
Assessing Routing Decisions of Search and Rescue Teams in Service of an
Artificial Social Intelligence Agent
Volkan Ustun
1 a
, Ronit Jorvekar
2
, Nikolos Gurney
1 b
, David Pynadath
1,2 c
and Yunzhe Wang
3 d
1
Institute for Creative Technologies, University of Southern California, Playa Vista, CA, U.S.A.
2
Department of Computer Science, University of Southern California, Los Angeles, CA, U.S.A.
3
Department of Computer Science, Columbia University, New York, NY, U.S.A.
Keywords:
Artificial Social Intelligence, Graph Neural Networks, Route Planning, Urban Search and Rescue.
Abstract:
In the context of Urban Search and Rescue (USAR) missions, efficient routing performance is of paramount
importance for the success of a USAR team. Artificial Social Intelligence (ASI) agents could play a cru-
cial role in guiding and interacting with these teams, and an analysis of the routing choices made by USAR
teams can offer valuable insights into their overall performance and provide guidance for interventions by
ASI agents. This study capitalizes on recent advancements in Graph Neural Networks, transformers, and at-
tention models to harness their capabilities as neural heuristics for rapidly generating near-optimal routes in
routing challenges. Specifically, we propose a real-time decision framework to scrutinize and evaluate rout-
ing decisions executed by participants during the DARPA ASIST Minecraft USAR Task. This assessment
involves comparing the routing decisions made by participants and routes concurrently generated and recom-
mended by neural heuristics employing Graph Neural Networks with attention mechanisms. Furthermore, our
investigation delves into the potential of routing decision assessments as informative indicators for an ASI
agent, aiding in identifying scenarios necessitating intervention. This research contributes to using quantita-
tive metrics, such as routing efficiency, as meaningful signals for ASI agents to monitor the performance of
USAR teams through integrating state-of-the-art AI techniques. Ultimately, this integration could enhance the
efficiency and effectiveness of an ASI in guiding search and rescue operations.
1 INTRODUCTION
Autonomous agents have the potential to enhance
teamwork by automatically assessing and providing
assistance during task performance (Sukthankar et al.,
2007; Webber et al., 2019). Furthering research in this
domain is the objective of DARPA’s ASIST program,
which employs a simulated urban search and rescue
(USAR) task using a Minecraft environment to eval-
uate autonomous agents (Freeman et al., 2023). This
task environment is utilized to run experiments with
distributed teams of three participants aided by an Ar-
tificial Social Intelligence (ASI) agent acting as an ad-
visor. The success and safety of the USAR team are
heavily reliant on routing decisions, necessitating the
tracking of participant and team routing decisions by
a
https://orcid.org/0000-0002-7090-4086
b
https://orcid.org/0000-0003-3479-2037
c
https://orcid.org/0000-0003-2452-4733
d
https://orcid.org/0000-0003-3862-1163
a capable USAR ASI agent.
A USAR ASI agent can use routing in multiple
ways. For instance, it can aid with real-time routing
decisions of search and rescue teams by utilizing the
outputs of a route generator resembling a navigation
app that creates routes and recommends alternatives
based on present data such as road conditions, traffic
congestion, accidents, and more. However, humans
do not always strictly adhere to the recommendations
of a navigation app because they consider their own
private information, including preferences and their
physiological and emotional states. To illustrate, a
driver with a car full of hungry kids may choose to
stop and eat dinner early after the app recommends
a re-route rather than following the recommendation.
Similar to how the app performs real-time path plan-
ning and offers choices to the user based on current
data, a USAR ASI agent can ingest routing sugges-
tions and merge them with other mission-related in-
formation and the affective state of the USAR team to
provide more effective guidance.
Ustun, V., Jorvekar, R., Gurney, N., Pynadath, D. and Wang, Y.
Assessing Routing Decisions of Search and Rescue Teams in Service of an Artificial Social Intelligence Agent.
DOI: 10.5220/0012388100003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 313-320
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
313

Another example of how an ASI agent can lever-
age routing is to monitor the team’s routing decisions
to assess the team’s overall state. For instance, a de-
cline in the quality of routing decisions may indicate
potential issues within the search and rescue team or
suggest that the team is not fully leveraging avail-
able information. The ASI agent can use these ob-
servations and inferences to provide improved sug-
gestions and interventions, ultimately enhancing the
team’s performance.
Generating good routing options in real-time is
critical for both use cases mentioned above, as they
require considering the current state of the USAR
mission. However, this task is challenging because
ASIST’s USAR routing is similar to the family of NP-
Hard Traveling Salesman Problems (TSPs). As a re-
sult, heuristics must be employed to find candidate
solutions, as is the case with many practical appli-
cations (Boussa
¨
ıd et al., 2013). One helpful insight
for developing heuristics for routing problems is that
the problem instances often share common character-
istics or patterns, as demonstrated by (Cappart et al.,
2021) in a trucking company routing problem where
the company needs to generate daily routes for the
same city with slight variations due to traffic con-
ditions. These similarities provide opportunities for
data-dependent machine learning approaches that can
exploit common patterns (Bengio et al., 2021). In re-
cent years, Graph Neural Networks (GNNs) with at-
tention mechanisms have emerged as effective heuris-
tic alternatives for combinatorial optimization prob-
lems (Cappart et al., 2021). Leveraging such an ap-
proach as a neural heuristic can rapidly generate good
paths that utilize the similarities in routing require-
ments of a Minecraft USAR task. A real-time ASI
agent prototype can take advantage of this capability
to explore the routing options available to the SAR
team under varying conditions.
(Wang et al., 2023) discusses our preliminary ex-
plorations on how GNNs with attention mechanisms
can be leveraged as neural heuristics to generate good
routes for particular states of Minecraft USAR tasks.
We build on this earlier work and present a more capa-
ble pipeline that utilizes more expressive embeddings
and higher-quality training data, resulting in 11% im-
provement in the length of the generated routes. Fur-
thermore, we perform a new exploratory analysis of
the data collected on participant teams performing the
Minecraft USAR task and discuss how scrutinizing
routing performance can guide the timing of the in-
terventions provided by an ASI agent.
2 BACKGROUND
Combinatorial optimization (CO) is an established
interdisciplinary field that has numerous real-world
applications, including routing (Korte and Vygen,
2012). Its primary goal is to optimize a cost or
objective function by selecting a subset from a fi-
nite set while adhering to selection constraints. CO
strives to obtain a unique and optimal solution for
each problem, but the complexity of certain problems
can make this impractical. In such cases, practition-
ers often rely on problem-specific heuristic method-
ologies (Boussa
¨
ıd et al., 2013). However, practi-
cal situations frequently involve problem instances
that share specific characteristics or patterns (Cappart
et al., 2021). These similarities present opportunities
for data-dependent machine-learning approaches that
can leverage these patterns (Bengio et al., 2021). For
example, (Cappart et al., 2021)cite the example of
a trucking company’s daily routing solutions for the
same city, with slight variations in travel times due to
varying traffic conditions.
Graph Neural Networks (GNNs) are a potent ma-
chine learning architecture that exploits structural, re-
lational, and compositional biases to facilitate geo-
metric deep learning (Gilmer et al., 2017). GNNs ag-
gregate information from structural and feature-based
(e.g., node or edge type) graph data into simpler rep-
resentations of nodes and edges. By parameteriz-
ing this aggregation, they can be trained end-to-end
against a loss function. GNNs can operate on higher
complexity data than what can be represented in regu-
lar Euclidean structures, such as an image (2D) or text
(1D). GNNs achieve this by being order-invariant,
propagating on each node in the graph independently,
ignoring the input order, and using the graph structure
to guide propagation. These innovations empower
GNN models to ”reason” about a graph, make gen-
eral inferences, and use those inferences to make pre-
dictions and classifications successfully (Zhou et al.,
2020). In recent years, GNNs have been used as neu-
ral heuristics to generate solutions for CO problems
(Vesselinova et al., 2020). The primary promise of
GNNs in this role is that the learned vector represen-
tations encode critical graph structures to help solve
CO problems more efficiently (Cappart et al., 2021).
In 2018, (Kool et al., 2018) proposed a
transformer-like encoder-decoder architecture based
on Graph Attention Networks (Veli
ˇ
ckovi
´
c et al.,
2017) for general routing problems. Their approach
trained an encoder-decoder neural network using an
actor-critic reinforcement learning approach on ran-
domly generated routing problems. The training did
not require optimal solutions to the training instances
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
314

and could be done in advance. With the trained
model, it was possible to generate high-quality so-
lutions to SAR routing problems quickly. Recently,
we utilized Kool et al.’s codebase (2018) and aug-
mented it to generate routing solutions for an Arti-
ficial Social Intelligence (ASI) agent (Wang et al.,
2023). Our task involved a capacitated vehicle rout-
ing with-profits model that mapped to the tasks and
roles of human participants in a Minecraft USAR mis-
sion. Using the trained models, we were able to gen-
erate reasonable solutions quickly, informing the ASI
agent of potentially good solutions for the given mis-
sion state.
2.1 Minecraft USAR Test Environment
One of the main obstacles in creating an agent that can
aid human teams is assessing its performance. Prior
studies, such as the Electric Elves (Chalupsky et al.,
2002), demonstrated the potential of deploying such
agents in a real-world research lab. However, they
did not quantitatively evaluate their impact on team-
work in the traditional social science sense. There-
fore, a significant accomplishment of the ASIST pro-
gram has been the development of a robust testbed
implemented in a game-based (Minecraft) environ-
ment, which enables distributed teaming tasks and al-
lows for thorough quantitative evaluations (Freeman
et al., 2023). Our approach is to model players, the
team, and team processes within the Minecraft en-
vironment as Partially Observable Markov Decision
Processes (POMDPs). Moreover, our agent incorpo-
rates input from analytical components of the testbed
as sensors to measure the team and the impact of in-
terventions. Our agent uses behavioral data to inform
these POMDP models through Inverse Reinforcement
Learning (IRL) and then uses these POMDPs recur-
sively to form a Theory of Mind about the team to
reason about the expected utility of alternate interven-
tions. (Pynadath et al., 2023)
The DARPA ASIST Minecraft SAR task environ-
ment (Figure 1) is an immersive training platform de-
signed to create Artificial Social Intelligence (ASI)
agents. The game’s objective is to rescue victims
of an urban disaster while earning points. The vic-
tims can be either non-critical or critical, and criti-
cal victims require a coordinated effort to save. The
game environment includes various challenges, such
as risks, where a player can get trapped and need as-
sistance from teammates, and rubble, which can im-
pede access to victims. Teams consist of three play-
ers who can choose from three roles: medical special-
ist (medic), hazardous material specialist (engineer),
and search specialist (transporter). The medics can
triage victims and rescue frozen teammates, the engi-
neers can clear rubble, and the transporters can trans-
port victims. The ASI agents are not embodied team
members. Still, they can communicate via text chat
with human team members (who can communicate
through a shared audio channel).
3 APPROACH
In the Minecraft USAR environment, participants are
required to perform a range of tasks across different
locations. The primary objective of this environment
is to triage victims and move them to secure areas,
with the order of victim triage being crucial for mis-
sion success due to time constraints. Therefore, the
medic role needs to focus on minimizing travel dis-
tance, which is similar to the Traveling Salesman’s
Problem, an NP-Hard optimization problem. How-
ever, in this setting, not all relevant locations are
known in advance, making it impossible to create an
optimal tour before the mission commences. Instead,
the ASI agent requires a general framework to quickly
generate satisfactory solutions to support or monitor
participant performance.
As mentioned, previous work in the ASIST pro-
gram (Wang et al., 2023) builds on the codebase
developed by (Kool et al., 2018) and presents a
framework that defines a semantic graph based on
Minecraft USAR task maps. This semantic graph
captures all the main map entities and structures, in-
cluding rooms, connections between rooms, victims,
and rubble locations, among other features that could
be utilized in navigation decisions as depicted in Fig-
ure 2. In this representation, each role has different
objective nodes; for example, the medic role utilizes
the victim nodes, whereas the engineer role requires
the rubble nodes that block the victims. To calculate
distances between nodes of interest, such as victims,
we use Dijkstra’s algorithm (Dijkstra, 1959), which
considers the layout of the environment. The orig-
inal framework includes a pipeline to extract infor-
mation from the maps and convert the resulting dis-
tance matrix into a set of 2D coordinates first using
Metric Multidimensional Scaling (mMDS) (Kruskal,
1978; Cox and Cox, 2008), also known as Princi-
pal Coordinate Analysis (PCoA), and then the John-
Lindenstrauss Transform (JLT) (Johnson and Linden-
strauss, 1984) while preserving distance information
from the original distance matrix (Indyk et al., 2017).
The 2D coordinates are then scaled to [0, 1] to fit the
original codebase’s requirements. The previous work
used neural heuristics for route planning on this 2D
coordinate set and converted the resulting routes back
Assessing Routing Decisions of Search and Rescue Teams in Service of an Artificial Social Intelligence Agent
315

Figure 1: The participant’s (medic) interface while playing the Minecraft USAR Scenario.
to the semantic map representation for visualization,
analysis, and interfacing purposes.
Our updated framework removes the final step in
the pipeline and uses the coordinates in 36D space
output by mMDS directly in route planning neural
heuristics. This alteration to the pipeline allows for
better preservation of the original distance matrix, as
converting back to 2D space was causing a loss of pre-
cision. The 36D coordinates serve as initial node em-
beddings for GNN representations. Additionally, we
experimented with including victim type as an addi-
tional node embedding, given the importance of dis-
tinguishing between critical and regular victims for
triage.
We simplified the roles of the transporter and en-
gineer by assuming they would follow the medic and
perform tasks as required. For example, the trans-
porter transports victims and assists in triaging critical
victims while the engineer clears rubble that blocks
victims or exits in threat rooms. While a more com-
plex logic could yield potential gains, a simple heuris-
tic in which the engineer and transporter follow the
medic was sufficient to generate routes to complete
the mission on time. This simplification also stream-
lines GNN model training by using the total distance
traveled by the medic as the primary cost/objective
function.
To train the GNN models, we generated 7,000 se-
mantic maps, similar to the number of training in-
stances used in our preliminary explorations, con-
structed similarly to the Minecraft USAR layouts,
with variations in victim locations, threat rooms, and
rubble blockages. In addition, we defined ten addi-
tional semantic maps as test instances, two of which
are the original maps used in the Minecraft USAR
task environment.
4 EXPERIMENTS
We trained our model(s) with an actor-critic reinforce-
ment learning approach on the 7,000 randomly gen-
erated semantic maps on the base layout. With this
approach, we did not supervise the training with the
optimal solutions but rather generated gradients based
on the best-known solution found so far. We can uti-
lize the trained models in two different ways: (1) As a
route generator, where the ASI agent could utilize the
model to suggest routes to the team members, and (2)
As a team tracker, where the ASI agent could utilize
the model to track the team performance with respect
to the near-optimal routes generated by the trained
model.
4.1 Route Generation
The success of Minecraft USAR missions heavily re-
lies on effective navigation in the Minecraft envi-
ronment. When the locations of victims are known
in advance, minimizing the total mission time for
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
316
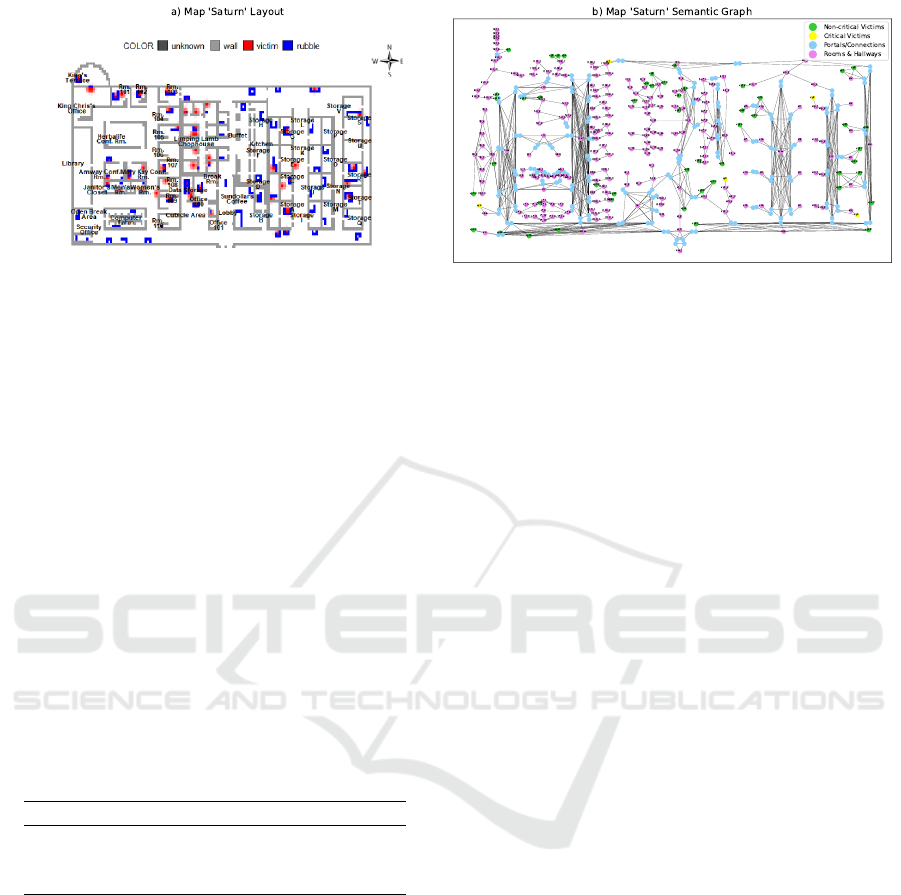
Figure 2: Minecraft USAR Task Map for the Saturn layout and the corresponding Semantic Graph.
the medic is comparable to solving a TSP problem.
Therefore, if an ASI agent can access near-optimal
routes, it can use them to suggest victim triage plans.
We applied this approach to compare the quality of
solutions for different configurations, as shown in
Table 1. Although all three configurations produce
routes that complete the mission within the 1020-
second time limit, directly utilizing the 36D node em-
beddings significantly improves the solution quality,
as expected. Moreover, adding victim type as an addi-
tional node embedding to our representation leads to
slight improvements in solution quality since utilizing
victim type information could enhance synchroniza-
tion among the participants. Finally, the two ground
truth layouts used in the Minecraft USAR experi-
ments have solution times of 765 and 770 seconds,
respectively, which are well below the 1020-second
mark.
Table 1: Mission completion times in seconds for the test
set instances.
Model Average Median St. Dev
2D 770.06 767.34 42.16
36D 699 699.12 41.32
36D + Type 685.62 682.66 34.24
Although victim locations may be known in ad-
vance, planning the route from scratch may not al-
ways be feasible. The team may do things differently
than the suggested routes, and hence, the route gen-
eration process must consider various starting states.
Our solution pipeline can accommodate such changes
in initializations. For instance, in a Human Subject
Study, we demonstrated that we could run our solu-
tion pipeline from any point during the experiment,
given the state of the Minecraft USAR task. Fur-
thermore, the generated routing suggestions could en-
hance the team’s performance for the remainder of the
mission compared to what had happened in the ac-
tual mission. In a particular experiment, for example,
a human subject team’s performance in scored game
points could have improved by 30 % if they followed
the routing suggestion generated by our pipeline for
the rest of the mission at the 2/3rd mark.
However, in both the Minecraft USAR environ-
ment and real-life USAR missions, it is typically not
feasible to know the locations of victims in advance.
Therefore, the actual use case is more complex, even
with real-time near-optimal route planning capabil-
ity. For instance, in the Minecraft USAR environ-
ment, each participant is provided unique knowledge
based on their roles, including information about po-
tential victim locations, threat rooms, sensory cues to
assist in finding victims, and more. In Human Subject
Experiments, participants begin the scenario with this
knowledge and simultaneously execute the assigned
search and rescue task while exploring the environ-
ment. When we initiated our solution pipeline with
the same knowledge and only planned for the known
artifacts (but perceived additional information during
the execution of the planned routes), the model lo-
cated and triaged 85% of the victims in around 660
seconds, leaving enough time for further exploration.
However, we did not implement an exploration algo-
rithm to augment our model for this task version.
4.2 Team Tracking
An ASI agent participating in the DARPA ASIST pro-
gram is expected to facilitate better teamwork through
interventions. Although there are various approaches
to making such interventions, monitoring the naviga-
tion performance of a team and identifying significant
shifts in this performance can be a valuable indicator
for the ASI agent. In the Minecraft USAR environ-
ment described by (Freeman et al., 2023), a Human
Subject Research study was carried out to evaluate the
performance of ASI agents. The study involved 242
trials with different configurations, and our analysis
focuses on 238 of these trials (due to data issues with
the remaining 4). Our investigation aims to determine
Assessing Routing Decisions of Search and Rescue Teams in Service of an Artificial Social Intelligence Agent
317
whether the neural heuristics’ near-optimal routes can
be utilized to track the navigation performance of hu-
man teams.
Each trial includes a metadata file that captures
the Minecraft environment state during the mission.
At mission times 0, 3, 5, 8, and 11 minutes, we took
snapshots of the environment state and used our so-
lution pipeline to generate solutions for the remain-
ing tasks based on that specific state. It is important
to note that our solution pipeline only focuses on un-
finished tasks and does not attempt to complete tasks
that have already been completed, such as triaging
a victim. This approach allowed us to gather a list
of lower bounds on mission completion times based
on the progress made by the team up to each specific
mission time. We then used these hypothetical com-
pletion times to calculate the deviation from the near-
optimal route that was calculated at time 0, which rep-
resents a complete solution generated with perfect in-
formation. By tracking these deviations over time, we
can detect significant changes in the team’s navigation
performance and identify opportunities for interven-
tion.
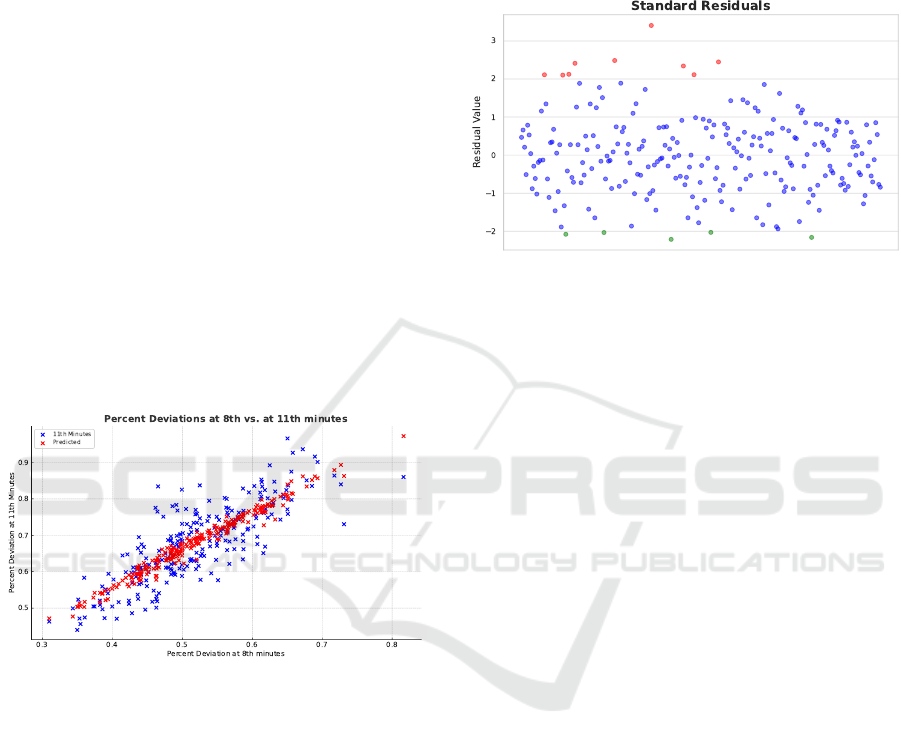
Figure 3: Multivariable linear regression analysis of percent
deviations from the optimal route.
To analyze the data, we used multivariable linear
regression, and even with the inherent configuration
variations in each trial, there is a trendline as shown
in Figure 3. We expect that for most teams, the devi-
ation from the optimal route will increase over time,
following the trendline. However, major deviations
from this trendline would indicate a significant shift
in the team’s navigation performance, which would
warrant intervention.
To identify major deviations from the expected
trendline, we can examine the standard residual plots
of the multivariable linear regression model, as shown
in Figure 4. In particular, any standard residual above
2 (represented by the red dots on the plot) would war-
rant further investigation to determine whether an in-
tervention is needed to improve the team’s perfor-
mance. Conversely, standard residuals less than -
2 (represented by the green dots on the plot) could
indicate areas where the team’s navigation perfor-
mance can be improved, providing valuable insights
into their overall performance.
Figure 4: Standard residuals from the multivariable linear
regression model of deviations from optimal route.
5 DISCUSSION
We have significantly improved the existing solu-
tion pipeline, resulting in better solution quality and
demonstrating its potential as a reliable tool for a
USAR ASI agent. However, it’s important to note that
the pipeline’s performance superior to human par-
ticipant teams was expected to some extent due to
its access to maps and victim locations. Nonethe-
less, Graph Neural Networks offer a robust architec-
ture for developing neural heuristics for combinatorial
problems like routing, particularly when there is sig-
nificant similarity among problem instances. Graph
Neural Networks’ flexibility and ability to adapt to
changes in objective functions make them an appro-
priate choice for handling additional problem infor-
mation through node embeddings. This flexibility,
along with the ability to rapidly generate routing so-
lutions under different conditions, including starting
with limited information similar to human participant
teams, allows the ASI agent to better evaluate the
routes available to a USAR team.
To speed up training while still generating qual-
ity solutions, we made the assumption in our solution
pipeline that the engineer and the transporter would
follow the medic, as we found that using a more in-
sightful heuristic for routing them did not result in any
improvements in our exploratory experiments. How-
ever, we acknowledge that this assumption may not
be the most effective for an actual deployment, and
further improvements may be necessary to optimize
the use of the transporter and the engineer.
Although we believed that monitoring the naviga-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
318

tion performance of participants and detecting devi-
ations would provide valuable insights for the ASI
agent on the state of the teams, we were unable to
test these ideas due to budget cuts. Furthermore, in
our exploratory analyses, we did not have enough in-
formation to determine whether teams with high stan-
dard residual values had actual problems. Thus, our
results are mainly exploratory, and further investiga-
tion is needed to assess the effectiveness of our pro-
posed approach.
6 CONCLUSIONS
We have developed a versatile routing system that uti-
lizes neural heuristics to efficiently guide a real-time
ASI agent on available routing options for a USAR
team based on the current state of the mission. This
system can serve as a reliable tool for the ASI agent
to analyze routing options for the USAR team it is as-
sisting. Additionally, the framework enables the ASI
agent to monitor the team’s navigation performance
and identify any potential difficulties they may be ex-
periencing. By leveraging this information along with
other insights, detecting such issues can prompt effec-
tive interventions by the ASI agent.
ACKNOWLEDGEMENTS
Part of the effort depicted is sponsored by the U.S.
Army Research Laboratory (ARL) under contract
number W911NF-14-D-0005 and by the Defense Ad-
vanced Research Projects Agency (DARPA) under
contract number W911NF2010011, and that the con-
tent of the information does not necessarily reflect the
position or the policy of the Government or the De-
fense Advanced Research Projects Agency, and no of-
ficial endorsements should be inferred.
REFERENCES
Bengio, Y., Lodi, A., and Prouvost, A. (2021). Machine
learning for combinatorial optimization: a method-
ological tour d’horizon. European Journal of Oper-
ational Research, 290(2):405–421.
Boussa
¨
ıd, I., Lepagnot, J., and Siarry, P. (2013). A survey
on optimization metaheuristics. Information sciences,
237:82–117.
Cappart, Q., Ch
´
etelat, D., Khalil, E., Lodi, A., Morris, C.,
and Veli
ˇ
ckovi
´
c, P. (2021). Combinatorial optimiza-
tion and reasoning with graph neural networks. arXiv
preprint arXiv:2102.09544.
Chalupsky, H., Gil, Y., Knoblock, C. A., Lerman, K., Oh, J.,
Pynadath, D. V., Russ, T. A., and Tambe, M. (2002).
Electric elves: Agent technology for supporting hu-
man organizations. AI magazine, 23(2):11–11.
Cox, M. A. and Cox, T. F. (2008). Multidimensional scal-
ing. In Handbook of data visualization, pages 315–
347. Springer.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische mathematik, 1(1):269–
271.
Freeman, J., Huang, L., Wood, M., and Cauffman, S. J.
(2023). Evaluating artificial social intelligence in an
urban search and rescue task environment. In Compu-
tational Theory of Mind for Human-Machine Teams:
First International Symposium, ToM for Teams 2021,
Virtual Event, November 4–6, 2021, Revised Selected
Papers, pages 72–84. Springer.
Gilmer, J., Schoenholz, S. S., Riley, P. F., Vinyals, O., and
Dahl, G. E. (2017). Neural message passing for quan-
tum chemistry. In International conference on ma-
chine learning, pages 1263–1272. PMLR.
Indyk, P., Matou
ˇ
sek, J., and Sidiropoulos, A. (2017). 8:
low-distortion embeddings of finite metric spaces. In
Handbook of discrete and computational geometry,
pages 211–231. Chapman and Hall/CRC.
Johnson, W. B. and Lindenstrauss, J. (1984). Extensions of
lipschitz mappings into a hilbert space 26. Contempo-
rary mathematics, 26.
Kool, W., Van Hoof, H., and Welling, M. (2018). Atten-
tion, learn to solve routing problems! arXiv preprint
arXiv:1803.08475.
Korte, B. and Vygen, J. (2012). The traveling salesman
problem. In Combinatorial Optimization, pages 557–
592. Springer.
Kruskal, J. B. (1978). Multidimensional scaling. Num-
ber 11. Sage.
Pynadath, D., Gurney, N., Kenny, S., Kumar, R., Marsella,
S., Matuszak, H., Mostafa, H., Sequeira, P., Ustun, V.,
and Wu, P. (2023). Effectiveness of teamwork-level
interventions through decision-theoretic reasoning in
a minecraft search-and-rescue task. In Proceedings
of the 2023 international conference on autonomous
agents & multiagent systems.
Sukthankar, G., Sycara, K., Giampapa, J. A., Burnett, C.,
and Preece, A. (2007). Towards a model of agent-
assisted team search. In Procceedings of the First An-
nual Conference of the International Technology Al-
liance in Network and Information Science.
Veli
ˇ
ckovi
´
c, P., Cucurull, G., Casanova, A., Romero, A., Lio,
P., and Bengio, Y. (2017). Graph attention networks.
arXiv preprint arXiv:1710.10903.
Vesselinova, N., Steinert, R., Perez-Ramirez, D. F., and Bo-
man, M. (2020). Learning combinatorial optimization
on graphs: A survey with applications to networking.
IEEE Access, 8:120388–120416.
Wang, Y., Gurney, N., Zhou, J., Pynadath, D. V., and
Ustun, V. (2023). Route optimization in service
of a search and rescue artificial social intelligence
agent. In Computational Theory of Mind for Human-
Machine Teams: First International Symposium, ToM
Assessing Routing Decisions of Search and Rescue Teams in Service of an Artificial Social Intelligence Agent
319

for Teams 2021, Virtual Event, November 4–6, 2021,
Revised Selected Papers, pages 220–228. Springer.
Webber, S. S., Detjen, J., MacLean, T. L., and Thomas, D.
(2019). Team challenges: Is artificial intelligence the
solution? Business Horizons, 62(6):741–750.
Zhou, J., Cui, G., Hu, S., Zhang, Z., Yang, C., Liu, Z.,
Wang, L., Li, C., and Sun, M. (2020). Graph neu-
ral networks: A review of methods and applications.
AI Open, 1:57–81.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
320
