
On Handling Concept Drift, Calibration and Explainability in
Non-Stationary Environments and Resources Limited Contexts
Sara Kebir
a
and Karim Tabia
b
Univ. Artois, CNRS, CRIL F-62300 Lens, France
Keywords:
Concept Drift, Lightweight Incremental Learning, Calibration, XAI, Feature Attribution.
Abstract:
In many real-world applications, we face two important challenges: The shift in data distribution and the
concept drift on the one hand, and on the other hand, the constraints of limited computational resources,
particularly in the field of IoT and edge AI. Although both challenges have been well studied separately,
it is rare to tackle these two challenges together. In this paper, we put ourselves in a context of limited
resources and we address the problem of the concept and distribution shift not only to ensure a good level of
accuracy over time, but also we study the impact that this could have on two complementary aspects which
are the confidence/calibration of the model as well as the explainability of the predictions in this context.
We first propose a global framework for this problem based on incremental learning, model calibration and
lightweight explainability. In particular, we propose a solution to provide feature attributions in a context of
limited resources. Finally, we empirically study the impact of incremental learning on model calibration and
the quality of explanations.
1 INTRODUCTION
In some applications, data properties are not station-
ary (they may change over time) and shifts in the
statistical properties of some classes may occur im-
pacting negatively the performance of the used ma-
chine learning (ML) models. This is a well-known
problem called concept drift (Lu et al., 2019) and its
treatment consists in detecting such drifts then updat-
ing the used models with recent available data. In
modern applications, it is no longer enough to have
an accurate ML model, but to have complete confi-
dence in these systems, it is also necessary to have
well-calibrated models (providing good estimates of
their predictive uncertainty) and explainable predic-
tions. These problems are relatively well studied in
the literature. However, this problem in a context of
limited resources is very little explored. Indeed, if
we consider the problem of anomaly detection in the
case of a smart home where several sensors are used
and where the detection is done in an egde AI fash-
ion (locally and closer to the data collection sites),
it is essential to take into account the changes and
shifts that may occur over time (e.g. because people’s
a
https://orcid.org/0000-0002-4471-9119
b
https://orcid.org/0000-0002-8632-3980
habits change, the context too, etc.). It is also essen-
tial to provide a precise estimate of the confidence of
the models and to have explanations when an alert is
raised.
In an era where the Internet of Things (IoT) has
rapidly permeated our lives, the promise of intercon-
nected devices ushering in a new age of convenience
and efficiency is undeniable. From smart homes that
adjust lighting and temperature to intrusion detec-
tion systems keeping us safe, the applications of IoT
streaming data are diverse. Nevertheless, the resource
constraints in this context are a harsh reality. The
IoT devices are designed to be power-efficient, often
equipped with minimal processing power, memory,
and energy resources (Cook et al., 2020). This inher-
ent limitation forces us to consider innovative strate-
gies for processing, analyzing, and acting upon the
data they generate. One of the main challenges ac-
companying this context is the dynamic and evolving
nature of the data analyzed in the ever-changing and
non-stationary real environments. As the AI used sys-
tems rely on historical data and trained models, they
struggle to maintain their accuracy and effectiveness
when facing shifts in data distributions, new patterns,
or changing user habits causing model degradation
and detection failure.
In the realm of addressing this challenge of concept
336
Kebir, S. and Tabia, K.
On Handling Concept Drift, Calibration and Explainability in Non-Stationary Environments and Resources Limited Contexts.
DOI: 10.5220/0012382200003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 336-346
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

drift, numerous models and techniques have emerged,
showcasing the pressing demand for adaptive ma-
chine learning strategies. These methodologies span
a spectrum of domains, including incremental learn-
ing algorithms like Hoeffding Trees (HTs) (Lu et al.,
2019) and robust concept drift detection mechanisms
such as ADWIN (Bifet, 2009). These models aim
to accommodate the evolving nature of data distribu-
tions, allowing machine learning systems to maintain
their predictive accuracy over time. Although efforts
are numerous around this issue, there are few works
that address the impact of concept drift and adaptive
strategies on confidence, calibration and explainabil-
ity in non-stationary contexts. In this work, we focus
on problems where resources are limited and the con-
text is non-stationary while trying to shed light on the
trustworthiness of the evolutive AI systems. The main
contributions of the paper are :
1. We first, propose a framework to treat the concept
drift problem on stream data using a lightweight
windowing ensemble model consuming less time
and memory compared to the adaptive state-of-
the-art methods;
2. We then, provide the first preliminary results on
explainability in a lightweight context. The pro-
posed scheme is designed to use very few re-
sources and provides explanations as close to a
standard explanation method, like SHAP, which
are very demanding;
3. We finally, draw attention to the impact of con-
cept drift and incremental learning on the calibra-
tion and the quality of explainabilty of the used
model over time and open up the question to new
perspectives.
2 RELATED WORKS
Before diving into the issue of handling concept drift
in resource constrained environments, we present,
through this section, the related works to the concept
drift detection, adaptation and the potential impact on
calibration and explainability of the used models over
time.
2.1 Concept Drift Detection
Concept drift problems frequently arise in IoT data
due to its non-stationary nature and the dynamic envi-
ronments in which IoT systems operate. This can lead
to the deterioration of the performance of ML models.
Detecting concept drift in IoT data presents two pri-
mary challenges: the presence of numerous potential
causing factors and multiple types of drifts (Agrahari
and Singh, 2022; Lu et al., 2019). The most common
type of drifts is sudden drift, where the data distri-
bution changes abruptly, often due to external factors
like a shift in user behavior or a change in the envi-
ronment. Gradual drift, on the other hand, involves
a more gradual and consistent change where a new
concept gradually replaces an old one over a period
of time, making it challenging to detect. Incremen-
tal drift occurs when the drift happens in small, incre-
mental steps. Finally, recurring drift involves periodic
changes, often influenced by seasonal or cyclical pat-
terns in the data. Detecting and adapting to these var-
ious types of concept drift is essential for maintaining
the accuracy and reliability of machine learning mod-
els.
To effectively address the issue of concept
drift, various detection techniques can be employed.
Among the commonly used approaches for this pur-
pose are distribution-based and performance-based
methods (Yang and Shami, 2023).
Distribution-based methods rely on the use of data
buffers, which can either be fixed-sized sliding win-
dows or adaptive windows, to monitor different con-
cepts. These methods are specifically designed to de-
tect concept drift by observing changes within these
windows. ADWIN, a well-known distribution-based
approach, utilizes an adaptable sliding window to
identify concept drift (Bifet, 2009). It does so by com-
paring key characteristic values of old and new data
distributions, like mean and variance values. A signif-
icant alteration in these characteristic values over time
serves as an indicator of a drift occurrence. ADWIN
is particularly effective at dealing with gradual drifts
and long-term changes. However, it can sometimes
generate false alarms and unnecessary model updates.
Performance-based methods, on the other hand,
assess model performance over time to recognize con-
cept drift. These methods gauge the rate of degra-
dation in model performance. Early Drift Detec-
tion Method (EDDM) (Baena-Garc
´
ıa et al., 2006),
a widely-used performance-based technique, tracks
changes in model performance based on the rate of
change in a learning model’s error rate and standard
deviation. By employing drift and warning thresh-
olds, EDDM can effectively identify instances of
model performance degradation and the occurrence
of concept drift, particularly sudden drift. However,
it may not be as proficient as distribution-based meth-
ods in detecting gradual drift. Performance-based
methods can effectively detect the drifts that cause
model degradation, but they require the availability
of ground-truth labels (Yang and Shami, 2021).
On Handling Concept Drift, Calibration and Explainability in Non-Stationary Environments and Resources Limited Contexts
337

2.2 Concept Drift Adaptation
Once concept drift is detected, it is crucial to effec-
tively address it to enable the learning model to adapt
to the new data patterns. Several techniques can be
used to handle concept drift.
Incremental learning methods involve the partial
updating of the learning model whenever new sam-
ples arrive or concept drift is identified. This al-
lows the model to adapt incrementally to changing
data. Hoeffding Trees (HTs) (Lu et al., 2019) rep-
resents a fundamental incremental learning technique
that utilizes the Hoeffding inequality to calculate the
minimum required number of data samples for each
split node. This allows it to update nodes and adapt
to new data samples. Extremely Fast Decision Tree
(EFDT) (Manapragada et al., 2018) is a cutting-edge
incremental learning approach and an enhanced ver-
sion of HTs. It promptly selects and deploys node
splits as soon as they attain a confidence value indi-
cating their utility. EFDT excels at adapting to con-
cept drift more accurately and efficiently compared
to HTs. Online Passive-Aggressive (OPA) (Cram-
mer et al., 2006) is another incremental learning al-
gorithm that treats drifts by passively reacting to cor-
rect predictions and aggressively responding to errors.
Numerous incremental approaches have been devel-
oped by leveraging conventional machine learning al-
gorithms. For instance, K-Nearest Neighbors with the
ADWIN drift detector (KNN-ADWIN) (Losing et al.,
2016) represent an enhanced iteration of the tradi-
tional KNN model designed for real-time data anal-
ysis. KNN-ADWIN, incorporates an ADWIN drift
detector into the conventional KNN model and em-
ploys a dynamic window to determine which samples
should be retained for model updates.
Ensemble online learning models represent ad-
vanced methods for adapting to concept drift, inte-
grating the predictions of multiple base learners to
enhance performance. Leverage Bagging (LB) (Bifet
et al., 2010), is a fundamental ensemble technique
that creates and combines multiple base learners, such
as Hoeffding Trees (HTs), using bootstrap samples
and a majority voting strategy. Adaptive Random For-
est (ARF) (Gomes et al., 2017) and Streaming Ran-
dom Patches (SRP) (Gomes et al., 2019) are two so-
phisticated ensemble online learning approaches that
utilize multiple HTs as base models and incorporate a
drift detector, such as ADWIN, for each HT to handle
concept drift. ARF employs the local subspace ran-
domization strategy to construct trees, while SRP uti-
lizes global subspace randomization to generate ran-
dom feature subsets for model learning. The use of
global subspace randomization enhances SRP’s learn-
ing performance but comes at the cost of increased
model complexity and longer learning times. Multi-
Stage Automated Online Network Data Stream An-
alytics (MSANA) is a framework that has been pro-
posed by (Yang and Shami, 2023) for IoT Systems
where they use a window-based strategy and select
lightweight base learners with greater computational
speeds to build the ensemble model. Their frame-
work consists of dynamic data pre-processing, drift-
based dynamic feature selection, dynamic model se-
lection, and online model ensemble using a novel W-
PWPAE approach (Yang et al., 2021). While ensem-
ble online learning techniques generally surpass in-
cremental learning methods in the realm of dynamic
data stream analysis, they often come with a signifi-
cant computational cost (Yang and Shami, 2023).
2.3 Classifier Calibration and
Explainability
In this context of adaptive learning, where models are
continuously updated with new data, concept drift can
have a profound impact on the model’s predictive per-
formance. Some of the crucial aspects that may also
be affected by concept drift are the confidence, quality
of calibration and explainability of the used models.
Calibration measures how well a model’s pre-
dicted probabilities align with the actual likelihood of
an event occurring (Vaicenavicius et al., 2019). When
concept drift occurs and the model is not regularly
updated to account for it, the calibration may dete-
riorate over time, leading to unreliable and mislead-
ing probability estimates. To maintain the quality of
calibration in incremental learning, models must be
regularly monitored and adapted to evolving data dis-
tributions, ensuring that predictions remain trustwor-
thy and valuable for decision-making. As with the
measurement of classifier efficiency, there are vari-
ous metrics for measuring calibration. Some com-
monly used measures are Expected Calibration Error
(ECE), Average Calibration Error (ACE) and Maxi-
mum Calibration Error (MCE). Miscalibration mea-
sures assess errors by classifying samples according
to their confidence level, and then evaluating the ac-
curacy within each class. For example, MCE is sim-
ply the weighted average difference between the clas-
sifier’s confidence and the observed accuracy (on a
test set) in each bin. Similarly, the maximum cali-
bration error (MCE) simply gives the maximum de-
viation (Naeini et al., 2015). Negative log likelihood
(NLL) can also be used to indirectly measure model
calibration since it penalizes high probability scores
assigned to incorrect labels and low probability scores
assigned to correct labels (Ashukha et al., 2020). Cal-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
338

ibration quality improves as these metrics decrease.
Explainability in machine learning is crucial for
understanding model decisions. XAI post-hoc expla-
nation methods like SHAP (Lundberg and Lee, 2017)
and LIME (Ribeiro et al., 2016) are well-known fea-
ture attribution methods. Although proficient at of-
fering insights into the used models’ predictions, they
are often resource-intensive, especially when dealing
with complex models or high-dimensional datasets
(Van den Broeck et al., 2021). This computational
intensity can pose considerable limitations in applica-
tions where real-time decision-making is crucial, such
as the detection of emergency situations affecting the
elderly in smart homes. In addition, their high com-
putational demands can lead to increased energy con-
sumption and costs, which may prove unsustainable
in resource-constrained environments. There is there-
fore a compelling need for lightweight XAI systems
that strike a balance between explainability and real-
time feasibility.
3 PROPOSED FRAMEWORK
In response to the possible fluctuations in data dis-
tribution over time driven by concept drift, it be-
comes crucial to adopt an incremental learning strat-
egy. This involves continually training and updating
the ML model as new data becomes available. The
process of labeling data in such cases can be quite de-
manding and resource-intensive, often requiring the
involvement of domain experts in real-world applica-
tions. Our framework, illustrated in Figure 1 and de-
scribed in this section, summarizes the different steps
of the process going from an initial offline training
of the used model to its deployment in a resource-
constrained environment and update over time when
receiving the stream data. This will be followed by
the proposed lightweight explanation approach.
3.1 Global Overview of the Solution
As illustrated on Figure 1, the proposed framework is
composed of three basic building blocks each ensur-
ing an important functionality, namely, i) incremental
learning to adapt to the concept drift, ii) model cali-
bration to provide a good estimate of the model’s con-
fidence, and finally, ii) the explanation of the model
predictions (to verify and trust the predictions). Of
course, this solution is specially designed for con-
strained environments and limited in computational
resources.
When deployed in a resource-constrained environ-
ment and when new data becomes available, this sys-
tem makes predictions by combining the votes from
the base classifiers within the ensemble model to de-
termine both the target value and the level of con-
fidence. After this prediction phase, an explanation
is generated. This explanation, when coupled with
the predicted class label and the machine learning
model’s confidence level, enhances trust in the predic-
tion and aids the expert in assigning the most precise
label. We will focus in the following on each building
bloc.
3.2 Model Offline / Adaptive Learning
To meet the constraints of limited resources, we chose
an incremental learning scheme based on windowing
ensemble models composed of a few lightweight ba-
sic classifiers, as they offer a good compromise be-
tween adaptation to the concept drift and low resource
consumption.
First, we initiate the training of the windowing
ensemble model during an offline phase, utilizing a
training dataset ensuring that all its base classifiers are
initially trained on the same data at this stage.
Since the combination of initial training data and
the incoming data stream is effectively endless, mak-
ing online approaches inefficient in terms of time and
computational resources, we opt for the use of a win-
dow to store the most recent incoming data until the
next training iteration. The window size can be dy-
namic or fixed in advance depending on the nature of
the data. Pre-selecting the data to be saved in this
window can also be adopted to limit recurring occur-
rences that would not have much impact on retrain-
ing. Finally, the incremental and adaptive re-training
is exclusively applied on the least efficient base clas-
sifier during each iteration to effectively handle po-
tential concept drift in a less resource-intensive way,
all while preserving the accumulated knowledge to
maintain the continuous performance of the ensemble
model. To further meet the challenge of limited re-
sources, this incremental re-training can be triggered
in two ways. The first is by setting up a concept drift
detector based on either the data contained in the win-
dow, or the model’s performance, or a combination of
both. The second is to perform this re-training peri-
odically when the length of the window storing new
data reaches its threshold.
3.3 Lightweight Prediction Explanation
To ensure more efficient and lightweight XAI sys-
tems, we propose a shift from traditional, resource-
On Handling Concept Drift, Calibration and Explainability in Non-Stationary Environments and Resources Limited Contexts
339
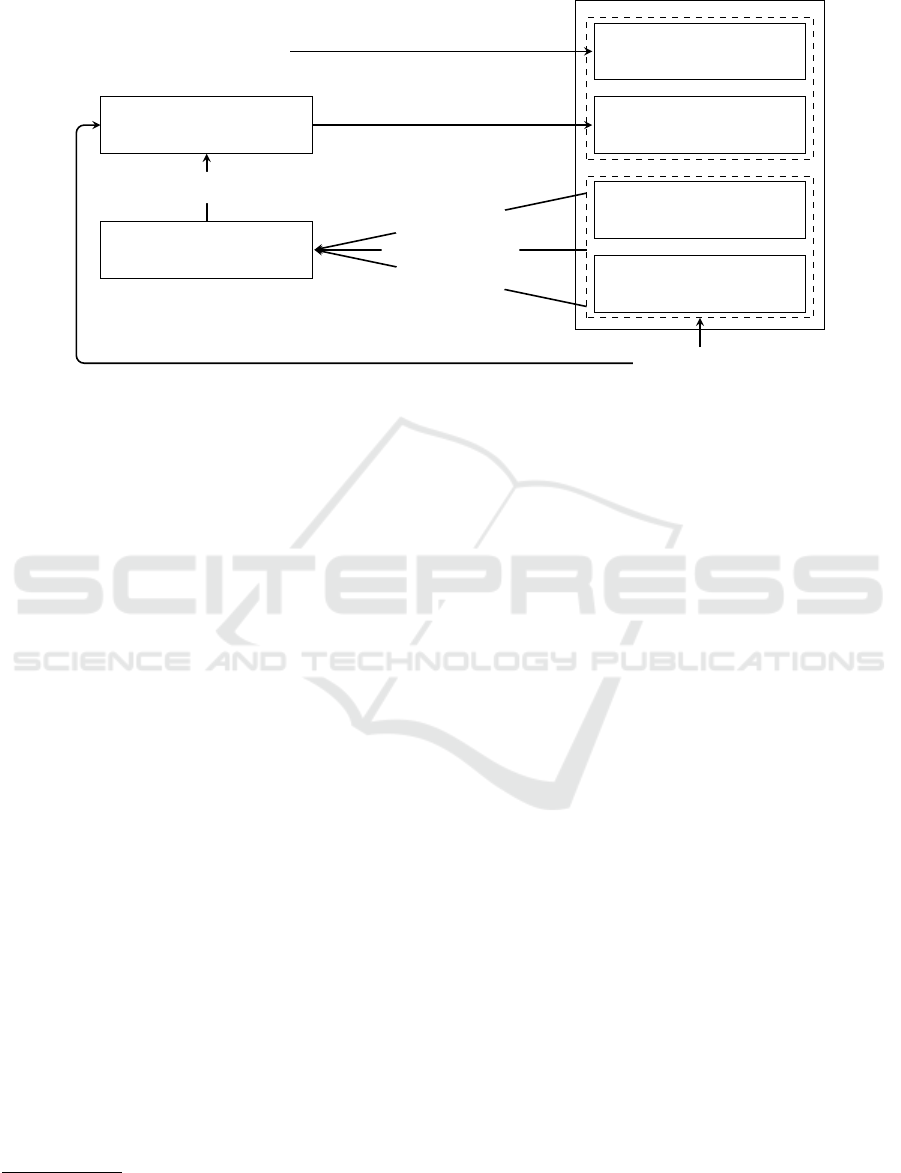
Model
Offline learning
Adaptive learning
Online prediction
XAI
User
Storage window
Streaming data
Initial training data
Labeling
Target value
Calibration rate
Explanation
Figure 1: Concept drift adaptation proposed framework.
intensive XAI models to the use of lightweight
1
ML
models, such as linear regressors and decision trees
for example. Our fundamental concept centers around
reducing the computational overhead linked to gener-
ating explanations by replacing them with regressions
using ML predictive models which are much lighter
in terms of prediction time and memory consumption.
Fig. 2 illustrates how we generate lightweight expla-
nations.
Instead of using an E explanation as a resource
-overly greedy shap, to explain a predicition y for a
data sample x, we propose to replace (more precisely
to approximate) the explainer E by a set of regression
models f
x
1
... f
x
n
where each model f
x
i
tries to pre-
dict E(x
i
) the feature attribution computed by E for
the attribute x
i
. The advantage of doing so is to learn
offline models (in an environment that is resource-
constrained) and then deploy these models in the con-
strained environment. These models which are sup-
posed to approximate the Explainer E are of light size
and above ensure feature attribution with a minimum
of resources. To set up this solution, we have to
• Build an explanation dataset: to be able to ap-
proximate an explaner E which provides for a data
sample x = (x
1
, .., x
n
) and a prediction y made by
the model to be explained, a vector of feature at-
tributions ( f
x
1
, .., f
x
n
) of scores where each score
f
x
i
tells how much the feature X
i
was influential
in the prediction y for x. Thus, to learn models
that approximate E, we build a dataset composed
of data samples x, their predictions by the model
1
By lightweight ML models we mean models with low
complexity (determining model size) and prediction time.
to be explained y as well as the feature attribution
vectors computed by the explainer E as illustrated
on the Table 1. This dataset can be easily built by
taking up the dataset D which is used to train the
model to be explained, the model’s predictions on
D and the explanations provided by the Explainer
chosen E for data sample in D.
• Build regressors to provide feature attribu-
tions: Once explanation dataset has been built, we
can train regression models (or only one model
with several outputs in case of neural network-
based regression) . If we build a model by feature
f
x
i
, then we have to train the regression model on
the data play D and the corresponding explanation
column f
x
i
only.
4 EXPERIMENTAL STUDY
4.1 Experimental Settings
To assess the effectiveness of the proposed frame-
work, four public IoT datasets related to anomaly
detection and human activity recognition in a smart
home environment facing concept drifts, are used:
NSL-KDD, CICIDS2017, IoTID20 and Aruba.
• NSL-KDD is a balanced benchmark dataset for
concept drift and network intrusion detection (Liu
et al., 2020). For this dataset, it is known that there
is a sudden drift when transitioning from the train-
ing set to the test set (Yang and Shami, 2021).
• CICIDS2017 is a dataset provided by the Cana-
dian Institute of Cybersecurity (CIC), involving
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
340
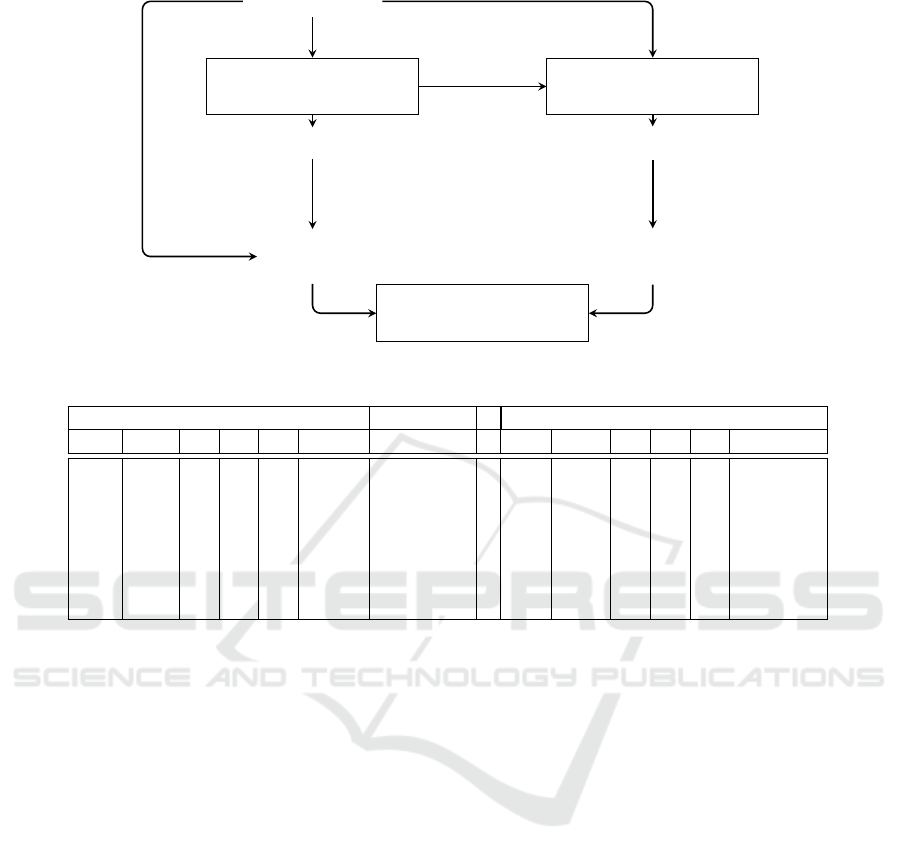
Training data D
Classifier f
Class label y
i
Explanation f
x
i
Explainer E
Training
input (x
i
, y
i
)
Training
expected output f
x
i
Lightweight explainer
Figure 2: Lightweight explanation proposed approach.
Table 1: Illustration of the explanations dataset.
Input features X Prediction Feature attributions by an explainer E
X
1
X
2
... ... ... X
n
Y f
X
1
f
X
2
... ... ... f
X
n
12 ”B” ... ... ... ”SF” 1 .34 .001 ... ... ... .12
8 ”C” ... ... ... ”UG” 0 .05 .21 ... ... ... .02
55 ”A” ... ... ... ”PS” 0 .07 .31 ... ... ... 0
... ... ... ... ... ... ... ... ... ... ... ... ...
... ... ... ... ... ... ... ... ... ... ... ... ...
... ... ... ... ... ... ... ... ... ... ... ... ...
100 ”B” ... ... ... ”SF” 1 .02 0 ... ... ... .05
cyber-attack scenarios. As different types of at-
tacks were launched in different time periods
to create this dataset, the attack patterns in the
dataset change over time, causing multiple con-
cept drifts (Sharafaldin et al., 2018).
• IoTID20 is an IoT traffic dataset with unbalanced
data samples (94% normal samples versus 6% ab-
normal samples) for abnormal IoT device detec-
tion (Ullah and Mahmoud, 2020).
• Aruba is a dataset collected within the CASAS
smart home project (Cook, 2012). This dataset
collected different data sources in the home of an
adult volunteer. The resident of the house was
a woman who received visits from her children
and grandchildren regularly between 4 November
2010 and 11 June 2011. Two data sources gave
rise to the information, the first source was binary
and was made up of movement and contact sen-
sors, and the second source was made up of tem-
perature sensors.
For the purpose of this work, a representative
IoTID20 subset with 6,252 records and a sampled CI-
CIDS2017 subset with 14,155 records, as well as a
reduced Aruba dataset that has 200,784 records com-
bining the firsts and lasts months of the experiment
are used for the model evaluation.
These datasets allow us to see how our frame-
work performs in binary classification for anomaly
detection and in multi-class classification for activity
recognition. They also allow us to observe how it per-
forms in dealing with class imbalance, which is quite
prevalent in the IoTID20 and CICIDS2017 datasets.
Two validation methods, namely hold-out and pre-
quential, are utilized for evaluation. In the hold-out
evaluation, the initial 20% of the data is utilized for
the initial model training, while the remaining 80%
is reserved for online testing. In prequential valida-
tion, also known as test-and-train validation, each in-
put sample from the online test set serves a dual pur-
pose: first, it tests the learning model, and then it con-
tributes to model training and updating (Yang et al.,
2021).
The windowing ensemble model tested is com-
posed of three decision trees as base classifiers. The
model is updated in an incremental way by retrain-
ing the least efficient base classifier using windows of
length 2000, 50, 500 and 10000 records for the NSL-
KDD, CICIDS2017, IoTID20 and Aruba datasets, re-
spectively.
On Handling Concept Drift, Calibration and Explainability in Non-Stationary Environments and Resources Limited Contexts
341

The evaluation of the proposed framework’s per-
formance relies on different metrics linked to pre-
diction quality, model calibration and lightweight in
terms of total time and memory used during learning
(accuracy, F1-score, NLL, ECE, MCE, total training
time as well as occupied and peak memory).
4.2 Lightweight Adaptive Learning
Tables 2, 3, 4, 5 show the performance comparison
of the proposed framework with other state-of-the-
art drift adaptive approaches, including ARF (Gomes
et al., 2017), SRP (Gomes et al., 2019), EFDT (Man-
apragada et al., 2018), KNN-ADWIN (Losing et al.,
2016), OPA (Crammer et al., 2006), LB (Bifet et al.,
2010) and MSANA (Yang and Shami, 2023). We can
see that the ensemble model used without re-training
(Baseline) was impacted by the various concept drifts
contained in the four datasets tested, which explains
its poorer performance compared to the online mod-
els. However, after the adaptive training phase (L-
Ens), the model’s performance improved on all tested
datasets. The obtained results are better than those
achieved with state-of-the-art methods on NSL-KDD
and IoTID20 and almost similar on CICIDS2017 and
Aruba. Figures 3 and 4 illustrate the continuous varia-
tion in accuracy of all the methods tested, and we can
visually confirm that our approach adapts very well
after the onset of concept drifts, which is not the case
with the baseline model used without retraining. Fur-
thermore, according to the calibration measurements
(NLL, ECE, MCE) in Tables 2, 3, 4, 5, we can say that
with the online training performed by the state-of-the-
art methods, the calibration deteriorated over time,
which is not the case with our ensemble method even
after periodic re-training. Regarding the lightweight
nature of the proposed framework, our approach re-
quired much less training time and used less memory
than all the other state-of-the-art tested methods. This
proves its effectiveness and good adaptation to con-
cept drift, while answering the lightweight challenge.
4.3 Lightweight Explanation
Our proposal, although preliminary, has been tested
with the four datasets presented above, by first, using
as main classifier f a LightGBM (Jin et al., 2020),
which is a fast and powerful ML model based on the
ensemble of several decision trees, then, SHAP tree-
Explainer (Lundberg et al., 2020) as the basic expla-
nation model, and finally, a decision tree model as the
classifier f
′
generating the lightweight explanations.
Table 6 shows the results of our preliminary ap-
proach (L-exp) compared with those obtained using
SHAP. The evaluation measures used are related, on
the one hand, to the quality of the explanations gener-
ated, and on the other, to the time and memory occu-
pied when predicting a series of 1000 instances. The
quality of the explanations was analyzed on differ-
ent levels. The first is the reconstruction error mse,
describing the gap between the explanations gener-
ated by our approach (through regression) and the
true explanations (set of test instances generated by
SHAP). The second level is linked to the predicted
features. For a given explanation, we check on the
first 2, 5 and 10 features, the rate of those that are
common with the SHAP explanation, among which
we note the rate of series where the features are iden-
tical, as well as the rate linked to the order of their
appearance. From the results obtained, whether on
the first 2, 5 or 10 features among the total of 41, 77,
31 and 38 features of the tested datasets, respectively
NSL-KDD, CICIDS2017, IoTID20 and Aruba, we
note that the SHAP explanations are almost similar to
those generated with our approach, while meeting the
lightweight criterion. Indeed, our approach (L-exp)
takes much less time and memory than SHAP, espe-
cially on multi-class sets where XAI consumes much
more memory than our framework.
4.4 Impact of Incremental Learning on
Model Calibration and
Explainability
It is also important to highlight the impact of concept
drift on the explanations generated, as illustrated in
Figures 5 and 6 for the NSL-KDD and CICIDS2017
datasets respectively. Indeed, we can see at the con-
cept drift detection points in the dataset an increase in
the mse error related to the quality of the generated
explanations. Furthermore, based on the calibration
measurements (NLL, ECE, MCE) in Tables 2, 3, 4
and 5, it can be observed that the online training con-
ducted by state-of-the-art methods led to a degrada-
tion in their calibration over time. Consequently, the
issue of adaptation not only in relation to the perfor-
mance of the classifiers, but also to that of the calibra-
tion and quality of the explanation of the techniques
currently in use over time, is put into perspective.
5 DISCUSSION AND
CONCLUDING REMARKS
Through this work, we have highlighted the impor-
tance of taking into account the occurrence of con-
cept drift and its impact on the ML models perfor-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
342
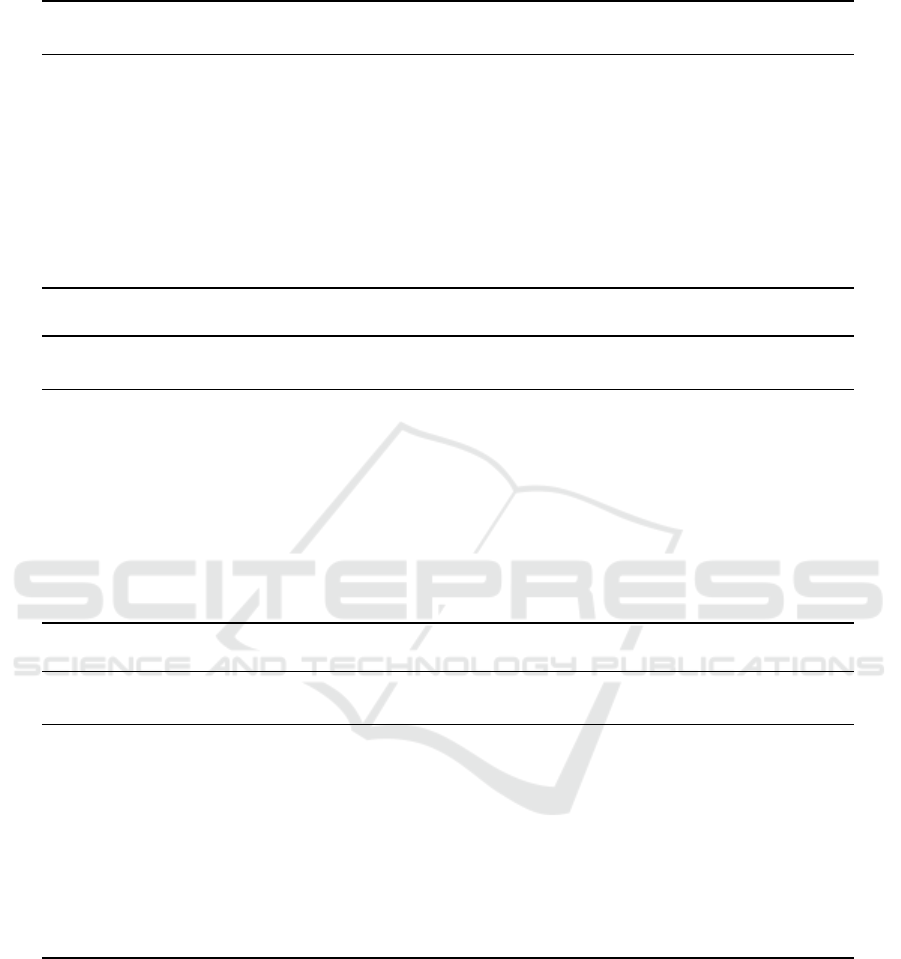
Table 2: Performance comparison of our approach and state-of-the-art methods on NSL-KDD.
Model Acc% F1% NLL ECE% MCE%
Training Occupied Peak
time (s) mem (Kb) mem (Kb)
ARF-ADWIN 97.45 97.36 0.08 1.92 21.95 303.51 4977.42 8641.43
ARF-EDDM 98.05 97.99 0.07 1.14 18.34 465.56 10462.17 23007.39
SRP 97.93 97.86 0.08 1.41 22.62 1869.27 11779.89 19309.99
EFDT 90.50 89.96 1.13 3.27 12.27 6097.24 3399.01 4454.46
KNN-ADWIN 91.93 91.43 0.48 5.09 23.62 45.55 137.82 314.48
OPA 90.47 90.17 0.24 0.52 2.56 19.24 91.87 145.67
LB 97.53 97.44 0.09 0.57 12.70 1400.55 24131.05 24167.58
MSANA 92.90 92.49 0.17 2.13 6.34 2313.64 22522.52 74407.18
Baseline 95.99 95.75 1.43 0.01 3.98 0.78 57.88 6685.43
L-Ens 98.17 98.10 0.28 0.02 15.08 2.04 60.52 6708.88
Table 3: Performance comparison of our approach and state-of-the-art methods on CICIDS2017.
Model Acc% F1% NLL ECE% MCE%
Training Occupied Peak
time (s) mem (Kb) mem (Kb)
ARF-ADWIN 98.55 93.58 0.08 0.59 18.71 33.46 943.91 1869.14
ARF-EDDM 98.73 94.34 0.08 0.74 15.12 33.08 596.64 971.64
SRP 98.98 95.53 0.10 0.58 13.80 272.39 2125.76 7027.66
EFDT 95.01 80.33 1.13 0.99 11.72 332.31 1244.13 1532.5
KNN-ADWIN 98.77 94.72 0.16 0.68 9.30 12.95 138.86 383.19
OPA 98.26 92.43 0.11 6.05 16.81 4.92 43.70 147.05
LB 98.13 91.86 0.14 0.45 15.40 397.88 2460.46 5667.54
MSANA 98.96 95.40 0.07 2.87 15.86 562.71 2519.62 12394.82
Baseline 86.58 0.13 4.84 0.00 13.42 0.11 12.60 1052.09
L-Ens 97.27 87.74 0.38 0.00 1.37 2.43 77.38 1067.70
Table 4: Performance comparison of our approach and state-of-the-art methods on IoTID20.
Model Acc% F1% NLL ECE% MCE%
Training Occupied Peak
time (s) mem (Kb) mem (Kb)
ARF-ADWIN 98.26 99.08 0.09 1.44 21.17 13.78 1053.30 1369.63
ARF-EDDM 98.00 98.95 0.10 1.65 26.32 14.86 1691.27 1702.45
SRP 98.72 99.32 0.10 1.37 19.15 64.27 3002.57 3075.86
EFDT 96.02 97.92 0.40 0.94 1.39 102.42 566.49 772.45
KNN-ADWIN 95.92 97.85 0.30 3.45 25.37 2.88 83.90 243.33
OPA 93.74 96.69 0.19 4.32 11.40 1.00 75.96 115.20
LB 98.06 98.98 0.09 0.74 9.21 95.72 2482.13 2553.32
MSANA 98.58 99.25 0.06 2.12 10.49 323.75 5008.29 6888.13
Baseline 99.26 99.61 0.27 0.00 0.74 0.05 9.14 247.97
L-Ens 99.26 99.61 0.11 0.00 0.19 0.20 38.50 249.79
mance. To address the challenges posed by this con-
cept drift, we explored the benefits of adaptive learn-
ing in resource-constrained environments, while as-
sessing its impact on model performance and calibra-
tion, as well as the quality of explanations provided
over time. Our proposed approach is based on the use
of a lightweight windowing ensemble model that is
incrementally updated. It also includes preliminary
work related to the generation of lightweight expla-
nations. The results obtained on binary and multi-
class datasets demonstrate its effectiveness over time,
while maintaining very low resource costs. These re-
sults also raise questions about the quality of calibra-
tion after this concept drift adaptation stage, and how
to generate high-quality, adaptive explanations over
time. As a future direction, the exploration of uncer-
tainty and reliability in incremental AI facing concept
drift involves enhancing calibration and the quality
of explainability approaches while considering vari-
ous classifiers and XAI methods. This exploration
On Handling Concept Drift, Calibration and Explainability in Non-Stationary Environments and Resources Limited Contexts
343
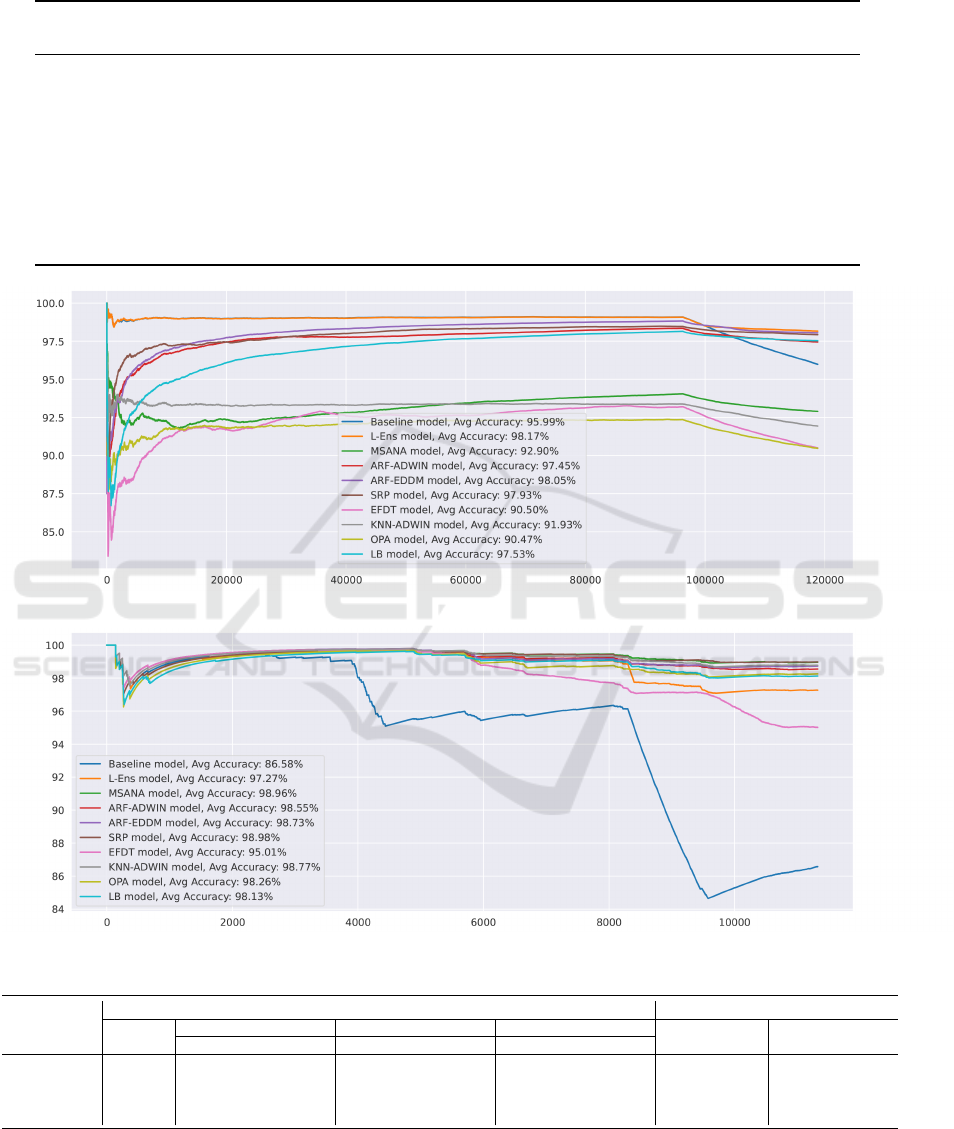
Table 5: Performance comparison of our approach and state-of-the-art methods on Aruba.
Model Acc% F1% NLL ECE% MCE%
Training Occupied Peak
time (s) mem (Kb) mem (Kb)
ARF-ADWIN 96.10 82.47 0.22 2.45 24.48 305.86 453.07 1687.51
ARF-EDDM 96.51 83.82 0.19 3.25 24.22 316.47 831.43 1171.09
SRP 97.51 89.77 0.16 2.13 25.30 2057.65 3583.76 9093.03
EFDT 94.33 73.17 0.78 2.93 15.56 10526.64 6333.47 6501.39
KNN-ADWIN 98.06 93.77 0.15 1.64 58.47 85.15 93.86 268.95
OPA 2.12 4.01 35.26 97.26 98.59 31.52 72.71 134.77
LB 96.24 87.69 0.34 1.45 19.95 1791.96 1184.22 2547.22
Baseline 80.35 50.81 7.08 0.00 19.65 1.92 37.36 15241.17
L-Ens 89.77 60.00 2.27 0.00 5.69 3.61 52.81 15242.80
Figure 3: Accuracy variation on NSL-KDD.
Figure 4: Accuracy variation on CICIDS2017.
Table 6: Evaluation of the quality of generated lightweight explanations.
Dataset
Explanation quality Time (s) Memory (Kb)
Mse
Shared features (%) Same set (%) Same order (%)
SHAP L-exp SHAP L-exp
2 5 10 2 5 10 2 5 10
NSL-KDD 0.0004 95.59 96.34 97.31 91.84 85.57 81.35 97.51 92.33 91.74 0.21 0.002 339.71 322.41
IoTID20 0.04 99.04 99.33 97.60 98.16 96.90 83.01 99.04 96.93 94.51 5.62 0.002 276.46 243.85
CICIDS2017 9.55e-05 97.59 98.38 98.59 96.23 93.06 87.90 99.97 93.27 95.25 0.086 0.002 619.82 603.19
Aruba 84.19 93.68 93.67 95.05 90.37 80.30 75.37 98.27 92.63 87.56 8.06 0.002 3406.64 299.29
should also encompass the assessment of the influ-
ence of data pre-processing and balancing on a con-
tinual basis.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
344
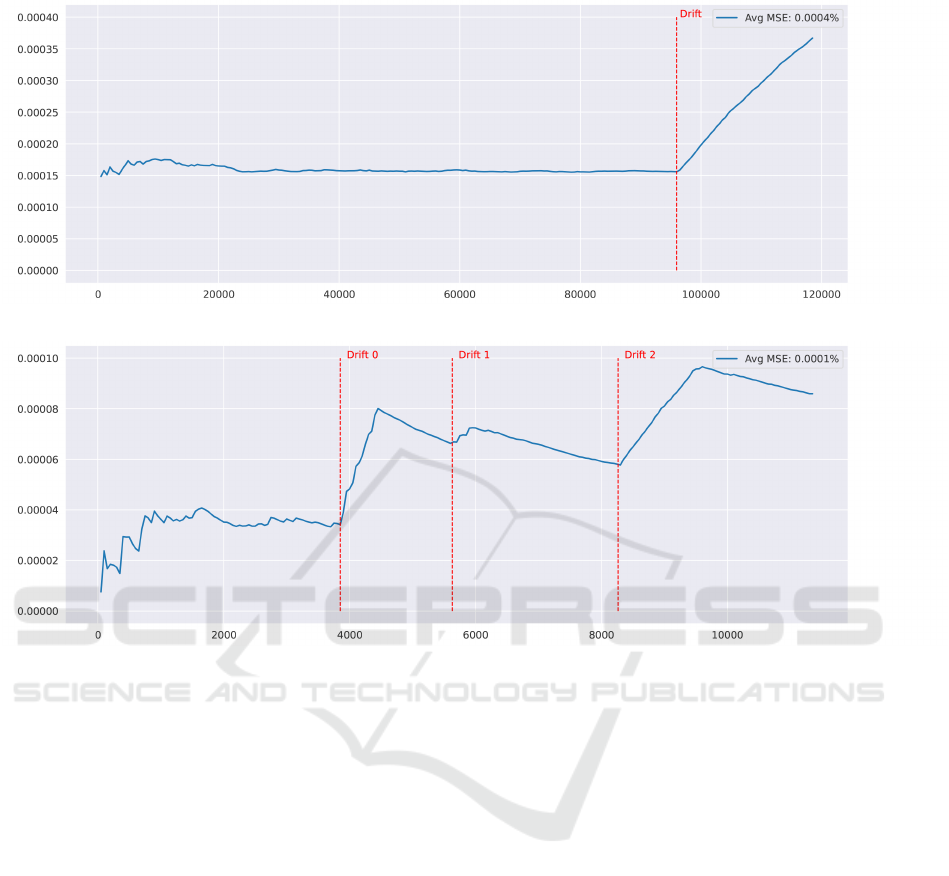
Figure 5: Impact of concept drift on the mse error associated with NSL-KDD explanations.
Figure 6: Impact of concept drift on the mse error associated with CICIDS2017 explanations.
ACKNOWLEDGEMENTS
This work has been supported by the Vivah project
’Vers une Intelligence artificielle
`
a VisAge Humain’
supported by the ANR.
REFERENCES
Agrahari, S. and Singh, A. K. (2022). Concept drift de-
tection in data stream mining : A literature review.
Journal of King Saud University - Computer and In-
formation Sciences, 34(10, Part B):9523–9540.
Ashukha, A., Lyzhov, A., Molchanov, D., and Vetrov, D. P.
(2020). Pitfalls of in-domain uncertainty estimation
and ensembling in deep learning. In 8th International
Conference on Learning Representations, ICLR 2020,
Addis Ababa, Ethiopia, April 26-30, 2020. OpenRe-
view.net.
Baena-Garc
´
ıa, M., Campo-
´
Avila, J., Fidalgo-Merino, R.,
Bifet, A., Gavald, R., and Morales-Bueno, R. (2006).
Early drift detection method.
Bifet, A. (2009). Adaptive learning and mining for data
streams and frequent patterns. SIGKDD Explor.,
11:55–56.
Bifet, A., Holmes, G., and Pfahringer, B. (2010). Leverag-
ing bagging for evolving data streams. In Balc
´
azar,
J. L., Bonchi, F., Gionis, A., and Sebag, M., ed-
itors, Machine Learning and Knowledge Discovery
in Databases, pages 135–150, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Cook, A. A., Mısırlı, G., and Fan, Z. (2020). Anomaly de-
tection for iot time-series data: A survey. IEEE Inter-
net of Things Journal, 7(7):6481–6494.
Cook, D. (2012). Learning setting-generalized activity
models for smart spaces. IEEE Intelligent Systems,
27(1):32–38.
Crammer, K., Dekel, O., Keshet, J., Shalev-Shwartz, S.,
and Singer, Y. (2006). Online passive-aggressive al-
gorithms. Journal of Machine Learning Research,
7:551–585.
Gomes, H., Read, J., and Bifet, A. (2019). Streaming ran-
dom patches for evolving data stream classification.
In 2019 IEEE International Conference on Data Min-
ing (ICDM), pages 240–249, Los Alamitos, CA, USA.
IEEE Computer Society.
Gomes, H. M., Bifet, A., Read, J., Barddal, J. P., En-
On Handling Concept Drift, Calibration and Explainability in Non-Stationary Environments and Resources Limited Contexts
345

embreck, F., Pfharinger, B., Holmes, G., and Ab-
dessalem, T. (2017). Adaptive random forests for
evolving data stream classification. Machine Learn-
ing, 106(9):1469–1495.
Jin, D., Lu, Y., Qin, J., Cheng, Z., and Mao, Z. (2020).
Swiftids: Real-time intrusion detection system based
on lightgbm and parallel intrusion detection mecha-
nism. Computers & Security, 97:101984.
Liu, J., Kantarci, B., and Adams, C. (2020). Ma-
chine learning-driven intrusion detection for contiki-
ng-based iot networks exposed to nsl-kdd dataset. In
Proceedings of the 2nd ACM Workshop on Wireless
Security and Machine Learning, WiseML ’20, page
25–30, New York, NY, USA. Association for Com-
puting Machinery.
Losing, V., Hammer, B., and Wersing, H. (2016). Knn clas-
sifier with self adjusting memory for heterogeneous
concept drift. In 2016 IEEE 16th International Con-
ference on Data Mining (ICDM), pages 291–300.
Lu, J., Liu, A., Dong, F., Gu, F., Gama, J., and Zhang,
G. (2019). Learning under concept drift: A review.
IEEE Transactions on Knowledge and Data Engineer-
ing, 31(12):2346–2363.
Lundberg, S. M., Erion, G., Chen, H., DeGrave, A., Prutkin,
J. M., Nair, B., Katz, R., Himmelfarb, J., Bansal, N.,
and Lee, S.-I. (2020). From local explanations to
global understanding with explainable ai for trees. Na-
ture Machine Intelligence, 2(1):56–67.
Lundberg, S. M. and Lee, S.-I. (2017). A unified approach
to interpreting model predictions. In Proceedings of
the 31st International Conference on Neural Informa-
tion Processing Systems, NIPS’17, page 4768–4777,
Red Hook, NY, USA. Curran Associates Inc.
Manapragada, C., Webb, G. I., and Salehi, M. (2018). Ex-
tremely fast decision tree. In Proceedings of the 24th
ACM SIGKDD International Conference on Knowl-
edge Discovery & Data Mining, KDD ’18, page
1953–1962, New York, NY, USA. Association for
Computing Machinery.
Naeini, M. P., Cooper, G. F., and Hauskrecht, M. (2015).
Obtaining well calibrated probabilities using bayesian
binning. In Proceedings of the Twenty-Ninth AAAI
Conference on Artificial Intelligence, AAAI’15, pages
2901–2907. AAAI Press.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ”why
should i trust you?”: Explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
International Conference on Knowledge Discovery
and Data Mining, KDD ’16, pages 1135–1144, New
York, NY, USA. Association for Computing Machin-
ery.
Sharafaldin, I., Lashkari, A. H., and Ghorbani, A. A.
(2018). Toward generating a new intrusion detection
dataset and intrusion traffic characterization. In Inter-
national Conference on Information Systems Security
and Privacy.
Ullah, I. and Mahmoud, Q. H. (2020). A scheme for gen-
erating a dataset for anomalous activity detection in
iot networks. In Advances in Artificial Intelligence:
33rd Canadian Conference on Artificial Intelligence,
Canadian AI 2020, Ottawa, ON, Canada, May 13–15,
2020, Proceedings, page 508–520, Berlin, Heidel-
berg. Springer-Verlag.
Vaicenavicius, J., Widmann, D., Andersson, C., Lindsten,
F., Roll, J., and Sch
¨
on, T. (2019). Evaluating model
calibration in classification. In Chaudhuri, K. and
Sugiyama, M., editors, Proceedings of the Twenty-
Second International Conference on Artificial Intelli-
gence and Statistics, volume 89 of Proceedings of Ma-
chine Learning Research, pages 3459–3467. PMLR.
Van den Broeck, G., Lykov, A., Schleich, M., and Suciu, D.
(2021). On the tractability of SHAP explanations. In
Proceedings of the 35th AAAI Conference on Artificial
Intelligence.
Yang, L., Manias, D. M., and Shami, A. (2021). Pwpae: An
ensemble framework for concept drift adaptation in iot
data streams. In 2021 IEEE Global Communications
Conference (GLOBECOM), pages 01–06.
Yang, L. and Shami, A. (2021). A lightweight concept
drift detection and adaptation framework for iot data
streams. IEEE Internet of Things Magazine, 4:96–
101.
Yang, L. and Shami, A. (2023). A multi-stage automated
online network data stream analytics framework for
IIoT systems. IEEE Transactions on Industrial Infor-
matics, 19(2):2107–2116.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
346
