
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
Igor Vozniak, Pavel Astreika, Philipp M
¨
uller, Nils Lipp, Christian M
¨
uller and Philipp Slusallek
German Research Center for Artificial Intelligence, Stuhlsatzenhausweg 3 (Campus D3 2), Saarbr
¨
ucken, Germany
Keywords:
Voxel Grid, 3D Convolutions, Voxel Grid Representation, High-Definition Voxel Grid, Reconstruction.
Abstract:
Voxel grids are an effective means to represent 3D data, as they accurately preserve spatial relations. However,
the inherent sparseness of voxel grid representations leads to significant memory consumption in deep learning
architectures, in particular for high-resolution (HD) inputs. As a result, current state-of-the-art approaches to
the reconstruction of 3D data tend to avoid voxel grid inputs. In this work, we propose HD-VoxelFlex, a
novel 3D CNN architecture that can be flexibly applied to HD voxel grids with only moderate increase in
training parameters and memory consumption. HD-VoxelFlex introduces three architectural novelties. First,
to improve the models’ generalizability, we introduce a random shuffling layer. Second, to reduce information
loss, we introduce a novel reducing skip connection layer. Third, to improve modelling of local structure that
is crucial for HD inputs, we incorporate a kNN distance mask as input. We combine these novelties with a
“bag of tricks” identified in a comprehensive literature review. Based on these novelties we propose six novel
building blocks for our encoder-decoder HD-VoxelFlex architecture. In evaluations on the ModelNet10/40
and PCN datasets, HD-VoxelFlex outperforms the state-of-the-art in all point cloud reconstruction metrics.
We show that HD-VoxelFlex is able to process high-definition (128
3
, 192
3
) voxel grid inputs at much lower
memory consumption than previous approaches. Furthermore, we show that HD-VoxelFlex, without additional
fine-tuning, demonstrates competitive performance in the classification task, proving its generalization ability.
As such, our results underline the neglected potential of voxel grid input for deep learning architectures.
1 INTRODUCTION
The analysis of 3D data plays an increasingly impor-
tant role in many application areas. In autonomous
driving, LiDAR sensors are commonly employed to
reconstruct, complete and classify the 3D environ-
ment (Zimmer et al., 2022). In medical imaging,
3D data often needs to be classified or segmented
to distinguish between different medical conditions
(Hatamizadeh et al., 2022; Li et al., 2017). Similar
tasks occur in the gaming industry when scanning the
real world to build virtual environments
12
, and clas-
sification of 3D models has the potential to automate
level design
3
. A crucial basis for such tasks are ac-
curate and efficient latent representations of 3D data,
from which 3D data can be re-constructed (Mi et al.,
2022; Boulch and Marlet, 2022; Tatarchenko et al.,
2017), classified (Li et al., 2023; Wang et al., 2017)
or completed (Xiang et al., 2021; Yuan et al., 2018).
One key choice in any method that attempts to build a
1
https://www.flightsimulator.com/
2
https://www.unrealengine.com/en-US/realityscan
3
https://www.scenario.com/
latent representation for 3D data is the input data for-
mat. 3D voxel grids have a uniform structure, similar
to 2D images. They accurately cover populated- as
well as empty spaces, preserve spatial relations, and
are sampling-independent.
Voxel grids are also well aligned with current Li-
DAR sensing technology, as it records the surround-
ings using a pattern based on a 3D grid. Due to
the uniform structure, 3D CNNs can be directly ap-
plied to 3D voxel grids. Despite these advantages, 3D
voxel grids come with two related challenges when
scaling up their resolution in order to represent fine-
grained details. First, expecially at high resolutions
the voxel grids become very sparse, leading to prob-
lems in generalisation, and to information loss in the
network. Second, high-definition voxel grids lead to
prohibitively large memory consumption in common
3D CNN architectures. As a result, recent works have
commonly used low-resolution voxel grids (Wu et al.,
2016; Oleksiienko and Iosifidis, 2021; Wu et al.,
2015) or opted to directly work on point cloud data,
e.g. by employing a graph representation (Phan et al.,
2018; Riegler et al., 2017; Qi et al., 2017a; Qi et al.,
2017b).
204
Vozniak, I., Astreika, P., Müller, P., Lipp, N., Müller, C. and Slusallek, P.
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation.
DOI: 10.5220/0012374800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
204-219
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Figure 1: Top-Left: shows sparseness challenge given voxel
grid input and uneven distribution between full and empty
cells. Bottom-Left: “chair” model (ground truth) is en-
capsulated within a voxel grid of size 128
3
and is repre-
sented with 30,719 occupied cells (∼ 1.5% from the to-
tal number). Top-Right: reconstructed voxel grid through
HD-VoxelFlex. Bottom-Right: reconstructed voxel grid
through (Wu et al., 2015). Note: the number of unoccupied
cells is growing with the increase of the resolution; there-
fore, the sparseness challenge is increasing.
In our work, we propose a novel 3D CNN
encoder-decoder architecture that is able to build
effective representations from high-definition voxel
grid input with only moderate memory consumption.
To address the challenges associated with sparsity in
HD voxel grids, we introduce a set of building blocks
that include three architectural novelties: (1) random
shuffling to enhance the model’s generalization, (2)
skip connection to reduce information loss, (3) we in-
troduce kNN Distance Masks to enhance the accurate
modelling of local structure. In addition to these nov-
elties, we propose to use a combination of space-to-
depth layers and random shuffling to improve gener-
alization and to effectively reduce memory consump-
tion with only negligible effects on overall perfor-
mance. Moreover, we report on utilized literature-
based methods and their role in our training objec-
tives.
The specific contributions of this work are three-
fold. First, we present HD-VoxelFlex, the first 3D
CNN encoder-decoder architecture that can be ap-
plied flexibly to HD voxel grid inputs up to 192
3
with moderate memory consumption. Second, we
conduct comprehensive evaluations against the state-
of-the-art on different tasks: 3D reconstruction and
classification. On ModelNet10/40 (Wu et al., 2015)
and PCN (Yuan et al., 2018) datasets, HD-VoxelFlex
outperforms the state-of-the-art in the reconstruction
task, while it outperforms/reaches competitive per-
formance in classification on ModelNet10. Third,
we perform extensive ablation experiments to high-
light the significance. Additionally, we document the
increase in memory usage compared to state-of-the-
art approaches, illustrating the efficacy of the HD-
VoxelFlex.
2 RELATED WORK
In this work, we focus on the latent 3D data repre-
sentation given the voxel grid inputs since they ac-
curately preserve spatial relations. The reconstruc-
tion and classification tasks reported in this work
provide insights into the effectiveness of the intro-
duced model and show that the model can be ap-
plied broadly. Categorization of 3D neural network
methodologies can be structured according to the type
of input data they utilize.; these are A) the raw data
(direct) point cloud approaches (Ran et al., 2022; Qi
et al., 2017a; Liao et al., 2018); B) Graph Convo-
lutions (Wang et al., 2019; Zhang et al., 2019) ap-
proaches, which incorporate local structure by con-
structing corresponding graphs; C) 2D Convolutions
methods on projections (Mescheder et al., 2019; Rad-
ford et al., 2015); and D) 3D Convolutions on voxel
grids (Schwarz et al., 2022; Liu et al., 2019; Riegler
et al., 2017). In the following, we will review each
type of approach.
Popular direct architectures are PointNet (Qi et al.,
2017a; Achlioptas et al., 2018), which assumes sim-
plified preprocessing. Yet, the proposed pooling oper-
ations result in a high information loss, where the re-
moval of shortcut connections does not work in prac-
tice either because of the utilization of global features
only (He et al., 2016; Ronneberger et al., 2015). An-
other disadvantage is the linear GPU consumption in
regard to the size of input. Therefore, the majority
of works handle PCD with ∼ 2K points unless down-
sampling techniques are applied. Note, the utilized
distance-based losses are fit to sampling (Achlioptas
et al., 2017; Wang et al., 2020) instead of the objective
point PCD.
Another commonly adopted technique is based
on graph convolutions like Dynamic Graph CNN
(DGCNN) (Wang et al., 2019; Valsesia et al., 2018).
It works on raw PCD; however, in addition, it incor-
porates local geometric features to focus on neighbor-
hood details in specified areas through the introduced
Edge Convolution operations. The usage of pooling
layers, however, results in loss of information. More-
over, the creation of graphs consumes more resources
and additional time to process, respectively.
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
205

Convolution on a 2D plane is another well-
researched paradigm. Besides, CNNs are applica-
ble in reconstruction and generative domains(Radford
et al., 2015) since they can follow a symmetric archi-
tecture, thus, resulting in balanced encoder and de-
coder parts. In CNNs, memory consumption depends
on the network depth rather than the input, and it is
sampling insensitive because of 2D images of a fixed
resolution. However, due to applying 2D methods on
3D input, the information loss is the highest among
all reviewed approaches. Indeed, independent of the
viewpoint setup (Su et al., 2015), it is not possible to
universally represent the internal surfaces of the ob-
ject.
The remaining family of approaches reviewed in
this work is 3D convolutions on voxel grids. In ad-
dition to the advantages of 2D CNN, they do not cre-
ate any information loss. In contrast to raw input ap-
proaches, it is sampling insensitive and depends on
the voxel resolution or density, allowing small and
large PCDs to be handled together. The apparent dis-
advantage is the high memory utilization given low-
resolution inputs, an increased number of training pa-
rameters and high sparsity (the uneven ratio of filled
voxels to the total voxels in the grid). It has been con-
firmed through a set of recent works (Wu et al., 2017;
Wu et al., 2018; Zhang et al., 2018a) 3D convolutions
can be applied to resolutions up to 128
3
. However,
this is only possible with shallow architectures and
small batch sizes, which leads to slow training. Thus,
the aim of HD-VoxelFlex is to show effective voxel-
grid processing given various training objectives.
3 METHODOLOGY
Our overall architecture has an encoder-decoder
structure (see 2, inspired by VGG (Simonyan and Zis-
serman, 2014). To address the challenges resulting
from HD voxel grid data, we propose a set of novel
building blocks used in the network. We first discuss
our specific techniques to address the aforementioned
challenges and subsequently explain how they are in-
tegrated into the networks’ building blocks.
3.1 Grouped Convolutions & Random
Shuffling
To reduce the overall number of training parameters,
we employ grouped convolutions (Krizhevsky et al.,
2017). Contrary to full convolutions (Krizhevsky
et al., 2017), where all input filters densely connect
to each output filter, with the total number of train-
ing parameters as k
3
∗ f
2
(k
x
- stands for the kernel of
size x, features f = height ∗ width), a grouped convo-
lution is calculated within each group. Thus, it leads
to the parameters’ reduction, where the total number
of required weights is equal to k
3
∗ f
2
/g. Though g
is an additional hyperparameter and adjusts the total
number of weights, it is possible to regularize a net-
work by balancing the number of groups (Krizhevsky
et al., 2017), thus avoiding overfitting. Nonetheless,
the groups are isolated, where information flow across
groups is limited. To propagate an isolated data flow
along features/filters, a shuffle layer has been pro-
posed (Zhang et al., 2018b), allowing for information
flow between the groups and provides additional regu-
larization without additional operations (Zhang et al.,
2018b). However, since the shuffle operations are
symmetrical, where f ( f (x)) = x, it leads to a permu-
tation loop; thus, due to the wide-most spread of in-
formation, the large networks might overfit and report
performance degradation. Instead of pre-determined
paths, we introduce a novel Random Shuffle (Fig-
ure 3, right) operation (initialized per model, in each
block), where paths and the information flow is not
deterministic as in contrast to (Zhang et al., 2018b).
This decreases the probability of a permutation loop
to almost zero. Therefore, we utilize grouped convo-
lutions to reduce memory consumption and counter-
act the resulting isolation in information flow with a
novel random shuffle operation.
3.2 3DVox Skip Connection
ResNet- (Ridnik et al., 2021; He et al., 2019; Bello
et al., 2021) and Inception-like works (Szegedy et al.,
2015; Szegedy et al., 2016; Szegedy et al., 2017) are
utilizing unit kernel convolutions (k
1
) to narrow the
network, whereas we exclude those, as they result in
significant information loss (bottleneck). A represen-
tational bottleneck (Szegedy et al., 2016) refers to sig-
nificant data compression occurrence at a designated
forward stage (cut). Therefore, to keep the entirety
of the information in the 3D reconstruction task, it is
paramount to avoid bottlenecks. Moreover, instead of
shortcut connections as in ResNet-D (He et al., 2019)
blocks and the average pooling operation, which cre-
ates a high information loss, we suggest a novel re-
ducing skip connection block 3DVox, which con-
sists of S2D projections, followed by batch normal-
ization, non-linearity and pointwise convolution (Fig-
ure 5, skip connections in projected shortcut blocks).
Such an approach yields no bottlenecks, with almost
no extra computations and is required to adjust the
resolution between the S2D layer and the main path.
Therefore, the spatial dimension is traded for the fea-
ture one. It is essential to note the difference to a
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
206
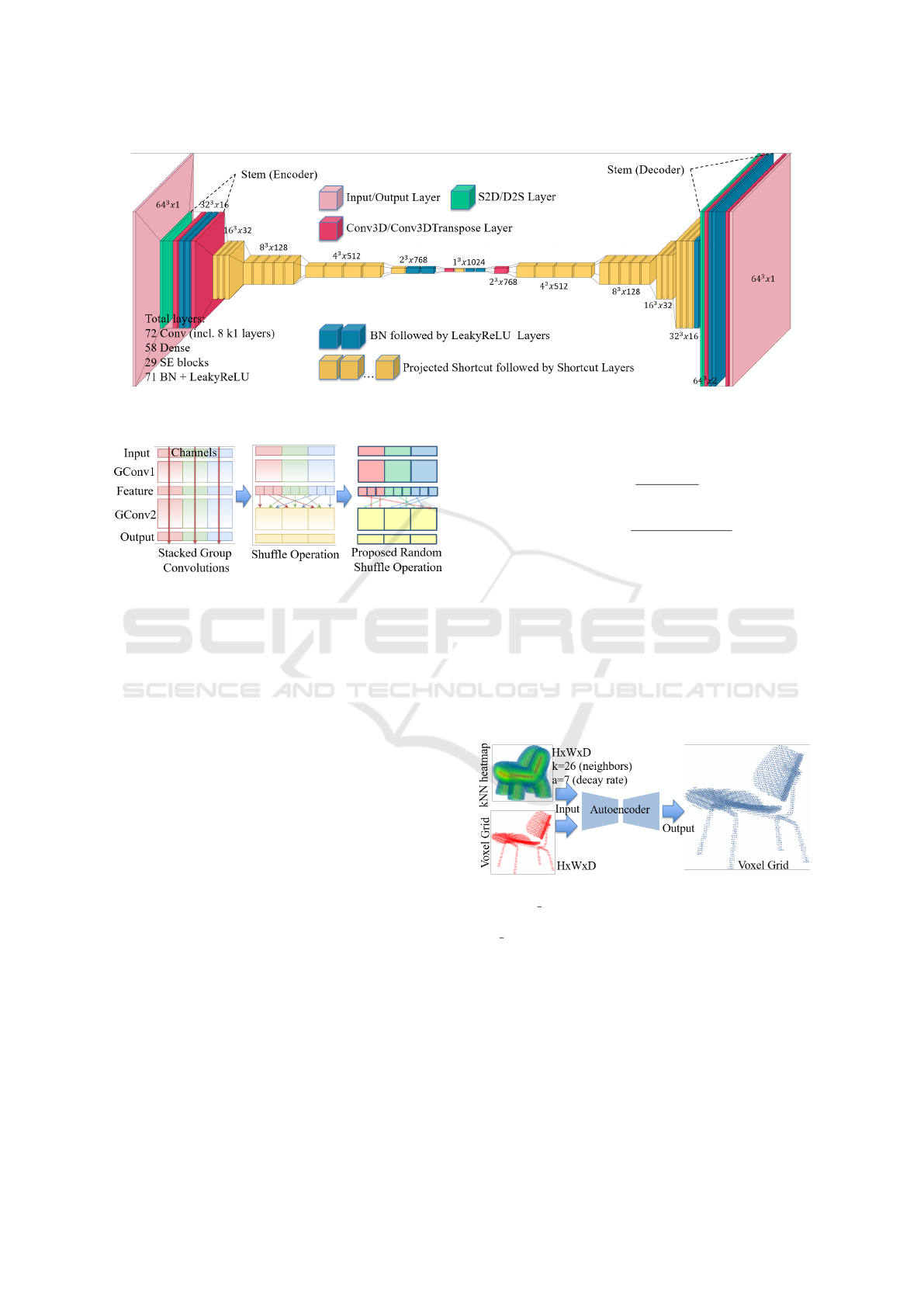
Figure 2: Visualization of our HD-VoxelFlex architecture (created with VisualKeras) for 64
3
inputs. Stem blocks for initial
dimensionality reduction are followed by shortcut and projected-shortcut blocks.
Figure 3: Middle: Shuffle operation as in line with Shuf-
fleNet (Zhang et al., 2018b), where paths are algorithmi-
cally pre-defined, sharing the information flow between the
groups uniformly. Most right: proposed Random Shuffle
operation. Information flow is shared non-uniformly, pro-
viding better regularization.
standard k
2
s
2
convolution, whereas in 3DVox the BN
layer aligns in both feature and spatial dimensions,
while k
2
s
2
projects in feature dimension only. There-
fore, it makes 3DVox more powerful in practice (see
Table 2).
3.3 Modelling Local Structure
Inspired by Graph Convolutions (Wang et al., 2019),
we propose to use a special layer to improve the mod-
elling of local structure in standard convolution lay-
ers. This is achieved using input masks as heatmaps,
where heat values incorporate local structure informa-
tion. We propose the usage of kNN-distance mask
(Figure 4) as heatmaps. To the best of our knowl-
edge, there are no prior works on utilizing kNN and
heatmap overall as an input, only as a weight mask
for loss optimization (Brock et al., 2016). We cal-
culate the heat values of the voxels as an average of
weights obtained from k neighbors, as in Equation 1.
A single weight w is squared inverse proportional to
the distance to the current neighbour (Equation 2).
h(v) =
k
∑
i∈1
w(v,v
i
)
k
(1)
w(v
1
,v
2
) =
1
(1 + a ∗ d
|v
1
,v
2
|
)
2
(2)
Here, a denotes the decay rate and d the dis-
tance function (e.g. Euclidean metric). Alternative
masks, e.g., proportional, constant, variance and den-
sity heatmaps, are considered and summarized in Ta-
ble 4. The kNN distance mask tend to be more ef-
fective than other approaches (proportional or con-
stant masks, variance or density heatmaps), where,
according to our hypothesis, the distance-based pat-
tern is less evident for NN in contrast to the voxel-
based neighbourhood.
Figure 4: Sample of the kNN heatmap with neighbours=26
and decay rate=7 fused with voxel grid input (red points),
where in a training routine, we set neighbours=4, de-
cay rate=1.
3.4 Bag of Tricks
Based on a set of previous works listed further in this
section, we employ a number of important techniques
to improve performance and reduce memory require-
ments of HD-VoxelFlex.
Minimization of Pointwise Convolutions. In contra-
diction to (Szegedy et al., 2016), we minimized point-
wise (k
1
) convolutions to enlarge the receptive field
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
207

Figure 5: Proposed pre-activated building blocks. Skip connections are shown in projected shortcut building blocks of down-
sampling (in encoder, s2d → bn + act → k
1
s
1
s) and upsampling (in decoder, tr k
1
s
1
s → bn + act → d2s) modules.
Figure 6: Comparison of full (Krizhevsky et al., 2017),
grouped (Krizhevsky et al., 2017) and depthwise (Howard
et al., 2017) convolutions based on 3D VGG-like (Si-
monyan and Zisserman, 2014) architecture trained on Mod-
elNet10 for reconstruction task.
and introduce better generalization capabilities (Rid-
nik et al., 2021). As reported in (Ridnik et al., 2021),
the increase of receptive field (utilization of k
3
ker-
nels) leads to reduced memory utilization. The ad-
ditional training parameters resulting from the larger
receptive fields are counteracted by grouped convo-
lutions (Krizhevsky et al., 2017) in pair with novel
random shuffling (see Section 3.1).
Minimization of Depthwise Convolutions. In con-
trast to previous works (Xie et al., 2017; Tan and Le,
2019; Howard et al., 2017), where authors claim that
the filter factorization leads to the model’s size be-
ing reduced, we refrain from using depthwise convo-
lutions (Howard et al., 2017), due to the ineffective
memory fragmentation as reported in (Ridnik et al.,
2021), resulting in poor GPU utilization. The numer-
ical assessments validating these assertions are in Fig-
ures 6, 7.
S2D/D2S Layers. We adopt another complementary
and effective method for reducing memory footprint,
known as a Space-to-Depth (S2D) layer (Shi et al.,
2016). The main advantage of S2D is the spatial and
subsequent feature-wise reduction of input maps, re-
Figure 7: Left: Coverage (higher better) metric compari-
son given different convolutions. Right: Minimum Match-
ing Distance (lower better) comparison given different con-
volutions. 3D VGG-like (Simonyan and Zisserman, 2014)
architecture trained on ModelNet10 used in reconstruction
task.
sulting in much lower memory consumption.
The S2D layer utilizes spatial correlation of its in-
put, making it effective at the early stages of the net-
work. On low-resolution input (i.e. at later stages),
inter-channel dependencies are stronger with no spa-
tial correlation.
An equivalent Symmetrical layer Depth-to-Space
(D2S) (Shi et al., 2016) is applied in Decoder, respec-
tively.
LeakyReLU. In contrast to the reported architectural
modifications as in (Sandler et al., 2018; Zhang et al.,
2018b), where linear activations instead of rectified
are applied, we propose to apply LeakyReLU, but
with a leak α
0
close to one. This larger leak value
counteracts the vanishing gradient problem that can
result from sparse activations resulting from sparse
HD voxel grid inputs.
In our experience, α
0
= 0.85 value leads to gra-
dient maximization without tedious and complex ar-
chitecture tuning, whereas 0.9 ≤ α
0
≤ 1.0 potentially
causes the lack of non-linearity and is, therefore, to be
avoided. Extended empirical evaluations in the form
of an ablation study, including model performance,
are reported in Table 3.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
208

Squeeze-and-Excitation Block. SE (Hu et al., 2018)
block is used to improve feature inter-connection and
plays the role of a feature-wise attention mechanism
to compensate for grouped convolutions. Various ap-
plication of SE is in (Zhang et al., 2018b).
Stochastic Depth. In addition to the aforementioned
building blocks, we utilize Stochastic Depth (Huang
et al., 2016) with probability = 0.8 to drop a residual
path.
3.5 Proposed Blocks & Convolutional
Architecture
Incorporating the elements discussed above, we pro-
pose a set of convolutional building blocks (Fig-
ure 5) to build effective 3D representations. These
blocks are: A) stem - aiming for an effective initial
dimensionality reduction of the input; B) shortcut -
a none-strided residual block comparable to TRes-
Net (Ridnik et al., 2021); C) project shortcut - novel
strided residual block empowered with 3DVox skip
connection.
The effective input reduction in the stem block is
achieved with S2D operations, followed by a few k
3
s
1
to avoid aliasing. The shortcut is the main building
block and is represented by a set of pre-activated (He
et al., 2016) k
3
s
1
grouped convolutions and empow-
ered by our random shuffling layer for the channel
interaction. The projected shortcut block includes
3DVox skip connection to reduce data spatially. The
upsampling blocks in the decoder follow a symmetry
principle to the downsampling blocks. In stem up-
sampling block, the S2D operation is replaced with
a reversed Depth-to-Space (D2S) operation followed
by a few of k
3
s
1
pre-activated layers with the pur-
pose of smoothing and final full-resolution activation.
The shortcut upsampling block completely coincides
with its downsampling counterpart, where convolu-
tions are replaced with a transposed version. The
primary modification occurs within the upsampling
projection shortcut block, specifically along a resid-
ual path, where the initial convolutions involve s
2
, ad-
ditionally explained by antialiasing and the nature of
fractionally strided (transposed) convolution. The or-
der of layers (bn → act → trk
1
s
1
→ d
2
s) on the short-
cut path is not symmetrical to the downsample block.
According to our experimental findings, this sequence
proves to be more effective. The principle of pre-
activation could potentially elucidate this: the sub-
sequent neural layer’s input signal should comprise
neurons that have already been activated in the pre-
ceding layer. Furthermore, we support this arrange-
ment through filters’ pre-alignment, where the subse-
quent trk
1
s
1
computes image tiles with enhanced spa-
tial correlation.
In Figure 2, we render HD-VoxelFlex architecture,
but in 3D) composed of the described earlier blocks,
where the low-level resolution is handled differently
since our novel blocks are not effective for the sizes 2
3
and 4
3
because the padding in 3D takes a significant
portion of the volume and ”dissolves” the signal. We
introduce a fully-convolutional structure and employ
a series of smaller kernel convolutions to minimize
the input significantly. However, the final convolution
equals a dense operation, particularly when the layer’s
local receptive field matches the input size.
4 EVALUATIONS
Datasets. We utilize ModelNet-40 (Wu et al., 2015)
and its sliced version ModelNet-10 (Wu et al., 2015)
datasets for training and evaluation purposes. These
commonly adopted datasets contain a variety of ob-
jects with complex geometries, therefore, serve the
purposes of our research. Additionally, we employ
the PCN (Yuan et al., 2018) dataset, a benchmark
for the completion task, to confirm the effectiveness
of HD-VoxelFlex. Due to a very sparse representa-
tion of the models (8 classes, in PCD) in PCN dataset,
we introduce (and make public) a new, voxel grid-
based PCN ground truth dataset, called VoxelPCN, in
128
3
and 192
3
resolutions. Besides, we make the en-
tire source code available, including the preprocess-
ing, dataset generation, and the framework for build-
ing 3D CNNs.
Preprocessing. PCD data itself is generated through
the random sampling of points from the CAD-
generated mesh’s triangular faces. Later, the data is
normalized to zero mean and embedded into a [-1,
1] bounding box, to preserve scale. The voxel grids
are formed from preprocessed point clouds, where
the voxel’s cell takes a ’full’ state if there is a point
in PCD at the corresponding location, ’empty’ other-
wise. Therefore, the level of detail depends on the
chosen voxel grid resolution under the assumption of
a high-density sampling step. Note, that while data
augmentation could be beneficial, we leave it for fu-
ture work. Unlike ModelNet10/40 datasets, where
meshes are available, PCN dataset comes with an al-
ready predefined set of sparse points preserving the
volumetric shape of each complete model with at
most 16384 points composed of 8 random FoV (par-
tial model representations). Therefore, the PCN sam-
pling step is omitted, involving only the normalization
and voxelization preprocessing stages.
Training Objective. In our work, we target the ge-
ometric completeness of the model given the recon-
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
209

struction task by utilizing a voxel-based input (prob-
ability of the voxel cell being filled), which makes
the chosen evaluation metrics more precise. Hence,
we address the limitations associated with the eval-
uation methods of point cloud (Wang et al., 2019)
and statistics-based methods (Wu et al., 2016), where
points are better reconstructed at denser areas; points
are being reconstructed at areas of high confidence,
respectively.
4.1 Metrics
The chosen metrics are split into four cate-
gories. The informational-based category includes
Binary-Cross Entropy (BCE) and Jensen-Shannon-
Divergence (JSD) metrics. The geometry-based cate-
gory includes Coverage and Minimum Matching Dis-
tance (MMD) metrics. The voxel-wise classifica-
tion category of metrics, where we work with binary
classification and measure Precision and Intersection-
over-Union (IoU) metrics. Lastly, the deep feature
supervised (SVM) and supervised classification cate-
gory on latent codes of encoded images, which ad-
dresses the diversity of the proposed model. We as-
sume that each voxel is given as a binary random vari-
able; therefore, Jensen-Shannon Divergence is formu-
lated as in Equation 3.
JSD(P
A
||P
B
) =
1
2
D(P
A
||M) +
1
2
D(P
B
||M) (3)
where M is the average value between predictions
and is given as M =
1
2
(P
A
+ P
B
). D(X||Y ) stands for
Kullback-Leibler Divergence between distributions X
and Y , i.e. amount of information loss.
The Coverage and MMD are calculated based on
Chamfer Distance given in Equation 4
d
CH
(S1,S2) =
∑
x∈S
1
min
y∈S
2
||x − y||
2
2
+
∑
y∈S
2
min
x∈S
1
||x − y||
2
2
(4)
Therefore, for each reconstructed point
{y
0
,y
1
,...,y
||S
2
||
} ∈ S
2
, there exists a set of
nearest neighbors in the original set N =
{x
0
,x
1
,...,x
||S
2
||
} ∈ S
1
. Chamfer Distance mea-
sures the minimum distance from each point of both
point sets to the corresponding nearest neighbors.
The Coverage is the ratio of unique points in N over
cardinality of S1 as is formulated in Equation 5.
Coverage(S2,S1) =
|||unique(N)||
||S
1
||
∗ 100% (5)
MMD distance stands for the average distance to the
covered points from the reconstructed point cloud.
Therefore, is the 2nd term of the Chamfer Distance
averaged with the cardinality of the reconstructed
point set as is formulated in Equation 6.
MMD(S2,S1) =
∑
||S
2
||
i=0
||N
i
− S
2
i
||
2
2
||S
2
||
(6)
Precision and IoU are calculated similarly to the
binary classification problem with the binary out-
come in the reconstruction of voxel grids as V
True
i, j,k
?
=
V
Reconstructed
j, j,k
. Therefore, it gives four possible out-
comes T P, TN, FP, FN. In practice, precision mea-
sures how exact the reconstruction is. Coverage
stands for the reconstruction of the volumetric sur-
face, where MMD measures how well-reconstructed
the surface is. Lastly, IoU reports how much common
surface the two models have relative to the overall sur-
face.
Table 1: Ablation study to emphasize the gain of the chosen
methods and introduced novelties.
Utilized bag of methods (tricks) Cov., %
ResnetD block
(He et al., 2019) +21.17
Grouped Convolutions (GC)
(Krizhevsky et al., 2017) (Section 3) +0.06
Decrease Pointwise/Increase GC
(He et al., 2019) (Sect. 3) +7.31
Groups everywhere / Shuffling +0.78
No Pointwise Conv. (PwC)
(Ridnik et al., 2021) (Section 3) +1.3
Space-to-Depth (S2D)
(Shi et al., 2016) (Section 3) -0.46
Zero padding +0.12
Stochastic Depth
(Huang et al., 2016) +2.09
Label Smoothing
(Szegedy et al., 2016) +0.64
SE Blocks
(Hu et al., 2018) +0.16
Leaky ReLU = 0.85 (Section 3.4) +5.32
Our novelties
Random Shuffling (Section 3.1) +0.57
3DVox Skip Connections (Sect. 3) +2.02
kNN Distance Masking (Section 3.3) +2.6
Table 2: Evaluation of reducing skip-connections.
Approach BCE Coverage MMD
No projected
shortcuts(baseline)
0.0610 81.09 0.0085
Pooling + k1s1(SOTA) 0.0611 81.65 0.0082
Concatenation
(Zhang et al., 2018b) 0.0779 81.47 0.0084
S2D + k1s1 (3DVox) 0.0681 83.11 0.0074
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
210

Figure 8: HD-VoxelFlex shows a minor increase in mem-
ory utilization with a significant input size increase (from
2.3K → 10K → 40K → 85K, where points are averaged),
while preserving the best performance despite significant
data sparsity.
4.2 Quantitative Evaluations
We perform various evaluations given low-resolution
32
3
/64
3
and high-resolution 128
3
/192
3
voxel grid se-
tups. The number of occupied voxel grid cells (see
Figure 8) as the sparseness ratio increases with the
increase of voxel grid resolution. The models in
PCN (Yuan et al., 2018) dataset are always described
with a fixed number of points (16384). Thus, we in-
troduce a voxel-based version of PCN dataset.
As shown in Table 5, given the lower/higher def-
inition input, HD-VoxelFlex models (with and with-
out the mask) demonstrate state-of-the-art results in
reconstruction. The overall drop in performance is
driven by the increased data sparsity as the result of
enlarging voxel grid resolution. 3D-GAN shows plau-
sible results. Segmentation models with low resolu-
tion have shown good results; however, the utiliza-
tion of shortcut connections makes them unusable for
our purposes. Notably, our models are much better
on coverage while still demonstrating performance on
classification (Table 6), which is on par with the state-
of-the-art.
4.3 Qualitative Evaluations
Qualitative evaluations are shown in Figures 9. For a
lower definition voxel grid (32
3
/64
3
), we’ve obtained
close to 100% coverage for simple shapes, whereas
for more complex shapes, coverage dropped to ∼90-
93% (samples of figures with associated metrics are
on Figures 10 and 11, with their corresponding met-
rics provided in Tables 7 and 8, respectively). For
the higher definition voxel grid (128
3
), renderings
confirm a drop in performance caused by increased
sparsity and the underlying complexity of input (Fig-
ures 12, and 13, in Appendix).
4.4 Ablation and Memory Evaluations
In Table 1, we report the gain (Coverage in % re-
garding the overall performance of the baseline VGG-
3D (Simonyan and Zisserman, 2014)) of the selected
methods. Moreover, we list the gain of introduced
novelties. Importantly, as depicted in Figure 8, we
report GPU usage, where point cloud-based meth-
ods consume more vGPU than convolutional, whereas
GraphConv.-based methods (10k of points, 64
3
) have
run into memory overflow. 3DGAN network con-
sumes less memory than HD-VoxelFlex in lower res-
olution setups; however, we empirically demonstrate
almost linear growth in memory utilization with the
resolution increase. 3DGAN, on the other hand,
demonstrates a drastic increase in memory usage.
This proves our research objective that HD-VoxelFlex
effectively represents high-definition voxel grid in-
puts despite sparsity and memory utilization chal-
lenges.
An additional input (a heatmap), also referred to
as a mask, is considered. Various input masks were
tested in experiments and reported as ablation study in
Table 4. A proportional mask, where the heat values
encode a ratio between full and empty voxels. There-
fore, the proportional masks are mainly considered in
sparse voxel grids and is to be considered in future
work in higher-resolution setups with further evalua-
tions related to PCN and/or Completion3D datasets.
Yet, in setups with 64
3
no significant improvements
were indicated, which is potentially justified by the
ability of HD-VoxelFlex to recover the ratio between
empty and full cells. A constant mask, stands for
a more generalized version of a proportional mask,
where the heat values are assigned a pre-defined
pair of constants. No significant improvements were
shown in the course of the ablation 4 study either. The
construction of a variance heatmap relies on calcu-
lating the variance within a designated receptive win-
dow, where the entirely empty or full windows, are
being assigned with null variance. Therefore, it is
meant to empower the reconstruction of the border re-
gions of the model, where improvements were shown
in comparison to previous ones. The concept of the
density heatmap drew inspiration from the classical
Minesweeper game, where the heat value is indicative
of how many filled voxels (mines) are adjacent to the
current voxel. The shown performance is compara-
ble to the early introduced variance heatmap. The ap-
proach suggested in this work, k-Nearest Neighbors
Distance (kNN) input mask, is the most refined tech-
nique in comparison to previously listed ones. Ad-
ditionally, its performance was confirmed by the re-
ported ablation study. The heat values are estimated
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
211
Table 3: Ablation evaluation of activation functions on VGG-like 3D architecture. LeakyReLU with the leak value set to 0.85
empirically shown the best performance.
Activation BCE Coverage MMD
LeakyReLU (0.1) 0.0922 80.59 0.5342
LeakyReLU (0.3) 0.785 80.76 0.5485
LeakyReLU (0.85) 0.0669 83.72 0.5407
LeakyReLU (1.2) 0.0688 83.15 0.5031
ReLU 0.0812 79.86 0.5187
Hard sigmoid (Courbariaux et al., 2015) 0.0878 77.87 0.5711
Sigmoid 0.0893 77.08 0.5895
PReLU (0.85) (He et al., 2015) 0.0688 83.28 0.5464
cw-PReLU (0.85) 0.0677 83.09 0.5428
Swish (β = 1) (Ramachandran et al., 2017) 0.0838 79.52 0.5457
Swish (β = 0.05) 0.0878 81.23 0.6320
Swish (β = 1) 0.0864 78.74 0.5581
SELU (Klambauer et al., 2017) 0.0827 81.44 0.5470
rReLU(-1.5, 1.4, 0.85, 1.4, 1.5) 0.0754 82.79 0.5571
rReLU(-2.5, 0.2, 0.7, 0.2, 2.5) 0.0766 81.82 0.5012
Table 4: Ablation report for different masking methods for 64
3
voxel grid setup. Note that a set of evaluations is yet to be
conducted in future for higher-resolution voxel-grid setups, considering the proportional mask and its benefits. Moreover, a
combination of numerous masks is also planned, aiming to combine the benefits of each individual method. However, an
expensive fine-tuning is to be assumed.
Description Coverage, % MMD Precision, %
No mask applied (baseline) 85,56% 5,59E-03 83,09%
Constant weighed mask (gamma=0.97) 75,49% 1,07E-02 67,40%
Constant weighed mask (gamma=0.97); voxels normalization 80,18% 7,98E-03 74,89%
Proportional weighed mask 80,07% 8,17E-03 75,28%
Proportional weighed mask; unit normalization 80,74% 7,58E-03 76,48%
Proportional weighed mask; voxels normalization 78,83% 8,39E-03 73,65%
Variance area=1 84,77% 7,11E-03 82,45%
Variance area=1; ls=0.05 84,76% 7,05E-03 82,40%
Variance area=1; ls=0.0 82,71% 9,02E-03 80,02%
Variance area=3; ls=0.05 84,08% 1,25E-02 81,48%
Variance area=1; ls=0.26; voxels normalization 84,95% 6,90E-03 82,48%
Variance area=3; ls=0.26; voxels normalization 84,19% 9,65E-03 81,87%
Density area=3; intensity=(1, 1); ls=0.05 82,25% 1,95E-02 79,21%
Density area=3; intensity=(1, 1); ls=0.26; voxel normalization 82,77% 2,32E-02 79,75%
Density area=1; intensity=(3, 1); 84,89% 7,04E-03 82,43%
Density area=1; intensity=(5, 1); 84,41% 7,27E-03 82,04%
Density area=2; intensity=(5, 1); 83,60% 1,44E-02 80,92%
KNN k=1; a=4 88,16% 4,43E-03 86,55%
KNN k=1; a=7 88,04% 4,52E-03 85,71%
KNN k=8; a=7 84,44% 6,02E-03 81,27%
KNN k=26; a=7 88,11% 4,44E-03 86,41%
based on distances from the current voxel to its k-
nearest filled neighbours, with a fixed decay rate. A
moderate set of parameters is to be chosen to avoid
overfitting. To resume, the kNN distance input mask
proved its effectiveness and is reported in Table 4.
5 DISCUSSION, FUTURE WORK
In-place activated batch normalization (Bulo et al.,
2018) approach is considered a reasonable way to
reduce GPU usage since no additional memory is
needed for backpropagation. Instead, an update to
the weights is calculated on the fly from an output
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
212
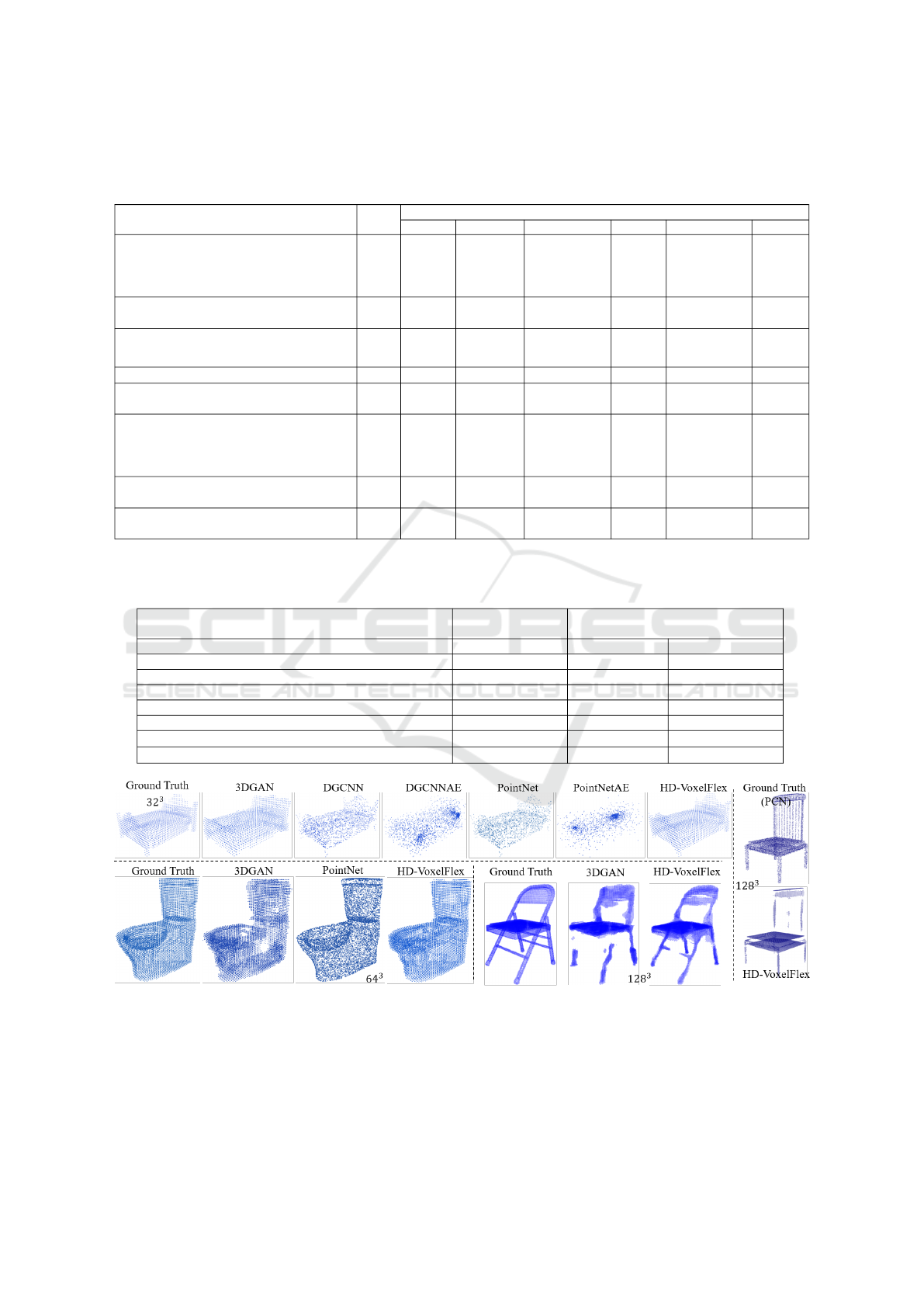
Table 5: Numerical evaluations given ModelNet10 (Wu et al., 2015) and PCN (Yuan et al., 2018) datasets in various reso-
lutions. PCN dataset is much sparser due to the absence of a sampling step as we work directly with predefined point cloud
data, which causes a significant drop in evaluation metrics.
Architecture Res.
Reconstruction
BCE JSD Coverage, % MMD Precision, % IoU, %
3DGAN (Wu et al., 2016)
32
3
64
3
128
3
192
3
0.4317
0.4084
0.4053
0.4000
3.95E-05
2.74E-06
4.40e-08
4.81e-09
74.75
76.91
64.66
52.24
0.0234
0.0107
0.0144
0.0185
69.73
72.46
51.42
35.90
53.53
56.81
34.61
21.88
PointNet (Qi et al., 2017a)
32
3
64
3
- -
90.57
73.48
0.0087
0.0674
86.11
59.5
43.93
35.38
PointNetAE (Qi et al., 2017a; Achlioptas
et al., 2017)
32
3
64
3
- -
39.81
27.65
0.0557
0.1292
17.46
14.33
7.02
4.25
DGCNN (Wang et al., 2019) 32
3
- -
89.72 0.0093 85.26 47.96
DGCNNAE (Wang et al., 2019; Achliop-
tas et al., 2017)
32
3
- -
52.08 0.0429 22.71 9.08
HD-VoxelFlex (ours)
32
3
64
3
128
3
192
3
0.3934
0.4004
0.3970
0.3956
5.76E-06
1.30E-06
2.42e-08
6.49e-09
96.11
85.56
78.05
69.20
0.0025
0.0056
0.0055
0.0072
95.81
83.09
73.00
62.11
91.96
71.08
57.48
45.04
HD-VoxelFlex Mask (ours)
32
3
64
3
0.3947
0.3979
1.86E-05
1.11E-06
96.24
88.16
0.0025
0.0044
95.89
86.55
92.11
76.30
HD-VoxelFlex (PCN (Yuan et al., 2018)
dataset)
128
3
0.3913 1.35e-08 50.18 0.0104 38.88 24.13
Table 6: The numerical evaluations for lowerer definition voxel grids (32
3
) with ∼ 2K of points and (64
3
) with ∼ 10K of
points, respectively. HD-VoxelFlex shows comparable to the state-of-the-art results in the classification task, where given
ModelNet10 (Wu et al., 2015) dataset, we outperform SOTA models in the supervised classification.
Resolution=32
3
/64
3
Deep Feature
Classification, %
Supervised Classification, %
Architecture SVM MN10 MN40
3DGAN (Wu et al., 2016) 87.61 / 89.29 90.35 / 90.95 84.58 / 84.42
PointNet (Qi et al., 2017a) 74.44 / 72.21 91.51 / 90.90 87.70 / 88.32
PointNetAE (Qi et al., 2017a; Achlioptas et al., 2017) 22.32 / 13.73 - -
DGCNN (Wang et al., 2019) 69.53 / - 91.95 / - 91.50 / -
DGCNNAE (Wang et al., 2019; Achlioptas et al., 2017) 11.27 / - - -
VoxelFlex (ours) 84.71
3rd
/88.06
2nd
90.90/91.89 86.92/86.43
VoxelFlex (ours with mask) 87.39
2nd
/85.49 91.60
2nd
/92.25 87.23
3rd
/86.73
2nd
Figure 9: Qualitative renderings of random samples with different geometry and level of detail complexity. HD-VoxelFlex
demonstrates the best performance, including complex inputs and higher resolutions 128
3
. While the direct approaches (with
suffix AE), due to the lack of local features, demonstrate the lowest. In 64
3
setup, the overall performance is lower than 32
3
due to the increased data sparsity. The same holds in relation to 128
3
. DGCNN and DGCNNAE results are not shown in 64
3
resolution due to insufficient vGPU memory. PointNetAE in 64
3
is removed because of the poor performance. We provide
a sample from PCN dataset in 128
3
, where HD-VoxelFlex tends to recover a more structural (grid-based) representation
(targeted intention).
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
213
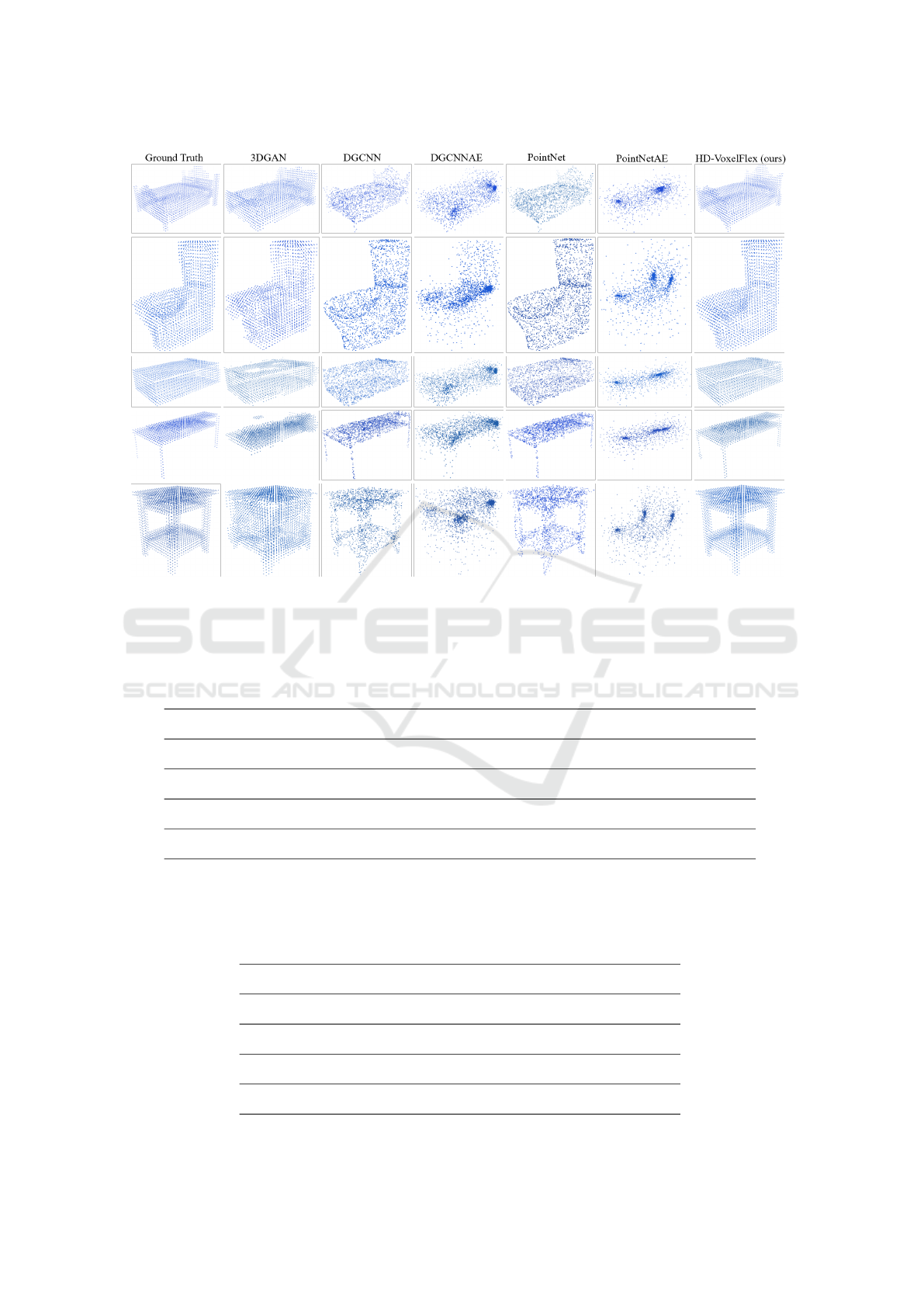
Figure 10: The qualitative renderings of 32
3
or ∼ 2.3K (in the setups with raw point cloud data input) points with different
geometrical complexity. The introduced HD-VoxelFlex shows the best performance, including complex models. While the
direct approaches (with suffix AE), due to the lack of local features, demonstrate the lowest. The affiliated sampled-based
performance is listed in Table 7.
Table 7: Coverage and MMD numerical evaluations, which correspond to the 32
3
voxel grid qualitative renderings plotted in
Figure 10. In all randomly provided samples, the HD-VoxelFlex approach demonstrates the best performance.
Ground Truth 3DGAN DGCNN DGCNNAE PointNet PointNetAE VoxelFlex (ours)
Coverage = 100% 84,26% 90,11% 58,84% 88,78% 39,55% 95,76%
MMD = 0 1,17E-02 1,57E-02 5,95E-02 1,71E-02 8,21E-02 2,71E-03
Coverage = 100% 73,32% 85,90% 47,82% 91,98% 39,88% 95,01%
MMD = 0 2,18E-02 1,33E-02 6,61E-02 6,83E-03 8,47E-02 3,27E-03
Coverage = 100% 85,82% 94,73% 59,32% 93,99% 40,61% 98,99%
MMD = 0 1,06E-02 5,79E-03 9,15E-02 7,19E-03 1,38E-01 6,31E-04
Coverage = 100% 75,99% 95,83% 50,77% 93,06% 48,53% 98,53%
MMD = 0 1,85E-02 4,69E-03 6,68E-02 5,41E-03 7,62E-02 1,05E-03
Coverage = 100% 68,86% 88,03% 39,59% 91,33% 26,20% 97,25%
MMD = 0 3,91E-02 1,22E-02 9,56E-02 6,93E-03 1,59E-01 1,74E-03
Table 8: Coverage and MMD numerical evaluations, which correspond to the 64
3
voxel grid qualitative renderings plotted
in Figure 11. Note that despite a better-shown performance of PointNet in Coverage (bottom sample), the MMD result
still confirms that our approach is better in fine-grained reconstruction. In the remaining random samples, our approach
demonstrates the best performance.
Ground Truth 3DGAN PointNet PointNetAE VoxelFlex (ours)
Coverage = 100% 91,88% 88,05% 0,53% 93,91%
MMD = 0 9,48E-03 1,08E-02 5,70E-01 2,71E-03
Coverage = 100% 77,63% 90,36% 55,94% 90,80%
MMD = 0 1,54E-02 6,46E-03 6,88E-02 4,56E-03
Coverage = 100% 91,19% 94,77% 1,06% 97,29%
MMD = 0 6,54E-03 8,61E-03 6,98E-01 8,72E-04
Coverage = 100% 87,97% 63,84% 64,58% 96,06%
MMD = 0 1,10E-02 2,80E-02 5,86E-02 4,57E-03
Coverage = 100% 86,34% 94,59% 48,18% 91,54%
MMD = 0 1,03E-02 5,33E-03 7,38E-02 2,70E-03
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
214
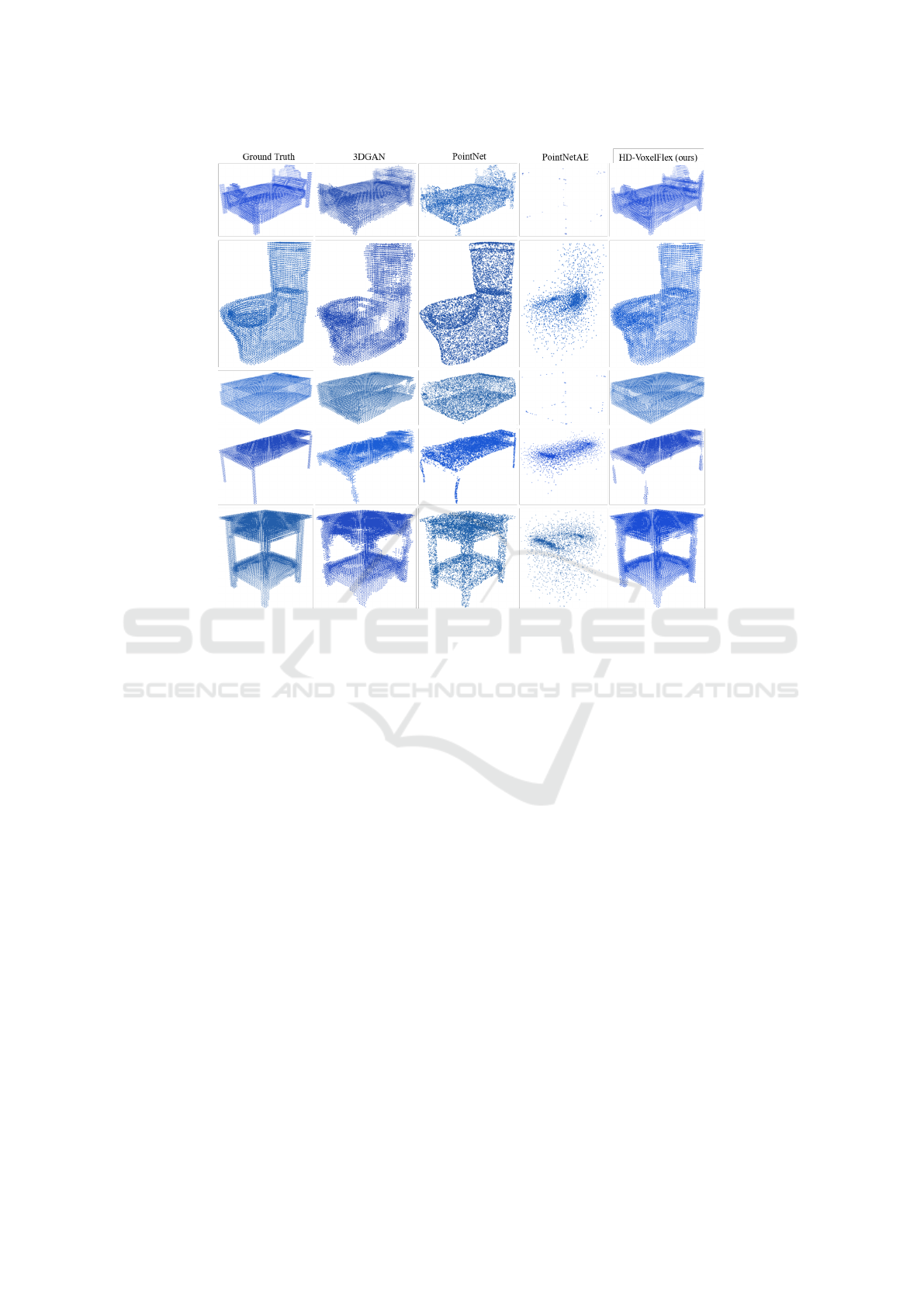
Figure 11: The qualitative renderings of 64
3
or ∼ 10K (in the setups with raw point cloud data) points with different geo-
metrical complexity. The introduced HD-VoxelFlex shows the best performance, including complex models. While the direct
approaches (with suffix AE), due to the lack of local features, demonstrate the lowest. DGCNN and DGCNNAE results are
not shown due to out-of-memory errors. The affiliated sampled-based performance is listed in Table 8.
map after activation (increased voxel grid, but slower
training routine). Besides, potentially, the biggest
drawback for 3D convolutions is the sparsity of input.
Therefore, Sparse Convolutions (Yan et al., 2018) can
be tested, where multiplications are dependent on a
special scheduling rule book, which addresses non-
zero voxels and their multiplications. Hence, this
potentially makes HD-VoxelFlex applicable to large
indoor/outdoor scenes. Followed by an additional
comparative study to sparse voxel-based (Zhao et al.,
2022) input methods. Furthermore, it is interesting
to incorporate HD-VoxelFlex with Neural Radiance
Fields (Mildenhall et al., 2020) (NRF) to improve the
overall reconstruction performance. Moreover, Gaus-
sian Mixture Models (GMM) (Achlioptas et al., 2018)
has proven its effectiveness for synthesizing unseen
models; therefore, it is yet a question to explore.
6 CONCLUSION
This work addresses high-definition voxel grid rep-
resentation inputs by proposing a novel 3D CNN ar-
chitecture called HD-VoxelFlex. Despite the sparsity
and high-memory utilization challenges, we show that
3D CNN on voxel grid inputs are more reasonable for
3D representation, where HD-VoxelFlex can handle
higher definition input without compromising mem-
ory utilization. Importantly, a set of improvements
were suggested, like novel random shuffling, reduced
skip connection, a set of novel building blocks, and
kNN distance mask fuse, forming an improved ar-
chitecture and resulting in state-of-the-art results in
reconstruction. Besides, our model demonstrated re-
sults on the level with the SOTA in classification.
ACKNOWLEDGEMENTS
This work has been funded by the German Ministry
for Research and Education (BMBF) in the project
MOMENTUM (grant number 01IW22001) and open-
SCENE (Software Campus program) project.
P. M
¨
uller was funded by the European Union
Horizon Europe program (grant number 101078950).
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
215

REFERENCES
Achlioptas, P., Diamanti, O., Mitliagkas, I., and Guibas,
L. (2017). Representation learning and adversar-
ial generation of 3d point clouds. arXiv preprint
arXiv:1707.02392, 2(3):4.
Achlioptas, P., Diamanti, O., Mitliagkas, I., and Guibas, L.
(2018). Learning representations and generative mod-
els for 3d point clouds. In International conference on
machine learning, pages 40–49. PMLR.
Bello, I., Fedus, W., Du, X., Cubuk, E. D., Srinivas, A.,
Lin, T.-Y., Shlens, J., and Zoph, B. (2021). Revisit-
ing resnets: Improved training and scaling strategies.
Advances in Neural Information Processing Systems,
34:22614–22627.
Boulch, A. and Marlet, R. (2022). Poco: Point convolu-
tion for surface reconstruction. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 6302–6314.
Brock, A., Lim, T., Ritchie, J. M., and Weston, N.
(2016). Generative and discriminative voxel modeling
with convolutional neural networks. arXiv preprint
arXiv:1608.04236.
Bulo, S. R., Porzi, L., and Kontschieder, P. (2018). In-place
activated batchnorm for memory-optimized training
of dnns. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
5639–5647.
Courbariaux, M., Bengio, Y., and David, J.-P. (2015). Bina-
ryconnect: Training deep neural networks with binary
weights during propagations. Advances in neural in-
formation processing systems, 28.
Hatamizadeh, A., Tang, Y., Nath, V., Yang, D., Myronenko,
A., Landman, B., Roth, H. R., and Xu, D. (2022). Un-
etr: Transformers for 3d medical image segmentation.
In Proceedings of the IEEE/CVF winter conference on
applications of computer vision, pages 574–584.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delv-
ing deep into rectifiers: Surpassing human-level per-
formance on imagenet classification. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 1026–1034.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
He, T., Zhang, Z., Zhang, H., Zhang, Z., Xie, J., and Li,
M. (2019). Bag of tricks for image classification with
convolutional neural networks. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 558–567.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 7132–7141.
Huang, G., Sun, Y., Liu, Z., Sedra, D., and Weinberger,
K. Q. (2016). Deep networks with stochastic depth. In
Computer Vision–ECCV 2016: 14th European Con-
ference, Amsterdam, The Netherlands, October 11–
14, 2016, Proceedings, Part IV 14, pages 646–661.
Springer.
Klambauer, G., Unterthiner, T., Mayr, A., and Hochreiter, S.
(2017). Self-normalizing neural networks. Advances
in neural information processing systems, 30.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Communications of the ACM, 60(6):84–90.
Li, W., Wang, G., Fidon, L., Ourselin, S., Cardoso, M. J.,
and Vercauteren, T. (2017). On the compactness, ef-
ficiency, and representation of 3d convolutional net-
works: brain parcellation as a pretext task. In Infor-
mation Processing in Medical Imaging: 25th Inter-
national Conference, IPMI 2017, Boone, NC, USA,
June 25-30, 2017, Proceedings 25, pages 348–360.
Springer.
Li, Z., Gao, P., Yuan, H., Wei, R., and Paul, M. (2023).
Exploiting inductive bias in transformer for point
cloud classification and segmentation. arXiv preprint
arXiv:2304.14124.
Liao, Y., Donne, S., and Geiger, A. (2018). Deep march-
ing cubes: Learning explicit surface representations.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 2916–2925.
Liu, Z., Tang, H., Lin, Y., and Han, S. (2019). Point-voxel
cnn for efficient 3d deep learning. Advances in Neural
Information Processing Systems, 32.
Mescheder, L., Oechsle, M., Niemeyer, M., Nowozin, S.,
and Geiger, A. (2019). Occupancy networks: Learn-
ing 3d reconstruction in function space. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 4460–4470.
Mi, Z., Di, C., and Xu, D. (2022). Generalized binary search
network for highly-efficient multi-view stereo. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 12991–13000.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2020). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. In ECCV.
Oleksiienko, I. and Iosifidis, A. (2021). Analysis of voxel-
based 3d object detection methods efficiency for real-
time embedded systems. In 2021 International Con-
ference on Emerging Techniques in Computational In-
telligence (ICETCI), pages 59–64. IEEE.
Phan, A. V., Le Nguyen, M., Nguyen, Y. L. H., and Bui,
L. T. (2018). Dgcnn: A convolutional neural network
over large-scale labeled graphs. Neural Networks,
108:533–543.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. Advances in neural information pro-
cessing systems, 30.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
216

Radford, A., Metz, L., and Chintala, S. (2015). Unsu-
pervised representation learning with deep convolu-
tional generative adversarial networks. arXiv preprint
arXiv:1511.06434.
Ramachandran, P., Zoph, B., and Le, Q. V. (2017).
Searching for activation functions. arXiv preprint
arXiv:1710.05941.
Ran, H., Liu, J., and Wang, C. (2022). Surface representa-
tion for point clouds. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 18942–18952.
Ridnik, T., Lawen, H., Noy, A., Ben Baruch, E., Sharir,
G., and Friedman, I. (2021). Tresnet: High perfor-
mance gpu-dedicated architecture. In proceedings of
the IEEE/CVF winter conference on applications of
computer vision, pages 1400–1409.
Riegler, G., Osman Ulusoy, A., and Geiger, A. (2017). Oct-
net: Learning deep 3d representations at high reso-
lutions. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 3577–
3586.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Medical Image Computing and
Computer-Assisted Intervention–MICCAI 2015: 18th
International Conference, Munich, Germany, October
5-9, 2015, Proceedings, Part III 18, pages 234–241.
Springer.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Schwarz, K., Sauer, A., Niemeyer, M., Liao, Y., and
Geiger, A. (2022). Voxgraf: Fast 3d-aware image
synthesis with sparse voxel grids. arXiv preprint
arXiv:2206.07695.
Shi, W., Caballero, J., Husz
´
ar, F., Totz, J., Aitken, A. P.,
Bishop, R., Rueckert, D., and Wang, Z. (2016). Real-
time single image and video super-resolution using an
efficient sub-pixel convolutional neural network. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 1874–1883.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Su, H., Maji, S., Kalogerakis, E., and Learned-Miller, E.
(2015). Multi-view convolutional neural networks for
3d shape recognition. In Proceedings of the IEEE
international conference on computer vision, pages
945–953.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. (2017).
Inception-v4, inception-resnet and the impact of resid-
ual connections on learning. In Proceedings of the
AAAI conference on artificial intelligence, volume 31.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Tatarchenko, M., Dosovitskiy, A., and Brox, T. (2017). Oc-
tree generating networks: Efficient convolutional ar-
chitectures for high-resolution 3d outputs. In Proceed-
ings of the IEEE international conference on com-
puter vision, pages 2088–2096.
Valsesia, D., Fracastoro, G., and Magli, E. (2018). Learn-
ing localized generative models for 3d point clouds
via graph convolution. In International conference on
learning representations.
Wang, H., Jiang, Z., Yi, L., Mo, K., Su, H., and Guibas,
L. J. (2020). Rethinking sampling in 3d point
cloud generative adversarial networks. arXiv preprint
arXiv:2006.07029.
Wang, P.-S., Liu, Y., Guo, Y.-X., Sun, C.-Y., and Tong,
X. (2017). O-cnn: Octree-based convolutional neu-
ral networks for 3d shape analysis. ACM Transactions
On Graphics (TOG), 36(4):1–11.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn
for learning on point clouds. Acm Transactions On
Graphics (tog), 38(5):1–12.
Wu, J., Wang, Y., Xue, T., Sun, X., Freeman, B., and Tenen-
baum, J. (2017). Marrnet: 3d shape reconstruction via
2.5 d sketches. Advances in neural information pro-
cessing systems, 30.
Wu, J., Zhang, C., Xue, T., Freeman, B., and Tenenbaum, J.
(2016). Learning a probabilistic latent space of object
shapes via 3d generative-adversarial modeling. Ad-
vances in neural information processing systems, 29.
Wu, J., Zhang, C., Zhang, X., Zhang, Z., Freeman, W. T.,
and Tenenbaum, J. B. (2018). Learning shape pri-
ors for single-view 3d completion and reconstruction.
In Proceedings of the European Conference on Com-
puter Vision (ECCV), pages 646–662.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d shapenets: A deep representa-
tion for volumetric shapes. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1912–1920.
Xiang, P., Wen, X., Liu, Y.-S., Cao, Y.-P., Wan, P., Zheng,
W., and Han, Z. (2021). Snowflakenet: Point cloud
completion by snowflake point deconvolution with
skip-transformer. In Proceedings of the IEEE/CVF
international conference on computer vision, pages
5499–5509.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Yan, Y., Mao, Y., and Li, B. (2018). Second:
Sparsely embedded convolutional detection. Sensors,
18(10):3337.
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
217

Yuan, W., Khot, T., Held, D., Mertz, C., and Hebert, M.
(2018). Pcn: Point completion network. In 2018 inter-
national conference on 3D vision (3DV), pages 728–
737. IEEE.
Zhang, K., Hao, M., Wang, J., de Silva, C. W., and Fu, C.
(2019). Linked dynamic graph cnn: Learning on point
cloud via linking hierarchical features. arXiv preprint
arXiv:1904.10014.
Zhang, X., Zhang, Z., Zhang, C., Tenenbaum, J., Freeman,
B., and Wu, J. (2018a). Learning to reconstruct shapes
from unseen classes. Advances in neural information
processing systems, 31.
Zhang, X., Zhou, X., Lin, M., and Sun, J. (2018b). Shuf-
flenet: An extremely efficient convolutional neural
network for mobile devices. In Proceedings of the
IEEE conference on computer vision and pattern
recognition, pages 6848–6856.
Zhao, L., Xu, S., Liu, L., Ming, D., and Tao, W. (2022).
Svaseg: Sparse voxel-based attention for 3d lidar
point cloud semantic segmentation. Remote Sensing,
14(18):4471.
Zimmer, W., Ercelik, E., Zhou, X., Ortiz, X. J. D., and
Knoll, A. (2022). A survey of robust 3d object
detection methods in point clouds. arXiv preprint
arXiv:2204.00106.
APPENDIX
Figure 12: The qualitative renderings of 128
3
voxel grid
given ModelNet10 dataset. HD-VoxelFlex in comparison
to 3DGAN, demonstrates a better coverage as seen from the
renderings; thus, it preserves the overall volume of the input
models with a significantly finer level of details despite the
sparseness challenge (on average 1.9% of filled voxel cells
out of the total number of 128
3
).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
218

Figure 13: The qualitative renderings of 128
3
voxel grid
given PCN dataset. The PCN dataset contains a sparser
representation of the models (16384 points per model, 8
classes); thus, on average, only 0.7% of filled voxel cells
are engaged. Nonetheless, HD-VoxelFlex demonstrates im-
pressive results, as seen from the visual samples, where HD-
VoxelFlex works well in the areas where the model is struc-
turally balanced and densely represented.
HD-VoxelFlex: Flexible High-Definition Voxel Grid Representation
219
