
Unsupervised Few-Shot Image Segmentation with
Dense Feature Learning and Sparse Clustering
Kuangdai Leng
1
, Robert Atwood
2
, Winfried Kockelmann
3
,
Deniza Chekrygina
1
and Jeyan Thiyagalingam
1
1
Scientific Computing Department, Science and Technology Facilities Council,
Rutherford Appleton Laboratory, Didcot, U.K.
2
Diamond Light Source, Rutherford Appleton Laboratory, Didcot, U.K.
3
ISIS Neutron and Muon Source, Science and Technology Facilities Council,
Rutherford Appleton Laboratory, Didcot, U.K.
Keywords:
Unsupervised Learning, Image and Video Segmentation, Representation Learning, Regional Adjacency
Graph.
Abstract:
Fully unsupervised semantic segmentation of images has been a challenging problem in computer vision.
Many deep learning models have been developed for this task, most of which using representation learning
guided by certain unsupervised or self-supervised loss functions towards segmentation. In this paper, we con-
duct dense or pixel-level representation learning using a fully-convolutional autoencoder; the learned dense
features are then reduced onto a sparse graph where segmentation is encouraged from three aspects: nor-
malised cut, similarity and continuity. Our method is one- or few-shot, minimally requiring only one image
(i.e., the target image). To mitigate overfitting caused by few-shot learning, we compute the reconstruction loss
using augmented size-varying patches sampled from the image(s). We also propose a new adjacency-based
loss function for continuity, which allows the number of superpixels to be arbitrarily large whereby the cre-
ation of the sparse graph can remain fully unsupervised. We conduct quantitative and qualitative experiments
using computer vision images and videos, which show that segmentation becomes more accurate and robust
using our sparse loss functions and patch reconstruction. For comprehensive application, we use our method
to analyse 3D images acquired from X-ray and neutron tomography. These experiments and applications show
that our model trained with one or a few images can be highly robust for predicting many unseen images with
similar semantic contents; therefore, our method can be useful for the segmentation of videos and 3D images
of this kind with lightweight model training in 2D.
1 INTRODUCTION
Semantic segmentation aims to label all pixels in an
image based on its semantic contents. It is a funda-
mental problem in computer vision, serving as a ba-
sic element for many higher-level tasks, such as image
and video editing (Criminisi et al., 2010; Aksoy et al.,
2018; Zhang et al., 2020), scene understanding (Ver-
doja et al., 2017; Hofmarcher et al., 2019), and sci-
entific and medical image analysis (Chen et al., 2021;
Hsu et al., 2021; Xiao and Buffiere, 2021; Scatigno
and Festa, 2022). It is also a challenging problem,
not only for its large solution space, especially for
videos and 3D images, but also for its strong non-
convexity. Such non-convexity comes from two as-
pects: most images with non-trivial semantic con-
tents may have non-unique ground truths (i.e., dif-
ferent persons may label an image differently), and
many loss functions for segmentation are naturally
non-convex (Brown et al., 2012; Bianchi et al., 2020;
Lambert et al., 2021).
Recently, notable progresses have been made in
image segmentation using deep learning (Minaee
et al., 2021). End-to-end supervised learning has
achieved a high accuracy for many image sets, such
as U-Net (Ronneberger et al., 2015), SegNet (Badri-
narayanan et al., 2017), PSPNet (Zhao et al., 2017)
and DeepLab (Chen et al., 2017), and an increasing
number of their variations. These supervised models
require a large number of training data with ground
truth (or labels). However, labelling an image set at a
pixel level can be difficult. This is particularly acute
Leng, K., Atwood, R., Kockelmann, W., Chekrygina, D. and Thiyagalingam, J.
Unsupervised Few-Shot Image Segmentation with Dense Feature Learning and Sparse Clustering.
DOI: 10.5220/0012380700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
575-586
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
575

for scientific and medical images, which are usually
less semantically meaningful and have lower signal-
to-noise ratios. The supervised methods also face
several technical challenges, such as intensity inho-
mogeneity (Yu et al., 2020) and resolution-awareness
(Lin et al., 2017; Zhao et al., 2018).
Unsupervised learning provides a useful and at-
tractive alternative in the absence of labels. Most
unsupervised deep models are based on representa-
tion learning guided by some unsupervised or self-
supervised loss functions towards the goal of seg-
mentation. These loss functions can encourage seg-
mentation from different perspectives, such as fea-
ture clustering (Kanezaki, 2018; Moriya et al., 2018;
Kim et al., 2020; Zhou and Wei, 2020), graph cut
(Xia and Kulis, 2017; Bianchi et al., 2020; Eliasof
et al., 2022), patch similarity and dissimilarity (Yu
et al., 2018; Danon et al., 2019; Hsu et al., 2021),
and maximisation or invariance of information (Yin
et al., 2017; Ji et al., 2019; Ouali et al., 2020; Mir-
sadeghi et al., 2021). Though the unsupervised mod-
els are inevitably less accurate than the supervised
ones, they can circumvent the challenges around man-
ual labelling and offer fast solutions with acceptable
accuracy (e.g., significantly more accurate than con-
ventional baseline algorithms). The results can be
further refined by post-processing techniques, such as
the conditional random field (CRF) smoothing (Chen
et al., 2017; Xia and Kulis, 2017; Zhou and Wei,
2020). Another branch of the unsupervised family is
weak supervision by different forms of light annota-
tion, such as scribbles (Lin et al., 2016; Kim et al.,
2020), bounding boxes (Lempitsky et al., 2009) and
text tags (Yang et al., 2014), leading to better accuracy
and robustness with limited manual input. In general,
a model designed for unsupervised segmentation can
take in certain forms of weak supervision for perfor-
mance enhancement.
The work presented in this paper is motivated by
fully unsupervised segmentation of 3D tomographic
images obtained from X-ray and neutron imaging.
Given that these 3D images are composed of many 2D
slices with similar semantic contents (e.g., structural
and spectral characteristics), conceivably the most ef-
ficient approach for unsupervised segmentation is to
use one or a few slices to train a neural network capa-
ble of predicting all the other slices.
Kim et al. (Kim et al., 2020) proposed two
deep feature-based loss functions for unsupervised
segmentation: similarity and continuity. The former
encourages pixels with similar features to have the
same label while the latter encourages nearby pix-
els to have similar features. Feature learning in (Kim
et al., 2020), however, is driven solely by segmenta-
tion, whereas the two loss functions will eventually
lead to a uniform segmentation (i.e., all pixels hav-
ing the same label). We constrain the feature learn-
ing by image reconstruction using a segmentation-
motivated, CNN-based autoencoder (Xia and Kulis,
2017), as named the W-Net. Both (Kim et al., 2020)
and (Xia and Kulis, 2017) have used the target image
as the only input of the neural network. We observe
a high degree of overfitting when the model is trained
with a single image, as reflected by a strong depen-
dence of the resultant labels on model initialisation.
We reduce such overfitting by training the model us-
ing size-varying patches sampled from the target im-
age, followed by some augmentation (flip and rota-
tion). Some previous works have used the sampled
patches as a direct clue for segmentation (Yu et al.,
2018; Danon et al., 2019; Hsu et al., 2021), e.g., by
embedding their absolute or relative positions. In our
method, the patches are used only for reconstruction,
which serves as a regularisation term against overfit-
ting, whereas segmentation is always performed on
the whole image. This setup allows arbitrary patch
sampling and augmentation while constantly leading
to better segmentation results in all our experiments.
Using superpixels is a paradigm for image seg-
mentation (Kanezaki, 2018; Bianchi et al., 2020;
Ibrahim and El-kenawy, 2020; Eliasof et al., 2022),
which can significantly reduce the dimensionality and
improve the convexity of the problem. Using a fast al-
gorithm such as SLIC (Achanta et al., 2012) and the
compact watershed (Neubert and Protzel, 2014), one
can produce an over-segmentation of the target image
whereby the original dense segmentation problem can
be recast as labelling a set of superpixels or as par-
titioning a regional adjacency graph (RAG). We im-
plement the similarity and continuity losses of (Kim
et al., 2020) and the soft N-Cut loss of (Xia and Kulis,
2017) on superpixels, which prove to be more effi-
cient than their dense counterparts. In a work prior to
(Kim et al., 2020), the method outlined in (Kanezaki,
2018) has implemented the notions of similarity and
continuity on superpixels. However, they considered
“continuity” simply as all pixels in one superpixel be-
ing labelled the same, which can be insufficient when
the number of superpixels become large. This is un-
desirable because, only if a large number of super-
pixels are allowed, the workflow can remain as fully
unsupervised; otherwise, the superpixels or the RAG
must be prepared carefully to avoid any local under-
segmentation, which becomes a kind of weak super-
vision. In this paper, we further consider the conti-
nuity across neighbouring superpixels by a new loss
function based on the adjacency matrix of the RAG.
This sparse continuity loss allows the number of su-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
576

perpixels to be arbitrarily large (e.g., 10
3
∼ 10
4
in one
image) whereby preparing the over-segmentation re-
quires no human validation.
In a nutshell, we perform dense feature learning
using a W-Net with augmented patch reconstruction,
reducing the learned dense features onto a RAG for
sparse clustering driven by soft N-Cut, similarity and
continuity (adjacency-based). We conduct a quanti-
tative experiment using the BSDS300 dataset (Martin
et al., 2001), followed by two examples of predict-
ing long video clips using models trained with one
or a very few frames. We finally apply our method
to the segmentation of 3D images acquired from X-
ray and neutron tomography. Our code and experi-
ments can be found at https://github.com/stfc-sciml/
sp-wnet-seg.
2 METHOD
Our deep learning model consists of two parts: i)
dense feature learning with a fully-convolutional au-
toencoder, as described in Section 2.1, and ii) sparse
segmentation based on the dense features reduced
onto a RAG, as described in Section 2.3. Dense seg-
mentation can be viewed as a special case of sparse
segmentation; for better readability, we first describe
dense segmentation in Section 2.2.
2.1 W-Net and Patch Reconstruction
We use the W-Net architecture from (Xia and Kulis,
2017) for dense representation learning, as shown in
Fig. 1. The dimensions of the target image x are
(3, H, W ), respectively for colour, height and width.
Taking x as input, the encoding U-Net yields a latent
variable z with dimensions (C
f
, H, W ), where C
f
is
the number of features at each pixel, also capping the
total number of distinct labels. The dense features f
are channel-wise softmax of z, which serve as the soft
labels for dense segmentation, that is, f
pi j
being the
probability of pixel (i, j) belonging to the p-th seg-
ment. Taking f as input, the decoding U-Net yields
the image reconstruction x
′
. The reconstruction loss,
as denoted by L
rec
, can finally be computed by com-
paring x and x
′
. In our experiments, we simply use
the mean squared error (MSE).
An unsupervised model must be able to handle
the situation where one or a few images are avail-
able for both training and prediction, i.e., one- or
few-shot learning. However, a W-Net trained with
one or a few images can be greatly overfitted (e.g.,
the decoder may simply memorise the input image,
allowing the encoder to yield an arbitrary f), caus-
ing the quality of segmentation strongly dependent on
model initialisation. To alleviate the issues around
overfitting, we calculate the reconstruction loss us-
ing smaller patches sampled from the original im-
age, followed by simple augmentation (flip and rota-
tion). Note that these patches are used only for com-
puting the reconstruction loss, whereas the segmen-
tation losses will be computed using f inferred from
the whole image. Because the W-Net is fully con-
volutional, these patches can have different shapes;
in practice, we choose a few fixed shapes whereby
the patches of the same shape can be batched together
for efficient training. Besides, when the background
area predominates over the foreground, we can sam-
ple more patches from the foreground to balance the
training data. With their absolute or relative posi-
tions embedded, the sampled patches can provide ad-
ditional information for learning hierarchical features
in images (Danon et al., 2019; Hsu et al., 2021). We
do not use such information in our model; instead, we
enable the model to capture multi-scale features by si-
multaneously sampling small (e.g., 32 ×32) and large
(e.g., 256 × 256) patches for training.
2.2 Loss Functions for Dense
Segmentation
Dense segmentation aims for assigning each pixel a
label. Three differentiable loss functions from previ-
ous studies are introduced here: the soft normalised-
cut or soft N-Cut loss, the similarity loss and the con-
tinuity loss, as demonstrated in Fig 2. In the next sub-
section, we will extend these loss functions to sparse
segmentation.
The original W-Net paper (Xia and Kulis, 2017)
used the following soft N-Cut loss for segmentation:
L
cut
(f, x) = 1 −
C
f
∑
p=1
∑
i j
∑
kl
w(i, j; k, l) f
pi j
f
pkl
∑
i j
∑
kl
w(i, j; k, l) f
pi j
, (1)
where w(i, j;k, l) measures some distance between
pixel (i, j) and (k, l), e.g., the Euclidean distance in
the colour space,
w(i, j; k, l) =
r
∑
p
(x
pi j
− x
pkl
)
2
. (2)
Xia & Kulis (Xia and Kulis, 2017) showed that this
N-Cut loss was good at detecting sharp edges in the
image, usually yielding an over-segmentation for fur-
ther refinement. Clearly, the above pixel-based N-Cut
loss has poor scalability with respect to image size.
Originating from the graph theory, N-Cut is expected
to perform better when used on graph-based sparse
features.
Unsupervised Few-Shot Image Segmentation with Dense Feature Learning and Sparse Clustering
577
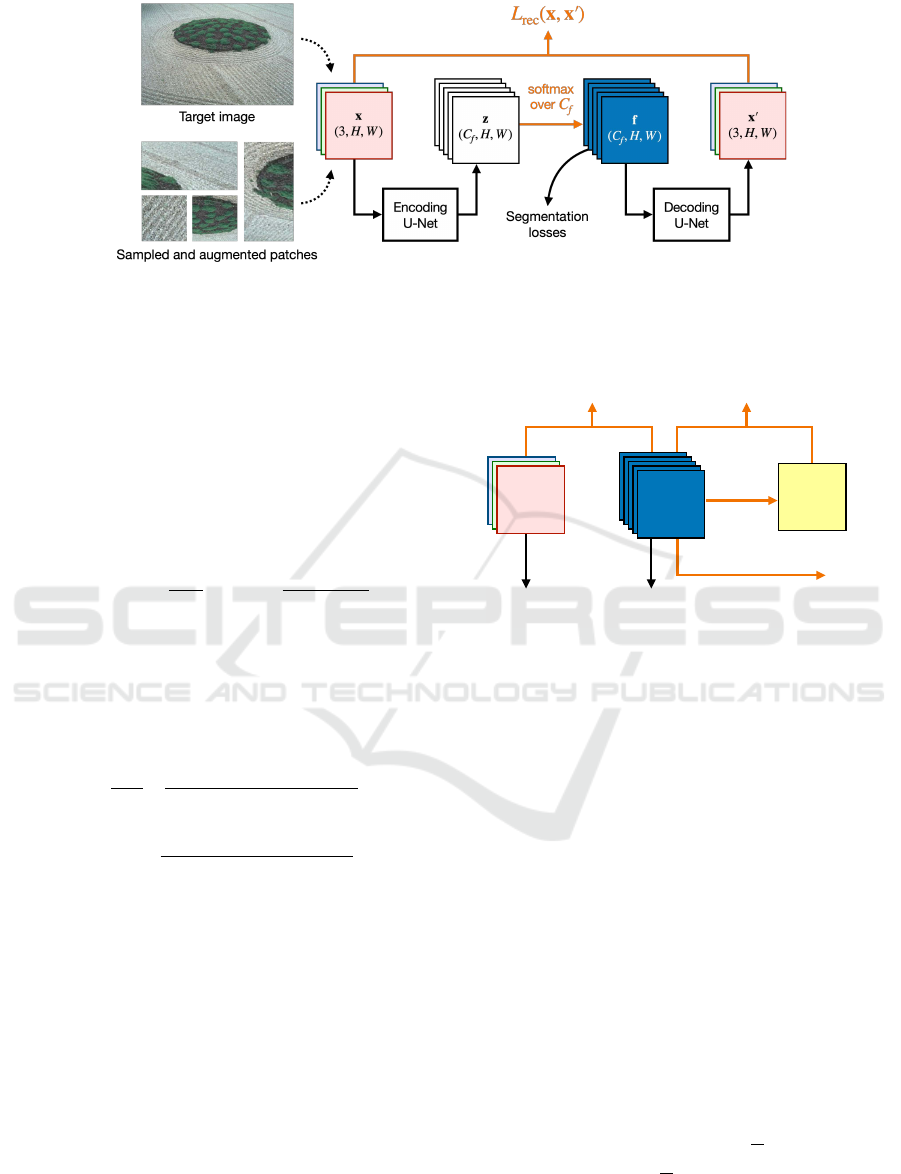
Figure 1: W-Net for dense representation learning with patch reconstruction. The full architecture of the encoding and the
decoding U-Nets can be found in (Xia and Kulis, 2017). The segmentation losses will be computed using the dense features
f, the soft labels for dense segmentation. The size-varying patches are sampled from the input image and then augmented
(flipped or rotated) for training.
The similarity and the continuity loss functions,
originally proposed by (Kim et al., 2020) and often
used together, promote segmentation by clustering f
from two complementary aspects: feature similarity
and spatial continuity. The similarity loss encourages
pixels with similar features to have same the label,
formulated as the cross entropy between f and the fi-
nal label y:
L
sim
(f, y) = −
1
HW
∑
i
∑
j
log
exp f
y
i j
i j
∑
p
exp f
pi j
, (3)
where y can be determined by the channel-wise
argmax of f, i.e., y
i j
= argmax
p
f
pi j
. The continuity
loss encourages spatially adjacent pixels to have iden-
tical features (measured in L1), making the segmen-
tation result less patchy:
L
con
=
∑
p
2C
f
∑
H−1
i=1
∑
j
| f
pi j
− f
p(i+1) j
|
(H − 1)W
+
∑
i
∑
W −1
j=1
| f
pi j
− f
pi( j+1)
|
H(W − 1)
!
.
(4)
Note that both the similarity and the continuity losses
will finally lead to a uniform segmentation, i.e., all
pixels having the same label. In (Kim et al., 2020),
the training terminates when the number of differ-
ent labels reaches a lower bound; our model does not
need this lower bound because the reconstruction loss
works as a counterbalance.
2.3 Loss Functions for Sparse
Segmentation
Using superpixels is a divide-and-conquer paradigm
in image and video segmentation. It can significantly
reduce the dimensionality and improve the convexity
of the problem, making the model more accurate and
Encoding!
U-Net
Decoding!
U-Net
L
cut
(f,x)
L1 of adjacent pixels
argmax!
over
C
f
y
(H,W)
L
sim
(f,y)
L
con
(f)
…
f
(C
f
,H,W)
x
(3,H,W)
Figure 2: Loss functions for dense segmentation. This fig-
ure and Fig. 1 form the complete architecture for dense seg-
mentation.
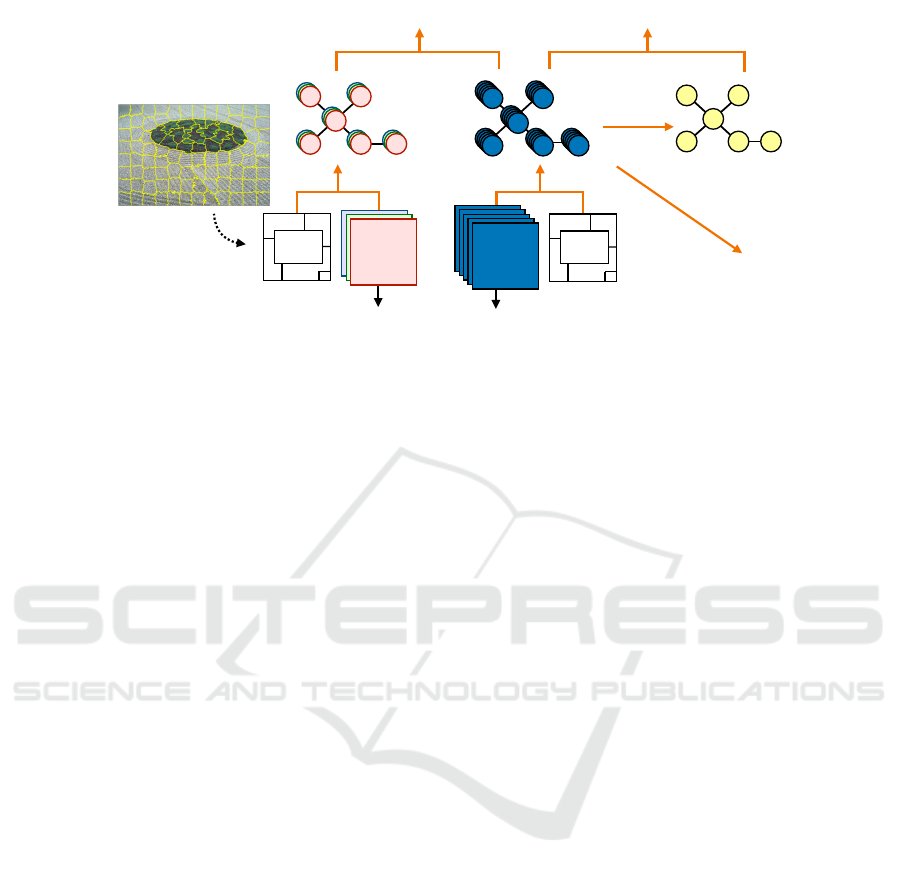
easier to train. In this subsection, we extend the above
three segmentation losses to superpixel-based sparse
segmentation. The architecture is shown in Fig. 3.
The first step is to determine a RAG based on the
target image, which can be done using a fast super-
pixel method such as SLIC (Achanta et al., 2012)
and the compact watershed (Neubert and Protzel,
2014). Producing a RAG of over-segmentation can
be viewed as a type of weak supervision, as any local
under-segmentation must be avoided manually. How-
ever, as long as a large number of superpixels are al-
lowed by our deep learning model, typically a few
hundreds to a few thousands, our method can remain
fully unsupervised. Suppose the RAG has N
s
super-
pixels, and the I-th superpixel contains n
I
pixels. Let
the RAG be represented by a set of dense labels de-
noted by s, that is, the I-th superpixel contains pixel
(i, j) if s
i j
= I. The target image x
pi j
can then be re-
duced to ˆx
pI
by mean colour, ˆx
pI
=
1
n
I
∑
{(i, j)|s
i j
=I}
x
pi j
,
and the features,
ˆ
f
pI
=
1
n
I
∑
{(i, j)|s
i j
=I}
f
pi j
.
Based on the reduced image and features, the
sparse extension of the soft N-Cut loss and the sim-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
578

ilarity loss is straightforward, mostly by replacing
pixel indices to superpixel indices. The sparse soft
N-Cut loss is given by
ˆ
L
cut
(
ˆ
f,
ˆ
x) = 1 −
C
f
∑
p=1
∑
I
∑
J
ˆw(I; J)
ˆ
f
pI
ˆ
f
pJ
∑
I
∑
J
ˆw(I; J)
ˆ
f
pI
, (5)
where ˆw(I;J) measures some distance between super-
pixel I and J, e.g., ˆw(I; J) =
q
∑
p
( ˆx
pI
− ˆx
pJ
)
2
. Simi-
larly, the sparse similarity loss is given by
ˆ
L
sim
(
ˆ
f,
ˆ
y) = −
1
N
s
∑
I
log
exp f
ˆy
I
I
∑
p
exp
ˆ
f
pI
, (6)
where ˆy
I
is the final label of superpixel I, which can
be determined by ˆy
I
= argmax
p
ˆ
f
pI
. Alternatively, ˆy
I
can be determined by the maximum occurrence of y
i j
among its encompassed pixels (Kanezaki, 2018), or
by K-means clustering of
ˆ
f
pI
along the superpixel di-
mension (to use K-means, change f
ˆy
I
I
in eq. (6) into
the centroid of the cluster that I belongs to).
The sparse continuity loss is aimed at uniforming
the features of adjacent superpixels, which is a major
innovation of this work. Let
ˆ
A
IJ
be the row-wise nor-
malised adjacency matrix of the RAG, that is,
ˆ
A
IJ
≥ 0,
and
ˆ
A
IJ
= 0 if superpixel I and J are non-adjacent (in-
cluding I = J), and
∑
J
ˆ
A
IJ
= 1. Under this definition,
∑
J
ˆ
A
IJ
ˆ
f
pJ
yields a weighted average of the p-th fea-
ture over all the neighbours of superpixel I. There-
fore, the continuity loss for sparse segmentation can
be written as
ˆ
L
con
=
1
C
f
N
s
∑
p
∑
I
∑
J
ˆ
A
IJ
ˆ
f
pJ
−
ˆ
f
pI
. (7)
The colour-based weights ˆw(I;J) can be used to deter-
mine
ˆ
A
IJ
. We will use the following softmax formula
in our experiments:
ˆ
A
IJ
=
e
−τ ˆw(I;J)
∑
K
e
−τ ˆw(I;K)
, (8)
where J and K are limited to the neighbours of I.
When the temperature τ = 0, the neighbours of I will
equally contribute to the weighted average
∑
J
ˆ
A
IJ
ˆ
f
pJ
;
otherwise, their contributions will depend on their
distance to I in the colour space. As the total number
of superpixels (N
s
) increases,
ˆ
A
IJ
will become larger
and sparser, which can be stored as a sparse tensor.
2.4 Total Loss Function
The total loss is a weighted sum of the reconstruction
loss and the segmentation losses (replacing L with
ˆ
L
for sparse segmentation):
L = β
rec
L
rec
+ β
cut
L
cut
+ β
sim
L
sim
+ β
con
L
con
, (9)
where the β’s are hyperparameters. Only for dense
segmentation, the above model degenerates to (Xia
and Kulis, 2017) when β
sim
= β
con
= 0 and patch
reconstruction is ignored, and to (Kim et al., 2020)
when β
rec
= β
cut
= 0. Note that our method is not
a simple combination of (Xia and Kulis, 2017) and
(Kim et al., 2020); we borrow their key concepts and
notably improve the accuracy and robustness of the
unsupervised, few-shot model with our augmented
patch reconstruction and sparse loss functions.
We suggest the following steps to fast tune the β-
values, fixing β
rec
= 1 and starting from β
sim
= β
con
=
0:
(i) Try β
cut
= {0.1, 1, 10} and select the best; avoid
under-segmentation at this step;
(ii) Fixing β
cut
, try β
sim
= β
con
= {0.1, 1, 10} and
select the best; increase β
con
if the result looks
too patchy, and decrease β
con
if the result suffers
under-segmentation; and
(iii) do fine-tuning if necessary.
3 EXPERIMENTS
3.1 Single-Image Benchmark
In this experiment, we evaluate our method using the
100 test images from BSDS300 (Martin et al., 2001).
For each image, we train models of nine types using
the same W-Net architecture but with different seg-
mentation and reconstruction losses. For the segmen-
tation losses, we consider pixel or superpixel ones
(Dense vs Sparse), and N-Cut alone or combining
similarity and continuity (NCut vs SimCon). Here, we
separate N-Cut from similarity and continuity to re-
duce the number of hyperparameters (β’s in eq. (9)).
For reconstruction loss, we consider a single image or
sampled patches (Image vs Patch). Such variability
leads to eight different model types in total:
1. Dense-NCut-Image,
2. Dense-NCut-Patch,
3. Dense-SimCon-Image,
4. Dense-SimCon-Patch,
5. Sparse-NCut-Image,
6. Sparse-NCut-Patch,
7. Sparse-SimCon-Image and
8. Sparse-SimCon-Patch.
The type Dense-NCut-Image is equivalent to the
original W-Net (Xia and Kulis, 2017). We train
an additional type of models, Dense-SimCon-NoRec,
Unsupervised Few-Shot Image Segmentation with Dense Feature Learning and Sparse Clustering
579
Encoding!
U-Net
Decoding!
U-Net
Reduce
argmax!
over
C
f
Reduce
L1 of adjacent nodes
̂
L
cut
(
̂
f,
̂
x)
̂
L
sim
(
̂
f,
̂
y)
̂
L
con
(
̂
f)
…
s
(H,W)
x
(3,H,W)
f
(C
f
,H,W)
s
(H,W)
̂
y
(N
s
)
̂
f
(C
f
,N
s
)
̂
x
(3,N
s
)
RAG
RAG
Figure 3: Loss functions for sparse segmentation. This figure and Fig. 1 form the complete architecture for sparse segmen-
tation. The RAG of the target image, as represented by its dense labels, s = {s
i j
}, is predetermined using a fast superpixel
method such as SLIC, which contains N
s
segments in total.
where NoRec means no reconstruction (i.e., decoder
unused), which corresponds to the original dense
model of (Kim et al., 2020). For each of these model
types, we consider ten random states for model initial-
isation and nine β-values for the segmentation losses
β = {5, 2, 1, 0.5, 0.2, 0.1, 0.05, 0.02, 0.01} while fix-
ing β
rec
= 1. The superpixels are prepared using SLIC
with from 3, 000 to 8, 000 segments. For each im-
age, we sample 232 patches in total: 32 × (96, 96) +
72×(64, 64)+128×(48, 48), each shape divided into
eight mini-batches. We use the Adam optimiser with
a learning rate of 10
−3
and train the models for 50
epochs.
To evaluate the outcomes of segmentation, we cal-
culate six clustering metrics: random index, adjusted
mutual information, the Fowlkes-Mallows index, ho-
mogeneity, completeness and V-measure. Here, we
emphasise the significance of homogeneity and com-
pleteness (V-measure being their harmonic mean)
from the angle of post-processing, aimed at refin-
ing the outcome of unsupervised segmentation, e.g.,
(Xia and Kulis, 2017). Homogeneity measures
how the resultant segmentation is close to a per-
fect over-segmentation, and completeness how that
is close to a perfect under-segmentation. For ex-
ample, our sparse model starts from homogeneity≈1
and completeness≈0 at the beginning of training. At
post-processing, it is much easier to merge a few seg-
ments from an over-segmentation than to separate dif-
ferent segments from an under-segmentation. There-
fore, a low completeness may be remedied by post-
processing while a low homogeneity tends to veto.
An unsupervised method should try to avoid low ho-
mogeneity while increasing completeness as much as
possible. Note that supervised metrics such as IoU
and F1 cannot be used without manually associating
the predicted and true labels.
The metric scores of the different models are
shown in Table 1, which can be summarised as fol-
lows. First, from a reconstruction perspective, us-
ing sampled patches (Patch) has led to higher scores
than using a single image (Image) and no reconstruc-
tion (NoRec). Second, sparse labelling (Sparse) has
achieved higher scores than dense labelling (Dense),
regardless of reconstruction or segmentation losses.
Finally, comparing N-Cut alone (NCut) to the combi-
nation of similarity and continuity (SimCon), the latter
has obtained higher scores for all the considered met-
rics except for homogeneity (where the difference is
small), indicating that N-Cut is more inclined toward
over-segmentation. In practice, these three segmenta-
tion losses can be used together for best performance.
3.2 Videos
The capability for 3D prediction is a critical property
of an unsupervised model trained with one or a few
2D images. One reason is that an unsupervised model
usually demands more efforts for hyperparameter tun-
ing and random state sampling, and such a capability
can make the best of these efforts. Here, we show
two video examples in Fig. 4. In (a), a jump from
a figure skater, we only use the first frame for train-
ing, and the resultant sparse model can well predict
the remaining frames containing the trajectory of the
motions of the skater. The dense models we trained
failed to find the boundary near the skater’s shoulders
(where his costume is ice-coloured). In (b), a cheetah
hunting a gazelle, we train a sparse model with three
frames: the first and the third are focused respectively
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
580

Table 1: Metric scores of different models for test images in BSDS300. The name of the dense and the sparse models are
explained in the text. The three baseline models are K-means on pixels, K-Means on superpixels, and spectral clustering
on superpixels. The six metrics are random index (RI), adjusted mutual information (A-MI), Fowlkes-Mallows index (FMI),
homogeneity (Homo), completeness (Comp), and V-measure (V-M). For each image and model type, we select the final model
(from ten random states × nine β-values) by the highest V-measure, based on which the other metrics are computed. The
results of some of the images are displayed in the Appendix.
Model type RI A-MI FMI Homo Comp V-M
Dense models Dense-NCut-Image 0.77 0.45 0.62 0.43 0.50 0.45
Dense-NCut-Patch 0.77 0.51 0.62 0.58 0.49 0.51
Dense-SimCon-Image 0.77 0.47 0.65 0.43 0.56 0.47
Dense-SimCon-Patch 0.80 0.55 0.70 0.52 0.63 0.55
Dense-SimCon-NoRec 0.78 0.52 0.67 0.49 0.59 0.52
Sparse models Sparse-NCut-Image 0.77 0.46 0.63 0.45 0.51 0.46
Sparse-NCut-Patch 0.79 0.55 0.64 0.63 0.52 0.55
Sparse-SimCon-Image 0.79 0.52 0.69 0.46 0.63 0.52
Sparse-SimCon-Patch 0.81 0.57 0.71 0.60 0.66 0.63
Baseline models Kmeans-Pixel 0.69 0.31 0.49 0.31 0.34 0.31
Kmeans-Superpixel 0.71 0.33 0.50 0.33 0.37 0.33
Spectral-Superpixel 0.72 0.39 0.55 0.39 0.43 0.39
on the cheetah and the gazelle, and in the second one,
the cheetah’s body is partially covered by a wisp of
grass. Dense segmentation could also outline the two
animals correctly but delivered an inferior accuracy
for depicting their boundaries in detail.
4 APPLICATION: X-RAY AND
NEUTRON IMAGING
Large-scale experimental facilities, such as linear ac-
celerators and synchrotrons using X-ray or neutron
sources, offer a powerful means for probing the in-
ternal structure of condensed matters from nano- to
micro-scales (Sivia, 2011). In this section, we train
models to segment 3D tomographic images obtained
from X-ray and neutron imaging.
Compared to real-world photographic images,
tomographic images are usually less semantically
meaningful, characterised by less definitive bound-
aries between parts and lower signal-to-noise ratios.
Unless the scanned sample has a very simple struc-
ture with strong contrasts, finding the ground truth of
segmentation is mostly impossible. However, in the
context of unsupervised segmentation, these 3D im-
ages can benefit from a high similarity between their
2D slices, allowing us to train a 2D model with one
or a few slices. In all the three experiments presented
here, we will use only one 2D slice for training.
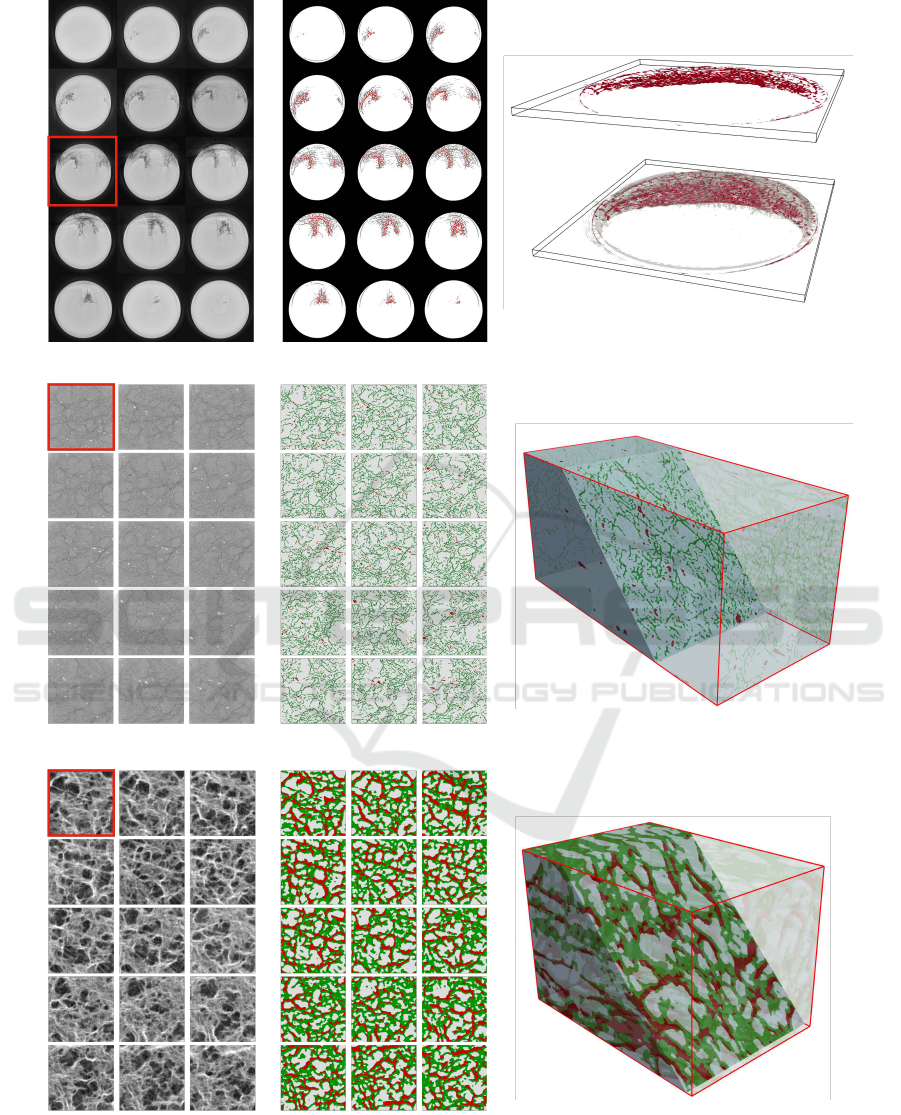
Figure 5 shows the target tomographic images and
their segmentation results. In (a), the foreground is
a thin crack in an Alloy 2205 duplex stainless steel,
scanned by X-ray tomography. The original images
are characterised by high-frequency, diffusive fea-
tures, which pose a great challenge to segmentation.
Therefore, we blur the slices with a Gaussian filter
and use its Hessian for segmentation, following (Kang
et al., 2020). In the second and the third examples, the
same rock core sample is scanned respectively by X-
rays and neutrons, but the tomographic images look
distinct. X-rays deliver a high-definition structure
containing micro-cracks and bright spots (possibly re-
gions containing high-Z elements). Neutrons, on the
other hand, yield a flocculent structure with lower res-
olution, highlighting regions of hydrogen-containing
minerals (red). We do not attempt to fuse the X-ray
and neutron data but treat them as two independent
problems. For all the three datasets, our segmentation
results turn out satisfactory by visual inspection, with
all structural features correctly detected and labelled.
Without the ground truths, however, we cannot per-
form quantitative evaluation on these results.
5 CONCLUSIONS
We have developed a new and easy-to-use deep learn-
ing method for fully unsupervised semantic segmen-
tation of images, which has achieved satisfactory ac-
curacy across a set of 2D images, videos and 3D
tomographic images. We use a W-Net architecture
for dense or pixel-based feature learning; the learned
dense features are reduced onto a regional adjacency
graph (RAG) whereby segmentation is achieved by
three sparse or superpixel-based loss functions, re-
spectively accounting for normalised cut, similarity
and continuity. Our sparse continuity loss allows
a large number of superpixels in the RAG so that
preparing the RAG can remain fully unsupervised.
Unsupervised Few-Shot Image Segmentation with Dense Feature Learning and Sparse Clustering
581
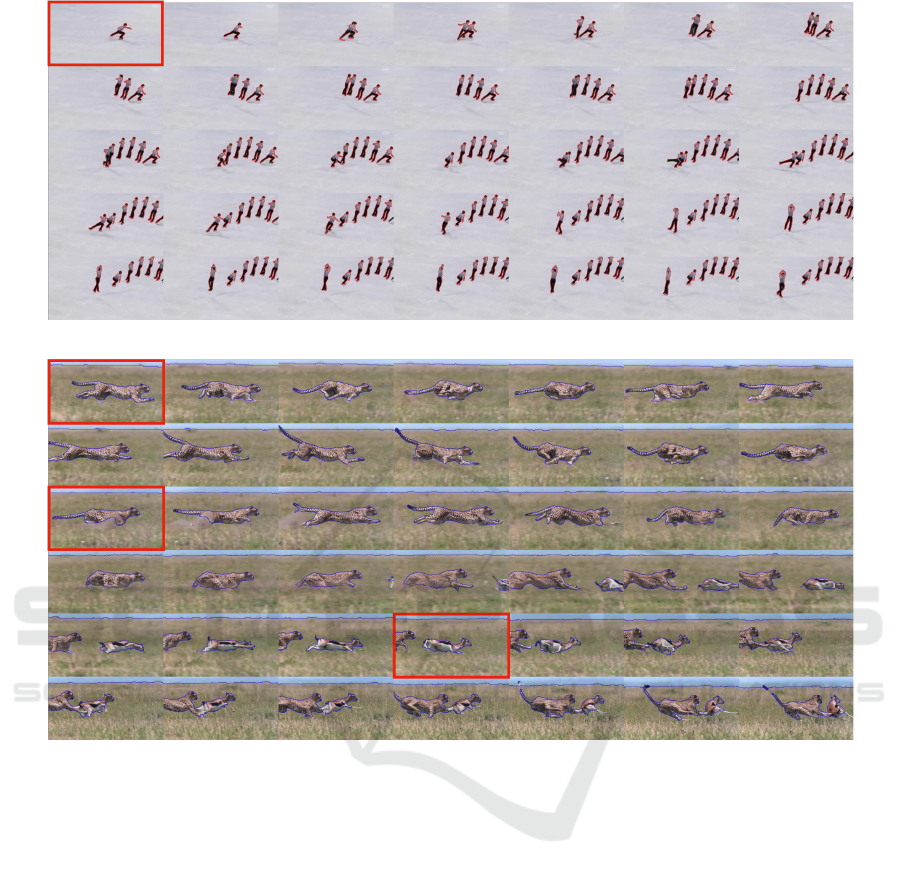
(a) A jump from a figure skater (80 frames).
(b) A cheetah hunting a gazelle (402 frames).
Figure 4: Unsupervised segmentation of videos. Only the boxed frames are used for training. For both (a) and (b), we use
Sparse-SimCon-Patch with β
sim
= β
con
= 0.1. For (a), patch sampling is limited to a small vicinity of the foreground.
Also, regularising segmentation with our augmented
patch reconstruction can greatly mitigate overfitting
caused by few-shot learning. This work has followed
the key concepts of (Xia and Kulis, 2017) and (Kim
et al., 2020), while having notably improved the per-
formance of the unsupervised, few-shot model with
the above novel techniques.
Our quantitative experiment on the BSDS300
dataset shows that using our patch sampling for re-
construction and performing segmentation on super-
pixels have led to more accurate and robust results.
We have also carried out qualitative experiments us-
ing videos and 3D images acquired from X-ray and
neutron tomography. These 3D experiments show
that our model trained with one or a few images (no
labels) can be highly robust for predicting unseen
images with similar semantic contents. Therefore,
our method can be powerful for the segmentation of
videos and 3D images of this kind with one- or few-
shot learning in 2D.
ACKNOWLEDGEMENTS
This work is funded by the Ada Lovelace Centre,
Rutherford Appleton Laboratory, Science and Tech-
nology Facilities Council. The computing resources
are funded by the IRIS initiative. The X-ray and neu-
tron data are obtained from the Diamond Light Source
and the ISIS Neutron and Muon Source, respectively.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
582
(a) A crack from X-ray imaging (30 slices).
(b) A rock from X-ray imaging (801 slices).
(c) A rock from neutron imaging (301 slices).
Figure 5: Unsupervised segmentation of 3D images from X-ray and neutron tomography. The original images are shown
on the left, the 2D labels in the middle and the 3D labels on the right. Only one slice (boxed) is used for training in each
case. We use Sparse-NCut-Patch with β
cut
= 1 for (a), Sparse-SimCon-Patch with β
sim
= β
con
= 0.002 for (b), and
Sparse-SimCon-Patch with β
sim
= β
con
= 0.1 for (c). Segmentation of (a) is based on the Hessian of the original images
smoothened by a Gaussian filter.
Unsupervised Few-Shot Image Segmentation with Dense Feature Learning and Sparse Clustering
583

REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
S
¨
usstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE transac-
tions on pattern analysis and machine intelligence,
34(11):2274–2282.
Aksoy, Y., Oh, T.-H., Paris, S., Pollefeys, M., and Matusik,
W. (2018). Semantic soft segmentation. ACM Trans-
actions on Graphics (TOG), 37(4):1–13.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
39(12):2481–2495.
Bianchi, F. M., Grattarola, D., and Alippi, C. (2020). Spec-
tral clustering with graph neural networks for graph
pooling. In International Conference on Machine
Learning, pages 874–883. PMLR.
Brown, E. S., Chan, T. F., and Bresson, X. (2012). Com-
pletely convex formulation of the chan-vese image
segmentation model. International journal of com-
puter vision, 98(1):103–121.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2017). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Chen, Q., Huang, Y., Sun, H., and Huang, W. (2021). Pave-
ment crack detection using hessian structure propaga-
tion. Advanced Engineering Informatics, 49:101303.
Criminisi, A., Sharp, T., Rother, C., and P
´
erez, P. (2010).
Geodesic image and video editing. ACM Trans.
Graph., 29(5):134–1.
Danon, D., Averbuch-Elor, H., Fried, O., and Cohen-Or, D.
(2019). Unsupervised natural image patch learning.
Computational Visual Media, 5(3):229–237.
Eliasof, M., Zikri, N. B., and Treister, E. (2022). Un-
supervised image semantic segmentation through su-
perpixels and graph neural networks. arXiv preprint
arXiv:2210.11810.
Hofmarcher, M., Unterthiner, T., Arjona-Medina, J., Klam-
bauer, G., Hochreiter, S., and Nessler, B. (2019). Vi-
sual scene understanding for autonomous driving us-
ing semantic segmentation. In Explainable AI: Inter-
preting, Explaining and Visualizing Deep Learning,
pages 285–296. Springer.
Hsu, J., Gu, J., Wu, G., Chiu, W., and Yeung, S.
(2021). Capturing implicit hierarchical structure in
3d biomedical images with self-supervised hyperbolic
representations. Advances in Neural Information Pro-
cessing Systems, 34:5112–5123.
Ibrahim, A. and El-kenawy, E.-S. M. (2020). Image seg-
mentation methods based on superpixel techniques: A
survey. Journal of Computer Science and Information
Systems, 15(3):1–11.
Ji, X., Henriques, J. F., and Vedaldi, A. (2019). Invariant
information clustering for unsupervised image clas-
sification and segmentation. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 9865–9874.
Kanezaki, A. (2018). Unsupervised image segmentation by
backpropagation. In 2018 IEEE international con-
ference on acoustics, speech and signal processing
(ICASSP), pages 1543–1547. IEEE.
Kang, D., Benipal, S. S., Gopal, D. L., and Cha, Y.-J.
(2020). Hybrid pixel-level concrete crack segmenta-
tion and quantification across complex backgrounds
using deep learning. Automation in Construction,
118:103291.
Kim, W., Kanezaki, A., and Tanaka, M. (2020). Unsuper-
vised learning of image segmentation based on dif-
ferentiable feature clustering. IEEE Transactions on
Image Processing, 29:8055–8068.
Lambert, Z., Le Guyader, C., and Petitjean, C. (2021). A
geometrically-constrained deep network for ct image
segmentation. In 2021 IEEE 18th International Sym-
posium on Biomedical Imaging (ISBI), pages 29–33.
IEEE.
Lempitsky, V., Kohli, P., Rother, C., and Sharp, T. (2009).
Image segmentation with a bounding box prior. In
2009 IEEE 12th international conference on computer
vision, pages 277–284. IEEE.
Lin, D., Dai, J., Jia, J., He, K., and Sun, J. (2016). Scribble-
sup: Scribble-supervised convolutional networks for
semantic segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 3159–3167.
Lin, G., Milan, A., Shen, C., and Reid, I. (2017). Refinenet:
Multi-path refinement networks for high-resolution
semantic segmentation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1925–1934.
Martin, D., Fowlkes, C., Tal, D., and Malik, J. (2001).
A database of human segmented natural images and
its application to evaluating segmentation algorithms
and measuring ecological statistics. In Proc. 8th Int’l
Conf. Computer Vision, volume 2, pages 416–423.
Minaee, S., Boykov, Y. Y., Porikli, F., Plaza, A. J., Kehtar-
navaz, N., and Terzopoulos, D. (2021). Image seg-
mentation using deep learning: A survey. IEEE trans-
actions on pattern analysis and machine intelligence.
Mirsadeghi, S. E., Royat, A., and Rezatofighi, H. (2021).
Unsupervised image segmentation by mutual infor-
mation maximization and adversarial regularization.
IEEE Robotics and Automation Letters, 6(4):6931–
6938.
Moriya, T., Roth, H. R., Nakamura, S., Oda, H., Nagara,
K., Oda, M., and Mori, K. (2018). Unsupervised seg-
mentation of 3d medical images based on clustering
and deep representation learning. In Medical Imaging
2018: Biomedical Applications in Molecular, Struc-
tural, and Functional Imaging, volume 10578, pages
483–489. SPIE.
Neubert, P. and Protzel, P. (2014). Compact watershed
and preemptive slic: On improving trade-offs of su-
perpixel segmentation algorithms. In 2014 22nd in-
ternational conference on pattern recognition, pages
996–1001. IEEE.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
584

Ouali, Y., Hudelot, C., and Tami, M. (2020). Autoregressive
unsupervised image segmentation. In European Con-
ference on Computer Vision, pages 142–158. Springer.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Scatigno, C. and Festa, G. (2022). Neutron imaging and
learning algorithms: New perspectives in cultural her-
itage applications. Journal of Imaging, 8(10):284.
Sivia, D. S. (2011). Elementary scattering theory: for X-ray
and neutron users. Oxford University Press.
Verdoja, F., Thomas, D., and Sugimoto, A. (2017). Fast
3d point cloud segmentation using supervoxels with
geometry and color for 3d scene understanding. In
2017 IEEE International Conference on Multimedia
and Expo (ICME), pages 1285–1290. IEEE.
Xia, X. and Kulis, B. (2017). W-net: A deep model for fully
unsupervised image segmentation. arXiv preprint
arXiv:1711.08506.
Xiao, C. and Buffiere, J.-Y. (2021). Neural network seg-
mentation methods for fatigue crack images obtained
with x-ray tomography. Engineering Fracture Me-
chanics, 252:107823.
Yang, W., Luo, P., and Lin, L. (2014). Clothing co-parsing
by joint image segmentation and labeling. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 3182–3189.
Yin, S., Qian, Y., and Gong, M. (2017). Unsupervised hi-
erarchical image segmentation through fuzzy entropy
maximization. Pattern Recognition, 68:245–259.
Yu, H., He, F., and Pan, Y. (2020). A survey of level
set method for image segmentation with intensity in-
homogeneity. Multimedia Tools and Applications,
79(39):28525–28549.
Yu, J., Huang, D., and Wei, Z. (2018). Unsupervised im-
age segmentation via stacked denoising auto-encoder
and hierarchical patch indexing. Signal Processing,
143:346–353.
Zhang, J., Yang, P., Wang, W., Hong, Y., and Zhang, L.
(2020). Image editing via segmentation guided self-
attention network. IEEE Signal Processing Letters,
27:1605–1609.
Zhao, H., Qi, X., Shen, X., Shi, J., and Jia, J. (2018).
Icnet for real-time semantic segmentation on high-
resolution images. In Proceedings of the European
conference on computer vision (ECCV), pages 405–
420.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017).
Pyramid scene parsing network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2881–2890.
Zhou, L. and Wei, W. (2020). Dic: deep image clustering
for unsupervised image segmentation. IEEE Access,
8:34481–34491.
Unsupervised Few-Shot Image Segmentation with Dense Feature Learning and Sparse Clustering
585

APPENDIX
Figure 6 shows the segmentation results for some of
the test images from BSDS300.
Figure 6: Segmentation results for some test images in BSDS300. The first and second columns show the input images and
their ground truths. The third column contains the results from Spectral-Superpixel, a baseline solution using spectral
clustering on the superpixels. The fourth and the fifth columns show the results from two of our dense models, respectively
corresponding to the models of (Xia and Kulis, 2017) and (Kim et al., 2020). The last two columns show the results from two
of our sparse models using different segmentation losses.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
586
