
Semantic and Horizon-Based Feature Matching for Optimal Deep Visual
Place Recognition in Waterborne Domains
Luke Thomas
1
, Matt Roach
1 a
, Alma Rahat
1 b
, Austin Capsey
2
and Mike Edwards
1 c
1
Swansea University, Swansea, U.K.
2
UK Hydrographics Office, Taunton, Somerset, U.K.
Keywords:
Place Recognition, Waterborne Imagery, Region Proposal, Image Segmentation, Unsupervised Learning.
Abstract:
To tackle specific challenges of place recognition in the shoreline image domain, we develop a novel Deep
Visual Place Recognition pipeline minimizing redundant feature extraction and maximizing salient feature
extraction by exploiting the shoreline horizon. Optimizing for model performance and scalability, we present
Semantic and Horizon-Based Matching for Visual Place Recognition (SHM-VPR). Our approach is motivated
by the unique nature of waterborne imagery, namely the tendency for salient land features to make up a
minority of the overall image, with the rest being disposable sea and sky regions. We initially attempt to
exploit this via unsupervised region proposal, but we later propose a horizon-based approach that provides
improved performance. We provide objective results on both a novel in-house shoreline dataset and the already
established Symphony Lake dataset, with SHM-VPR providing state-of-the-art results on the former.
1 INTRODUCTION
Waterborne imagery is an emerging domain within
computer vision, recent works include surveys on col-
lision avoidance (Zhang et al., 2021) in order to pre-
vent the loss and damage of autonomous vessels as
well as fully automated navigation proposals using
deep learning techniques (Yan et al., 2019; Xue et al.,
2019a; Xue et al., 2019b).
Visual place recognition (VPR) is a computer
vision task based on extracting features from geo-
labelled imagery and learning a good representation
to perform image retrieval. In other words, given a
query image of some location, we would like to re-
trieve an image of the same location so that an end
user can find where they are. For land imagery, bench-
mark datasets for VPR are numerous due to a large
demand for AI autonomous car system training, how-
ever datasets for autonomous vessels are rare due to
the area being more niche.
Waterborne image sets do exist, such as
MaSTr1325 (Bovcon et al., 2019) for pixel-wise la-
belling tasks and the Singapore Maritime Dataset for
object detection (Moosbauer et al., 2019). However,
those designed for VPR specifically are mostly lim-
a
https://orcid.org/0000-0002-1486-5537
b
https://orcid.org/0000-0002-5023-1371
c
https://orcid.org/0000-0003-3367-969X
ited to inland water regions such as rivers and lakes
(Griffith et al., 2017; Steccanella et al., 2020).
In this work we present a number of experi-
ments with the Semantic and Spatial Matching Visual
Place Recognition (SSM-VPR) pipeline (Camara and
P
ˇ
reu
ˇ
cil, 2019) that attempt to maximise performance
on an in-house shoreline imagery dataset covering the
area of the Plymouth Sound, UK. We modify SSM-
VPR a number of times and apply each version to this
dataset as well as the Symphony Lake dataset (Grif-
fith et al., 2017) to facilitate a comparison between
shoreline and inland water-based imagery.
We modify SSM-VPR in a number of ways, find-
ing that the most effective modification of the pipeline
for dealing with shoreline imagery is to encourage
structural consistency of features along the visible
horizon between a query and retrieval, creating a
novel pipeline that we dub Semantic and Horizon
Based Matching Visual Place Recognition (SHM-
VPR).
Before SHM-VPR, we theorised that unsuper-
vised region proposal could mimic real world naviga-
tion techniques, where landmark identification is pre-
ferred over a more computer-like brute force search.
We experimented with two separate unsupervised re-
gion proposal methods, Selective Search (Uijlings
et al., 2013) and a unique method proposed in the
rOSD paper (Vo et al., 2020).
Thomas, L., Roach, M., Rahat, A., Capsey, A. and Edwards, M.
Semantic and Horizon-Based Feature Matching for Optimal Deep Visual Place Recognition in Waterborne Domains.
DOI: 10.5220/0012376000003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 761-770
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
761

A key part of our novel pipeline is the use of the
WaSR segmenter (Bovcon and Kristan, 2021) to clas-
sify which pixels represent land, sea and sky. As we
will see later, WaSR also allows us to identify feature
devoid images containing no land information, which
are typically not retrieved successfully as there are no
useful locational features visible. These images un-
fairly offset metrics such Precision-Recall Curves and
makes performance difficult to gauge. Using WaSR
to calculate how many pixels in each image repre-
sent land lets us filter out feature devoid images via a
threshold, giving a clearer reflection of actual model
performance.
Ultimately, we find our SHM-VPR pipeline to
provide state of the art results on our in-house shore-
line image dataset, although we note that it is a
domain-specific pipeline, and does not translate to in-
land locational imagery. SHM-VPR works by using
the pixel-wise labellings from WaSR to extract an ap-
proximated horizon line by finding the y position of
the first land labelled pixel in each column of the im-
age, then projecting these coordinates onto a feature
map. The projected horizon line is then used to guide
a sliding window by keeping it centred on the y coor-
dinates as it moves along the x axis, extracting a row
of structural vectors along the horizon.
2 RELATED WORK
2.1 Finding Salient Information in
Shoreline Imagery
In Visual Place Recognition, detecting notable land-
marks is an integral part of early handcrafted meth-
ods. For example, Scale Invariant Feature Trans-
form (SIFT) (Lowe, 1999) focuses on the identifica-
tion of invariant key points which are then used to
form descriptors. With land imagery, notable land-
marks come in a variety of forms and can be located
at various different positions in an image. However
we find that shoreline imagery lacks these traditional
conspicuous landmark structures.
In the majority of shoreline images, the top and
bottom halves are made up mostly of sky and sea re-
spectively, both of which are largely redundant for
place recognition as they have no inherently notable
features. Having the sky be so prominent in an im-
age also introduces unwanted variation depending on
time, weather conditions and cloud formations. Land
images suffer less from this as the sea and sky are
normally both less prominent. Furthermore weather
conditions such as fog more negatively impact shore-
line imagery since distant land become almost totally
concealed.
Increasing distance between the capture camera
and shore compounds these issues, as the shoreline
itself will appear progressively smaller, taking up a
smaller percentage of the image. This also intro-
duces a hardware limitation, where only high reso-
lution cameras are still capable of capturing detailed
shoreline features. When traditional landmark fea-
tures such as buildings are no longer captured in de-
tail, relying on general topology becomes more nec-
essary.
Sky and sea sections impacting activation maps
can be remedied by using a segmentation model such
as WaSR (Bovcon and Kristan, 2021) to mask out
these areas before making a forward pass on an im-
age, however this leaves the images with a lot of blank
space. We could crop the image down to the land area
but to still get standardized feature maps they would
need to be resized, distorting visible topology. Errors
in the prediction mask could also offset the crop in
cases where there are pixels above or below the shore
erroneously identified as land.
The overall challenge here is to first identify
which part of the image contains land features and,
secondly, to make sure the pipeline is extracting as
much feature rich information from this subset as pos-
sible.
2.2 SSM-VPR: Semantic and Spatial
Matching Visual Place Recognition
The pipeline we have chosen to focus our study
around is SSM-VPR, a two stage pipeline pub-
lished by Camara and Preucil in 2019 (Camara and
P
ˇ
reu
ˇ
cil, 2019). SSM-VPR uses the VGG16 net-
work (Simonyan and Zisserman, 2014) pre-trained on
Places205 (Zhou et al., 2014) as a backbone for gener-
ating feature maps that are then divided into localized
sub-regions and vectorized in a two stage approach.
Stage 1 applies a sliding window to designate a set
of sub-regions, these are then vectorized and added to
the Image Filtering Database (IFDB), storing multi-
ple vectors per image in this way makes the model ro-
bust to viewpoint changes because as previous works
have discovered, using multiple region vectors boosts
performance for visual place recognition (S
¨
underhauf
et al., 2015; Chen et al., 2017b; Khaliq et al., 2019).
Stage 2 performs a similar procedure with a
smaller sliding window, designating a new set of
many fine sub-regions containing structural details
from the feature map. These are then vectorized and
added to the Spatial Matching Database (SMDB).
Once the IFDB and SMDB are built the pipeline
can then be passed a query image which it extracts
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
762

the same two sets of vectors from. Stage 1 query vec-
tors are matched one by one to a set of nearest neigh-
bours in the IFDB, images associated with these re-
ceive points on a histogram. The top N scores then
make up the initial retrieval images.
Stage 2 acts as a re-ranking stage (Tolias et al.,
2015) where query and retrieval image SMDB vectors
are spatially re-arranged into the order they were pre-
viously extracted via sliding window. Spatial Match-
ing is then performed, identifying anchor points be-
tween the query and each individual retrieval. For
each anchor point we check the surrounding vectors
and each time a pair of vectors at the same location
relative to their anchor points are found to be a clos-
est match, the retrieval receives a point on a new his-
togram which is used for re-ranking.
SSM-VPR outperforms several state-of-the-art vi-
sual place recognition models on five benchmark
datasets (Camara and P
ˇ
reu
ˇ
cil, 2019). It has also had a
follow-up paper, where a frame correlation technique
was built in to further improve performance by pro-
moting retrievals that are consistent with previously
identified locations (Camara et al., 2020).
2.3 WaSR: Water Segmentation and
Refinement
WaSR is an obstacle detection network intended for
use on small Unmanned Surface Vehicles (USV)
which instead of using expensive heavyweight range
sensors such as RADAR, LIDAR or SONAR
(Onunka and Bright, 2010; Ruiz and Granja, 2009;
Heidarsson and Sukhatme, 2011) seek to use com-
puter vision enabled on-board cameras to minimize
cost and weight (Kristan et al., 2015).
For our work we are only concerned with utilis-
ing WaSR’s segmentation capabilities, which uses a
novel encoder-decoder architecture, with the encoder
generating deep features that are fused with the de-
coder, with an optional Inertial Measurement Unit
(IMU) feature channel used to aid in the detection of
the water-edge (Bovcon et al., 2018).
The IMU measurement encoder allows the model
to use encoded inertial data to project the horizon onto
the image itself to aid in detecting the precise water
edge, which is particularly challenging for a convolu-
tional encoder to detect alone as camera haze induced
by weather conditions or water obstructing the cam-
era blurs feature maps around the true water edge.
The encoder is based on the segmentation back-
bone from DeepLab (Chen et al., 2017a) which ap-
plies atrous convolutions to ResNet101. The encoder
uses the output of residual blocks 2, 3, 4 and 5 to
leverage both the generalized, low resolution features
from the later blocks with the more fine high resolu-
tion information of the earlier blocks. These features
are then passed to the decoder where they are fused
with information from the IMU encoder in order to
refine the final segmentation.
2.4 Region Proposal Methods
Region Proposal is a subset of object detection, where
the task is to try and identify which areas of an im-
age contain object-like features. The first of these
methods were algorithms such as Selective Search
(Uijlings et al., 2013), but recently end-to-end train-
able Region Proposal Networks (RPN) such as Faster-
RCNN (Ren et al., 2015) have been developed, which
use fully-convolutional networks to predict object
bounds and per-pixel objectness scores.
Region Proposal Nets can achieve state of the art
results on region proposal tasks, however this requires
a dedicated image set with ground truth object labels
and bounding boxes to facilitate training. For land im-
agery this is not an issue as their are many open source
Region Proposal Nets pre-trained on datasets such as
ImageNet (Deng et al., 2009). However, because we
are dealing with shoreline imagery whose common
features are drastically different to the kinds found in
ImageNet, these pre-trained nets do not translate to
our data.
Designing new ground truth bounding boxes and
class labels for this new domain would be an incredi-
bly time consuming task and would likely require in-
sight from expert skippers or geographers. As com-
puter vision researchers, our knowledge on shoreline
geography and which land formations would count as
independent classes is also limited.
Therefore we opt to use unsupervised region pro-
posal algorithms, as these methods have some po-
tential to translate over to our domain by pointing
out unique geographical features. It also provides
an interesting opportunity to analyse what features
these algorithms identify as object-like when pre-
sented with this new domain.
Being the most common method, Selective Search
is an obvious retrieval, combining typical exhaustive
search with segmentation. Initially a given image is
sub-segmented into various small regions and from
then on the program begins a loop of taking two sim-
ilar regions from the set and combining them into a
larger region until we get a final set of individual seg-
mentations, whose vertical and horizontal bounds are
used to make bounding boxes.
Selective Search can be computationally expen-
sive for large images queries, one of the driving forces
for the development of Fast R-CNN (Girshick, 2015),
Semantic and Horizon-Based Feature Matching for Optimal Deep Visual Place Recognition in Waterborne Domains
763
which instead projects region proposals from a larger
image onto it’s CNN feature maps and Faster R-CNN
(Ren et al., 2015), which uses it’s RPN to propose re-
gions based on the feature map itself, and, because
feature maps are dimensionally much smaller, this re-
sults in a faster computation. Selective Search itself
can also be applied on feature maps directly, however
it is not trained to work with such smaller dimensional
data in the way that Faster R-CNN is.
There have been newer algorithms for region pro-
posals since selective search was made, such as in Vo
et al’s (Vo et al., 2020) work, where in the process of
building upon the object and structure and discovery
problem (OSD) the authors presented their own re-
gion proposal algorithm. The algorithm in question is
based on the idea that, when summed along the filter
axis, CNN feature maps act as a single channel im-
age where objects from the original are represented
as clusters of high activations.
This method finds a set of local maxima within a
summed feature map using persistence measurement
(Chazal et al., 2013), and for each maxima a new fea-
ture map is generated by creating a dot product be-
tween the original CNN feature map and the feature
vector at the position of the maxima. The feature map
produced from this dot product is then summed along
the filter axis much like before to get a new image,
where the connected components algorithm is then
applied with a bounding box around the component
being the proposed region.
3 METHODOLOGY
3.1 Datasets
3.1.1 Symphony Lake
To measure performance on an existing dataset, we
use the Symphony Lake image set (Griffith et al.,
2017), which covers a single lake in Metz, France, a
relatively compact inland area. The autonomous ves-
sel used for capture traverses along the lake edge so
not a great distance from shore, as such the dataset is
not a huge departure from typical land imagery. It is
comprised of various individual runs around the lake
between 2014 and 2017, providing coverage of the lo-
cations under different weathers, times and seasons.
For evaluation we use leave-one-out cross valida-
tion with seven randomly chosen image set runs, so
that the model can be evaluated on several unseen runs
while avoiding too much information from previous
runs leaking into the retrieval set.
3.1.2 Plymouth Sound Dataset
Our in-house dataset covers an area of the South
Coast of England, UK. The image set consists of 7
runs within this area between March and April 2022,
beginning from Turnchapel Wharf and taking var-
ious different routes within the area before return-
ing. Images were captured from on-board mounted
cameras attached to the IBM/Promare Mayflower Au-
tonomous Ship.
The dataset mostly consists of images taken far
from nearby shores, as well as some taken much
closer to shore as the vessel proceeded to embark
and disembark on each run. This makes the image
set unique as locational features are typically more
sparse and far away from the camera, meaning fea-
ture visibility can change drastically depending on
weather conditions, furthermore redundant informa-
tion (i.e Sea and Sky) is ever-present, with statistics
from WaSR segmentations suggesting that on average
only 5% of pixels in the image set are “land”, however
this statistic is greatly influenced by the large number
of images of open sea.
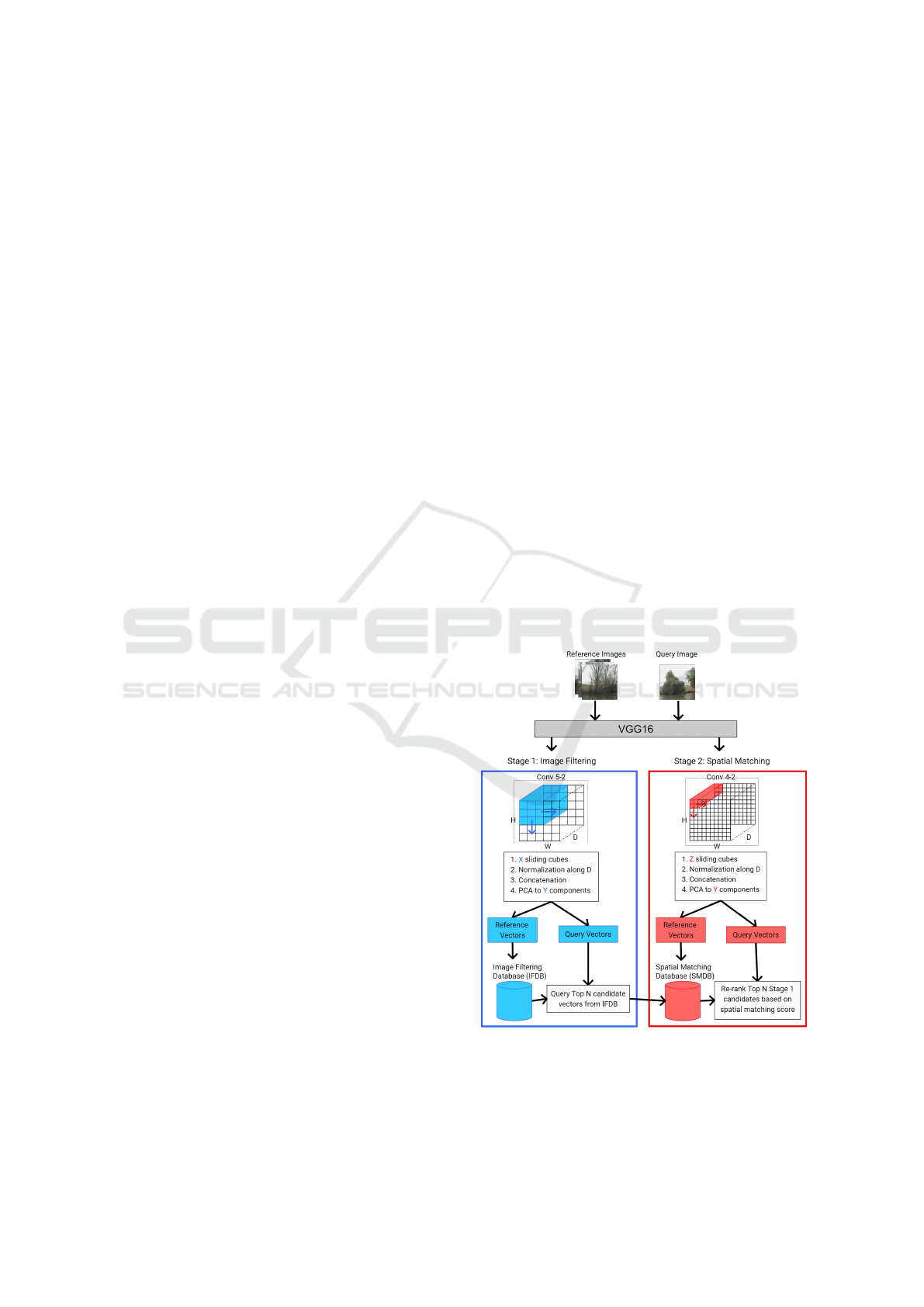
3.2 Pipelines
3.2.1 Base SSM-VPR
Figure 1: The pipeline of Base SSM-VPR, as described in
(Camara and P
ˇ
reu
ˇ
cil, 2019).
Depicted in Figure 1 is the original SSM-VPR
pipeline, for stage 1 we use the suggested resolution
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
764
of 224 × 224 for our images, producing a feature map
of 14 × 14 × 512 over which we use a sliding win-
dow of 9× 9 for sub-region extraction. Resolution for
stage 2 is 448 × 448, which was found to be more ef-
fective in the pipelines follow up paper (Camara et al.,
2020), resulting in a feature map of 56 × 56 × 512 di-
mensions, the sliding window applied to this map has
a dimension of 3 × 3.
We made one change concerning the extraction
of sub-regions in both stages, we noticed that be-
cause the VGG16 backbone uses same padding for
each convolutional layer the edges of each feature
map become highly activated, adding false edge fea-
tures to the search databases. Therefore we limit the
range of the sliding windows to avoid the edges of
the feature maps. All hyper parameters were based
on those defined by the SSM-VPR code on Github
(https://github.com/Chicone/SSM-VPR/).
3.2.2 Selective Search Based SSM-VPR
This pipeline incorporates selective search into SSM-
VPR stage 1 as an alternative to sliding window. In-
put images are now scaled to the same resolution as
stage 2 in order to return a larger feature map from
which selective search can extract an adequate num-
ber of suggested regions from.
Once a feature map is returned, a copy is made and
summed along the filter axis to produce a 1-D image
for selective search, the top N regions are then fed to a
Region Of Interest (ROI) Pooling layer along with the
original feature map, producing a set of 9 × 9 × 512
pooled sub-regions. We chose to pool to this resolu-
tion to maintain consistency for stage 1 sub-regions
across pipeline versions.
3.2.3 rOSD Region Proposal Based SSM-VPR
This pipeline operates similarly to the previous, swap-
ping out selective search region proposal for the
method described in the rOSD paper (Vo et al., 2020).
Because it is recommended to take input feature maps
from multiple layers of VGG16, we pass input images
up to two different convolutional layers of VGG16,
Conv 5-3 and Conv 4-3 as suggested in (Vo et al.,
2020), resulting in two feature maps per input image.
Copies of the maps are made, summed along the
filter axis and have rOSD region proposal applied to
them, we take N/2 suggested regions from both to get
N overall suggestions.
These suggestions are then fed to an ROI Pooling
layer along with the Conv 5-3 output feature map as
input, once again giving us a set of 9× 9 × 512 pooled
sub-regions. All other hyper parameters and parts of
the pipeline remain unchanged.
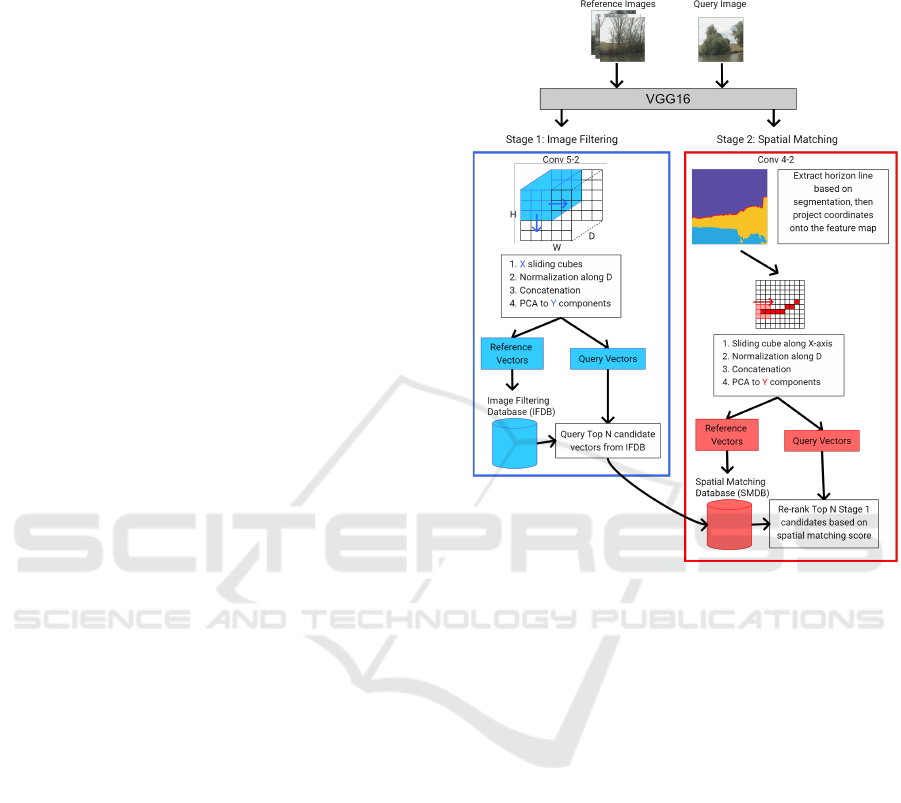
3.2.4 Semantic and Horizon-Based Matching for
Visual Place Recognition
Figure 2: Our SHM-VPR pipeline, here SSM-VPR stage 1
is kept the same as baseline but stage 2 now uses an esti-
mated horizon line based on WaSR and projects it onto the
feature map, the sliding window then moves along the map
in a single row across the x-axis, using the y coordinate of
the projected horizon line at each step.
The last version is our proposed SHM-VPR model,
this model keeps stage 1 of SSM-VPR the same and
focuses on making edits to stage 2. This method is
dependent on the WaSR segmenter and leverages it’s
prediction mask to extract a set of coordinates that
represent the position of the horizon line in the image.
Using these coordinates, stage 2 applies a sliding
window that only moves across the x axis of the fea-
ture map once, with the y coordinate at each step be-
ing determined by projecting the horizon line onto the
feature map and getting a set of approximate coordi-
nates.
This leaves a single row of stage 2 sub-regions,
exponentially reducing the number of vectors in the
SMDB. The spatial matching stage, which checks
for closest neighbour consistency around spatially
arranged anchor vectors between a query and re-
trieval still works but now only needs to check clos-
est neighbours around these anchors in a single di-
mension rather than checking for closest neighbours
Semantic and Horizon-Based Feature Matching for Optimal Deep Visual Place Recognition in Waterborne Domains
765

in 2 dimensions using baseline SSM-VPR’s grid of
extracted vectors.
The motivation is that throughout testing the hori-
zon line was the most consistently activated feature.
Landmarks such as buildings only make up a small
portion of the image and at long distance have limited
resolution, producing few highly activated features,
so now the re-ranking stage is more focused on spa-
tially matching only the most visually apparent and
variable structure of the shoreline images.
4 EVALUATION
4.1 Quantitative Analysis
After collecting PR curves the seven test folds of both
datasets using base SSM-VPR, we can see from the
top plots in Figure 3 that results are consistently high
for Symphony Lake whereas there is a lot of varia-
tion in test folds for the Plymouth Sound dataset. To
explain this variance, a closer look is needed for the
imagery in the dataset.
Because the Plymouth Sound dataset was col-
lected using a multi-directional camera system we are
left with a significant number of blank images con-
taining nothing but sky and sea. As expected, these
examples cannot be reasonably retrieved as they have
no useful data, and because they make up a signifi-
cant percentage of each test fold, the effective maxi-
mum recall of each fold is limited. We alleviate this
by using statistics from the WaSR segmenter, calcu-
lating land, air and sea segmentations we get the av-
erage percentage of pixels in the image set that are
land which is around 5%, likely being influenced by
empty images. Using this number as a threshold for
what is an acceptable percentage of land pixels, we
filter out empty images and remove their influence to
get a better understanding of model performance.
After applying this threshold we get the bottom
plots in Figure 3, these curves are now more consis-
tent and are able to reach similar AUC values to the
Symphony Lake evaluations.
We will be utilizing this threshold for all PR curve
comparisons, to ensure evaluation is fair. We will also
be normalizing and averaging PR curves seen in Fig-
ure 3 into a single curve for each version of the SSM-
VPR pipeline for increased clarity.
Looking at PR curves, the selective search and
rOSD regions models perform worse than baseline
SSM-VPR on both datasets, for reasons we will dis-
cuss in our qualitative analysis it is clear that although
still functional, the ability of these pipelines to extract
meaningful sub-regions of various sizes as opposed to
the fixed sub-regions of baseline falls short.
These methods add extra complexity and thus in-
ference time is slower on average, so unless we make
further edits in future, we deem unsupervised region
proposal integration into SSM-VPR to be unsuccess-
ful.
However our fourth pipeline, SHM-VPR, man-
ages to surpass SSM-VPR on Plymouth Sound but has
worse performance on Symphony Lake. This indi-
cates that our method is an improvement for our spe-
cific target domain of shoreline imagery but does not
translate as well to the more small-scale Symphony
Lake.
If we consider scalability however then there is an-
other advantage, to store all of the stage 1 and 2 vec-
tors for SSM-VPR each of our Plymouth Sound test
sets required around 18GB of storage space, most of
which is taken up by the stage 2 vector database due
to the sliding windows small size and the larger ex-
traction feature map of 56× 56 making for 54 × 54 =
4608 valid regions that must be stored as structural
matching vectors.
SHM-VPR only produces 54 vectors per image
for stage 2 because the sliding window does not per-
form an exhaustive search along the y axis for each
x axis coordinate, instead covering a single y coordi-
nate dictated by our approximated horizon line pro-
jection. This means SHM-VPR requires exponen-
tially less storage space for the structural matching
database and stage 2 is more streamlined.
4.2 Qualitative Analysis
Now that we’ve gone over the statistical performance
of each model, we carry out a secondary analysis
of the results by looking at visual representations of
what is happening when each pipeline is applied to
our shoreline imagery.
Figure 5 shows a set of true positives, viable query
images which the pipeline retrieved successfully, false
negatives, viable query images that were not retrieved
successfully and true negatives, unviable query im-
ages as determined by thresholding them based on
land pixel percentage based on segmentation results
from WaSR.
Looking at the true positive set, we see that most
images are those with clear shots of local coastline,
with recognizable shapes and minimal obstructions.
The false negative set contains some images erro-
neously labelled as valid due to interference from ob-
jects such as boats, which WaSR identifies as land
thus boosting their land pixel percentage, this set also
contains some blurred/obstructed images as well as
more clear cut fail cases. The true negatives give a
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
766
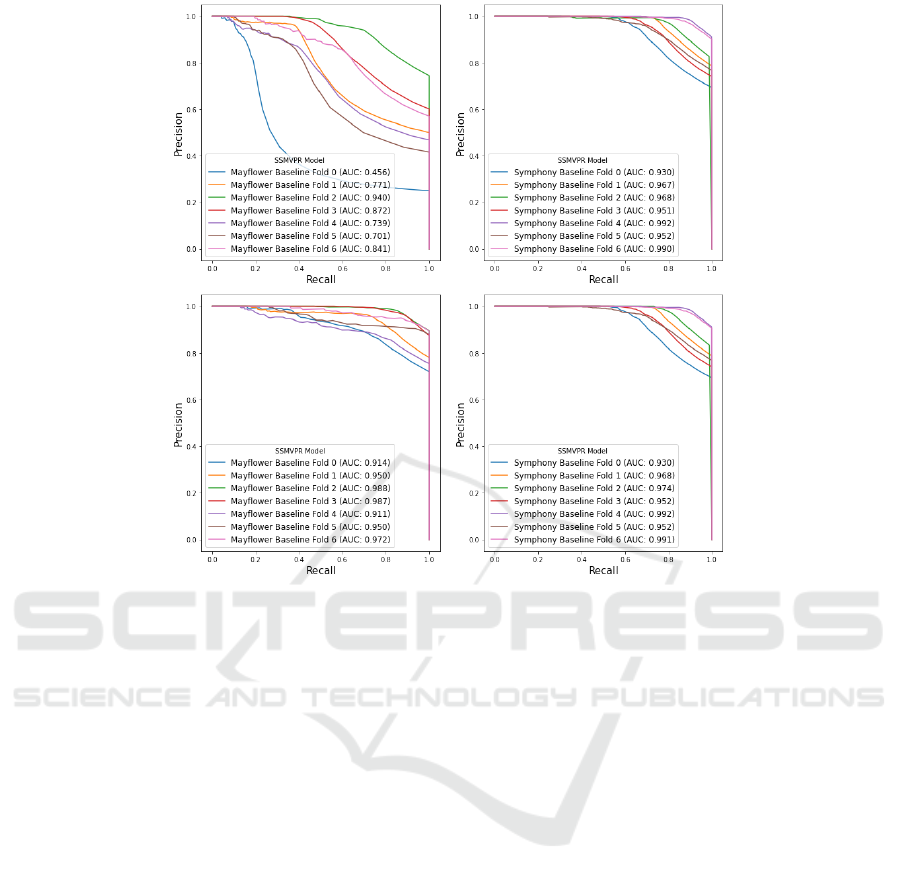
Figure 3: Top plots show PR curves on full dataset, across k-folds, containing samples with <5% land. Bottom plots show
PR curves on the same folds, omitting samples with <5% land after WaSR segmentation.
good example of feature devoid images, most of these
are either pointed out at sea where there is no land in-
formation, are severely lacking in shoreline features
or are so blurred due to water obstruction that WaSR
does not identify the present features as land.
This pattern is largely the same between model
variants, with each having slightly different true pos-
itive and false negative rates, reflected by the pre-
viously discussed PR Curves. To show how each
pipeline interacts with a given query image, we will
dedicate a section to how version 1, 2 and 3 of SSM-
VPR handles stage 1, and another section to show the
difference between the baseline stage 2 methodology,
which is consistent across the first three versions, and
stage 2 of SHM-VPR.
4.2.1 Comparison of Different Approaches to
SSM-VPR Stage 1
Starting with a baseline model, given a query im-
age stage 1 of SSM-VPR takes the activation map
and divides it into a set of fixed regions via sliding
cube. When visualised, we see that each region acts
as a slight perspective shift. When we match retrieval
vectors to each individual vectorized region and rank
them via histogram score based on the image ID as-
signed to each retrieval vector, we make sure that each
image retrieval must match the query across multi-
ple perspectives which incentivizes the return of a re-
trieved image that not only contains the same features
as the query, but also views them from a similar per-
spective and thus from a similar position.
For Selective Search based SSM-VPR, we receive
a number of suggested sub-regions which we then use
for SSM-VPR stage 1 region based vector extraction.
This means that instead of each sub-region represent-
ing a slight perspective shift of the overall image, each
one now represents an area of interest which in theory
should be similar to how mariners point out a series
of landmarks.
We know from the previous section that this
method does not perform as well as the baseline, the
reason for this could be seen in Figure 7, where the
selective search algorithm’s attention is often drawn
away from the land strip by areas of sea and sky.
There is also object interference, in the example a
boat appears in the image and remains visible in the
activation map. Objects like this draw attention from
the selective search algorithm, which is undesirable
for place recognition as it is a variant feature, the boat
could simply move or not be visible at any time if a
picture of the location were to be taken again, adding
Semantic and Horizon-Based Feature Matching for Optimal Deep Visual Place Recognition in Waterborne Domains
767
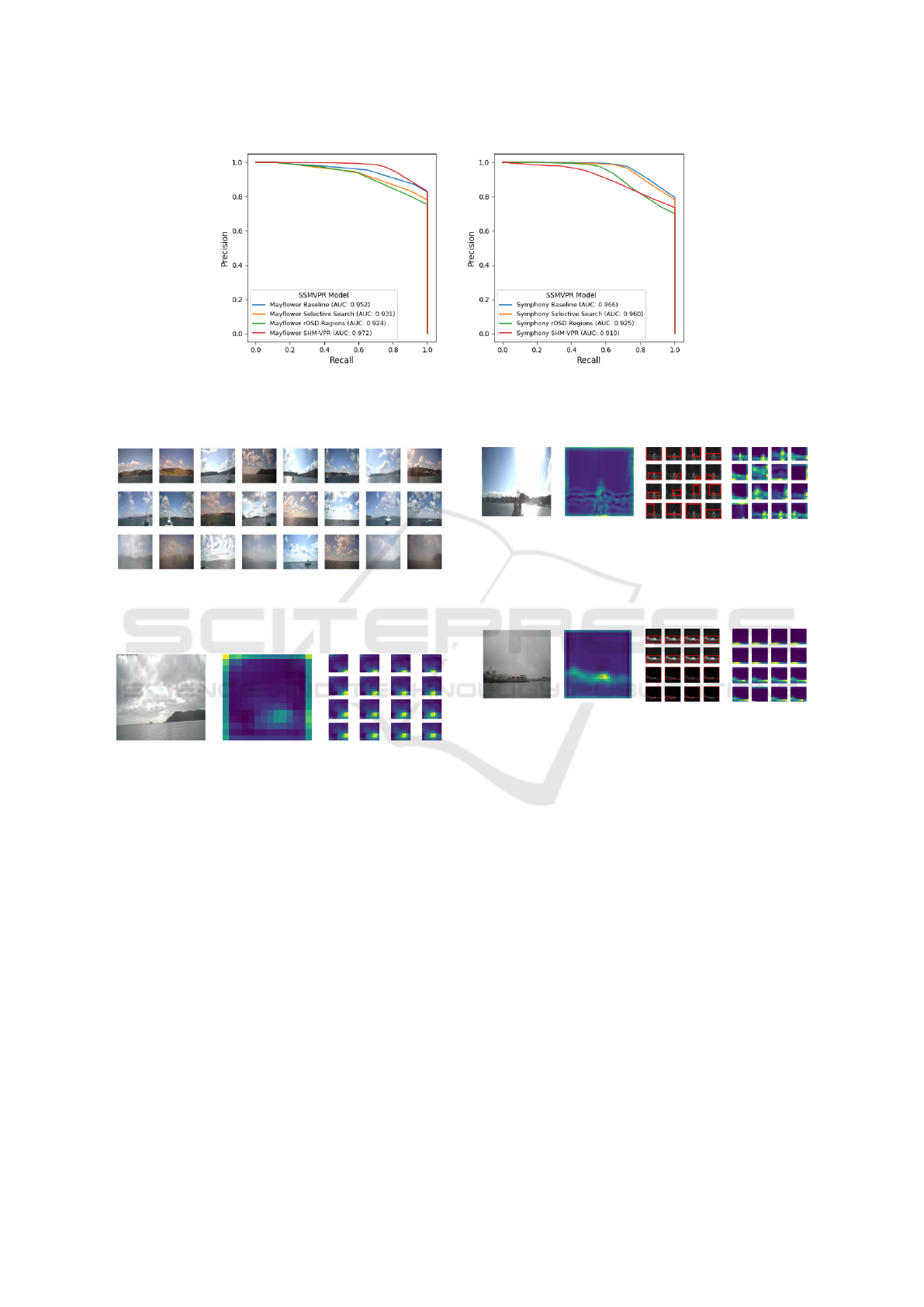
Figure 4: PR Curves for our four model versions on Plymouth Sound (Left) and Symphony Lake (Right), each averaged
across all test folds. Baseline model and Unsupervised Region Proposal variants are consistent across both sets, SHM-VPR
performs best on Plymouth Sound but the worst on Symphony Lake.
Figure 5: A set of True Positive (Top Row), False Negatives
(Middle Row) and True Negatives (Bottom Row) from a
single test fold of the baseline SSM-VPR pipeline.
Figure 6: Example of SSM-VPR semantic regions: For a
single image, the VGG16 activation map is summed along
the filter axis and set of sub-regions are extracted via sliding
window.
erroneous data to our vectors.
Overall it appears selective search is not able to
discern the types of sub-regions across the shore-
line, likely due to it being unsupervised and there-
fore not geared specifically to the shoreline image do-
main. In order to verify the effectiveness of incorpo-
rating unsupervised region proposals into SSM-VPR,
we tested a rOSD region proposal based SSM-VPR
pipeline, however results show this failed to compete
with baseline SSM-VPR.
Given an example of rOSD Region Proposal sug-
gestions on a feature map, we see that it actually man-
ages to single out the shoreline quite effectively, how-
ever the issue here is one of redundancy, most re-
gions are simply repeats of each other. This means
the number of unique sub-regions and perspectives of
Figure 7: Example of SSM-VPR with semantic regions
based on selective search: For this image, the activation is
summed along the filter axis, then selective search region
suggestions are made based on this and a set sub-regions
are extracted based on these.
Figure 8: Example of SSM-VPR with semantic regions
based on the rOSD paper region proposal method: Iden-
tical to Figure 7 only that the suggested regions are using
the rOSD method.
the shoreline is lower even though most notable areas
have been covered.
These examples also showcase that ROI pooling
these regions to maintain consistency may not be
ideal - many patches have seemingly lost their distinc-
tive shapes once pooled and reduced down to simple
edges.
4.2.2 Comparison of Different Approaches to
SSM-VPR Stage 2
As we have already discussed in the pipelines sec-
tion, SSM-VPR stage 2 forms a larger grid of much
finer vectors for each image and for each retrieval re-
ranks them based on the number of spatial consistency
matches across a set of anchor vectors.
This method is very effective for re-ranking as it
ensures the top retrieval is highly spatially equivalent
with the query, making it more likely that the im-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
768
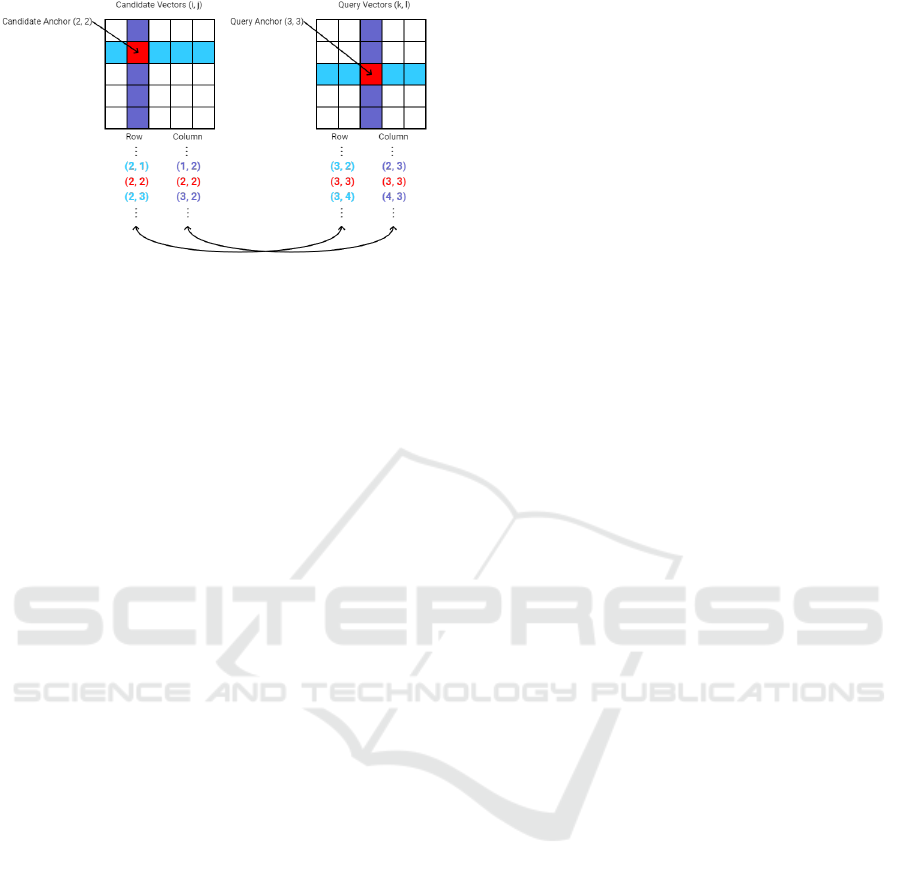
Figure 9: Figure inspired by the original paper (Camara and
P
ˇ
reu
ˇ
cil, 2019). A simplified representation of the spatial
matching stage for a grid of query and retrieval vectors, tak-
ing a pair of anchor points between the two, there surround-
ing vectors along the row and column should also match if
the features are spatially consistent.
age was captured from a similar location/perspective.
However, we hypothesised that as many shoreline im-
ages contained empty space and the sub-regions these
vectors represent are not as broad, the likelihood that
a great deal of the grid was made up of vectors repre-
senting empty space was high.
These redundant vectors hamper the model in two
key ways, they inflate the storage requirements of the
spatial matching database and their inclusion in the
spatial matching calculation reduces inference speed.
The redundant vectors could also be negatively im-
pacting the PCA initialization that SSM-VPR relies
upon for dimensionality reduction as the initialization
batch is based on extracted vectors from a random
sample of reference images and therefore could be in-
fluenced by redundant vectors.
Our proposed solution is the SHM-VPR pipeline,
which uses the WaSR segmentation as a guide for
finding the horizon line, the section that separates the
land/sea from the sky. WaSR allows us to extract this
line for each image by traversing the x-axis of the gen-
erated segmentation map and finding the first y coor-
dinate belonging to the land/sea class within each col-
umn, eventually forming an estimated horizon line.
By projecting these coordinates onto the images
feature map, we can limit the sub-region extraction to
a single set of windows across the x-axis, having the
y-coordinate of each window be equal to the horizon
line projection.
This produces a row of sub-regions rather than a
grid, so the spatial matching stage is more stream-
lined and the amount of storage required for the spa-
tial matching database is also reduced exponentially.
This method exploits the fact that across most
shoreline imagery feature maps the horizon line is a
consistently activated feature, with most smaller land
features being lost after multiple max-pooling oper-
ations due to low resolution caused by distance, so
instead of checking for spatial consistency across the
whole image we limit it to the most structurally vari-
ant region.
5 CONCLUSIONS
For shoreline imagery, we find our proposed SHM-
VPR model outperforms SSM-VPR as it directly tar-
gets the inherent challenge of extracting salient infor-
mation within the images while also trying to navigate
the pipelines attention away from redundant features.
We recognize this is not a universal state-of-the-
art pipeline, but a domain-specific one, as improve-
ments made do not seem to translate to Symphony
Lake, which makes sense as these inland images fea-
ture plenty of information across the whole image and
at smaller distances the horizon is of little relevance
for navigational purposes.
The two augmented versions of SSM-VPR mak-
ing use of unsupervised region proposal are functional
but do not compete with the baseline version, suggest-
ing that for now the brute-force sliding window ap-
proach is still the better method of region extraction.
ACKNOWLEDGEMENTS
This project was funded by the EPSRC Centre for
Doctoral Training in Enhancing Human Interactions
and Collaborations with Data and Intelligence Driven
Systems (EP/S021892/1). For the purpose of Open
Access, the author has applied a CC BY licence to any
Author Accepted Manuscript (AAM) version arising
from this submission. Access to Plymouth Sound im-
agery provided by IBM/Promare in collaboration with
MarineAI under the Mayflower Autonomous Ship
project.
REFERENCES
Bovcon, B. and Kristan, M. (2021). WaSR—A water
segmentation and refinement maritime obstacle de-
tection network. IEEE Transactions on Cybernetics,
52(12):12661–12674.
Bovcon, B., Muhovi
ˇ
c, J., Per
ˇ
s, J., and Kristan, M. (2019).
The MaSTr1325 dataset for training deep USV ob-
stacle detection models. In IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
3431–3438.
Bovcon, B., Per
ˇ
s, J., Kristan, M., et al. (2018). Stereo
obstacle detection for unmanned surface vehicles by
Semantic and Horizon-Based Feature Matching for Optimal Deep Visual Place Recognition in Waterborne Domains
769

IMU-assisted semantic segmentation. Robotics and
Autonomous Systems, 104:1–13.
Camara, L. G., G
¨
abert, C., and P
ˇ
reu
ˇ
cil, L. (2020). Highly
robust visual place recognition through spatial match-
ing of CNN features. In IEEE International Confer-
ence on Robotics and Automation, pages 3748–3755.
Camara, L. G. and P
ˇ
reu
ˇ
cil, L. (2019). Spatio-semantic
convnet-based visual place recognition. In European
Conference on Mobile Robots, pages 1–8.
Chazal, F., Guibas, L. J., Oudot, S. Y., and Skraba, P.
(2013). Persistence-based clustering in Riemannian
manifolds. Journal of the ACM, 60(6):1–38.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K.,
and Yuille, A. L. (2017a). Deeplab: Semantic im-
age segmentation with deep convolutional nets, atrous
convolution, and fully connected crfs. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
40(4):834–848.
Chen, Z., Maffra, F., Sa, I., and Chli, M. (2017b). Only look
once, mining distinctive landmarks from convnet for
visual place recognition. In IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
9–16.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In IEEE Conference on Computer
Vision and Pattern Recognition, pages 248–255.
Girshick, R. (2015). Fast R-CNN. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 1440–1448.
Griffith, S., Chahine, G., and Pradalier, C. (2017). Sym-
phony lake dataset. International Journal of Robotics
Research, 36(11):1151–1158.
Heidarsson, H. K. and Sukhatme, G. S. (2011). Obstacle de-
tection and avoidance for an autonomous surface ve-
hicle using a profiling sonar. In IEEE International
Conference on Robotics and Automation, pages 731–
736.
Khaliq, A., Ehsan, S., Chen, Z., Milford, M., and
McDonald-Maier, K. (2019). A holistic visual place
recognition approach using lightweight CNNs for sig-
nificant viewpoint and appearance changes. IEEE
Transactions on Robotics, 36(2):561–569.
Kristan, M., Kenk, V. S., Kova
ˇ
ci
ˇ
c, S., and Per
ˇ
s, J. (2015).
Fast image-based obstacle detection from unmanned
surface vehicles. IEEE Transactions on Cybernetics,
46(3):641–654.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the IEEE Inter-
national Conference on Computer Vision, volume 2,
pages 1150–1157.
Moosbauer, S., Konig, D., Jakel, J., and Teutsch, M. (2019).
A benchmark for deep learning based object detec-
tion in maritime environments. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops.
Onunka, C. and Bright, G. (2010). Autonomous marine
craft navigation: On the study of radar obstacle detec-
tion. In International Conference on Control Automa-
tion Robotics & Vision, pages 567–572.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. Advances in Neural Information
Processing Systems, 28.
Ruiz, A. R. J. and Granja, F. S. (2009). A short-range ship
navigation system based on ladar imaging and target
tracking for improved safety and efficiency. IEEE
Transactions on Intelligent Transportation Systems,
10(1):186–197.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Steccanella, L., Bloisi, D. D., Castellini, A., and Farinelli,
A. (2020). Waterline and obstacle detection in im-
ages from low-cost autonomous boats for environ-
mental monitoring. Robotics and Autonomous Sys-
tems, 124:103346.
S
¨
underhauf, N., Shirazi, S., Jacobson, A., Dayoub, F., Pep-
perell, E., Upcroft, B., and Milford, M. (2015). Place
recognition with convnet landmarks: Viewpoint-
robust, condition-robust, training-free. Robotics: Sci-
ence and Systems, pages 1–10.
Tolias, G., Sicre, R., and J
´
egou, H. (2015). Particular ob-
ject retrieval with integral max-pooling of CNN acti-
vations. arXiv preprint arXiv:1511.05879.
Uijlings, J. R. R., Van De Sande, K. E. A., Gevers, T., and
Smeulders, A. W. M. (2013). Selective search for ob-
ject recognition. International Journal of Computer
Vision, 104:154–171.
Vo, H. V., P
´
erez, P., and Ponce, J. (2020). Toward unsu-
pervised, multi-object discovery in large-scale image
collections. In Proceedings of the European Confer-
ence on Computer Vision, pages 779–795.
Xue, J., Chen, Z., Papadimitriou, E., Wu, C., and
Van Gelder, P. H. A. J. M. (2019a). Influence of envi-
ronmental factors on human-like decision-making for
intelligent ship. Ocean Engineering, 186:106060.
Xue, J., Wu, C., Chen, Z., Van Gelder, P. H. A. J. M.,
and Yan, X. (2019b). Modeling human-like decision-
making for inbound smart ships based on fuzzy
decision trees. Expert Systems with Applications,
115:172–188.
Yan, X., Ma, F., Liu, J., and Wang, X. (2019). Applying the
navigation brain system to inland ferries. In Proceed-
ings of the Conference on Computer and IT Applica-
tions in the Maritime Industries, pages 25–27.
Zhang, X., Wang, C., Jiang, L., An, L., and Yang, R. (2021).
Collision-avoidance navigation systems for maritime
autonomous surface ships: A state of the art survey.
Ocean Engineering, 235:109380.
Zhou, B., Lapedriza, A., Xiao, J., Torralba, A., and Oliva,
A. (2014). Learning deep features for scene recogni-
tion using places database. Advances in Neural Infor-
mation Processing Systems, 27.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
770
