
Aquarium: A Comprehensive Framework for Exploring Predator-Prey
Dynamics Through Multi-Agent Reinforcement Learning Algorithms
Michael K
¨
olle
1
, Yannick Erpelding
1
, Fabian Ritz
1
, Thomy Phan
2
, Steffen Illium
1
and Claudia Linnhoff-Popien
1
1
Institute of Informatics, LMU Munich, Munich, Germany
2
Thomas Lord Department of Computer Science, University of Southern California, Los Angeles, U.S.A.
Keywords:
Reinforcement Learning, Multi-Agent Systems, Predator-Prey.
Abstract:
Recent advances in Multi-Agent Reinforcement Learning have prompted the modeling of intricate interactions
between agents in simulated environments. In particular, the predator-prey dynamics have captured substantial
interest and various simulations been tailored to unique requirements. To prevent further time-intensive
developments, we introduce Aquarium, a comprehensive Multi-Agent Reinforcement Learning environment
for predator-prey interaction, enabling the study of emergent behavior. Aquarium is open source and
offers a seamless integration of the PettingZoo framework, allowing a quick start with proven algorithm
implementations. It features physics-based agent movement on a two-dimensional, edge-wrapping plane.
The agent-environment interaction (observations, actions, rewards) and the environment settings (agent speed,
prey reproduction, predator starvation, and others) are fully customizable. Besides a resource-efficient
visualization, Aquarium supports to record video files, providing a visual comprehension of agent behavior. To
demonstrate the environment’s capabilities, we conduct preliminary studies which use PPO to train multiple
prey agents to evade a predator. In accordance to the literature, we find Individual Learning to result in worse
performance than Parameter Sharing, which significantly improves coordination and sample-efficiency.
1 INTRODUCTION
Reinforcement Learning (RL) has emerged as a
pivotal paradigm to train intelligent agents for
sequential decision-making tasks in many domains,
ranging from games, robotics to finance and
healthcare (Mnih et al., 2015; Silver et al., 2018;
Haarnoja et al., 2019; Vinyals et al., 2019).
The ability of RL agents to learn from interacting
with a problem and adapt their behavior to optimize
for long-term benefit positioned RL as a promising
approach to realize decision-making systems (Sutton
and Barto, 2018). Multi-Agent Reinforcement
Learning (MARL) revolves around the dynamics of
learning in the context of other agents and addresses
scenarios like collaborative robotics, social dilemmas,
and strategic games, where agent interactions are
crucial for success (Albrecht et al., 2023).
Predator-prey domains are widely used to analyze
aspects of agent cooperation, competition, adaptation,
and learning (Diz-Pita and Otero-Espinar, 2021; Li
et al., 2023). Rooted in ecological studies, this
scenario models the interaction between pursuing
predators and evasive prey, allowing to study a wide
range of technical, societal and ecological aspects of
multi agent systems. For example, one line of work
first found emergent swarming and foraging behavior
among learning prey agents (Hahn et al., 2019; Hahn
et al., 2020b) and later showed that swarming is
a nash equilibrium under certain conditions (Hahn
et al., 2020a). Subsequently, sustainable behaviour
of single learning predator agents (Ritz et al., 2020)
as well as herding and group hunting of multiple
learning predator agents was achieved (Ritz et al.,
2021). Swarming and group hunting have prevailed
at various places in nature, thus it is highly interesting
to study the emergence of such phenomena among
artificial agents.
While predator-prey scenarios are common in the
RL community, studies have mostly been conducted
in different environment implementations. Yet,
developing RL environments is time-intensive and
error-prone: abstraction and granularity have to be
balanced, a trade off between simulation precision
and computational speed has to be found, the
choice of algorithm should not be restricted and
Kölle, M., Erpelding, Y., Ritz, F., Phan, T., Illium, S. and Linnhoff-Popien, C.
Aquarium: A Comprehensive Framework for Exploring Predator-Prey Dynamics Through Multi-Agent Reinforcement Learning Algorithms.
DOI: 10.5220/0012382300003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 59-70
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
59

reproducibility has to be ensured.
Thus, we present a standardized environment for
future research on predator-prey scenarios (see Fig. 1)
that builds upon the environments used in (Hahn et al.,
2019; Hahn et al., 2020b; Hahn et al., 2020a; Ritz
et al., 2020; Ritz et al., 2021). Our implementation
offers a seamless integration of the PettingZoo
framework (Terry et al., 2021), allowing a quick start
with proven MARL algorithm implementations. As
our implementation is fully customizable, it offers
a flexible and re-usable base to efficiently explore
a variety of scenarios, e.g. regarding population
dynamics, social dilemmas, sustainability, and (self-)
organisation. Our contributions are:
1. An overview of predator-prey environments used
in the (MA)RL community.
2. A unified yet customizable environment that
covers all identified aspects and is compatible to
the proven MARL algorithm implementations of
the PettingZoo framework.
3. Preliminary experiments reproducing emergent
behaviour of learning agents and demonstrating
the scalability of modern MARL paradigms in our
environment.
Figure 1: The Multi-Agent Reinforcement Learning
Cycle (c.f. (Zhong-Yu et al., 2010)). Within the
aquarium environment of n agents, each optimizes its
policy to maximize individual rewards, while concurrently
influencing the observations and rewards of others.
Our work is structured as follows. In the following
Section 2, we describe the predator-prey scenario.
In Section 3, we review existing applications of the
predator-prey scenario to identify all key components
and concepts that are required for thorough studies.
In the subsequent Section 4, we explain how we
incorporated these components and concepts in our
Aquarium environment, which forms the basis of our
experimental framework. In Section 5, we describe
our experimental setup, and then provide and discuss
the according results in Section 6. We conclude in
Section 7 with a summary of key insights, current
limitations and suggestions for future research.
2 PREDATOR-PREY SCENARIO
Population dynamics (biomathematics) study how
single and multiple species coexist and interact in
the same habitat (Diz-Pita and Otero-Espinar, 2021).
Here, the predator-prey scenario models the dynamics
between two types of organisms: predators and prey.
Predators are organisms that hunt and consume other
organisms. Prey are organisms that try to evade and
survive. In nature, some examples are lion and zebra,
fox and rabbit, or shark and fish.
Independent of each other, Volterra and
Lotka initiated investigations on the ecological
predator-prey scenario in the 1920s (Alfred, 1925;
Volterra, 1926). Both formulated a pair of first-order
nonlinear differential equations that describe the
dynamics of predator-prey interactions within an
ecological system. These involve two primary
variables and capture the instantaneous growth rates
of both populations (prey x, predator y):
dx
dt
= α · x − β · x · y and
dy
dt
= δ · x · y − γ · y (1)
where t is the time, α is the prey reproduction rate,
β is the predation rate, δ is the predator reproduction
rate and γ is the predator mortality rate.
The system dynamics are characterized as
follows: when the predator population increases,
this exerts pressure on the prey population, leading
to a decline of available prey. As a result, the
predator population may then also decline due to
reducing food supply. With fewer predators, the
prey population can recover, initiating a new cycle of
population fluctuations, which leads to a balance in
the ecosystem.
Furthermore, the predator-prey relationship
can lead to co-evolution between the two
groups. Through continuous interactions and
adaptations, both populations may undergo reciprocal
evolutionary changes. The prey may develop
defensive mechanisms, such as camouflage, warning
signals, or toxins, to deter predation. In response,
the predators may evolve better hunting tactics,
specialized adaptations, or improved sensory
capabilities to overcome these defenses.
Understanding the predator-prey relationship is
essential for conservation efforts and sustainable
management of ecosystems. By studying and
conserving these interactions, scientists, and
ecologists can better understand the elaborate system
of intertwined life dynamics and the delicate balance
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
60

that sustains natural environments. With increasing
computational resources, predator-prey simulations
have become a common environment for Single-
and Multi-Agent RL algorithms, which has in
fact been advocated 25 years ago (Grafton and
Silva-Echenique, 1997).
3 RELATED WORK
We aim to provide a versatile RL environment with all
key features of previous research. To identify these,
we review applications of (MA-) RL to predator-prey
scenarios in the following.
The first aspect is the spatial representation.
Discrete, two-dimensional predator-prey simulations
for multi-agent systems have been around for
more than 20 years (Stone and Veloso, 2000),
sometimes also referred to as pursuit-evasion. In
discrete simulations, agent positions and movement
are restricted to grid cells. Due to their good
scalability, they are often used as a preliminary
test bed for cooperation (Gupta et al., 2017) and
resilience (Phan et al., 2021) in MARL, as well
as to study the dynamics of large populations with
up to a million agents (Yang et al., 2018). The
latter also observed the emergence of Lotka-Volterra
cylces. However, we refrain from modeling discrete
positions as such a coarse spatial representation
prevents meaningful studies on swarming behavior:
this requires precise steering to adjust orientation,
distance and alignment (Reynolds, 1999). To enable
agents to move accordingly, a continuous spatial
model is required.
The next key aspect is the number of dimensions.
Modeling three-dimensions (Berlinger et al., 2021)
comes at the cost of increased mathematical and
conceptual complexity. In fact, a continuous,
two-dimensional, edge-wrapping plane has been
shown shown to be sufficient to study complex agent
interactions: By training prey with the RL algorithms
DQN and DDPG to survive as long as possible, (Hahn
et al., 2019) observed the emergence of flocking
behavior in the presence of predators as described by
(Reynolds, 1987). Follow-up research by (Hahn et al.,
2020a) showed that swarming can be a sub-optimal
Nash equilibrium in predator-prey scenarios and
illustrated how (not) forming a swarm puts the
prey into a social dilemma, demonstrating that two
dimensions are sufficient to explore the complexity
of the interplay between individual and collective
behaviors in swarming dynamics. In a simulation
with similar characteristics, (H
¨
uttenrauch et al., 2019)
propose a MARL variant of the RL algorithm DDPG.
Their agents communicate in local neighborhoods,
e.g. to exchange information about targets to be
localized, and use an efficient representation of local
observations to improve scaling.
Despite a suitable spatial representation, the
aforementioned environments do not consider
collisions and allow agents to overlap, which is
the third key aspect. Missing collisions make it
unnecessary for prey agents to keep distance to each
other and greatly simplifies to escape from predators.
The work of (Ritz et al., 2020) added elastic collisions
and a moment of inertia to the environment of (Hahn
et al., 2019) and trained an RL predator to capture
prey. In a two-phase training approach, the predator
adapted towards a balanced strategy to preserve the
prey population. Subsequently, (Ritz et al., 2021)
found multiple learning predators to learn sustainable
and cooperative behavior amid challenges such as
starvation pressure and a tragedy of the commons.
Environment parameters such as edge-wrapping,
agent speed, or the observation radius to significantly
impacted their results.
Another line of research uses a two-dimensional
plane with collision physics and additional
obstacles: (Mordatch and Abbeel, 2018) study
the emergence of communication amongst learning
agents and (Lowe et al., 2017) propose the MARL
algorithm MADDPG, which achieves significantly
better results than purely decentralized actor-critic
algorithms. This suggests that communication
and organization are easier to learn centrally when
scenarios require coordination. However, their
environment lacks edge-wrapping. This allows
agents to (theoretically) move to infinity and for
practical reasons, agents need to be stopped from
doing so. Thus, the concept of landmarks to which
agents shall (always) navigate to is used, which limits
the applicability to study swarm behavior.
However, all aforementioned environments
lack one key feature that has received little
attention in simulations so far but could have
significant impact on the preys’ formation and the
predators’ hunting: agent Field of View (FOV) (see
Section 4.1.3). This would allow to study the Many
Eyes Hypothesis (Olson Randal S. and Christoph,
2015) with RL.
In summary, a unified environment should
1. enable continuous agent navigation in a
unbounded 2D plane through edge-wrapping
similar to (Hahn et al., 2019),
2. use a thorough physics model, e.g. with a
moment of inertia and collisions between agents
and obstacles, similar to (Lowe et al., 2017; Ritz
et al., 2020),
Aquarium: A Comprehensive Framework for Exploring Predator-Prey Dynamics Through Multi-Agent Reinforcement Learning Algorithms
61
3. allow a flexible environment parameterization
similar to (Ritz et al., 2021) and
4. model agent FOV.
We realize all these key aspects in our Aquarium
environment, which we describe in the following.
4 AQUARIUM
We introduce Aquarium, a comprehensive and
flexible environment for MARL research in
predator-prey scenarios. By making key parameters
accessible, we support for the examination of a
wide array of research questions. Our goal is to
eliminate the necessity for researchers to rebuild
basic dynamics, which is often a significantly
time-consuming task, thereby affording more
opportunities for the methodical analysis of relevant
factors. Moreover, employing a unified simulation
platform eases the reproduction of previous results
and strengthens the reliability of performance
comparisons between different methodologies via a
stable foundation. To include the collective effort
put into existing RL libraries, we implement the
PettingZoo interface (Terry et al., 2021), which
enables out-of-the-box support for CleanRL,
Tianshou, Ray RLlib, LangChain, Stable-Baselines3,
and others. The project is open-source, distributed
under the MIT license, and available as a package on
PyPI
1
.
4.1 Dynamics and Perception
The agents in our environment traverse a continuous
two-dimensional toroidal space, enabling seamless
movement across its boundaries (Fig. 2a). Detailed
computations for this toroidal configuration are
explored in the following sections.
The environment supports multiple instances of
two agent types: prey, visually represented as
fish, and predators, visually represented as sharks.
The actual position of agents is marked by central
point within these representations. Prey agents can
replicate after a specified survival duration, with the
process capped upon reaching a predefined maximum
prey count. An episode terminates either after a
predetermined number of time steps or when all
agents of one type are eliminated, with predators
also susceptible to starvation after a set number of
unsuccessful hunting steps. Agents are characterized
by attributes like mass, position, velocity, and
acceleration, and utilize essential vectors, namely
1
https://github.com/michaelkoelle/marl-aquarium
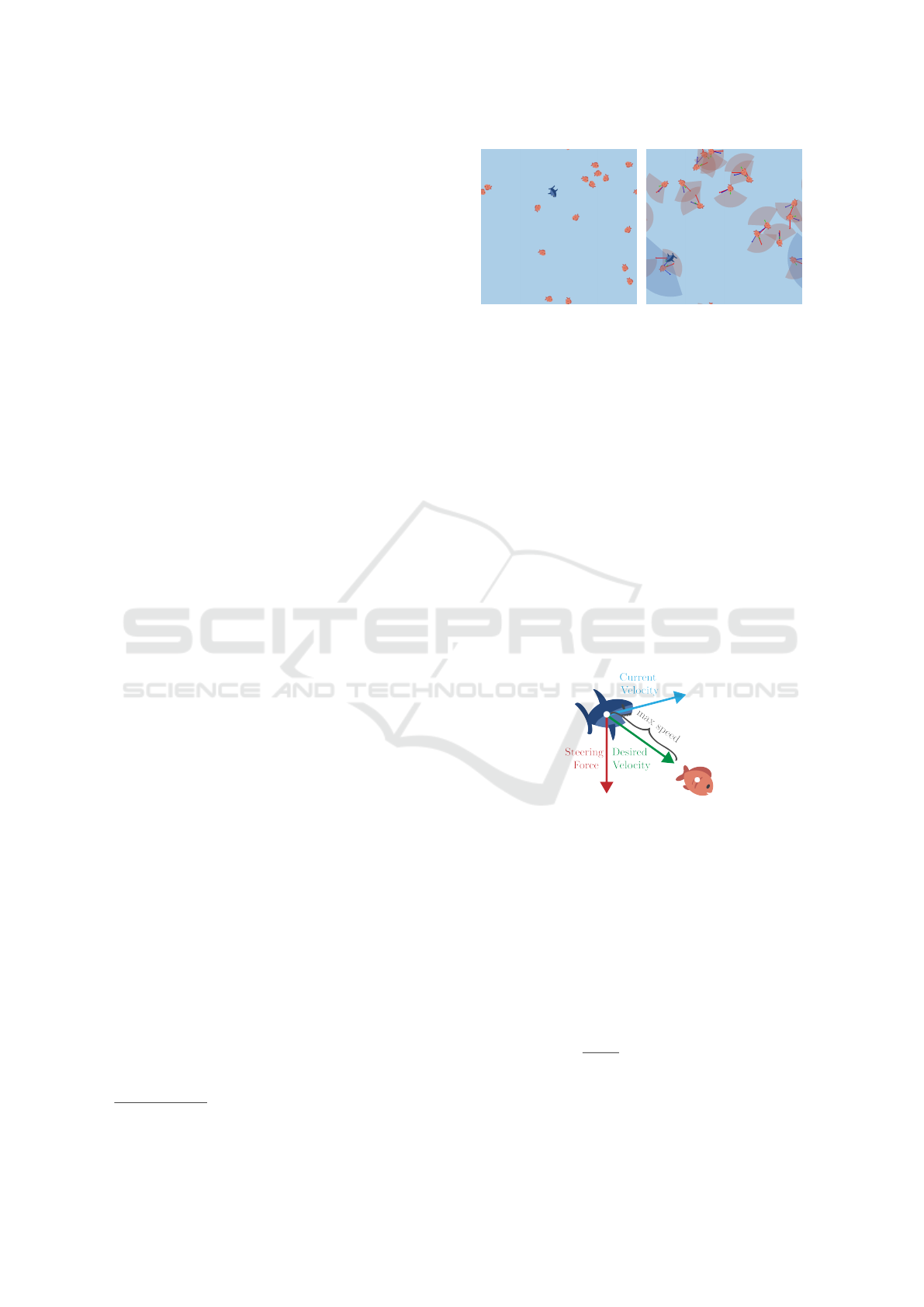
(a) Simple Visualization. (b) Visualization Including
Force Vectors and Cones.
Figure 2: Examples of the Aquarium With 16 Prey (Fishes)
and One Predator (Shark) Agent.
position, velocity, and acceleration vectors, for
navigation.
4.1.1 Movement
In the context of a predator-prey scenario, an agent’s
primary objective involves initiating a directional
movement, which necessitates the manipulation of
its velocity through the application of forces. At
each time step, a steering mechanism, derived from
the algorithm of (Reynolds, 1999), is employed to
guide the agent towards a designated position within
the environment (Fig. 3). This adaptation aligns the
agent, for instance, a predator, and its velocity is
radially aligned towards its designated target, a prey.
Figure 3: Calculation of the Steering Force. A limited
fraction of the steering force is applied to smoothly
transition from the current to the desired velocity, which is
capped by the agent’s maximum speed.
The desired velocity D, a vector pointing from
the agent to the target, is constrained in magnitude
by the agent’s maximum attainable speed s ∈ R. The
steering vector F is the difference between the desired
velocity D and the agent’s current velocity V and is
limited by the agent’s maximum steering force f ∈ R
(Eq. 2).
F =
(
D −V if kD −V k ≤ f
D−V
kD−V k
· f otherwise
(2)
After the calculation of the steering force, the
agent’s new acceleration vector A
0
is calculated using
the agent’s current acceleration vector A, the steering
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
62

force F, the agent’s mass m ∈ N, and the maximum
magnitude k ∈ R of the final acceleration vector
(Eq. 3).
A
0
=
A +
F
m
kA +
F
m
k
· k, (3)
The new acceleration vector A
0
is then added to
the agent’s current velocity vector V to compute the
new velocity vector V
0
, which is then limited by the
agent’s maximum speed s.
V
0
=
(
V + A
0
if kV + A
0
k ≤ s
V +A
0
kV +A
0
k
· s otherwise
(4)
To ultimately change the agent’s position, the new
velocity vector V
0
is added to the agent’s position
vector P (Eq. 5).
P
0
= P +V
0
(5)
To increase the flexibility of the environment, the
maximum magnitudes of the desired velocity s, the
steering force f , and the acceleration vector k can be
manipulated, independently of the agent type.
4.1.2 Collisions
As a predator-prey setting consists of predators trying
to capture their prey, interactions between agents are
enabled in this environment. Every agent is equipped
with a circular hitbox of a predetermined radius r ∈
R around the agent’s center. Detecting collisions
between two agents A and B involves calculating the
distance between them using their positional vectors
P
A
and P
B
. If the computed distance d is smaller than
the the sum of the radii of both agents, i.e. d < r
A
+r
B
,
agents A and B have collided.
When a predator collides with a prey, the prey
is considered captured and can be immediately
respawned at a random position within the
environment if configured. This ensures a constant
number of prey throughout the entire episode. On
the other hand, if two agents of the same type collide
with each other, they bounce back in the opposite
directions of the other agent. Following a collision,
the new velocity V
0
A
of agent A is calculated using its
current velocity V
A
and the positional vectors of both
agents A and B (Eq. 6). The new velocity V
0
B
of agent
B is determined analogously.
V
0
A
= V
A
+
P
B
− P
A
kP
B
− P
A
k
(6)
4.1.3 Vision
In an agent-based system, the actions of an agent
are influenced by the information it perceives from
its environment. Therefore, it is crucial to precisely
define what the agent can see. In the default setup of
this environment, each agent has complete visibility
of all other agents, implying that it knows the exact
positions of every agent. However, for a more realistic
simulation, we can impose restrictions on the agent’s
view, rendering the environment partially observed. A
widely-used approach involves establishing a limited
viewing distance, and thus creating a circular vision
field around the agent. Consequently, the agent
can only perceive other agents situated within this
predetermined viewing distance.
Figure 4: Angle and Distance Criteria. An agent is
considered within the field of view only if both conditions
are met: staying within a defined angular range, α (left),
and not exceeding a specified distance, v (middle). Both
conditions are fulfilled (right).
To further refine the agent’s perception, we
introduce a restriction, known as the FOV constraint,
within the agent’s frontal direction (Fig. 2b). This
entails that an agent A is only capable of seeing
other agents positioned within a specific angular
range α in front of it, at a defined distance. As
illustrated in Fig. 4, the determination of an agent’s
inclusion within its FOV involves fulfilling two
specific conditions (Eq. 7).
β ≤
α
2
∧ d ≤ v (7)
Firstly, the angle β formed between the agent’s
current velocity vector V and the desired velocity
D must be smaller than α. Secondly, the distance
d separating the two agents must be shorter than
the agent’s designated viewing distance v. To
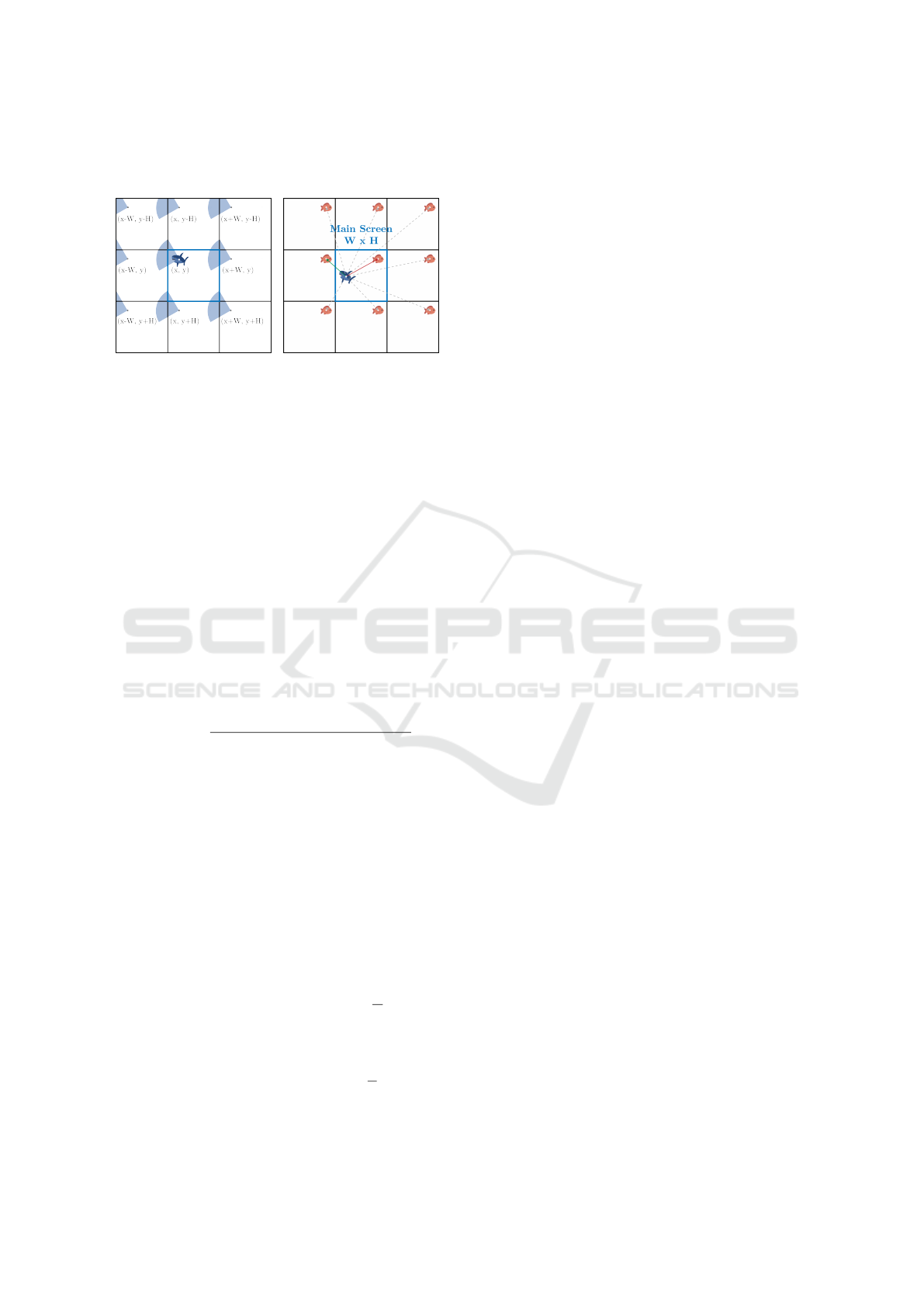
account for agents wrapping around the boundaries,
the FOV is duplicated eight times, each instance
situated at distinct locations, as depicted in Fig. 5a.
Note that this approach may not be the most
efficient approach and there remains the potential
for future enhancements. The values for the agent’s
designated viewing distance v and FOV angle α can
Aquarium: A Comprehensive Framework for Exploring Predator-Prey Dynamics Through Multi-Agent Reinforcement Learning Algorithms
63
be independently adjusted for each agent type in this
environment.
(a) Field of View. (b) Distances Between
Agents.
Figure 5: Distance and Field of View Calculation in a Torus.
4.1.4 Distance
In a toroidal environment, determining the shortest
distance between two positions becomes intricate due
to the multiple boundary-crossing paths. Unlike a
bounded two-dimensional plane, which has a singular
distance between points, a torus offers numerous
direct paths, some of which may be shorter than
conventional distances, as depicted in Fig. 5b. Our
primary objective is to find the shortest of these paths.
Instead of computing all potential distances and
choosing the smallest, we initially assess the standard
Euclidean distance within screen space, followed by
conditional adjustments based on the environment’s
width (W ∈ N) and height (H ∈ N). Thus, the distance
d between two positions A and B can be calculated as:
d(A, B) =
v
u
u
t
min(|x
A
− x
B
|,W − |x
A
− x
B
|)
2
+
min(|y
A
− y
B
|, H − |y
A
− y
B
|)
2
(8)
4.1.5 Direction Vector
To obtain the direction from one point to another in
the form of a vector, we introduce two points, A and
B, representing the initial position and destination.
Additionally, let W ∈ N and H ∈ N be the width and
height of the environment. The directional vector is
required for the heuristics described in Section 5.2.
We define the directional vector D with D(A, B) =
(x
D
, y
D
), where
x
D
=
(
x
a
− x
b
, if |x
b
− x
a
| >
W
2
x
b
− x
a
, otherwise
where
y
D
=
(
y
a
− y
b
, if |y
b
− y
a
| >
H
2
y
b
− y
a
, otherwise
.
(9)
4.2 Agent-Environment Interaction
In our modeled ecosystem, the relationship
between agents and their environment is crucial
for comprehending and influencing predator-prey
interactions. Utilizing the Markov Decision Processes
framework, we divide the agent behaviors into three
key components: observations, actions, and rewards,
each of which will be elaborated in the following
subsections. It is imperative to note that since our
environment operates in a deterministic manner, all
transition probabilities are equal to one.
4.2.1 Observations
The environment is partially observable and therefore
observations constitute only a subset of the overall
state of the environment. Both types of agents
can possess different observation spaces that can be
manipulated through varying configurations. The
environment offers the flexibility to use an FOV
mechanism characterized by predefined parameters
encompassing view distance and angle, as described
in Section 4.1.3. Furthermore, a restriction
can be imposed on the number of neighboring
agents that an agent can perceive. For instance,
predators can be restricted to perceive a maximum
of three prey agents. Through this modular
approach to managing agent observations, the
environment provides maximal customizability and
reduces coupling between components, enabling the
simulations to be more readily adapted to novel
research needs.
Under the standard observation configuration,
an observing agent o receives a 6-tuple of each
neighboring agent e, encompassing the neighboring
agent’s type, position, distance, orientation, and
speed (Fig. 6). The position is represented
in terms of polar coordinates relative to the
observer, whereas distance, orientation, and speed are
characterized by continuous numerical values. Given
the environment’s toroidal structure, the shortest
euclidean distance to the neighboring agent is taken,
as described in Section 4.1.4. An agent’s orientation
is quantified in degrees within the range of [0
◦
, 360
◦
),
while the speed is constrained by the maximum speed
an agent can have.
Consequently, each observer receives this
observation tuple for itself and the b nearest
neighboring agents with b representing the upper
limit of perceivable neighboring agents. All
information is encapsulated within an ordered vector
of constant length, restricted by the value of b, and
within which the b neighbors are ordered based on
their respective distance. In scenarios, where an
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
64
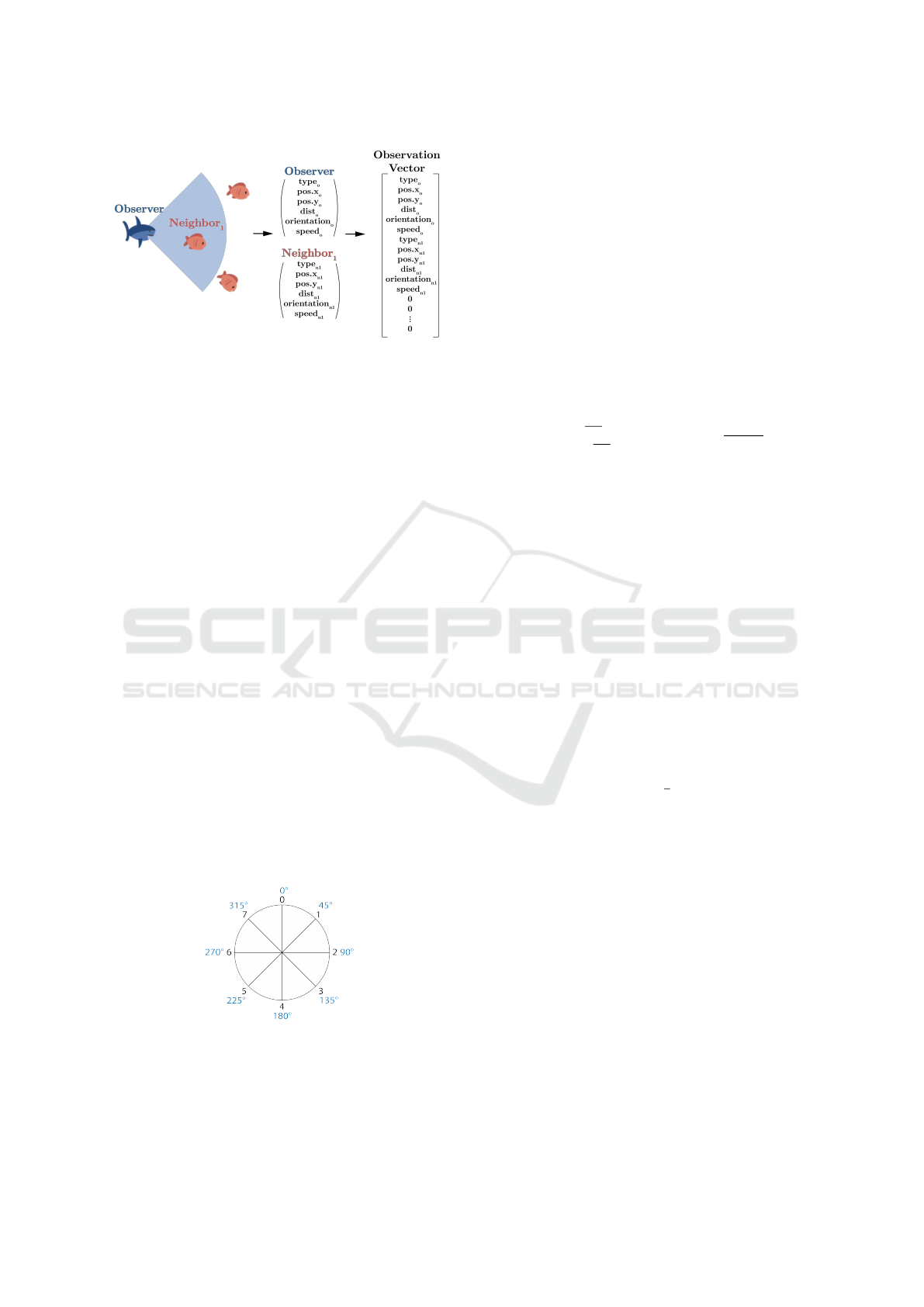
Figure 6: Construction of the Observation Vector. The
observation vector is an ordered vector containing 6-tuples
for the observer and the b nearest neighboring agents, with
b designating the upper limit of observable neighboring
agents.
agent’s perceptual field yields fewer neighboring
agents than the defined maximum b, the vector length
is preserved by zero padding. Subsequently, this
vector undergoes a rescaling procedure to fit within
a range spanning from 0 to 1 or alternatively, -1 to
1, depending on the context. This transformation
into a vectorized format empowers the interpretation
of observations by the RL algorithm, enhancing its
ability to process the information effectively.
4.2.2 Actions
The environment uses distinct modular functions
to execute agent actions. This facilitates the
customization of independent action spaces for
both predators and prey, aligning with the specific
requirements of research objectives. In pursuit
of broad applicability, the action space within the
environment is designed to be compatible with
a variety of agent models, including machine
learning algorithms, random actions, and static
algorithms. Regardless of the specific control logic,
all agents share the same defined action space,
delineating the permissible movement options within
the environment.
Figure 7: Illustration of the Action Space. Agents select
actions from a discrete set of integers, each representing
a specific direction. For example, in this 8-option action
space, choosing 2 indicates an intent to move east.
Within this environment, a discrete action space
is utilized, wherein action choices are encoded as
integers that correspond to particular directional
movements that agents can solicit. For instance, if the
action space encompasses eight possible choices, as
depicted in Fig. 7, an action a of value 0 symbolizes
an intention to advance northward, while a value
of 1 could denote a northeastern movement, and so
forth. These designated directions are subsequently
translated into degrees to calculate the desired
velocity that dictates the intended agent movement.
To turn an action a from an agent’s model into an
angle of degrees γ, Eq. 10 is applied, with n being
the number of actions and desired velocity vector D is
then calculated accordingly.
D =
sin(γ ·
π
180
)
−cos(γ ·
π
180
)
where γ =
360 · a
n
(10)
The method by which the desired velocity
influences the agent’s movement is detailed in
Section 4.1.1.
4.2.3 Rewards
Rewards serve as the primary feedback signal
enabling RL algorithms to improve agents’ policies.
In our configuration, the predator agent receives
solely a predefined reward for catching a prey agent,
modeling the goal of hunting success. Every other
state is classified as neutral, providing neither reward
nor punishment, which ensures that no behavioral
bias is introduced. In environments featuring multiple
predators, the predefined reward r received upon
catching a prey can be divided. When there are n
predators located within a shared catch zone of a
predetermined radius from the prey location, each
predator receives a reward of
r
n
.
The goal of the prey is to not collide with a
predator and to survive as long as possible. For
this, they receive a positive predetermined reward for
each time step survived and another negative specified
reward for the collision with a predator which ends
their life.
The reward structure for the predator agents was
adapted from (Ritz et al., 2021), while the reward
structure for the prey agents was inspired by the
concepts introduced by (Hahn et al., 2019). While
the existing setup of the environment relies on
these predetermined reward frameworks, it’s worth
noting that the environment incorporates modular
functionalities that enable easy modifications to the
established reward system.
Aquarium: A Comprehensive Framework for Exploring Predator-Prey Dynamics Through Multi-Agent Reinforcement Learning Algorithms
65

4.3 Limitations
Despite the environment’s adaptability to a variety
of scenarios, we sacrifice generality in favor
of simplicity by using a two-dimensional plane.
This limits the scope of applications: in nature,
predator-prey interactions generally occur in a
three-dimensional context. Also, most UAV scenarios
require a third degree of freedom (altitude). During
the time of writing, the environment lacks metrics for
cohesion, flocking, and other collective phenomena
inherent to predator-prey settings, which we plan to
add in future releases. Also, the environment size is
bound by the simulation efficiency, which we plan to
improve by optimizing vector operations and the FOV
mechanic.
5 EXPERIMENTAL SETUP
We demonstrate the potential of the Aquarium
environment as a suitable predator-prey scenario for
MARL by resembling typical research setups found
in related work. We follow the experimental setup
of (Hahn et al., 2019), where multiple prey are
trained with RL to escape a predator that is guided
by a heuristic called NaivChase. Aquarium used
the default values for all parameters which can be
found in the provided repository. In the following,
we describe how we train the prey, which baselines
we use and which metrics we choose to evaluate the
performance.
5.1 RL Algorithm
We train our prey agents with the RL algorithm
Proximal Policy Optimization (PPO) (Schulman
et al., 2017) using the Generalized Advantage
Estimation (GAE). The hyper-parameters are outlined
in Table 1. We conducted two experiments using an
identical parameterization for environment and RL
algorithm. In the first experiment, we use the MARL
paradigm Individual Learning (IL) to train the prey
agents (de Witt et al., 2020). Here, each agent trains
an individual policy with its own experiences. In
the second experiment, we use Parameter Sharing
(PS). Here, all agents share the parameters of one
policy. Hence, the prey agents learn from experience
collected collectively. For this experiment, the batch
size was proportionally reduced by dividing it by
the count of agents. For IL and PS, training was
performed for 4000 episodes, each lasting 3000 time
steps with five different seeds.
Table 1: PPO Hyper-Parameters. These hyper-parameters
were used for training the prey agents in an environment
including a single predator agent.
Parameter Data Type Value
Discount Factor Float 0.99
Batch Size Integer 2048
Clipping Range Float 0.1
GAE Lambda Float 0.95
Entropy Weight Float 0.001
Actor Alpha Float 0.001
Critic Alpha Float 0.003
5.2 Baselines
To asses the trained RL policies, we implemented
several heuristic baselines.
The Random heuristic operates by selecting
actions in an arbitrary manner, devoid of any strategic
consideration or learning process. This represents an
untrained agent and any training should result in a
significant improvement.
The Static heuristic is a different set of rules for
predator and prey agents. In case of prey agents,
the heuristic applies the rules of the TurnAway
algorithm reported by (Hahn et al., 2019), where
agents turn 180° away from the predator. This
involves computing the directional vector from the
prey to the predator (see Section 4.1.5), inverting it
and converting it into an angle. Then, this angle is
mapped to an action within the action space (Fig. 7).
In case of predator agents, the heuristic applies the
rules of the NaivChase algorithm reported by (Hahn
et al., 2019). It determines the direction vector from
the predator to the closest prey and converts it into an
action. If a predator has multiple prey within its FOV,
it arbitrarily selects one prey to pursue at each time
step, modelling confusion.
5.3 Metrics
To measure the learning success and analyze the
population dynamics, our framework provides two
pivotal metrics.
Rewards is the undiscounted sum of all rewards
collected per episode. This metric measures how well
an agent is doing on the long run. It does not have
to be normalized since the episode length is constant.
Predator agents are rewarded for capturing prey and
prey agents are rewarded for surviving, Higher values
indicate better performance.
Captures is the sum of captured prey per episode.
It measures the success of predators agents catching
prey (from this point of view, higher values are better)
and the success of prey agents evading the predators
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
66
(from this point of view, lower values are better). Prey
agents reappear after being caught to keep the episode
length constant.
6 RESULTS
The following section encompasses the outcomes
of the two experiments elucidated in Section 5.1.
Initially, the efficacy of the training approach
wherein individual agents possess distinct policies
is juxtaposed with the baseline models described in
Section 6.1. Subsequently, a comparison between
the two experiments employing distinct training
strategies is presented in Section 6.2. The trained
policies were executed across 200 episodes, each
consisting of 3000 time steps, using five distinct
seeds in an environment featuring a single predator
governed by the NaivChase heuristic. The same
protocol was followed for the baseline models.
During these runs, both undiscounted rewards and
captures per episode were collected for each prey
agent to compare the different models on their
evading performance. The results of the different
seeds were summarized by averaging the respective
metrics.
6.1 Individual Learning
To recapitulate, each prey agent developed its own
distinct policy through dedicated training, ensuring
that their policy’s learning process exclusively
derived from their unique set of experiences. Our
aim is to replicate the findings observed in the
study conducted by (Hahn et al., 2019). While
we did not integrate a specific metric to assess the
extent of prey cooperation, such as swarming, we
anticipate discovering that the fish learn to enhance
their survival by maintaining a distance from the
predator. Nevertheless, we do not anticipate the
prey agent to embrace the action of executing a 180
◦
turn away from the predator, as performed by the
TurnAway heuristic.
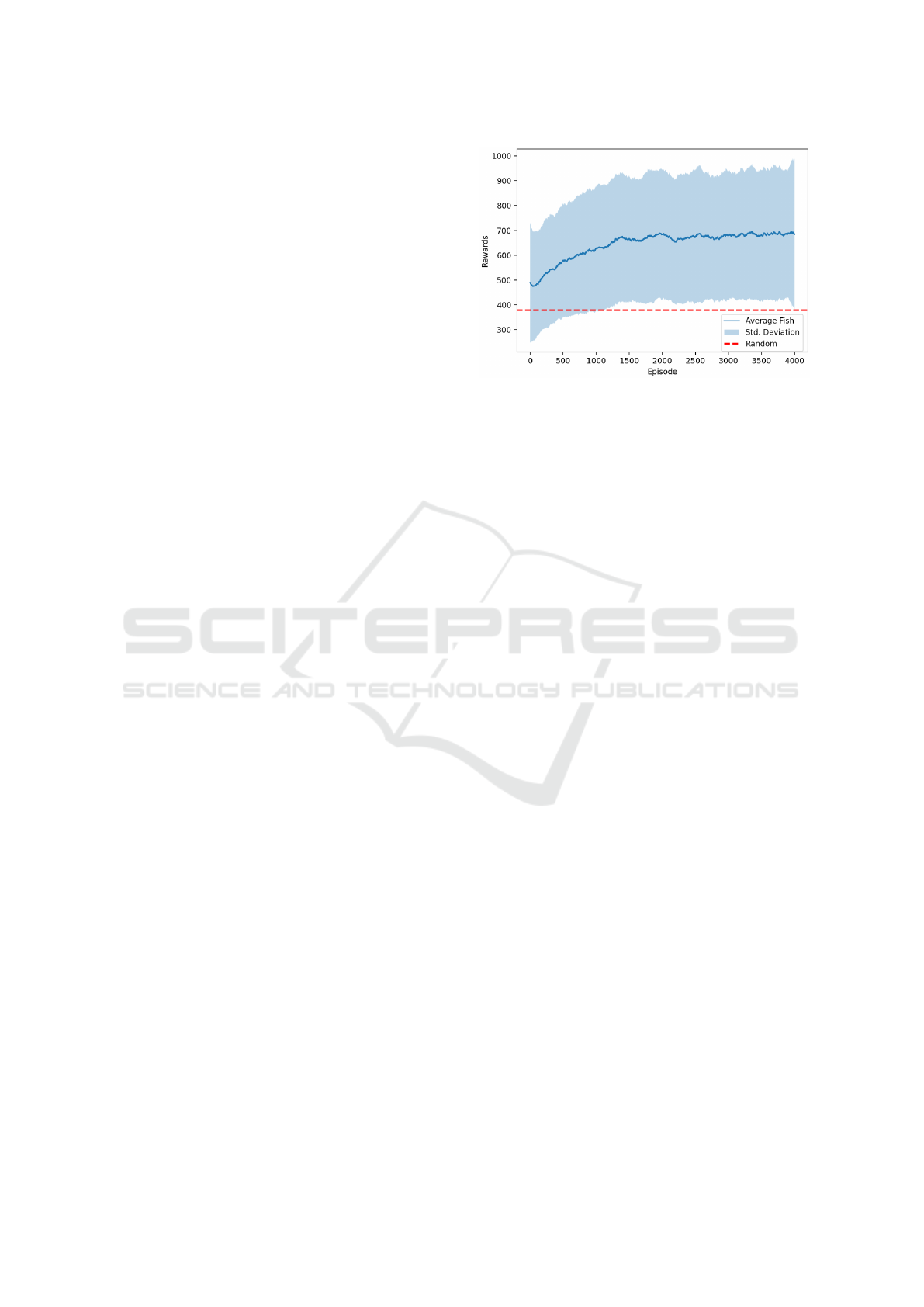
First, we examined the rewards and capture per
episode during the training process. Initially, the
policy’s average rewards, calculated over all prey
agents, closely align with that of the random policy,
as illustrated in Fig. 8. Subsequently, there is a
rapid growth in reward, and after approximately 2000
episodes the increase becomes gradual. The standard
deviation reveals a pronounced dispersion of rewards
across the entire training.
Upon examining the captures per episode, a
similar trend becomes apparent. Initially, the
Figure 8: Average Reward per Prey Agent Using the
Individual Training Strategy. Training was performed for
4000 episodes, each lasting 3000 time steps. The prey
agents were individually trained, such that each agent is
equipped with its unique policy and exclusively learns from
its own experiences. The individual rewards over the six
prey agents were averaged for each episode and the standard
deviation was calculated. The red dotted line represents
the average reward achieved overall episodes with random
behavior.
policy’s capture outcomes closely resemble those
of the random policy. Nonetheless, these captures
undergo a substantial decline until around episode
2000. After this point, the capture rate demonstrates
only a slight additional reduction. Once more,
the standard deviation exhibits notable elevation,
suggesting considerable variability across episodes
regarding the frequency of prey capture events by the
predator.
When comparing the behavior of the prey
agents using the learned policies to the behavior
of those being based on two baselines model,
observed across a span of 200 episodes, it
becomes evident that the TurnAway heuristic has
pronounced effectiveness, yielding notably higher
average rewards in comparison to both the random
and trained prey models. Nonetheless, it is imperative
to acknowledge that the trained policy consistently
maintains superior performance over the random
policy in relation to the specified reward metric.
Upon evaluating the captures per episode across
the three models, the prey subjected to the trained
policy exhibited an average capture frequency of
approximately five times per episode (Fig. 9). In
contrast, the prey, under the influence of the static
algorithm, experienced a notably lower capture rate,
with fewer than one capture per episode on average.
This underscores the effectiveness of the static
algorithm in countering the predator with similar
control.
The trained prey agents exhibited a slight
tendency to move in a direction opposite to that
Aquarium: A Comprehensive Framework for Exploring Predator-Prey Dynamics Through Multi-Agent Reinforcement Learning Algorithms
67
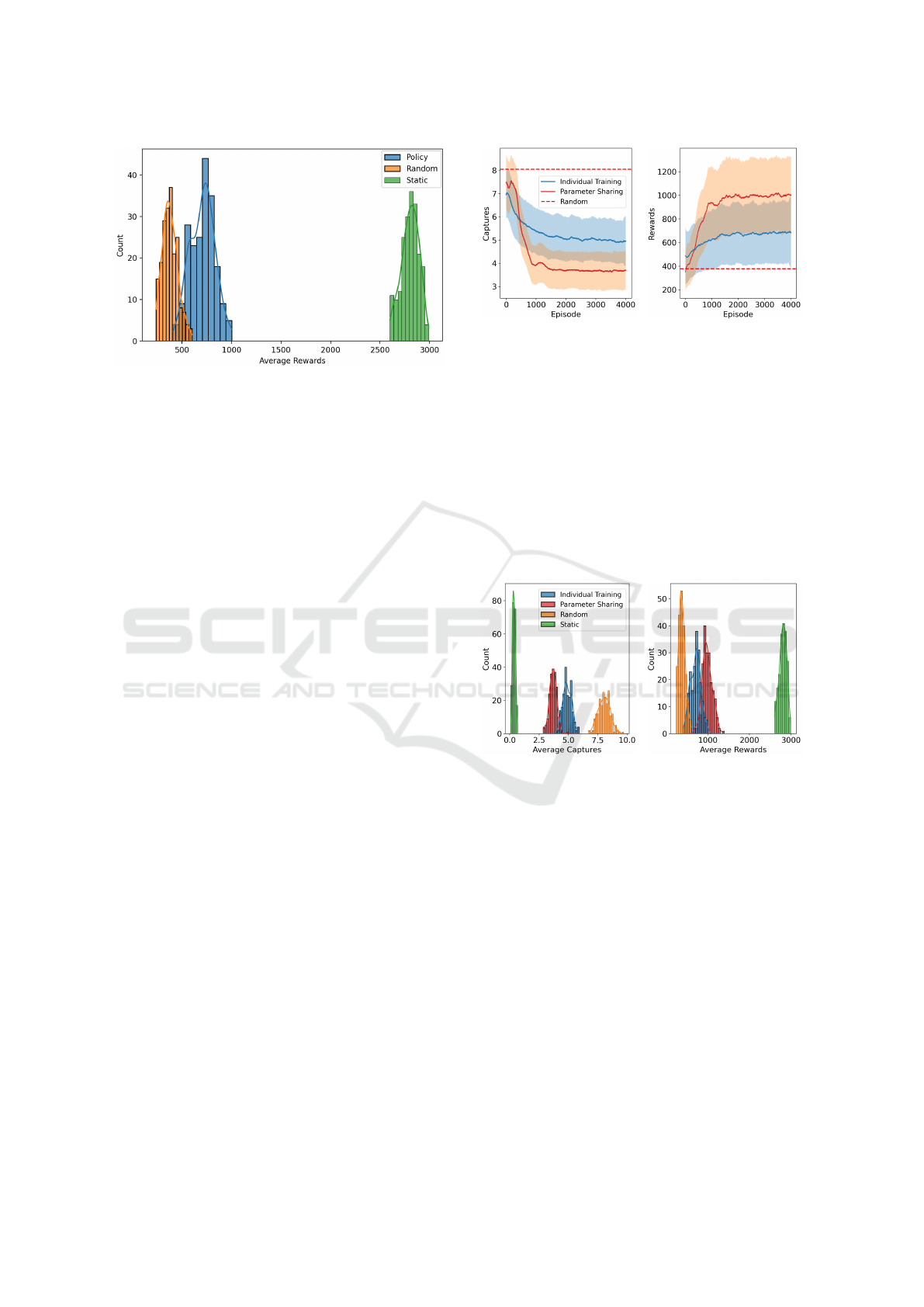
Figure 9: Distribution of the preys’ average rewards in a
scenario with one predator. We compared the trained RL
prey agent (blue) against the Random heuristic (orange) and
the TurnAway heuristic (green) across five differnent seeds.
of the predator. However, their effectiveness in
executing this evasion behavior remained limited, as
they persisted in directly engaging in actions aimed
at the predator. This choice of action resulted in a
substantial number of captures for the prey, indicating
that the evasion strategy is not highly successful in
preventing capture incidents.
Overall, the prey agents individually trained using
the PPO technique exhibit a marginal improvement
over random movement patterns. However, their
performance remained notably inferior when
contrasted with the efficacy demonstrated by the
TurnAway heuristic. This observation aligns closely
with the findings of (Hahn et al., 2019), albeit
with the distinction that a more comprehensive set
of metrics is required to comprehensively assess
complex behaviors such as swarming.
6.2 Parameter Sharing
Utilizing parameter sharing among prey agents, as
discussed in Section 5.1, means that each agent
benefits from the collective experiences of the
group, learning from a single policy source. This
approach is expected to accelerate the learning rate,
potentially leading to cooperative behaviors or swarm
formations, confusing the predator ((Hahn et al.,
2019)). Our preliminary results suggest enhanced
survival rates for prey, as they strategically maintain
distance from predators, indicated by the rapid
decline in captures per episode (Fig. 10a) and the
parallel increase in rewards (Fig. 10b).
Additionally, the prey employing the parameter
sharing approach demonstrate markedly improved
post-training performance, aligning with our initial
anticipation of accelerated learning. The prey
subjected to parameter sharing training outperform
(a) Average Captures Over
Prey Agents.
(b) Average Rewards Over
Prey Agents.
Figure 10: Average captures and rewards per prey agent.
We compare individual learning (blue) against parameter
sharing (red). Training was performed for 4000 episodes,
each lasting 3000 time steps. The metrics are averaged over
six prey agents and five distinct seeds per episode. The
shaded areas represent the respective standard deviation.
the random agents, exhibiting reduced capture rates
and superior rewards compared to the individually
trained prey (Fig. 11). Nevertheless, the performance
of prey governed by the TurnAway heuristic still
surpasses that of the other models.
(a) Average Captures Over
Prey Agents.
(b) Average Rewards Over
Prey Agents.
Figure 11: Distributions of the Average Captures and
Rewards Comparing Both Training Strategies. The
trained policies, individual training (blue) and training
with parameter sharing, the random heuristic (orange), and
the TurnAway heuristic (green) were executed across 200
episodes, each consisting of 3000 time steps, using five
distinct seeds in an environment featuring a single predator
governed by the NaivChase heuristic.
Upon examining the recorded video of one
episode of the environment consisting of prey agents
trained using parameter sharing, we noticed that the
policy guides all agents to consistently swim in the
same direction. The progress of this phenomenon
becomes evident during training. Fig. 12 showcases
five distinct images captured at various time steps
throughout the training process. This observation
was unexpected, as this straightforward behavior of
maintaining uniform direction appears primitive in
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
68

attempting to evade the predator. However, it can
be deduced that the PPO algorithm converged to a
local optimum. Remarkably, this aligns with the
adoption of the alignment rule of swarm behavior,
as elucidated in (Reynolds, 1987), which ultimately
granted them an advantage over the individually
trained, self-centered prey agents.
Figure 12: Illustration of Directional Movement Evolution
of Prey Agents Using Training With Parameter Sharing.
Training was performed for 600 episodes, each lasting 3000
time steps. A single policy was trained collectively based on
the observations of all prey agents. To illustrate the behavior
of the prey agents, five screenshots at an interval of 100
episodes were recorded.
7 CONCLUSION
In this work, we introduced Aquarium, a
comprehensive and flexible MARL environment
that models predator-prey interaction. By providing
an overview of existing predator-prey environments,
we identified key aspects required by the (MA)RL
community. Based on that, we provide a customizable
implementation that covers all identified aspects and
is compatible to the proven MARL algorithm
implementations of the PettingZoo framework (Terry
et al., 2021). In preliminary experiments, we
reproduced emergent behaviour of learning agents
and demonstrated the scalability of modern MARL
paradigms in our environment.
Future prospects can be divided into
three categories: improving the environment
implementation, adding further features and
conducting comprehensive experiments. Regarding
the environment implementation, we hope to reduce
the computational footprint in various aspects, such
as optimizing vector operations and streamlining
computations required for the utilization of the
FOV mechanism. In particular, the integration of
ray tracing techniques (Kuchkuda, 1988) has the
potential to substantially improve performance. We
believe that the pivotal expansion of the environment
to accommodate a larger number of agents is
imperative for the in-depth analysis of swarm
behavior. Regarding additional features, we plan to
add vector flow fields (Reynolds, 1999) that simulate
water flow or wind. This would allow to investigate
how agents behave in presence of external forces.
Regarding experiments, we plan to replicate group
hunting as reported by (Ritz et al., 2021) and explore
the (optional) FOV mechanism, e.g. to test the Many
Eye Hypothesis (Olson Randal S. and Christoph,
2015) which has not received much attention yet.
Ultimately, we hope for the community to adopt our
environment and provide feedback on deficiencies
we may have overlooked.
ACKNOWLEDGEMENTS
This work is part of the Munich Quantum Valley,
which is supported by the Bavarian state government
with funds from the Hightech Agenda Bayern Plus.
REFERENCES
Albrecht, S. V., Christianos, F., and Sch
¨
afer, L. (2023).
Multi-Agent Reinforcement Learning: Foundations
and Modern Approaches. MIT Press.
Alfred, L. (1925). Elements of Physical Biology. Nature,
116(2917):461–461.
Berlinger, F., Gauci, M., and Nagpal, R. (2021). Implicit
coordination for 3d underwater collective behaviors
in a fish-inspired robot swarm. Science Robotics,
6(50):eabd8668.
de Witt, C. S., Gupta, T., Makoviichuk, D., Makoviychuk,
V., Torr, P. H. S., Sun, M., and Whiteson, S.
(2020). Is independent learning all you need in
the starcraft multi-agent challenge? arxiv preprint,
abs/2011.09533.
Diz-Pita, E. and Otero-Espinar, M. V. (2021).
Predator–Prey Models: A Review of Some Recent
Advances. Mathematics, 9(15):1783.
Grafton, R. Q. and Silva-Echenique, J. (1997). How
to Manage Nature? Strategies, Predator-Prey
Models, and Chaos. Marine Resource Economics,
12(2):127–143.
Gupta, J. K., Egorov, M., and Kochenderfer, M.
(2017). Cooperative multi-agent control using deep
reinforcement learning. In Autonomous Agents
and Multiagent Systems, pages 66–83. Springer
International.
Haarnoja, T., Ha, S., Zhou, A., Tan, J., Tucker, G.,
and Levine, S. (2019). Learning to walk via deep
reinforcement learning.
Hahn, C., Phan, T., Feld, S., Roch, C., Ritz, F., Sedlmeier,
A., Gabor, T., and Linnhoff-Popien, C. (2020a).
Nash equilibria in multi-agent swarms. In ICAART:
Proceedings of the 12th International Conference on
Agents and Artificial Intelligence, pages 234–241.
Hahn, C., Phan, T., Gabor, T., Belzner, L., and
Linnhoff-Popien, C. (2019). Emergent Escape-based
Aquarium: A Comprehensive Framework for Exploring Predator-Prey Dynamics Through Multi-Agent Reinforcement Learning Algorithms
69

Flocking Behavior using Multi-Agent Reinforcement
Learning. In Proceedings of the 2019 Conference on
Artificial Life, pages 598–605.
Hahn, C., Ritz, F., Wikidal, P., Phan, T., Gabor, T., and
Linnhoff-Popien, C. (2020b). Foraging swarms using
multi-agent reinforcement learning. In Proceedings
of the 2020 Conference on Artificial Life, pages
333–340.
H
¨
uttenrauch, M.,
ˇ
So
ˇ
si
´
c, A., and Neumann, G. (2019). Deep
reinforcement learning for swarm systems. Journal of
Machine Learning Research, 20(54):1–31.
Kuchkuda, R. (1988). An Introduction to Ray Tracing.
Theoretical Foundations of Computer Graphics and
CAD, pages 1039–1060.
Li, J., Li, L., and Zhao, S. (2023). Predator–prey survival
pressure is sufficient to evolve swarming behaviors.
New Journal of Physics, 25(9):092001.
Lowe, R., WU, Y., Tamar, A., Harb, J., Pieter Abbeel,
O., and Mordatch, I. (2017). Multi-agent actor-critic
for mixed cooperative-competitive environments. In
Advances in Neural Information Processing Systems
(NeurIPS), volume 30, pages 6379–6390.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A.,
Veness, J., Bellemare, M. G., Graves, A., Riedmiller,
M., Fidjeland, A. K., Ostrovski, G., et al. (2015).
Human-level control through deep reinforcement
learning. Nature, 518(7540):529–533.
Mordatch, I. and Abbeel, P. (2018). Emergence of grounded
compositional language in multi-agent populations. In
Proceedings of the Thirty-Second AAAI Conference
on Artificial Intelligence.
Olson Randal S., Haley Patrick B., D. F. C. and
Christoph, A. (2015). Exploring the evolution
of a trade-off between vigilance and foraging in
group-living organisms. Royal Society Open Science,
2(9).
Phan, T., Belzner, L., Gabor, T., Sedlmeier, A., Ritz,
F., and Linnhoff-Popien, C. (2021). Resilient
multi-agent reinforcement learning with adversarial
value decomposition. In Proceedings of the
AAAI Conference on Artificial Intelligence, pages
11308–11316.
Reynolds, C. W. (1987). Flocks, herds and schools:
A distributed behavioral model. ACM SIGGRAPH
Computer Graphics, 21(4):25–34.
Reynolds, C. W. (1999). Steering behaviors for autonomous
characters. Game developers conference, pages
763–782.
Ritz, F., Hohnstein, F., M
¨
uller, R., Phan, T., Gabor, T.,
Hahn, C., and Linnhoff-Popien, C. (2020). Towards
Ecosystem Management from Greedy Reinforcement
Learning in a Predator-Prey Setting. In Proceedings
of the 2020 Conference on Artificial Life, pages
518–525.
Ritz, F., Ratke, D., Phan, T., Belzner, L., and
Linnhoff-Popien, C. (2021). A Sustainable Ecosystem
through Emergent Cooperation in Multi-Agent
Reinforcement Learning. In Proceedings of the 2021
Conference on Artificial Life, pages 74–84.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization
algorithms. arXiv preprint, abs/1707.06347.
Silver, D., Hubert, T., Schrittwieser, J., Antonoglou, I.,
Lai, M., Guez, A., Lanctot, M., Sifre, L., Kumaran,
D., Graepel, T., Lillicrap, T., Simonyan, K., and
Hassabis, D. (2018). A general reinforcement learning
algorithm that masters chess, shogi, and go through
self-play. Science, 362(6419):1140–1144.
Stone, P. and Veloso, M. (2000). Multiagent systems:
A survey from a machine learning perspective.
Autonomous Robots, 8(3):345–383.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement
Learning: An Introduction. A Bradford Book,
Cambridge, MA, USA.
Terry, J., Black, B., Grammel, N., Jayakumar, M.,
Hari, A., Sullivan, R., Santos, L. S., Dieffendahl,
C., Horsch, C., Perez-Vicente, R., et al. (2021).
Pettingzoo: Gym for multi-agent reinforcement
learning. Advances in Neural Information Processing
Systems, 34:15032–15043.
Vinyals, O., Babuschkin, I., Czarnecki, W. M., Mathieu,
M., Dudzik, A., Chung, J., Choi, D. H., Powell, R.,
Ewalds, T., Georgiev, P., et al. (2019). Grandmaster
level in starcraft ii using multi-agent reinforcement
learning. Nature, 575(7782):350–354.
Volterra, V. (1926). Fluctuations in the Abundance
of a Species considered Mathematically1. Nature,
118(2972):558–560.
Yang, Y., Yu, L., Bai, Y., Wen, Y., Zhang, W., and Wang,
J. (2018). A study of ai population dynamics with
million-agent reinforcement learning. In Proceedings
of the 17th International Conference on Autonomous
Agents and MultiAgent Systems (AAMAS), page
2133–2135.
Zhong-Yu, L., Li-Xin, G., and Zhong-Bo, Z. (2010). An
acceleration technique for 2d ray tracing simulation
based on the research of diffraction in urban
environment. In Proceedings of the 9th International
Symposium on Antennas, Propagation and EM
Theory, pages 493–496.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
70
