
BASE: Probably a Better Approach to Visual Multi-Object Tracking
Martin Vonheim Larsen
1,2,∗ a
, Sigmund Rolfsjord
1,2 b
, Daniel Gusland
1,2 c
, J
¨
orgen Ahlberg
3,2 d
and Kim Mathiassen
1,2 e
1
Norwegian Defence Research Establishment, Norway
2
University of Oslo, Norway
3
Link
¨
oping University, Norway
fi
Keywords:
Visual Multi-Object Tracking, Probabilistic Tracking, Distance-Aware, Association-Less Track Management.
Abstract:
The field of visual object tracking is dominated by methods that combine simple tracking algorithms and ad
hoc schemes. Probabilistic tracking algorithms, which are leading in other fields, are surprisingly absent from
the leaderboards. We found that accounting for distance in target kinematics, exploiting detector confidence
and modelling non-uniform clutter characteristics is critical for a probabilistic tracker to work in visual track-
ing. Previous probabilistic methods fail to address most or all these aspects, which we believe is why they fall
so far behind current state-of-the-art (SOTA) methods (there are no probabilistic trackers in the MOT17 top
100). To rekindle progress among probabilistic approaches, we propose a set of pragmatic models addressing
these challenges, and demonstrate how they can be incorporated into a probabilistic framework. We present
BASE (Bayesian Approximation Single-hypothesis Estimator), a simple, performant and easily extendible vi-
sual tracker, achieving state-of-the-art (SOTA) on MOT17 and MOT20, without using Re-Id.
Code available at https://github.com/ffi-no/paper-base-visapp-2024.
1 INTRODUCTION
INSTICC:Fx) Visual Multi-Object Tracking (VMOT)
is the task of estimating the location of objects over
time in a video sequence while maintaining a unique
ID for each target. Popular VMOT benchmarks (Leal-
Taix
´
e et al., 2015; Dendorfer et al., 2020; Sun et al.,
2022) are currently dominated by methods which
combine simple tracking algorithms with a stack of
ad hoc specializations to visual tracking (Zhang et al.,
2021; Du et al., 2022; Aharon et al., 2022; Yang et al.,
2023). These simple-yet-effective trackers cut corners
using hard logic, for instance by ignoring less-certain
detections, leaving performance on the table. Mean-
while, probabilistic trackers are ubiquitous in more
mature fields such as radar- and sonar tracking, as
they avoid most of these hard choices and can better
a
https://orcid.org/0000-0002-3008-7712
b
https://orcid.org/0009-0004-6118-8593
c
https://orcid.org/0009-0001-6351-8128
d
https://orcid.org/0000-0002-6763-5487
e
https://orcid.org/0000-0003-3747-5934
∗
This work was funded by The University Center at
Kjeller, and by projects 1505 and 1688 at the Norwegian
Defence Research Establishment.
exploit available information. This raises the ques-
tion: Why are probabilistic methods outperformed by
ad hoc approaches on VMOT? We believe the prob-
abilistic approaches have overlooked a few key as-
pects specific to VMOT in their adaptations of exist-
ing tracking theory.
In visual tracking, the perspective imaging results
in target kinematics and clutter (false detections) char-
acteristics that are radically different from those seen
in radar or sonar tracking. When representing tar-
get kinematics in image plane coordinates, we should
expect objects near the camera to appear more agile
than those we see from afar. Similarly, we should ex-
pect the density of new targets and clutter detections
to be much greater for distant objects, based on the
simple fact that objects take up less space in the im-
age when they are farther away. Accounting for these
non-uniform effects is necessary to succeed in proba-
bilistic visual tracking.
The dominating ad hoc trackers are built pragmat-
ically from the ground up for VMOT. One example
of this is the ubiquitous use of intersection-over-union
(IOU) as a similarity metric for detection-to-track
matching. Although chosen for its simplicity, the IOU
metric has a nice side-effect in that it gives more lee-
110
Larsen, M., Rolfsjord, S., Gusland, D., Ahlberg, J. and Mathiassen, K.
BASE: Probably a Better Approach to Visual Multi-Object Tracking.
DOI: 10.5220/0012386600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
110-121
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
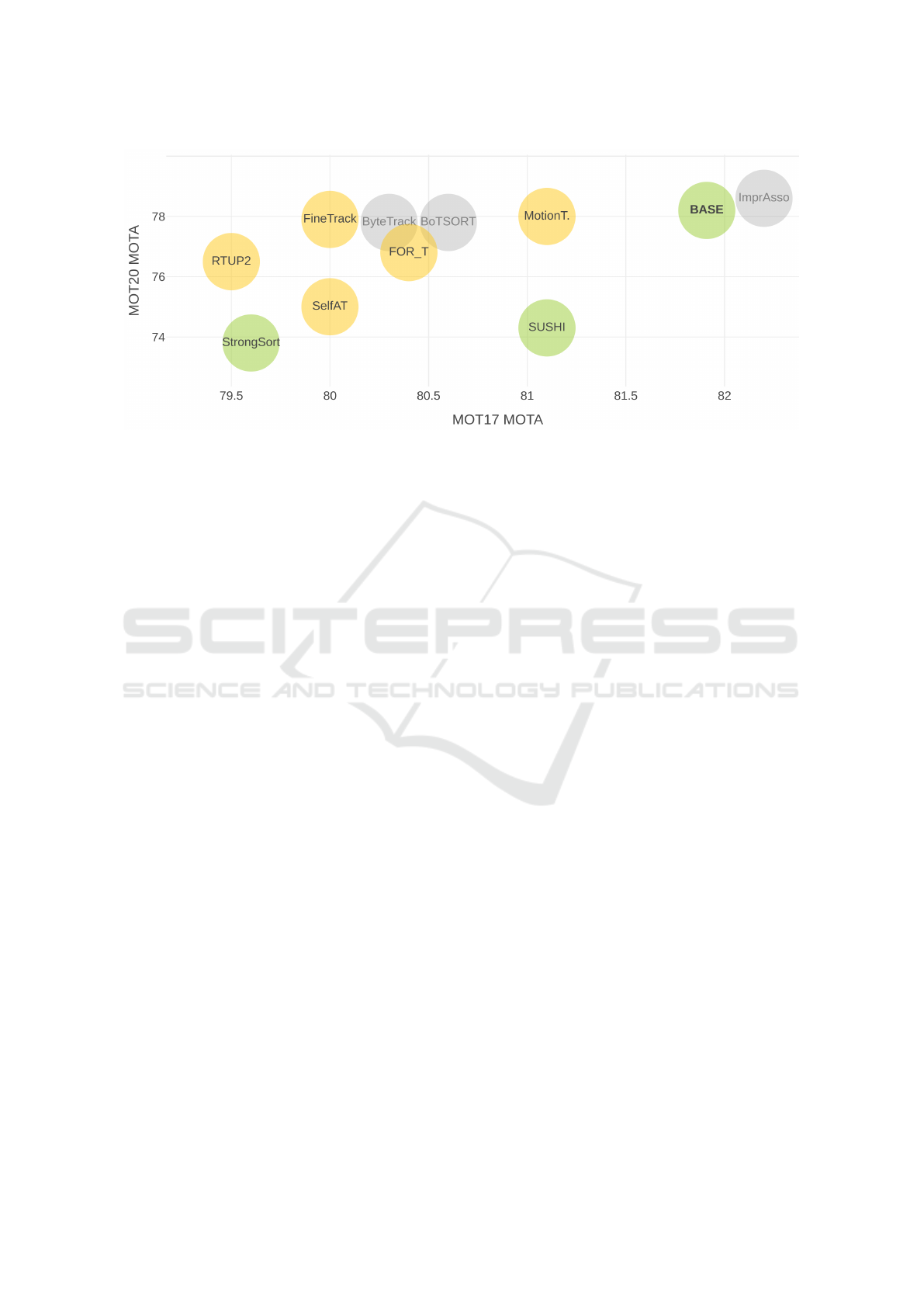
Figure 1: MOTA comparison of our proposed method BASE and top-performing trackers on the MOT17 and MOT20
benchmarks. Trackers in green use a fixed set of parameters across the test set, while those in grey tune parameters for each
test sequence. Yellow trackers do not report whether parameters are kept constant on the test set, and have not published code
reproducing the results.
way for larger bounding boxes than for smaller ones.
Leading approaches (Aharon et al., 2022; Yang et al.,
2023) also use object size to change model dynamics
when estimating target motion. Avoiding the draw-
backs of modeling distance explicitly, these pragmatic
mechanisms lead to target models that are distance-
aware, with good performance both for near and dis-
tant objects.
The advantage probabilistic trackers hold over ad
hoc methods lies in their ability to better balance dif-
ferent types of information. Which detection is likely
to originate from the current object? The one clos-
est in position, the one with the highest confidence, or
perhaps the one most similar in size or appearance?
Ad hoc methods either ignore parts of this informa-
tion, or resort to some arbitrary weighting between
them. Similarly, ad hoc methods typically accept tar-
gets once they have been detected a fixed number of
times, ignoring how consistent the detections were, or
what confidence level they had. A strong probabilistic
approach would instead model the relevant aspects of
this information, and take decisions based on what is
most likely.
Despite the more complex structure of probabilis-
tic trackers, we find that the leading approaches (Fu
et al., 2019; Song et al., 2019; Jinlong Yang et al.,
2022; Baisa, 2021b) omit, or fail, to model the as-
pects we see as critical to visual tracking. To lift prob-
abilistic trackers to the performance of the leading
ad hoc methods, we propose Bayesian Approxima-
tion Single-hypothesis Estimator (BASE), a minimal-
ist probabilistic take on visual tracking. As outlined
in Fig. 2, BASE replaces the key components of a tra-
ditional single-hypothesis tracker (SHT) with proba-
bilistic counterparts. The novelty of our approach is
accounting for the non-uniform kinematics and distri-
bution of clutter experienced in visual tracking, in a
unified probabilistic manner. Specifically, our main
contributions are:
• An efficient distance-aware motion model.
• Pragmatic modeling of new targets and clutter de-
tections, suited for VMOT.
• A new association-less probabilistic track man-
agement scheme, suited for crowded scenes.
• Methods for automatically estimating model pa-
rameters from training data.
Section 2 gives a brief review of related work, fol-
lowed by Sec. 3 which revisits the traditional single-
hypothesis tracking pipeline. Section 4 describes our
proposed method, BASE, and Sec. 5 details our ex-
periments performed on MOT17, MOT20 and Dance-
Track. Section 6 contains a summary and conclu-
sions.
2 RELATED WORK
Visual Multi-Object Tracking. The simple and
performant trackers that are currently state-of-the-
art (SOTA) are mostly based on or inspired by Sim-
ple Online and Realtime Tracking (SORT) (Bewley
et al., 2016). SORT (Bewley et al., 2016) started a
strong line of pragmatic trackers (Wojke et al., 2018;
Du et al., 2022; Zhang et al., 2021; Aharon et al.,
2022; Cao et al., 2022; Nasseri et al., 2022; Yang
et al., 2023; Stadler and Beyerer, 2022). These pub-
lications have a strong empirical focus, identifying
BASE: Probably a Better Approach to Visual Multi-Object Tracking
111
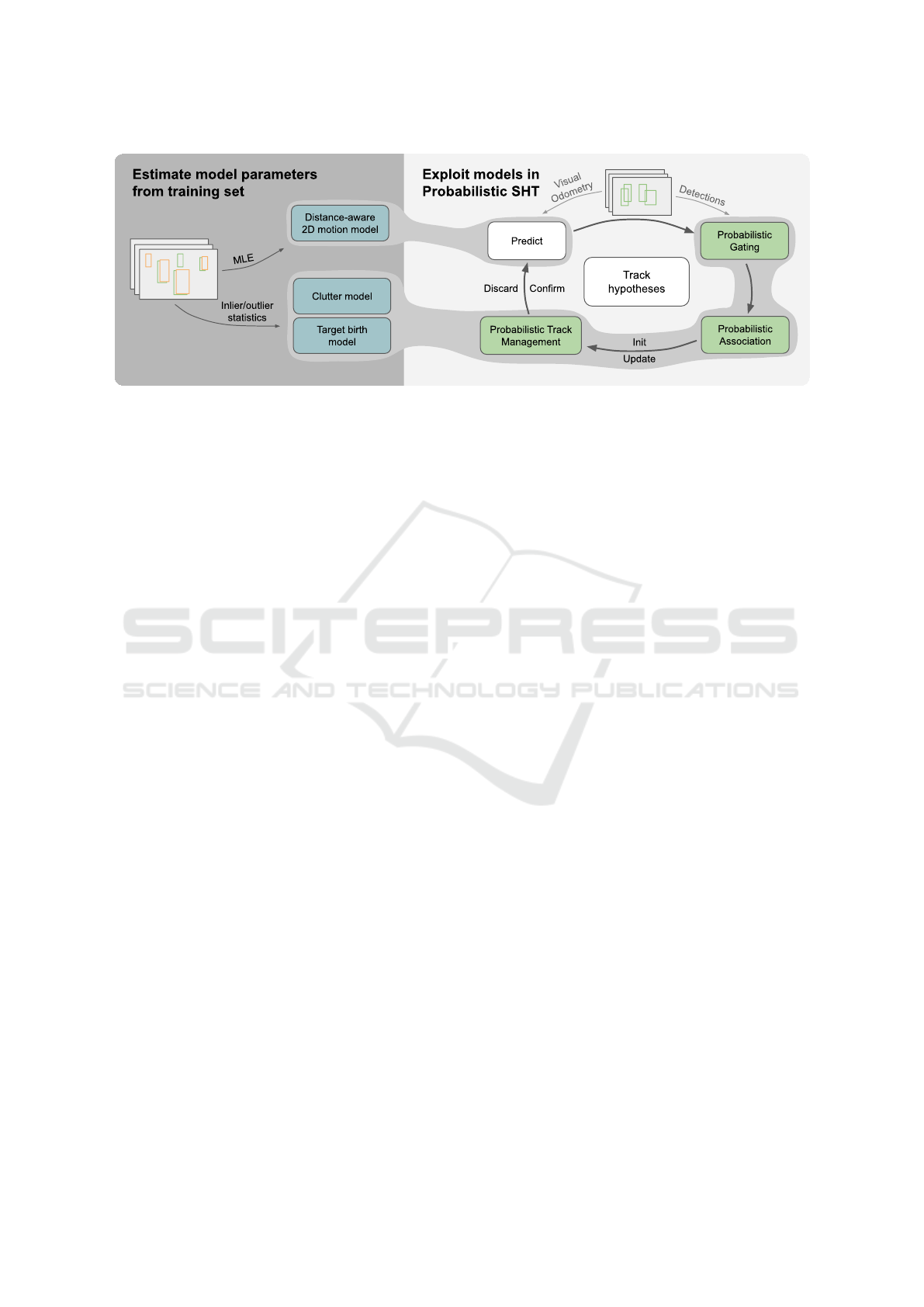
Figure 2: BASE builds on a traditional single-hypothesis tracker (SHT) architecture, but uses probabilistic formulations for
all aspects of gating, association and track management, as well as a distance-aware motion model. These probabilistic
formulations enable BASE to express nuances in detection confidence and detection-to-track match, which threshold-based
approaches lack. For a given usecase, BASE requires modeling the motion, clutter, and target birth characteristics of the
camera and detection algorithm used, which we can automatically fit using typical training datasets.
more or less standalone components that improve per-
formance. Based on their research, a set of core
components have emerged that are common among
strong visual trackers. Some of these components
are Global Nearest Neighbor (GNN) matching based
on IOU-related association metrics, Kalman filtering
for track prediction, two-stage track formation, ego-
motion compensation, post-interpolation of missed
segments, and most importantly, a strong detector.
End-to-End-Trackers: trackers are very attractive,
as they can be adapted to new applications without
architectural changes. They can also take advantage
of information in ways that are hard to express in
code. Although many end-to-end trackers exhibit im-
pressive results (Sun et al., 2020; Zhu et al., 2021;
Zeng et al., 2021; Yang et al., 2021; Sun et al.,
2020; Yan et al., 2022; Wang et al., 2020; Zhang
et al., 2023), they lag behind the best tracking-by-
detection methods on many VMOT benchmarks like
MOTChallenge. This is perhaps due to limited train-
ing data and difficulties in training motion models
with a short time horizon (Zhu et al., 2021). These is-
sues may be resolved in the future, but we still believe
there is room for other approaches, as data restrictions
will likely persist in many niche applications.
Probabilistic Visual Tracking. Many probabilistic
trackers in the MOTChallenges build on the ideas of
Bar-Shalom (Bar-Shalom and Tse, 1975; Bar-Shalom
et al., 2007) and Blackman (Blackman and Popoli,
1999). While they mostly rely on advanced state man-
agement schemes like MHT (Reid, 1979; Kim et al.,
2015) or PHD (Mahler and Martin, 2003), they of-
ten resort to non-probabilistic methods for associa-
tion and for combining different types of informa-
tion, such as appearance or shape. In fact, the most
successful probabilistic attempts fall back to non-
probabilistic association methods like IOU matching.
Meanwhile, approaches which rely solely on proba-
bilistic schemes (Baisa, 2021b), score slightly worse
than even the extremely simple IOUTracker (Bochin-
ski et al., 2017).
Surprisingly, most probabilistic approaches do not
leverage detector confidence beyond basic detection
thresholding (Sanchez-Matilla et al., 2016; Fu et al.,
2019; Jinlong Yang et al., 2022; Fu et al., 2018;
Aguilar et al., 2022; Baisa, 2021b). Some approaches
utilize confidence score for track initiation only (Song
et al., 2019; Baisa, 2021a; Baisa, 2019). Meanwhile,
Wojke et al. (Wojke and Paulus, 2017) demonstrated
a significant boost in performance by integrating de-
tector confidence into a PHD filter.
3 PROBABILISTIC
SINGLE-HYPOTHESIS
TRACKING (SHT) REVISITED
To bridge the gap between the highly specialized
ad hoc methods and the overly general probabilis-
tic trackers, the single-hypothesis tracker (SHT) is a
good starting point. It is arguably one of the simplest
tracking methods that can also be made to leverage
most of the key building blocks of probabilistic track-
ers.
Traditional SHT can be summarized as developing
a single set of track hypotheses through the following
steps for each new piece of sensor data:
1. Predict existing tracks to the current timestep.
2. Gate the detections by disregarding detection-to-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
112

track pairs that are considered too unlikely.
3. Associate detections to existing track hypotheses,
choosing the overall most likely set of matches.
4. Update the state estimate of existing tracks using
measurement data from the associated detections.
5. Manage Tracks by initializing new candi-
date tracks for unmatched detections, validating
promising tracks, and discarding unlikely tracks.
This structure is popular among the top-performing
visual trackers, which implement most (or all) these
steps using ad hoc modelling (Zhang et al., 2021;
Aharon et al., 2022; Du et al., 2022). Probabilistic
SHT aims to formulate gating, association and track
management in terms of probability. These formula-
tions often also require strict probabilistic modeling
of the underlying state (predict and update). Black-
man (Blackman and Popoli, 1999) gives an excellent
in-depth walkthrough of probabilistic SHT, but we
will here go through the most critical aspects.
3.1 Probabilistic Gating and
Association
The ad hoc trackers discussed in Sec. 2 typically
perform gating by thresholding the detection-to-track
IOU distance, and association by minimizing the
overall IOU distance. The benefit of formulating
these mechanisms in terms of probability is that it of-
fers a clear path to incorporate aspects such as the
quality of the track estimates, the detector perfor-
mance, and the clutter characteristics.
For a given true track state x
i
, we assume to have
an estimate
b
x
i
∼ N (x
i
, P
i
) and that corresponding de-
tections z
j
are generated as
z
j
= Hx
i
+ w
j
, w
j
∼ N (0, R
j
). (1)
Here, H is the measurement function, w
j
is white
measurement noise, and P
i
and R
j
are known covari-
ances. We can then consider the detection-to-track
innovation
b
y
i j
= z
j
− H
b
x
i
∼ N (0, S
i j
), (2)
with S
i j
= R
j
+ HP
i
H
⊤
.
For gating, an traditional approach (see (Black-
man and Popoli, 1999, Sec. 6.3.2) for details) is to
threshold the match-to-noise likelihood ratio:
N
b
y
i j
; 0,S
i j
λ
C
+ λ
NT
≥
1 − P
G
P
G
, (3)
where λ
NT
and λ
C
are the densities of new targets and
clutter, and P
G
is the desired gating confidence level.
For probabilistic association, we want to find the
“most likely” set of detection-to-track pairs A =
{( j,i)}. A common approach, which ignores the de-
tector performance and clutter characteristics, is to
formulate this as linear-sum assignment problem over
the negative logarithm of the innovation likelihood:
A
∗
= argmin
A
∑
( j,i)∈A
b
y
⊤
i j
S
−1
i j
b
y
i j
+ log |S
i j
| (4)
3.2 Probabilistic Track Management
Where ad-hoc trackers employ schemes such as
counting the number of recent detections to assess
whether a track hypothesis should be discarded, prob-
abilistic SHT estimates the probability that each hy-
pothesis is valid. This is done by assessing the event
H
i
: x
i
was either not detected, or explained by a
detection from a real target, in each frame.
For each track i we then maintain a likelihood-ratio
(LR) LR
i
, weighing evidence for- and against H
i
, as
LR
i
≜
p(Z
k
|H
i
)
p
Z
k
|H
i
·· ·
p(Z
1
|H
i
)
p
Z
1
|H
i
Pr
H
i
Pr
n
H
i
o
, (5)
where Z
k
represents the sensor data at time k, and H
i
is the logical complement of H
i
. At each timestep k,
depending on whether the track was detected or not,
Blackman writes the corresponding LR factor as
p(Z
k
|H
i
)
p
Z
k
|H
i
≜
P
D
p
(
b
y
i j
)
λ
C
p(z
S
|Det,H )
p
z
S
|Det,H
, if assoc. to j
1 − P
D
, otherwise.
(6)
Here, P
D
is prior detection probability, which is typ-
ically modelled as a constant. LR
S
=
p(z
S
|Det,H )
p
z
S
|Det,H
is
the “signal-related” LR, typically derived from the
SNR of the given detection method. We then con-
sider a track hypothesis x
i
to be “unconfirmed” until
LR
i
passes some given threshold, and discard the hy-
pothesis if LR
i
falls below some other threshold.
4 THE BASE VISUAL TRACKER
In this section, we present BASE, a minimalist prob-
abilistic take on visual tracking. We design BASE
as a probabilistic SHT with the necessary extensions
to sufficiently model the visual tracking problem, as
shown in Figure 2.
To accommodate the non-uniform motion and
clutter encountered in visual tracking, we develop
BASE: Probably a Better Approach to Visual Multi-Object Tracking
113

the distance-aware 2D motion model in Sec. 4.4 and
model detector performance and clutter behaviour in
Sec. 4.5. In Sec. 4.6 we propose an automatic proce-
dure to estimate the parameters of these models. The
traditional SHT pipeline discussed in Sec. 3 cannot
fully exploit these models in all aspects of gating, as-
sociation and track management. We therefore com-
pute the association probability in Sec. 4.1, before us-
ing it to reformulate gating and association in Sec. 4.2
and track management in Sec. 4.3.
4.1 Explicitly Approximating the
Association Probability
To account for non-uniform densities of new tar-
gets and clutter, the traditional association score from
Eq. (4) is insufficient. Consider a track which is pre-
sented with two measurements that have identical sta-
tistical distance, but where one measurement has far
greater risk of being clutter than the other. Intuitively,
we should prefer to associate the track with the mea-
surement least likely to be clutter.
Instead of using the traditional association score
from Eq. (4), we shall compute the full association
probability for each detection/track pair. First, we de-
fine the event
A
i j
: z
j
originates from the real target represented by x
i
.
In our single-hypothesis paradigm, each detection z
j
must originate either from a target for which we have
an hypothesis, a newly appeared target, or from clut-
ter. Given the corresponding measurement z
j
we use
λ
EX
(z
j
) = λ
NT
(z
j
) + λ
C
(z
j
) (7)
to denote the corresponding extraneous measurement
density. Modelling λ
NT
and λ
C
is detailed in Sec. 4.5.
We can now write the association probability as
Pr
A
i j
|
b
x
i
,z
j
=
p(
b
x
i
,z
j
|A
i j
)
λ
EX
(z
j
) +
∑
l
p(
b
x
l
,z
j
|A
i j
)
. (8)
Here, p (
b
x
i
,z
j
|A
i j
) is the joint likelihood of the cur-
rent track state
b
x
i
and the observed measurement z
j
,
assuming that z
j
originates from x
i
. Inspired by
(Blackman and Popoli, 1999) we model our measure-
ments to consist of a state-related measurement (mod-
elled in Sec. 4.4) and an independent confidence mea-
surement (modelled in Sec. 4.5). Since we will only
model the bounding box state of each track, we write
p(
b
x
i
,z
j
|A
i j
) ≜ p
b
x
(bb)
i
,z
(bb)
j
|A
i j
p
z
(c)
j
. (9)
4.2 Probabilistic Gating and
Association
Instead of using the traditional Eq. (3) for gating and
Eq. (4) for association scores, we will base both gat-
ing and scoring on Eq. (8). We compute association
scores as
−log Pr
A
i j
|
b
x
i
,z
j
(10)
and perform gating using
Pr
A
i j
|
b
x
i
,z
j
≥
1 − P
G
P
G
. (11)
The introduction of Eq. (8) results in stricter than
before gates both for measurements in crowded re-
gions and less confident measurements. For associa-
tion, however, Eq. (8) also takes the extraneous mea-
surement density into account, critical to properly bal-
ance between measurements that have vastly different
λ
EX
. Using Eq. (10), the linear-sum assignment will
now find the set of associations with the overall lowest
probability of containing a misassociation, whereas
the traditional variant (Eq. (4)) finds the most likely
association only with regards to the predicted state vs
the observed measurements.
4.3 Probabilistic Track Management
In BASE, we will build the track management around
the probability that at least one of the measurements
originates from a given track x
i
in the current frame,
namely
e
P
i
= 1 −
∏
j
1 − Pr
A
i j
|
b
x
i
,z
j
. (12)
To rewrite Eq. (5) using
e
P
i
, we first define the event
D
(k)
i
: x
i
was detected in frame k.
(13)
Re-ordering Eq. (5) with Bayes’ rule, we can write
the LR-contribution of frame k as
p(H
i
|Z
k
)
p
H
i
|Z
k
=
p
H
i
,D
(k)
i
|Z
k
+ p
H
i
,D
(k)
i
|Z
k
p
H
i
,D
(k)
i
|Z
k
+ p
H
i
,D
(k)
i
|Z
k
(14)
=
e
P
(k)
i
+ (1 − P
D
)
1 −
e
P
(k)
i
P
D
1 −
e
P
(k)
i
, (15)
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
114

where we have used that D
(k)
i
⊂ H
i
, and that
P
D
≜ Pr
n
D
(k)
i
|H
i
o
. (16)
Where the traditional LR update (Eq. (6)) only
uses the associated measurement, Eq. (15) collects
contributions from all measurements, normalized
across all tracks. This association-less track LR bet-
ter handles the cases where several tracks have signif-
icant stakes in a given measurement, which is often
the case in crowded visual tracking, as illustrated in
Fig. 3. Since this computation is well suited for GPU
acceleration and can be run in parallel with the asso-
ciation, the increased computational burden is more
than made up for in practice.
4.4 A Distance-Aware Planar Motion
Model for Bounding-Box Objects
We shall stick to a traditional linear Kalman filter
(KF) setup to model measurements and target mo-
tion. For each target, we model the bounding box
center, width and height in the current image plane
using pixel coordinates. We assume a nearly constant
velocity (NCV) model for the bounding box center
c
x
,c
y
, and use a nearly constant state model for the
box size. As a state vector we choose
x =
c
x
, c
y
, ˙c
x
, ˙c
y
, w, h
, (17)
where ˙c
x
, ˙c
y
denote the center velocity, and w and h
is the width and height. We model each NCV block
using
F
cv
=
1 δ
t
0 1
,Q
cv
=
δ
3
t
/3 δ
2
t
/2
δ
2
t
/2 δ
t
, (18)
for a given timestep δ
t
, as in (Blackman and Popoli,
1999, Sec. 4.2.2). We use F
∗2
cv
and Q
∗2
cv
to denote the
2D composition of F
cv
and Q
cv
.
We correct for camera ego-motion by first align-
ing each new image to the previous one using (Evan-
gelidis and Psarakis, 2008). Between each pair of fol-
lowing images we obtain a transform which predicts
pixels in time as
p
k
= W
k
p
k−1
+ t
k
. (19)
By using the notation T
k
= diag (W
k
,W
k
,W
k
) and
F
k
= diag
F
∗2
cv
,I
2
, we can write the state transition
as
x
k
= T
k
(F
k
x
k−1
+ v
k
) + I
6×2
t
k
, (20)
with white v
k
∼ N (0, Q
k
), where
Q
k
= σ
⊤
k
diag
Q
∗2
cv
,I
2
σ
k
. (21)
The key to making the model distance-aware, is here
to scale σ
k
with the previous object width, w
k−1
, sim-
ilar to what is done in (Aharon et al., 2022):
σ
k
= w
k−1
σ
ca
, σ
ca
, σ
ca
, σ
ca
, σ
sr
, σ
sr
, (22)
where σ
ca
and σ
sr
are the standard deviation of the
center acceleration noise and the size rate noise, re-
spectively.
For the sensor model we assume that we make ob-
servations corrupted by white Gaussian noise as
z
k
= (x
k
)
c
x
c
y
wh
+ w
k
, w
k
∼ N (0, R
k
). (23)
The sensor and transition models together de-
scribe a linear Gaussian system, which is suitable for
estimation using a KF. When initializing new tracks,
we will in addition to the above employ
b
x
0
=
z, 0, 0
(24)
b
P
0
= diag(R, P
cr
) (25)
as a prior for the center rate, where R and P
cr
are the
to-be-estimated measurement- and initial center rate
covariances.
4.5 Modelling Detector Performance
In probabilistic tracking, the extraneous measurement
density (λ
EX
from Eq. (7)) and the detection confi-
dence (p
z
(c)
j
from Eq. (9)) are typically ignored or
treated as constants. However, these quantities de-
scribe critical aspects of the detector performance that
should affect the tracking. Properly modeling these
parameters can allow us to quickly establish track in
the simple cases, while still avoiding false tracks in
questionable cases.
We begin by modeling the detector confidence z
(c)
in Eq. (9) through histogram binning of inlier and all
detections on the training set (see Sec. 4.6 for details)
as
p
z
(c)
j
≜
hist
inlier
(c
j
,w
j
)
hist
all
(c
j
,w
j
)
, (26)
where w
j
is the measured width, and c
j
is the pre-
dicted confidence from the detector. Figure 5 shows
the resulting likelihood on MOT17, which is clearly
nonuniform.
Next, we shall model λ
EX
(z), which is the den-
sity of clutter measurements and measurements due to
newly appeared targets. Through experimentation, we
have found that object size alone is a good discrimi-
nator for λ
EX
. We therefore use scaled histogram bin-
ning over object width across all training set detec-
tions as a pragmatic model:
λ
EX
(z
j
) ≜ c
EX
hist
w
(w
j
), (27)
BASE: Probably a Better Approach to Visual Multi-Object Tracking
115

(a) Frame 118: Association-less. (b) Frame 118: Association-based.
(c) Frame 281: Association-less. (d) Frame 281: Association-based.
Figure 3: Our proposed association-less track management from Eq. (15) vs. traditional association-based track management
on “MOT20-07”. Select tracks are highlighted in color based on track-ID, while boxes of unrelated tracks are drawn in gray.
In crowded areas, the detector tends to generate clutter detections, which can lead to false tracks, as in Fig. 3b. Meanwhile,
detections of partially occluded objects tend to have low confidence, which can cause the tracker to require more frames
before a track is established, as in Fig. 3d. Our association-less track management enables the tracker to be conservative in
establishing tracks in crowded areas, and at the same time aggressive for solitary objects. Meanwhile, association-based track
management must more carefully balance the risk of false tracks and delayed track establishment.
where w
j
is the measured width and c
EX
is a constant
we estimate in Sec. 4.6. Figure 6 shows a log-plot
of hist
w
for MOT17, which is clearly skewed towards
smaller boxes.
4.6 Automatically Estimating Model
Parameters from Training Data
To start using the proposed motion and sensor model,
we need the parameters σ
ca
, σ
sr
, R and P
cr
. For-
tunately, these can be estimated from a dataset con-
sisting of detections and ground-truth tracks, such as
those provided in the MOTChallenges.
The ground truth bounding boxes are given as
g
(k)
i
= (c
x
,c
y
,w, h) for each true target x
i
in each frame
k where x
i
is present. We start with the prior center
rate covariance P
cr
, which can be estimated from the
ground truth tracks alone. To avoid potential errors in
the camera ego-motion correction tainting the ground
truth data, we only use sequences where the camera is
stationary. We then estimate P
cr
as
P
cr
=
1
n
g
−1
∑
i
(g
(k
2
)
i
−g
(k
1
)
i
)(g
(k
2
)
i
−g
(k
1
)
i
)
⊤
(t
(k
2
)
i
−t
(k
1
)
i
)
2
, (28)
where k
1
and k
2
index the frames where target i ap-
pears for the first and second time, t
(k
2
)
i
− t
(k
1
)
i
is the
time elapsed between said frames, and n
g
is the total
number of targets.
The detection bounding boxes are given as a set
z
j
= (
b
c
x
,
b
c
y
,
b
w,
b
h) ∈ Z for each frame. To leverage the
detections in parameter estimation, we first attempt to
associate detections z
j
to ground truth targets g
i
using
IOU. We only consider pairs where iou(z
j
,g
i
) > 0.7,
and match z
j
to g
i
if z
j
is the closest to g
i
and vice-
versa. We denote the resulting set of associations A =
z
j
l
,g
i
l
l
.
Using the associated detections and ground truth
targets, we once again use stationary sequences, and
estimate R as
R =
1
n
a
−1
∑
z
(k)
j
,g
(k)
i
∈A
k
(z
(k)
j
− g
(k)
i
)(z
(k)
j
− g
(k)
i
)
⊤
, (29)
where n
a
is the total number of associations.
The histograms over all detections as a function
of box width (hist
w
(w)) and as a function of both pre-
dicted confidence and box width (hist
all
(c,w)) can be
computed directly from the training set. We compute
inlier histogram (hist
all
(c,w)) using only the associ-
ated detections in A.
To estimate σ
ca
and σ
sr
we employ maximum
likelihood estimation (MLE) based on A and the pro-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
116
posed motion- and sensor models from Sec. 4.4, as
outlined in (Brekke, 2019). Finally, we find c
EX
by a
parameter search where we run the tracker on the full
training set.
5 EXPERIMENTS
To assess the effectiveness of our proposed minimal-
ist probabilistic visual trackerm, we evaluate BASE
on the MOT17 (Milan et al., 2016), MOT20 (Dendor-
fer et al., 2020) and DanceTrack (Sun et al., 2022)
benchmarks. Since we are primarily interested in
validating the probabilistic backbone, we opt not to
use Re-Id or other appearance features. We will fo-
cus on the MOTChallenge benchmarks, which are
ideal for demonstrating a minimal probabilistic visual
tracker as they contain single-camera footage with
simple ego-motion and no complex movement pat-
terns. The DanceTrack dataset contains much more
sudden movement of arms and legs, and would bene-
fit from a more specialized motion model.
5.1 MOTChallenge Caveats
Although the MOTChallenge benchmarks enable ob-
jective comparison of tracking algorithms, there are a
few noteworthy differences in practices that color the
results.
Not All Results Use Global Parameters. As dis-
cussed in (Cetintas et al., 2023), several submissions
boost performance by tuning separate parameter sets
for each sequence in the test set. Unless explicitly
stated or evident from published source code, we
cannot ascertain which practice is used for a given
method.
Post-Tracking Interpolation across frames where
objects are not observed, is ubiquitous among all
top-scoring methods on both MOT17 and MOT20.
Approaches that interpolate over a fixed number of
frames, still seem to consider themselves “online”.
The public Detection Leaderboard seems useful to
compare trackers on equal terms. However, all the top
submissions in this category still use image data to ex-
tract additional detections or Re-ID, greatly occluding
the results.
5.2 Detector
We use the YOLOX (Ge et al., 2021) detector with
a detection threshold of 0.1 for all benchmarks. For
DanceTrack we use the officially trained weights. For
MOT17 and MOT20 we trained the model in a sim-
ilar fashion as ByteTrack (Zhang et al., 2021), with
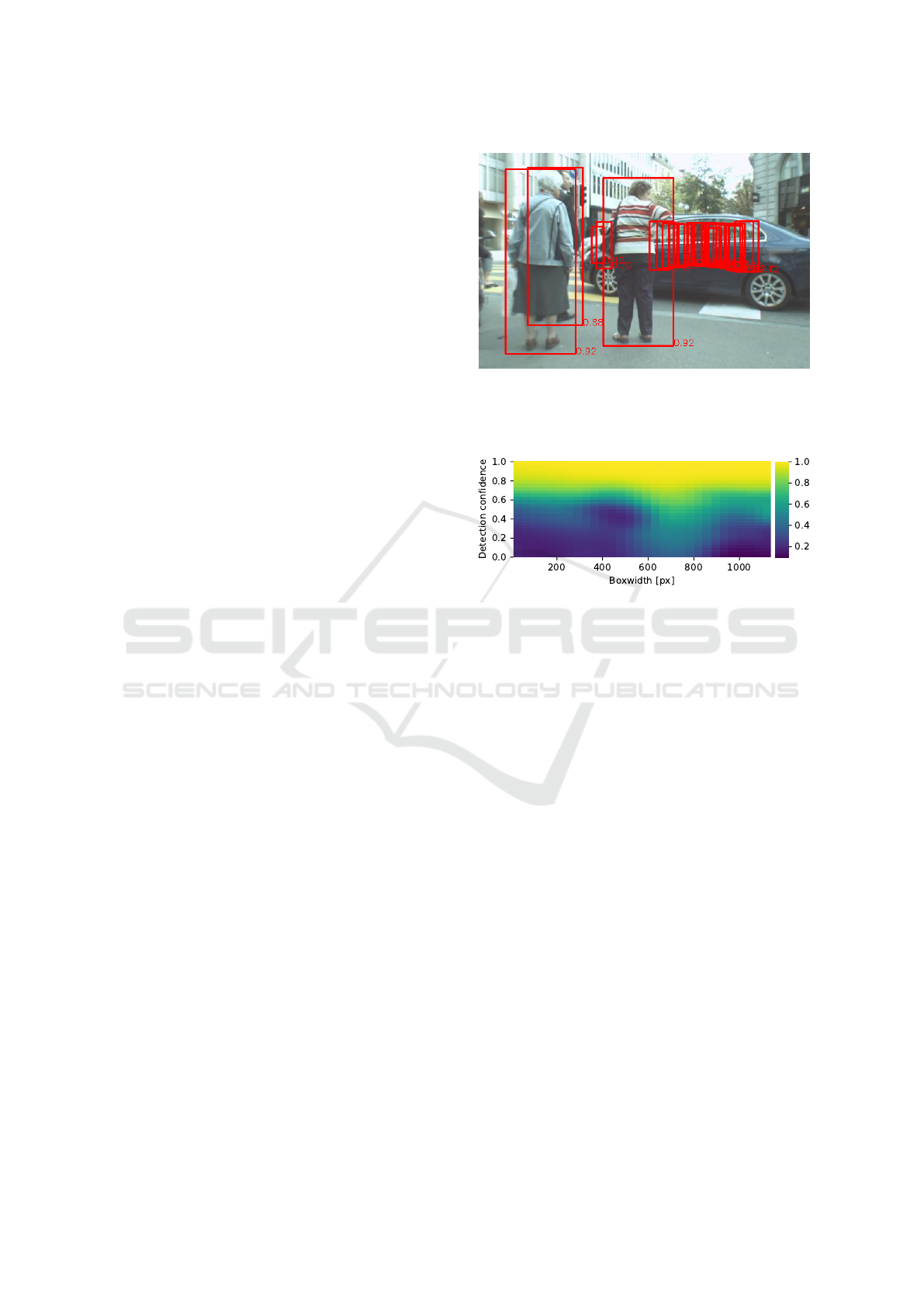
Figure 4: An image from “MOT17-05-FRCNN“ processed
using the pretrained detector from ByteTrack (Zhang et al.,
2021). This detector is overfitted to “see through” severe
occlusions, resulting in a large number of clutter detections.
Figure 5: The p
z
(c)
j
histogram from Eq. (26) for the
MOT17 training set. Each cell is the number of inlier de-
tections (as defined in Sec. 4.6) divided by the number of
detections within the corresponding boxwidth/score bin.
a combination of MOT17, Cityperson (Zhang et al.,
2017), Crowdhuman (Shao et al., 2018) and ETHZ
(Ess et al., 2008). However, as illustrated in Fig. 4, the
original ByteTrack detector has been severely overfit-
ted to propose detections even for occluded objects.
We therefore excluded fully occluded and crowd tar-
gets in the training process to avoid this type of over-
fitting.
5.3 Parameter Estimation
For each of the three benchmarks we select a global
set of parameters that are used across all sequences.
Following the scheme outlined in Secs. 4.5 and 4.6
we compute P
cr
, R, p
z
(c)
and histograms. σ
ca
and
σ
sr
are estimated using MLE on inlier detections, and
c
EX
is found by a parameter search using full tracking
on the respective training sets.
For all benchmarks we use P
D
= 0.95. MOT17
and MOT20 use a canonical P
G
= 10
−3
. DanceTrack
has very few distracting elements, and we have seen
improved performance using P
G
= 10
−6
.
BASE: Probably a Better Approach to Visual Multi-Object Tracking
117
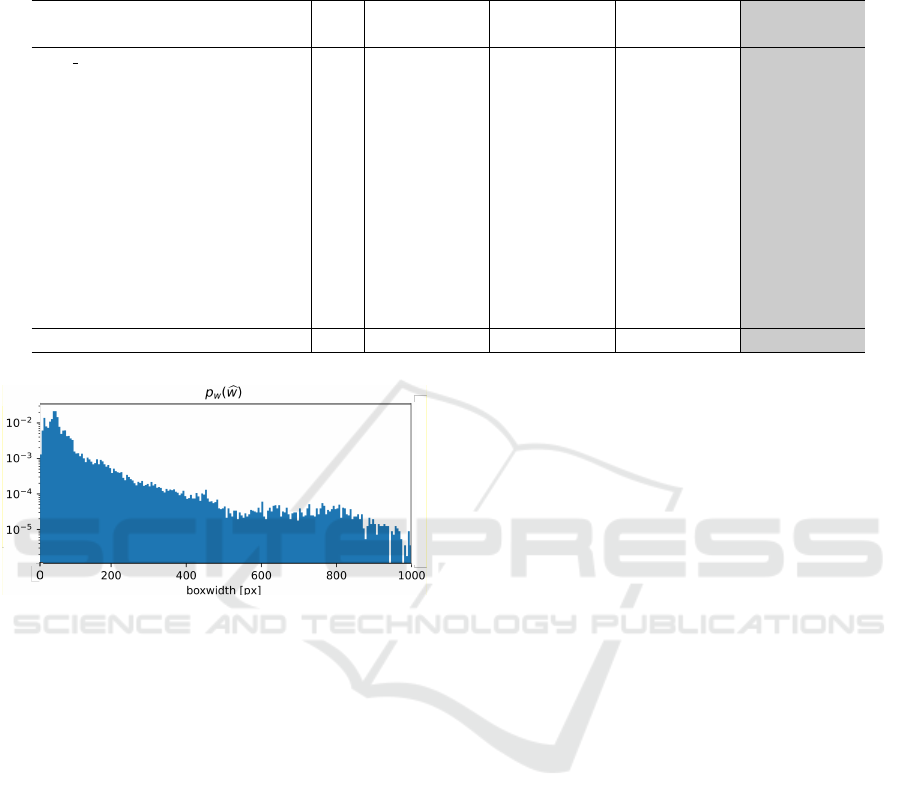
Table 1: SOTA and select methods on key benchmarks, sorted by MOT17 MOTA. The column with grey background shows
top results using strictly public detections on MOT17. Results which tune parameters for each sequence in the test set are
shown in grey font.
MOT17 MOT20 Dancetrack MOT17 Public
Method ReID MOTA HOTA MOTA HOTA MOTA HOTA MOTA HOTA
PHD GM (Sanchez-Matilla et al., 2020) - - - - - - - 48.8 -
GMPHDO. (Song et al., 2019) - - - - - - - 49.9 -
OCSORT (Cao et al., 2022) - 78.0 63.2 75.7 62.4 92.0 55.7 - -
MOTRv2 (Zhang et al., 2023) ✓ 78.6 62.0 76.2 60.3 92.1 73.4 - -
StrongSort (Du et al., 2022) ✓ 79.6 64.4 73.8 62.6 - - - -
FineTrack (Ren et al., 2023) ✓ 80.0 64.3 77.9 63.6 89.9 52.7 - -
ByteTrack (Zhang et al., 2021) - 80.3 63.1 77.8 61.3 90.9 51.9 - -
BoT-SORT (Aharon et al., 2022) ✓ 80.5 65.0 77.8 63.3 - - - -
SUSHI (Cetintas et al., 2023) ✓ 81.1 66.5 74.3 64.3 88.7 63.3 - -
MotionTrack (Qin et al., 2023) ✓ 81.1 65.1 78.0 62.8 - - - -
CBIoU (Yang et al., 2023) ✓ 81.1 64.1 - - 91.6 60.6 - -
ImprAsso (Stadler and Beyerer, 2023) ✓ 82.2 66.4 78.6 64.6 - - - -
BASE (ours) - 81.9 64.5 78.2 63.5 91.7 56.4 51.8 43.6
Figure 6: The hist
w
(w
j
) histogram from Eq. (27) for the
MOT17 training set. Each cell is just the density of detec-
tions within the corresponding boxwidth bin.
5.4 Post-Processing
The MOTChallenge ground truth used for scoring
contains both visible and occluded targets, which
makes it important to maintain tracks through occlu-
sions. True real-time trackers will always have a dis-
advantage in this regard, as they cannot correct al-
ready reported trajectories when old targets reappear.
To counter this, it has become a common practice
among the top performing tracker to apply interpo-
lation across such occlusion gaps in a post-processing
step. With this post-processing the tracker can still
run live, but will have some fixed delay.
We employ the interpolation post-processing as
described in (Zhang et al., 2021), in addition to what
we call look-ahead. With look-ahead we delay re-
porting of tracks by a fixed number of frames, but
use the estimated track hypothesis likelihood of the
newest processed frame to determine whether the
track should be reported. The primary benefit of this
is that we can report tracks with certainty upon first
detection, even though the track hypothesis likelihood
requires a few frames to accumulate. Without look-
ahead, the metrics used in the MOTChallenges force
the tracker to establish tracks on the very first detec-
tions, severely limiting the ability of the probabilistic
track management to filter clutter.
5.5 MOT17 Results
Our overall results for MOT17 are presented in Fig. 1
and Tab. 1. On the testset, BASE (excl. the detector)
ran at 331Hz on an AMD 5950x. Among all sub-
missions with publications and which use global pa-
rameters, BASE ranks first with an 81.9 MOTA score
and third with a 64.5 HOTA score. In MOTA, BASE
is only surpassed by ImprAsso (Stadler and Beyerer,
2023), which transparently report using per-sequence
tuning on the test set. We strongly suspect that BASE
would receive a significant performance boost using a
similar tuning scheme, but we insist on using global
parameters. Compared to leading trackers, like BoT-
SORT (Aharon et al., 2022), BASE performs exceed-
ingly well on sequences with small objects and per-
sistent clutter detections, like sequence 01 (72.4 vs
63.4 MOTA) and 14 (68.1 vs 53.5 MOTA). We be-
lieve this owes to BASE’s probabilistic track manage-
ment, which better captures the nuance between faint
detections of small objects and more inconsistent clut-
ter detections.
Compared to BoT-SORT, BASE performs worse
on sequences with long occlusions paired with large
camera motion, like sequence 06 (64.8 vs 66.6
MOTA). We suspect this is due to our lack of Re-ID,
as other motion-only approaches, such as ByteTrack
and OC-SORT, also perform poorly on this sequence
(60.2 and 57.3 MOTA).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
118

Table 2: Ablation results on the MOT17 validation set. The experiments quantify the effects of our proposed dynamic clutter
density model, the distance-aware motion model, the probabilistic association and the use of detector confidence.
Dynamic clutter Distance-aware Association type Detection confidence MOTA HOTA
1 - ✓ Probabilistic - 69.3 65.7
2 - - Probabilistic - 71.7 65.7
3 - - IOU - 73.7 65.4
3 ✓ - Probabilistic - 75.6 66.4
4 ✓ - IOU - 76.0 66.1
5 ✓ ✓ IOU - 76.5 66.2
6 ✓ ✓ Probabilistic - 77.1 68.2
BoT-SORT (Aharon et al., 2022) 78.5 69.2
7 ✓ ✓ Probabilistic Raw 80.8 69.8
8 ✓ ✓ Probabilistic Calibrated 81.6 70.2
The gray section of Tab. 1 reports results strictly
using only the public detections of MOT17. Here,
BASE outperforms vastly more complicated and
computationally costly probabilistic trackers, even
without visual odometry (VO).
5.6 MOT20 Results
The results for MOT20 are also shown in Fig. 1
and Tab. 1. Among submissions with publications
and which use global parameters, BASE ranks first
in MOTA, and third in HOTA. This is somewhat sur-
prising, given that several of the other top methods
employ Re-Id, which seems particularly promising on
MOT20. The high HOTA-score might indicate that an
empirically tuned motion model helps prevent mixing
up targets during occlusions. On the testset, BASE
(excl. the detector) ran at 39Hz on an AMD 5950x.
Several of the top-performing trackers employ
per-sequence parameters, which seems to be partic-
ularly beneficial on MOT20. Sequences 04 and 07,
the scenes of which are also featured in the training
set, seem to warrant conservative tracker parameters.
Meanwhile, sequences 06 and 08 seem to benefit from
a more sensitive tracker.
5.7 DanceTrack
DanceTrack (Sun et al., 2022) is an interesting dataset
as it poses quite different challenges than MOT17 and
MOT20, with highly irregular motion but often rela-
tively easily detectable targets. Since BASE’s motion
model assumes continuous motion and slow changes,
the sudden streching of arms and changes in posture
typical for this dataset seems particularly ill-suited
for our model. Table 1 shows our results, as well
as the SOTA methods also using the public detec-
tor. Our method outperforms ByteTrack(Zhang et al.,
2021) and FineTrack(Ren et al., 2023) but falls behind
C-BIoU, which leverages a more specialized motion
model. OCSORT(Cao et al., 2022), which also uses a
motion model adapted to DanceTrack, performs sim-
ilarly to BASE. MOTRv2(Zhang et al., 2023) outper-
forms all these approaches by a large margin, illus-
trating that an end-to-end approach may be a particu-
larly good fit for DanceTrack. However, as they use
additional training data, the MOTRv2 results are not
directly comparable to the other methods.
5.8 Ablation Study
In this section, we study the effects of the key compo-
nents of BASE, namely the probabilistic association
(vs IOU-based association), the distance-aware mo-
tion model (vs naive motion model), dynamic clut-
ter estimation (vs constant λ
EX
) and the histogram-
calibrated detector confidence (vs ignoring or using
raw confidence). We use the same YOLOX abla-
tion model from (Zhang et al., 2021), so the abla-
tion results are directly comparable to those of BoT-
SORT (Aharon et al., 2022) and ByteTrack (Zhang
et al., 2021). The model was trained on Crowdhuman
(Shao et al., 2018) and the train half of the MOT17
training set. We fit all BASE-specific parameters us-
ing only train from MOT17, while the experiments
were run on the val half of the training set. The re-
sults are shown in Tab. 2.
Comparing rows 1 and 2, we see that when using
a constant λ
EX
instead of dynamic clutter (Eq. (27)),
the distance-aware motion model actually makes the
method perform worse. Meanwhile, comparing rows
3 and 6, we see that the distance-aware motion model
gives a significant boost once the dynamic clutter
model is in place. Since the distance-aware motion
model increases the position uncertainty for tracks
with large bounding boxes, such tracks struggle to
build confidence and match with detections when the
clutter density is kept constant.
We also see that probabilistic association with a
naive motion model (row 3) is outperformed by IOU-
based association (row 4). The IOU-based association
intrinsically offers some compensation for distance,
since larger boxes are allowed to miss by more pixels
while still achieving the same IOU as smaller boxes.
BASE: Probably a Better Approach to Visual Multi-Object Tracking
119

The poor result with the naive motion model (row
3) indicates that having some distance-aware mech-
anism is indeed necessary in visual tracking. Mean-
while, we also see that our proposed distance-aware
motion model with probabilistic association (row 6)
performs even better, indicating that BASE is able to
further exploit the distance information.
We observe a significant improvement in perfor-
mance when calibrated confidence is used (row 8)
compared to raw confidence (row 7). Ignoring the
confidence score altogether (row 6) results in worse
performance than BoT-SORT. A possible explanation
for this is that the BoT-SORT dual threshold approach
can extract some, but not all, of the confidence score
information. Since all proposed components are nec-
essary to reach SOTA in the probabilistic paradigm,
we consider BASE as a minimalist approach.
6 CONCLUSION
This paper demonstrates that a probabilistic tracker
can achieve SOTA on popular VMOT benchmarks.
Our proposed method, BASE, is the top-performing
method on the MOT17 and MOT20 benchmarks
and has competitive results on the more specialized
DanceTrack benchmark. Through our ablation study,
we show that a distance-aware motion model is nec-
essary for probabilistic association to perform well in
visual tracking, and that a dynamic clutter model is
needed to make such motion models work. Previous
attempts at probabilistic visual trackers omit (at least)
the distance compensation, which we believe is why
they fall behind more ad-hoc visual trackers that em-
ploy IOU-based association.
With BASE, we are merely scratching the surface
of what is possible with probabilistic approaches to
visual tracking. Starting from a minimalist proba-
bilistic SHT foundation, we show that properly mod-
eling motion, clutter, and detector confidence is all
it takes for a probabilistic tracker to surpass the cur-
rent SOTA. The probabilistic framework opens the
gate for advanced core tracking algorithms and opti-
mally exploiting multiple object features, such as vi-
sual appearance/Re-ID. Therefore, BASE is probably
a better starting point for new visual trackers.
REFERENCES
Aguilar, C., Ortner, M., and Zerubia, J. (2022). Small Ob-
ject Detection and Tracking in Satellite Videos With
Motion Informed-CNN and GM-PHD Filter. Fron-
tiers in Signal Processing, 2(April):1–15.
Aharon, N., Orfaig, R., and Bobrovsky, B.-Z. (2022). BoT-
SORT: Robust Associations Multi-Pedestrian Track-
ing. arXiv preprint arXiv:2206.14651.
Baisa, N. L. (2019). Online Multi-object Visual Tracking
using a GM-PHD Filter with Deep Appearance Learn-
ing. FUSION 2019 - 22nd International Conference
on Information Fusion.
Baisa, N. L. (2021a). Occlusion-robust online multi-object
visual tracking using a GM-PHD filter with CNN-
based re-identification. Journal of Visual Communica-
tion and Image Representation, 80(January):103279.
Baisa, N. L. (2021b). Robust online multi-target visual
tracking using a HISP filter with discriminative deep
appearance learning. Journal of Visual Communica-
tion and Image Representation, 77.
Bar-Shalom, Y., Blackman, S. S., and Fitzgerald, R. J.
(2007). Dimensionless score function for multiple hy-
pothesis tracking. IEEE Transactions on Aerospace
and Electronic Systems, 43(1):392–400.
Bar-Shalom, Y. and Tse, E. (1975). Tracking in a cluttered
environment with probabilistic data association. Au-
tomatica, 11(5).
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple Online and Realtime Tracking. IEEE
international conference on image processing (ICIP).
Blackman, S. S. and Popoli, R. (1999). Design and analy-
sis of modern tracking systems, volume 1999. Artech
House Publishers.
Bochinski, E., Eiselein, V., and Sikora, T. (2017). High-
Speed tracking-by-detection without using image in-
formation. In 2017 14th IEEE International Confer-
ence on Advanced Video and Signal Based Surveil-
lance, AVSS 2017.
Brekke, E. F. (2019). Fundamentals of Sensor Fusion: Tar-
get tracking, Navigation and SLAM. NTNU.
Cao, J., Weng, X., Khirodkar, R., Pang, J., and Ki-
tani, K. (2022). Observation-Centric SORT: Rethink-
ing SORT for Robust Multi-Object Tracking. arXiv
preprint arXiv:2203.14360.
Cetintas, O., Bras
´
o, G., and Leal-Taix
´
e, L. (2023). Unify-
ing Short and Long-Term Tracking With Graph Hier-
archies.
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cre-
mers, D., Reid, I., Roth, S., Schindler, K., and Leal-
Taix
´
e, L. (2020). MOT20: A benchmark for multi
object tracking in crowded scenes. arXiv preprint
arXiv:2003.09003.
Du, Y., Song, Y., Yang, B., and Zhao, Y. (2022). Strong-
SORT: Make DeepSORT Great Again. arXiv.
Ess, A., Leibe, B., Schindler, K., and Van Gool, L. (2008).
A mobile vision system for robust multi-person track-
ing. 26th IEEE Conference on Computer Vision and
Pattern Recognition, CVPR.
Evangelidis, G. and Psarakis, E. (2008). Parametric Image
Alignment Using Enhanced Correlation Coefficient
Maximization. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 30(10):1858–1865.
Fu, Z., Angelini, F., Chambers, J., and Naqvi, S. M. (2019).
Multi-Level Cooperative Fusion of GM-PHD Filters
for Online Multiple Human Tracking. IEEE Transac-
tions on Multimedia, 21(9):2277–2291.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
120

Fu, Z., Feng, P., Angelini, F., Chambers, J., and Naqvi,
S. M. (2018). Particle PHD Filter Based Multiple Hu-
man Tracking Using Online Group-Structured Dictio-
nary Learning. IEEE Access, 6.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
YOLOX: Exceeding YOLO Series in 2021. arXiv.
Jinlong Yang, Peng Ni, Jiani Miao, and Hongwei Ge (2022).
Improving visual multi-object tracking algorithm via
integrating GM-PHD and correlation filters.
Kim, C., Li, F., Ciptadi, A., and Rehg, J. M. (2015). Multi-
ple Hypothesis Tracking Revisited. In 2015 IEEE In-
ternational Conference on Computer Vision (ICCV),
pages 4696–4704. IEEE.
Leal-Taix
´
e, L., Milan, A., Reid, I., Roth, S., and Schindler,
K. (2015). MOTChallenge 2015: Towards a Bench-
mark for Multi-Target Tracking. arXiv.
Mahler, R. P. S. and Martin, L. (2003). Multitar-
get Bayes Filtering via First-Order Multitarget Mo-
ments. IEEE TRANSACTIONS ON AEROSPACE
AND ELECTRONIC SYSTEMS, 39(4).
Milan, A., Leal-Taixe, L., Reid, I., Roth, S., and Schindler,
K. (2016). MOT16: A Benchmark for Multi-Object
Tracking. arXiv.
Nasseri, M. H., Babaee, M., Moradi, H., and Hosseini, R.
(2022). Fast Online and Relational Tracking. arXiv.
Qin, Z., Zhou, S., Wang, L., Duan, J., Hua, G., and Tang,
W. (2023). MotionTrack: Learning Robust Short-term
and Long-term Motions for Multi-Object Tracking. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 17939–
17948.
Reid, D. B. (1979). An Algorithm for Tracking Multiple
Targets. IEEE Transactions on Automatic Control,
24(6):843–854.
Ren, H., Han, S., Ding, H., Zhang, Z., Wang, H., and
Wang, F. (2023). Focus On Details: Online Multi-
object Tracking with Diverse Fine-grained Represen-
tation. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
11289–11298.
Sanchez-Matilla, R., Cavallaro, A., and N, N. (2020). Mo-
tion Prediction for First-Person Vision Multi-object
Tracking. In Lecture Notes in Computer Science (in-
cluding subseries Lecture Notes in Artificial Intelli-
gence and Lecture Notes in Bioinformatics), volume
12538 LNCS, pages 485–499. Springer Science and
Business Media Deutschland GmbH.
Sanchez-Matilla, R., Poiesi, F., and Cavallaro, A. (2016).
Online multi-target tracking with strong and weak de-
tections. Lecture Notes in Computer Science (in-
cluding subseries Lecture Notes in Artificial Intel-
ligence and Lecture Notes in Bioinformatics), 9914
LNCS:84–99.
Shao, S., Zhao, Z., Li, B., Xiao, T., Yu, G., Zhang, X., and
Sun, J. (2018). CrowdHuman: A Benchmark for De-
tecting Human in a Crowd. arXiv, pages 1–9.
Song, Y.-M., Yoon, K., Yoon, Y.-C., Yow, K. C., and Jeon,
M. (2019). Online Multi-Object Tracking With GM-
PHD Filter and Occlusion Group Management. IEEE
Access, 7:165103–165121.
Stadler, D. and Beyerer, J. (2022). Modelling Ambiguous
Assignments for Multi-Person Tracking in Crowds.
Proceedings - 2022 IEEE/CVF Winter Conference on
Applications of Computer Vision Workshops, WACVW
2022, pages 133–142.
Stadler, D. and Beyerer, J. (2023). An Improved Asso-
ciation Pipeline for Multi-Person Tracking. In 2023
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 3170–
3179. IEEE.
Sun, P., Cao, J., Jiang, Y., Yuan, Z., Bai, S., Kitani, K., and
Luo, P. (2022). DanceTrack: Multi-Object Tracking
in Uniform Appearance and Diverse Motion.
Sun, P., Cao, J., Jiang, Y., Zhang, R., Xie, E., Yuan, Z.,
Wang, C., and Luo, P. (2020). TransTrack: Multiple
Object Tracking with Transformer. arXiv.
Wang, Y., Kitani, K., and Weng, X. (2020). Joint Object De-
tection and Multi-Object Tracking with Graph Neural
Networks. arXiv.
Wojke, N., Bewley, A., and Paulus, D. (2018). Simple on-
line and realtime tracking with a deep association met-
ric. Proceedings - International Conference on Image
Processing, ICIP, 2017-Septe:3645–3649.
Wojke, N. and Paulus, D. (2017). Confidence-Aware prob-
ability hypothesis density filter for visual multi-object
tracking. VISIGRAPP 2017 - Proceedings of the 12th
International Joint Conference on Computer Vision,
Imaging and Computer Graphics Theory and Appli-
cations, 6(Visigrapp):132–139.
Yan, B., Jiang, Y., Sun, P., Wang, D., Yuan, Z., Luo, P., and
Lu, H. (2022). Towards Grand Unification of Object
Tracking. arXiv.
Yang, F., Chang, X., Sakti, S., Wu, Y., and Nakamura, S.
(2021). ReMOT: A model-agnostic refinement for
multiple object tracking. Image and Vision Comput-
ing, 106:104091.
Yang, F., Odashima, S., Masui, S., and Jiang Fujitsu Re-
search, S. (2023). Hard To Track Objects With Irregu-
lar Motions and Similar Appearances? Make It Easier
by Buffering the Matching Space. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision (WACV),, pages 4799–4808.
Zeng, F., Dong, B., Zhang, Y., Wang, T., Zhang, X., and
Wei, Y. (2021). MOTR: End-to-End Multiple-Object
Tracking with Transformer. arXiv.
Zhang, S., Benenson, R., and Schiele, B. (2017). CityPer-
sons: A diverse dataset for pedestrian detection. Pro-
ceedings - 30th IEEE Conference on Computer Vi-
sion and Pattern Recognition, CVPR 2017, 2017-
Janua:4457–4465.
Zhang, Y., Sun, P., Jiang, Y., Yu, D., Yuan, Z., Luo, P., Liu,
W., and Wang, X. (2021). ByteTrack: Multi-Object
Tracking by Associating Every Detection Box. ECCV
2022, Proceedings.
Zhang, Y., Wang, T., and Zhang, X. (2023). MOTRv2:
Bootstrapping End-to-End Multi-Object Tracking by
Pretrained Object Detectors. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 22056–22065.
Zhu, T., Hiller, M., Ehsanpour, M., Ma, R., Drummond, T.,
Reid, I., and Rezatofighi, H. (2021). Looking Beyond
Two Frames: End-to-End Multi-Object Tracking Us-
ing Spatial and Temporal Transformers. arXiv, pages
1–20.
BASE: Probably a Better Approach to Visual Multi-Object Tracking
121
