
Facial Expression-Based Drowsiness Detection System for Driver
Safety Using Deep Learning Techniques
Amina Turki
1a
, Sirine Ammar
2
, Mohamed Karray
3b
and Mohamed Ksantini
1c
1
Control & Energies Management Laboratory (CEM-Lab),
National Engineering School of Sfax, University of Sfax, Tunisia
2
National School of Electronics and Telecommunications of Sfax, University of Sfax, Tunisia
3
ESME Research Lab, Special School of Mechanics and Electricity (ESME), Ivry Sur Seine, France
Keywords: Driver Drowsiness Detection (DDD) System, Deep Neural Networks (DNNs), the Chebyshev Distance.
Abstract: Driver drowsiness is a leading cause of road accidents, resulting in severe physical injuries, fatalities, and
substantial economic losses. To address this issue, a sophisticated Driver Drowsiness Detection (DDD)
system is needed to alert the driver in case of abnormal behaviour and prevent potential catastrophes. The
proposed DDD system calculates the Eyes Closure Ratio (ECR) and Mouth Opening Ratio (MOR) using the
Chebyshev distance, instead of the classical Euclidean distance, to model the driver's behaviour and to detect
drowsiness states. This system uses simple camera and deep transfer learning techniques to detect the driver's
drowsiness state and then alert the driver in real time situations. The system achieves 96% for the VGG19
model, and 98% for the ResNet50 model, with a precision rate of 98% in assessing the driver's dynamics.
1 INTRODUCTION
Drowsiness, often underestimated, is a real danger
when related to driving. Driver’s fatigue and
sleepiness becomes a silent threat, contributing
significantly to the alarming statistics of road
accidents and fatalities. It is not possible to calculate
the exact number of sleep related accidents, but
research shows that driver fatigue may be a
contributory factor in up to 20% of road accidents,
and up to one quarter of fatal and serious accidents
(ROSPA, 2020). Indeed, the National Highway
Traffic Safety Administration (NHTSA, 2017)
reported that drowsy driving was involved in an
estimated 91,000 crashes, resulting in 795 deaths and
50,000 injuries in the United States in 2017. It is
therefore important to detect drowsiness early and
accurately.
Preventing drowsiness while driving is a
paramount concern, and the integration of Driver
Drowsiness Detection (DDD) systems emerges as a
crucial solution. These innovative systems represent
a
https://orcid.org/0000-0002-4314-3541
b
https://orcid.org/0000-0001-7293-8696
c
https://orcid.org/0000-0002-9928-8643
a proactive and effective approach to preventing the
dangers associated with drowsy driving. By
leveraging technology to monitor, alert, and respond
to signs of fatigue, these systems play a crucial role
in safeguarding lives on the road (Ramzan, 2019).
DDD systems can be broadly categorized into
several types, each utilizing various measures to
monitor and mitigate the risk of drowsy driving.
The most effective type of Driver Drowsiness
Detection (DDD) system depends on various factors,
including accuracy, real-time responsiveness, and
practical implementation. In practice, a combination
of technologies often proves to be the most effective
approach (Kamti, 2022). Drowsiness detection
systems (DDD) based on facial recognition are a
promising approach, especially when combined with
deep learning (DL) techniques (Aytekin, 2022), (Dua,
2021), (Ahmed, 2023), and (Yu, 2018).
This paper focuses on studying DDD systems
based on facial expressions. It proposes a hybrid
drowsiness detection system (DDD) that combines
eye closure ratio (ECR) and mouth opening ratio
(MOR) features extracted from car camera images of
726
Turki, A., Ammar, S., Karray, M. and Ksantini, M.
Facial Expression-Based Drowsiness Detection System for Driver Safety Using Deep Learning Techniques.
DOI: 10.5220/0012386000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 726-733
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

the driver's face using Machine learning (ML)
techniques. These features are then used to train
classifiers using Deep learning (DL) models to
distinguish between drowsy and non-drowsy drivers.
The system first detects the driver's facial
landmarks in a frame using image recognition. Then,
it calculates the ECR and MOR using the Chebyshev
distance, which has been shown to be more accurate
than other distance measures. The driver's drowsiness
state is then detected by the trained model based on
these values. Finally, an ensemble learning methods
were used to determine whether the driver is tired. So,
the paper is organized as follows: Section 2 discusses
concepts related to the proposed DDD system and
reviews related research studies. Section 3 introduces
the proposed approach, methodology, and materials.
Section 4 presents the experimental results and
discussions. Finally, section 5 concludes the paper.
2 RELATED WORK
In this work, we focus on the study of DDD systems
based on facial expressions measures.
2.1 Facial Expressions’ Behavioural
Measures for DDD Systems
The features of the driver’s physical behaviour
represent a good baseline to detect more efficiently
the driver’s drowsiness. There are many DDD
systems which are based on facial expressions. They
use many and diverse parameters and methods to
conceive their detection procedure.
2.1.1 Eyes’ Facial Expressions
The eye state is a relevant method for detecting driver
drowsiness (Wilkinson, 2013). Various features like
the eye-opening rate, eyelid distance, and PERCLOS
are considered top indicators of drowsiness
(Wilkinson, 2013). Khan et al. developed a real-time
Driver Drowsiness Detection (DDD) system that
utilized eyelid closure as a key indicator (Tayab
Khan, 2019). The system used surveillance videos to
monitor the driver's eyes and classified the eyelids as
open or closed based on the curvature of the eyelids.
Maior et al. created a sleepiness detection technique
using the eyes' movements, calculating the EAR
metric to determine whether the eye is open or closed
(Marior, 2020). Zandi et al. proposed the use of eye
tracking data as a non-intrusive measure for detecting
drowsiness, achieving an accuracy of 88.37% to
91.18% with the RF classifier (Zandi, 2019).
Hashemi et al. developed a real-time DDD system
based on eye closure using deep learning, achieving
an accuracy of 98.15% with the FD-NN model
(Hashemi, 2020).
2.1.2 Mouth’ Facial Expressions
In various studies, the real-time prediction of driver
drowsiness has been achieved by analyzing the state
of the driver's mouth. Alioua et al. utilized an SVM
and the Circular Hough Transform (CHT) to extract
features from mouth movements for their DDD
system, which proved effective in real-time scenarios
across different lighting conditions (Alioua, 2014).
The experiment's results indicated that yawning could
be detected with an accuracy rate of 81%. Similarly,
Xiaoxi et al. developed a DDD system based on
CNNs that utilized depth video sequences to detect
driver fatigue specifically during nighttime (Xiaoxi,
2017). By employing both spatial and temporal
CNNs, the system was able to locate objects and
calculate motion vectors, enabling the detection of
yawns even when the driver's mouth was covered.
The system demonstrated an accuracy of 91.57% in
their experiments.
2.1.3 Hybrid Facial Expressions: Eyes and
Mouth
In recent studies on Driver Drowsiness Detection
(DDD) systems, researchers have explored various
approaches to analyze driver behavior. Celecia et al.
proposed an economical and accurate DDD system
(Celecia, 2020). The system recorded images using a
camera with an infrared illuminator and employed a
Raspberry Pi 3 Model B for processing. Features from
the eyes and mouth were extracted using a cascade of
regression tree algorithms. These features were then
combined using a Mamdani fuzzy inference system to
predict the driver's drowsiness state. The system
achieved a high accuracy of 95.5% and remained
resilient to various ambient illumination conditions.
Alioua et al. presented a non-intrusive and
efficient method for detecting drowsiness (Alioua,
2011). Their approach involved analyzing closed
eyelid and open mouth states based on images
captured from a webcam. The system used an SVM
face detector to identify the face region in each image
and applied the Hough transform to locate the mouth
and eyes' regions. By assessing the openness of the
eye and calculating the mouth opening, the system
determined the driver's drowsiness with an accuracy
of 94% and an 86% kappa statistic value.
Facial Expression-Based Drowsiness Detection System for Driver Safety Using Deep Learning Techniques
727
2.2 Deep Learning for DDD Systems
DL is a significant research trend within the Machine
Learning (ML) community, known for its remarkable
success in various domains. DL networks possess the
ability to learn from vast amounts of data, enabling
exceptional performance in complex cognitive tasks.
Convolutional Neural Networks (CNNs) are a
prominent type of DL network. CNNs excel at
automatic pattern detection and feature extraction in
images, without requiring human guidance. This
capability has led to the widespread adoption of
CNNs, making them one of the most popular DL
networks architectures.
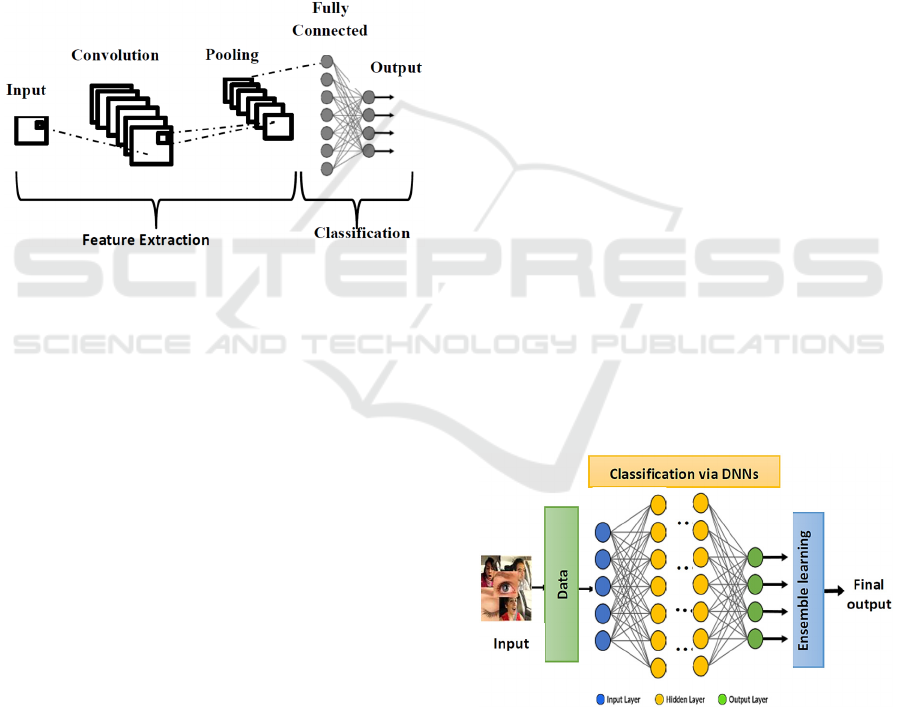
A CNN architecture is represented in Figure 1.
Figure 1: A CNN architecture.
There is a wide range of pre-trained models
available for deep learning tasks, such as Inception,
VGG family, and ResNet family. Transfer Learning
(TL) is a technique that utilizes pre-trained CNN
models to solve different tasks within a similar
domain (Transfer, 2021). TL saves both resources and
time, as it does not require extensive amounts of data
or starting the training process from scratch (Ho,
2021). The use of pre-trained structures improves
generalization even after fine-tuning to the specific
dataset (Kensert, 2019). Several studies have utilized
CNNs for drowsy driver detection. The study in
(Aytekin, 2022), used a VGG16 model that achieved
an accuracy of 91% and an F1-score of over 90% for
each class in determining if the driver's eyes are open
or closed and if they are yawning. Another study
suggested an architecture of four DL models that use
RGB videos of drivers as input. It had employed DL
models and ensemble processes to detect tiredness,
achieving accuracy rates of 85% the with a SoftMax
classifier in the output (Dua, 2021). Yu et al. (Yu,
2018) proposed a framework for the DDD based on
3D-deep CNN. The recognition of driver’s
drowsiness status was done using the condition
adaptive representation with an accuracy of 76,2 %.
3 PROPOSED APPROACH
3.1 Description
We present in this section a DDD system that utilizes
pretrained CNNs with TL techniques to detect driver
drowsiness in various driving scenarios. The
proposed approach offers several key contributions:
Introduction of a novel DL approach that
automatically detects and estimates driver
drowsiness using camera and deep TL methods.
Utilization of the Chebyshev distance to analyze
the state of the driver's eyes and mouth (open or
closed) based on facial landmarks, enabling
efficient drowsiness detection.
Implementation of data augmentation
techniques to magnify and enrich the dataset,
thereby enhancing the training process.
Classification of drowsiness states using two
pretrained CNN models, resulting in improved
performance of the DDD system.
Utilization of ensemble learning techniques to
combine the model outputs and generate the final
prediction, ensuring better recognition performance.
3.2 The Learning Procedure
The learning procedure consists of training two CNN
models; the VGG19 and the Res-Net50. These
models represent the most object identification
accuracies (Lee, 2021). They will be used later to
decide if the driver is drowsy or not for a real-time
detected drowsiness state. The overall procedure is
represented by Figure 2.
Figure 2: The learning procedure.
3.2.1 Dataset
The study used the YAWDD dataset (Shabnam,
2014), consisting of 2900 samples of facial features
of 322 male and female drivers’ videos that were
taken in real and varying illumination conditions with
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
728

different mouth conditions such as normal, talking,
singing, and yawning, as well as drivers wear glasses.
These samples are mainly used for models and
algorithms to classify driver drowsiness. The dataset
was divided into four categories: yawn, no-yawn,
open eye, and closed eye.
3.2.2 Data Augmentation
Data augmentation techniques are used to increase the
quantity of training data DNNs to perform complex
tasks with high accuracy. These techniques involve
artificially increasing the quantity of data by
producing new data points from available data. This
was achieved by making small alterations to image
data, such as geometric and color transformations, to
the original data.
3.2.3 Training
The study focuses on training two CNN models,
VGG19 and Res-Net50, to determine if a driver is
drowsy in real-time. The models were chosen for their
accuracies in object identification and their ability to
learn hierarchical representations of visual data. The
pre-trained layers of VGG19 and ResNet50 were
frozen to preserve their learning features. To adapt to
the specific drowsiness state classification task,
additional fully connected layers were added to learn
high-level features. The models were then compiled
for training using the Adam optimizer and sparse
categorical cross-entropy loss function. The training
process involved many iterations. The performance of
each model was evaluated on the validation set,
comparing predictions with ground truth labels to
measure their accuracy and effectiveness in
recognizing different drowsiness states.
3.2.4 Ensemble Learning
This research utilized ensemble learning, a widely
recognized and effective machine learning technique,
to improve classification performance in drowsiness
states. Three distinct ensemble methods were
implemented: Ensemble Averaging, Ensemble
Stacking, and AdaBoost Ensemble.
Ensemble Averaging combined predictions
from the VGG19 and ResNet50, to derive a final
prediction, improving recognition performance.
Each model contributed equally to the ensemble's
decision, leveraging their strengths and distinctive
capabilities.
Ensemble Stacking introduced a meta-model
designed to harness the predictive abilities of
individual models, concatenating predictions from
both models and feeding them into a densely
constructed meta-model. This meta-model aimed
to explore higher-order interactions between the
models, enhancing performance beyond what each
model could achieve independently.
In AdaBoost Ensemble, individual models
were used as base estimators. The meta-model
combined the output of these models through
weighted averaging, giving more weight to models
that performed well and less weight to those with
lower accuracy. This process not only enhanced
overall performance but also provided a
mechanism to adaptively focus on the strengths of
specific models.
3.3 The Detection Procedure
To detect driver drowsiness, a basic car camera is
installed on the vehicle's roof. The camera captures
live video and identifies the driver's face region.
Using the Dlib toolkit, the eyes and mouth landmarks
are determined. The coordinates of these landmarks
are then used to calculate the ECR and the MOR. By
analyzing these ratios, the system can identify if the
driver's eyes are closed or if they are yawning,
indicating a drowsy state.
3.3.1 Identification of Facial Landmarks
The Dlib library (Dlib, 2022) which is an open-source
library utilizing C++ language, is used to identify the
essential features of the driver's face in the driver
video frame by frame. This library provides a facial
landmark detector that estimates the positions of 68
face-specific coordinate points, including the eyes,
eyebrows, nose, ears, and mouth. The technique for
detecting these facial landmarks is based on machine
learning algorithms proposed by Viola and Jones
(Viola, 2001) and further improved by Kazemi et al.
(Kazemi, 2014). The Dlib package offers an efficient
solution for real-time facial features detection,
enabling accurate identification of the driver's facial
landmarks. This face landmarks detector identifies 68
main facial features positions, as shown in Figure 3.
Figure 3: The 68 facial landmark points of human face.
Facial Expression-Based Drowsiness Detection System for Driver Safety Using Deep Learning Techniques
729

We can detect and access specific facial structures
by using the facial landmark index, which identifies
sections of the face. Through this method, we can
easily extract information from the eye and mouth
regions: the right eye: (36, 42), the left eye:(42, 48),
and the mouth: (49, 68).
In our study, we utilized a set of 32 facial
landmarks, focusing on the left eye, right eye, and
mouth regions, to determine the level of eye closure
and mouth opening. We employed two distance
metrics, namely the Euclidean distance and the
Chebyshev distance, to calculate ECR and the MOR.
Our findings revealed that the Chebyshev distance
outperformed the Euclidean distance, making it the
preferred choice for our analysis.
The Chebyshev distance is particularly
advantageous in situations where implementation
speed is crucial, as it enables faster computation of
pixel distances. This distance metric is commonly
used in specialized applications where execution
speed is of utmost importance (Potolea, 2010).
D x,
y
max
|
x
y
|
(1)
The Chebyshev distance between two points or
two vectors with standard coordinates x
and y
is:
3.3.2 Eye Closure Ratio (ECR)
ECR is a scalar value that responds to the estimation
of the eye closure state. Each eye is represented by six
coordinates, as shown in Figure 4.
ECR value is calculated by using the following
equation:
ECR
max
|
p
p
|
max
|
p
p
|
2max
|
p
p
|
(2)
3.3.3 Mouth Opening Ratio (MOR):
Yawning is marked by mouth opening as shown in
Figure 5. A parameter used to determine whether
someone is yawning. Like ECR, MOR is defined as:
MOR
max
|
p
p
|
max
|
p
p
|
max
|
p
p
|
2max
|
p
p
|
(3)
Figure 4: The facial landmarks related to eyes (p
-p
).
Figure 5: Mouth yawning with facial landmarks (p
-p
).
3.3.4 Drowsiness Detection
To detect a drowsy driver, certain conditions need to
be met:
1) The driver is considered drowsy if the output
of the detector module exceeds a specified
drowsiness threshold, typically ranging from 0 to 1.
In our case, we have set the threshold at 0.3 after
conducting multiple tests.
2) Drowsiness is determined by the ECR, which
measures the duration of eye blinks. On average, a
blink lasts between 0.1 and 0.4 seconds. If the ECR
exceeds this range, indicating prolonged eye closure
for more than five seconds, the person is considered
drowsy.
3) Drowsiness is also identified by the MOR.
When the MOR reaches its maximum value, it
indicates yawning, a common sign of drowsiness.
4) If both condition 1 and condition 3 are met
simultaneously, with the output exceeding the
drowsiness threshold and the MOR indicating
yawning, the driver is deemed drowsy.
4 EXPERIMENTAL RESULTS
The DDD system is built based on two DNNs.
Furthermore, we tried to achieve the training using
the traditional CNN model. A performance
comparative analysis of the CNN model with these
DNNs models used in the learning module of the
DDD system has been performed.
Two DNN models were trained using the YawDD
dataset. The dataset was split, with 80% used for
training and 20% for testing. Both contain data from
the same persons. Data augmentation techniques were
applied to the training set. Geometric transformations
such as zooming, flipping, and rotation were used to
generate new data during the learning step. The
generated data was passed through the data
augmentation layer before reaching the convolution
layers of the DL model.
The trained models were developed in open-
source language Python using Collab API with all
sup-porting libraries related to computer vision and
deep-learning architectures as OpenCV, Keras, and
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
730
Tensorflow tools on a PC with the following
configuration: Intel® Core (TM) 10th generation
CPU, 8 Go of RAM, Winodws 10, 64 bits and a Web
Camera. The total epochs vary from 43 to 47
according to the model. The time processing is
therefore different for each model. It increases unless
the number of layer increases. However, on average,
the DDD system took 0.22 seconds to train a single
image for each model.
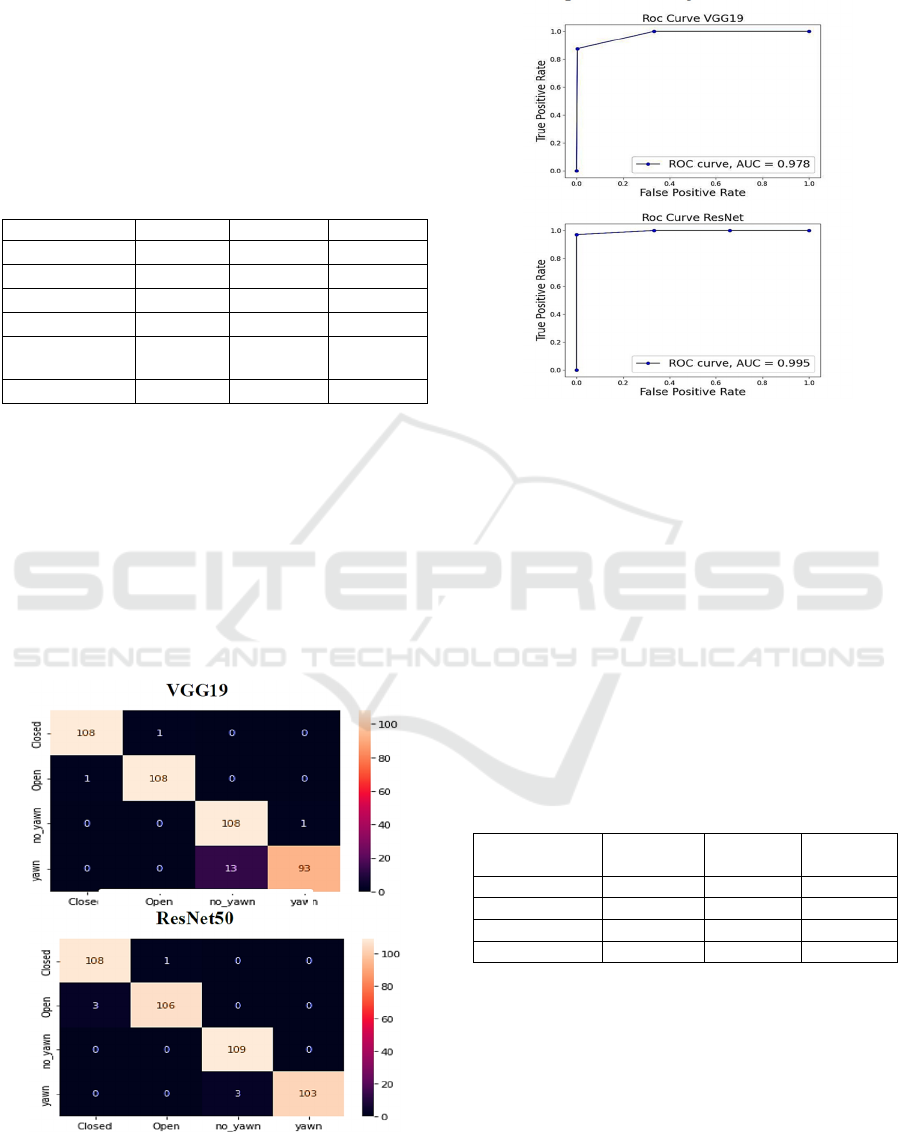
Table 1: Performance metrics for models.
Metric/Model CNN VGG19 ResNet50
Accuracy
0.8900
0.9630 0.9838
Precision
0.8247
0.9658 0.9842
Recall
0.7829
0.9624 0.9837
F1 Score
0.7740
0.9641 0.9839
Time
p
rocessing(s)
800
688 752
Epochs
50
43 47
Table 1 reveals that the ResNet50 model achieved
the highest values for all metrics. The time pro-
cessing is as higher as the number of layers increased
and it is relative to all hardware and software
materials. According to the achieved results, the CNN
model gives the lowest values at all. TL is therefore
more suitable to solve the target task. The ResNet50
model is the most efficient CNN model for the
drowsiness state classification with a testing accuracy
of 98.4%. Figure 6 presents the confusion matrices
for the different used CNN models.
Figure 6: CNN models confusion matrices.
The ROC curves corresponding to the used CNN
models are presented in Figure 7.
Figure 7: The ROC curves related to the DNNs.
These figures confirms that all models are good
classifiers.
To ensure a high-performance DDD system, an
ensemble learning approach based on three
ensembles methods is implemented to combine the
outputs of the models and accurately determine the
driver's state. If the driver is confirmed as drowsy, an
alarm is triggered. Each ensemble method was
rigorously evaluated to assess their effectiveness in
improving recognition of drowsiness states using
metrics such as accuracy, precision, and confusion
matrices. Table 1 depicts the performance metrics for
the obtained models. Table 2 shows the performance
metrics for the used ensemble methods.
Table 2: Performance metrics for ensemble methods.
Ensemble
method
Ensemble
Averaging
Ensemble
Stacking
AdaBoost
Ensemble
Accurac
y
0.89 0.94 0.98
Precision 0.92 0.95 0.98
Recall 0.89 0.94 0.98
F1 Score 0.88 0.94 0.98
Table 2 provides a comprehensive overview of
performance metrics for ensemble methods, with
ensemble Averaging achieves a precision of 0.92,
indicating 92% correct positive predictions. It
identifies 89% of all actual positive cases with a recall
of 0.89. The F1-Score of 0.88 balances precision and
recall, indicating a well-balanced model. Ensemble
Stacking performs even better with a precision of
0.95, indicating a high proportion of correct positive
predictions. It also has a recall of 0.94, indicating
Facial Expression-Based Drowsiness Detection System for Driver Safety Using Deep Learning Techniques
731
strong performance in identifying positive cases. The
F1-Score of 0.94 signifies a well-balanced model,
accurately classifying 94% of the data. AdaBoost
Ensemble outperforms the others with a precision of
0.98, indicating extremely accurate positive
predictions and a recall of 0.98, identifying almost all
positive cases.
The experiments conducted in this study show
that combining car cameras with DL technology is
highly beneficial for drowsiness detection. DL
algorithms can effectively capture and analyze
various drowsiness characteristics from the images
captured by the car camera, enhancing the accuracy
and effectiveness of the drowsiness detection system.
Additionally, the experiments demonstrate that using
ensemble learning approaches can greatly improve
the performance of the DDD system. Ensemble
learning techniques enhance the robustness and
reliability of the system, making it more effective in
detecting and preventing drowsy driving incidents.
5 COMPARISONS
Numerous DDD systems have been suggested in the
literature, employing a wide range of methods and
techniques to formulate their detection procedures.
Among these, the behavioral parameter-based
techniques, also known as image-based systems, have
gained significant popularity. These systems focus
particularly on facial expressions such as eye closure,
eye blinking, and yawning. To conduct a comparative
analysis of the proposed DDD system with these
Table 3: Performance metrics for ensemble methods.
Facial
ex
p
ressions
Reference Accuracy
Based on eye
state
(Tayab Khan,
2019)
95% for the first
data set
70% for the second
data set
95% for the third
data set
(
Marior, 2020
)
95%
(Zandi, 2019)
88.37% to 91.18%
with the RF
classifie
r
(Hashemi,
2020
)
98.15% with the
FD-NN model
Based on
mouth state
(
Alioua, 2014
)
81%
(Xiaoxi, 2017) 91.57%
Based
on eye and
mouth states
(Celecia, 2020) 95.5%
(Alioua, 2011) 94%
The proposed
approach
98%
techniques, we assessed the performance metrics of
the aforementioned DDD systems mentioned in the
paper. Table 3 reviews the DDD systems mentioned
in this paper with the proposed one.
According to table 3, the best accuracy is assigned
to our DDD system proposed in this paper.
The proposed DDD system offers several
advantages that make it suitable for industrialization.
However, the accuracy of driver state detection in this
system heavily relies on the quality of image
processing. Various factors such as wearing
sunglasses, sudden changes in lighting, and the
distance between the camera and the driver's face can
affect the system's performance, potentially leading
to reduced accuracy or false detections. Despite these
challenges, our DDD system is highly advanced and
comparable to other state-of-the-art technologies like
the Traffic Sign Recognition System (TSRS) (Triki,
2023). The DDD system can be integrated into
Advanced Driver Assistance Systems (ADAS) and/or
Automated Driving Systems (ADS) in smart vehicles.
6 CONCLUSIONS
The major cause of road accidents worldwide is
drivers' behavior, particularly drowsiness. To address
this issue, DDD systems have been developed to
detect and model the drowsiness state, allowing for
timely alerts to drivers in dangerous situations.
However, these systems face challenges such as
inaccessibility and lack of performance. Therefore,
there is a need to build a reliable drowsiness detection
system that can accurately and effectively detect
drivers' behavior in real-time. By analysing eye
closure and mouth opening, we have proposed a
functional DDD system to detect a drowsy driver in a
real-time state. The working process has been divided
into learning process and detection process. For the
training, we have applied data augmentation
techniques for the used database to enhance the
training data. Additionally, the DNN models utilized
for learning displayed promising results for
classifying the driver's state and identifying
drowsiness. Moreover, ensemble learning techniques
were employed to assess the drowsiness state.
The proposed DDD system is cost-efficient, easy
to use, non-invasive, and automatic, which makes it
suitable for industrial applications. However, to
ensure a high-quality camera and account for
environmental factors during system development
and testing, careful consideration is necessary.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
732

REFERENCES
Ahmed, M.I.B.; Alabdulkarem, H.; Alomair, F.; Aldossary,
D.; Alahmari, M.; Alhumaidan, M.; Alrassan, S.;
Rahman, A.; Youldash, M.; Zaman, G. (2023). A Deep-
Learning Approach to Driver Drowsiness Detection.
Safety, 9, 65. https://doi.org/10.3390/safety9030065
Alioua, N., Amine, A., Rziza, M., Aboutajdine, D. (2011).
Driver’s fatigue and drowsiness detection to reduce
traffic accidents on road. In Proceedings of the
International Conference on Computer Analysis of
Images and Patterns, Seville, Spain, 29–31 August
2011.
Alioua, N., Amine, A., Rziza, M. (2014). Driver’s Fatigue
Detection Based on Yawning Extraction. Int. J. Veh.
Technol. https://doi.org/10.1155/2014/678786
Aytekin, A., Mençik, V. (2022). Detection of Driver
Dynamics with VGG16 Model. Appl. Comput. Inform.
27, 83-88. https://doi.org/10.2478/acss-2022-0009
Celecia, A., Figueiredo, K., Vellasco, M., González, R.
(2020). A portable fuzzy driver drowsiness estimation
system. Sensors, 20, 4093. https://doi.org/10.
3390/s20154093
Dlib C++ toolkit. Available online: http://dlib.net/
(accessed on 08 Mai 2022).
Dua, M., Shakshi, Singla, R., et al. (2021). Deep CNN
models-based ensemble approach to driver drowsiness
detection. Neural Comput & Applic. 33, 3155–3168.
https://doi.org/10.1007/s00521-020-05209-7
Hashemi, M., Mirrashid, A., Shirazi, A.B. (2020). Driver
Safety Development: Real-Time Driver Drowsiness
Detection System Based on Convolutional Neural
Network. SN Comput. Sci. 1, 1–10.
Ho, N., Kim, YC. (2021). Evaluation of transfer learning in
deep convolutional neural network models for cardiac
short axis slice classification. Sci Rep. 11, 1839.
https://doi.org/10.1038/s41598-021-81525-9
https://doi.org/10.1007/s42979-020-00306-9
Kamti, M. K.; Iqbal, R. (2022). Evolution of Driver Fatigue
Detection Techniques-A Review From 2007 to 2021.
Transp. Res. Rec., 2676, 485–507.
https://doi.org/10.1177/03611981221096118
Kazemi, V., Sullivan, J. (2014). One millisecond face
alignment with an ensemble of regression trees. In
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, Columbus, OH, USA,
23-28 June 2014. https://doi.org/10.1109/CVPR.
2014.241
Kensert, A., Harrison, P.J., Spjuth, O. (2019). Transfer
Learning with Deep Convolutional Neural Networks
for Classifying Cellular Morphological Changes. SLAS
Discov. 24, 466-475. https://doi.org/10.1177/2472555
218818756
Lee, D. (2021). Which deep learning model can best
explain object representations of within-category
exemplars? J Vis. 1;21(10):12.
https://doi.org/10.1167/jov.21.10.12
Marior, C.B.S., das Chagas Moura, M.J., Santana, J.M.M.,
Lins, I.D. (2020). Real-time classification for
autonomous drowsiness de-tection using eye aspect
ratio. Expert Syst. Appl. 158, 113505.
https://doi.org/10.1016/j.eswa.2020.113505
NHTSA. (2017). “Traffic safety facts 2015.”
Potolea, R., Cacoveanu, S., Lemnaru, C. (2010). Meta-
learning Framework for Prediction Strategy Evaluation.
In Proceedings of the International Conference on
Enterprise Information Systems, Funchal-Madeira,
Portugal, 8–12 June 2010.
Ramzan, M., Khan, H.U., Awan, S.M., Ismail, A., Ilyas, M.,
Mahmood, A. (2019). A Survey on State-of-the-Art
Drowsiness Detection Techniques. IEEE Access. 7.
https://doi.org/61904-61919
ROSPA: The Royal Society for the Prevention of Accidents
(2020), Driver Fatigue and Road Accidents Factsheet.
Shabnam, A., Mona, O., Shervin, S., Behnoosh, H. (2014).
YawDD: A yawning detection dataset. In Proceedings
of the 5th ACM Multimedia Systems Conference,
Singapore, 19 March 2014. https://doi.org/10.
1145/2557642.2563678
Tayab Khan, M., Anwar, H., Ullah, F., Ur Rehman, A.,
Ullah, R., Iqbal, A., Lee, B.H., Kwak, K.S. (2019).
Smart real-time video surveillance platform for
drowsiness detection based on eyelid closure. Wirel.
Commun. Mob. Comput. 1–9. https://doi.org/
10.1155/2019/2036818
Transfer Learning & Fine-Tuning. Available online:
https://keras.io/guides/transfer_learning/ (accessed on
20 August 2021).
Triki, N., Karray, M., Ksantini, M. (2023). A Real-Time
Traffic Sign Recognition Method Using a New
Attention-Based Deep Convolutional Neural Network
for Smart Vehicles. Appl. Sci. 13, 4793.
https://doi.org/10.3390/app13084793
Viola, P., Jones, M. (2011). Rapid object detection using a
boosted cascade of simple features. In Proceedings of
the IEEE Computer Society Conference. Kauai, HI,
USA, 8-14 December 2001.
Wilkinson, VE., Jackson, ML., Westlake, J, Stevens, B,
Barnes, M, Swann, P, Rajaratnam, S.M, Howard ME.
(2013). The accuracy of eyelid movement parameters
for drowsiness detection. J Clin Sleep Med. 15;
9(12):1315-24. https://doi.org/10.5664/jcsm.3278
Xiaoxi, M., Chau, L.P., Yap, K.H. (2017). Depth video-
based two-stream convolutional neural networks for
driver fatigue detection. In Proceedings of the 2017
International Conference on Orange Technologies
(ICOT), Singapore, 8–10 December 2017.
Yu, J., Park, S., Lee, S., Jeon, M. (2018). Driver drowsiness
detection using condition-adaptive representation
learning framework. IEEE Trans. Intell. Transp. Syst.
20,4206–4218. https://doi.org/10.48550/arXiv.1910.
09722
Zandi, A.S., Quddus, A., Prest, L., Comeau, F.J. (2019).
Non-intrusive detection of drowsy driving based on eye
tracking data. Transp. Res. Rec. 2673, 247–257.
https://doi.org/10.1177/0361198119847985 .
Facial Expression-Based Drowsiness Detection System for Driver Safety Using Deep Learning Techniques
733
