
Quantum Advantage Actor-Critic for Reinforcement Learning
Michael K
¨
olle
∗
, Mohamad Hgog
∗
, Fabian Ritz, Philipp Altmann, Maximilian Zorn, Jonas Stein
and Claudia Linnhoff-Popien
Institute of Informatics, LMU Munich, Munich, Germany
fi
Keywords:
Quantum Computing, Quantum Reinforcement Learning, Advantage Actor-Critic.
Abstract:
Quantum computing offers efficient encapsulation of high-dimensional states. In this work, we propose a
novel quantum reinforcement learning approach that combines the Advantage Actor-Critic algorithm with
variational quantum circuits by substituting parts of the classical components. This approach addresses rein-
forcement learning’s scalability concerns while maintaining high performance. We empirically test multiple
quantum Advantage Actor-Critic configurations with the well known Cart Pole environment to evaluate our
approach in control tasks with continuous state spaces. Our results indicate that the hybrid strategy of using ei-
ther a quantum actor or quantum critic with classical post-processing yields a substantial performance increase
compared to pure classical and pure quantum variants with similar parameter counts. They further reveal the
limits of current quantum approaches due to the hardware constraints of noisy intermediate-scale quantum
computers, suggesting further research to scale hybrid approaches for larger and more complex control tasks.
1 INTRODUCTION
Quantum computing (QC) promises to revolutionize
problem-solving by exploiting quantum mechanics’
unique properties, potentially outperforming classical
computers in complex tasks such as quantum cryptog-
raphy, quantum chemistry, and quantum optimization
(Nielsen and Chuang, 2010; Preskill, 2018; Pirandola
et al., 2020; Shor, 1997; Cao et al., 2019; Bauer et al.,
2020; Dral, 2020; Farhi and Harrow, 2016; Cerezo
et al., 2020; Farhi et al., 2014). This has spurred in-
terest in quantum machine learning (QML), particu-
larly in leveraging quantum interference for acceler-
ated training and inference in machine learning mod-
els (Biamonte et al., 2017).
Reinforcement learning (RL) is a machine learn-
ing subfield focused on training agents to interact with
an environment and learn from their experiences. RL
has achieved remarkable success in applications such
as game playing (e.g., AlphaGo (Silver et al., 2017)),
robotics (Kober et al., 2013), and autonomous driv-
ing (You et al., 2017). However, the performance of
classical RL algorithms is often limited by their sam-
ple inefficiency. This leads to slow convergence and
requires a large number of interactions with the en-
vironment. Since quantum computing offers the effi-
cient encapsulation of high-dimensional states as one
*
Authors contributed equally to this work.
of its significant benefits, recent research interest in
quantum reinforcement learning (QRL) has emerged
(Meyer et al., 2022b).
This work concentrates on the Advantage Actor-
Critic (A2C) method, a well-established RL algo-
rithm, in the context of QRL (Konda and Tsitsiklis,
1999; Mnih et al., 2016; Andrychowicz et al., 2021).
We explore the application of variational quantum cir-
cuits (VQCs) in policy gradient methods like A2C,
suitable for current noisy intermediate scale quantum
(NISQ) computers (Preskill, 2018). We introduce two
A2C configurations: a pure quantum and a hybrid
quantum classical configuration. We employ VQCs
for both the actor and critic components, and evalu-
ate our experiments on the Cart Pole control problem
from OpenAI gymnasium (Brockman et al., 2016).
First, we compare the performance of our quantum
A2C configurations with the classical A2C algorithm,
ensuring a similar number of parameters. Further-
more, we investigate the effectiveness of a VQC with
a classical post-processing layer. Finally, we compare
the performance of this hybrid approach with a clas-
sical A2C algorithm, maintaining a similar parame-
ter count. This study aims to demonstrate the en-
hanced learning efficiency and accuracy of quantum
A2C algorithms in control tasks with continuous state
spaces.
Kölle, M., Hgog, M., Ritz, F., Altmann, P., Zorn, M., Stein, J. and Linnhoff-Popien, C.
Quantum Advantage Actor-Critic for Reinforcement Learning.
DOI: 10.5220/0012383900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 297-304
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
297

2 RELATED WORK
Research in QRL has progressed significantly, with
studies exploring quantum algorithms and circuits for
both policy-based and value-based methods, compar-
ing QRL to classical RL, and applying QRL to real-
world problems (Kwak et al., 2021).
Early research introduced VQC for RL, specifi-
cally in approximating Q-value functions in Deep Q-
Learning (DQN) for discrete and continuous environ-
ments (Chen et al., 2019; Skolik et al., 2022). En-
hancements like Double DQN were also adapted into
VQC architecture, showing efficacy in tasks like robot
navigation and in various OpenAI Gym environments
(Heimann et al., 2022; Lockwood and Si, 2020).
Significant advancements in policy-based QRL
methods have been made, with studies using VQC for
algorithms like REINFORCE (Jerbi et al., 2022; Jerbi
et al., 2021; Sequeira et al., 2022). In actor-critic
methods, VQCs have been effectively used as actor
and critic networks. Examples include a policy-VQC
for Proximal Policy Optimization and a soft actor-
critic algorithm with VQCs outperforming classical
models (Kwak et al., 2021; Lan, 2021). Addition-
ally, a quantum version of the A3C algorithm demon-
strated superior convergence speed and sample effi-
ciency (Chen, 2023).
Addressing the NISQ era’s qubit limitations, stud-
ies have combined VQC with neural networks for effi-
cient data processing. Pre-processing neural networks
and tensor networks have been employed for dimen-
sionality reduction, while post-processing layers have
enhanced VQC’s expressive power (Mari et al., 2020;
Chen et al., 2021; Chen et al., 2022; Chen, 2023; Se-
queira et al., 2022; Hsiao et al., 2022; Meyer et al.,
2022a).
3 QUANTUM ADVANTAGE
ACTOR-CRITIC
The first step in the A2C algorithm (Line 1) involves
initializing both the actor-network π
θ
(s) and the critic
network V
ω
(s) with random parameters θ and ω. The
actor-network maps the current state of the environ-
ment to an appropriate action, while the critic net-
work maps the current state to its corresponding state
value. Then, initialize the stochastic gradient descent
optimizer Adam (Kingma and Ba, 2014) to update the
parameters θ and ω throughout the optimization pro-
cess.
Once the networks have been initialized, the algo-
rithm enters a loop that iterates for each episode. In
each iteration t, the algorithm selects an action a
t
Initialize the environment;
Initialize the actor-network π
θ
(s);
Initialize the critic-network V
ω
(s);
Initialize Adam optimizer for θ and ω;
for each episode do
Initialize next observation state s
t
env.reset();
Initialize done d = False;
for each iteration t do
Select an action a
t
based on π
θ
(s
t
);
Execute action a
t
in the environment;
Observe reward r
t
, new state s
t+1
, and
done d;
if d = True then
break;
end
Calculate TD target value
y = r
t
+ γV
ω
(s
t+1
);
Calculate advantage A = y −V
ω
(s
t
);
Update the actor-network by
minimizing the loss
L
actor
(θ) = −A logπ
θ
(a
t
);
Update the critic-network by
minimizing the loss
L
critic
(ω) = (y −V
ω
(s
t
))
2
;
Update the state s
t
= s
t+1
;
end
end
Algorithm 1: Advantage Actor-Critic Algorithm (Mnih
et al., 2016).
based on the current state s of the environment, as de-
termined by the actor-network π
θ
(s). This action is
executed in the environment, and the algorithm ob-
serves the resulting reward r
t
, the new state s
t+1
, and
the done status d, which indicates whether the episode
has ended.
The next step is calculating the TD target value y.
The advantage A is estimated from the TD error (dif-
ference between the TD target value y and the pre-
dicted state value). The advantage is then used to up-
date the actor-network by minimizing the loss func-
tion L
actor
(θ). and the critic-network V
ω
(s) by mini-
mizing the loss function L
critic
(ω).
Finally, the state s
t
of the environment is up-
dated to the new state s
t+1
, and the algorithm repeats
the loop for the next iteration. This process contin-
ues until the maximum number of episodes has been
reached, or d is set to True, at which point the A2C
algorithm terminates.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
298
3.1 Baselines
In our study, we compared quantum A2C algorithms
with classical A2C implementations using neural net-
works of varying sizes, ensuring comparable model
sizes for a fair analysis. Specifically, we contrasted
a classical A2C with four hidden neurons against our
quantum A2C, and another with five hidden neurons
against our hybrid A2C (Sections 3.2 and 3.3). The
neural network architectures, consist of an input layer
with four input neurons to encode the 4-dimensional
state, a single hidden layer, and an output layer with
two neurons for the actor-network and one for the
critic network.
The choice of four and five neurons in the hid-
den layer for the classical A2C models was deliber-
ate, aligning the number of trainable parameters with
those in the quantum and hybrid A2C models. This
alignment ensures that performance differences are
attributable to the inherent characteristics of the mod-
els rather than parameter count discrepancies.
For the neural networks’ activation functions, we
employed the Rectified Linear Unit (ReLU) function
(Agarap, 2018) in both actor and critic networks to
address the vanishing gradient problem. In the actor-
network’s output layer, a softmax activation function
(Bridle, 1990) was used to generate a probability dis-
tribution.
3.2 Quantum Advantage Actor-Critic
Algorithm
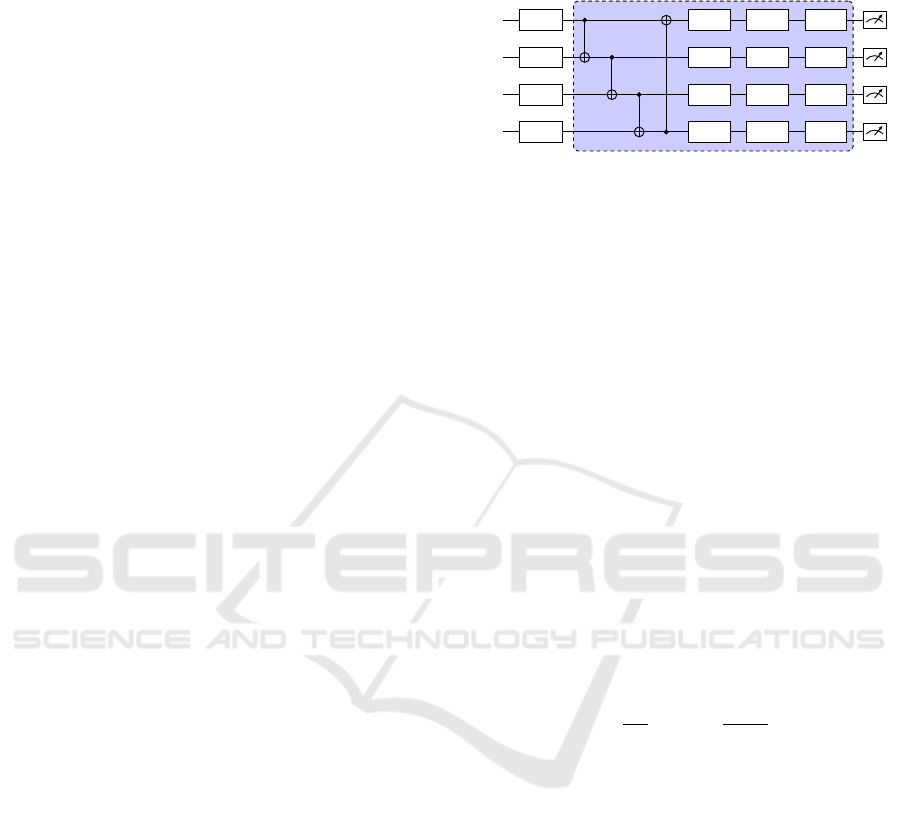
In this work, we employ a specific VQC architecture,
shown in Fig. 1, for both actor and critic quantum cir-
cuits in the QA2C and HA2C algorithms. A VQC
comprises three main components: an encoding layer,
repeated variational layers, and measurements.
The proposed VQC utilizes RX quantum gates to
encode the observed state of the environment into a
quantum state. For the Cart Pole problem, the ob-
served state is four-dimensional, necessitating four
qubits in both the actor and critic circuits to represent
the state information.
Following the encoding process, a variational
layer is applied, repeated a specific number of times
n. In this particular implementation, we use n = 2
repetitions. Each variational layer consists of four
CNOT gates to entangle all qubits and three single-
qubit gates, R
Z
(θ
i
), R
Y
(φ
i
), and R
Z
(δ
i
), applied to
each qubit i (Kwak et al., 2021). The parameters θ, φ,
and δ are iteratively optimized using the classical op-
timization algorithm Adam (Kingma and Ba, 2014).
Lastly, each qubit’s state is measured, and the
measurement outcomes are utilized to determine the
action for the actor and the state value for the critic in
the following steps of the A2C algorithm.
VARIATIONAL LAYER
|
0
⟩
R
X
(λ
1
) R
Z
(θ
1
) R
Y
(φ
1
) R
Z
(δ
1
)
|
0
⟩
R
X
(λ
2
) R
Z
(θ
2
) R
Y
(φ
2
) R
Z
(δ
2
)
|
0
⟩
R
X
(λ
3
) R
Z
(θ
3
) R
Y
(φ
3
) R
Z
(δ
3
)
|
0
⟩
R
X
(λ
4
) R
Z
(θ
4
) R
Y
(φ
4
) R
Z
(δ
4
)
Figure 1: VQC architecture utilized by QA2C and HA2C
algorithms.
3.2.1 State Encoding
In this work, the RX gate is employed for encoding,
which acts on a single qubit and performs a rotation
around the x-axis of the Bloch sphere (Nielsen and
Chuang, 2010). Given that RX rotations are periodic
with a period of 2π, different values might map to
the same quantum state, leading to inaccurate predic-
tions. To mitigate this issue, additional operations are
applied to the observed state variables to ensure the
parameters fall within the range of [−π,π].
The first two variables o
1
and o
2
have finite
ranges, whereas the last two variables o
3
and o
4
have
infinite ranges. Consequently, we establish separate
normalization and transformation rules for these two
groups of variables.
For the cart’s position o
1
and the pole’s angle o
2
,
which have finite ranges, the normalization procedure
consists of simple scaling using their respective mini-
mum and maximum values:
λ
1
=
π
4.8
o
1
,λ
2
=
π
0.418
o
2
, (1)
where λ
1
and λ
2
denote the transformed variables that
are input into the quantum circuit.
The normalization process is more intricate than
simple scaling for the cart’s velocity o
3
and the pole’s
angular velocity o
4
, which have infinite ranges. To
normalize these values, we first use the arctan func-
tion to map the infinite range to the finite interval
[−π/2,π/2] and then apply simple scaling to stretch
the interval to the desired range. The process can be
expressed as follows:
λ
3
= 2arctan o
3
,λ
4
= 2arctan o
4
(2)
where λ
3
and λ
4
represent the transformed variables
used in the quantum circuit.
3.2.2 Measurement and Action Selection of the
Quantum Actor
The actor’s VQC in the QA2C algorithm is designed
to convert the observed state into a quantum state and
Quantum Advantage Actor-Critic for Reinforcement Learning
299

predict the optimal action to take. We use a VQC
comprising four qubits and two variational layers. At
the end of the circuit, the qubits are measured, and the
probability of measuring 0 is employed to determine
the actor’s action. Given that the action space in the
Cart Pole environment is two-dimensional, only the
measurement values of the first two qubits are consid-
ered.
To convert these values into a probability distribu-
tion, we apply the softmax function, which maps the
input vector (in this case, the probabilities of the first
two qubits) to a probability distribution that sums to 1
(Bridle, 1990). The softmax function is defined as:
softmax(x
i
) =
e
x
i
∑
j
e
x
j
(3)
where x
i
represents the i-th element of the input vec-
tor, e denotes Euler’s number, and the sum is taken
over all elements in the input vector. After obtaining
the probability distribution, the actor selects its action
stochastically by randomly choosing an action from
the probability distribution, based on the probabilities
assigned to each action.
3.2.3 Measurement in Quantum Critic
In the QA2C algorithm, the quantum critic employs a
VQC to estimate the value function, which serves as
a measure of the quality of a given state for the agent.
As only a single value is needed for the estimation,
the quantum critic measures just the first qubit and uti-
lizes the probability of measuring 0 as the estimated
state value.
3.3 Hybrid Quantum Advantage
Actor-Critic Algorithm
In this section, we explore the potential of integrating
VQCs and neural networks within the A2C algorithm.
Neural networks can be employed in conjunction with
VQCs as pre-processing and post-processing layers
(Chen, 2023).
In the VQC architecture depicted in Fig. 1, we
measured at most two qubits for the actor and one
qubit for the critic. With the proposed hybrid archi-
tecture, we expand the VQC by incorporating a post-
processing neural network layer. This modification
allows us to measure all four qubits and scale the
VQC output to the desired measurement size. For the
actor, we reduce the output from four values to two,
corresponding to the action space of the environment.
In the case of the critic, we reduce the output from
four values to a single value needed for the state value
function.
We refer to the proposed architecture as the Hy-
brid Advantage Actor-Critic (HA2C), which will be
applied to the QA2C algorithm in three different ap-
proaches. The first approach entails replacing the
critic network with a hybrid VQC while retaining the
neural network for the actor. The second approach
involves substituting the actor-network with a hybrid
VQC while keeping the critic as a neural network. Fi-
nally, we replace both the actor and critic neural net-
works with hybrid VQCs.
3.3.1 Hybrid Quantum Actor
The hybrid actor in the HA2C algorithm combines a
VQC with a post-processing single-layer neural net-
work, as illustrated in Fig. 2a. The measurements ob-
tained from the VQC are used as inputs for the post-
processing layer. The neural network has four inputs
and two outputs, enabling the use of measurements
from all the qubits, rather than just two, as in the quan-
tum actor in QA2C. The softmax activation function
is employed at the neural network output to generate
the probability distribution for the actor.
3.3.2 Hybrid Quantum Critic
Similarly, the hybrid critic model comprises a combi-
nation of a VQC and a post-processing neural network
layer, as depicted in Fig. 2b. The quantum circuit pro-
duces measurements that are subsequently used as in-
put for the neural network. The critic’s output is a sin-
gle value, the state function, which means the neural
network also has only one output. This setup allows
the use of measurements from all four qubits in the
VQC to estimate the state value, providing the neural
network with a comprehensive set of information to
process.
4 EXPERIMENTAL SETUP
This paper investigates the classical A2C algorithm
with two distinct implementations, each utilizing two
neural networks, as described in Section 3.1 on the
CartPole environment. The first implementation em-
ploys four neurons in its hidden layer, while the sec-
ond uses five neurons. Additionally, we examine the
quantum versions of A2C, which includes two main
architectures: QA2C and HA2C, as explained in Sec-
tion 3.2 and Section 3.3, respectively. Finally, for
both architectures, we present three different actor-
critic implementations.
In the first implementation, we replaced the neu-
ral network for the critic with a VQC in QA2C and a
VQC with post-processing in HA2C, while the actor
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
300
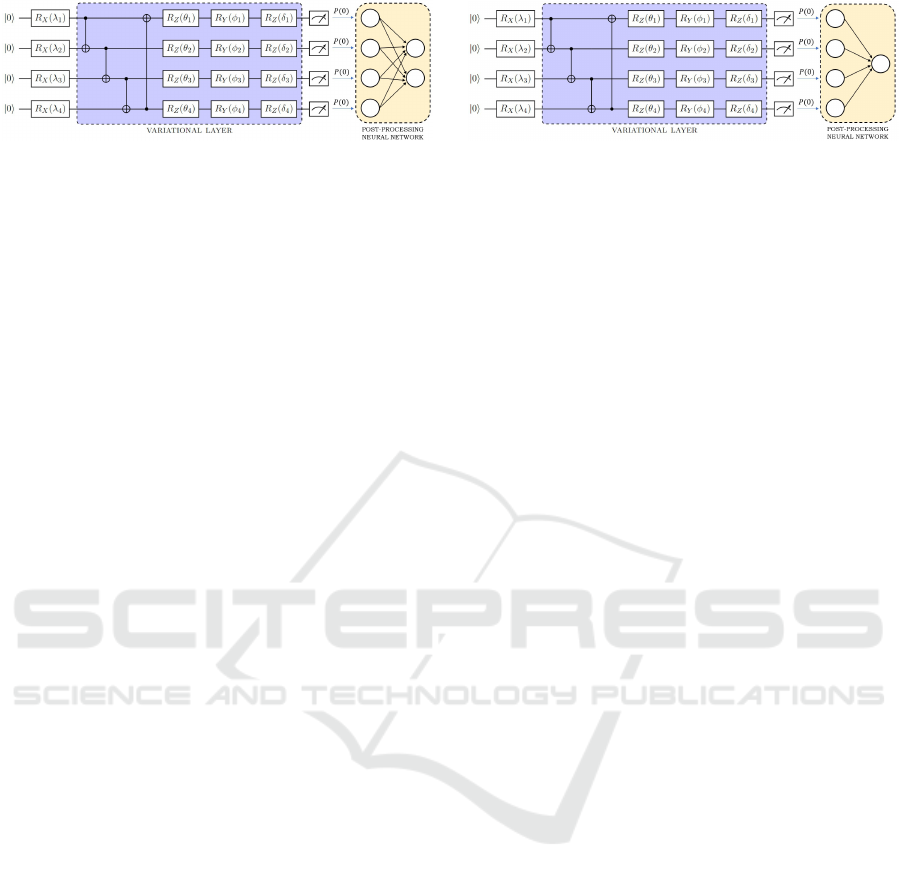
(a) Hybrid VQC used as hybrid actor (b) Hybrid VQC used as hybrid critic
Figure 2: Hybrid VQC-based hybrid actor and critic models.
remained a neural network. We refer to this as the Ad-
vantage Actor-Quantum-Critic (A2Q) algorithm. The
second implementation involved using a VQC for the
actor in QA2C and a VQC with post-processing in
HA2C, while the critic remained a neural network.
We refer to this as the Advantage Quantum-Actor-
Critic (Q2C) algorithm.
Finally, in the third implementation, we replaced
both the actor and critic neural networks with a VQC
in QA2C and a VQC with post-processing in HA2C.
We refer to this as the Advantage Quantum-Actor-
Quantum-Critic (Q2Q) algorithm.
The classical actor and critic in QA2C and HA2C
used a neural network with four and five neurons in
the hidden layer, respectively. Furthermore, in all
experiments, the QA2C and HA2C algorithms were
benchmarked against a classical A2C algorithm with
four and five neurons in its hidden layer, respectively.
Classical neural networks for actor and critic were
implemented using the popular deep learning library
PyTorch (Paszke et al., 2019), and we used Penny-
Lane, a widely-used quantum machine learning li-
brary, to implement VQCs. The experiments were
conducted on the compute cloud provided by Leibniz-
Rechenzentrum der Bayerischen Akademie der Wis-
senschaften (LRZ), which consists of one Intel(R)
Xeon(R) Platinum 8160 CPU.
4.1 Cart Pole
The OpenAI-provided Cart Pole environment is a
standard benchmark for RL algorithm performance
evaluation (Brockman et al., 2016). This environment
features a cart moving on a track with a hinged pole.
The agent’s goal is to prevent the pole from falling by
controlling the cart’s movement.
The Cart Pole environment is well-suited for test-
ing QRL algorithms due to its simplicity, the chal-
lenge of balancing the pole through a series of actions,
and a clear reward signal for easy algorithm evalua-
tion and comparison. It involves four state variables
representing the cart’s position and velocity, and the
pole’s angle and angular velocity (Gymlibrary, 2022).
The continuous nature of these state variables, which
can take any real value within a range, adds complex-
ity to the learning process.
In this RL setting, the agent aims to keep the pole
upright by moving the cart left or right. Rewards are
based on the duration the pole is balanced: positive re-
wards accumulate each timestep the pole remains up-
right. Failure occurs if the pole falls (exceeds ±12°) or
the cart strays too far from the center (beyond ±2.4),
ending the episode (Gymlibrary, 2022). Success is
achieved if the pole stays upright for 500 steps, mo-
tivating the RL agent to maximize pole balancing du-
ration.
4.2 Hyperparameters and Model Size
Hyperparameters, such as learning rates and discount
factors, play a crucial role in determining the per-
formance of RL algorithms (Henderson et al., 2017).
Therefore, we conducted a small-scale hyperparame-
ter tuning study to find a suitable learning rate α and
discount factor γ for the classical A2C, QA2C, and
HA2C algorithms. Based on the results, we selected
a learning rate α = 1 × 10
−4
to be used in the Adam
optimizer and a discount factor γ = 0.99 for all algo-
rithms. All runs were executed on nodes with Intel(R)
Core(TM) i5-4570 CPU @ 3.20GHz.
Our proposed VQC for the QA2C and HA2C al-
gorithms is visualized in Fig. 1. The VQC employs
four qubits and two variational layers, with each layer
consisting of three single-qubit rotations, resulting in
a total of 24 quantum parameters to be optimized. To
ensure fair comparisons between the classical A2C
and the quantum algorithms, we implemented the
A2C algorithm with four and five neurons in the hid-
den layer.
5 RESULTS
The first experiment aimed to compare the perfor-
mance of three versions of the QA2C algorithm with
the classical A2C algorithm, which had four neurons
in the hidden layer. All algorithms were trained on 10
runs, each consisting of 450,000 and 1,000,000 steps
Quantum Advantage Actor-Critic for Reinforcement Learning
301
in Fig. 3, respectively. The x-axis denotes the steps,
the y-axis shows the average reward obtained for all
runs in each step, and the shaded region represents
the standard deviation of the results.
The results revealed that none of the proposed
quantum architectures, namely A2Q, Q2C, and Q2Q,
could learn the Cart Pole environment across all
runs. In contrast, classical A2C demonstrated a stable
learning curve until a sudden drop at around 400,000
steps reaching a reward of 73. However, the reward
threshold for the Cart Pole environment is 475, which
the classical A2C’s average reward did not attain, in-
dicating its inability to solve the environment across
all runs.
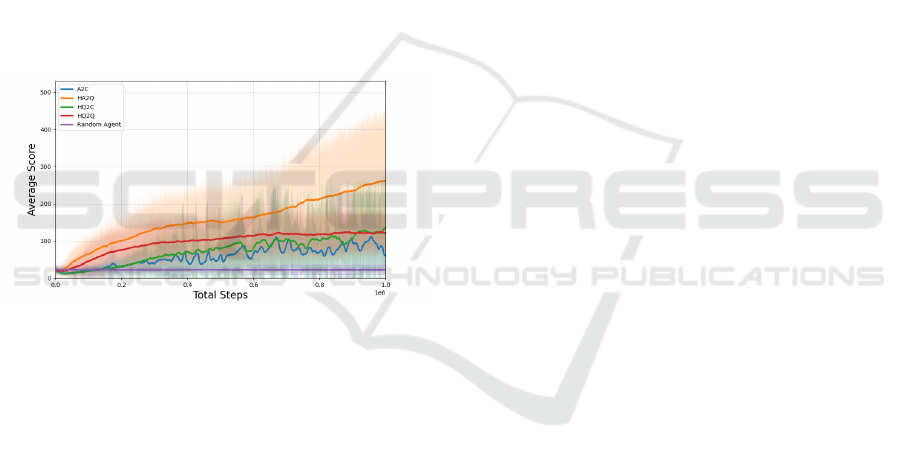
The goal of the second experiment was to improve
the architecture of the VQC by combining it with a
post-processing neural network in order to achieve
better results. Fig. 3 shows the performance of the
classical A2C with 5 neurons in the hidden layer and
the three versions of the HA2C algorithm: HA2Q,
HQ2C, and HQ2Q.
Figure 3: HA2C and classical A2C performance in Cart
Pole.
The aim was to train both algorithms on 10 runs,
each with 1,000,000 steps in the Cart Pole environ-
ment. In Fig. 3, we can see an evident success for
the HA2C algorithms over classical A2C, especially
in HA2Q and HQ2Q. The proposed hybrid architec-
ture learned the task in almost every run, while the
classical A2C succeeded in only 5 of the 10 runs.
Two additional VQCs with different single-qubit ro-
tations were also tested in a pre-study for the QA2C
and HA2C algorithms. However, the other QA2C al-
gorithms also failed to learn.
In conclusion, the experiments demonstrated that
the hybrid quantum-classical approach could achieve
better results than the classical A2C algorithm with
5 neurons in the hidden layer. Specifically, the HA2C
algorithms, HA2Q and HQ2Q, showed significant im-
provement over the classical A2C algorithm, learning
the Cart Pole environment in almost every run. This
highlights the potential of combining quantum and
classical architectures to enhance the performance of
reinforcement learning algorithms.
However, it is essential to consider the signif-
icantly longer training time for the quantum algo-
rithms compared to the classical A2C algorithm. This
performance gap emphasizes the need for further re-
search and optimization of quantum algorithms to re-
duce training time and improve their applicability in
real-world scenarios.
Future work could involve exploring alternative
quantum architectures or optimization methods to en-
hance performance and reduce training time. Addi-
tionally, more complex environments and tasks could
be considered to further investigate the potential of
quantum-classical hybrid approaches in reinforce-
ment learning.
5.1 Discussion
After conducting experiments on the Cart Pole en-
vironment, it became evident that the pure quantum
A2C algorithm did not effectively learn the task. Af-
ter looking at the average gradients (−0.000056), we
concluded that this was caused by vanishing gradi-
ents. Both hybrid approaches, A2Q and Q2C suffer
from the same problem using the quantum actor and
quantum critic. Additionally, like with any machine
learning algorithm, the performance of VQCs can be
influenced by several factors, including hyperparame-
ter settings, circuit structure, and task complexity. To
improve the performance of the quantum algorithm,
future work could explore techniques such as circuit
ansatz design or gradient-free optimization to miti-
gate this issue (McClean et al., 2018; Chen et al.,
2022). In summary, the quantum approach did not
provide any significant advantage over classical meth-
ods.
Building upon that, we employ VQCs with clas-
sical post-processing to circumvent barren plateaus.
This proved to be more effective in addressing the
challenges of the Cart Pole environment than the clas-
sical A2C algorithm, as the hybrid quantum A2C sub-
stantially outperforms the classical A2C in learning
the environment. The VQC uses a post-processing
neural network, which may be crucial for enabling
the VQC to learn. Notably, both HA2Q and HQ2C
started to learn the task immediately, while HQ2Q
learned at a slower rate.
These experiments were conducted on a quan-
tum simulator since current quantum hardware is not
widely available at the time of writing. This circum-
stance leads to significantly higher training times for
all tested quantum approaches than the classical base-
line. Thus, without access to an actual quantum de-
vice, there is currently no real benefit to the quantum
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
302

approaches. Even with exclusive access to real quan-
tum hardware, we can not say for certain if a quantum
parameter trains as fast as a classical one. It is es-
sential to recognize that the field of quantum comput-
ing and quantum machine learning is still in its early
stages, with much research needed to gain a deeper
understanding of the capabilities and limitations of
VQCs in machine learning. As such, further explo-
ration is necessary to unlock the full potential of this
emerging technology.
6 CONCLUSION
We investigated how quantum computing techniques
could enhance the performance of the A2C algorithm.
To achieve this goal, we conducted experiments and
compared the performance of three variations of the
A2C algorithm: classical, quantum, and hybrid A2C.
In each variation, we replaced either the actor, critic,
or both with a quantum circuit, leading to a total of
three different configurations. By testing these con-
figurations, we aimed to understand the impact of
each variation on the algorithm’s overall performance.
Furthermore, ensuring a fair comparison between the
algorithms was a significant challenge in this study.
Therefore, to maintain fairness, we kept the number
of parameters in the algorithms roughly equal.
Our results show that the classical A2C outper-
forms the pure quantum A2C. To improve the quan-
tum A2C performance, we introduced a hybrid ap-
proach integrating a VQC with a post-processing neu-
ral network layer. We tested three configurations of
the hybrid algorithm and found that it substantially
outperformed both the quantum and classical coun-
terparts. This paper contributes to the growing body
of evidence highlighting the potential of combining
quantum computing and classical machine learning
algorithms to improve reinforcement learning tasks’
performance.
Future research in RL and QRL is essential, par-
ticularly in hyperparameter tuning, which is vital for
optimizing performance. Exploring various VQC
architectures, including data re-uploading, not used
in our current models, could enhance performance
(P
´
erez-Salinas et al., 2020). Investigating different
encoding strategies like amplitude encoding (Schuld
and Petruccione, 2018), and employing techniques
like weight re-mapping (K
¨
olle et al., 2023) could im-
prove convergence.
ACKNOWLEDGEMENTS
This research is part of the Munich Quantum Valley,
which is supported by the Bavarian state government
with funds from the Hightech Agenda Bayern Plus.
REFERENCES
Agarap, A. F. (2018). Deep learning using rectified linear
units (relu). arXiv preprint arXiv:1803.08375.
Andrychowicz, M., Raichuk, A., Sta
´
nczyk, P., Orsini, M.,
Girgin, S., Marinier, R., Hussenot, L., Geist, M.,
Pietquin, O., Michalski, M., et al. (2021). What mat-
ters for on-policy deep actor-critic methods? a large-
scale study. In International conference on learning
representations.
Bauer, B., Bravyi, S., Motta, M., and Chan, G. K.-L.
(2020). Quantum Algorithms for Quantum Chemistry
and Quantum Materials Science. Chemical Reviews,
120(22):12685–12717. Publisher: American Chemi-
cal Society.
Biamonte, J., Wittek, P., Pancotti, N., Rebentrost, P., Wiebe,
N., and Lloyd, S. (2017). Quantum machine learning.
Nature, 549(7671):195–202.
Bridle, J. S. (1990). Probabilistic interpretation of feed-
forward classification network outputs, with relation-
ships to statistical pattern recognition. In Souli
´
e, F. F.
and H
´
erault, J., editors, Neurocomputing, pages 227–
236, Berlin, Heidelberg. Springer Berlin Heidelberg.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym. arXiv preprint arXiv:1606.01540.
Cao, Y., Romero, J., Olson, J. P., Degroote, M., Johnson,
P. D., Kieferov
´
a, M., Kivlichan, I. D., Menke, T.,
Peropadre, B., Sawaya, N. P. D., Sim, S., Veis, L.,
and Aspuru-Guzik, A. (2019). Quantum chemistry in
the age of quantum computing. Chemical Reviews,
119(19):10856–10915.
Cerezo, M., Arrasmith, A., Babbush, R., Benjamin, S. C.,
Endo, S., Fujii, K., McClean, J. R., Mitarai, K., Yuan,
X., Cincio, L., and Coles, P. J. (2020). Variational
quantum algorithms. Nature Reviews Physics, 3:625
– 644.
Chen, S. Y.-C. (2023). Asynchronous training of quantum
reinforcement learning.
Chen, S. Y.-C., Huang, C.-M., Hsing, C.-W., Goan, H.-S.,
and Kao, Y.-J. (2022). Variational quantum reinforce-
ment learning via evolutionary optimization. Machine
Learning: Science and Technology, 3(1):015025.
Chen, S. Y.-C., Huang, C.-M., Hsing, C.-W., and Kao, Y.-
J. (2021). An end-to-end trainable hybrid classical-
quantum classifier. Machine Learning: Science and
Technology, 2(4):045021.
Chen, S. Y.-C., Yang, C.-H. H., Qi, J., Chen, P.-Y., Ma, X.,
and Goan, H.-S. (2019). Variational quantum circuits
for deep reinforcement learning.
Quantum Advantage Actor-Critic for Reinforcement Learning
303

Dral, P. O. (2020). Quantum Chemistry in the Age of
Machine Learning. The Journal of Physical Chem-
istry Letters, 11(6):2336–2347. Publisher: American
Chemical Society.
Farhi, E., Goldstone, J., and Gutmann, S. (2014).
A Quantum Approximate Optimization Algorithm.
arXiv:1411.4028 [quant-ph]. arXiv: 1411.4028.
Farhi, E. and Harrow, A. W. (2016). Quantum supremacy
through the quantum approximate optimization algo-
rithm.
Gymlibrary, F. F. (2022). Cart pole - gym documentation.
Heimann, D., Hohenfeld, H., Wiebe, F., and Kirchner, F.
(2022). Quantum deep reinforcement learning for
robot navigation tasks.
Henderson, P., Islam, R., Bachman, P., Pineau, J., Precup,
D., and Meger, D. (2017). Deep reinforcement learn-
ing that matters.
Hsiao, J.-Y., Du, Y., Chiang, W.-Y., Hsieh, M.-H., and
Goan, H.-S. (2022). Unentangled quantum reinforce-
ment learning agents in the openai gym.
Jerbi, S., Cornelissen, A., Ozols, M., and Dunjko, V. (2022).
Quantum policy gradient algorithms.
Jerbi, S., Gyurik, C., Marshall, S. C., Briegel, H. J., and
Dunjko, V. (2021). Parametrized quantum policies for
reinforcement learning.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization.
Kober, J., Bagnell, J. A., and Peters, J. (2013). Reinforce-
ment learning in robotics: A survey. The International
Journal of Robotics Research, 32(11):1238–1274.
Konda, V. and Tsitsiklis, J. (1999). Actor-critic algo-
rithms. In Solla, S., Leen, T., and M
¨
uller, K., editors,
Advances in Neural Information Processing Systems,
volume 12. MIT Press.
Kwak, Y., Yun, W. J., Jung, S., Kim, J.-K., and Kim, J.
(2021). Introduction to quantum reinforcement learn-
ing: Theory and pennylane-based implementation.
K
¨
olle, M., Giovagnoli, A., Stein, J., Mansky, M. B., Hager,
J., and Linnhoff-Popien, C. (2023). Improving conver-
gence for quantum variational classifiers using weight
re-mapping.
Lan, Q. (2021). Variational quantum soft actor-critic.
Lockwood, O. and Si, M. (2020). Reinforcement learning
with quantum variational circuits.
Mari, A., Bromley, T. R., Izaac, J., Schuld, M., and Killo-
ran, N. (2020). Transfer learning in hybrid classical-
quantum neural networks. Quantum, 4:340.
McClean, J. R., Boixo, S., Smelyanskiy, V. N., Babbush,
R., and Neven, H. (2018). Barren plateaus in quantum
neural network training landscapes. Nature Commu-
nications, 9(1).
Meyer, N., Scherer, D. D., Plinge, A., Mutschler, C., and
Hartmann, M. J. (2022a). Quantum policy gradient
algorithm with optimized action decoding.
Meyer, N., Ufrecht, C., Periyasamy, M., Scherer, D. D.,
Plinge, A., and Mutschler, C. (2022b). A survey on
quantum reinforcement learning.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Harley,
T., Lillicrap, T. P., Silver, D., and Kavukcuoglu,
K. (2016). Asynchronous methods for deep rein-
forcement learning. In Proceedings of the 33rd In-
ternational Conference on International Conference
on Machine Learning - Volume 48, ICML’16, page
1928–1937. JMLR.org.
Nielsen, M. and Chuang, I. (2010). Quantum Computation
and Quantum Information: 10th Anniversary Edition.
Cambridge University Press.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Advances in Neural Information
Processing Systems 32, pages 8024–8035. Curran As-
sociates, Inc.
P
´
erez-Salinas, A., Cervera-Lierta, A., Gil-Fuster, E., and
Latorre, J. I. (2020). Data re-uploading for a universal
quantum classifier. Quantum, 4:226.
Pirandola, S., Andersen, U. L., Banchi, L., Berta, M.,
Bunandar, D., Colbeck, R., Englund, D., Gehring, T.,
Lupo, C., Ottaviani, C., Pereira, J. L., Razavi, M.,
Shaari, J. S., Tomamichel, M., Usenko, V. C., Vallone,
G., Villoresi, P., and Wallden, P. (2020). Advances in
quantum cryptography. Advances in Optics and Pho-
tonics, 12(4):1012.
Preskill, J. (2018). Quantum computing in the NISQ era
and beyond. Quantum, 2:79.
Schuld, M. and Petruccione, F. (2018). Supervised Learn-
ing with Quantum Computers. Springer Publishing
Company, Incorporated, 1st edition.
Sequeira, A., Santos, L. P., and Barbosa, L. S. (2022). Pol-
icy gradients using variational quantum circuits.
Shor, P. W. (1997). Polynomial-time algorithms for prime
factorization and discrete logarithms on a quantum
computer. SIAM Journal on Computing, 26(5):1484–
1509.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou,
I., Huang, A., Guez, A., Hubert, T., Baker,
L., Lai, M., Bolton, A., Chen, Y., Lillicrap,
T., Hui, F., Sifre, L., van den Driessche, G.,
Graepel, T., and Hassabis, D. (2017). Mas-
tering the game of Go without human knowl-
edge. Nature, 550(7676):354–359. Bandiera abtest:
a Cg type: Nature Research Journals Number:
7676 Primary atype: Research Publisher: Na-
ture Publishing Group Subject term: Computational
science;Computer science;Reward Subject term id:
computational-science;computer-science;reward.
Skolik, A., Jerbi, S., and Dunjko, V. (2022). Quantum
agents in the gym: a variational quantum algorithm
for deep q-learning. Quantum, 6:720.
You, Y., Pan, X., Wang, Z., and Lu, C. (2017). Virtual to
real reinforcement learning for autonomous driving.
CoRR, abs/1704.03952.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
304
