
Dynamic Path Planning for Autonomous Vehicles: A Neuro-Symbolic
Approach
Omar Elrasas
1
, Nourhan Ehab
1
,Yasmin Mansy
1
and Amr El Mougy
2
1
Department of Computer Science and Engineering, German University in Cairo, Cairo, Egypt
2
Department of Computer Science and Engineering, American University in Cairo, Cairo, Egypt
Keywords:
Neuro-Symbolic AI, Dynamic Path Planning, Autonomous Vehicles.
Abstract:
The rise of autonomous vehicles has transformed transportation, promising safer and more efficient mobility.
Dynamic path planning is crucial in autonomous driving, requiring real-time decisions for navigating complex
environments. Traditional approaches, like rule-based methods or pure machine learning, have limitations
in addressing these challenges. This paper explores integrating Neuro-Symbolic Artificial Intelligence (AI)
for dynamic path planning in self-driving cars, creating two regression models with the Logic Tensor Net-
works (LTN) Neuro-Symbolic framework. Tested on the CARLA simulator, the project effectively followed
road lanes, avoided obstacles, and adhered to speed limits. Root mean square deviation (RMSE) gauged the
LTN models’ performance, revealing significant improvement, particularly with small datasets, showcasing
Neuro-Symbolic AI’s data efficiency. However, LTN models had longer training times compared to linear and
XGBoost regression models.
1 INTRODUCTION
Self-driving vehicles are a transformative technology
with the potential to revolutionize global transporta-
tion systems. The ability of autonomous cars to sense,
decide, and navigate dynamic environments relies on
sophisticated computational models and complex al-
gorithms. Among the challenges faced, dynamic path
planning is crucial for real-time decision-making and
adaptability to changing road conditions.
Conventional approaches to path planning in self-
driving cars include rule-based methodologies and
pure machine learning techniques (Gonz
´
alez et al.,
2015). However, rule-based methods struggle with
adaptability, while machine learning methods lack
transparency. Addressing these challenges requires
an approach that combines clear rule-based thinking
with machine learning capabilities. Neuro-Symbolic
approaches aim to achieve this integration by com-
bining symbolic reasoning with deep neural networks
(Sarker et al., 2021).
Our objective is to explore Neuro-Symbolic Com-
puting for dynamic path planning in autonomous ve-
hicles. The aim is to develop a path planning system
that can swiftly adapt to changing road conditions and
potential risks. The paper investigates the integration
of symbolic reasoning techniques with deep learning
models using the Logic Tensor Network framework
(Badreddine et al., 2022), resulting in a data-efficient
Neuro-Symbolic regression model.
The rest of the paper is organized as follows. Sec-
tion 2 provides background information, Section 3
discusses related research, and Section 4 presents the
proposed neuro-symbolic path planning system. Sec-
tion 5 explains model evaluation and presents results,
including comparisons with other machine learning
methods. Section 6 concludes the paper by summa-
rizing the work and suggesting future research direc-
tions.
2 BACKGROUND
In this section, we delve deeper into the background
of our research landscape, shedding light on crucial
aspects that underpin our exploration of Logic Tensor
Networks (LTN), path planning for autonomous vehi-
cles, and the CARLA simulator.
2.1 Logic Tensor Networks
Logic Tensor Networks (LTN) is a novel Neuro-
Symbolic Python framework that seamlessly com-
584
Elrasas, O., Ehab, N., Mansy, Y. and El Mougy, A.
Dynamic Path Planning for Autonomous Vehicles: A Neuro-Symbolic Approach.
DOI: 10.5220/0012374700003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 584-591
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

bines key properties of both neural networks (for
training on data) and symbolic logic (for logical
reasoning). Two versions of LTN have been pub-
lished—one using TensorFlow and the other using
PyTorch, the widely-used Python machine learning
frameworks. In Logic Tensor Network (LTN), the
framework utilizes a first-order logic knowledge base
with axioms, functions, predicates, or logical con-
stants. LTN employs logical axioms as a loss func-
tion, seeking solutions that maximally satisfy all the
knowledge base axioms (Badreddine et al., 2022).
Real Logic, a fully differentiable logical language
introduced by LTN, facilitates learning by ground-
ing elements of a first-order logic signature onto data
through neural computational graphs and first-order
fuzzy logic semantics. Grounding, defined by Real
Logic, involves mapping logical domain elements
(constants, variables, and logical symbols) to tensors,
enabling the incorporation of data and logic. LTN
converts Real Logic formulae into PyTorch or Tensor-
Flow computational graphs, depending on the version
used (Figure 1) (Badreddine et al., 2022).
Figure 1: Real Logic Computational Graphs (Badreddine
et al., 2022).
2.2 Path Planning for Autonomous
Vehicles
Path planning is vital for autonomous vehicles to nav-
igate safely and efficiently in complex environments,
prioritizing passenger comfort. It encompasses two
main types: local and global path planning. Local
path planning focuses on generating short-term tra-
jectories to avoid immediate obstacles, while global
path planning finds a path from the starting point
to the destination, considering long-term constraints
(Gonz
´
alez et al., 2015).
A popular local path planning approach is the Ar-
tificial Potential Field (APF) method, creating a vir-
tual potential field to guide the vehicle and avoid
obstacles. This method, widely used in robotics,
is also applied in autonomous vehicle path planning
(Gonz
´
alez et al., 2015). For global path planning,
the graph-based method represents the environment
as a graph and uses algorithms like Dijkstra’s or A* to
find the shortest path. Another method is the Rapidly-
exploring Random Tree (RRT) algorithm, which gen-
erates a tree-based search space for optimal path find-
ing (Gonz
´
alez et al., 2015).
Machine learning techniques like deep learn-
ing and reinforcement learning have recently en-
hanced both local and global path planning for au-
tonomous cars. These approaches, such as a super-
vised reinforcement learning-based method proposed
by Hebaish et al. (Hebaish et al., 2022), demonstrate
promising outcomes in navigating complex situations.
2.3 CARLA Simulator
The CARLA simulator, standing for Car Learning
to Act, is an open-source platform designed for test-
ing and validating autonomous driving systems in re-
search and development. Built on the Unreal Engine,
CARLA provides a realistic environment for algo-
rithm and model testing across various driving sce-
narios, featuring customizable elements such as ob-
stacles, autonomous traffic, and weather conditions
in different towns with complex layouts (Dosovitskiy
et al., 2017).
CARLA supports various sensors, including Li-
DAR, radar, collision detection, and RGBA cameras,
enabling simulation of diverse perception scenarios
and testing perception algorithms. Researchers, such
as Dworak et al. (Dworak et al., 2019), have utilized
CARLA to evaluate LiDAR object detection deep
learning architectures based on artificially generated
point cloud data from the simulator.
In addition to sensor support, CARLA allows
the integration of various control algorithms for au-
tonomous vehicles. For instance, Vlachos et al. (Vla-
chos and Lalos, 2022) proposed a cooperative control
algorithm for platooning using CARLA, demonstrat-
ing its effectiveness in different scenarios to improve
stability and fuel efficiency. CARLA has also been
extensively used in various research tasks, including
path planning, motion control, and behavior model-
ing. Hebaish et al. (Hebaish et al., 2022) tested their
supervised reinforcement learning-based path plan-
ning algorithm for autonomous driving in CARLA,
demonstrating its ability to generate safe and efficient
driving trajectories in complex scenarios.
3 RELATED WORK
In examining related work, it is observed that many
research papers proposing machine learning ap-
proaches for self-driving vehicles predominantly em-
ploy reinforcement learning. Sallab et al. (Sallab
et al., 2017) introduced a deep reinforcement learning
framework that handles partially observable scenarios
through recurrent neural networks. This framework
Dynamic Path Planning for Autonomous Vehicles: A Neuro-Symbolic Approach
585
integrates attention models, focusing on relevant in-
formation to reduce computational complexity on em-
bedded hardware. Effective in complex road curva-
tures and vehicle interactions, the framework demon-
strates maneuvering capabilities. Another example by
Zong et al. (Zong et al., 2017) utilizes reinforcement
learning for obstacle avoidance, incorporating vehi-
cle constraints and sensor information with a deep
deterministic policy gradients algorithm. Both tech-
niques, however, face challenges such as long train-
ing times for achieving acceptable reward scores and
a lack of crucial context in potentially life-threatening
situations. The features of Neuro-Symbolic Artifi-
cial Intelligence (AI), such as explainability and data-
efficiency, offer potential solutions to these draw-
backs.
Given that Neuro-Symbolic AI is a relatively new
research field, practical examples of its full potential
are limited. An application in healthcare, proposed
by Lavin et al. (Lavin, 2022), involves a probabilis-
tic programmed deep kernel learning tool predicting
cognitive decline in Alzheimer’s disease. Effective in
neurodegenerative disease diagnosis, the tool is spec-
ulated to perform well in other disease areas. This
work will utilize Neuro-Symbolic AI for path plan-
ning in self-driving vehicles to explore its potential
in this field, leveraging its advantages over other ma-
chine learning techniques.
4 A NEURO-SYMBOLIC PATH
PLANNER
This section delves into the architecture, implemen-
tation, and dataset generation for Neuro-Symbolic
models with the main aim of facilitating dynamic nav-
igation for autonomous vehicles in complex scenar-
ios.
4.1 System Design
In the CARLA simulator, vehicle control involves
three main parameters: throttle (ranging from 0 to 1),
brake (ranging from 0 to 1), and steer (ranging from
-1 to 1). The objective of the LTN models is to predict
these parameters continuously based on the current
situation and environment. To implement these mod-
els in CARLA and control the vehicle, a main script
is required to connect to the CARLA server, load the
map, and spawn the vehicle.
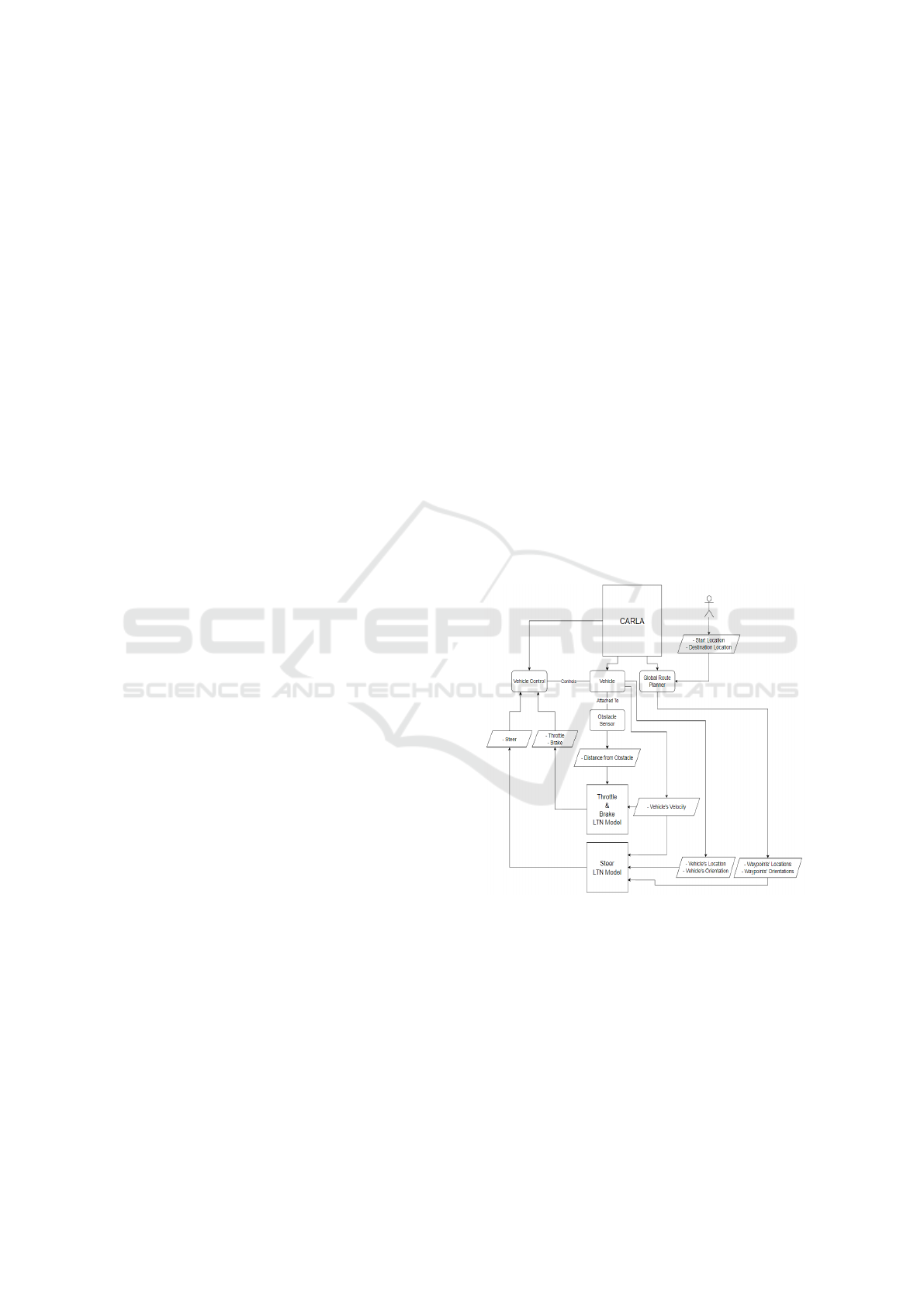
The project’s architecture, depicted in Figure 2,
comprises three main components: CARLA, the LTN
models, and the main script linking them together.
1. Route Planning: User-defined inputs, such as the
vehicle’s starting location and destination, initiate
CARLA’s global route planner. This planner cal-
culates an optimal route with a list of waypoints.
This stage occurs once at the script’s beginning.
2. Data Collection: Real-time information about
the vehicle and its environment is gathered in the
second stage. CARLA’s obstacle detection sensor
records distances to potential obstacles, while the
Python API retrieves details like speed, location,
orientation, and the next waypoint’s information
continuously.
3. Control and Prediction: The third stage involves
feeding the data collected in the second stage
into the Neuro-Symbolic LTN models. These
models predict throttle, brake, and steering com-
mands based on the current scenario using Neuro-
Symbolic techniques. The predictions control
the ego vehicle in CARLA continuously, ensur-
ing adaptability to unpredictable scenarios. The
models are trained on datasets captured within
CARLA, minimizing preprocessing and enhanc-
ing performance.
Figure 2: Detailed Architecture.
4.2 LTN Models Dataset Generation
Training data for both models was collected using
CARLA’s autopilot, and pandas was employed to
generate Comma-separated Values (CSV) files con-
taining the data. Pandas, a Python library designed
for data analysis, facilitates the conversion of reg-
ular Python arrays into pandas dataframes—a two-
dimensional data structure. These dataframes can
then be transformed into CSV files using pandas’ li-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
586

brary functions.
4.2.1 Throttle and Brake Model
The Python script for the throttle and brake model
in CARLA begins by loading town 10, a medium-
sized urban city map, chosen for its diverse traffic
scenarios. It spawns 100 Non-player character (NPC)
vehicles randomly across the map, with one desig-
nated as the ego vehicle for data collection. Utiliz-
ing CARLA’s autopilot function, the script config-
ures the ego vehicle to ignore traffic lights and abstain
from lane switching, ensuring dataset consistency. An
obstacle detection sensor, configured for a 30-meter
range and a hit radius matching the vehicle’s width,
captures dynamic obstacle information. The script
runs for 15 minutes, collecting data on obstacle dis-
tances, vehicle speed, and autopilot-controlled throt-
tle and brake values. The gathered data is stored in
an array, converted to a CSV file using pandas (see
section 4.2), and saved on disk.
4.2.2 Steer Model
In the steer model script, town 4, a large map with a
small town and a substantial highway, is selected to
emphasize extended lane following without distrac-
tions. Unlike the throttle and brake model, only the
ego vehicle is deployed, and CARLA’s world debug
function visualizes spawn point locations for suitable
routes.
No NPC vehicles are spawned to maintain dataset
clarity. CARLA’s autopilot trajectory being random
requires the use of CARLA’s vehicle Proportional-
Integral-Derivative (PID) controller class for trajec-
tory control. This class is instantiated with parame-
ters suitable for the chosen Tesla Model 3, allowing
precise route following.
The script involves traversing two lengthy routes
around the highway, collecting vehicle and waypoint
coordinates, yaw angles, and steering data. Dataset
precision is maintained by adjusting waypoint yaw
and approximating small steer values. The collected
data is stored in an array, converted to a CSV file us-
ing pandas, and saved on disk, following the approach
used for the throttle and brake model.
4.3 LTN Models Architecture and
Training
Both models, based on the PyTorch version of LTN
(LTN) known as LTNtorch, are Neuro-Symbolic re-
gression models utilizing an equality predicate for
training. This predicate measures similarity between
Figure 3: Spawn Points.
input tensors using the Euclidean similarity formula.
Eq(x, y) =
1
1 + 0.5 ∗
p
∑
i
(x
i
− y
i
)
2
(1)
The loss calculation involves a built-in aggregation
operator, subtracted from 1, utilizing the First-order
logic (FOL) ForAll quantifier for universal quantifica-
tion. Bound variables from the diagonal quantifier ex-
press statements about specific pairs of values, ensur-
ing accurate prediction of relationships between cor-
responding inputs and outputs in the CSV file. The
loss equation is described as follows.
Loss = 1.0 − SatAgg(Forall(diag(x, y), Eq( f (x), y)))
(2)
Both models use pandas for loading and shuffling
CSV file data, a dataloader for batching, and the
Adam optimizer as the chosen optimizer.
4.3.1 Throttle and Brake Model
For the throttle and brake model (Figure 4), the neu-
ral network comprises 2 input layers, 3 hidden layers,
and 2 output layers. The 2 input layers correspond
to distance and speed, while the 2 output layers cor-
respond to throttle and brake. The dataset, totaling
approximately 30,000 rows, is batched into 256-row
segments, with 85% allocated for training and 15%
for testing. The learning rate is set to 0.001, and train-
ing spans 100 epochs.
Figure 4: Throttle and Brake Model Neural Network.
Dynamic Path Planning for Autonomous Vehicles: A Neuro-Symbolic Approach
587
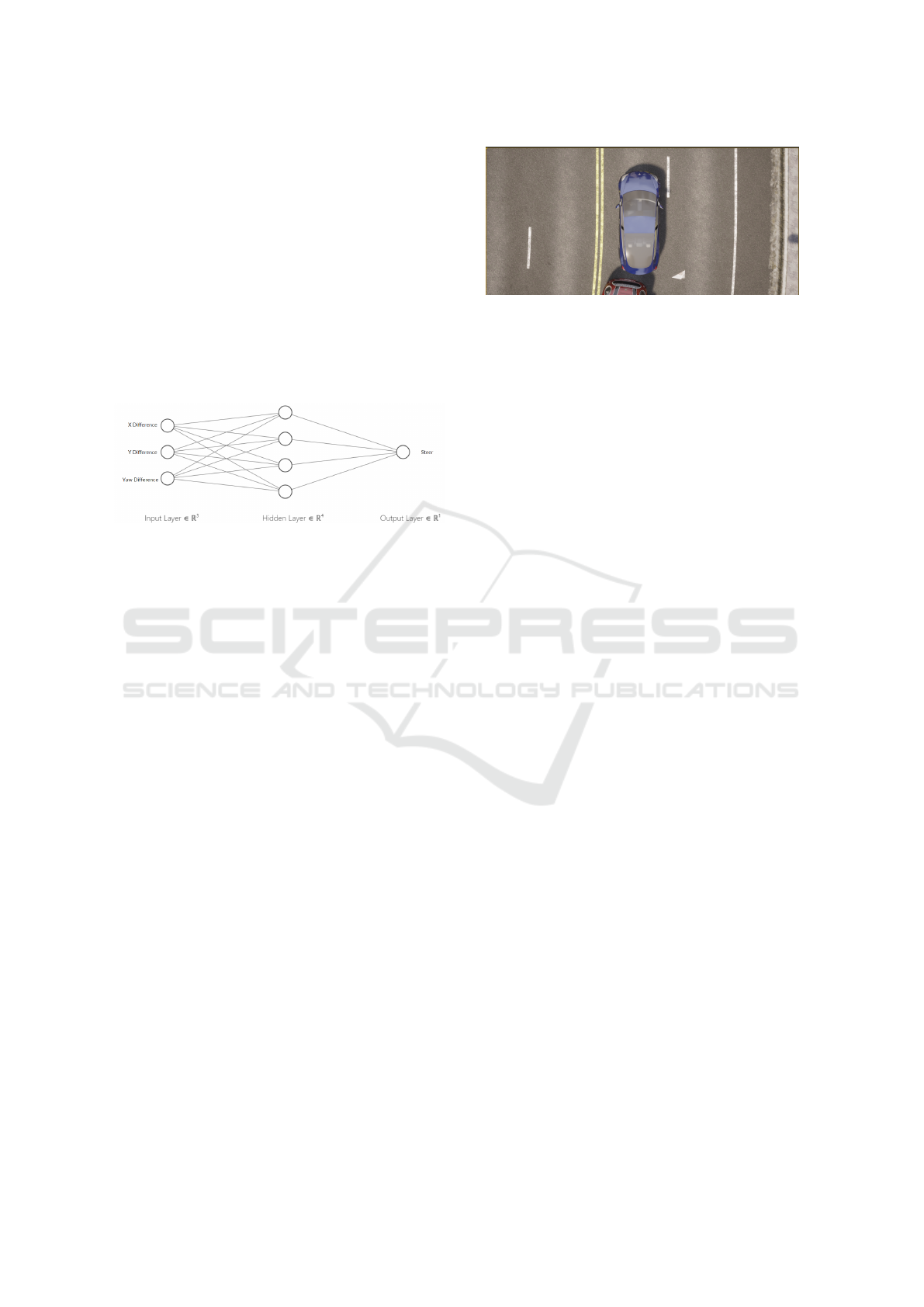
4.3.2 Steer Model
For the steer model (Figure 5), the neural network
comprises 3 input layers, 4 hidden layers, and 1 out-
put layer. The first two input layers capture the differ-
ence in x and y coordinates between the vehicle and
the waypoint, while the third input layer represents
the difference in yaw angle between the vehicle and
the waypoint. The single output layer corresponds
to steer. The dataset, totaling approximately 500,000
rows, is batched into segments of 19,000 rows, with
90% allocated for training and 10% for testing. The
learning rate is set to 0.001, and training spans 20
epochs.
Figure 5: Steer Model Neural Network.
Both LTN model scripts feature a function de-
signed for ease of use. This function takes necessary
inputs, processes them, and outputs the model’s pre-
dictions. The scripts commence by loading the CSV
files for the dataset, instantiating the predicates and
the neural network according to the specified architec-
ture. Subsequently, the training process begins. Once
trained, the models are ready for import and utiliza-
tion in the main script, as detailed in the next section
(4.4).
4.4 Main Script
CARLA operates on a client-server architecture, re-
quiring the creation of a Python script to connect
as a client to the running CARLA simulator server.
For this project, a local host connection was estab-
lished. Subsequently, both LTN models are imported
and instantiated. Town 10, chosen for its diversity and
medium size, is loaded for testing both models.
After loading the map, the user-specified spawn
location is used to spawn the ego vehicle, along with
the obstacle detection sensor. The spectator camera is
instantiated and transformed to hover over the vehicle,
providing the default camera view out of three im-
plemented views. The second camera view is a hood
view, and the third is a top view. As an example, the
top view can be seen in Figure 6.
Once the spectator camera is configured, 50 ad-
ditional NPC vehicles are spawned to create moder-
ate traffic in the map. Following the overview pro-
Figure 6: Top Camera View.
vided in section (4.1), the ego vehicle’s spawn point
and destination are determined, supplying the global
route planner with this information to generate the
list of waypoints. CARLA’s world debug function
is employed to draw these waypoints, ensuring accu-
rate tracking by the ego vehicle (Figure 3). Subse-
quently, the ego vehicle begins moving, continuously
invoking the functions in the LTN models to predict
throttle, brake, and steer using the necessary inputs.
The predicted outputs of the LTN models are then uti-
lized to control the ego vehicle through CARLA’s ve-
hicle control function, as explained in section (4.1).
This process continues until the ego vehicle reaches
the specified destination. Upon reaching the destina-
tion, CARLA’s destroy actor command removes all
spawned vehicles, concluding the simulation.
5 RESULTS AND DISCUSSION
This section outlines the evaluation metrics employed
to assess the effectiveness and efficiency of the
Neuro-Symbolic regression models. Additionally, a
comparative analysis of the results with other regres-
sion models is presented.
5.1 Evaluation Metrics
To highlight the advantages of employing our pro-
posed neuro-symbolic approach, a statistical linear re-
gression model is established as a benchmark, along-
side another regression model using XGBoost (Chen
and Guestrin, 2016), which is an efficient implemen-
tation of gradient boosting suitable for regression pre-
dictive modeling. Both models are created to fa-
cilitate a performance comparison with the Neuro-
Symbolic LTN models. To ensure a fair compari-
son, the linear regression model utilizes the same ma-
chine learning framework (PyTorch), neural network
architecture, optimizer, etc., as the Neuro-Symbolic
LTN models. Additionally, both the linear and XG-
Boost models share the same learning rate, number
of epochs, etc., as the Neuro-Symbolic LTN models.
The only distinction lies in the loss function, where
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
588

the linear and XGBoost models rely on the mean
squared error criterion, a common choice for regres-
sion models, as opposed to the Neuro-Symbolic LTN
models based on LTN predicates. Evaluation metrics
such as Root Mean Square Error (RMSE), alongside
training and prediction times, are utilized to assess the
models’ performance.
5.1.1 Root Mean Square Error
Also known as the standard error of regression, the
RMSE stands out as one of the most widely utilized
metrics for assessing the performance of machine
learning regression models. Recognized as a proper
scoring rule by Gneiting et al. (Gneiting and Raftery,
2007), it provides an intuitive measure of how far pre-
dictions deviate from actual measured values, with
lower RMSE values indicating superior performance.
The calculation of RMSE is expressed by the follow-
ing equation, where n represents the number of data
rows, y(i) is the i-th output, and ˆy(i) is its correspond-
ing prediction.
RMSE =
r
∑
n
i=1
||y(i) − ˆy(i)||
2
n
(3)
5.1.2 Training Time and Prediction Time
Training time refers to the duration required for the
model to complete all epochs and become prepared
for predictions, excluding the initial instantiation of
predicates and loading the CSV file. On the other
hand, prediction time is the duration taken by the
model to process an input and produce its prediction.
The RMSE and training time metrics are com-
puted for both Neuro-Symbolic LTN models and
compared to benchmark models across varying data
row sizes from the dataset. This analysis aims to
assess the models’ accuracy with different data vol-
umes, emphasizing one of Neuro-Symbolic AI’s key
advantages—data efficiency. Prediction time is com-
puted once at the end, with further details discussed
in the following section.
5.2 Results
5.2.1 Throttle and Brake Model RMSE
The RMSE of the throttle and brake LTN model and
both benchmark models was calculated while using
500, 1000, 2000, 5000, and 20000 data rows to train
the models, the following results in Figure 7, and 8
were observed.
Figure 7: Throttle and Brake RMSE Table Comparison.
Figure 8: Throttle and Brake RMSE Graph Comparison.
5.2.2 Steer Model RMSE
The RMSE of the steer LTN model and both bench-
mark models was calculated while using 50000,
125000, 250000, and 500000 data rows to train the
models, the following results in Figure 9, and 10 were
observed.
Figure 9: Steer RMSE Table Comparison.
Figure 10: Steer RMSE Graph Comparison.
5.2.3 Throttle and Brake Model Training Time
The training time of the throttle and brake LTN model
and both benchmark models was calculated while us-
ing 500, 1000, 2000, 5000, and 20000 data rows to
train the models, the following results in Figure 11,
and 12 were observed.
Dynamic Path Planning for Autonomous Vehicles: A Neuro-Symbolic Approach
589

Figure 11: Throttle and Brake Training Time Table Com-
parison.
Figure 12: Throttle and Brake Training Time Graph Com-
parison.
5.2.4 Steer Model Training Time
The training time of the steer LTN model and bench-
mark models was calculated while using 50000,
125000, 250000, and 500000 data rows to train the
models, the results in Figure 13, and 14 were ob-
served.
Figure 13: Steer Training Time Table Comparison.
Figure 14: Steer Training Time Graph Comparison.
5.3 Discussion
The outcomes presented in the preceding section sub-
stantiate one of the primary advantages of Neuro-
Symbolic AI—data efficiency. In contrast to the two
benchmark models, the Neuro-Symbolic LTN mod-
els exhibit notably lower RMSE values, particularly
when employing a smaller dataset. However, this effi-
ciency is accompanied by a trade-off: longer training
times, as elucidated in the ensuing discussion.
5.3.1 Throttle and Brake Model RMSE
As anticipated, Figures 7 and 8 illustrate that the
throttle & brake LTN model exhibits a 55.6% lower
RMSE than the linear model and a 12.1% lower
RMSE than the XGBoost model with a dataset size of
500 rows. Nevertheless, as the dataset size increases,
the disparity in RMSE between the throttle & brake
LTN model and the two benchmark models dimin-
ishes. For instance, with 1000 data rows, the LTN
model demonstrates a 6.9% reduction in RMSE com-
pared to the linear model and a 5.6% reduction com-
pared to the XGBoost model. While this reduction
may seem modest, it can hold significance in many
practical scenarios. The trend of diminishing differ-
ences is not consistent, as seen with a dataset size
of 2000 rows, where the RMSE difference expands
to 17.8% less than the linear model and 26.9% less
than the XGBoost model. However, as the dataset
size continues to grow from 2000 to 20000 rows, the
RMSE difference gradually decreases, becoming neg-
ligible between the LTN model and the linear model,
and reducing from 26.9% to 22.7% between the LTN
model and the XGBoost model.
5.3.2 Steer Model RMSE
In line with the results observed in the throttle &
brake model, Figures 9 and 10 underscore a signif-
icant divergence in RMSE between the LTN model
and the two benchmark models. Commencing with
the 50,000 data rows dataset, the steer LTN model ex-
hibits a 65.2% reduction in RMSE compared to the
linear model and a substantial 79.1% reduction com-
pared to the XGBoost model. Similar to the pattern
seen with the linear model in the throttle & brake
model results, the gap gradually narrows when using
125,000 data rows. The LTN model displays a 49.2%
reduction in RMSE compared to the linear model, but
this difference increases again to 68% with 250,000
data rows. Subsequently, the difference gradually de-
creases until it becomes negligible for the expected
output of this model.
Unlike the throttle & brake model, the XGBoost
model performs poorly in the steer model compared
to the other two models, exhibiting a substantial dif-
ference in RMSE. This discrepancy suggests that the
XGBoost regression model’s performance is subopti-
mal when the number of epochs is relatively low, as
in the steer model, where it only undergoes training
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
590

for 20 epochs to expedite the process due to the larger
dataset size compared to the throttle & brake dataset.
5.3.3 Training Time
As anticipated, the training time for the LTN models
is longer than that of the benchmark models. Figures
11, 12, 13, and 14 illustrate that the training time for
the LTN models exceeds that of the linear model by an
average of 41.8% in the throttle & brake model and an
average of 19.8% in the steer model, with the differ-
ence generally increasing as the dataset grows larger.
A similar trend is observed for the XGBoost model,
where the LTN model’s training time surpasses that
of the XGBoost model by an average of 81.5% in the
throttle & brake model and an average of 61.5% in
the steer model. The longer training time for the LTN
models is expected due to the additional steps in the
LTN framework, as outlined in Section 2.1, which are
necessary to calculate the loss function described in
Section 4.3.
6 CONCLUSION AND FUTURE
WORK
The paper aims to implement a practical application
for Neuro-Symbolic AI in dynamic path planning
for autonomous vehicles. Two Logic Tensor Net-
work (LTN) regression models were developed us-
ing the Neuro-Symbolic paradigm—one for control-
ling throttle and brake parameters, and another for
steering. These models were tested and evaluated in
the CARLA simulator, demonstrating effective vehi-
cle control in complex scenarios.
The Neuro-Symbolic models were then compared
with a linear regression model and an XGBoost re-
gression model using similar datasets and configu-
rations. Evaluation metrics, including Root Mean
Square Error and training time, were employed to
assess model performance. Results indicated a sig-
nificant improvement in the RMSE of the Neuro-
Symbolic models, particularly with smaller datasets.
However, this enhancement came at the expense of
longer training times compared to the linear and XG-
Boost models.
Limitations were encountered during develop-
ment, due to the computational demands of the
CARLA simulator, necessitating a constraint on the
number of simulated vehicles. Future studies should
explore additional Neuro-Symbolic features, such as
explainability, to enhance the analysis of decision-
making processes and provide drivers with valuable
insights. Additionally, it is worth delving deeper into
the symbolic aspects of Neuro-Symbolic AI, incor-
porating diverse predicates to further refine decision-
making by enforcing specific rules.
REFERENCES
Badreddine, S., Garcez, A. d., Serafini, L., and Spranger, M.
(2022). Logic tensor networks. Artificial Intelligence,
303:103649.
Chen, T. and Guestrin, C. (2016). Xgboost: A scalable
tree boosting system. In Proceedings of the 22nd acm
sigkdd international conference on knowledge discov-
ery and data mining, pages 785–794.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning.
Dworak, D., Ciepiela, F., Derbisz, J., Izzat, I., Ko-
morkiewicz, M., and W
´
ojcik, M. (2019). Perfor-
mance of lidar object detection deep learning architec-
tures based on artificially generated point cloud data
from carla simulator. In 2019 24th International Con-
ference on Methods and Models in Automation and
Robotics (MMAR), pages 600–605.
Gneiting, T. and Raftery, A. E. (2007). Strictly proper scor-
ing rules, prediction, and estimation. Journal of the
American statistical Association, 102(477):359–378.
Gonz
´
alez, D., P
´
erez, J., Milan
´
es, V., and Nashashibi, F.
(2015). A review of motion planning techniques for
automated vehicles. IEEE Transactions on intelligent
transportation systems, 17(4).
Hebaish, M. A., Hussein, A., and El-Mougy, A. (2022).
Supervised-reinforcement learning (srl) approach for
efficient modular path planning. In 2022 IEEE 25th
International Conference on Intelligent Transporta-
tion Systems (ITSC), pages 3537–3542. IEEE.
Lavin, A. (2022). Neuro-symbolic neurodegenerative dis-
ease modeling as probabilistic programmed deep ker-
nels. In AI for Disease Surveillance and Pandemic
Intelligence: Intelligent Disease Detection in Action,
pages 49–64. Springer.
Sallab, A. E., Abdou, M., Perot, E., and Yogamani,
S. (2017). Deep reinforcement learning frame-
work for autonomous driving. arXiv preprint
arXiv:1704.02532.
Sarker, M. K., Zhou, L., Eberhart, A., and Hitzler, P. (2021).
Neuro-symbolic artificial intelligence. AI Communi-
cations, 34(3):197–209.
Vlachos, E. and Lalos, A. S. (2022). Admm-based coop-
erative control for platooning of connected and au-
tonomous vehicles. In ICC 2022 - IEEE International
Conference on Communications, pages 4242–4247.
Zong, X., Xu, G., Yu, G., Su, H., and Hu, C. (2017). Obsta-
cle avoidance for self-driving vehicle with reinforce-
ment learning. SAE International Journal of Passen-
ger Cars-Electronic and Electrical Systems, 11(07-
11-01-0003):30–39.
Dynamic Path Planning for Autonomous Vehicles: A Neuro-Symbolic Approach
591
