
Evolutionary-Based Ant System Algorithm to Solve the Dynamic Electric
Vehicle Routing Problem
Simon Caillard and Rachida Ben Chabane
Laboratory CESI Lineact, 2 all
´
ee des Foulons, Parc des Tanneries, Strasbourg, France
Keywords:
Dynamic Electric Vehicle Routing Problem, Ant Colony Optimization, Evolutionary Algorithms, Immigrant
Scheme, Memory Based.
Abstract:
This article addresses the Dynamic Electric Vehicle Routing Problem with Time Windows (DEVRPTW) using
a hybrid approach blending genetic and Ant Colony Optimization (ACO) algorithms. It employs an Ant Sys-
tem algorithm (AS) with an integrated memory system that undergoes mutations for solution diversification.
Testing on Schneider instances under static and dynamic conditions, with run time of 10 and 3 minutes respec-
tively, reveals promising results. Compared to static solutions, deviations of 8.55% and 2.38% are observed
in vehicle count and total distance. In a dynamic context, the algorithm maintains proximity to static results,
with 10.99% and 4.41% deviations in vehicle count and distance. Instances R1 and R2 present challenges,
suggesting potential improvements in memory and pheromone transfer during re-optimization.
1 INTRODUCTION
The environmental impact of economic and techno-
logical growth, emphasize the role of fossil fuel com-
bustion in greenhouse gas (GHG) emissions and cli-
mate change. The transportation sector, a major fos-
sil fuel consumer, contributed significantly to GHG
emissions in the EU. As a response, governments
globally implemented policies to reduce emissions
and fossil fuel use. The EU set ambitious goals to
decrease GHG emissions by 80-95% by 2050 com-
pared to 1990 levels. In last decade, Electric vehi-
cles (EVs) have gained popularity for their environ-
mental benefits, like zero GHG emissions and energy
efficiency. Notable companies like FedEx and DHL
have incorporated EVs into their fleets, with examples
of substantial fleet expansions and new deployments.
While EVs offer advantages, they face challenges in-
cluding limited range, longer charging times, higher
costs, and a developing charging infrastructure.
The Vehicle Routing Problem (VRP) involves
finding efficient routes for a fleet of vehicles to
meet customer demands and has been first introduced
by (Dantzig and Ramser, 1959). With time, vari-
ations like Capacitated-VRP, Heterogeneous-Fleet-
VRP, and Time-Dependent-VRP have introduced spe-
cific constraints (Kumar and Panneerselvam, 2012),
and more recently Electric Vehicle Routing Problems
(EVRP) has emerged (Erdo
˘
gan and Miller-Hooks,
2012). EVRP studies extend VRP concepts, but face
complexity due to limited electric vehicle range and
recharging needs. This introduces challenges like
station placement, recharging policies, and various
charging functions and many works focus on the ex-
tension related to EVRP (Qin et al., 2021; Erdeli
´
c
et al., 2019). Nevertheless, the existing methods
primarily address static scenarios, where all data is
known in advance. However, real-world applica-
tions often face dynamic environments. This study
emphasizes the Dynamic Electric VRP (DEVRP), a
more challenging problem that requires not only find-
ing optimal solutions quickly but also adapting to
data changes (Mavrovouniotis and Yang, 2015). A
common approach in handling DEVRP involves two
phases (Leal and Silva Junior, 2020): first, gener-
ating routes for confirmed clients using static tech-
niques, and second, periodically re-optimizing routes
throughout the working day to adapt the solutions
provided to the arrival of new customers requests.
Many technics have been used to solve (E)VRP
and its variants. The most known to achieve very good
results are the local search, variable neighborhood
search, large neighborhood search, etc. (Erdeli
´
c et al.,
2019). Among them, we found Ant Colony Optimiza-
tion (ACO) algorithms that can achieve similarly re-
sults (Thymianis et al., 2022). However, ACO are pri-
marily designed for static optimization (Dorigo et al.,
1996), aiming for rapid convergence to a global or
Caillard, S. and Ben Chabane, R.
Evolutionary-Based Ant System Algorithm to Solve the Dynamic Electric Vehicle Routing Problem.
DOI: 10.5220/0012379200003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 285-293
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
285

near-global optimum. A challenge arises in dynamic
optimization scenarios, where residual pheromone
trails from previous environments can bias the pop-
ulation towards the old optimum. This hinders the
tracking of the evolving optimum, making it difficult
for ACO to adapt once it converges on a solution. One
straightforward but often inefficient approach to dy-
namic problems is to treat them as a series of static
instances by resetting pheromone trails and solving
from scratch after each change (Mavrovouniotis and
Yang, 2013). In dynamic environments, ACO algo-
rithms can benefit from prior pheromone trails. When
the current conditions resemble previous ones, these
trails can speed up optimization (Guntsch and Mid-
dendorf, 2002). However, the algorithm needs to be
flexible enough to either integrate the knowledge from
these trails or discard them if they are outdated and
no longer relevant to the new environment. More re-
cently, ACO are combined with local/variable neigh-
borhood search algorithms to enhance quickly their
results (Mao et al., 2020; Wu and Gao, 2023)
Numerous strategies have been put forth and in-
tegrated with ACO to reduce re-optimization time
while efficiently preserving output quality. These
strategies fall into several categories: enhancing di-
versity following a dynamic change (Mavrovounio-
tis and Yang, 2013), sustaining diversity throughout
execution (Eyckelhof and Snoek, 2002), memory-
based schemes (Mavrovouniotis and Yang, 2012), hy-
brid/memetic algorithms (Wang et al., 2021) and im-
migrant schemes (Mavrovouniotis and Yang, 2012).
For the last one, a subset of newly generated ants (the
immigrant ants), replace the weakest ants in the cur-
rent population. The approach to generating immi-
grant ants differs. For example, random immigrants
represent random solutions to the problem (Mori
et al., 1996), while elitism- or memory-based immi-
grants present solutions that deviate slightly from the
best solution of a previous environment (Yang, 2008).
This paper particularly delves into immigrant
schemes for the DEVRP, where the immigrant ants
represent a viable VRP solution. The contributions of
this study can be summarized as follows: We extend
EVRPTW into dynamic pickup environment, which
is more practical and propose an Ant System algo-
rithm using evolutionary concept and an immigrant
scheme to solve it. The results are validated through-
out a series of test instances derivated from those of
Solomon, a well-known benchmark. The rest of this
paper is outlined as follows. 2 formally presents the
DEVRP and the structure of a solution. Section 3 de-
scribes the proposed ACO algorithm. Section 4 intro-
duces DEVRP benchmarks, generated from those of
Solomon, and evaluates empirically the performance
of the proposed method. The final section concludes
this paper with discussions on future works.
2 FORMALIZATION OF THE
DEVRPTW AND ITS SOLUTION
The formulation of the DEVRPTW proposed in this
paper is based on the one provided by (Schneider
et al., 2014). It can be modeled as a complete directed
graph G = (V
′
,A). V
′
= V ∪ F ∪ {0,N + 1} repre-
sents the set of vertices with V = {1,.. ., N} and F
respectively the set of customers and recharging sta-
tions. Vertices 0 and N + 1 corresponds to the same
depot, and each routes starts at 0 and ends at N + 1.
A = {(i, j) ∈ V
′
|i ̸= j} is the set of arcs. To each arc
is associated a distance d
i, j
and a travel time t
i, j
. To
each vertex i ∈ V
′
is associated a pick-up demand q
i
, a
service time s
i
, a time rt
i
at which the request of cus-
tomer i is know, and a time windows [e
i
,l
i
] in which
the service has to start. So, the service cannot start
before e
i
or after l
i
, but might end later. We note that
∀i ∈ {0, N + 1} ∪ F, q
i
= 0, s
i
= 0 and rt
i
= 0. In
addition, we note n f
i
= f ∈ F|min d
i, f
, the nearest
recharge station to customer i. The planning horizon
H = [e
0
,l
0
] corresponds to the opening time windows
of the depot, and the recharge stations are generally
available on the entire horizon. There is a set of ve-
hicles U and for each vehicle u, C
u
and Q
u
repre-
sent respectively its total loading and battery capac-
ities. When an arc {i, j} ∈ A is traveled by a vehicle,
a quantity of e · d
i, j
of the remaining battery charge
is consumed, with e which corresponds to the con-
stant charge consumption rate. At a recharging sta-
tion, the time required for recharging depends on the
difference between the current charge level and the
battery capacity. This recharging process occurs at a
rate of d which is linear. In other words, the duration
of recharging is influenced by the initial energy level
of the vehicle upon arrival at the station. The function
C
u
(i) allows us to know the remaining battery capac-
ity of vehicle u ∈ U when it arrives at vertex i ∈ V
′
.
Several constraints and assumptions must be ful-
filled to ensure a valid solution. They are listed above:
• The sum of the pick-up demands of the customers
visited by a vehicle must not exceed its capacity.
• Each route must starts (vertex 0) and ends (vertex
N + 1) at the depot.
• A customer can be visited only during its time
windows availability.
• Each client must be served at most once.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
286

• The pick-up demand fulfillment of each customer
must be guarantee.
• The battery level of each vehicle must never falls
below 0.
• After leaving the depot and each charging station,
the battery is brought back to full charge.
• The flow conservation constraints must be re-
spected: the number of incoming arcs is equal to
the number of outgoing arcs.
• The time feasibility must be respected for arcs
leaving a vertex: when considering two vertices, i
and j, the arrival time at vertex i, increased by the
combined travel time from i to j and service du-
ration (or recharge time) at i, must be shorter than
the arrival time at vertex j.
• There are at most as many simultaneous routes as
there are vehicles.
As mentioned earlier, there are different types of dy-
namics, with the most common, and the one studied in
this paper, being the arrival of new customer requests
during the day. Therefore, customer requests are not
fully known in advance, but arrive dynamically during
the parcel retrieval process. Consequently, to incorpo-
rate these new requests, the routes must be promptly
re-planned, either immediately or every xx minutes
in the case of continuous or periodic re-optimization.
Then, the DEVRPTW is considered as a sequence of
instances which slightly differ from each other.
A common approach for addressing DEVRPTW
is known as the ”least-commitment strategy.” This
strategy hinges on two distinct scenarios regarding
interaction with the planned solution. The problem
is deemed preemptive if, upon receiving a new cus-
tomer request, a vehicle can divert from its current
route to serve the new customer. In contrast, the non-
preemptive approach, adopted in this paper, means
that once a vehicle is en route to its next destination,
it must adhere strictly to this trajectory, without al-
lowance for deviations or interruptions at this stage of
the route. A crucial aspect of dynamic routing prob-
lems is establishing a metric to quantify the level of
dynamism in the problem: the degree of dynamism. It
is a value within [0,1], defined as the ratio between the
quantity of dynamic customers (those that are known
after e
0
) and the overall number of customer. If the
degree of dynamism is 0, the instance is static and
then all customer are already known before e
0
.
To help the general comprehension of this papers,
additional notations are introduced because of the dy-
namic context. When the periodic re-optimization oc-
curs, a new instance must be resolved, in which one
or more new clients has arrived during the horizon H.
So, it is necessary to track the position of the vehi-
cles over time: we introduce functions pos(u,h) and
time(u,i). The first one returns the vertex i at which
vehicle u stands at time h. The second gives the time h
at which vehicle u ∈ U visits i. These functions allow
us to compute the couple avail
u
= (h,i) and know-
ing precisely where and when each vehicle will be
available when the periodic re-optimization occurs,
because we are in a dynamic and non-preemptive con-
text.
A solution to the DEVRPTW can be expressed as
a sequence of routes followed by a vehicle. A route
is defined as sequence of vertices (customers and/or
recharge stations) starting and finishing respectively
at vertices 0 and N + 1. Let Π = r
1
,r
2
,. .. ,r
|Π|
be a
solution to the DEVRPTW. ∀r ∈ Π, r ⊆ V
′
, and r =
0,. .. ,N +1 is a path in G representing a vehicle route.
To asses the quality of a solution Π, we use the
function (F)
tot
, given by equation (1). The objective
is to determine a solution for which the number of un-
visited customers, the number of routes and the total
distance traveled are minimized.
F
tot
(Π) = F
cust
+ F
rte
(Π) + F
dist
(Π) (1)
With F
cust
, F
rte
(Π) and F
dist
(Π) that represent re-
spectively the number of unvisited customer, the num-
ber of routes and the total distance traveled for the
solution Π. These objectives are hierarchical, which
means that a solution with no unvisited customers will
be better than another with 1 or more unvisited cus-
tomers and a lower total distance traveled.
Figure 1 shows the graph representation of the
DEVRPTW for a small instance. In this problem
V = {0,1,2, 3,4}, and F = { f
1
}. Around each ver-
tex, we found the data relating to it. For example, for
vertex 1, q
1
= 2, s
1
= 1, rt
1
= 3, e
1
= 5 and l
1
= 10.
Vertex 0/4 is the depot and its interval of availabil-
ity corresponds to its opening hours. f
1
is a recharge
station which is available on the entire horizon. More-
over, there are 2 vehicles with a capacity of 5, a bat-
tery capacity of 6 and a consumption rate of 1. The
weight on each arc correspond to the travel time and
to the distance between vertex. It is assumed to be
equal to facilitate computation in this example.
At time 0, Π = {{0,2, f
1
,3, 4}} is a solution to
this instance whose evaluation F
tot
(Π) = 0 +1 + (2 +
3 + 4 +1) = 12. This solution is composed of 1 route
that visits vertices 0, 2, f
1
, 3 and 4. The vertex 1
is not known at this moment. In details, the vehicle
starts at the depot at time 0 and arrives at vertex 2 at
time 2 (travel time required to go from 0 to 2) and
leave it at time 2 + 2 = 4 (travel time + service time).
Then it visits vertex f
1
at time 7 and so on. Because
the consumption rate h = 1, the vehicle has consumed
1 · (2 + 3 + 4 + 1) = 10 unit of the battery.
Evolutionary-Based Ant System Algorithm to Solve the Dynamic Electric Vehicle Routing Problem
287
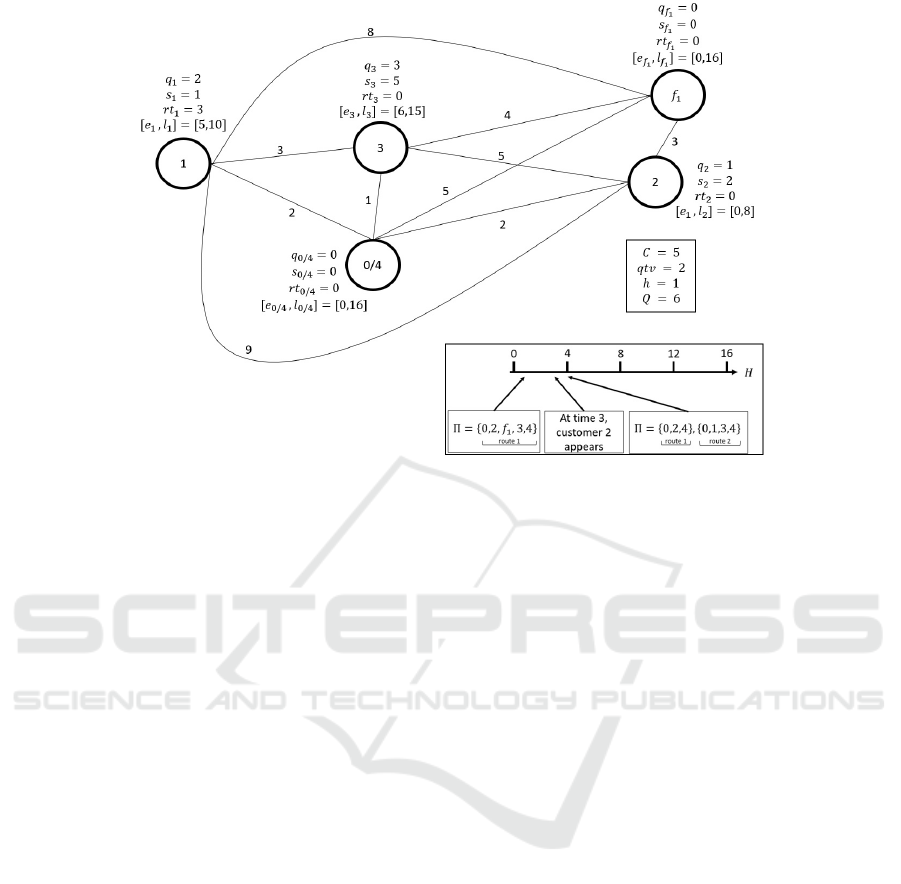
Figure 1: Graph representation of the DEVRPTW and of a solution.
When the periodic re-optimization occurs, cus-
tomer 1 is known. It is arrived at time 3 but is take
into account only at time 4. At this moment, the ve-
hicle on route 1 has finished to serve client 2. Since
vehicle 1 lacks the necessary battery capacity and re-
quires charging times due to the distance, it won’t be
able to reach customer 1 within its availability win-
dow. In this context, it is necessary to add a route
to serve the customers. Then at time 4, a solution
could be Π = {{0,2, 4},{0, 1,3,4}}. Its evaluation
F
tot
(Π) = 0 + 2 + ((2 + 2) + (2 + 3 +1)) = 12.
3 EVOLUTIONARY-BASED ANT
SYSTEM
3.1 General Framework
To help the construction of solutions, most of the
ACO algorithms rely on heuristics in addition to
pheromones that store the information about the best
generated solutions. In comparison, evolutionary al-
gorithms form an active population carried over be-
tween iterations using selection methods. In this
study, we propose a population-based ants system
which maintain a population consisting in the best
ants encountered from the start of the algorithm. The
aim is to sustain diversity within this population and
transmit knowledge to the pheromone trails. When
similarities between the population reach a predefined
level, the pheromone trails and the population are par-
tially reset. In order to store the population over each
iteration it: some ants are removed while others are
added, it is imperative to establish a memory M
it
of
size M
s
. Indeed, to constitute the the memory M (i)
of the iteration i, the M
s
best ants generated at this
iteration are faced in tournament with the set of ants
M (i − 1) which were retained from the previous iter-
ation.
Figure 2 details the general process of our algo-
rithm. While a preset time limit is not reached, at each
iteration: (1) ants build solutions using heuristic and
pheromones information, (2) if the similarity between
the best ant ever encountered and the ants generated
in this iteration exceeds a predefined threshold, both
the pheromone matrix and the currently memorized
population are reset, else the population in memory is
updated through a confrontation between the best ants
generated in this iteration and those currently stored,
(3) some ants in the memory undergo mutations (4)
the ants deleted from the population in this iteration
remove their pheromones, then all the ants in mem-
ory deposit pheromones and (5) if it is time for peri-
odic re-optimization, then the data of the instance are
updated and the pheromones matrix is reinitialized.
At the start of the algorithm, the current time
h = 0, the population at iteration M (0) =
/
0 and the
matrix of pheromones τ of size V
′
×V
′
, is initialized
at τ
init
= 1/F
tot
(Π
init
), where Π
init
corresponds to a
solution constructed using a greedy heuristic based
on the distance to next customer and taking into ac-
count both the commencement and duration of its
time window. Moreover, for each vehicle u ∈ U,
avail
u
= (0,0). This last value may differ when the
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
288
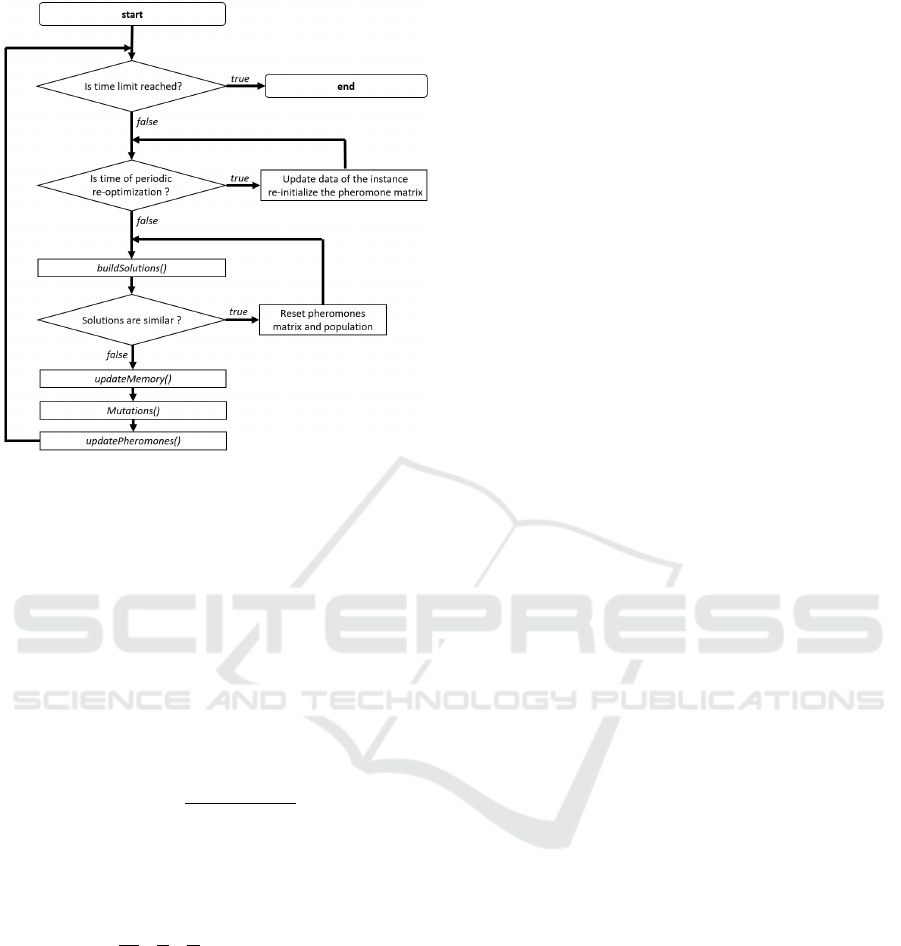
Figure 2: Flowchart of the proposed algorithm.
periodic re-optimization occurs.
3.2 Function buildSolutions()
A set of antQty ants generate solution, starting from
the depot (see the constraints described in section 2).
Each ant built his own solution, selecting the next ver-
tex to visit according to the random proportionality
rule that rely on the probability p
k
i, j
. This probability
is based on both heuristic and pheromones informa-
tion and is described in equation 2.
p
k
i, j
=
τ
α
i, j
· η
β
i, j
∑
j∈UN
k
i
τ
α
i, j
· η
β
i, j
(2)
Where p
k
i, j
is the probability to visit vertex j when
ant k is located at client i, τ
i, j
represents the exist-
ing pheromone trail on the arc between customers i
and j, η
i, j
=
1
d
i, j
·
h
i
l
j
·
e
j
l
j
, with h
i
the time at which
the vehicle is scheduled to depart from i, corresponds
to the heuristic information that prioritizes the closest
customers, whose time windows are short and which
will soon close, UN
k
i
is the set of available unvisited
neighborhood customers for ant k when it stands on
vertex i: those for which h
i
+ t
i, j
≤ l
j
. α and η are
coefficient that specify the relative importance of re-
spectively pheromones and heuristic information. We
note that if a vehicle arrives at a customer j before the
start e
j
of its time windows, the vehicle wait until this
moment before starting the service of j.
When selecting the next customer would result in
an impractical solution (e.g., exceeding the maximum
vehicle loading or battery capacities), the depot or
a recharge station is selected depending of the con-
straint violated (battery capacity, or loading capacity)
. Note that if the vehicle does not have enough battery
to return to the depot, then the nearest charging station
is selected. A vehicle returning to the depot implies
the start of a new vehicle route. This sequence con-
tinues until all customer demands are met, ultimately
leading to a feasible DEVRPTW solution constructed
by an ant. The quantity of routes in a solution deter-
mines the number of vehicles used.
Taking into account the current customer i, the
previously chosen next customer j, the constraint as-
sociated with battery consumption and the constraint
related to vehicle loading capacity, there are several
scenarios that compel the vehicle to either proceed to
a charging station or return to the depot:
Battery Capacity: there is not enough battery to go
from customer i to j (C
u
(i) − e · t
i, j
≤ 0), or once
arrived at customer j, there is not enough battery
to reach the nearest charging station n f
j
(C
u
(i) −
e · (t
i, j
+ t j, n f
j
≤ 0). In both cases, the nearest
charging station n f
i
is selected.
Load Capacity: if the request q
j
of the next cus-
tomer j leads to the vehicle’s capacity being ex-
ceeded, then the depot N + 1 is selected only if
there are enough remaining battery to reach it,
otherwise the nearest charging station n f
i
of cur-
rent customer i, is selected. We note that n f
i
is
always reachable because of the checks related to
the battery consumption constraint.
An iteration it is concluded once all ants have created
workable solutions, resulting in the generation of a
population P
it
.
3.3 Function updateMemory()
Prior to updating the memory, updateMemory()
checks that the algorithm did not converged toward a
local minimum. We can ensure that a local optimum
is reached when the similarities between the best and
worst solutions obtained at a given iteration exceed
a predetermined threshold (for example: 95%). This
behavior means that some pheromones are too high
compared to others, so the algorithm constructs al-
most identical solutions.
If a local optimum is reached, a re-initialisation of
the memory and of the pheromones matrix occur. The
rate ξ(it) is computed. It defines how close are the so-
lutions generated at this iteration it, thanks to the met-
ric comp(Π
1
,Π
2
) which compare solutions pairwise.
This computation of ξ(it) is detailed in equation 3.
Evolutionary-Based Ant System Algorithm to Solve the Dynamic Electric Vehicle Routing Problem
289

ξ(it) =
∑
Π
1
,Π
2
∈P
it
|Π
1
̸=Π
2
comp(Π
1
,Π
2
)
|P
it
|
with
comp(Π
1
,Π
2
) = 1
CE(Π
1
,Π
2
)
|V
′
| + avg(|Π
1
|,|Π
2
|
(3)
Where CE(Π
1
,Π
2
) denotes the shared edges be-
tween solutions Π
1
and Π
2
, and avg(|Π
1
|,|Π
2
|) rep-
resents the average number of routes for Π
1
and Π
2
.
The closer ξ is to 0, the more similar the solutions are,
and if it is less than an predefined threshold M
reset
,
a re-initialisation of the pheromone matrix and the
memory is triggered: all the pheromones of τ are set
to τ
init
and M
it
=
/
0.
If the re-initialisation is not triggered, then the
memory is updated. This process is done using a sys-
tem of tournament in which the solutions of P
it
and
M
it−1
confront each other. From P
it
∪M
it−1
, function
updateMemory() (see algorithm 1) randomly selects
M
s
couple of solutions that are compared using our
objective function F
tot
. This function ensures a new
memory M
it
for the iteration it and del
it
, a set of so-
lutions that are no longer in the memory and which
will be used when updating the pheromones of this
iteration it.
Require: M
it−1
, P
it
Ensure: M
it
, del
it
1: del
it
←
/
0, M
it
←
/
0
2: ξ(it) ← computeXi(P
it
)
3: if ξ(it) ≤ M
reset
then
4: del
it
← M
it−1
, M
it
←
/
0
5: else
6: duo ←
/
0, bu f f er ← M
it−1
∪ P
it
7: while bu f f er ̸=
/
0 do
8: (Π
1
,Π
2
) ← randomChoiceTwice(bu f f er)
9: bu f f er ← bu f f er \ {Π
1
∪ Π
2
}
10: duo ← duo ∪ (Π
1
,Π
2
)
11: end while
12: for all (Π
1
,Π
2
) ∈ duo do
13: if F
tot
(Π
1
) ≤ F
tot
(Π
2
) then
14: M
it
← Π
1
, del
it
← Π
2
15: else
16: M
it
← Π
2
, del
it
← Π
1
17: end if
18: end for
19: del
it
← del
it
∩ M
it−1
20: end if
21: return M
it
, del
it
Algorithm 1: updateMemory().
3.4 Function mutations()
In the traditional approach, mutations occur on some
solutions of the current population by partially mod-
ify them (e.g two customers of two distinct routes are
swapped). In the DEVRPTW, this approach is dif-
ficult to implement while maintaining feasibility be-
cause of the to numerous constraints (notably that
of time windows and battery). To address this is-
sue, mutations are implemented not by partially mod-
ifying solutions, but by directly altering the memory
M
it
through the replacement of some solutions. Tak-
ing into account the framework of our population-
based ant system (see figure 2), prior to updating the
pheromone trails, a total of ⌊M
s
/4⌋ greedy random-
ized solutions are generated to substitute the poor-
est ants in M
it
. This is designed to excel in dy-
namic environments characterized by swift and sub-
stantial changes, thanks to the diversity introduced by
the random solutions. This is particularly effective
when dealing with dissimilar changing environments,
as increasing diversity at random proves superior to
knowledge transfer, a conclusion confirmed in the dy-
namic traveling salesman problem.
A greedy random solution is generated using a
similar process to the one used in function buildSolu-
tions(), except the pheromone value that are not con-
sidered to select the next customer. In details, if an
ant k is chosen for replacement in M
it
its correspond-
ing solution Π
k
=
/
0. Ant k must then construct a
new solution using a random greedy heuristic. To do
this, it starts from the depot and randomly selects the
next customer j ∈ UN
k
i
to visit while located at node i
with a 20% probability. Otherwise, it employs a ran-
dom proportionality rule solely based on the heuris-
tic η
i, j
(meaning pheromones are not used) to choose
the next customer j to visit from UN
k
i
. As reminder,
UN
k
i
corresponds to the unvisited customers for which
h
i
+t
i, j
≤ l
j
with h
i
the time at which ant k leave ver-
tex i. As reminder, just as function builSolutions(),
if ant k arrives at customer j before the start of its
time windows, it wait until e
j
to start the service of j.
Furthermore, if the chosen next customer leads to an
infeasible solution due to vehicle loading or battery
capacity constraints, either the depot or a recharge
station is selected depending on which constraint is
violated. This rules are the same as those detailed in
subsection 3.2.
3.5 Function updatePheromones()
The distinctive feature of our population-based ant
system used in this study, in contrast to conventional
ACO algorithms, relies on the integration of a mem-
ory used in conjunction with the pheromone matrix.
At the end of an iteration, each solution Π ∈ M
it
are
allowed to deposit pheromones according to equation
4, whit r that represent a route in solution Π and τ
max
the maximum value reachable for the pheromones.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
290

τ
i, j
= min(τ
max
, τ
i, j
+
1
F
tot
(Π)
) ∀r ∈ Π (4)
In addition, a negative pheromone update is ap-
plied to each solution Π in del
it
: the solution that was
in M
it−1
but that are not in M
it
, according to equation
5, whit r that represent a route in solution Π, τ
init
the
initial value of the pheromones, and dep
Π
the number
of times that solution Π has been allowed to deposit
pheromone.
τ
i, j
= max(τ
init
, τ
i, j
− dep
Π
·
1
F
tot
(Π)
) ∀r ∈ Π (5)
If it is the time for periodic re-optimization, a sec-
ond update of the pheromones occurs, in which all the
pheromones in the matrix τ are decreased by a fixed
amount, as described in equation 6.
τ
i, j
= max(τ
init
, τ
i, j
−
τ
max
− τ
init
|M
s
|
∀(i, j) ∈ τ (6)
4 EXPERIMENTATION
To asses the effectiveness of our algorithm, we need
to test it on dedicated instances. Fortunately, it ex-
ists instances in the state of the art that are com-
mon to both the Electric-VRPTW (EVRP) and the
Dynamic-VRPTW (DVRP): the Solomon benchmark
(Solomon, 1984) for the VRPTW. The Solomon’s in-
stance are categorized into three classes based on the
spatial arrangement of customer locations: random
customer distribution (R), clustered customer distri-
bution (C), and a combination of both (RC). Within
these groups, R1, C1, and RC1 have a relatively short
scheduling horizon, typically demanding more vehi-
cles to cater to all customers compared to R2, C2, and
RC2, which possess a longer scheduling horizon. Ad-
ditionally, instances within a group vary in terms of
time window density and time window width.
In (Schneider et al., 2014), the author details how
he has generated a set of 56 instances with 100 cus-
tomers for the EVRP, which are based on those of
Solomon. He adds a recharge station at the depot
and randomly places an additional 20 stations. How-
ever, he restricts the potential locations to ensure the
creation of viable and relevant instances, within each
customer can be reached from the depot using a max-
imum of two distinct recharging stations. The bat-
tery capacity is determined based on two factors: (1)
the charge needed to cover 60% of the average route
length of the best-known solution for the correspond-
ing VRPTW instance, and (2) twice the charge re-
quired to travel the longest distance between a cus-
tomer and a station. Moreover, the consumption rate
is set to 1.0 for simplicity. The recharging rate is
adjusted so that a full recharge takes three times the
average customer service time of the respective in-
stance. Finlay he has adjusted the customers time
windows to ensure that instances remain feasible.
To introduce a dynamic element to the Solomon
benchmarks, the authors in (Yang et al., 2017) pro-
pose the following method: a certain percentage of
nodes are only disclosed during the course of the
working day. A degree of dynamism of X% indicates
that each customer vertex i has a probability of X%
to receive a non-zero available time (rt
i
̸= 0), repre-
senting the moment when the request is known. This
available time is generated within the interval [0, ¯e
i
],
where ¯e
i
= min(e
i
,t
i−1
). t
i−1
represents the departure
time from the last vertex visited before i in the best
known solution.
To generate our instances, we use the method
proposed by Yang (Yang et al., 2017) to the bench-
marks given by Schneider (Schneider et al., 2014) for
which we consider its results as the best known so-
lutions. The results given in the section are divided
in two categories: when the degree of dynamism
X = 0 (the instances are static), and when X = 0.5
which mean that at most 50% of the customers re-
quests are known during the course of the working
day. For both categories, the instances were run 10
times on single thread with a Ryzen 5600U proces-
sor @2.30GHZ with 16GB of RAM on a computer
running Windows 11. The algorithm proposed has
been implemented using Python 3.11 and the follow-
ing empirically determined values of the parameters
are used: α = 2, β = 4, M
s
= 8, M
reset
= 0.1 and
τ
max
= τ
init
+ M
s
· F
tot
(Π
best
), with Π
best
that corre-
sponds to the best solution encountered during the
process of the algorithm (τ
max
is therefore dynamic).
The number of ants antQty = 15.
Table 1 gives the result of our population-based
ant system in a static context (all customers are known
at the start of the algorithm), and are compared to the
best results given by Schneider in (Schneider et al.,
2014). For our algorithm, each run has a duration of
7 minutes. For those of Schneider, only a meantime
in given which is around 16 minutes. Column Family
gives the category of the instances tested (e.g. C1,
C2, RC1 and so), column Schneider shows the best
results obtained by Schneider, while column EB-AS
gives the mean of our objective function over 10 runs
of each instances of the corresponding family. For
both, columns m and f give respectively the number
of vehicles and the total distance traveled.
The observations reveal that the outcomes closely
align with Schneider’s results. There exists a dis-
crepancy of 8.55% in the number of vehicles utilized,
and a margin of 2.38% favors Schneider in terms of
Evolutionary-Based Ant System Algorithm to Solve the Dynamic Electric Vehicle Routing Problem
291
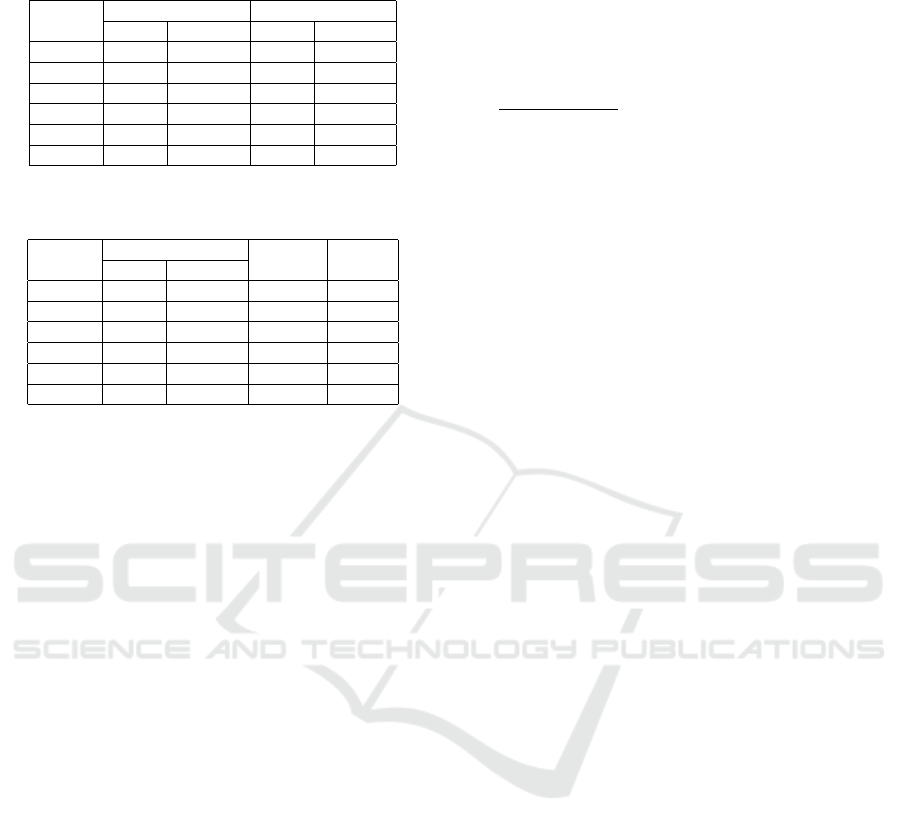
Table 1: Results of Schneider and EB-AS for DEVRPTW
instances in a static context.
Family
Schneider EB-AS
m f m f
C1 10.66 1048.11 10.91 1054.98
C2 4 640.79 4.42 669.51
R1 12.83 1259.29 12.92 1266.02
R2 2.63 800.41 3.05 817.26
RC1 13.12 1409.25 13.12 1488.46
RC2 3.125 1145.37 4,07 1167.14
Table 2: Comparison between dynamic and static results
obtained by EB-AS for DEVRPTW instances.
Family
EB-AS dynamic
∆ m ∆ f
m f
C1 11.42 1106.45 4.39% 4.57%
C2 4.75 699.06 4.30% 4.07%
R1 14.72 1347.12 12.26% 5.84%
R2 4.86 884.28 35.27% 7.50%
RC1 13.79 1518.06 4.79% 1.89%
RC2 4,31 1197.34 4.92% 2.58%
the overall distance covered. Notably, all customers
were successfully served, leading to the omission of
the objective function component pertaining to un-
served customers. However, it is important to note
that Schneider’s execution time is more than 1.5 times
longer than ours, which could account for this varia-
tion.
Table 2 gives the result of our population-based
ant system in a dynamic context, with a degree of
dynamism X = 0.5 (only half of the customers are
known at the start of the algorithm), and are com-
pared to our results in a static context. The periodic
re-optimization occurs every 5 minutes. This implies
that for a Schneider instance with a time horizon of
H = [0, 1000], assuming an 8-hour workday, periodic
re-optimization takes place approximately every 11
time units. As a result, if new clients arrive within
this 10-unit time window, the algorithm is restarted,
taking into account the new clients, vehicle positions,
battery status, and remaining charging capacities. The
initial optimization carried out before the start of the
workday is allowed a maximum run time of 5 min-
utes, while subsequent optimizations run for a max-
imum of 2 minutes to facilitate the transmission of
the routes updates to the vehicles. Column Family
gives the category of the instances tested (e.g. C1,
C2, RC1 and so), column EB-AS dynamic gives the
average of our objective function over 10 runs of each
instances of the corresponding family: columns m and
f give respectively the number of vehicles and the to-
tal distance traveled. Columns ∆ m and ∆ f express
the gap (in percent) between the results of EB-AS in a
dynamic and static context.
We observe average results very close to those in
a static context, with a gap of 10.99% and 4.41% in
terms of quantity of vehicles used and the total dis-
tance traveled, respectively. Moreover, for a specific
instance, if we measure the closeness of the solu-
tions respectively obtained in a static and dynamic
context using the the metric comp(Π
stat
,Π
dyn
) =
1
CE(Π
stat
,Π
dyn
)
|V
′
|+avg(|Π
1
|,|Π
2
|
(described in equation 3), with
Π
stat
and Π
dyn
respectively the solutions obtained in
a static and dynamic context. We found an average
of 83% similarities between static and dynamic solu-
tions.
This demonstrates that the algorithm is able to
do good decisions even while it doesn’t have prior
knowledge of all the customers to be served during
the workday. However, we do notice a larger devia-
tion in the R1 and R2 instance families, where cus-
tomer positions are random. This can be explained
by our heuristic which considers the duration and re-
maining time in the customer’s time window. Thus,
vehicles already on the road may stray far from the
depot, necessitating the dispatch of additional vehi-
cles during periodic re-optimization, as none of them
can meet the demand of new customers in a timely
manner.
5 CONCLUSIONS
In this article, we address the DEVRPTW. We
propose a mathematical formalization of the prob-
lem along with a solution method. This approach
combines elements of genetic and ACO algorithms.
Specifically, we use an Ant System algorithm with an
added memory component. This memory is updated
over iterations through a tournament system between
the best solutions from previous iterations and those
from the current iteration. To introduce variations in
the solutions, the memory undergoes mutations: cer-
tain solutions are replaced with new ones generated
using a random greedy heuristic.
Our algorithm is tested on Schneider instances in
both static and dynamic contexts, with run time of
7 minutes and 2 minutes respectively. Compared to
the best-known solutions in a static context, we ob-
serve a deviation of 8.55% and 2.38% in the number
of vehicles used and the total distance covered. These
results are promising considering the short execution
time. Furthermore, in a dynamic context, the solu-
tions obtained remain close to those generated in a
static context, with deviations of 10.99% and 4.41%
in terms of quantity of vehicles used and total distance
traveled. However, it is notable that on instances R1
and R2, the algorithm faces more challenges in pro-
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
292

viding relevant results. An improvement in the mem-
ory and pheromone transfer system during periodic
re-optimization can be considered, aiming to retain
only useful pheromones and relevant solutions. A lo-
cal search procedure can also be added to the general
flow of our algorithm in order to quickly improve a
part of the objective function: the distance traveled or
number of routes used. To go further, new constraints
and improvements will be considered: the possibil-
ity of partially recharging the battery, the use of a
piecewise linear function to recharge the batteries, the
availability of the recharge stations, etc. The results
must also be validated on larger instances, which may
include the improvements described above.
REFERENCES
Dantzig, G. B. and Ramser, J. H. (1959). The truck dis-
patching problem. Management Science, 6(1):80–91.
Dorigo, M., Maniezzo, V., and Colorni, A. (1996). Ant sys-
tem: optimization by a colony of cooperating agents.
IEEE Transactions on Systems, Man, and Cybernet-
ics, Part B (Cybernetics), 26(1):29–41.
Erdeli
´
c, T., Cari
´
c, T., et al. (2019). A survey on the elec-
tric vehicle routing problem: variants and solution ap-
proaches. Journal of Advanced Transportation, 2019.
Erdo
˘
gan, S. and Miller-Hooks, E. (2012). A green vehi-
cle routing problem. Transportation Research Part E:
Logistics and Transportation Review, 48(1):100–114.
Eyckelhof, C. J. and Snoek, M. (2002). Ant systems for
a dynamic tsp. In Dorigo, M., Di Caro, G., and Sam-
pels, M., editors, Ant Algorithms, pages 88–99, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Guntsch, M. and Middendorf, M. (2002). Applying pop-
ulation based aco to dynamic optimization problems.
In Dorigo, M., Di Caro, G., and Sampels, M., editors,
Ant Algorithms, pages 111–122, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Kumar, S. N. and Panneerselvam, R. (2012). A survey on
the vehicle routing problem and its variants. Intelli-
gent Information Management.
Leal, J. and Silva Junior, O. (2020). A multiple ant colony
system with random variable neighborhood descent
for the vehicle routing problem with time windows.
International Journal of Logistics Systems and Man-
agement, 1:1.
Mao, H., Shi, J., Zhou, Y., and Zhang, G. (2020). The elec-
tric vehicle routing problem with time windows and
multiple recharging options. IEEE Access, 8:114864–
114875.
Mavrovouniotis, M. and Yang, S. (2012). Ant colony
optimization with memory-based immigrants for the
dynamic vehicle routing problem. In 2012 IEEE
Congress on Evolutionary Computation, pages 1–8.
Mavrovouniotis, M. and Yang, S. (2013). Adapting the
pheromone evaporation rate in dynamic routing prob-
lems. In Esparcia-Alc
´
azar, A. I., editor, Applications
of Evolutionary Computation, pages 606–615, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Mavrovouniotis, M. and Yang, S. (2015). Ant algorithms
with immigrants schemes for the dynamic vehicle
routing problem. Information Sciences, 294:456–477.
Mori, N., Kita, H., and Nishikawa, Y. (1996). Adaptation
to a changing environment by means of the thermody-
namical genetic algorithm. In Voigt, H.-M., Ebeling,
W., Rechenberg, I., and Schwefel, H.-P., editors, Par-
allel Problem Solving from Nature — PPSN IV, pages
513–522, Berlin, Heidelberg. Springer Berlin Heidel-
berg.
Qin, H., Su, X., Ren, T., and Luo, Z. (2021). A review on the
electric vehicle routing problems: Variants and algo-
rithms. Frontiers of Engineering Management, 8:370–
389.
Schneider, M., Stenger, A., and Goeke, D. (2014). The
electric vehicle-routing problem with time windows
and recharging stations. Transportation science,
48(4):500–520.
Solomon, M. M. (1984). Vehicle routing and scheduling
with time window constraints: models and algorithms
(heuristics). PhD thesis, University of Pennsylvania.
Thymianis, M., Tzanetos, A., Osaba, E., Dounias, G., and
Del Ser, J. (2022). Electric vehicle routing prob-
lem: Literature review, instances and results with a
novel ant colony optimization method. In 2022 IEEE
Congress on Evolutionary Computation (CEC), pages
1–8. IEEE.
Wang, N., Sun, Y., and Wang, H. (2021). An adaptive
memetic algorithm for dynamic electric vehicle rout-
ing problem with time-varying demands. Mathemati-
cal Problems in Engineering, 2021:1–10.
Wu, H. and Gao, Y. (2023). An ant colony optimization
based on local search for the vehicle routing problem
with simultaneous pickup–delivery and time window.
Applied Soft Computing, 139:110203.
Yang, S. (2008). Genetic Algorithms with Memory- and
Elitism-Based Immigrants in Dynamic Environments.
Evolutionary Computation, 16(3):385–416.
Yang, Z., van Osta, J.-P., van Veen, B., van Krevelen, R.,
van Klaveren, R., Stam, A., Kok, J., B
¨
ack, T., and
Emmerich, M. (2017). Dynamic vehicle routing with
time windows in theory and practice. Natural comput-
ing, 16:119–134.
Evolutionary-Based Ant System Algorithm to Solve the Dynamic Electric Vehicle Routing Problem
293
