinnacle of tra-
ditional object detection methods. Felzenszwalb et
al. introduced DPM in 2008 as an enhancement of
the Histogram of Oriented Gradients (HOG) detec-
tor (Zhou et al., 2020), emphasizing a ”divide and
conquer” strategy in object detection (Felzenszwalb
et al., 2008). This methodology was later refined by
Girshick, who incorporated ”mixture models” to cater
to a broader range of object variations (Kong et al.,
2020). While modern object detectors have outper-
formed DPM in accuracy, they continue to be influ-
enced by its foundational concepts, including mixture
models and bounding box regression.
The renaissance of Convolutional Neural Network
(CNN) in 2012 (Krizhevsky et al., 2012) ushered in a
new era of advanced object detection techniques. R-
CNN was unveiled in 2014, merging selective search
with CNNs for object detection, albeit with high com-
putational costs (Girshick et al., 2014). To address
this, SPP-Net streamlined the computation of con-
volutional features (Purkait et al., 2017). Fast R-
CNN amalgamated the advantages of R-CNN and
SPP-Net, boosting both detection speed and preci-
sion (Girshick, 2015). However, its dependency on
proposal detection spurred the inception of Faster R-
CNN, which integrated a Region Proposal Network
(RPN) for streamlined region proposals (Girshick,
2015). Successive models, such as Region-based
Fully Convolutional Networks (RFCN) (Dai et al.,
2016) and Light head R-CNN (Li et al., 2017), further
refined the detection process. Feature Pyramid Net-
work (FPN) employed a top-down architecture, im-
proving object localization across various scales and
establishing new standards in object detection (Lin
et al., 2017a).
Turning to CNN-based one-stage detectors, the
YOLO model was groundbreaking, applying a singu-
lar neural network to the entire image for concurrent
bounding box and probability estimations (Redmon
et al., 2016). Single Shot Detector (SSD) augmented
detection accuracy using multireference and multires-
olution strategies (Liu et al., 2016). To address class
imbalance during training, RetinaNet introduced the
”focal loss” function, narrowing the accuracy dispar-
ity between one-stage and two-stage detectors (Lin
et al., 2017b). CornerNet reimagined detection as
keypoint prediction (Law and Deng, 2018), a con-
cept further streamlined by CenterNet (Zhou et al.,
2019). Embracing the Transformer architecture, De-
tection Transformer (DETR) provided end-to-end de-
tection without the need for anchors, with subsequent
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
547

models like Deformable DETR further enhancing this
methodology (Carion et al., 2020).
In summary, the trajectory of object detection has
witnessed transformative shifts, evolving from a re-
liance on handcrafted features to leveraging advanced
neural networks in a quest for enhanced accuracy and
efficiency. However, this pursuit becomes particularly
intricate when addressing object detection for UAVs
equipped with fisheye lenses, which introduce unique
distortions. Traditional training methods, while foun-
dational to the field, often prove suboptimal for the
specific challenges of fisheye lens distortions. Recog-
nizing this gap, our primary objective emerges: to en-
gineer real-time detectors adeptly optimized for such
lenses. To achieve this, we anchor our solution in the
knowledge distillation paradigm (Gou et al., 2021),
promising enhanced generalization and performance,
and harness the rapid inference capabilities of the
renowned YOLO framework, a CNN-based one-stage
detector.
3 EXPERIMENTAL DATASETS
Considering the challenges previously emphasized
with available datasets, we integrated existing UAV
datasets to optimize the training of our object detec-
tors. This section offers an overview of our selected
datasets, namely Visdrone (Zhu et al., 2021), UAVid
(Lyu et al., 2020), Drone Depth and Obstacle Seg-
mentation (DDOS) (Kolbeinsson and Mikolajczyk,
2023), and the genuine fisheye dataset, SEE
1
data.
Figure 2 showcases samples of these datasets. Sub-
sequent to this overview, we elucidate the specifics
related to these datasets and further explore the data
processing techniques adopted.
Figure 2: Selected samples from experimental datasets.
The VisDrone2019 dataset (Zhu et al., 2021),
encompasses 288 video clips (261,908 frames) and
1
The SEE dataset will be made available after the final
revision of this paper due to double blind review process.
10,209 static images. These were captured using a
range of drone-mounted cameras across 14 distinct
cities in China, spanning both urban and rural ar-
eas. The dataset captures a diverse array of objects,
including pedestrians, vehicles, and bicycles in both
sparse and densely populated regions. Our focus is
on the VisDrone-VID subset, containing 79 sequences
(33,366 frames) at 1344 x 756 resolution. To fit our
training emphasis on a resolution of 1280, we doubled
the original resolution prior to fisheye transformation.
This step ensures that, post-transformation, the fish-
eye images maintain a high level of detail, vital for
our model’s training. However, it’s worth noting that
VisDrone2019 provides ground truth only for object
detection, not instance segmentation. To circumvent
this limitation, we employed the Segment Anything
Model (SAM) (Kirillov et al., 2023) (Subsection 4.2)
to produce segmentation masks as ground truth, sub-
sequently facilitating our training process.
The UAVid dataset offers 4K high-resolution UAV
imagery centered on urban scenes, consisting of 42
video sequences with 420 labeled images spanning
eight classes, including Background clutter, Building,
Road, Tree, Low vegetation, Moving car, Static car,
and Human (Lyu et al., 2020). Designed for per-pixel
semantic labeling, its evaluation relies on the mean
Intersection over Union (mIoU) metric. Due to its
native 4K resolution, there’s no need to upscale be-
fore fisheye conversion, preserving the integrity and
details of training samples.
The DDOS dataset, also referred to as the wire
dataset, contains aerial drone images generated via
Airsim
2
simulator, each annotated with pixel-wise
segmentation masks. Designed to advance depth es-
timation and obstacle segmentation research, it en-
compasses roughly 200GB, featuring frames from
Neighbourhood (urban and residential) and Park (nat-
ural landscapes) environments. With a resolution of
1280 x 720, it consists of ten classes, including ultra-
thin (wires), thin structures, small mesh, large mesh,
trees, buildings, vehicles, people, animals, and others.
The dataset chiefly supports wire detector training,
predominantly from its 25,300-image Neighbourhood
segment. For evaluations, models are trained using
original DDOS labels, negating the need for resolu-
tion tweaks.
The SEE dataset, captured using a genuine fisheye
UAV, serves exclusively to evaluate our model’s per-
formance. It consists of 30,136 frames without any
ground truth labels. Thus, similar to the aforemen-
tioned datasets, we employed SAM to generate seg-
mentation masks for cars, people, trees, and buildings
as ground truth. All frames maintain a resolution of
2
https://microsoft.github.io/AirSim/
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
548

1280 x 960.
We have collated four datasets offering a spectrum
of views from urban to rural landscapes, essential
for advancing fisheye detector research. Renowned
datasets such as Pascal VOC, COCO, ImageNet, and
FishEye8K (Gochoo et al., 2023) proffer a vast col-
lection of images but fall short in providing UAV-
centric perspectives and wire representation—central
elements in our investigation. In contrast, our datasets
prioritize these critical features. Given their compre-
hensive nature, a requisite step involves their conver-
sion to a fisheye format, yielding datasets character-
ized by a spectrum of distortions and redressing pre-
vailing dataset inadequacies. Our training framework
focuses on cardinal obstacle classes, including cars
(spanning diverse vehicle types), people (aggregating
both humans and pedestrians), trees, and buildings.
It’s worth noting that Visdrone, UAVid, and DDOS
support both training and testing phases, however,
DDOS distinctively features wire classification while
omitting the people category, and the SEE dataset is
dedicated exclusively to testing. A comprehensive
discussion on the applied processing techniques is
scheduled for the subsequent section.
4 AirEyeSeg
In this section, we present our Fisheye object detec-
tor for aerial images. Figure 3 illustrates the Teacher-
Student training scheme employed to enhance our ob-
stacle detectors, ensuring robust generalization across
diverse focal lengths of fisheye lense. Before feed-
ing the chosen standard images into the teacher—a
foundation image segmentation model—they are con-
verted to a fisheye format which is discussed in Sec-
tion 4.1. We then present the segmentation teacher
and student models in Section 4.2 and Section 4.3,
respectively. We have employed Segment Anything
Model (SAM) (Kirillov et al., 2023) as the teacher
and YOLOv8 (Jocher et al., 2023) as the student. Sec-
tion 4.4 presents our training strategies inspired by
knowledge distillation framework (Gou et al., 2021).
We train various detectors to evaluate and compare
their performance in Section 5.
4.1 Fisheye Data Generation
As depicted in Figure 3, the initial phase of devel-
oping fisheye detectors necessitates the transforma-
tion of standard image datasets into a fisheye format.
Subsequently, data augmentation techniques are em-
ployed to enhance the dataset, culminating in a com-
prehensive repository of fisheye images.
4.1.1 Fisheye Distortions
We discuss the methodology for converting standard
images, also referred to as conventional images, into
fisheye format. The transformation process is based
on a method proposed by (Ye et al., 2020), wherein a
mapping is established from the fisheye image plane
to the conventional image plane. This mapping can be
reversed to projects conventional images into the fish-
eye domain. Conventional images are typically cap-
tured by a pinhole camera. The perspective projec-
tion associated with this model is articulated in Equa-
tion 1. On the other hand, fisheye cameras often em-
ploy the equidistant projection model, as described in
Equation 2 (Kannala and Brandt, 2006):
r
pinhole
= f tanθ, (1)
r
equidistance
= f θ, (2)
Here, θ represents the angle between the principal
axis and the incoming ray, r denotes the distance from
the image point to the principal point, and f is the fo-
cal length.
Both conventional and fisheye images can be un-
derstood as projections of a hemisphere onto a plane,
albeit using different projection models and view an-
gles. The projection model for fisheye images is illus-
trated in Figure 4.
The intricacies of the geometric imaging model
are elaborated upon in (Kannala and Brandt, 2006).
Assuming congruent focal lengths for both the per-
spective and equidistance projections, and setting the
maximum viewing angle θ
max
to 180
◦
, the transfor-
mation from the fisheye image point P
f
= (x
f
,y
f
) to
the conventional image point P
c
= (x
c
,y
c
) is articu-
lated in Equation 3:
r
c
= f tan(r
f
/ f ), (3)
In this context, r
c
= sqrt((x
c
−u
cx
)
2
+(y
c
−u
cy
)
2
) rep-
resents the distance between the image point P
c
and
its principal point U
c
= (u
cx
,u
cy
) in the conventional
image. Similarly, r
f
= sqrt((x
f
−u
f x
)
2
+(y
f
−u
f y
)
2
)
denotes the corresponding distance in the fisheye im-
age between the image point P
f
and its principal point
U
f
= (u
f x
,u
f y
).
The transformation relationship encapsulated in
Equation 3 is intrinsically modulated by the focal
length f . By instituting a foundational focal length
f
0
, the fisheye camera model is approximated to
span a hemispherical visual domain. Each image,
paired with its respective annotation from existing
standard image datasets, is subjected to this trans-
formation, employing the aforementioned mapping
function, thereby facilitating the synthesis of fisheye
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
549
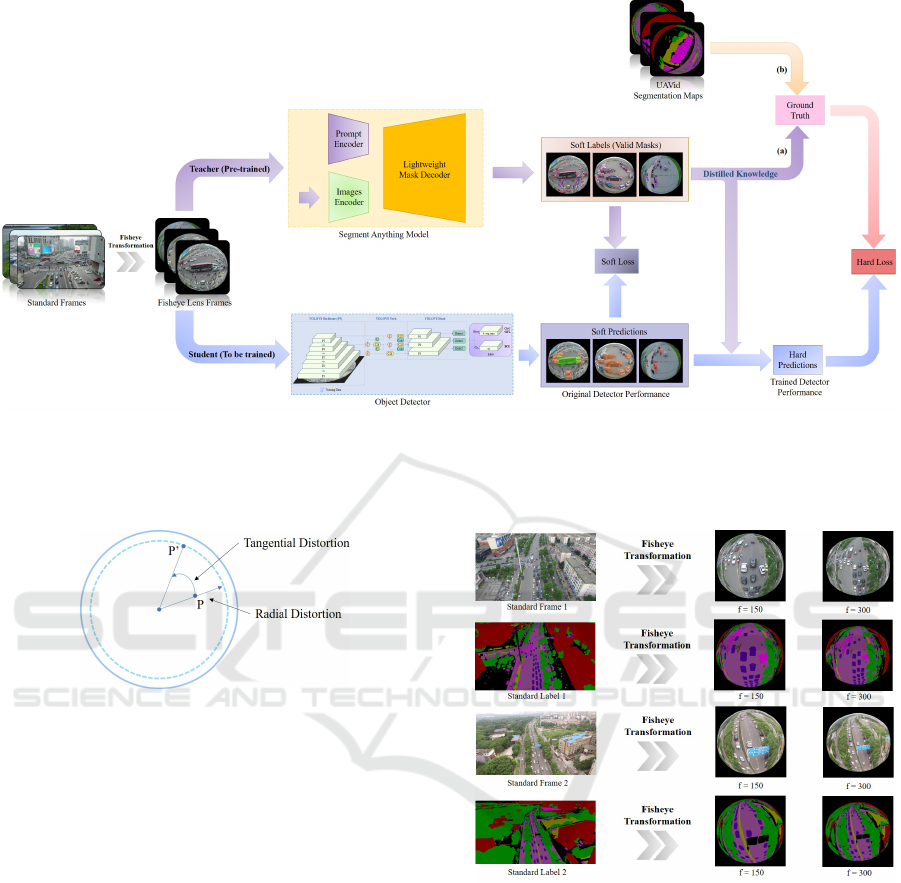
Figure 3: Teacher-Student training scheme for dual fisheye object detectors: A computer vision foundation model is the
teacher, guiding object detectors as students to enhance detection and segmentation for obstacle avoidance: (a) AirEyeSeg
training; (b) AirEyeGT training. The soft loss quantifies discrepancies between soft label and soft prediction probability
distributions, while the hard loss evaluates differences between ground truth and the student model’s hard predictions.
Figure 4: Illustration of fisheye distortion model. P is the
perspective imaging point and P
′
is the fisheye imaging
point. Radial distortion indicates deviation along the imag-
ing radius, while tangential distortion denotes displacement
along the tangential direction of the imaging point (Li et al.,
2020).
image datasets. Fisheye images are generated from
existing standard images, accompanied by their re-
spective segmentation maps, for both both f = 150
and f = 300, as illustrated in Figure 5. This augmen-
tation strategy is designed to enrich the diversity of
fisheye image datasets and to strengthen the general-
ization capability of detectors across different levels
of distortions.
4.1.2 Data Augmentation
To increase the diversity of our fisheye image
datasets, data augmentation is crucial, addressing the
inherent limitations in training image variance. We
incorporate horizontal flipping, rotation, and random
cropping to the standard images. Horizontal flip-
ping mirrors images along their vertical axis, enhanc-
ing orientation diversity. Rotational adjustments vary,
Figure 5: Transformation of original standard frames and
segmentation maps into their respective fisheye counter-
parts.
from pronounced shifts of ±90
◦
to subtle changes
ranging between −15
◦
and +15
◦
. Concurrently, ran-
dom cropping, truncating up to 20% of the image,
refines the model’s capability to detect partially ob-
scured objects.
4.1.3 Post-Processing
Upon securing segmentation maps from SAM (Kir-
illov et al., 2023), it is necessary to transform these
masks—which include both SAM-generated masks
and original dataset ground truth labels—into polygo-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
550
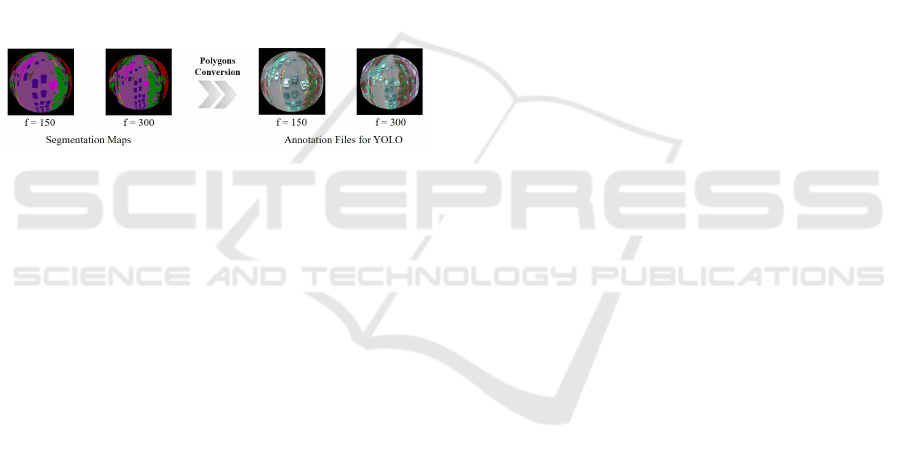
nal representations, a prerequisite for YOLO training
given its inability to directly interpret segmentation
maps. The process initiates by distinguishing each
object or class in an image via unique segmentation
map colors. For each identified class, a binary mask
is created, isolating specific class instances. Differen-
tiating multiple instances of the same class in an im-
age involves connected components analysis and as-
signing unique labels to interconnected regions. Each
instance is then transmuted into polygons based on
binary mask contours. Importantly, to mitigate po-
tential representation inaccuracies, polygons are ini-
tially generated for all object classes output by SAM,
with subsequent filtering to retain only those relevant
to our study. This method effectively curtails conver-
sion discrepancies. The resultant polygons are cata-
loged in the COCO format, as illustrated in Figure 6,
encompassing not only polygon coordinates but also
integrating vital metadata such as bounding boxes and
area.
Figure 6: Examples of conversion from segmentation masks
to annotation polygons.
4.2 Teacher: Image Segmentation
Foundation Model
Our methodology integrates SAM, a segmentation
model (Kirillov et al., 2023), as a foundational in-
structive entity throughout the comprehensive train-
ing process. Distinguished for its proficiency in seg-
menting a diverse array of objects, SAM serves as the
guiding force for the object detectors, which function
as students within the training framework. For com-
pleteness of this paper we briefly overview the archi-
tecture of SAM with its associated theoretical under-
pinnings but the details can be found in (Kirillov et al.,
2023).
Figure 7 presents SAM, which comprises three
primary components: an image encoder, a versa-
tile prompt encoder, and an efficient mask decoder.
Its image encoder system integrates a Vision Trans-
former (ViT) (Dosovitskiy et al., 2020), which is
pre-trained using Masked Autoencoders (MAEs) (He
et al., 2022) and tailored for high-resolution inputs
(Li et al., 2022). This encoder processes each image
once, offering the possibility of pre-prompt applica-
tion. The framework of prompt encoder distinguishes
between two types of prompts: sparse (such as points,
boxes, and text) and dense (like masks). Positional
encodings, in conjunction with specific learned em-
beddings, represent points and boxes. A renowned
text encoder from Contrastive Language-Image Pre-
training (CLIP) (Radford et al., 2021) manages free-
form text. For dense prompts, particularly masks,
convolutional embeddings are employed, which are
element-wise merged with the image embedding. The
mask decoder converts the amalgamated image and
prompt embeddings, together with an output token,
into a mask. The design, inspired by (Carion et al.,
2020), incorporates a refined transformer decoder
block followed by a dynamic mask prediction head.
This decoder block facilitates bi-directional cross-
attention between prompts and image embeddings.
After two block operations, the image embedding
undergoes upsampling. Subsequently, an Multilayer
Perceptron (MLP) transforms the output token into a
dynamic linear classifier, which ascertains the mask
foreground probability for each image pixel.
4.3 Student: Efficient Object Detector
We have chosen YOLOv8 (Jocher et al., 2023), the
most advanced iteration of the YOLO series, to func-
tion as our object detector, guided by the teacher
model. As depicted in Figure 8, YOLOv8 archi-
tecture encompasses four principal components: the
backbone, neck, head, and loss. While YOLOv8 is
grounded in the foundational principles of YOLOv5
(Jocher et al., 2022), it incorporates several notable
enhancements.
YOLOv8 adapts the backbone of YOLOv5, in-
troducing modifications to the Cross-Stage-Partial-
connection (CSP) Layer, now termed the C2f module,
which divides the feature map into two segments. The
first segment undergoes convolution, while the second
is concatenated with the first’s output, enhancing the
learning capacity of CNNs and amalgamating high-
level features with contextual data to boost detection
accuracy while reducing computational cost.
The neck of YOLOv8 employs multi-scale feature
fusion, utilizing the Feature Pyramid Network (FPN)
(Lin et al., 2017a) and Path Aggregation Network
(PAN) (Liu et al., 2018) architectures to integrate fea-
tures from various network layers (Ju and Cai, 2023).
The FPN upsamples to enhance the bottom feature
map, and the PAN downsamples to strengthen the top
feature map, ensuring precise predictions across di-
verse image sizes and optimizing computational ef-
ficiency by incorporating the FP-PAN and omitting
convolution operations during upsampling.
Contrasting to YOLOv5’s coupled head, YOLOv8
has an anchor-free, decoupled head (Terven and
Cordova-Esparza, 2023), allowing independent pro-
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
551
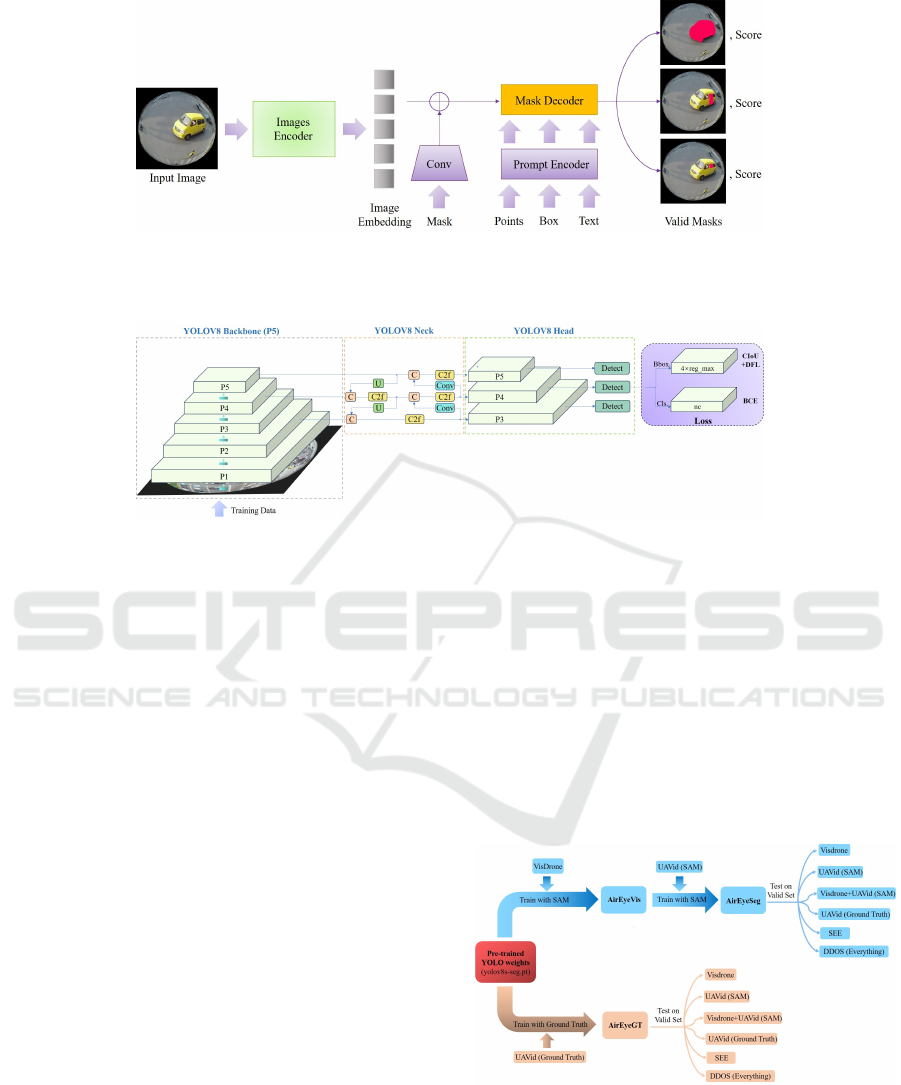
Figure 7: The architecture of SAM. A heavyweight image encoder produces an image embedding, which can be swiftly
queried using diverse input prompts to generate object masks at near real-time speeds. For prompts that correspond to
multiple objects, SAM is capable of producing several valid masks along with their associated confidence scores.
Figure 8: The architecture of YOLOv8. The architecture primarily comprises four components: Backbone, Neck, Head, and
Loss.
cessing of objectness, classification, and regression
tasks and enhancing overall accuracy by enabling
each branch to specialize. The output layer employs
the sigmoid function for the objectness score and the
softmax function for class probabilities, indicating the
likelihood of a bounding box containing an object
and the probability of objects correlating with each
potential class, respectively. The model incorporates
the Complete IoU (CIoU) and Distribute Focal Loss
(DFL) as loss functions to address bounding box loss.
Together, these loss functions optimize the model’s
ability to detect objects, particularly enhancing accu-
racy with smaller objects.
In our approach, we employed YOLOv8’s seg-
mentation variant, YOLOv8-Seg (Jocher et al., 2023).
This model is based on the CSPDarknet53 extractor
and features a unique C2f module, diverging from tra-
ditional YOLO neck designs. Following this are two
segmentation heads and detection modules mirroring
those in YOLOv8. Notably, YOLOv8-Seg sets new
benchmarks in object detection and semantic segmen-
tation without sacrificing speed or efficiency.
4.4 Training Strategies
As underscored earlier, the objective of this study is
to develop object detectors specifically designed for
fisheye lenses, with the aim of creating multiple de-
tectors utilizing diverse datasets for comparative eval-
uation. In this endeavor, two distinct training strate-
gies were employed on different datasets: two detec-
tors were developed using distillation-based training
on the VisDrone and UAVid datasets to identify com-
mon UAV obstacles encountered in real-world scenar-
ios, such as cars, people, trees, and buildings. Con-
versely, subsequent detectors employing a traditional
training strategy primarily targeted the detection of
wires, cars, buildings, and trees on the DDOS dataset.
Figure 9: Teacher-Student training on Visdrone and UAVid
datasets: AirEyeSeg is trained utilizing SAM-annotated
labels as ground truth, whereas AirEyeGT employs real
ground truth labels.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
552
4.4.1 Teacher-Student Training
As depicted in Figure 9, the original YOLOv8 seg-
mentation weight, yolov8s-seg.pt, was fine-tuned uti-
lizing fisheye lens images extracted from the Visdrone
and UAVid datasets. A salient distinction emerges
between these detectors; AirEyeSeg was trained em-
ploying SAM-generated masks for both its validation
and test sets, while AirEyeGT utilized real ground
truth labels from the UAVid dataset for the corre-
sponding sets. It is noteworthy that AirEyeGT was
exclusively trained on the UAVid dataset—a decision
predicated on the absence of instance segmentation
masks in the Visdrone dataset, as discussed in Sec-
tion 3. This training approach was adopted to en-
able a comparative analysis between the two detec-
tors, thereby elucidating the efficacy of SAM in real-
time segmentation prediction.
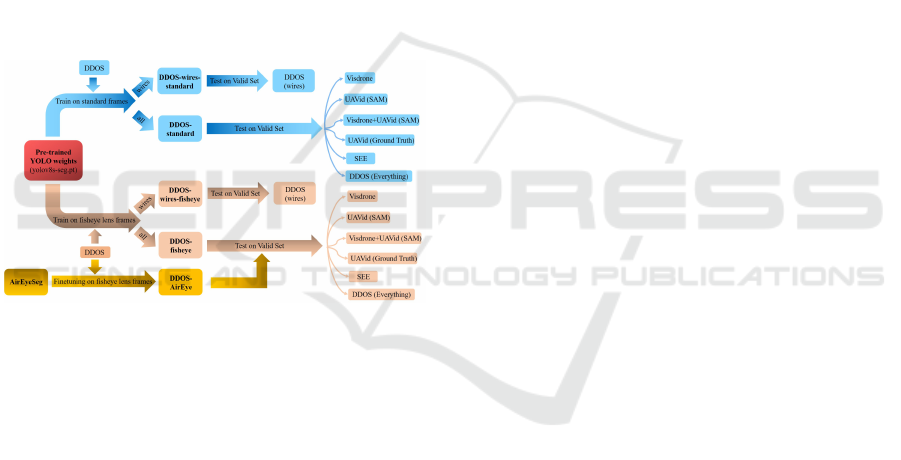
4.4.2 Ground Truth Based Training
Figure 10: Traditional training on DDOS dataset; Five de-
tectors were trained; two on standard frames (distinguish-
ing between wires-only and all obstacles), and two on fish-
eye lens frames with similar distinctions. Additionally, the
weights of AirEyeSeg were fine-tuned for comparison. All
training phases utilized real ground truth labels.
A traditional training strategy was employed for the
DDOS dataset as presented in Figure 10. Within this
framework, five detectors were meticulously trained
using real ground-truth labels across training, vali-
dation, and testing sets, enabling a thorough com-
parison of detection performance. This also pro-
vided insight into contrasting this traditional training
performance with our devised Teacher-Student ap-
proach. In addition, two detectors were trained us-
ing standard non-distorted frames from the DDOS
dataset. The first, denoted as DDOS-wires-standard,
was tailored specifically for wire detection, while the
second, termed DDOS-standard, was engineered to
identify a variety of obstacles as previously men-
tioned. In the case of detectors trained on fisheye
lens frames, the training approach mirrored that of the
standard frame detectors, leading to the development
of DDOS-wires-fisheye and DDOS-fisheye detectors,
respectively. Additionally, the weight of AirEyeSeg
was fine-tuned on fisheye lens frames, establishing
a comparative performance benchmark against other
detectors.
5 RESULTS ANALYSIS
In this section, we introduce the metrics for our ex-
perimental evaluation, followed by an analysis and
visualization of our detectors’ performance across all
datasets.
To evaluate the segmentation performance of our
trained YOLOv8-based detectors we use Precision (P)
(Euzenat, 2007) and mean Average Precision (mAP)
(Everingham et al., 2010). In the subsequent anal-
ysis of experimental results, the performance of the
trained detectors is evaluated using mAP50, which
is determined with an Intersection over Union (IoU)
threshold of 0.50.
5.1 Comparative Analysis of Developed
Detectors
The primary aim of this subsection is to rigorously
evaluate the performance of the models across all
datasets, emphasizing the Mask (mAP50) and Box
(P) metrics. Initially, we assess the developed detec-
tors on the test sets of our training datasets, including
Vidrone, UAVid, and DDOS. Subsequently, to further
objectively evaluate their performance, we tested the
detectors on the SEE dataset, which is unfamiliar to
all detectors and is only used for testing.
5.1.1 Evaluation on VisDrone, UAVid and DDOS
Figure 11 compares the performance of five detec-
tors against YOLOv8 on the combined Visdrone and
UAVid datasets, showcasing the effectiveness of our
Teacher-Student training approach compared to the
other detectors trained in a traditional ground truth su-
pervised approach. Notably, AirEyeGT and AirEye-
Seg, trained with distilled knowledge, exhibit supe-
rior mAP50 values. Specifically, in the cars category,
AirEyeSeg achieved an mAP50 of 88.6%, followed
by AirEyeGT at 85.6%. The similar performance
of the knowledge-distilled detectors in Mask(mAP50)
and Box(P) indicates the high reliability of the SAM-
generated annotations. However, AirEyeSeg consis-
tently outperforms AirEyeGT across most classes due
to its extended training dataset.
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
553
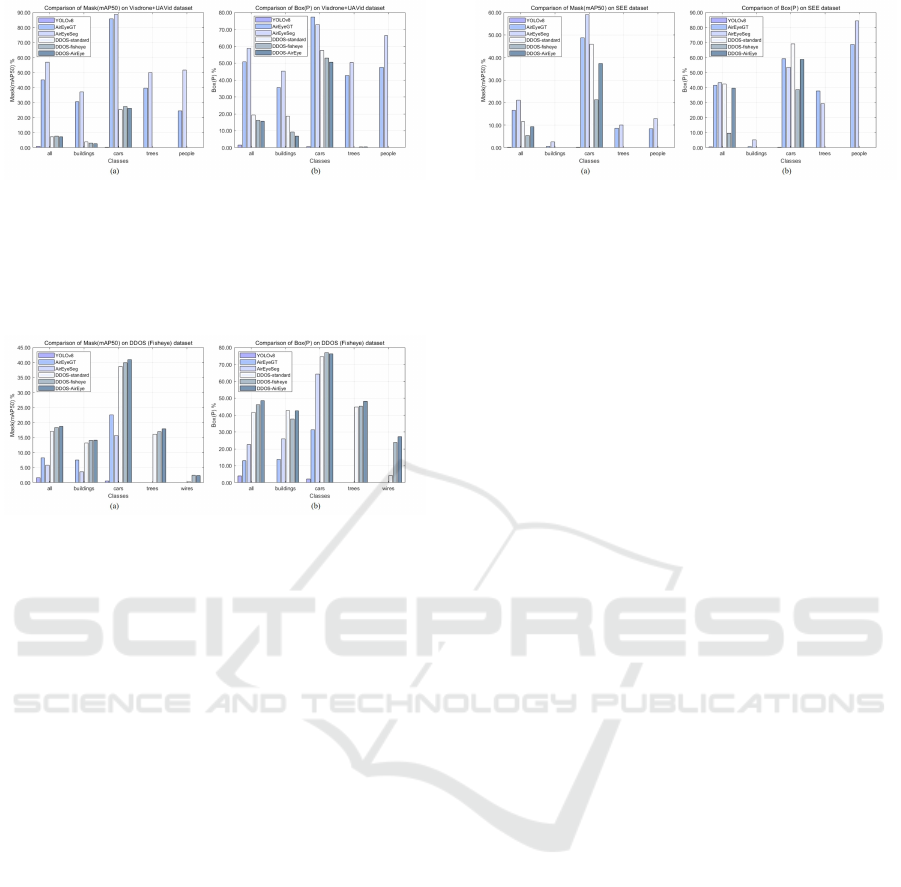
Figure 11: Comparative analysis of metrics across six algo-
rithms on the combined Visdrone and UAVid Datasets: (a)
Mask(mAP50); (b) Box(P). The evaluated algorithms com-
prise the original YOLOv8, AirEyeGT, AirEyeSeg, DDOS-
standard, DDOS-fisheye, and DDOS-AirEye. See Figure 9
and 10 for how different detectors were trained.
Figure 12: Comparative Analysis of Metrics Across Six
Algorithms on the DDOS dataset: (a) Mask(mAP50); (b)
Box(P). The evaluated algorithms comprise the original
YOLOv8, AirEyeGT, AirEyeSeg, DDOS-standard, DDOS-
fisheye, and DDOS-AirEye. See Figure 9 and 10 for how
different detectors were trained.
Figure 12 presents the performance metrics of the
six models on the DDOS dataset. As anticipated,
DDOS-standard, DDOS-fisheye, and DDOS-AirEye
outperform AirEyeGT and AirEyeSeg in both met-
rics, as they were trained and tested on synthetic
DDOS data only, while AirEyeGT and AirEyeSeg
were trained on real VisDrone and AUVid datasets.
Remarkably, DDOS-AirEye eclipses DDOS-standard
and DDOS-fisheye in obstacle identification, register-
ing performance enhancements of 1.7% and 0.5% in
Mask(mAP50), and 7% and 2.5% in Box(P), respec-
tively. This performance surge can be attributed to
the fine-tuning of DDOS-AirEye based on AirEye-
Seg weights, underscoring the broad applicability of
our Teacher-Student training paradigm across diverse
datasets. The consistent outcomes observed between
AirEyeSeg and AirEyeGT further validate the authen-
ticity of teacher-generated annotations.
5.1.2 Evaluation on SEE Dataset
To corroborate our earlier findings, we evaluated six
algorithms on the SEE dataset that was captured in
different environment and was not used for training
the detectors therefore can be considered of different
distribution than the training sets.
Figure 13: Comparative analysis of metrics across six
algorithms on the SEE dataset: (a) Mask(mAP50); (b)
Box(P). The evaluated algorithms comprise the original
YOLOv8, AirEyeGT, AirEyeSeg, DDOS-standard, DDOS-
fisheye, and DDOS-AirEye. See Figure 9 and 10 for how
different detectors were trained.
As illustrated in Figure 13, the outcomes align
with our previous findings. Notably the top perfor-
mance is significantly lower than for the other datasets
presented in Figure 11 and 12, where the models
were trained from different train/test splits of the same
datasets. Despite that, using the Mask(mAP50) met-
ric as a reference, detectors that employ the Teacher-
Student training paradigm demonstrate superior per-
formance relative to those trained on the DDOS
dataset using conventional methods. This superior-
ity is further emphasized by the overall class detec-
tion values represented by Box(P). Across both met-
rics, the performance of the student detectors remains
consistent. Notably, AirEyeSeg not only consistently
surpasses AirEyeGT in the Mask(mAP50) metric but
also outperforms in the overall classes as indicated
by the Box(P) metric, showcasing its enhanced accu-
racy in obstacle detection. Additionally, AirEyeSeg
stands out in detecting the people class, achieving an
84.5% accuracy rate as denoted by the Box(P) metric.
These findings underscore the potency of the Teacher-
Student training approach for fisheye detectors.
In addition, when assessed across both metrics,
DDOS-AirEye consistently surpasses the DDOS-
fisheye detector, further emphasizing the superior
adaptability of our student detector. Importantly, the
DDOS-standard detector also demonstrates excep-
tional performance, rivaling AirEyeSeg in the Box(P)
metric. Such performance can be attributed to the
minimal distortion present in the SEE dataset. Con-
sidering that the SEE dataset more accurately reflects
standard frames compared to training datasets with
varied distortion levels, the DDOS-standard detector
attains noteworthy test results.
5.2 Detection Visualizations
Here, we highlight visual results from our top-
performing detectors, AirEyeSeg and DDOS-AirEye,
compared with the original YOLOv8, to under-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
554
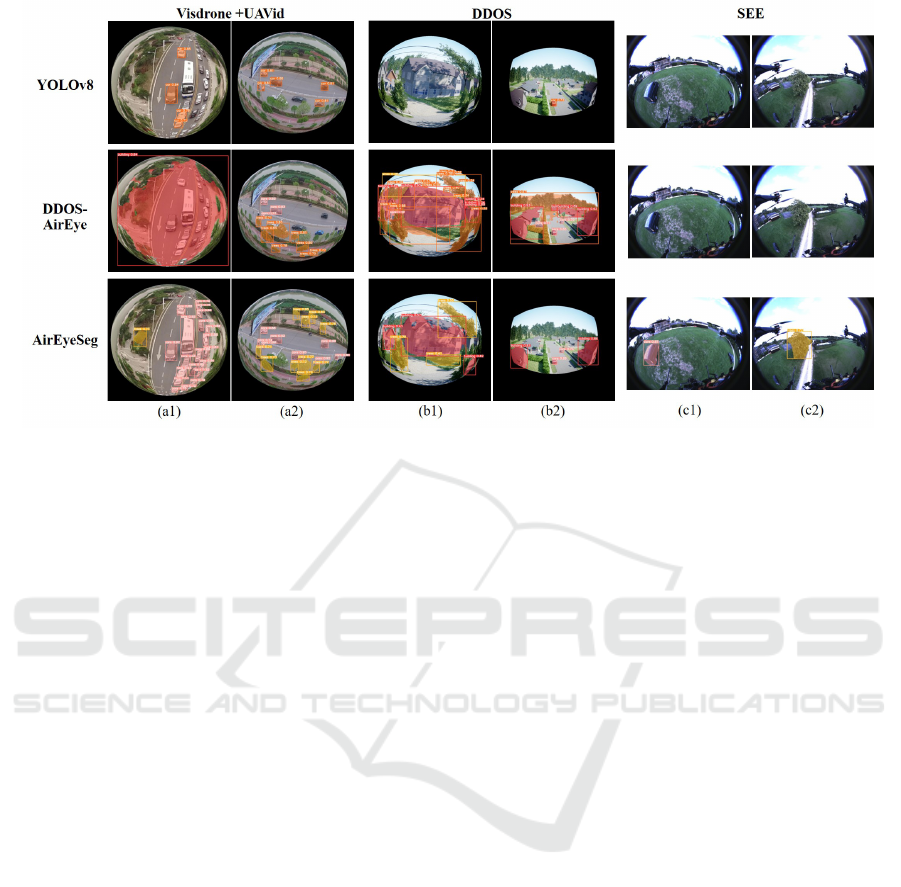
Figure 14: Comparative visualization of obstacle detection outcomes for developed algorithms vs. YOLOv8 across all
datasets: (a) samples from Visdrone and UAVid datasets; (b) samples from DDOS dataset; (c) samples from SEE dataset.
score our advancements. These visualizations vividly
demonstrate the precision of developed detectors in
identifying and delineating common obstacles and
wires across various datasets.
We visually showcase our detectors’ ability to
identify obstacles like cars, trees, buildings, and
wires, each annotated with a class label and confi-
dence score. These visuals, as seen in Figure 14, not
only highlight our algorithms’ accuracy but also echo
our earlier quantitative findings.
6 CONCLUSIONS
Our rigorous analysis underscores the potentials of
the foundation models in Teacher-Student training
approach for object detection pertinent to fisheye
UAVs, with AirEyeSeg exemplifying notable superi-
ority over conventional detectors and evidencing the
robustness of teacher-generated labels. However, the
nuanced and slender characteristics of wires introduce
persistent challenges in detection. As we delineate
future trajectories, pivotal research avenues include:
1) Probing advanced YOLO variants, building on
YOLO’s foundational success in our study and aiming
to harness the innovations of its latest iterations; 2)
Refining the transformation from segmentation masks
to polygons, a critical step to enhance the granularity
and precision of detector evaluations; 3) Expanding
the scope of Teacher-Student training methodologies,
leveraging their demonstrated efficacy across diverse
realms within computer vision.
ACKNOWLEDGEMENTS
This work was supported by Innovate UK project
10021134.
REFERENCES
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European conference on
computer vision, pages 213–229. Springer.
Dai, J., Li, Y., He, K., and Sun, J. (2016). R-fcn: Object de-
tection via region-based fully convolutional networks.
Advances in neural inf. proc. systems, 29.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE conference on computer vi-
sion and pattern recognition. Ieee.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Euzenat, J. (2007). Semantic precision and recall for on-
tology alignment evaluation. In Proc. 20th Interna-
tional Joint Conference on Artificial Intelligence (IJ-
CAI), pages 348–353. AAAI Press.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88:303–338.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
555

part model. In 2008 IEEE conference on computer
vision and pattern recognition, pages 1–8. Ieee.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Gochoo, M., Otgonbold, M.-E., Ganbold, E., Hsieh, J.-W.,
Chang, M.-C., Chen, P.-Y., Dorj, B., Al Jassmi, H.,
Batnasan, G., Alnajjar, F., Abduljabbar, M., and Lin,
F.-P. (2023). Fisheye8k: A benchmark and dataset for
fisheye camera object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR) Workshops.
Gou, J., Yu, B., Maybank, S. J., and Tao, D. (2021). Knowl-
edge distillation: A survey. International Journal of
Computer Vision, 129:1789–1819.
He, K., Chen, X., Xie, S., Li, Y., Doll
´
ar, P., and Girshick,
R. (2022). Masked autoencoders are scalable vision
learners. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
16000–16009.
Jia, X., Tong, Y., Qiao, H., Li, M., Tong, J., and Liang,
B. (2023). Fast and accurate object detector for au-
tonomous driving based on improved yolov5. Scien-
tific reports, 13(1):1–13.
Jocher, G., Chaurasia, A., Qiu, J., and Ultralytics (2023).
Ultralytics yolov8: State-of-the-art model for real-
time object detection, segmentation, and classifica-
tion. https://github.com/ultralytics/ultralytics. Ac-
cessed: 2023-08-28.
Jocher, G., Chaurasia, A., Stoken, A., Borovec, J., Kwon,
Y., Michael, K., Fang, J., Yifu, Z., Wong, C., Montes,
D., et al. (2022). ultralytics/yolov5: v7. 0-yolov5 sota
realtime instance segmentation. Zenodo.
Ju, R.-Y. and Cai, W. (2023). Fracture detection in pe-
diatric wrist trauma x-ray images using yolov8 algo-
rithm. arXiv preprint arXiv:2304.05071.
Kannala, J. and Brandt, S. S. (2006). A generic camera
model and calibration method for conventional, wide-
angle, and fish-eye lenses. IEEE transactions on pat-
tern analysis and machine intelligence, 28(8):1335–
1340.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., et al. (2023). Segment anything. arXiv
preprint arXiv:2304.02643.
Kolbeinsson, B. and Mikolajczyk, K. (2023). DDOS: The
drone depth and obstacle segmentation dataset. arXiv
preprint arXiv:2312.12494.
Kong, T., Sun, F., Liu, H., Jiang, Y., Li, L., and Shi,
J. (2020). Foveabox: Beyound anchor-based object
detection. IEEE Transactions on Image Processing,
29:7389–7398.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. Advances in neural information processing
systems, 25.
Law, H. and Deng, J. (2018). Cornernet: Detecting objects
as paired keypoints. In Proceedings of the European
conference on computer vision (ECCV), pages 734–
750.
Li, T., Tong, G., Tang, H., Li, B., and Chen, B. (2020).
Fisheyedet: A self-study and contour-based object
detector in fisheye images. IEEE Access, 8:71739–
71751.
Li, Y., Mao, H., Girshick, R., and He, K. (2022). Exploring
plain vision transformer backbones for object detec-
tion. pages 280–296.
Li, Z., Peng, C., Yu, G., Zhang, X., Deng, Y., and Sun,
J. (2017). Light-head r-cnn: In defense of two-stage
object detector. arXiv preprint arXiv:1711.07264.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Liu, H., Duan, X., Lou, H., Gu, J., Chen, H., and Bi,
L. (2023). Improved gbs-yolov5 algorithm based on
yolov5 applied to uav intelligent traffic. Scientific Re-
ports, 13(1):9577.
Liu, S., Qi, L., Qin, H., Shi, J., and Jia, J. (2018). Path ag-
gregation network for instance segmentation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 8759–8768.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In Computer Vision–ECCV 2016:
14th European Conference, Amsterdam, The Nether-
lands, October 11–14, 2016, Proceedings, Part I 14,
pages 21–37. Springer.
Lyu, Y., Vosselman, G., Xia, G.-S., Yilmaz, A., and Yang,
M. Y. (2020). Uavid: A semantic segmentation dataset
for uav imagery. ISPRS Journal of Photogrammetry
and Remote Sensing, 165:108 – 119.
Purkait, P., Zhao, C., and Zach, C. (2017). Spp-net: Deep
absolute pose regression with synthetic views. arXiv
preprint arXiv:1712.03452.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., et al. (2021). Learning transferable visual models
from natural language supervision. pages 8748–8763.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
556

computer vision and pattern recognition, pages 779–
788.
Terven, J. and Cordova-Esparza, D. (2023). A comprehen-
sive review of yolo: From yolov1 and beyond. arxiv
2023. arXiv preprint arXiv:2304.00501.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International journal of computer vision,
57:137–154.
Ye, Y., Yang, K., Xiang, K., Wang, J., and Wang, K.
(2020). Universal semantic segmentation for fisheye
urban driving images. In 2020 IEEE International
Conference on Systems, Man, and Cybernetics (SMC),
pages 648–655. IEEE.
Zhou, W., Gao, S., Zhang, L., and Lou, X. (2020). His-
togram of oriented gradients feature extraction from
raw bayer pattern images. IEEE Transactions on Cir-
cuits and Systems II: Express Briefs, 67(5):946–950.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019). Objects as
points. arXiv preprint arXiv:1904.07850.
Zhu, P., Wen, L., Du, D., Bian, X., Fan, H., Hu, Q., and
Ling, H. (2021). Detection and tracking meet drones
challenge. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 44(11):7380–7399.
Zou, Z., Chen, K., Shi, Z., Guo, Y., and Ye, J. (2023). Ob-
ject detection in 20 years: A survey. Proceedings of
the IEEE.
AirEyeSeg: Teacher-Student Insights into Robust Fisheye UAV Detection
557
