
Automatic Error Correction of GPT-Based Robot Motion Generation
by Partial Affordance of Tool
Takahiro Suzuki, Yuta Ando and Manabu Hashimoto
Graduate School of Engineering, Chukyo University, Aichi, Japan
Keywords:
Robot Motion Generation, Automatic Error Correction, Part Affordance, Functional Consistency, Robot
Motion Template, GPT.
Abstract:
In this research, we proposed a technique that, given a simple instruction such as ”Please make a cup of
coffee” as would commonly be used when one human gives another human an instruction, determines an
appropriate robot motion sequence and the tools to be used for that task and generates a motion trajectory
for a robot to execute the task. The proposed method uses a large language model (GPT) to determine robot
motion sequences and tools to be used. However, GPT may select tools that do not exist in the scene or
are not appropriate. To correct this error, our research focuses on function and functional consistency. An
everyday object has a role assigned to each region of that object, such as ”scoop” or ”contain”. There are also
constraints such as the fact that a ladle must have scoop and grasp functions. The proposed method judges
whether the tools in the scene are inconsistent with these constraints, and automatically corrects the tools as
necessary. Experimental results confirmed that the proposed method was able to generate motion sequences a
from simple instruction and that the proposed method automatically corrects errors in GPT outputs.
1 INTRODUCTION
Research targeting the development of life-support
robots is becoming increasingly active in recent years
thanks to major advances in machine learning. The ul-
timate objective of this research is to achieve a robot
that can act appropriately based on simple text such
as ”Please make a cup of coffee” that would naturally
be used to instruct a fellow human being to perform a
certain task.
To this end, a number of image processing tech-
nologies are being developed and steadily approach-
ing a practical level. These include technologies
for recognizing tools such as YOLO(Redmon et al.,
2016) and SSD(Liu et al., 2016) technologies(Xu
et al., 2021; Qin et al., 2020; Ardon et al., 2020; Liang
and Boularias, 2023) for understanding how tools
are used, and technologies for determining grasping
parameters such as Fast Graspability(Domae et al.,
2014) and so on(Song et al., 2020; Zhang et al., 2021).
On the other hand, achieving natural interaction
between humans and robots will require technology
that enables the robot itself to break down a broad task
given by a human and generate a specific sequence
of motions and technology that determines the appro-
priate tool to be used for each motion. These tech-
Please make a
cup of coffee.
GENERATE
GPT
grasp
scoop
contain
1. Put coffee powder
into cup with ladle.
2. Put hot water…
1. Put coffee powder
into cup with spoon.
2. Put hot water…
Robot motion
OPTIMIZE
GPT
Function
Put motion
template
Figure 1: Overview of proposed method. Generate robot
motions from scene information and task-level instruction
given by a human. Determine sequence of motions and
tools to be used by GPT. Additionally, use information on
tool functions and a newly proposed motion template to op-
timize the GPT tools. Finally, create robot motions from
that information.
nologies, however, must be highly versatile in use,
and as a result, they have not been extensively stud-
ied(Yamada et al., 2020; Takata et al., 2022; Inagawa
et al., 2020). These methods require detailed instruc-
tions from a human at the motion level.
314
Suzuki, T., Ando, Y. and Hashimoto, M.
Automatic Error Correction of GPT-Based Robot Motion Generation by Partial Affordance of Tool.
DOI: 10.5220/0012375000003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
314-323
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Here, we take as an example the task of ”mak-
ing coffee.” This task consists of the four subtasks of
(1) put coffee powder into cup, (2) put hot water into
cup, (3) put sugar into cup, and (4) stir. In addition,
subtask (1) ”put coffee powder into cup” can be fur-
ther divided into smaller motions such as (1a) pick a
spoon, (1b) scoop coffee powder from bowl, (1c) put
scooped coffee powder into cup, and (1d) place spoon
down.
Now, on examining the above relationships, it can
be seen that generating specific robot motions from
a simple instruction given by a human would require
that the hierarchical relationship of task → subtask →
motions be understood and that those motions be put
into the correct order.
In addition, subtask (1) ”put coffee powder into
cup” requires that the tools to be used be correctly
determined, as in ”use a spoon” for scooping and use
a ”cup” for containing the scooped coffee powder.
Based on the above, this research proposes a
method for generating a specific motion trajectory for
a robot from a task-level instruction given by a hu-
man by appropriately determining the robot’s motion
sequence for executing that task and the tools to be
used.
The main flow of this method is shown in Figure1.
Here, to determine a motion sequence at the subtask
level from an instruction given by a human and to de-
termine the tools to be used, we use Generative Pre-
trained Transformer (GPT), a large language model
having wide applicability to the content of many fields
that has been extensively researched in recent years
(GENERATE GPT).
However, since GPT outputs the motion sequence
and used tools as a character string, that in itself can-
not generate robot motions. We therefore propose a
motion template to connect motions (character string)
at the subtask level with actual robot motions.
In addition, GPT currently under development
cannot necessarily determine the appropriate tools to
be used. For example, for the motion of ”put coffee
powder,” GPT may actually propose that the coffee be
scooped into a natsume (a small lacquered container
used in a Japanese tea ceremony) or poured into a
bowl. GPT may also propose tools that do not exist in
the scene. To solve this problem, we use functionality
obtained from the results of sensing a scene, where
”function” refers to the role of each part of a tool.
Specifically, the method judges whether the tools to
be used as determined by GPT are functionally con-
sistent, and if they are not, determines the optimal
tools from other tools (OPTIMIZE GPT).
The contributions of this research are as follows.
• Achieved the ability of generating an actual mo-
tion trajectory for a robot from a simple task-level
instruction.
• Proposed a motion template for connecting the in-
struction given by a human with the robot’s mo-
tion trajectory and used tools.
• Made it possible to set functional constraints on
the tools used in the motion template and to judge
whether the tools set by GPT are appropriate from
a functional perspective.
• Enabled GPT to select optimal tools for the mo-
tions under consideration by searching candidates
for tools based on function.
2 PROBLEM FORMULATION
In this section, we formulate the problem to be solved
by this research and define the assumptions made in
solving that problem. We also explain the basic ideas
behind solving the problem.
2.1 Definition
Given the input of a scene’s RGB image and point
cloud and a task-level instruction such as ”Please
make some hot coffee,” the goal of this research is to
determine an appropriate robot motion sequence for
executing that task and the tools for doing so and to
generate a motion trajectory for a robot hand to ex-
ecute the task. The motion trajectory is defined in
terms of the position and orientation (six degrees of
freedom) of the robot hand in 3D space.
2.2 Assumptions
In this research, the following two assumptions are
made.
• The subtask-level motions that the robot can make
are set beforehand.
• The correspondence between the ingredient con-
tained in a tool and the name of that tool is known.
In the first assumption, the subtask-level motions
that the robot can make such as ”pick,” ”place,”
and ”put” are set beforehand. In other words, the
robot cannot perform any motions other than the ones
specifically set beforehand.
In the second assumption, in the case, for exam-
ple, that coffee powder is contained in a bowl, that
correspondence is set beforehand so that coffee pow-
der comes to mind given a bowl. In this regard, recent
progress in generic object recognition technology has
Automatic Error Correction of GPT-Based Robot Motion Generation by Partial Affordance of Tool
315

made it possible to recognize a bowl and coffee sep-
arately. Nevertheless, to reduce the load associated
with generating teacher data and reduce the number of
classes to be identified, this research recognizes only
tools.
2.3 Ideas Behind Generating Robot
Motions from a Language
Instruction
Generating robot motions from a task-level language
instruction requires that the meaning expressed by the
character string in the language instruction be under-
stood, that the tools to be used and the motion se-
quence be determined from that meaning, and that the
motion trajectory of the robot hand in 3D space be
generated. Here, to understand all sorts of language
instructions and determine the motion sequence and
tools to be used, we use GPT, a large language model,
the research of which has been making remarkable
progress in recent years. Specifically, this means in-
putting the language instruction and information on
the objects in the target scene into GPT to determine
the motion sequence that enumerates the motions at
the subtask level and the tools to be used.
However, actual robot motions cannot be gener-
ated simply on the basis of enumerating the motion
sequence and tools to be used. We therefore propose
the concept of a motion template to connect subtask-
level motions and actual motions. This is the first idea
characterizing this research. Details are described
in section 3.3, but the role of a motion template is
to assign a correspondence between the name of the
subtask-level motion and the motion trajectory, the
motion-source/motion-target tools, and the tool used
for that motion.
The second novel idea of this research is to deter-
mine whether the tools determined by GPT are appro-
priate based on information on the functions. Here,
”function” is the role played by each tool, as de-
scribed in detail in section 3.3. In this research, our
method determines whether a tool determined by GPT
is appropriate from the perspective of information on
tool functionality, and if inappropriate, feeds back that
information to GPT to determine another tool.
The third novel idea of this research is to enumer-
ate tools considered to be good candidates from the
perspective of information on tool functionality in ad-
dition to the tool determined by GPT and to then have
GPT select the most optimal tool from those tools.
Assuming, for example, that ”ladle” has been selected
as the tool for scooping up coffee powder. In this
case, since a ladle possesses a ”scoop” function, it can
scoop up something, but on the other hand, it is not
generally used as a tool for scooping up coffee pow-
der. The method therefore searches for all tools hav-
ing a scoop function (such as spoon and ladle) from
the input scene and feeds back search results to GPT.
GPT then judges whether a ladle is the most optimal
tool for scooping up coffee powder from among the
tools returned from the search, and if not, selects the
most optimal tool from other candidates.
3 METHOD
In this section, we describe our method for generating
robot motion from a language instruction.
3.1 Overview
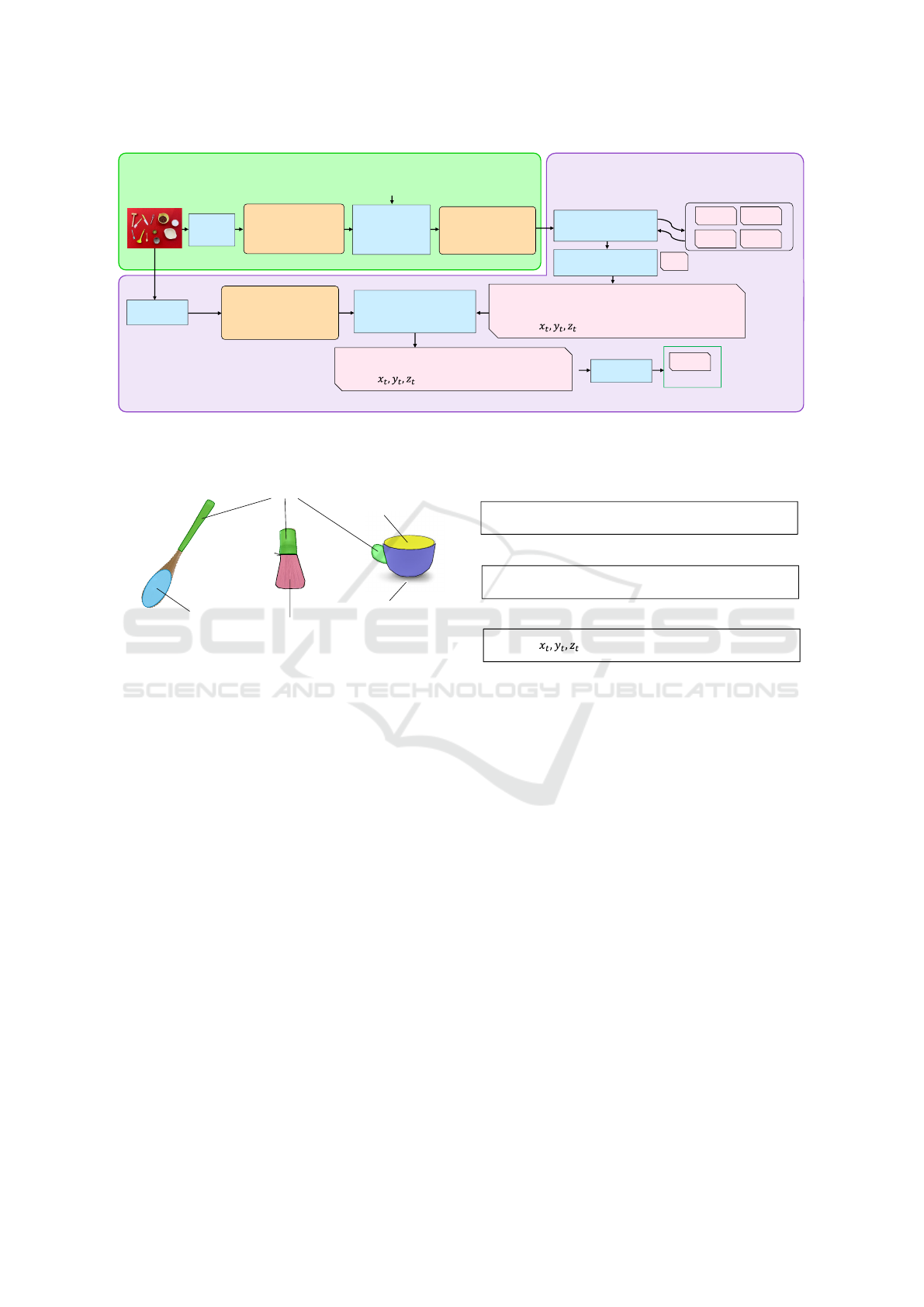
The flow of the proposed method is shown in Figure2.
This method consists of two modules. The first mod-
ule determines a subtask-level motion sequence and
used tools from the input RGB image of a scene and
a task-level language instruction. The second module
determines whether the determined tools are optimal,
and generates a motion trajectory for the robot hand.
3.2 Determining Motion Sequence and
Tools
The green frame in Figure2 outlines this module,
which determines a subtask-level motion sequence
and the tools to be used at that time from a scene’s
RGB image and a task-level language instruction.
This module begins by recognizing the names of
the tools present in the scene using a generic object
recognition method like YOLO(Redmon et al., 2016).
Since it is assumed here that a correspondence be-
tween objects and ingredients is already known, in-
gredients present in the scene can also be recognized.
Next, the module inputs scene information, a task-
level language instruction like ”make hot coffee,” and
the types of subtask-level motions that the robot can
perform (put, stir, etc.) into GPT. It also submits to
GPT a query requesting ”a motion sequence for exe-
cuting that task using available motions and a list of
tools to be used at that time” and outputs a motion
sequence and used tools.
3.3 Correct Tools and Generate Motion
Trajectory
This module, shown by the purple frame in Figure2,
determines whether the determined tools are optimal
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
316
Determine motion sequence and tools
Put
Input 2 : Instruction
“Make a cup of coffee.”
Motion template DB
Put
Cut
Check functional consistency
Optimize tool
(GPT)
…
Output : motion
trajectory group
Put
Function information
Put
Put ( )
coffee
powder
cup
spoon
bowl (contain coffee
powder), spoon, whisk,
cup, ladle…
Scene information
Generate motion
sequence
Determine tools
(GPT)
Scene
analysis
Set ingredients and
tools
Input 1 :
RGB-D
Function
recognition
Matching of verb and
motion template
bowl (contain, wrap-grasp)
spoon (scoop, grasp, stir)
cup (contain, wrap-grasp)
ladle (scoop, grasp)
Combine
trajectories
verb sourcetrajectory
use tooltarget tool
1. Put coffee powder
into bowl with ladle
2. Put hot water ・・・
Correct used tools and generate motion trajectory
Pound
Paint
Put
( )
coffee
powder
bowl
ladle
contain grasp, scoop
ー
ー
verb sourcetrajectory
use tooltarget tool
Functional
constraint
component
example
Motion sequence
Figure 2: Flow of proposed method. Input RGB-D data and task-level instruction, output motion trajectory group. This
method consists of a module for generating a motion sequence and tools to be used from input data (green frame) and a
module that corrects those tools and generates a group of motion trajectories (purple frame).
grasp
scoop, stir
contain
wrap-grasp
stir
Figure 3: Tool-function information. Each part of a tool has
a specific role. In the case of a spoon, the handle has the
role of being grasped by a human or robot (grasp function)
and the concave part has the role of scooping up something
(scoop function) and the role of stirring (stir function).
using a motion template, and generates a motion tra-
jectory for the robot hand. We first explain the tool-
function information and motion templates that are
used here and then describe the method for correct-
ing tools and generating a motion trajectory for the
robot hand using the above.
3.3.1 Tool-Function Information
Everyday objects (tools) such as spoons and cup have
roles like ”scoop” and ”contain” assigned to each of
their parts. Such a role is called a function or af-
fordance, which is a concept proposed by Myer et
al(Myers et al., 2015). Figure3 shows the functions
assigned to a spoon and cup.
A designer who creates an everyday object envi-
sions the motion used for that item and reflects func-
tionality in that item. For example, a whisk is created
envisioning a motion that stirs some kind of liquid. In
other words, a human grasps the whisk in the domain
of the grasp function and stirs the liquid in the domain
of the stir function, which shows that function and
put
verb
contain
grasp, scoop
sourcetrajectory use tooltarget tool
put
coffee-
powder
spooncup( )
ー ー
(a) Overview of a motion template
(b) Constraints set in a motion template (Example of put)
(c) Example of tools and ingredient set in a motion template (put)
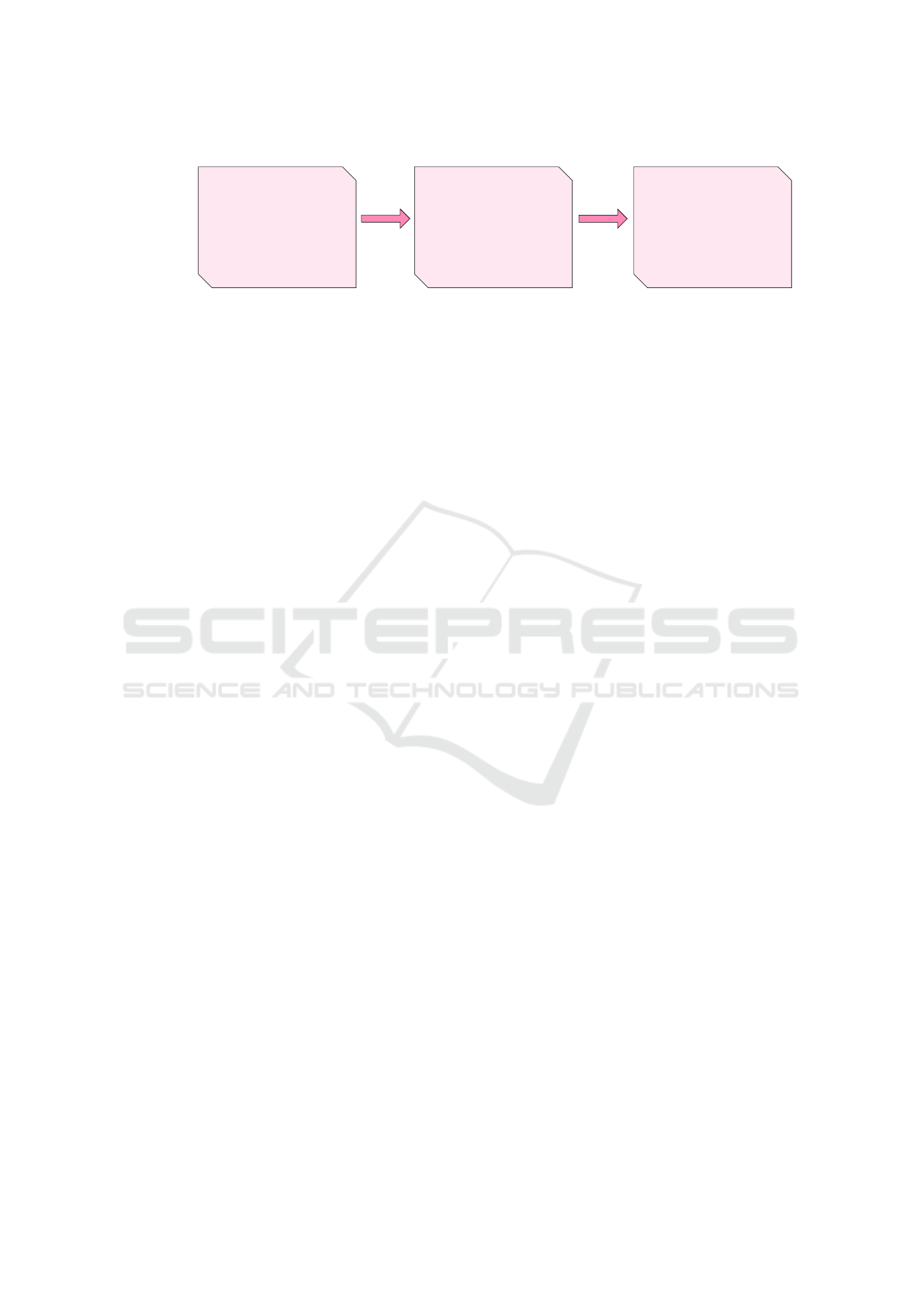
Figure 4: Proposed motion templates. A motion template
consists of a verb, motion trajectory, motion source, tool tar-
geted by motion, and used tool (a). Functional constraints
are set on tools (b).
motion are highly related. A spoon, meanwhile, must
have scoop, stir and grasp functions, which reflects
the close relationship between tool and function. To
enable robots to use tools, a number of methods for
recognizing the affordances of everyday objects are
being researched(Do et al., 2018; Minh et al., 2020).
3.3.2 Motion Templates
Figure4 shows an overview of the proposed motion
template. A motion template associates the name of a
motion and a motion trajectory. This motion template
has been proposed by Tsusaka et al(Tsusaka et al.,
2012). Applying this method, for example, to the
”put” motion of scooping up something and pouring
it into another tool, if the domain of the scoop func-
tion is given a certain movement, the motion can be
successfully executed regardless of the size or shape
of the tool. In addition, tool-function information
can be used here to determine the point at which the
robot should grasp that tool. In other words, given
Automatic Error Correction of GPT-Based Robot Motion Generation by Partial Affordance of Tool
317
“Put” motion template
bowl brush
contain grasp, scoop
used tooltarget tool
Functional
constraint
Determined
tool name
Functional
consistency
OK
Bowl included
contain
Not OK
Brush does not
include
Modify
(GPT)
bowl ladle
contain grasp, scoop
used tooltarget tool
OK
Bowl included
contain
OK
Ladle included
grasp, scoop
cup spoon
contain grasp, scoop
used tooltarget tool
OK
Bowl included
contain
OK
Ladle included
grasp, scoop
Optimize
(GPT)
Figure 5: Modification of tools used in a motion template. Shown here is an example of a “put” motion targeting coffee
powder for the case of a cup, spoon, ladle, etc. present as other tools. Since a brush has no scoop function and lacks functional
consistency as a result, GPT changes this to a tool having a scoop function (indicated by Modify in the figure). Finally, GPT
selects an optimal tool from among tools having the same function (Optimize).
the movement of the scoop function, the movement
of the grasp point for producing that movement (i.e.,
the motion trajectory of the robot hand) can be gener-
ated.
However, an actual ”put” motion cannot be
achieved solely on the basis of that information. Also
needed is information on what is to be scooped, where
it should be poured, and what tool should be used to
do the scooping. For this reason, we add to the mo-
tion template the components ”source” (the target of
scooping in the case of a put motion), ”target tool”
(the destination of pouring the target of scooping in
the case of a put motion), and ”used tool” (the tool
used when executing the motion). We propose a novel
motion template with these additional terms. Then,
once an appropriate ingredient or tool has been set for
each of those items, the motion becomes possible.
In addition to the above, the tools set in ”target
tool” and ”used tool” must satisfy functional con-
straints. For a ”put” motion, the ”target tool” must
be able to contain something. In short, a tool hav-
ing a contain function must be set here. The ”used
tool,” meanwhile, must have a grasp function so that
the robot can grasp the tool and a scoop function for
scooping up something. In this way, the tools set in
”target tool” and ”used tool” must have specific func-
tions. This is a condition that differs for each type of
motion, so the functions that ”target tool” and ”used
tool” must have can be set beforehand for each type
of motion template.
3.3.3 Generation of Robot Motion Using
Tool-Function Information and Motion
Template
The purple frame in Figure2 shows an overview of
this module. This module optimizes the tools to be
used based on the character string output by the pre-
vious processing step expressing a motion sequence
and the tools to be used as well as on tool-function
information. It also outputs a motion trajectory that
the robot can perform.
The tool-function recognition process removes the
plane surface of the desk, eliminates noise, etc. with
respect to the scene’s point cloud data and extracts
a point cloud for each tool. Here, we use Point-
Net++(Qi et al., 2017) for this model. This process-
ing creates a database that associates tool names and
functions.
In motion template matching, the process extracts
a verb from character string and selects a motion tem-
plate corresponding to that verb. Furthermore, as de-
scribed in section 2.2, essential subtask-level motions
are set beforehand in the motion template database.
Ingredient and tools corresponding to source, target
tool, and used tool are also extracted from the charac-
ter string. Here, for the ”put” motion, the process out-
puts a character string in the form ”Put [source name]
into [target tool name] with [used tool name] by GPT
for generating a motion sequence and determining the
tools to be used.
To check the functional consistency of tools, this
module judges whether the tools set in target tool and
used tool are functionally correct as shown by the
Modify section in Figure5. As described in section
3.3.2, the tools set in target tool and used tool must
each have a specific function, which differs for each
type of motion. The module judges whether a set tool
has this function using a function database. For ex-
ample, let’s assume that GPT determines that a brush
is to be used for the put motion as shown in Figure5.
A brush, however, has no scoop function and is there-
fore not functionally consistent. In such a case, names
of tools having that function will be extracted from
the function database and fed back to GPT to extract
an appropriate tool from those names. At this time,
GPT selects an optimal tool from the tools presented.
This process is repeated until a functionally appropri-
ate tool is set.
In tool optimization, the module judges whether
the tools set in target tool and used tool are optimal
tools as shown by the Optimize section in Figure5.
For the case of ”put coffee powder,” for example, the
put motion template is used. The functions that the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
318

Table 1: Motion templates used in the experiment and func-
tional constraints of the tools.
Motion Target tool Use tool
Put Contain Grasp, Scoop
Stir Contain Grasp, Stir
Paint - Grasp, Paint
Pound Contain Grasp, Pound
Cut Contain Grasp, Cut
used tool should have in this template are the grasp
function and scoop function. As a result, either ”la-
dle” or ”spoon” is acceptable for the used tool. How-
ever, ”spoon” is generally used. In this way, whenever
there are multiple tools in the scene having the same
function as the functional constraint set in the motion
template, the names of those tools are fed back to GPT
to extract from those names an optimal tool. That is,
GPT selects an optimal tool to be used at the time of
that motion from the presented tools.
At this point in time, the ingredient and tool names
corresponding to source, target tool, and used tool are
known, so the trajectories of the motion template will
be transformed using information on the locations of
that ingredient and tools and added to the motion tra-
jectory group. This series of processes is performed
only for each character string showing the motion se-
quence and used tools output by the previous process-
ing step. Finally, these motion trajectories are com-
bined according to the motion sequence.
4 EVALUATION EXPERIMENTS
This section describes experiments to evaluate the
proposed method. These consist of an experiment in
determining robot motion sequence and tools to be
used using virtual data, an experiment in determin-
ing robot motion sequence and tools to be used using
tools obtained from an actual scene and tool-function
information, an experiment in correcting used tools
from an intentionally incorrect recipe, and an experi-
ment in generating motion using an actual robot.
4.1 Determining Robot Motion
Sequence and Used Tools Using
Virtual Data
4.1.1 Setup
This experiment was performed to evaluate whether a
robot motion sequence and used tools could be cor-
rectly determined by the proposed technique.
The scene used here is assumed to include spoon,
natsume, chawan, whisk, chagama, ladle, bowl, ham-
mer, knife, rice scoop, pot and cutting board as tools
and matcha powder, hot water, water, curry powder,
rice, salt coffee powder, sugar, pineapple and choco-
late bar as ingredients. In addition, used functions
are cut, contain, scoop, grasp, wrap-grasp, stir, pound,
and paint. This experiment uses virtual data, so it is
assumed that the functions, tools, etc. have been cor-
rectly recognized from the scene. The motion tem-
plates used here are shown in Table 1 and the tasks
given by a human are ”Make hot matcha,” ”Make hot
coffee,” ”Make curry rice,” ”Make pineapple juice,”
and ”Make liquid chocolate.” GPT-4, GPT-3.5 Turbo
was used as a GPT engine.
In the experiment, the proposed technique was
used to determine a robot motion sequence and used
tools from tool and ingredient information in the
scene and from an instruction given by a human. Ten
trials were performed for each task. Here, a human
judged and evaluated whether the technique could de-
termine a motion sequence and used tools that could
successfully execute the task given by a human.
4.1.2 Experimental Result
The results in Table2 confirm that the proposed
method can be used to correct the tool to be used.
For the task of making hot coffee, GPT selected a
suboptimal tool. As an example, whisk was selected
when stirring coffee powder. However, the proposed
method corrected it into a spoon with the same func-
tionality. For the task of making curry rice, GPT gen-
erated a sequence that made it impossible to make
curry. For example, a recipe was generated in which
curry powder and water are put in a pot and rice is put
in a bowl. In addition, a suboptimal tool was selected
four times. With the proposed method, these were
corrected into optimal tools. However, it was not pos-
sible to correct the recipe to make curry. This is be-
cause GPT optimizes the tools for each sequence. In
other words, GPT does not consider the relationship
between successive sequences. In actual cooking, the
tools to be used must be determined while also tak-
ing into consideration the sequences that come before
and after. Therefore, to solve this error, we need a
system that optimizes the tools while also consider-
ing the content of successive sequences.
Figure6 shows the communication between the
system and GPT in text form. These sentences are
generated automatically. GPT and the system can in-
teract with each other to ensure that they correct any
errors to achieve the optimal tool for the task.
Automatic Error Correction of GPT-Based Robot Motion Generation by Partial Affordance of Tool
319
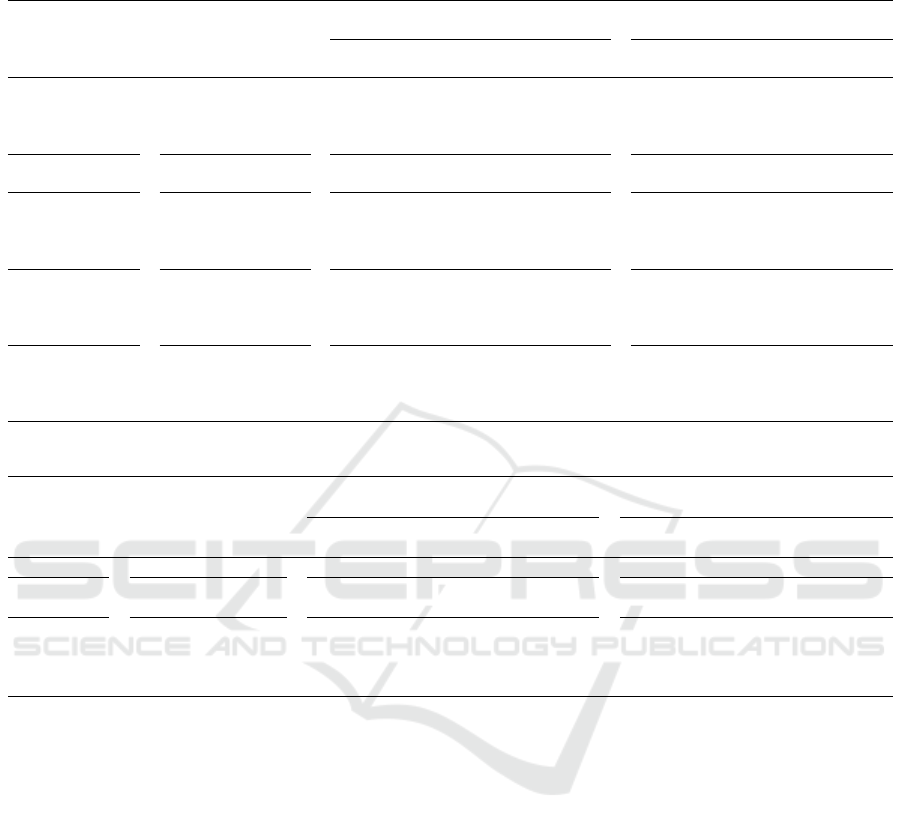
Table 2: Errors in the selection of tools to be used by GPT and their correction by the proposed method.GPT may not be able
to select the optimal tool to be used.With the proposed method, these are corrected into optimal tools.
Product
Number of
successful tools
determined by GPT
Erroneously determined tools by GPT
Correction
by proposed method
Number of times Example
Number of
successes
Example
Hot matcha 7 3
1. Impossible
to make it: 2
2. Selecting
suboptimal tools: 1
1
Successfully corrected
error No.2
Hot coffee 9 1
1. Selecting
suboptimal tools: 1
1
Successfully corrected
all error
Curry rice 5 5
1. Impossible
to make it: 1
2. Selecting
suboptimal tools: 4
4
Successfully corrected
error No.2
pineapple juice 2 8
1. Impossible
to make it: 2
2. Selecting
suboptimal tools: 6
6
Successfully corrected
error No.2
Liquid chocolate 3 7
1. Impossible
to make it: 2
2. Selecting
suboptimal tools: 5
5
Successfully corrected
error No.2
Table 3: Experimental result using actual scenes.
Product
Number of
successful tools
determined by GPT
Erroneously determined tools by GPT
Correction
by proposed method
Number of times Example
Number of
successes
Example
Hot matcha 10 0 - - -
Hot coffee 7 3
1. Selecting
suboptimal tools: 3
3
Successfully corrected
all errors
Curry rice 3 7
1. Impossible
to make curry: 3
2. Selecting
suboptimal tools: 4
4
Successfully corrected
error No.2
4.2 Determining Robot Motion
Sequence and Used Tools Using
Obtained from Scene and
Tool-Function Information
4.2.1 Setup
This experiment was performed to evaluate whether
a robot motion sequence and used tools could be
correctly determined using the results of recognizing
tools and their functions from an actual scene.
In the experiment, the Intel RealSense Depth
Camera SR305 was used as a sensor. GPT-4, GPT-3.5
Turbo was used as a GPT engine. The tools used here
were a spoon, hammer, ladle, brush, whisk, chawan
(a Japanese tea bowl), bowl, natsume, chagama (a
tea kettle used in a Japanese tea ceremony), pot, and
dish. The ingredients were water, salt, sugar, coffee
powder, curry powder, and rice (only for the task of
preparing curry) contained in a bowl, matcha pow-
der contained in a natsume, hot water contained in a
bowl, and hot water contained in a chagama (for the
tasks of preparing matcha). These items were ran-
domly placed in the target scene. Recognized func-
tions are cut, contain, scoop, grasp, wrap-grasp, stir,
pound, and paint. The motion templates used here
were the same as those of the experiment in section
4.1. In this experiment, a human gave three tasks:
”Make hot matcha,” ”Make hot coffee,” and ”Make
curry rice.” The experimental procedure consisted of
recognizing tools and functions from the scene’s RGB
image and point cloud and determining the robot mo-
tion sequence and used tools from the above and the
instruction given by the human. Ten trials were per-
formed for each task. A human judged and evalu-
ated whether the method could determine a motion
sequence and used tools that could successfully exe-
cute the task given by the human.
Training for YOLO used in tool recognition tar-
geted the tools described above. Training data con-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
320

GPT: 1. Put chocolate bar into bowl with spoon.
GPT: 2. Put hot water into pot with ladle.
GPT: 3. Stir chocolate bar in bowl with spoon.
GPT: 4. Pound chocolate bar in bowl with hammer.
GPT initially generated motion sequences and tools
INPUT: Pound chocolate bar in bowl with hammer.
SYSTEM: Functional consistency of target tool -> OK (Bowl includes contain function)
SYSTEM: Consistency of used tool -> OK (Hammer includes pound, grasp functions)
SYSTEM: You have selected the bowl. Is it the best selection?
SYSTEM: Other tools with the same functionality are chawan, natsume and bowl.
GPT: Bowl.
OUTPUT: Pound chocolate bar in bowl with hammer.
INPUT: Put chocolate bar into bowl with spoon.
SYSTEM: Functional consistency of target tool -> OK (Bowl includes contain function)
SYSTEM: Consistency of used tool -> OK (Spoon includes scoop, grasp functions)
SYSTEM: You have selected the Bowl. Is it the best selection?
SYSTEM: Other tools with the same functionality are chawan, natsume, and bowl.
GPT: The best tool to put the chocolate bar into is a bowl.
SYSTEM: You have selected the spoon. Is it the best selection?
SYSTEM: Other tools with the same functionality are spoon and ladle.
GPT: A ladle is generally used to put liquid chocolate into a bowl.
OUTPUT: Put chocolate bar into bowl with ladle.
Check consistency and result of correcting tools (sequence 1)
・・・ Consistency : OK, correcting required
Check consistency and result of correcting tools (sequence 4)
・・・ Consistency : OK, correcting not required
1. Put chocolate-board into bowl with ladle.
2. Put hot-water into pot with ladle.
3. Stir chocolate-board in bowl with spoon.
4. Pound chocolate-board in bowl with hammer.
Final output
Figure 6: Experimental result using virtual data. Only se-
quence 1 and 4 are described in the communication. This is
the communication in text form.These sentences are gener-
ated automatically.The motion sequence and tools initially
generated by GPT are not optimal.In sequence 1, it is not
appropriate to use a spoon, but we can see that it is cor-
rected to ladle by the proposed method.
sisted of 8892 images with those objects randomly
placed and annotations indicating the corresponding
positions and types of those objects. Additionally, in
the training for PointNet++ used in function recogni-
tion, actual objects were scanned using a 3D scanner
to create 3D models. A human then added annota-
tions indicating tool function to those models. Fi-
nally, 2.5D data observed from multiple viewpoints
were created from these 3D models. Here, 745 pairs
of this training data and teacher data were created and
used for training purposes.
4.2.2 Experimental Result
Experiment results are shown in Table3. The view of
this table is the same as Table2.
The results in Table3 confirm that the proposed
method can be used to correct the tool to be used. The
same trend as in section 4.1.2 was observed when ac-
tual scenes were used. The proposed method was par-
ticularly effective in the task of “make hot coffee.” We
confirmed that object recognition and function recog-
nition were highly accurate in all scenes. Therefore,
the tool should be determined while considering the
sequence before and after.
GPT: 1. Put matcha powder into brush.
GPT: 2. Put hot water into brush with brush.
GPT: 3. Stir matcha powder in chagama with ladle.
GPT initially generated motion sequences and tools (intentionally incorrect)
INPUT: Put matcha powder into brush.
SYSTEM: Functional consistency of target tool -> NG (Brush does not include
contain function)
SYSTEM: Consistency of used tool -> NG (No tool that includes scoop, grasp functions)
SYSTEM: Which tool should you put matcha powder into?
GPT: Chawan.
SYSTEM: What tool is generally used to put matcha powder into a chawan?
GPT: The tool commonly used to put matcha powder into a chawan is a spoon.
SYSTEM: Functional consistency of target tool -> OK (Chawan includes contain function)
SYSTEM: Consistency of used tool -> OK (Spoon includes scoop, grasp functions)
SYSTEM: You have selected the chawan. Is it the best selection?
SYSTEM: Other tools with the same functionality are chawan, natsume and bowl.
GPT: The best tool to put matcha powder into is the chawan.
SYSTEM: You have selected the spoon. Is it the best selection?
SYSTEM: Other tools with the same functionality are spoon and ladle.
GPT: A spoon is generally used to put matcha powder into a chawan.
OUTPUT: Put matcha powder into chawan with spoon.
Check consistency and result of correcting tools (sequence 1)
1. Put matcha powder into chawan with spoon.
2. Put hot water into chawan with ladle.
3. Stir matcha powder in chawan with whisk.
Final output
INPUT: Put hot water into brush with brush.
SYSTEM: Functional consistency of target tool -> NG (Brush does not include
contain function)
SYSTEM: Consistency of used tool -> NG (Brush does not include scoop, grasp functions)
SYSTEM: Which tool should you put hot water into?
GPT: Bowl.
SYSTEM: What tool is generally used to put matcha powder into bowl?
GPT: Ladle.
SYSTEM: Functional consistency of target tool -> OK (Bowl includes contain function)
SYSTEM: Consistency of used tool -> OK (Ladle includes scoop, grasp functions)
SYSTEM: You have selected the bowl. Is it the best selection?
SYSTEM: Other tools with the same functionality are chawan, natsume and bowl.
GPT: The best tool to stir matcha powder into is the chawan.
SYSTEM: You have selected the ladle. Is it the best selection?
SYSTEM: Other tools with the same functionality are spoon and ladle.
GPT: A ladle is generally used to put water into a chawan.
OUTPUT: Put hot water into chawan with ladle.
Check consistency and result of correcting tools (sequence 2)
Figure 7: Communication between the system and GPT.
The motion sequences and tools are intentionally generated
incorrectly. Only sequence 1 and 2 are described in the
communication. In sequence 2, tools that do not lack func-
tional consistency are selected after which the best tool is
finally selected.
4.3 Correction of Used Tools from an
Intentionally Incorrect Recipe
4.3.1 Setup
For the case that GPT makes a mistake in tools to be
used, this experiment was performed to test whether
those tools could be corrected using tool-function in-
formation and GPT.
Experimental conditions were the same as those in
section 4.2. Here, instead of a mistake made by GPT,
used tools incorrectly stated by a human (e.g., ”Put
coffee powder into a ladle with a brush.”) were speci-
fied and the proposed method attempted to correct the
used tools. Ten trials were performed for each task.
A human judged and evaluated whether the method
could determine used tools that could successfully ex-
ecute the task given by a human.
4.3.2 Experimental Result
The experimental result showed that the tools used
were successfully corrected 8 out of 10 times. Figure7
shows the actual communication in which the tools
to be used are corrected. In this experiment, humans
Automatic Error Correction of GPT-Based Robot Motion Generation by Partial Affordance of Tool
321

intentionally specify the incorrect tool to use. In Se-
quence1, the tool is judged to lack functional consis-
tency. A chawan and a spoon were selected as alter-
native tools, and they were judged to be optimal com-
pared to the other tools. Sequence2 is also determined
to lack functional consistency. A bowl and ladle were
then selected as alternative tools. In the optimization,
a chawan was determined to be optimal compared to
the bowls.
One of the reasons for this failure was the erro-
neous determination of the tools into which the ingre-
dients were put. As mentioned in section 4.1.2, this is
because GPT optimizes the tools for each sequence.
4.4 Correction of Used Tools from an
Intentionally Incorrect Recipe
4.4.1 Setup
This experiment was performed to evaluate whether
an actual robot could move according to an instruc-
tion given by a human using the robot motion trajec-
tory determined by the proposed method. In the ex-
periment, the Intel SR305 was used as a sensor and
Torobo from Tokyo Robotics Inc. was used as the
robot. GPT-4, GPT-3.5 Turbo was used as a GPT en-
gine. The tools used here were bowl, whisk, spat-
ula, brush, hammer, chawan, ladle, and spoon, and
the ingredients were coffee powder, curry powder, hot
water, water, sugar, and salt contained in a bowl and
matcha powder contained in a natsume. These items
were randomly placed in the target scene. The rec-
ognized functions were the same as those used up to
now. The motion templates were the same as those
of the experiment in section 4.1. The task given by
the human was ”Make hot matcha.” The experimen-
tal procedure consisted of recognizing tools and func-
tions from the scene’s RGB image and point cloud
and determining the robot motion sequence and used
tools from the above and the instruction given by the
human. A motion trajectory was generated and ac-
tual robot motion was performed. Ten trials were per-
formed. A human judged and evaluated whether the
task given by the human could be successfully exe-
cuted.
Training conditions for YOLO and PointNet++
were the same as those in section 4.2.
4.4.2 Experimental Result
In the experiment, the robot succeeded in making hot
matcha 8 out of 10 times. Figure8 shows the robot in
actual operation.
The proposed method successfully determined the
motion sequences and tools used 10 out of 10 times.
(1) Put hot water
(scoop)
(2) Put hot water
(pour)
(3) Put matcha powder
(scoop)
(4) Put matcha powder
(pour)
(5) Stir hot water
(pick)
(6) Stir hot water
(stir)
Figure 8: Robot operating state. There are a snapshots of
some of the robot’s movements. For easy visualization,
brown beads are used instead of hot water. The robot is
making hot matcha based on the motion sequences and the
tools to be used generated by the proposed method.
However, two errors occurred when generating robot
paths. This is because the robot’s range of motion is
small and the robot collides with other objects. There-
fore, the motion range of the robot must also be con-
sidered when determining the motion trajectory in the
motion template. It is also effective to consider the
range of motion and modify the trajectory to a motion
trajectory suitable for the robot.
5 CONCLUSIONS
In this research, we proposed a method that, given
a simple instruction such as ”Please make a cup of
coffee” as would commonly be used when one hu-
man gives another human an instruction, determines
an appropriate robot motion sequence and the tools to
be used for that task and generates a motion trajectory
for a robot to execute the task.
The proposed method uses GPT to determine the
robot’s motion sequence and tools to be used from a
given instruction. In addition, we proposed a method
that judges whether the tools determined by GPT are
optimal based on the consistency of tool-function in-
formation and that provides feedback for selecting
other tools if not optimal.
The experimental results confirm that the pro-
posed method can be used to correct the tool to be
used. However, GPT generated a sequence that made
it impossible to make product. An example of a task
to make curry, a recipe was generated in which curry
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
322

powder and water are put in a pot and rice is put in
a bowl. Therefore, to solve this error, we need a sys-
tem that optimizes the tools while also considering the
content of successive sequences.
In future work, we propose a method for optimiz-
ing the motion sequence for performing the task, and
correcting the tools to be used to take into account the
motion sequence before and after.
ACKNOWLEDGEMENTS
This paper is based on results obtained from a
project, JPNP20006, commissioned by the New En-
ergy and Industrial Technology Development Organi-
zation (NEDO).
REFERENCES
Ardon, P., Pairet, E., Petrick, R., Ramamoorthy, S., and Lo-
han, K. (2020). Self-assessment of grasp affordance
transfer. In Proceedings of IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 9385–9392.
Do, T., Nguyen, A., and Reid, I. (2018). Affordancenet:
An end-to-end deep learning approach for object af-
fordance detection. In Proceedings of IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 5882–5889.
Domae, Y., Okuda, H., Taguchi, Y., Sumi, K., and Hi-
rai, T. (2014). Fast graspability evaluation on sin-
gle depth maps for bin picking with general grippers.
In Proceedings of IEEE International Conference on
Robotics and Automation (ICRA), pages 1997–2004.
Inagawa, M., Takei, T., and Imanishi, E. (2020). Japanese
recipe interpretation for motion process generation of
cooking robot. In Proceedings of IEEE/SICE Interna-
tional Symposium on System Integration (SII).
Liang, J. and Boularias, A. (2023). Learning category-level
manipulation tasks from point clouds with dynamic
graph cnns. In Proceedings of IEEE International
Conference on Robotics and Automation (ICRA)),
pages 1807–1813.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C., and Berg, A. (2016). Ssd: Single shot multibox
detector. In Proceedings of European conference on
computer vision (ECCV), pages 21–37.
Minh, C., Gilani, S., Islam, S., and Suter, D. (2020). Learn-
ing affordance segmentation: An investigative study.
In Proceedings of International Conference on Dig-
ital Image Computing: Techniques and Applications
(DICTA), pages 2870–2877.
Myers, A., Teo, C., Ferm
¨
uller, C., and Aloimonos, Y.
(2015). Affordance detection of tool parts from
geometric features. In Proceedings of IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1374–1381.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Proceedings of Advances in Neu-
ral Information Processing Systems (NIPS).
Qin, Z., Fang, K., Zhu, Y., Fei-Fei, L., and Savarese,
S. (2020). Keto:learning keypoint representations
for tool manipulation. In Proceedings of IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 7278–7285.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once:unified, real-time ob-
ject detection. In Proceedings of the IEEE conference
on computer vision and pattern recognition (CVPR),
pages 779–788.
Song, S., Zeng, A., Lee, J., and Funkhouser, T. (2020).
Grasping in the wild: Learning 6dof closed-loop
grasping from low-cost demonstrations. In IEEE
Robotics and Automation Letters, volume 5, pages
4978–4985.
Takata, K., Kiyokawa, T., Ramirez-Alpizar, I. G., Ya-
manobe, N., Wan, W., and Harada, K. (2022). Effi-
cient task/motion planning for a dual-arm robot from
language instructions and cooking images. In Pro-
ceedings of IEEE/RSJ International Conference on In-
telligent Robots and Systems (IROS), pages 12058–
12065.
Tsusaka, Y., Okazaki, Y., komatsu, M., and Yokokohji, Y.
(2012). Development of in-situ robot motion modifi-
cation method by hand-guiding instruction. In Trans-
actions of the JSME (in Japanese), pages 461–467.
Xu, R., Chu, F.-J., Tang, C., Liu, W., and Vela, P. (2021).
An affordance keypoint detection network for robot
manipulation. In IEEE Robotics and Automation Let-
ters, volume 6, pages 2870–2877.
Yamada, T., Murata, S., Arie, H., and Ogata, T. (2020). Rep-
resentation learning of logic words by an rnn: from
word sequences to robot actions. In Frontiers in neu-
rorobotics, volume 11.
Zhang, X., Koyama, K., Domae, Y., Wan, W., and Harada,
K. (2021). A topological solution of entanglement
for complex-shaped parts in robotic bin-picking. In
Proceedings of IEEE International Conference on
Automation Science and Engineering (CASE), pages
461–467.
Automatic Error Correction of GPT-Based Robot Motion Generation by Partial Affordance of Tool
323
