
ClusterComm: Discrete Communication in Decentralized MARL Using
Internal Representation Clustering
Robert M
¨
uller, Hasan Turalic, Thomy Phan, Michael K
¨
olle, Jonas N
¨
ußlein
and Claudia Linnhoff-Popien
Institute of Informatics, LMU Munich, Munich, Germany
Keywords:
Multi-Agent Reinforcement Learning, Communication, Clustering.
Abstract:
In the realm of Multi-Agent Reinforcement Learning (MARL), prevailing approaches exhibit shortcomings in
aligning with human learning, robustness, and scalability. Addressing this, we introduce ClusterComm, a fully
decentralized MARL framework where agents communicate discretely without a central control unit. Clus-
terComm utilizes Mini-Batch-K-Means clustering on the last hidden layer’s activations of an agent’s policy
network, translating them into discrete messages. This approach outperforms no communication and com-
petes favorably with unbounded, continuous communication and hence poses a simple yet effective strategy
for enhancing collaborative task-solving in MARL.
1 INTRODUCTION
Problems such as autonomous driving (Shalev-
Shwartz et al., 2016) or the safe coordination of robots
in warehouses (Salzman and Stern, 2020) require co-
operation between agents. In order to solve tasks
collaboratively, agents must learn to coordinate by
sharing resources and information. Similar to hu-
mans, cooperation can be facilitated through com-
munication. The ability to communicate allows au-
tonomous agents to exchange information about their
current perceptions, their planned actions or their in-
ternal state. This enables them to cooperate on tasks
that are more difficult or impossible to solve in isola-
tion and without communication.
In Multi-Agent Reinforcement Learn-
ing (MARL), multiple agents interact within a
shared environment. In the simplest case, each
agent is modeled as an independently learning entity
that merely observes the other agents (Independent
Learning). In this scenario, however, at best implicit
communication can take place, as for example with
bees that inform their peers about the position of a
found food source by certain movements (Von Frisch,
1992). In the context of MARL, it has already been
established that cooperation can be improved through
the exchange of information, experience and the
knowledge of the individual agents (Tan, 1993).
The predominant approach to this is to provide
the agents with additional information during train-
ing, such as the global state of the environment at
the current timestep. It is usually desirable to be able
to execute the agents in a decentralized manner after
training, i.e. each agent should only be able to decide
how to act on the basis of information that is available
to it locally. Consequently, the additional information
at training time only serves to speed up training and to
develop more sophisticated implicit coordination and
communication strategies. This paradigm is referred
to as Centralized Learning and Decentralized Execu-
tion.
An even more radical approach is to view all
agents as a single RL agent that receives all the lo-
cal observations of the individual agents and model
the joint action space as a Cartesian product of the in-
dividual action spaces. Since the joint action space
grows exponentially with the number of agents and
agents cannot be deployed in a decentralized fashion,
this approach is rarely used in practice.
To enable agents to communicate with each other
explicitly, recent approaches (Foerster et al., 2016;
Sukhbaatar et al., 2016; Lowe et al., 2017; Das et al.,
2019; Lin et al., 2021; Wang and Sartoretti, 2022)
introduce a communication channel between agents.
This approach poses a considerable exploration prob-
lem, as the probability of finding a consistent com-
munication protocol is extremely low (Foerster et al.,
2016). Furthermore, the initially random messages
add to the already high variance of MARL and fur-
ther complicate training (Lowe et al., 2017; Eccles
Müller, R., Turalic, H., Phan, T., Kölle, M., Nüßlein, J. and Linnhoff-Popien, C.
ClusterComm: Discrete Communication in Decentralized MARL Using Internal Representation Clustering.
DOI: 10.5220/0012384300003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 305-312
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
305

et al., 2019). Many works therefore resort to differen-
tiable communication (Sukhbaatar et al., 2016; Lowe
et al., 2017; Choi et al., 2018; Mordatch and Abbeel,
2018; Eccles et al., 2019; Wang and Sartoretti, 2022),
where agents can can directly optimize the commu-
nication strategies of the other agents through the ex-
change of gradients. To further ease training, some
approaches assume the messages the agents exchange
to be continuous, yielding a high-bandwidth commu-
nication channel and thereby introducing scalability
and efficiency issues.
Neither can humans adapt the neurons of their coun-
terpart, nor is it always possible to gather additional
information about the overall state of the environ-
ment while learning. At its core, human communi-
cation relies upon discrete symbols, i.e. words. Dis-
crete communication may offer greater practical util-
ity (e.g., low-bandwidth communication channels be-
tween robots (Lin et al., 2021)).
Besides, it is common practice in MARL to use
the same neural network for all agents (parameter
sharing). This allows the network to benefit from the
entire experience of all agents and speeds up training.
Again, this assumption does not translate well to how
human individuals gather knowledge. Moreover, it is
reasonable to assume that the joint training of agents
in the real world (without a simulation environment)
should require no central control unit to avoid scala-
bility issues and to increase robustness to malicious
attacks (Zhang et al., 2018).
Based on the above, in this work we assume that
each agent has its own neural network, that there
exists a non-differentiable discrete communication
channel, that there is no central control unit monitor-
ing and influencing the training and that the agents
can receive any additional information solely through
the communication channel.
To this end, we propose ClusterComm to enable dis-
crete communication in fully decentralized MARL
with little performance loss compared to the un-
bounded approach. The internal representation (pol-
icy’s penultimate layer) of an agent is used directly
to create a message. The internal representation. By
clustering the representations using K-Means, a dis-
crete message can subsequently be created using the
index of the assigned cluster.
2 BACKGROUND
In this section, we outline the concepts this work
builds upon. Markov games are the underlying for-
malism for MARL and K-Means is the clustering al-
gorithm ClusterComm uses to discretize messages.
2.1 Markov-Games
In this work, we consider Partially Observable
Markov Games (POMGs) (Shapley, 1953; Littman,
1994; Hansen et al., 2004). At each time step, each
agent receives a partial observation of the full state.
These observations are in turn used to learn appropri-
ate policies that maximize the individual reward.
Formally, a POMG with N agents is defined
by the tuple (N , S, A, O, Ω, P , R , γ) with N =
{1, . . . , N}. Furthermore, S denotes the set of states,
A = {A
(1)
, . . . , A
(N)
} the set of actions and O =
{O
(1)
, . . . , O
(N)
} the set of observation spaces.
At time t, agent k ∈ N observes a partial view o
(k)
t
∈
O
(k)
of the underlying global state s
t
∈ S and sub-
sequently selects the next action a
(k)
t
∈ A
(k)
. The
agents’ stochastic observations o
1:N
t
= {o
(1)
t
, . . . , o
(N)
t
}
thus depend on the actions taken by all agents a
1:N
t−1
as well as the global state s
t
via Ω
o
1:N
t
|s
t
, a
1:N
t−1
.
Similarly, the stochastic state s
t
depends on the pre-
vious state and the chosen actions of all agents
P
s
t
|s
t−1
, a
1:N
t−1
. Finally, each agent k receives a
reward according to an individual reward function
R
(k)
: S ×A × S → R, R = {R
(1)
, . . . , R
(N)
}. Let r
(k)
t
be the reward received by agent k at time t and the
agent’s policy π
(k)
a
(k)
t
|o
(k)
t
a distribution over ac-
tions to be chosen given the local observation. The
goal is to find policies π
1:N
such that the discounted
reward
G
(k)
=
T
∑
t=0
γ
t
r
(k)
t
(1)
is maximized with respect to the other policies in π:
∀
k
: π
(k)
∈ argmax
˜
π
(k)
E[G
(k)
|
˜
π
(k)
, π
(−k)
] (2)
where π
(−k)
= π \ {π
(k)
}.
To explicitly account for the possibility of com-
munication in a POMG (Lin et al., 2021), the POMG
can be extended to include the set of message spaces
M = {M
(1)
, . . . , M
(N)
}. At time t, each agent now
has access to all messages from the previous time
step m
t
= {m
(k)
t−1
∈ M
(k)
|1 ≤ k ≤ N}. The pol-
icy then also processes and receives new messages
π
(k)
a
(k)
t
, m
(k)
t
|o
(k)
t
, m
(k)
t−1
.
2.2 K-Means
Clustering is the most common form of unsupervised
learning. Here, data is divided into groups based on
their similarity without having to assign any labels be-
forehand. The goal is to find a clustering in which
the similarity between individual objects in one group
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
306
is greater than between objects in other groups. To
determine the similarity, distance or similarity func-
tions such as Euclidean distance or cosine similarity
are typically used.
K-Means (Lloyd, 1982) is one of the simplest and
most widely used clustering algorithms and is adopted
in this work to discretize the agent’s internal represen-
tations.
Let D = {x
i
∈ R
D
|, 2 ≤ i ≤ n} be a dataset of n
vectors with D dimensions and µ = {µ
i
∈ R
D
|2 ≤ i ≤
k} be a set of k ≥ 2 centroids of the same dimension-
ality. Further, let µ
x
i
:= argmin
µ
j
∈µ
kx
i
− µ
j
k
2
2
be the
closest centroid of x
i
. The the objective is to to divide
D into k partitions (quantization) such that the sum of
the squared euclidean distances from the centroids is
minimal, i.e.:
argmin
µ
n
∑
i=1
kx
i
− µ
x
i
k
2
2
(3)
Since the search for the optimal solution is NP-hard,
one resorts to approximate algorithms such as Lloyds
algorithm (Lloyd, 1982). Here, the centroids are ini-
tially chosen at random and subsequently each data
point is assigned to the centroid to which the distance
is minimal. The new centroids are then set to the mean
value of all data points assigned to the respective cen-
troid. The last two steps are repeated until conver-
gence.
Mini-Batch-K-Means (Sculley, 2010) is designed
to reduce the memory consumption and allows for it-
erative re-clustering. It considers only a fixed-size
subset of D in each iteration (mini-batches). In ad-
dition, Mini-Batch-K-Means is useful in scenarios
where the entire data set is unknown at any given
time and may be subject to time-dependent changes
(e.g. data streams, concept-drift). This property is of
particular importance for ClusterComm since the un-
derlying featurespace exhibits non-stationarity during
training.
3 CLUSTER COMM
ClusterComm is loosely inspired by the way humans
have learned to communicate over time. Its evolu-
tion started from simple hand movements and imita-
tion of natural sounds to spoken language and is now
an established communication protocol (Fitch, 2010).
Because human communication emerged through the
interaction of individuals without supervision or a
central control mechanism, ClusterComm eschews
parameter sharing and differentiable communication,
unlike most approaches presented in Section 1. In-
stead, all agents learn and act independently, while
still having the ability to exchange discrete messages
through a communication channel.
With the aim of creating a communication mecha-
nism that uses as few assumptions as possible, but as
many as necessary, we propose to discretize the inter-
nal representation of each agent (last hidden layer of
policy net) using Mini-Batch K-Means and use the re-
sulting cluster indices as message. A message is thus
made up of a single integer. Doing so, gives the agents
access to a compact description of the observations
and intended actions of all other agents, information
that is often sufficient to solve a task collaboratively.
Clustering allows agents to compress information
by grouping data based on similarities. In this way,
agents are able to generate meaningful yet compact
messages.
Discrete communication is especially difficult be-
cause without additional mitigations, no gradients can
flow through the communication channel (Vanneste
et al., 2022). However, it is more in line with human
communication as it evolved from sounds and ges-
tures to symbols and words that are discrete (Taller-
man, 2005).
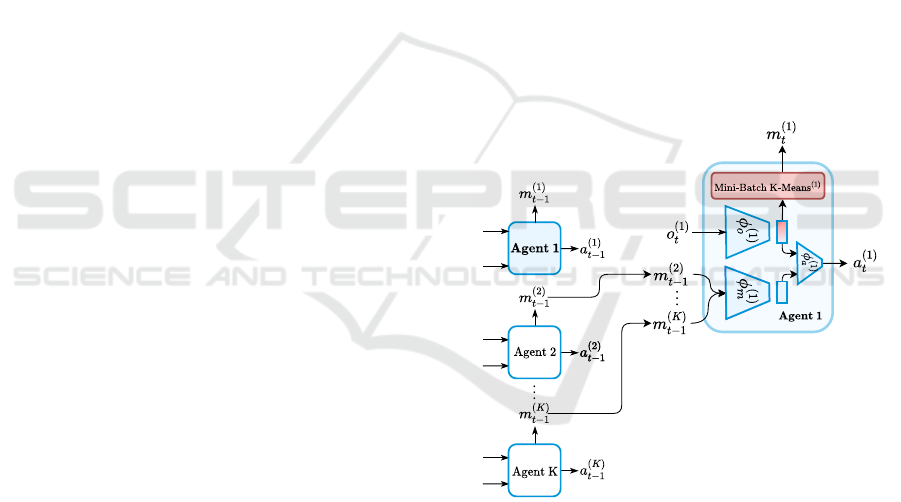
Figure 1: A visual depiction of ClusterComm’s workflow
for agent 1. At time t, agent 1 receives observation o
(1)
t
and
the messages m
(2)
t−1
, . . . , m
(n)
t−1
from the other n − 1 agents.
The output of the message encoder φ
(1)
m
m
2:N
t−1
and ob-
servation encoder φ
(1)
o
o
(1)
t
is concatenated and passed
through φ
(1)
a
to compute the next action a
(1)
t
and the next
message m
(1)
t
. Subsequently, messages are discretized us-
ing Mini-Batch K-Means
(1)
by choosing the cluster index
of the closest centroid.
ClusterComm: Discrete Communication in Decentralized MARL Using Internal Representation Clustering
307

3.1 Algorithm
At each time step t, each agent k ∈ {1, . . . , N} receives
two inputs: the current local observation o
(k)
t
and the
messages m
(−k)
t−1
= {m
(i)
t−1
|1 ≤ i ≤ n ∧i 6= k} sent by all
other agents. Figure 1 illustrates the communication
between agents for a single time step. Each agent uses
a neural observation encoder φ
(k)
o
to create a repre-
sentation for o
(k)
t
. The message encoder φ
(k)
m
receives
the concatenation of m
(−k)
t−1
(as one-hot encoding) and
also produces a representation of the messages re-
ceived. Finally, φ
(k)
a
receives the concatenation of the
representations of the messages and the local obser-
vation and computes the probability distribution over
the action space A
(k)
. Since φ
(k)
o
o
(k)
t
encodes in-
formation about the agent’s observation and intended
action, the output is discretized using Mini-Batch K-
Means. The cluster index of the centroid closest to
the output of the observation encoder is chosen as
the message. Since the parameters of the agents’
networks are continuously adjusted during training
(via gradient descent), the spanned feature space also
varies over the course of training. The na
¨
ıve applica-
tion of K-Means would lead to the centroids being
recalculated in each training step and consequently
the indices being reassigned. As a result, the mes-
sages sent would lose their meaning due to the con-
stantly changing mapping from features to indices.
The continuously evolving feature space resembles a
data stream and thus the use of Mini-Batch K-Means
can alleviate the aforementioned issues. The cen-
troids are continuously adjusted with the occurrence
of new data points, thereby changing the assignment
less frequently.
To train tge agents, we use Proximal Policy Op-
timisation (PPO) (Schulman et al., 2017). PPO is
one of the most widely used algorithms in RL and
is known for being very robust to the choice of hyper-
parameters. Moreover, its superiority in the context
of MARL has been confirmed in recent studies (Yu
et al., 2021; Papoudakis et al., 2021).
3.2 Variants
We propose two additional extensions:
i) Spherical ClusterComm: This variant in-
vestigates the effects of vector normaliza-
tion. We normalize the representations using
ScaleNorm (Nguyen and Salazar, 2019) where
they are projected onto the (d − 1)-dimensional
hypersphere with learned radius r (r ∗
x
kxk
). Thus,
the maximum distance is determined by r, which
prevents individual dimensions from having to
much influence and makes the features more dis-
tinctive (Wang et al., 2017; Zhai and Wu, 2019).
In addition, the use of normalized vectors will
result in clustering based on the angle between
vectors (Hornik et al., 2012) rather than the eu-
clidean distance.
ii) CentroidComm: Although one goal is to re-
duce the message size and use only discrete mes-
sages, we propose another alternative without
these limitations. Instead of the cluster index,
CentroidComm transmits the closest centroid di-
rectly. The messages thus consist of larger, con-
tinuous vectors. CentroidComm therefore uses
more bandwidth for the transmission of mes-
sages during training. At the end of the training,
the centroids of all other agents can be transmit-
ted once to each agent and consequently cluster
indices can be sent again at test time.
4 EXPERIMENTS
We now present the environments used to evaluate
ClusterComm’s performance followed by a brief dis-
cussion of the baselines and the training details.
4.1 Environments
The following episodic environments were used to
asses ClusterComm’s efficacy:
i) Bottleneck: Two rooms are connected by a
single cell (bottleneck). Only one agent is al-
lowed to occupy one cell at any time. Each
agent’s goal is to pass the bottleneck and reach
the other side as quickly as possible. Since only
one agent can move through the bottleneck at
a time, the agents must coordinate their move-
ments.
ii) ClosedRooms: Two agents are placed in the
middle of two separate, enclosed rooms. The
first agent is called the speaker and the second
is called listener. A corner in the speaker’s room
is randomly chosen and marked as the speaker’s
target cell. The listener’s target cell is then the
opposite corner in its respective room. However,
the listener cannot see the speaker nor its target
and must therefore rely on the speaker to com-
municate the goal.
iii) RedBlueDoors (Lin et al., 2021): Two
agents are randomly placed in an empty room.
A red and a blue door are randomly positioned
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
308
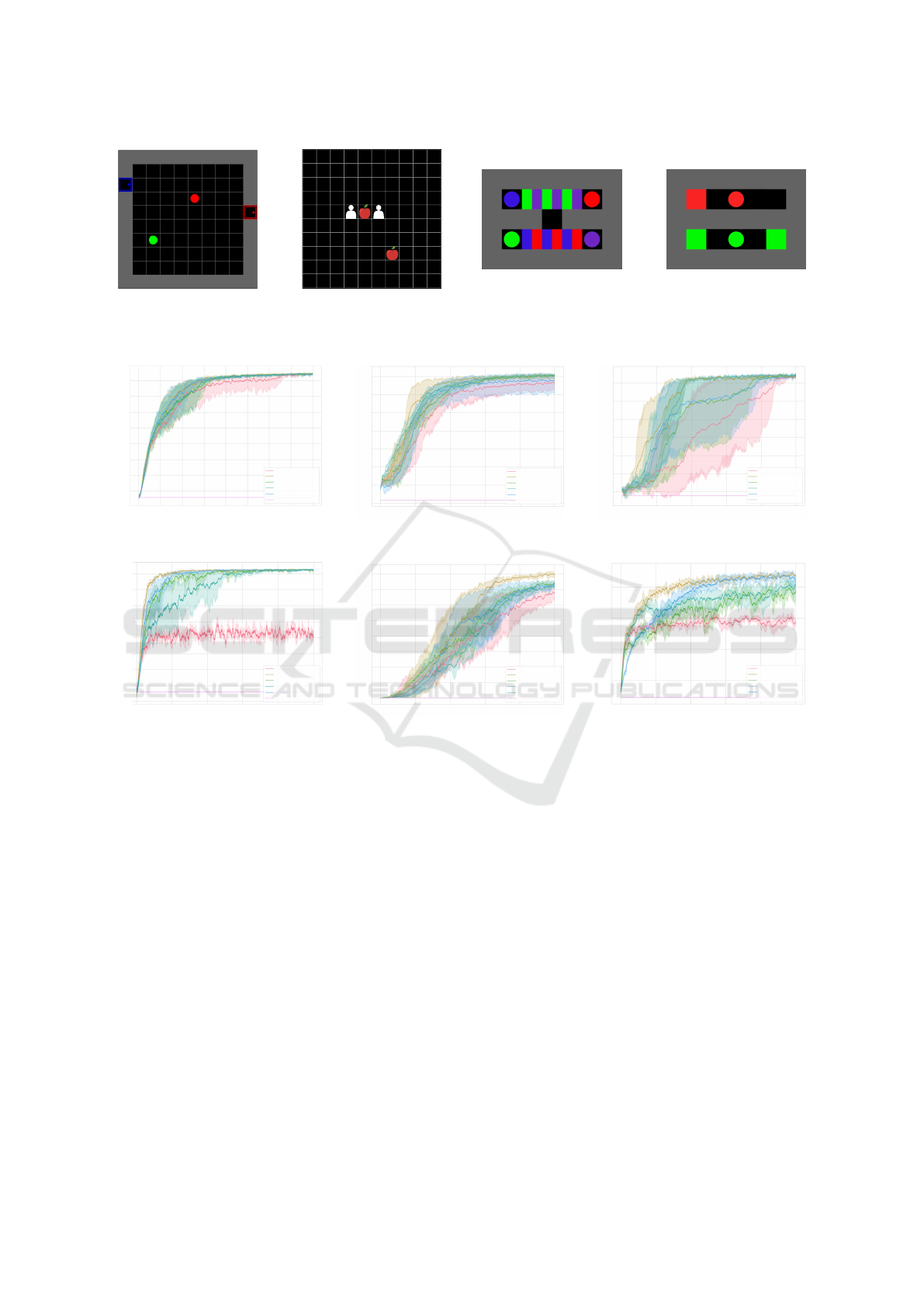
(a) RedBlueDoors.
(b) Level-based Foraging.
(c) Bottleneck (4 Agents). (d) ClosedRooms.
Figure 2: Visual depiction of the different domains used in this work.
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0 2500 500 0 7500 10000 125 00 15000 17500 20 000
Episode
Reward
NoComm
LatentComm
ClusterComm
ClusterComm (Spherical)
CentroidComm
Random
(a) Bottleneck (2 Agents).
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0 20000 40000 60000 80000 100000
Episode
Reward
NoComm
LatentComm
ClusterComm
ClusterComm (Spherical)
CentroidComm
Random
(b) Bottleneck (3 Agents).
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
0 20000 40000 60000 80000 100000
Episode
Reward
NoComm
LatentComm
ClusterComm
ClusterComm (Spherical)
CentroidComm
Random
(c) Bottleneck (4 Agents).
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0 2000 4000 6000 8000 10000
Episode
Reward
NoComm
LatentComm
ClusterComm
ClusterComm (Spherical)
CentroidComm
Random
(d) ClosedRooms.
0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
0 20000 40000 60000 80000 100000
Episode
Reward
NoComm
LatentComm
ClusterComm
ClusterComm (Spherical)
CentroidComm
Random
(e) Level-based Foraging.
0.8
0.6
0.4
0.2
0 20000 4 0000 60000 8 00 00 100000
Episode
Reward
NoComm
LatentComm
ClusterComm
ClusterComm (Spherical)
CentroidComm
Random
(f) RedBlueDoors.
Figure 3: Training curves for all environments.
on the left and the right side of the room, respec-
tively. The goal is to quickly open the red door
first and the blue door afterwards. Note that since
both agents can open both doors, it is possible for
one agent to solve the environment on its own.
iv) Level-based Foraging (Christianos
et al., 2020): Two apples are distributed ran-
domly in the environment. Apples can only be
collected if both agents are standing on a field
adjacent to the apple and decide to collect it at
the same time.
All all cases an agent’s field of view was limited to
5 × 5 and agents do not have the ability to see through
walls. We introduce a small penalty for each step such
that the agents are encouraged to solve the environ-
ments as quickly as possible.
Exemplary illustrations for each environment are
shown in Figure 2.
4.2 Baselines and Training Details
We compare ClusterComm with the following three
baselines:
i) Random: Each action is selected randomly with
equal probability.
ii) NoComm: The agents are trained without a
communication channel.
iii) LatentComm (Lin et al., 2021): The entire rep-
resentation is transmitted. This approach can be
regarded as unrestricted, since the agents trans-
mit continuous, high-dimensional vectors.
The goal is to show that ClusterComm achieves sim-
ilar performance to LatentComm, even though the
agents are only allowed to transmit discrete messages.
Although useful information may be lost through the
use of clustering, ClusterComm is more scalable and
reduces the required bandwidth.
ClusterComm: Discrete Communication in Decentralized MARL Using Internal Representation Clustering
309
Table 1: Performance of trained agents in the Bottleneck environment.
Bottleneck
2 Agents 3 Agents 4 Agents
Algorithm ∅Rew. ∅ Succ. ∅Steps ∅Rew. ∅ Succ. ∅Steps ∅Rew. ∅ Succ. ∅Steps
NoComm 0.70 0.99 9.17 0.52 0.93 12.84 0.67 0.97 18.73
LatentComm 0.70 0.99 9.22 0.60 0.98 12.07 0.67 0.97 19.04
ClusterComm 0.70 0.99 9.39 0.60 0.98 12.21 0.70 0.98 17.78
ClusterComm (Spher.) 0.71 0.99 9.14 0.60 0.98 12.08 0.69 0.97 17.83
CentroidComm 0.71 0.99 9.11 0.55 0.92 11.93 0.67 0.96 18.45
Random -0.87 0.008 26.11 -0.76 0.0 26.83 -0.64 0.0 55.37
Table 2: Performance of trained agents in the ClosedRooms, Level-based Foraging and RedBlueDoors environments.
ClosedRooms Level-based Foraging RedBlueDoors
Algorithm ∅Rew. ∅ Succ. ∅Steps ∅Rew. ∅ Succ. ∅Steps ∅Rew. ∅ Succ. ∅Steps
NoComm 0.40 0.49 2.60 0.39 0.87 60.29 0.58 0.63 48.09
LatentComm 0.82 0.99 3.05 0.60 0.98 47.52 0.86 0.91 34.20
ClusterComm 0.82 0.99 3.05 0.47 0.92 55.53 0.70 0.75 39.92
ClusterComm (Spher.) 0.82 0.99 3.05 0.46 0.93 57.49 0.77 0.83 36.32
CentroidComm 0.82 0.99 3.04 0.42 0.88 57.58 0.84 0.88 26.00
Random 0.06 0.12 9.18 -0.99 0.00 128.00 0.08 0.16 272.44
For ClusterComm, its variations, as well as the
aforementioned baselines, an MLP with the Tanh ac-
tivation function and two hidden layers of size 32 is
used for the message and observation encoder. Both
outputs are concatenated and a linear layer is used to
predict the distribution over actions. Moreover, we
use frame-stacking with the last three observations.
ClusterComm updates the centroids after each PPO
update. The number of clusters is 16 for RedBlue-
Doors and Level-based Foraging and 8 for Bottleneck
and ClosedRooms.
To evaluate the performance of trained agents,
we employ the trained policies over 1000 additional
episodes and record the average reward, the average
number of steps and the success rate (Table 1 and Ta-
ble 2). All experiments are repeated 10 times.
5 RESULTS
In this section, we discuss the results derived from
Figure 3, Table 1 and Table 2. For clarity, these are
discussed separately for each environment.
5.1 Bottleneck
The results are shown in Figures 3 a) to c) and Table 1.
In these experiments, the scalability of ClusterComm
in terms of the number of agents is of particular inter-
est. The more agents are included, the more difficult
the task becomes.
One can see that the difference between the ap-
proaches becomes more obvious as the complexity in-
creases. With two agents (Figure 3 a)), all methods
perform equally well and converge to the optimal so-
lution. However, LatentComm was found to have the
fastest convergence, while NoComm takes more time
to converge and exhibits a less stable learning curve.
The results for three agents are similar. Here, the
difference is that the methods need more episodes to
converge and NoComm fails to find an equally effec-
tive policy in this case. With four agents (figures 3 c)),
the differences between the approaches increase fur-
ther. LatentComm still achieves the best results, fol-
lowed by CentroidComm, ClusterComm and finally
NoComm. In addition, a greater variance than before
can be observed. Due to the considerably increased
coordination effort, the agents have to explore signif-
icantly more during training in order to finally find a
suitable policy. Here, all ClusterComm approaches
help to find it earlier and more reliably.
5.2 ClosedRooms
The results are shown in Figure 3 d). Since this envi-
ronment requires communication, methods like Ran-
dom or NoComm cannot solve the task. NoComm
converges to the optimal strategy possible without
communication, i.e. the listener chooses a random
target in each episode. Thus, the agents successfully
solve the problem in 50% of all cases.
Approaches with communication learn to solve
the problem completely. However, they differ in
learning speed and stability. It is evident that La-
tentComm converges faster and also exhibits lower
variance. ClusterComm and CentroidComm learn
slightly slower, but also converge to the same result.
Furthermore, the variance of ClusterComm is lower
than that of CentroidComm. This can be attributed
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
310

to the message type. After the cluster is updated,
the cluster index often remains the same, while the
centroid changes continuously. This means that the
ClusterComm messages change less frequently for
the same observations, while the CentroidComm mes-
sages change after each update until the procedure
converges.
With respect to table 2, all methods with commu-
nication yield the same optimal results (99% success
rate with an average of 3 steps per episode). No-
Comm successfully solves only half of the episodes,
but with a slightly lower average number of steps.
Agents trained with NoComm choose a corner at ran-
dom and move towards it. The low number of steps
in NoComm is therefore due to the fact that although
agents quickly move to a random corner and termi-
nate the episode, this is the correct solution in only
half of all the cases. In contrast, through the use of
communication, the listener learns to stop at the first
time step and wait for the message sent by the speaker.
5.3 RedBlueDoors
Once again it becomes evident (Figure 3 f)) that the
ability to communicate is advantageous. All methods
with communication achieve very good results. La-
tentComm learns the fastest, closely followed by Cen-
troidComm. Both approaches converge to an optimal
value. The performance of ClusterComm is slightly
worse, but still better than NoComm.
The results from table 2 confirm that LatentComm
(success rate 91%) and CentroidComm (success rate
88%) are the strongest, followed by ClusterComm,
whose success rate is 75% and requires more steps
to complete an episode.
Also noticeable is that CentroidComm takes fewer
steps on average than LatentComm, although La-
tentComm has a higher success rate. We observe
that CentroidComm needs significantly fewer steps
in a successful episode than LatentComm. However,
agents do not coordinate sufficiently in more cases
compared to LatentComm.
Although the continuous adaptation of the representa-
tions during the training of LatentComm leads to the
agents taking longer to solve the problem, it increases
their success rate. By sending the centroids, the vari-
ance of the individual features is limited, since rep-
resentations of different observations can be mapped
onto one and the same centroid. At the same time,
this is the biggest disadvantage of CentroidComm, as
information is lost, which reduces the success rate.
5.4 Level-Based Foraging
It is again clear that all communication-based ap-
proaches outperform NoComm, with LatentComm
providing the best results (Figure 3 e)) due to its con-
tinuous message type. Moreover, all ClusterComm
approaches show roughly the same performance, with
a slight advantage for ClusterComm (Table 2).
Not only do the agents have to find the position
of the food sources, but they also have to agree on
which food source both agents should move to. The
established communication protocol helps the agents
to make the decision.
In general, the results suggest that none of the
ClusterComm variants presented is clearly superior to
the others. Their performance strongly depends on
the environment, the task to be solved and the result-
ing training dynamics.
6 CONCLUSION
In this work, we introduced ClusterComm, a MARL
algorithm aimed at enhancing communication effi-
ciency among agents. ClusterComm discretizes the
internal representations from each agent’s observa-
tions and uses the resulting cluster indices as mes-
sages. Unlike prevalent centralized learning methods,
ClusterComm fosters independent learning without
parameter sharing among agents, requiring only a dis-
crete communication channel for message exchange.
Our empirical evaluations across diverse environ-
ments consistently demonstrated ClusterComm’s su-
periority over the no-communication approach and
yielded competitive performance to LatentComm
which uses unbounded communication. Future work
may involve reducing the dependence of the network
architecture on the number of agents, exploring multi-
index message transmission and extending the com-
munication phase to address information loss, resolve
ambiguities or facilitate negotiation.
ACKNOWLEDGEMENTS
This work was funded by the Bavarian Ministry for
Economic Affairs, Regional Development and Energy
as part of a project to support the thematic develop-
ment of the Institute for Cognitive Systems.
ClusterComm: Discrete Communication in Decentralized MARL Using Internal Representation Clustering
311

REFERENCES
Choi, E., Lazaridou, A., and de Freitas, N. (2018). Com-
positional obverter communication learning from raw
visual input. In International Conference on Learning
Representations.
Christianos, F., Sch
¨
afer, L., and Albrecht, S. V. (2020).
Shared experience actor-critic for multi-agent rein-
forcement learning. In Advances in Neural Informa-
tion Processing Systems (NeurIPS).
Das, A., Gervet, T., Romoff, J., Batra, D., Parikh, D., Rab-
bat, M., and Pineau, J. (2019). Tarmac: Targeted
multi-agent communication. In International Confer-
ence on Machine Learning, pages 1538–1546. PMLR.
Eccles, T., Bachrach, Y., Lever, G., Lazaridou, A., and
Graepel, T. (2019). Biases for emergent communica-
tion in multi-agent reinforcement learning. Advances
in neural information processing systems, 32.
Fitch, W. T. (2010). The Evolution of Language. Cambridge
University Press.
Foerster, J., Assael, I. A., De Freitas, N., and Whiteson, S.
(2016). Learning to communicate with deep multi-
agent reinforcement learning. Advances in neural in-
formation processing systems, 29.
Hansen, E. A., Bernstein, D. S., and Zilberstein, S.
(2004). Dynamic programming for partially observ-
able stochastic games. In AAAI, volume 4, pages 709–
715.
Hornik, K., Feinerer, I., Kober, M., and Buchta, C. (2012).
Spherical k-means clustering. Journal of statistical
software, 50:1–22.
Lin, T., Huh, J., Stauffer, C., Lim, S. N., and Isola, P. (2021).
Learning to ground multi-agent communication with
autoencoders. Advances in Neural Information Pro-
cessing Systems, 34:15230–15242.
Littman, M. L. (1994). Markov games as a framework
for multi-agent reinforcement learning. In Machine
learning proceedings 1994, pages 157–163. Elsevier.
Lloyd, S. (1982). Least squares quantization in pcm. IEEE
transactions on information theory, 28(2):129–137.
Lowe, R., Wu, Y. I., Tamar, A., Harb, J., Pieter Abbeel,
O., and Mordatch, I. (2017). Multi-agent actor-critic
for mixed cooperative-competitive environments. Ad-
vances in neural information processing systems, 30.
Mordatch, I. and Abbeel, P. (2018). Emergence of grounded
compositional language in multi-agent populations. In
Proceedings of the AAAI Conference on Artificial In-
telligence, volume 32.
Nguyen, T. Q. and Salazar, J. (2019). Transformers without
tears: Improving the normalization of self-attention.
In Proceedings of the 16th International Conference
on Spoken Language Translation.
Papoudakis, G., Christianos, F., Sch
¨
afer, L., and Al-
brecht, S. V. (2021). Benchmarking multi-agent
deep reinforcement learning algorithms in coopera-
tive tasks. In Thirty-fifth Conference on Neural Infor-
mation Processing Systems Datasets and Benchmarks
Track (Round 1).
Salzman, O. and Stern, R. (2020). Research challenges and
opportunities in multi-agent path finding and multi-
agent pickup and delivery problems. In Proceedings
of the 19th International Conference on Autonomous
Agents and MultiAgent Systems, pages 1711–1715.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Sculley, D. (2010). Web-scale k-means clustering. In
Proceedings of the 19th international conference on
World wide web, pages 1177–1178.
Shalev-Shwartz, S., Shammah, S., and Shashua, A. (2016).
Safe, multi-agent, reinforcement learning for au-
tonomous driving. CoRR, abs/1610.03295.
Shapley, L. S. (1953). Stochastic games. Proceedings of the
national academy of sciences, 39(10):1095–1100.
Sukhbaatar, S., Fergus, R., et al. (2016). Learning multia-
gent communication with backpropagation. Advances
in neural information processing systems, 29.
Tallerman, M. E. (2005). Language origins: Perspectives
on evolution. Oxford University Press.
Tan, M. (1993). Multi-Agent Reinforcement Learning: In-
dependent versus Cooperative Agents. In ICML.
Vanneste, A., Vanneste, S., Mets, K., De Schepper, T., Mer-
celis, S., Latr
´
e, S., and Hellinckx, P. (2022). An
analysis of discretization methods for communica-
tion learning with multi-agent reinforcement learning.
arXiv preprint arXiv:2204.05669.
Von Frisch, K. (1992). Decoding the language of the bee.
NOBEL LECTURES, page 76.
Wang, F., Xiang, X., Cheng, J., and Yuille, A. L. (2017).
Normface: L2 hypersphere embedding for face verifi-
cation. In Proceedings of the 25th ACM international
conference on Multimedia, pages 1041–1049.
Wang, Y. and Sartoretti, G. (2022). Fcmnet: Full com-
munication memory net for team-level cooperation in
multi-agent systems. In Proceedings of the 21st Inter-
national Conference on Autonomous Agents and Mul-
tiagent Systems, pages 1355–1363.
Yu, C., Velu, A., Vinitsky, E., Wang, Y., Bayen, A., and
Wu, Y. (2021). The surprising effectiveness of ppo
in cooperative, multi-agent games. arXiv preprint
arXiv:2103.01955.
Zhai, A. and Wu, H. (2019). Classification is a strong base-
line for deep metric learning. In 30th British Machine
Vision Conference 2019, BMVC 2019, Cardiff, UK,
September 9-12, 2019, page 91. BMVA Press.
Zhang, K., Yang, Z., Liu, H., Zhang, T., and Basar, T.
(2018). Fully decentralized multi-agent reinforce-
ment learning with networked agents. In International
Conference on Machine Learning, pages 5872–5881.
PMLR.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
312
