
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth
Table: A Case Study of Multi-Class Fault Diagnosis
Abdelouadoud Kerarmi
1 a
, Assia Kamal-Idrissi
1 b
and Amal El Fallah Seghrouchni
1,2 c
1
Ai Movement - International Artificial Intelligence Center of Morocco - Mohammed VI Polytechnic University, Rabat,
Morocco
2
Lip6, Sorbonne University, Paris, France
Keywords:
Fuzzy Logic, Decision Tree, C4.5 Algorithm, Truth Table, Rule Induction, Knowledge Representation,
Multi-Classification, Combinatorial Complexity, Fault Diagnosis.
Abstract:
Fuzzy Logic (FL) offers valuable advantages in multi-classification tasks, offering the capability to deal with
imprecise and uncertain data for nuanced decision-making. However, generating precise fuzzy sets requires
substantial effort and expertise. Also, the higher the number of rules in the FL system, the longer the model’s
computational time is due to the combinatorial complexity. Thus, good data description, knowledge extrac-
tion/representation, and rule induction are crucial for developing an FL model. This paper addresses these
challenges by proposing an Integrated Truth Table in Decision Tree-based FL model (ITTDTFL) that gener-
ates optimized fuzzy sets and rules. C4.5 DT is employed to extract optimized membership functions and rules
using Truth Table (TT) by eliminating the redundancy of the rules. The final version of the rules is extracted
from the TT and used in the FL model. We compare ITTDTFL with state-of-the-art models, including FU-
RIA, RIPPER, and Decision-Tree-based FL. Experiments were conducted on real datasets of machine failure,
evaluating the performances based on several factors, including the number of generated rules, accuracy, and
computational time. The results demonstrate that the ITTDTFL model achieved the best performance, with an
accuracy of 98.92%, less computational time outperforming the other models.
1 INTRODUCTION
Classification is a key element of machine learning.
It aims to assign labels to new data based on prior
knowledge. Various approaches for data classifica-
tion can be found in the literature. Rule induction
can be found among these approaches, it aims to as-
sign labels to data using predefined rules that can
be obtained from various methods, including Deci-
sion Tree algorithms (DT) and association rule min-
ing. Such rule sets may be used in Rule-Based Sys-
tems (RBS) (Durkin, 1990), which can be adopted
for classification tasks to support decision-makers.
In a broader context, RBS uses predefined rules of-
ten shaped by expert knowledge through classical IF-
THEN rules (Varshney and Torra, 2023). However,
it fails to cover the imprecision and uncertainty pre-
sented in the expert’s knowledge. Therefore, Fuzzy
Rule-Based Systems (FRBS) emerged to deal with
a
https://orcid.org/0000-0003-3056-3229
b
https://orcid.org/0000-0001-6396-9685
c
https://orcid.org/0000-0002-8390-8780
this imprecision and uncertainty by exemplifying a
distinct subset of these rules based on the theory of
fuzzy sets (Zadeh, 1965). FRBS were born by com-
bining FL with RBS, they are a practical application
of FL and also known as a fuzzy inference system.
FL is an Artificial Intelligence (AI) branch that em-
braces decision-making and logical reasoning. This
technique has become a powerful tool for modeling
complex dynamic systems by dealing with the vague-
ness and uncertainty in information in various do-
mains imitating human reasoning, including multi-
classification problems. However, FL has some lim-
itations that must be addressed concerning the iden-
tification of the fuzzy sets of quantitative attributes,
their membership functions and fuzzy rules, which
are mostly manually generated (Elbaz et al., 2019).
These fundamental FL steps require expert knowl-
edge that can be subjective (Tran et al., 2022). In ad-
dition, a huge database can ultimately lead to combi-
natorial complexity and rule base expansion, making
FL system design difficult to maintain and sustain in
real-time (Hentout et al., 2023). Noting that the com-
312
Kerarmi, A., Kamal-Idrissi, A. and Seghrouchni, A.
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis.
DOI: 10.5220/0012378900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 312-323
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

binatorial complexity of fuzzy rules can be exponen-
tial in the worst case, it corresponds to the cartesian
product of all possible combinations of fuzzy sets. Let
us assume a fuzzy rule with two input variables x and
y and one output z. The rule then is written as: if
x ∈ I
x
and y ∈ I
y
then z ∈ I
z
, where |I
x
| = n, |I
y
| = m
and |I
z
| = k, that are represented as linguistic terms
where x, y are the antecedents, then there are n×m×k
possible combinations. Thus, this combinatorial com-
plexity and the rule size should be handled, requiring
an accurate rule induction method.
Indeed, FL placed in the sight of rule induction
interests (H
¨
ullermeier, 2011). New approaches have
been found in the literature. The most adopted one
combines FL with DTs, a method used for rule in-
duction to extract knowledge from the dataset based
on information theory and thus generate fuzzy rules.
DT has demonstrated its efficacy in many areas, such
as regression, classification, and feature subset selec-
tion tasks. DT and FL are very interpretable, their
primary keys lies in their high interpretability when
compared to other approaches. This interpretability is
often prioritized over alternative methods that might
achieve greater accuracy but are notably less inter-
pretable (Bertsimas and Dunn, 2017). Additionally,
they possess swift induction processes and demand
low computational resources (Cintra et al., 2013).
To the extent of the authors’ knowledge, only
some studies use the DT model to generate rules for
the FL model, it can classify data and provide valu-
able information into classes based on features. Nev-
ertheless, the number of generated rules from a com-
plicated dataset, the classification accuracy and com-
putational time in this context fell short of the de-
sired performance levels. To overcome these limi-
tations, This paper proposes a new Integrated Truth
Table in Decision Tree-based FL model (ITTDTFL)
that generates optimized fuzzy sets and rules. C4.5
DT is employed for optimized membership functions
and rules extraction using TT by eliminating the re-
dundancy of the rules. The TT technique is presented
previously (Kerarmi et al., 2022). The latter smartly
and automatically generates a relatively small number
of understandable fuzzy rules and membership func-
tions, leading to better results in terms of time com-
plexity interpretability. The data used corresponds to
real industrial datasets collected from pumps. We ex-
ploit this information generated from the DT to build
an FL model that can merge the advantages of the
DT and TT techniques to create a robust and efficient
model for classification issues. Integrating TTs to re-
duce the number of fuzzy rules and optimize member-
ship functions while improving accuracy adds signif-
icant value to the ITTDTFL model.
The remainder of this paper is organized as fol-
lows. In Section 2, we review the relevant literature.
Section 3 describes the methodology. Section 4 dis-
cusses the experiment’s results. Finally, in Section 5,
we conclude the paper and outline directions for fu-
ture research.
2 RELATED WORK
Since FL appears to be a robust model for classifi-
cation issues in the literature, many researchers have
tried to improve it. The most widely used rule-
based generation approach is data clustering, which
aims to group data into clusters based on a similar-
ity measure. From these clusters, fuzzy sets can be
obtained. In (Chiu, 1997), a subtractive clustering
method with fuzzy rules extracted from the presented
data groups the data point with many neighboring
data points as a cluster center, and the neighboring
data points are linked to this cluster. Another cluster-
ing method in (G
´
omez-Skarmeta et al., 1999) called
fuzzy clustering is used to generate fuzzy rules, where
data elements can be assigned to multiple clusters,
and each data point is assigned to membership lev-
els, denoting the extent of its association with one
or more clusters. Also, in (Reddy et al., 2020) an
adaptive genetic algorithm is used to optimize gen-
erated rules from a fuzzy classifier to predict heart
disease. Numerous studies have proposed the use
of optimization algorithms for fuzzy rule generation.
One study, for example, suggests using a genetic al-
gorithm (Angelov and Buswell, 2003), which simul-
taneously estimates the structure of the rule base and
the parameters of the fuzzy model from the available
data. A hybrid intelligent optimization algorithm is
proposed in (Mousavi et al., 2019) to generate and
classify fuzzy rules and select the best rules in an
if–then FRBS. A method based on subtractive clus-
tering using a genetic algorithm for optimized fuzzy
classification rules generation from data is presented
in (Al-Shammaa and Abbod, 2014). Other induc-
tive learning algorithms based on FL models, such
as fuzzy grid-based CHI algorithm (Chi et al., 1996)
and the genetic fuzzy rule learner SLAVE (Gonzblez
and P
´
erez, 1999) were also proposed. In addition,
particle swarm optimization is employed to generate
the antecedents and consequences of the other mod-
els like fuzzy rule base (Prado et al., 2010). An-
other method that uses DT to generate fuzzy rules
and employs a genetic algorithm to optimize these
rules was developed in (Kontogiannis et al., 2021),
the model achieved an accuracy of 89.2%, generating
281 rules. A similar method proposed in (Ren et al.,
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis
313

2022) converts the path generated from traversing a
DT based on the ID3 algorithm into a set of fuzzy
rules. Authors in (Tran et al., 2022) also proposed
a Node-list Pre-order Size Fuzzy Frequent (NPSFF)
algorithm for fuzzy rule mining, which has proven ef-
ficient in other important metrics, notably computa-
tional time and memory consumption. Besides clus-
tering and data optimization algorithms, several meth-
ods have been proposed for rule generation (Mutlu
et al., 2018). However, two algorithms are taking
over the literature in rule induction for Classification
issues, RIPPER (Cohen, 1995) and FURIA (H
¨
uhn
and H
¨
ullermeier, 2009), they are still references for
comparison with other algorithms, notably C4.5 and
other genetic algorithms. A full comparison between
FURIA, RIPPER, C4.5, fuzzy grid-based CHI algo-
rithm, and the genetic fuzzy rule learner SLAVE mod-
els is presented in (H
¨
uhn and H
¨
ullermeier, 2010).
These models were run on 45 real-world classifica-
tion datasets from the UCI, Statlib repositories, agri-
cultural domain, and others. RIPPER and C4.5 gave
good results in classification accuracies, but FURIA
was the best. In previous work (Kerarmi et al., 2022),
the authors proposed to use TT in FL. The Integrated
TT in FL (ITTFL) model aims to represent the logic
between machine states and generate optimized rules
of FL. A series of tests were conducted to justify
the choice of the type of membership function used.
The results showed that the Trapezoidal membership
function gave more accurate results than the Triangu-
lar and Gaussian membership functions. Trapezoidal
membership functions cover a greater degree of each
variable belonging to a given set. However, this ap-
proach does not deal with identifying fuzzy sets and
their membership functions which are also required to
be accurate to have a robust FL model, it requires an
absolute classification model of the data. These ap-
proaches face computational time and interpretability
drawbacks, crucial metrics now considered manda-
tory. Although methods with higher accuracy exist,
interpretability is often preferred. For this reason,
DT and FL which are considered very interpretable,
are chosen to fill this gap. In brief, FL has known
several improvements by integrating different tech-
niques such as DTs, Genetic Algorithms, and Neu-
ral Networks. However, these approaches introduce
drawbacks such as increased complexity and compu-
tational time. Particularly for DT, its greedy behavior
where each branch is independently determined, can
fail to capture dataset features accurately and lead to
duplicated sub-trees and poor performance in classi-
fying future data points.
3 METHODOLOGY
The ITTDTFL model is an extension of the previ-
ously proposed model by the authors (Kerarmi et al.,
2022) to optimize the fuzzy rules generation based on
the TT technique (ITTFL). The ITTDTFL uses a DT
to extract knowledge and then optimizes the gener-
ated fuzzy rules and membership functions using TT.
This section introduces the FL and the DT models and
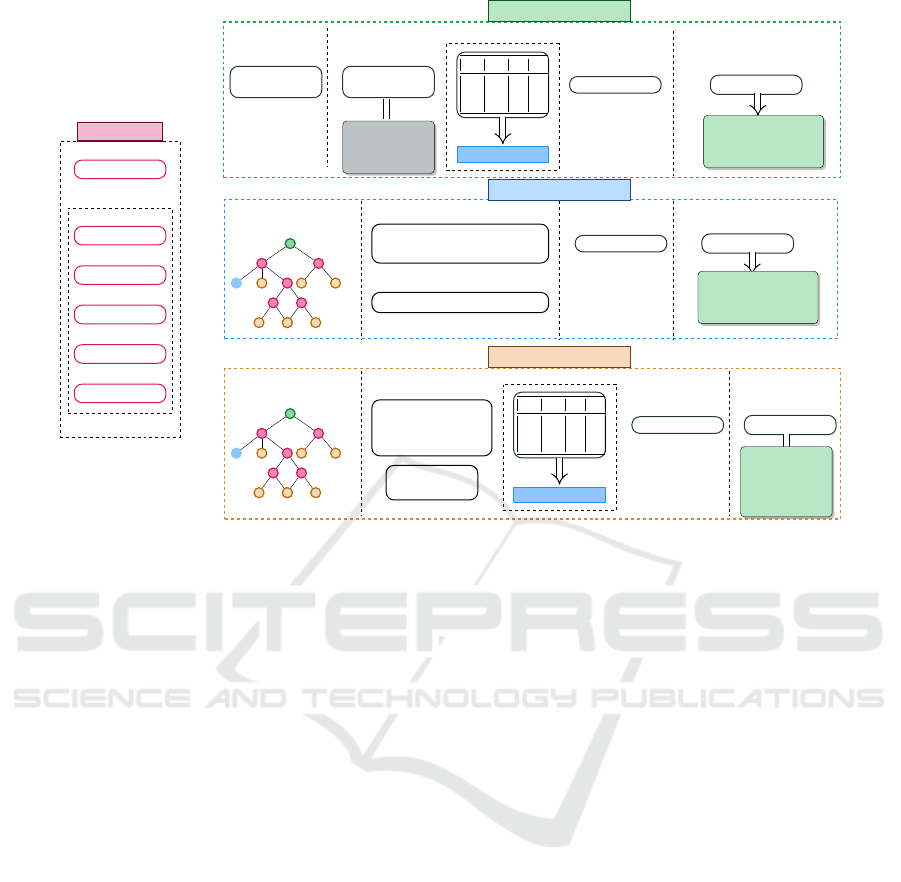
then describes the proposed ITTDTFL model. Fig-
ure 1 depicts the architecture of the ITTFL, DTFL and
ITTDTFL models.
3.1 Background
3.1.1 Fuzzy Logic Model
FL model is based on fuzzy sets where the linguistic
notions and membership functions define the truth-
value of such linguistic expressions (Zadeh, 1965). A
fuzzy set A in a universe of discourse X is charac-
terized by a membership function µ
A
(x) that assigns a
value in the interval [0, 1] to each element x in X. This
membership function represents the degree to which
x belongs to the set A. The FL System consists of
four steps (Hentout et al., 2023): Fuzzification, Fuzzy
knowledge base, Inference engine, and Defuzzifica-
tion.
1. Fuzzification: Consisting of converting numeri-
cal inputs into linguistic variables represented by
membership degrees in fuzzy sets.
2. Fuzzy Knowledge Base: Representing the rela-
tionship between the input variables x and the out-
put variables y. A fuzzy rule has the following
form: ”IF antecedent THEN consequent,” where
both the antecedent and consequent involve lin-
guistic variables and fuzzy sets.
3. Inference Engine: Performing logical deductions
and drawing conclusions based on the rules and
knowledge contained in the system’s knowledge
base.
4. Defuzzification: Aggregating fuzzy output,
which represents the system’s conclusion or de-
cision, is converted into a crisp that can be easily
understood.
3.1.2 C4.5 Algorithm
C4.5 Algorithm is a DT algorithm developed by Ross
Quinlan (Quinlan, 2014). It is an extension of the ID3
(Iterative Dichotomiser 3). The C4.5 algorithm con-
structs a DT from a given dataset by partitioning data
recursively based on feature attributes. It can handle
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
314
Data
Labeled data
Attribute : A
1
Attribute : A
2
...
Attribute : A
n
Class : C
INPUT DATA
Data Pre-
processing
Layer 1
Input Mem-
bership
• Triangular
• Trapezoidal
• Gaussian
Layer 2
A
1
A
2
... C
T T ... 1
T F ... 1
F T ... 0
Layer 3
Optimized Rules
Defuzzifier
Layer 4
Crisp Output
• Degree of mem-
bership to each
class
Layer 5
(a) ITTFL
Layer 1
Membership (Trape-
zoidal) Generation
Fuzzy Rules Generation
Layer 2
Defuzzifier
Layer 3
Crisp Output
Layer 4
• Degree of mem-
bership to each
class
(b) DTFL
Layer 1
Membership
Generation
(Trapezoidal)
Fuzzy Rules
Generation
Layer 2
A
1
A
2
... C
T T ... 1
T F ... 1
F T ... 0
Layer 3
Optimized Rules
Defuzzifier
Layer 4
Crisp Output
Layer 5
• Degree of
member-
ship to
each class
(c) ITTDTFL
Figure 1: The framework of the three models.
numerical and categorical features and is mainly used
for classification tasks. The C4.5 algorithm based on
entropy and the information gain allows the genera-
tion of a DT. The equation (1) presents the entropy to
measure the purity and homogeneity within the data
while equation (2) corresponds to information gain to
determine the best attribute to use for data splitting at
each node (Hssina et al., 2014).
Entropy(S) = −
n
∑
i=1
p
i
× log (p
i
) (1)
Gain(S, T) = Entropy(S) −
n
∑
j=1
(p
j
× Entropy(p
j
))
(2)
Where:
• Entropy(S): The entropy of the dataset S.
• p
i
: The proportion of instances in S that belong to
class i.
• Gain(S,T ): The gain achieved by splitting the
dataset S using attribute T.
• p
j
: The set of all possible values for attribute T.
Here is a brief overview of the C4.5 algorithm
steps:
1. The algorithm selects the best attribute for split-
ting the data starting with the root node. The
splitting criterion in C4.5 is based on the entropy
and the information gain ratio, which considers
the number of choices in a given attribute.
2. The algorithm divides the data according to the
selected attribute and then creates child nodes for
each possible attribute value.
3. The algorithm recursively repeats steps 1 and 2 for
each child node until a stopping condition is satis-
fied. This condition may be reaching a maximum
depth, having a minimum number of samples at a
node, or meeting other predefined criteria.
4. The algorithm assigns a class label to each leaf
node based on the dominant class of the training
samples at that node.
5. The algorithm prunes the tree to reduce overfitting
by deleting nodes or merging branches.
3.2 Description of the Proposed Model:
ITTDTFL
The ITTDTFL model is an FL-based one that exploits
the knowledge extracted from the C4.5 DT without a
pruning process to provide all the possible and accu-
rate rules and membership functions for the inference
engine. The model’s strength relies on using the TT
technique to optimize the fuzzy rules and membership
functions by merging inclusions of attributes’ inter-
vals that build these rules and membership functions.
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis
315
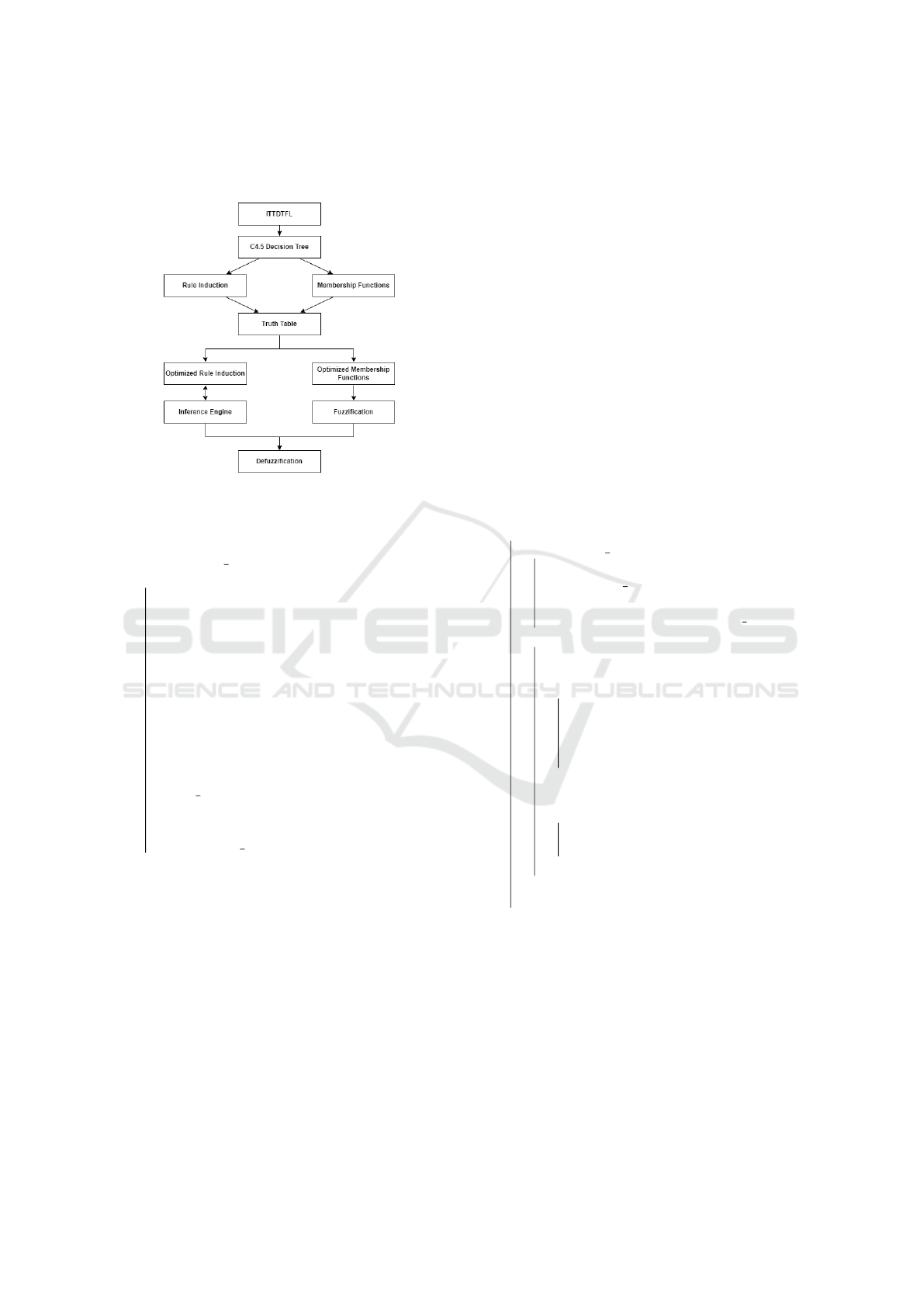
Figure 2 represents the steps of the ITTDTFL model,
whereas the pseudo-code is described in Algorithm 1.
Figure 2: ITTDTFL model flow chart.
Data: dataset D
Result: degree of membership to each class:
Class degree
begin
D ← Read Data;
Tree ← decisionTreeC4.5(D, Features,
Target);
TreeRules ← ruleExtraction(Tree, rules,
currentRule);
Intervals ←
intervalRuleExtraction(TreeRules, Lists);
OIntervals, FuzzyRules ←
truthTable(Intervals, Lists);
MembershipFunctions ← (TrapezoidalMF,
OIntervals);
Class degree ←
fuzzuLogicModel(MembershipFunctions,
FuzzyRules);
return Class degree
end
Algorithm 1: ITTDTFL model.
The algorithm starts by generating a DT
without pruning process from the dataset
using decisionTreeC4.5 function. Next,
ruleExtraction function uses Depth-first search
(DFS) to traverse the generated tree from the root
node to the deepest leaves, identifying rules along
each path (see the description in Algorithm 2). For
instance, the output of this step on classifying two
attributes (A
1
and A
2
), based on one target (C
z
), is a
set of rules described in Table 1.
The intervals are then extracted using
intervalRuleExtraction function, where each
line is transformed into a rule containing intervals
of attributes and the corresponding class. Respect-
ing greater than and smaller than symbols (see
Algorithm 3). For example, considering in line 1:
’if (A
1
<= 0.05) and (A
2
> 0.015) then class: C
z
(proba: 100.0%) — based on x samples’, the condi-
tion: (A
1
<= 0.05) can be written as A
1
= [X, 0.05],
while the condition: (A
2
> 0.015) can be written as
A
2
= [0.015, Y], where X, Y represents the Min and
Max values that attribute A
1
, A
2
can take based on
the dataset. Considering a second line, the condition
is as follows: (A
1
> 0.05) and (A
2
<= 0.002) and
(A
2
> 0) and (A
2
> 0.001)..., besides A
1
, attribute A
2
also can be transformed to an interval; A
2
= [0.001,
0.002], and so on.
Data: Tree
Result: TreeRules
Function TraverseDecisionTree(node, rules,
currentRule) ;
begin
if node.class label is not Null then
currentRule.append(”class: ” +
node.class label) ;
rules.append(”if ” + currentRule.join(”
and ”) + ” then ” + node.class label) ;
else
if node.attribute is not Null and
node.operator is not Null and
node.threshold is not Null then
currentRule.append(”(” +
node.attribute + ” ” +
node.operator + ” ” +
node.threshold + ”)”) ;
end
for value, childNode in
node.children.items() do
TraverseDecisionTree(childNode,
rules, copy(currentRule)) ;
end
end
return rules
end
Algorithm 2: ruleExtraction.
This step allows the conversion of every line to
a new rule line containing intervals for each attribute
and its corresponding class, written as: AttributeX
p
&
AttributeY
q
then Class : C
Z
. Next, from these lines,
truthTable function, described in Algorithm 4, is
used to create a TT for interval processing. DTs can
generate a large number of rules and intervals, and
this number is likely to grow as the size and complex-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
316
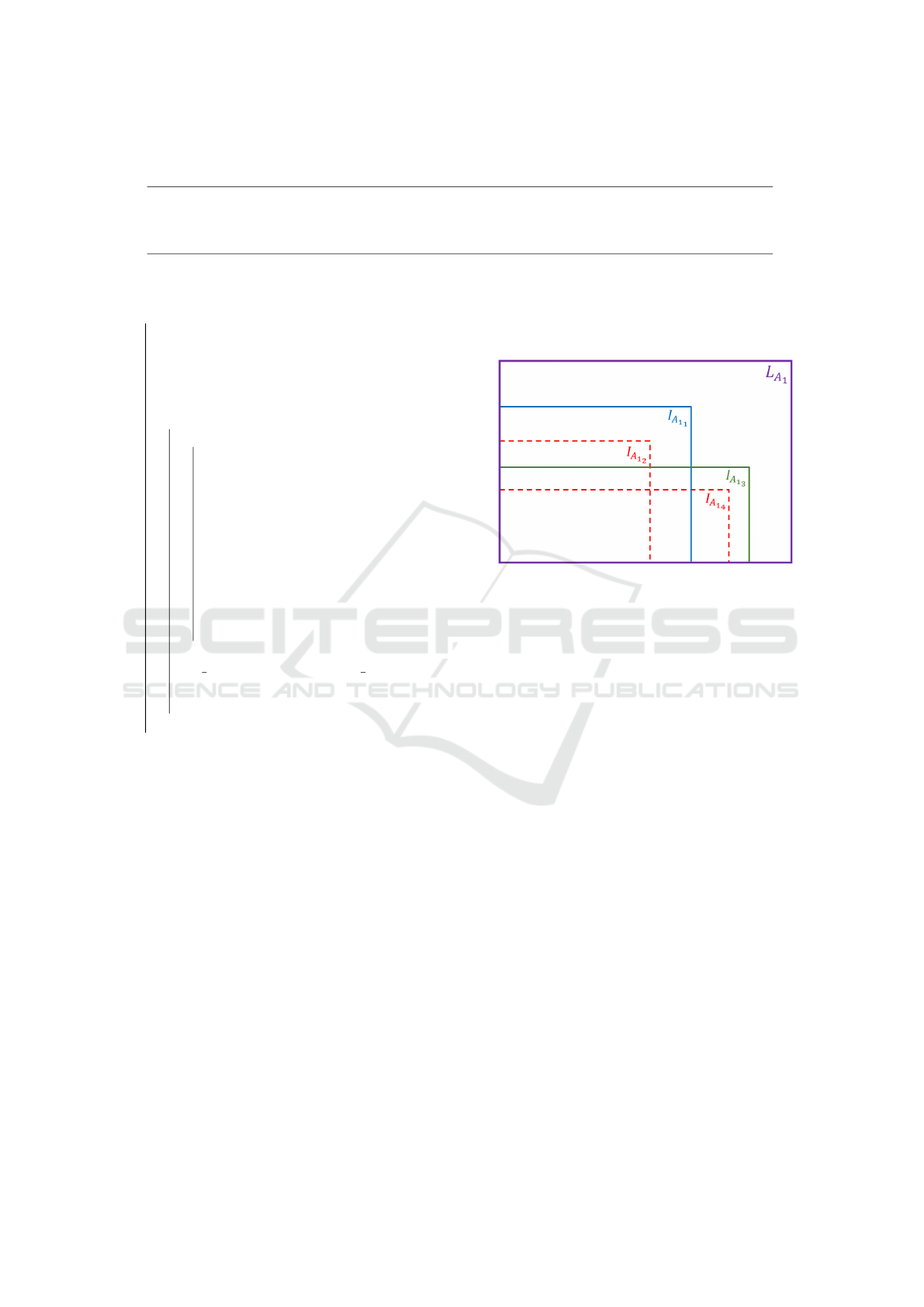
Table 1: Example of the output of ruleExtraction function. A represents the attributes, t is the threshold determined from
the tree for each split t ∈ R
+
.
if (A
1
<= t) and (A
2
<= t) then class: C
z
(proba: 100.0%) — based on x samples
if (A
1
> t) and (A
2
<= t) and (A
2
> t) and (A
2
> t) then class: C
z
(proba: 100.0%) — based on x samples
if (A
1
> t) and (A
2
> t) and.... and (A
2
> t) then class: C
z
(proba: 100.0%) — based on x samples
...
Data: TreeRules
Result: Intervals
begin
Initialize intervals dictionary {A
1
: [ ], A
2
:
[ ]};
Define patterns: Interval patterns (”A
1
≤
value”, ”A
2
> value”), Class pattern
(”Class : value”);
foreach line in TreeRules do
foreach match in line using patterns do
Extract attribute (A
1
or A
2
) and
value;
Convert value to a floating-point
number;
Update intervals[A
1
] or
intervals[A
2
] with the extracted
value;
Extract the Class and the value;
Convert the value to string;
Update Class with the extracted
value;
end
A
1
index = [start, end] & A
2
index =
[start, end] Class : C
Z
;
save to Intervals;
end
end
Algorithm 3: intervalRuleExtraction.
ity of the data increases. Therefore, these intervals
must pass through the proposed process in order to
be reduced to avoid useless computations. The TT
approach identifies and merges the inclusions within
the extracted intervals. The TT contains attributes,
for example, two attributes A
1
, A
2
, and the classes as
columns, while in rows, there are intervals I
A
1
and I
A
2
for each state, 1 if the class is true 0 if it is false, as
shown in Table 7. First, a grouping process of the
attributes by class (where Class = 1), then for each
group, it compares the extracted intervals for each at-
tribute. Technically, it creates a list for each row of
attributes in the group L
A
1
& L
A
2
of intervals. Next, a
comparison between intervals of each list is made. A
merging process of the inclusions is executed. Taking
for example L
A
1
contains 4 sets or intervals I
A
1
1
, I
A
1
2
,
I
A
1
3
and I
A
1
3
as Figure 3 shows, it is obvious that inter-
val I
A
1
1
includes I
A
1
2
and I
A
1
3
includes I
A
1
4
, thus, only
I
A
1
1
and I
A
1
3
will be kept and respectively replace in-
tervals I
A
1
2
and I
A
1
4
. The use of such an approach has
notably reduced the number of intervals as well as the
extracted rules.
Figure 3: L
A
1
Intervals inclusion property.
After having the TT’s final version, all the inter-
vals left are transformed into Trapezoidal Member-
ship Functions using membershipF function. The
trapezoidal membership function is a graph represent-
ing the degree to which an element belongs to a cer-
tain fuzzy set. It has four parameters: the left and
right edges, a lower plateau, and an upper plateau.
These parameters determine the shape of the trape-
zoid, which represents the fuzzy sets. For example, a
fuzzy set of ”tall people.” the trapezoidal membership
function for this set could have the following param-
eters:
• Left boundary point: 150 cm
• Right boundary point: 200 cm
• Lower plateau: 160 cm
• Upper plateau: 190 cm
We chose this type of membership function based
on previous work comparing the Trapezoidal mem-
bership function with Triangular and Gaussian mem-
bership function (Kerarmi et al., 2022). Based on the
results, adopting the Trapezoidal membership func-
tion for an FL model gave better results simply be-
cause it rates the degree of belonging at 100% that
an element belongs to a fuzzy anywhere between the
lower and upper plateau. For example, if we use ’Tall’
as a linguistic term to describe values that fall within
the upper and lower plateaus, it means all people be-
tween 160 and 19 cm are Tall. Unlike the Triangu-
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis
317

Data: Intervals
Result: OIntervals
Initialize an empty truth table, a 2D array with
rows for each data point and columns for each
class;
while Reading lines do
foreach each line in the lines do
Initialize an empty row in the truth
table with all zeros;
Extract the values of attribute 1 and
attribute 2 from the current line;
foreach each class do
if attribute 1 is in the class’s
interval AND attribute 2 is in the
class’s interval then
Set the corresponding cell in
the truth table to 1;
end
end
end
Group table by Class = 1;
Initialize an empty list S for storing
optimized intervals;
S ← Group;
L
1
← length(I
1
);
L
2
← length(I
2
);
foreach two intervals I
1
and I
2
in S do
if I
1
[1] ≤ I
2
[1] AND I
1
[L
1
] ≥ I
2
[L
2
] then
S ← S \ {I
2
}
end
end
end
Algorithm 4: truthTable.
lar and Gaussian membership functions, an element
100% belongs to a fuzzy set only if it is equal to the
median of the fuzzy set. Since the vagueness is also
represented in the uncertain belonging degree of an
element to a particular fuzzy set, logically, the Trape-
zoidal membership function is the best.
Rules are extracted from the table, where each
row represents a rule. Noting that during the extrac-
tion of the rules, we considered extracting these rules
in a required format to go straight to the rule base:
rule
n
= ctrl.Rule(Attribute
p
[’MembershipFunction
x
’]
&Attribute
p+1
[’MembershipFunction
y
’],Class[’C
Z
’]).
Finally, all the requirements of an FL model are
satisfied, and Fuzzy sets and fuzzy rules are automat-
ically generated and well-optimized. The function
fuzzuLogicMode is used to build an FL model, the
final step in our model.
The model identifies the logic between data, ex-
tracts, describes, and represents the knowledge from
this data. This part is described in the Experiments
Section. For the sake of simplicity, the models return
the set of failure classes with their probabilities. This
probability can be seen as a measure of the likelihood
of an occurrence of a failure in real-time. Table 2 rep-
resents an extract of rules from the DT.
Table 2: Short example of extracted rules from the DT.
rule1 = ctrl.Rule(A
1
value[’A
1
0
’], Class[’C
z
’])
rule2 = ctrl.Rule(A
1
value[’A
1
1
’] & A
2
value[’A
2
0
’], Class[’C
z
’])
rule3 = ctrl.Rule(A
1
value[’A
1
2
’] & A
2
value[’A
2
1
’], Class[’C
z
’])
...
4 EXPERIMENTS & RESULTS
In order to evaluate our model performance, we
benchmark the algorithms DTFL and ITTDTFL with
C4.5, FURIA, and Ripper from WEKA library (Wit-
ten et al., 2005) implemented using Python 3.8 in
the same environment. The evaluation is done by
conducting a series of experiments based on several
factors (Hambali et al., 2019), including the number
of generated rules, computational time, accuracy in
Equation 3, and other metrics such as F1-score which
indicates the model’s capabilities of avoiding false
positives (recall) while identifying positive examples
(precision) in Equation 6, Sensitivity/recall which
evaluates the model’s predictions of true positives of
each available category in Equation 7, and Receiver
Operating Characteristic Curve (ROC) area which in-
dicates the model performance at distinguishing be-
tween the classes. The performance of the five models
is extensively demonstrated using three sets of data
related to pump failure instances. The description of
the data, the experiment protocol, and the obtained
results are demonstrated later in this section.
Accuracy =
TP + TN
TP + FP + TN + FN
(3)
Precision =
TP
TP + FP
(4)
Recall =
TP
TP + FN
(5)
F-Measure =
2(Precision-Recall)
(Precision + Recall)
(6)
where TP is the True Positive, TN is the True Neg-
ative, FP is the False Positive ad FN is the False Neg-
ative.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
318
4.1 Datasets
Two real datasets were collected from two pumps.
The data captures various operational parameters,
such as the acceleration time waveform (g), velocity
spectrum ( f f tv), and acceleration spectrum ( f f tg),
saved as lists of observations, as well as the failure
class based on the results of a regularly performed
Failure Mode and Effect Critical Analysis method
(FMECA) (Kerarmi et al., 2022). It contains seven
classes where one is a normal state, and six others cor-
respond to different failures. All the datasets include
measurements from several sensors installed through-
out the machine. Table 3 represents a statistical data
view, while Table 4 describes their form. The third
dataset is the combination of the two datasets. These
rich and comprehensive datasets provide a detailed
view of system behavior and form the basis for perfor-
mance analysis and classification of potential failures.
Additionally, these datasets have been pre-processed
to eliminate outliers and missing values before further
analysis.
Table 3: Datasets statistical description.
Dataset Number of rows
1 4016
2 3048
3 7064
Table 4: Datasets description.
P
1
g
2
fftv
3
fftg
4
MSC
5
P1- P2- P3- P4
Numerical data
Numerical data
Numerical data
Normal State
Imbalance
Structural fault
Misalignment
Mechanical looseness
Bearing lubrication
Gear fault
1
Sensor position;
2
Acceleration time waveform;
3
Velocity spectrum;
4
Acceleration spectrum;
5
Machine State Class.
First, We calculate the Root Mean Square (RMS)
values of ( f f tv) and ( f f tg) since they are critical fac-
tors for machinery status diagnosis for signal normal-
ization and to reduce variability. Equation (7) depicts
the formula based on this study (Rzeszucinski et al.,
2012). We calculate the RMS of all the lists in f f tv
and f f tg of each machine state class identified by the
FMECA method using the following formula:
x
rms
=
r
1
n
x
2
1
+ x
2
2
+ ··· + x
2
n
(7)
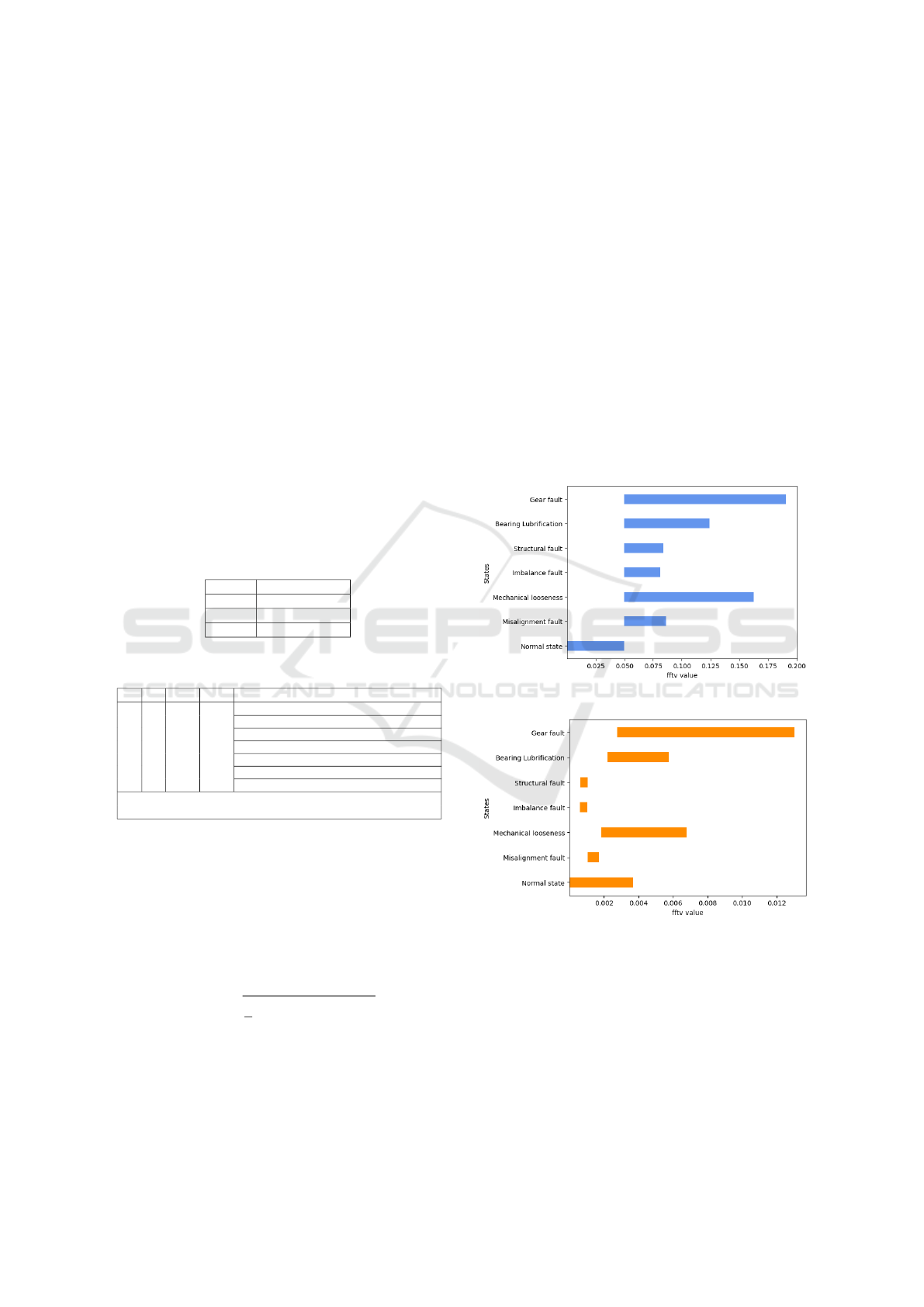
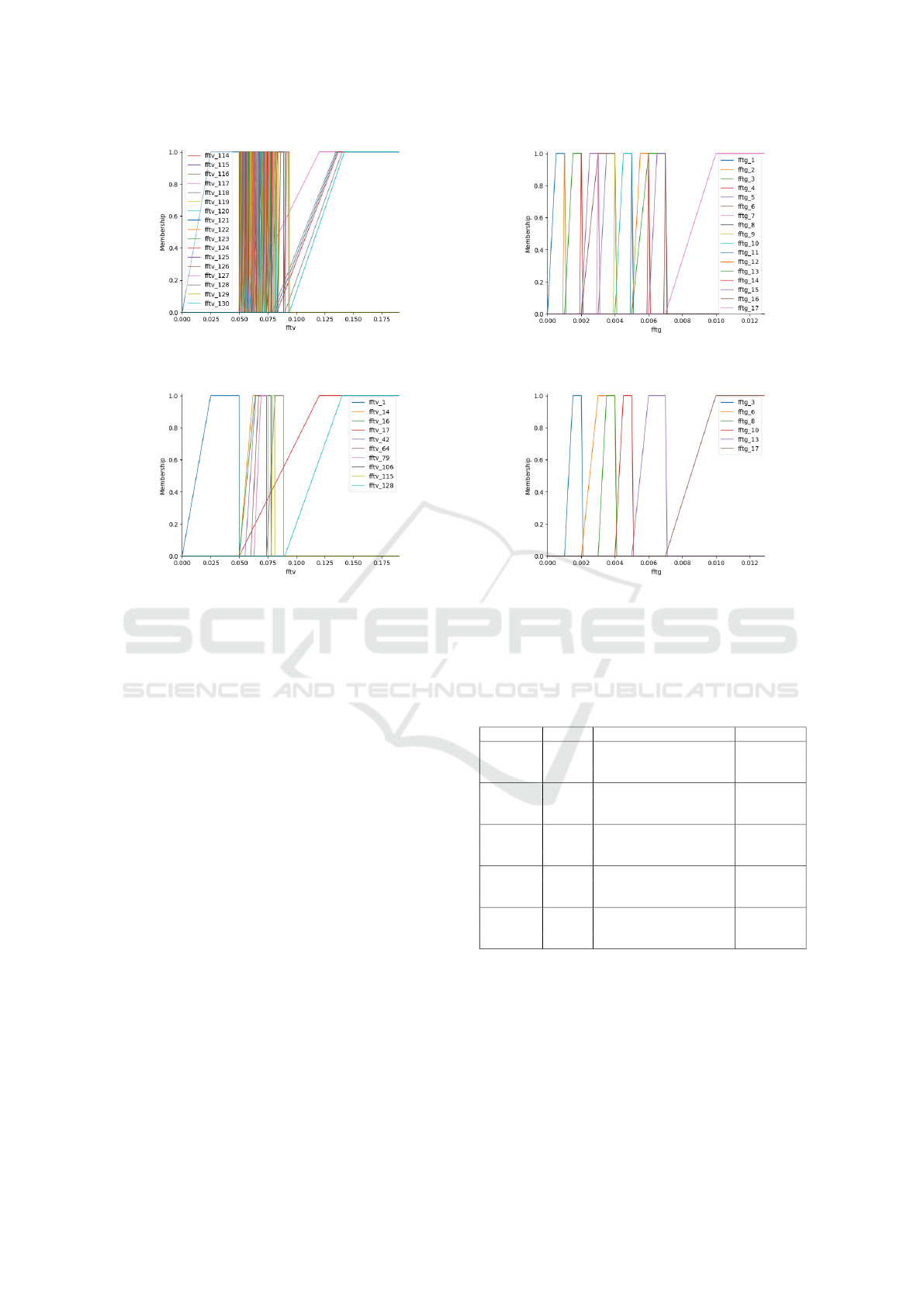
We finally got rows that include the root mean
square (RMS) values of f f tv and f f tg for the seven
described machine state classes, this provides essen-
tial information for the modeling, training, and test-
ing of the proposed models. Figures 4 and 5 represent
the values of f f tv and f f tg plotted as intervals. The
definition of specific values of each state is compli-
cated and challenging, given the inclusions and inter-
sections between intervals, as Figures 4 and 5 show.
Therefore, we employed the C4.5 algorithm to ex-
tract knowledge from the dataset, this knowledge is
represented as rules that determine the path from the
root node to a child node containing the class name,
with these paths being based on the attributes f f tv
and f f tg. Table 5 represents the extracted knowl-
edge from the generated DT. Based on the DT results,
each row contains thresholds that are used to create
intervals f f tv
n
and f f tg
m
of each attribute f f tv and
f f tg for each class C. This knowledge is represented
by intervals for classes and converted into a Trape-
zoidal membership function and Fuzzy rules for the
FL model. Table 6 shows an extract of rules from the
DT.
Figure 4: f f tv values for each state.
Figure 5: f f tg values for each state.
The TT is used directly to merge intervals and
avoid rule redundancy, thus considerably reducing the
number of rules and membership functions. This has
proved effective in the computational time taken for
the model ITTDTFL. Table 7 represents the generated
TT used for the inclusion merging process.
In the merging process as described in the
Methodology Section, the model groups the rows by
class where this latter is true equals 1. Then, for each
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis
319
Table 5: An extract of the knowledge using the DT.
if (fftv <= 0.05) then class: Normal state (proba: 100.0%) — based on 1,513 samples
if (fftv <= 0.05) and (fftg <= 0.002) and (fftg <= 0.001) then class: Misalignment fault (proba: 100.0%) — based on 241 samples
if (fftv <= 0.05) and (fftg <= 0.002) and (fftg <= 0.007) and (fftv <= 0.075) and (fftv <= 0.099) and (fftg <= 0.005) then class: Mechanical looseness fault (proba: 100.0%) — based on 32 samples
if (fftv > 0.05) and (fftg <= 0.002) and (fftg <= 0.001) and (fftv <= 0.073) and (fftv <= 0.081) then class: Structural fault (proba: 100.0%) — based on 8 samples
if (fftv > 0.05) and (fftg <= 0.002) and (fftg <= 0.007) and (fftg <= 0.007) then class: Gear fault (proba: 100.0%) — based on 8 samples
if (fftv > 0.05) and (fftg <= 0.002) and (fftg <= 0.007) and (fftg <= 0.007) and (fftg <= 0.007) then class: Gear fault (proba: 100.0%) — based on 1 samples
if (fftv > 0.05) and (fftg <= 0.002) and (fftg <= 0.007) and (fftv <= 0.075) and (fftg <= 0.003) and (fftv <= 0.05) then class: Gear fault (proba: 100.0%) — based on 1 samples
if (fftv > 0.05) and (fftg <= 0.002) and (fftg <= 0.007) and (fftg <= 0.007) and (fftg <= 0.007) then class: Mechanical looseness fault (proba: 100.0%) — based on 1 samples
...
Table 6: Short example of extracted rules from the DT.
rule1= ctrl.Rule( f f tv[’ f f tv
1
’], Class[’Normal state’])
rule2= ctrl.Rule( f f tv[’ f f tv
8
’] & f f tg[’ f f tg
3
’], Class[’Misalignment fault’])
rule3= ctrl.Rule( f f tv[’ f f tv
97
’] & f f tg[’ f f tg
16
’], Class[’Mechanical looseness fault’])
rule4= ctrl.Rule( f f tv[’ f f tv
50
’] & f f tg[’ f f tg
1
’], Class[’Imbalance fault’])
rule5= ctrl.Rule( f f tv[’ f f tv
13
’] & f f tg[’ f f tg
2
’], Class[’Imbalance fault’])
rule6= ctrl.Rule( f f tv[’ f f tv
74
’] & f f tg[’ f f tg
2
’], Class[’Structural fault’])
rule7= ctrl.Rule( f f tv[’ f f tv
5
’] & f f tg[’ f f tg
9
’], Class[’Mechanical looseness fault’])
rule8= ctrl.Rule( f f tv[’ f f tv
76
’] & f f tg[’ f f tg
8
’], Class[’Mechanical looseness fault’])
rule9= ctrl.Rule( f f tv[’ f f tv
19
’] & f f tg[’ f f tg
2
’], Class[’Structural fault’])
rule10= ctrl.Rule( f f tv[’ f f tv
87
’] & f f tg[’ f f tg
11
’], Class[’Mechanical looseness fault’])
Table 7: TT used for the inclusion merging process.
fftv fftg Bearing Lubrication fault Gear fault Imbalance fault Mechanical looseness fault Misalignment fault Normal state Structural fault
f f t v
1
None 0 0 0 0 0 1 0
f f t v
8
f f t g
3
0 0 0 0 1 0 0
f f t v
97
f f t g
16
0 0 0 1 0 0 0
f f t v
50
f f t g
1
0 0 1 0 0 0 0
f f t v
13
f f t g
2
0 0 1 0 0 0 0
column of the attributes f f tv and f f tg, each interval
is compared to other intervals to check for inclusion;
if any inclusion was found, the major interval takes
place in the included interval, and so on. These in-
tervals are converted to membership functions, Fig-
ure 6 represents membership functions of dataset 3
before optimization. Note that the number of gener-
ated membership functions is 130 for fftv and 17 for
f f tg. Algorithm 4 has significantly reduced the num-
ber of membership functions, avoiding useless com-
putational effort. The outputs of the optimized mem-
bership functions are represented in Figure 7. Finally,
by eliminating the redundancies, the TT contains a
significantly reduced number of rules and the inter-
vals used for creating membership functions.
4.2 Experiment Protocol
We conducted a series of experiments and split the
datasets into training (75%) and testing sets (25%).
Table 8 depicts the number of samples used in the
training and testing phases and the total number of
samples of each dataset.
Table 8: Training/Testing samples.
Dataset Total number Training set Testing set
1 4016 3009 1007
2 3048 2284 764
3 7064 5295 1769
4.3 Results & Discussion
Table 9 shows the performances in terms of the num-
ber of generated membership functions for FL-based
models, notably DTFL and ITTDTFL models. Ta-
ble 10 represents the number of generated rules and
the computational time of all models, while Table 11
depicts the classification metrics, including the accu-
racy, sensitivity, F1-score, and ROC area scores.
Table 9: Number of generated Membership Functions.
Model Dataset
Generated Membership Functions number
fftv
fftg
DTFL
1 110 19
2 57 13
3 130 17
ITTDTFL
1 20 7
2 5 10
3 10 7
Regarding computational time and rule number, the
FURIA algorithm took 28.73, 8.74, and 45.6 seconds
for each dataset to be classified, generating 30, 22,
and 31 rules, respectively. RIPPER consistently re-
quired longer computational time, from 302.54 sec-
onds to 1277.68 seconds, generating 17, 14, and 20
rules in each experiment. As it is noticed, although
the number of rules is relatively small, it took a sig-
nificant amount of time in order to give results, sim-
ply because they need to search for all possible rules
that can be used for data classification, as the dataset
size increases, it is expected that a model’s computa-
tional time requirements also proportionally increase.
Apparently, RIPPER’s requirements have exponen-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
320
(a) fftv Membership Function
(b) fftg Membership Function
Figure 6: Membership Functions.
(a) fftv Membership Function (b) fftg Membership Function
Figure 7: Optimized Membership Functions.
tially increased. However, the C4.5 algorithm was
the fastest, with 1.2 seconds on average, due to the
gain ratio method used for splitting the data, which
considers the information gain and the number of val-
ues in an attribute. This helps reduce the number of
splits required to build the decision tree, making the
algorithm faster. In terms of rules, the C4.5 algorithm
has generated 23, 10, and 15 rules with the pruning
process. However, it fell short of the desired perfor-
mance levels in terms of classification accuracy. For
FL-based models, DTFL also took an important com-
putational time due to the number of generated rules,
in the worst case, 287 rules in 364.38 s. Therefore,
it is crucial to reduce the number of rules in order
to build a faster model. Meanwhile, ITTDTFL has
achieved a significant reduction rate of the rules by
approximately 86.87%, from 202 to 28 on dataset 1,
89 to 15 on dataset 2, and 287 to 24 on dataset 3.
Moreover, the number of the generated membership
functions is also notably optimized compared to the
DTFL model, as shown in Table 10, ITTDTFL model
successively reduced the number of generated mem-
bership functions fftv/fftg, from 110/19 to 20/7, 57/13
to 5/10, and 130/17 to 10/7 withing the three datasets.
To better represent the differences between models
and the critical impact of the number of rules on the
computational time, Figure 8 projects the number of
rules on the total time taken by the model in the three
tests.
Table 10: Number of rules and computational time of each
model.
Model Dataset Number of generated rules Runtime (s)
FURIA
1 30 28.73
2 22 8.74
3 31 45.62
RIPPER
1 17 674.24
2 14 302.54
3 20 1277.68
C4.5
1 23 1.51
2 10 0.43
3 15 1.79
DTFL
1 202 127.82
2 89 23.65
3 287 364.38
ITTDTFL
1 28 7.45
2 15 3.1
3 24 16.08
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis
321

Figure 8: Runtime vs rules number plot.
Table 11: Classification performance of each model.
Model Dataset Accuracy (%) Sensitivity F1-Score ROC
FURIA
1 90.28% 0.90 0.90 0.97
2 93.56% 0.93 0.93 0.98
3 91.59% 0.91 0.91 0.97
RIPPER
1 88.14% 0.88 0.88 0.98
2 93.08% 0.93 0.93 0.99
3 91.14% 0.91 0.91 0.99
C4.5
1 88.54% 0.88 0.88 0.98
2 92.78% 0.92 0.92 0.99
3 90.48% 0.90 0.90 0.99
DTFL
1 91.45% 0.91 0.90 0.87
2 95.41% 0.95 0.94 0.92
3 93.15% 0.93 0.93 0.89
ITTDTFL
1 97.91% 0.97 0.97 0.95
2 95.94% 0.95 0.95 0.90
3 98.92% 0.98 0.98 0.95
In terms of accuracy, the results obtained from
the experiments show that all models did a good job
classifying the machine state classes. Considering
the number of correct classifications, all models have
achieved high accuracy rates, with only a few misclas-
sifications. FURIA, RIPPER, and C4.5 have shown
good performances during the different experiments.
As expected from these evaluations and others in the
literature, FURIA gave the best results, correctly clas-
sifying data ranging from 90.28% to 93.56%, for FU-
RIA, 88.14% to 93.08% for RIPPER, while C4.5 cor-
rectly classified 88.54% to 92.78%. For FL-based
models, the DTFL model also gave good results in
terms of accuracy, ranging from 91.45% to 93.49%.
Meanwhile, ITTDTFL exhibited excellent accuracies
for the three data sets, it attended 95.94%, 97.91%,
and 98.92%, accurately classifying the data, enhanc-
ing the DTFL model’s accuracy by 4.55% and out-
performed FURIA, RIPPER, C4.5 successively by
6.92%, 7.5%, 7.32%. These results can be explained
by the fact that TT can preserve the most accurate
and meaningful membership function corresponding
to each class, improving the precision of each fuzzy
rule and leading to better classification accuracy. In
terms of other metrics, as shown in Table 11, consid-
ering 0.9-1.0 is Excellent, and 0.8-0.9 is Good, all the
models achieved good to excellent scores in ROC area
metric, as well as for sensitivity and F1-score metrics.
To sum up, ITTDTFL successfully optimizes the
number of membership functions and accurately in-
ducts rules for the FL model. DT is used to generate
intervals and rules from the paths of each branch. At
the same time, TT eliminates inclusions within gen-
erated intervals from these paths, addressing the is-
sue of duplicated sub-trees and enhancing feature cap-
ture. This approach results in significantly reduced
computational time and improved classification per-
formance. Compared to the related work’s results,
the ITTDTFL model has significantly outperformed
FURIA, RIPPER, C4.5 algorithm, and DTFL model
by 4.55% to 7.5% in terms of accuracy and computa-
tional time. The ITTDTFL model is very interpretable
and easy to manipulate due to its simple structure, do-
main expert involvement, transparent algorithms, and
Human-Understandable rules.
5 CONCLUSIONS & FUTURE
WORKS
This paper proposes a fusion between TT, FL, and
DT to generate optimized membership functions and
rules for FL. This combination shows promising re-
sults for the multi-classifications domain. The TT is
the key in the ITTDTFL model, it generates accu-
rate and optimized membership functions and rules.
The ITTDTFL model has successfully outperformed
the most known multi-classification models, such as
FURIA, RIPPER, C4.5, and DTFL. A notable advan-
tage of integrating the TT into this process is the sig-
nificant rule number reduction by 86.87%. This fu-
sion played a significant role in improving the op-
timized rules’ generation and enhancing their preci-
sion. Which in turn leads to achieving impeccable
accuracies in data classification as well as in compu-
tational time. ITTDTFL has successfully reduced the
computational time for the DTFL model by 92.87%,
enhancing its accuracy by 4.55%. At the same time,
passing the other models, FURIA, RIPPER, and C4.5,
successively by 6.92%, 7.5%, and 7.32%. Real ma-
chine fault datasets were used for the evaluation. It
has seven classes and Two complicated attributes (ve-
locity and acceleration spectrums), noting that hav-
ing more attributes would enhance the precision of
the rules and, consequently, the model. This model
offers promising potential for delivering accurate re-
sults in real-time. Demonstrating its versatility, this
model is highly interpretable and can be applied to
various classification issues beyond machine condi-
tion diagnosis. Thus, the next step is to apply this
model to the datasets used in the literature, such as
UCI and Statlib repositories, as well as investigate
the integration of multi-objective optimization using
Evolutionary algorithms, such as genetic algorithms,
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
322

which will certainly enhance the model’s capabilities
of accurately classifying the data as well as its com-
putational time requirements.
REFERENCES
Al-Shammaa, M. and Abbod, M. F. (2014). Automatic
generation of fuzzy classification rules from data. In
Proc. of the 2014 International Conference on Neural
Networks-Fuzzy Systems (NN-FS 14), Venice.
Angelov, P. P. and Buswell, R. A. (2003). Automatic gener-
ation of fuzzy rule-based models from data by genetic
algorithms. Information Sciences, 150(1-2):17–31.
Bertsimas, D. and Dunn, J. (2017). Optimal classification
trees. Machine Learning, 106:1039–1082.
Chi, Z., Yan, H., and Pham, T. (1996). Fuzzy algorithms:
with applications to image processing and pattern
recognition, volume 10. World Scientific.
Chiu, S. (1997). Extracting fuzzy rules from data for func-
tion approximation and pattern classification.
Cintra, M. E., Monard, M. C., and Camargo, H. A. (2013).
A fuzzy decision tree algorithm based on c4. 5. Math-
ware & Soft Computing, 20(1):56–62.
Cohen, W. W. (1995). Fast effective rule induction. In Ma-
chine learning proceedings 1995, pages 115–123. El-
sevier.
Durkin, J. (1990). Research review: Application of expert
systems in the sciences. The Ohio Journal of Science,
90(5):171–179.
Elbaz, K., Shen, S.-L., Zhou, A., Yuan, D.-J., and Xu, Y.-S.
(2019). Optimization of epb shield performance with
adaptive neuro-fuzzy inference system and genetic al-
gorithm. Applied Sciences, 9(4):780.
G
´
omez-Skarmeta, A. F., Delgado, M., and Vila, M. A.
(1999). About the use of fuzzy clustering techniques
for fuzzy model identification. Fuzzy sets and systems,
106(2):179–188.
Gonzblez, A. and P
´
erez, R. (1999). Slave: A genetic learn-
ing system based on an iterative approach. IEEE
Transactions on fuzzy systems, 7(2):176–191.
Hambali, A., Yakub, K., Oladele, T. O., and Gbolagade,
M. D. (2019). Adaboost ensemble algorithms for
breast cancer classification. Journal of Advances in
Computer Research, 10(2):31–52.
Hentout, A., Maoudj, A., and Aouache, M. (2023). A re-
view of the literature on fuzzy-logic approaches for
collision-free path planning of manipulator robots. Ar-
tificial Intelligence Review, 56(4):3369–3444.
Hssina, B., Merbouha, A., Ezzikouri, H., and Erritali, M.
(2014). A comparative study of decision tree id3 and
c4. 5. International Journal of Advanced Computer
Science and Applications, 4(2):13–19.
H
¨
uhn, J. and H
¨
ullermeier, E. (2009). Furia: an algorithm
for unordered fuzzy rule induction. Data Mining and
Knowledge Discovery, 19:293–319.
H
¨
uhn, J. C. and H
¨
ullermeier, E. (2010). An analysis of
the furia algorithm for fuzzy rule induction. In Ad-
vances in Machine Learning I: Dedicated to the Mem-
ory of Professor Ryszard S. Michalski, pages 321–344.
Springer.
H
¨
ullermeier, E. (2011). Fuzzy sets in machine learning and
data mining. Applied Soft Computing, 11(2):1493–
1505.
Kerarmi, A., Kamal-idrissi, A., Seghrouchni, A. E. F., et al.
(2022). An optimized fuzzy logic model for proactive
maintenance. In CS & IT Conference Proceedings,
volume 12. CS & IT Conference Proceedings.
Kontogiannis, D., Bargiotas, D., and Daskalopulu, A.
(2021). Fuzzy control system for smart energy man-
agement in residential buildings based on environ-
mental data. Energies, 14(3):752.
Mousavi, S. M., Tavana, M., Alikar, N., and Zandieh, M.
(2019). A tuned hybrid intelligent fruit fly optimiza-
tion algorithm for fuzzy rule generation and classifi-
cation. Neural Computing and Applications, 31:873–
885.
Mutlu, B., Sezer, E. A., and Akcayol, M. A. (2018). Auto-
matic rule generation of fuzzy systems: A compar-
ative assessment on software defect prediction. In
2018 3rd International Conference on Computer Sci-
ence and Engineering (UBMK), pages 209–214.
Prado, R., Garcia-Gal
´
an, S., Exposito, J. M., and Yuste,
A. J. (2010). Knowledge acquisition in fuzzy-
rule-based systems with particle-swarm optimization.
IEEE Transactions on Fuzzy Systems, 18(6):1083–
1097.
Quinlan, J. R. (2014). C4. 5: programs for machine learn-
ing. Elsevier.
Reddy, G. T., Reddy, M. P. K., Lakshmanna, K., Rajput,
D. S., Kaluri, R., and Srivastava, G. (2020). Hybrid
genetic algorithm and a fuzzy logic classifier for heart
disease diagnosis. Evolutionary Intelligence, 13:185–
196.
Ren, Q., zhang, H., Zhang, D., Zhao, X., Yan, L., and Rui,
J. (2022). A novel hybrid method of lithology identi-
fication based on k-means++ algorithm and fuzzy de-
cision tree. Journal of Petroleum Science and Engi-
neering, 208:109681.
Rzeszucinski, P., Sinha, J. K., Edwards, R., Starr, A., and
Allen, B. (2012). Normalised root mean square and
amplitude of sidebands of vibration response as tools
for gearbox diagnosis. Strain, 48(6):445–452.
Tran, T. T., Nguyen, T. N., Nguyen, T. T., Nguyen, G. L.,
and Truong, C. N. (2022). A fuzzy association rules
mining algorithm with fuzzy partitioning optimization
for intelligent decision systems. International Journal
of Fuzzy Systems, 24(5):2617–2630.
Varshney, A. K. and Torra, V. (2023). Literature review
of the recent trends and applications in various fuzzy
rule-based systems. International Journal of Fuzzy
Systems, pages 1–24.
Witten, I. H., Frank, E., Hall, M. A., Pal, C. J., and Data,
M. (2005). Practical machine learning tools and tech-
niques. In Data mining, volume 2, pages 403–413.
Elsevier Amsterdam, The Netherlands.
Zadeh, L. A. (1965). Fuzzy sets. Information and control,
8(3):338–353.
Optimization of Fuzzy Rule Induction Based on Decision Tree and Truth Table: A Case Study of Multi-Class Fault Diagnosis
323
