
Multi-View Inversion for 3D-aware Generative Adversarial Networks
Florian Barthel
1,2 a
, Anna Hilsmann
2 b
and Peter Eisert
1,2 c
1
Humboldt Universit
¨
at zu Berlin, Berlin, Germany
2
Fraunhofer HHI, Berlin, Germany
fl
Keywords:
3D GAN Inversion, Multi-View Inversion, Multi-Latent Inversion.
Abstract:
Current 3D GAN inversion methods for human heads typically use only one single frontal image to recon-
struct the whole 3D head model. This leaves out meaningful information when multi-view data or dynamic
videos are available. Our method builds on existing state-of-the-art 3D GAN inversion techniques to allow for
consistent and simultaneous inversion of multiple views of the same subject. We employ a multi-latent exten-
sion to handle inconsistencies present in dynamic face videos to re-synthesize consistent 3D representations
from the sequence. As our method uses additional information about the target subject, we observe significant
enhancements in both geometric accuracy and image quality, particularly when rendering from wide viewing
angles. Moreover, we demonstrate the editability of our inverted 3D renderings, which distinguishes them
from NeRF-based scene reconstructions.
1 INTRODUCTION
With recent advancements in 3D-aware image syn-
thesis using NeRF-based Generative Adversarial Net-
works (GANs) (Gu et al., 2021; Chan et al., 2020;
Chan et al., 2021), multiple methods have been pro-
posed to re-synthesize 3D renderings for given target
images using GANs (Xie et al., 2023; Xia et al., 2022;
Richardson et al., 2021; An et al., 2023). This process
called 3D GAN inversion typically uses a single in-
put image to reconstruct / invert a 3D representation.
3D GAN inversion methods are especially popular as
they facilitate object editing and manipulation of ob-
ject attributes, such as shape, texture, or pose.
In this process, a target image is first inverted, by
optimizing a location in the latent space of the GAN
that re-synthesizes the input image. Subsequently, the
output image can be manipulated using methods like
GAN-Control (Shoshan et al., 2021) or GANSpace
(H
¨
ark
¨
onen et al., 2020). This opens up a wide range
of possible applications for various industries.
When inverting human face images, the input tar-
get image usually shows the head from a frontal view.
This specific viewpoint provides the inversion method
with a substantial amount of information about the
person’s identity and important cues related to the
a
https://orcid.org/0009-0004-7264-1672
b
https://orcid.org/0000-0002-2086-0951
c
https://orcid.org/0000-0001-8378-4805
coarse geometry. However, it misses a significant
amount of details that are only visible from other
viewing directions. This leads to inaccurate represen-
tations for large viewing angles, as the GAN has to
extrapolate information from training data to cover re-
gions that are not visible in the target image. In addi-
tion, to reconstruct the geometry of a given face from
a frontal viewpoint, the inversion method has to rely
on the silhouette, shading, and shadows, which might
be ambiguous under certain conditions.
To overcome the mentioned limitations, we
present a novel 3D GAN inversion method that allows
to re-synthesize consistent 3D representations from
multiple views at once. Only using a short video clip,
showing a head turning from one side to the other,
we are able to reconstruct an accurate 3D re-synthesis
from arbitrary viewing angles. We show that our
method significantly improves the geometry and es-
pecially the image quality when rendering from large
viewing angles, compared to prior 3D GAN inversion
methods. We compare our method to state-of-the-art
3D GAN inversion methods, outperforming them in
terms of reconstruction quality, and demonstrate edit-
ing capabilities of the consistent representation.
Our project page can be found here: https://
florian-barthel.github.io/multiview-inversion.
194
Barthel, F., Hilsmann, A. and Eisert, P.
Multi-View Inversion for 3D-aware Generative Adversarial Networks.
DOI: 10.5220/0012371000003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
194-203
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORK
2.1 3D-Aware GANs
Following the success of the StyleGAN model for 2D
image synthesis (Karras et al., 2019; Karras et al.,
2020; Karras et al., 2021), numerous architectures
have been developed to enable 3D-aware image syn-
thesis using StyleGAN as the backbone (Niemeyer
and Geiger, 2021; Shi et al., 2021; Chan et al., 2020;
Brehm et al., 2022). The Efficient Geometry-aware
3D GAN (EG3D) (Chan et al., 2021) stands out in
particular due to its high resolution and good image
quality. EG3D uses a StyleGAN2 generator to synthe-
size 2D features, which are then orthogonally aligned
in a 3D space. From this structure, called Tri-Plane,
rays can be computed using a NeRF renderer (Barron
et al., 2021) to create novel 3D views with consistent
geometry.
2.2 2D GAN Inversion
GAN inversion seeks to identify the precise latent
location in the latent space or generator configuration
that best re-synthesizes a particular target image.
Generally, GAN inversion methods can be separated
into three groups: optimization-based, encoder-
based, and hybrid approaches.
Optimization. For optimization-based methods, a la-
tent vector z ∈ Z is optimized with the goal of syn-
thesizing an image that closely resembles the target
image. This can be done via gradient descent using
differentiable loss functions. These loss functions can
range from simple pixel-wise L
1
or L
2
losses to more
complex perceptual losses, such as the LPIPS dis-
tance (Zhang et al., 2018) or an ID loss (Deng et al.,
2019a). Starting from a random latent vector z, the
position is optimized as follows:
z
n+1
= z
n
− α
d
dz
n
L(G(z
n
), t). (1)
Here, α, G and t denote the learning rate, the gen-
erator and the target image, respectively. L describes
the loss function that measures the image similarity.
Specifically for StyleGAN inversion, it is common
to optimize a latent vector within the W space. This
latent space is created by StyleGAN’s mapping net-
work. Compared to the input space Z it is less en-
tangled, which means that similar output images have
close spatial locations in W . This helps the inversion
process, as the update steps have a more guided direc-
tion towards the target.
Recent studies (Abdal et al., 2019; Abdal et al.,
2020) also show that optimization in the W + space
can improve the inversion quality even further. W +
describes the W space with additional block-wise
modifications, i.e., W + inversion directly optimizes
the input for each StyleGAN block separately. This
provides considerably more parameters, facilitating
an accurate inversion.
Encoder. Encoder-based inversion methods such as
(Deshmukh and Bhat, 2022; Perarnau et al., 2016;
Bau et al., 2019a; Richardson et al., 2021) trade
pre-training time for inference time by previously
training an encoder on the latent space. This results in
an image-to-image architecture, where a target image
is first mapped to the latent space and afterwards
re-synthesized by the generator. This enables real
time GAN inversion, whereas optimization-based
methods can take up several minutes for one target
image. While optimization-based methods generally
show better results than encoder-methods, some
recent methods (Bhattarai et al., 2023) achieve
equivalent results by also predicting an offset for the
generator weights.
Hybrid. Finally, multiple methods (Zhu et al., 2016;
Bau et al., 2019b; Zhu et al., 2020) have combined
both optimization- and encoder-based inversion meth-
ods. In such a case, a target image is first encoded into
the latent space and then the resulting latent vector is
further optimized via gradient descent. Depending on
the use case, hybrid methods can yield a good trade-
off between inversion quality and computing time.
2.3 Pivotal Tuning Inversion
After finding the location of a latent vector that re-
synthesizes the target image, it can be beneficial to
fine-tune the generator weights θ with respect to the
target image. This method called Pivotal Tuning In-
version (PTI) (Roich et al., 2021) simultaneously im-
proves the similarity to the target, while also improv-
ing the editability. Similarly to the equation (1), PTI
can be expressed as follows:
θ
n+1
= θ
n
− α
d
dθ
n
L(G(z;θ
n
), t). (2)
2.4 3D GAN Inversion
Given a 3D-aware GAN model, we can apply all the
aforementioned 2D GAN inversion methods to per-
form 3D GAN inversion. For instance, PanoHead (An
et al., 2023) uses W + inversion followed by PTI to
Multi-View Inversion for 3D-aware Generative Adversarial Networks
195
successfully reconstruct a target image. Another re-
cent method is TriplaneNet (Bhattarai et al., 2023),
which learns an encoder network to predict both a la-
tent vector and offsets for the generator weights to
produce state-of-the-art 3D GAN inversions. Other
methods, such as (Yin et al., 2022) or (Xie et al.,
2023), first generate multiple pseudo views from one
single target and then perform optimization on the real
and the synthesized images simultaneously.
2.5 Video to 3D Representation
With the growing popularity of 3D scene reconstruc-
tion using NeRFs, multiple works (Park et al., 2021a;
Park et al., 2021b; Xu et al., 2023) have attempted 3D
reconstruction from dynamic videos. One of the most
popular methods is HyperNeRF (Park et al., 2021b).
It learns a high dimensional deformation field for the
rays inside NeRF’s renderer. This enables a consistent
3D reconstruction from dynamic data as all inconsis-
tencies can be compensated by the deformation field.
TriplaneNet (Bhattarai et al., 2023) proposes an-
other video to 3D method, where each frame is in-
verted separately using an encoder-based 3D GAN
inversion method. However, instead of returning one
consistent 3D model, TriplaneNet’s approach returns
a separate model for each frame.
Our approach differs from both aforementioned
methods. Instead of applying a NeRF-based scene re-
construction algorithm, we invert a 3D-aware GAN,
i.e. the EG3D (Chan et al., 2021). This enables us to
edit the re-synthesized image afterwards. Contrary to
TriplaneNet’s video to 3D approach, our method re-
turns one coherent 3D model that yields good inver-
sion quality from all viewing angles, instead of syn-
thesizing one representation for each frame.
Our main contributions in this paper are:
• a multi-view inversion optimization algorithm for
synthesizing consistent 3D renderings using mul-
tiple viewpoints simultaneously,
• a multi-latent inversion optimization algorithm to
improve 3D inversion capabilities when utilizing
dynamic videos,
• three consistency regularization methods for im-
proving the multi-latent optimization.
3 METHOD
For our consistent multi-view GAN inversion method,
we chose to use an optimization-based approach. This
decision has two reasons. (i) We focus on inversion
quality, rather than computing time; and (ii) it makes
our method applicable to any 3D-aware GAN, regard-
less of the training data, and without any prior training
of an encoder network.
Our method consists of two parts. First, we pro-
pose a multi-view inversion method, where we build
on existing GAN inversion methods to be applicable
to multiple target images, creating consistent repre-
sentations across views (section 3.1). Afterwards, we
fine-tune multiple latent vectors, each responsible for
a certain viewing angle, to account for small dynamic
inconsistencies in a dynamic input video sequence
(section 3.2).
3.1 Multi-View Optimization
Given a target video of a human face, we sample N
target frames equally distributed from the leftmost to
the rightmost camera perspective. To do so, we esti-
mate all camera parameters using the algorithm from
(Deng et al., 2019b), and select frames that are closest
to precomputed directions.
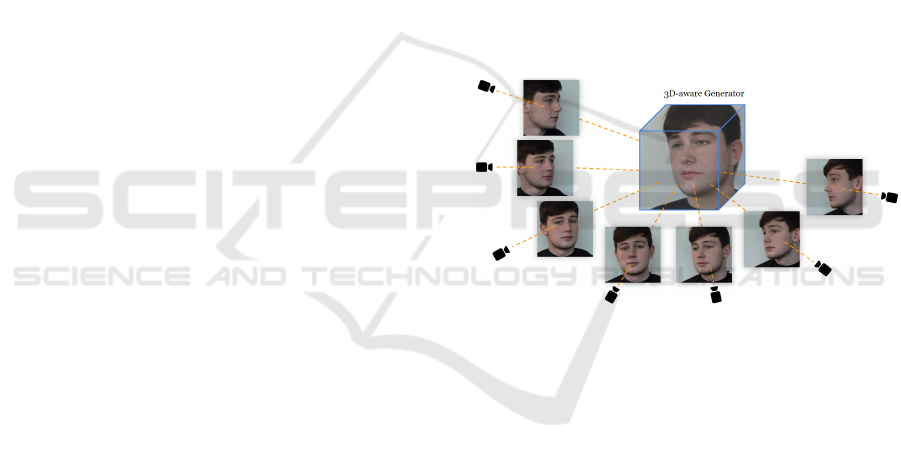
Figure 1: Example Multi-view optimization using 7 targets.
Using the target frames from all N different views,
we perform a W + optimization (Abdal et al., 2019)
for all targets simultaneously. This is achieved by ac-
cumulating the gradients for all targets with respect
to multiple loss terms and optimizing a single latent
vector w ∈ W + using gradient descent. The loss
functions we use are as follows: a perceptual loss L
P
(Zhang et al., 2018), a L
2
pixel loss, an ID loss (Deng
et al., 2019a) and a regularization term L
r
(An et al.,
2023) that prevents the latent vector w to diverge from
the average latent vector in W +. Altogether, this re-
sults in the following combined loss term:
L =
N
∑
i
λ
P
L
i
P
+ λ
2
L
i
2
+ λ
r
L
i
r
+ λ
ID
L
i
ID
. (3)
After optimizing N separate latent vectors in W +,
we perform PTI using multiple targets. Analogously
to W + optimization, we accumulate the gradients for
all N views and then fine-tune the weights of the gen-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
196
erator. We apply the same loss function, however,
without the L
r
regularization.
Altogether, our multi-view optimization can be
summarized with the following three steps:
1. sample N target images with evenly spaced cam-
era angles from a face video,
2. perform W + optimization with all N target im-
ages simultaneously using gradient accumulation,
3. perform PTI with all N target images.
3.2 Multi-Latent Optimization
When capturing a video sequence for 3D face re-
construction, it is advisable to minimize facial move-
ments. Nevertheless, slight movements are unavoid-
able, e.g. at the eyes or the jaw. This causes conflicts
when seeking a single consistent 3D representation
that matches all different poses. To address this prob-
lem, we introduce a multi-latent optimization process
that simultaneously optimizes different latent vectors
for different views. To achieve this, we first optimize
a single latent vector as described in section 3.1. Sub-
sequently, we use the resulting vector to initialize M
new latent vectors w
i
∈ W +. These latent vectors are
then optimized separately, one for each viewpoint, us-
ing the same loss formulation as in section 3.1. Also,
we also use PTI afterwards. I.e. we optimize the gen-
erator weights.
During inference, we interpolate between all fine-
tuned latent vectors based on the camera angle.
Specifically, we select the two latent vectors, w
1
and
w
2
, with the closest distance to the camera and apply
linear interpolation in-between.
I = G(lerp(w
1
, w
2
, c
angle
), c) (4)
Here, c denotes the camera parameters during in-
ference, whereas c
angle
describes the normalized an-
gle between c
1
and c
2
, which are the camera parame-
ters of w
1
and w
2
respectively.
With this approach, we facilitate the inversion
process by eliminating the need to identify a single
latent vector that represents all views simultane-
ously. This can be a challenging task, particularly
for inconsistent input images from dynamic face
videos. On the other hand, however, as all M latent
vectors are optimized independently, we have to deal
with sudden changes when interpolating in-between
neighboring latent vectors. To ensure seamless
transitions, we apply three regularization methods,
i.e. a latent distance regularization, an interpolation
regularization and a depth regularization, which are
explained below.
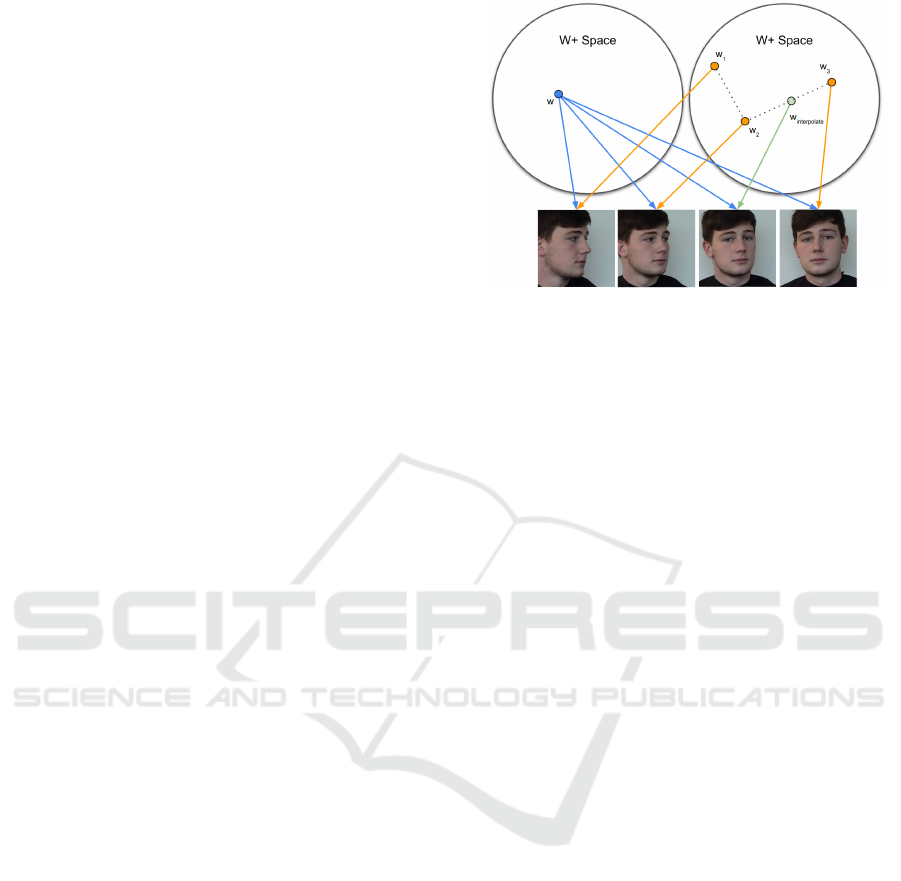
Figure 2: An illustration, highlighting the key difference be-
tween single-latent optimization (left) and multi-latent op-
timization (right). To transition between latent vectors, we
apply linear interpolation in W +.
Latent Distance Regularization. To preserve coher-
ence, we incorporate a regularization term that penal-
izes the L
2
distance between all M optimized vectors
and the initial vector.
L
dist
=
M
∑
i=1
∥w
i
− w
init
∥
2
(5)
This way, all latent codes are enforced to remain
in close proximity to one another, thereby reducing
the probability for traversing unknown regions when
interpolating during inference.
Interpolation Regularization. To improve the
image quality along the interpolation paths, we
also optimize interpolated views during inversion.
For this purpose, we sample a new latent vector
centered between two adjacent latent vectors. Given
this interpolated vector, we synthesize an image
and apply a gradient step with respect to the loss
functions mentioned in section 3.1. As we create
the intermediate vectors using linear interpolation,
we simultaneously optimize the position of both
neighboring latent vectors. This implicitly creates
a relation between all viewing points, similar to a
doubly linked list. Visually, this is illustrated in figure
2, where the green dot represents the interpolated
vector centered in-between w
2
and w
3
. Using this
vector for optimization, implicitly optimizes w
2
and
w
3
. As all neighboring vectors have to cooperate
so that their interpolated vector yields good inver-
sion quality, we expect that this approach enforces
smoother interpolation paths.
Depth Regularization. Finally, we add a regulariza-
tion term to enforce the consistency of the geometry.
As we allow each latent vector at each viewpoint to
be unique, the geometry might show sudden changes
Multi-View Inversion for 3D-aware Generative Adversarial Networks
197

when rotating during inference. In order to avoid such
effects, we add a regularization that compares the
depth maps for M latent vectors when viewed from
the same camera position. Specifically, we first cal-
culate the average depth map for every camera view-
point c
i
when synthesized with all M latent vectors.
Subsequently, the resulting average depth map for ev-
ery camera viewpoint c
i
is then compared to the cor-
responding depth map created by the i-th latent vector
w
i
using MSE. If all depth maps are the same, this loss
returns 0. This can be formalized as follows:
L
i
depth
= ∥G
depth
(w
i
, c
i
) −
1
M
M
∑
j=1
G
depth
(w
j
, c
i
)∥
2
(6)
Here, G
depth
denotes the differentiable depth im-
age, synthesized by the generator. In summary, multi-
latent optimization follows three steps:
1. perform multi-view optimization to initialize M
latent vectors,
2. optimize each latent vector separately for a spe-
cific viewpoint using the consistency regulariza-
tion methods,
3. fine-tune the weights of the generator using PTI,
with respect to all M latent vectors.
4 EXPERIMENTS
4.1 Configuration
The configuration for our experiments closely follows
the 3D inversion implementation of (An et al., 2023).
In particular, we optimize the latent vector for 500 it-
erations using a decaying learning rate starting from
0.1. We have also performed longer experiments with
more optimization steps; however, they do not show
better results. To weight our four loss functions, we
set λ
p
= 1.0, λ
2
= 0.1, λ
r
= 1.0 and λ
ID
= 1.0. In or-
der to initialize the latent vectors for our multi-latent
experiments, we use a prior multi-view optimization
with seven target views.
In all experiments, we use an EG3D (Chan et al.,
2021) generator that was pre-trained on the large-pose
Flickr face (LPFF) dataset (Wu et al., 2023). Com-
pared to FFHQ (Karras et al., 2018), LPFF adds addi-
tional images from large viewing angles, which facil-
itate 3D inversion from multiple views. For the com-
parisons with TriplaneNet, HFGI3D and SPI, how-
ever, we follow the official implementations, which
use FFHQ.
4.2 Data
For our face videos, we use a dataset that imitates
UK police lineup videos (Colloff et al., 2022). Those
videos show a person turning their head from one side
to the other. For six videos, we extract all frames
and perform the same data pre-processing as in (Chan
et al., 2021).
4.3 Metrics
In order to validate the performance of our inversion
method, we apply the following four commonly used
metrics: MSE, LPIPS (Zhang et al., 2018), MS-SSIM
(Wang et al., 2003) and ID similarity (Deng et al.,
2019a). Instead of only comparing the frontal views,
we select 180 target frames with evenly distributed
viewing angles across the maximal range and calcu-
late the average score, respectively. We will refer to
those rotation metrics as MSE
R
, LPIPS
R
, MS-SSIM
R
and ID
R
.
4.4 Quantitative Results
We compare our results to three state-of-the-art 3D
GAN inversion methods, i.e. W + inversion (Abdal
et al., 2019), PTI (Roich et al., 2021), TriplaneNet
(Bhattarai et al., 2023), HFGI3D (Xie et al., 2023)
and SPI (Yin et al., 2022)
In the following, we will first examine the results
of the single-view 3D inversion, which only uses a
frontal face image to reconstruct a 3D model. After
that we will demonstrate the results when applying
our multi-view inversion method that optimizes
a single latent vector for multiple target views
simultaneously. And finally, we will demonstrate the
results of our multi-latent inversion method, in which
we optimize multiple latent vectors, one for each
viewpoint, separately.
Single-View. As expected, the single-view experi-
ments perform very well for all methods, when it
comes to synthesizing the face from a frontal view-
point. Here, we find the overall best performance us-
ing PTI. However, for the evaluation of rotated views,
the rotation metrics show considerably worse perfor-
mance. This underlines that single-view 3D GAN in-
version misses significant information to reconstruct
the true geometry of a face. In figure 3, we plot the
ID similarity against the viewing angle of the camera.
For the single-view PTI experiment (blue line), we
observe the highest ID similarity at the frontal view,
whereas the similarity decreases as soon as we rotate
the camera in either direction.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
198
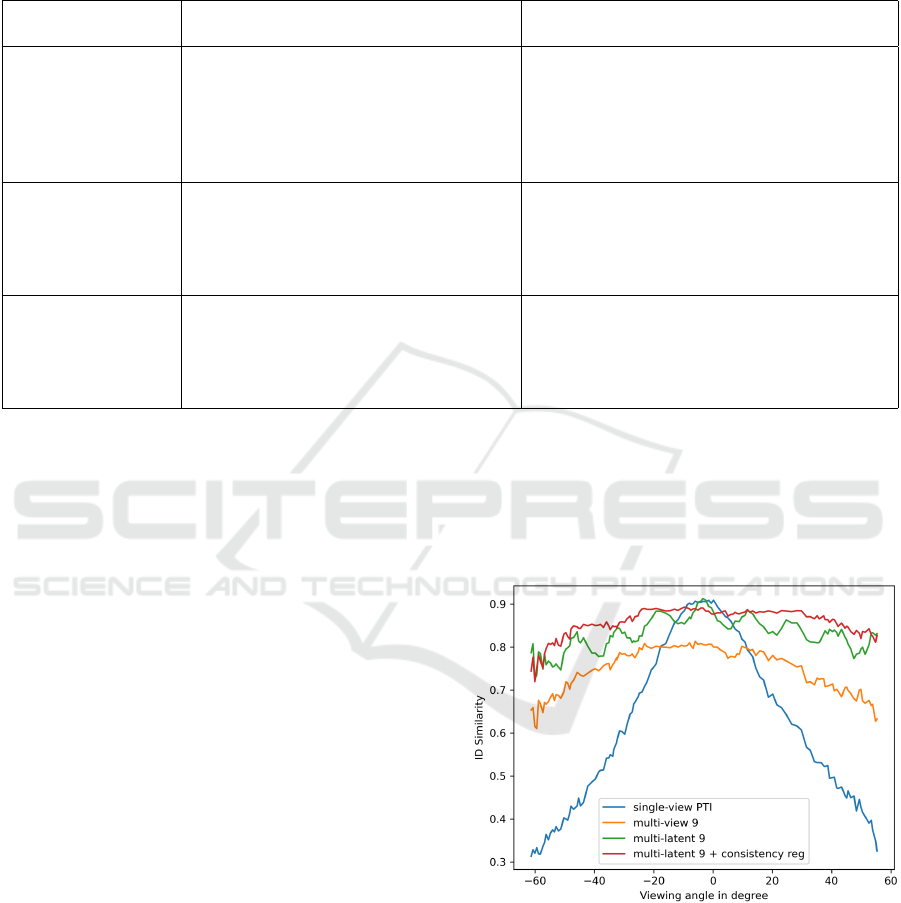
Table 1: Quantitative comparison between single-view, multi-view and multi-latent inversion. All metrics on the left only
consider the frontal image and all rotation metrics on the right are averaged over 180 images, ranging from the lowest viewing
angle to the highest. We average our results over all six face videos from the dataset (Colloff et al., 2022). We compare
our results to five single-view inversion methods: W + inversion (Abdal et al., 2020), PTI (Roich et al., 2021), TriplaneNet
(Bhattarai et al., 2023), HFGI3D (Xie et al., 2023), and SPI (Yin et al., 2022).
Single-view Metrics Multi-view Metrics
Method MSE ↓ LPIPS ↓ MS-SSIM ↑ ID ↑ MSE
R
↓ LPIPS
R
↓ MS-SSIM
R
↑ ID
R
↑
Single-view
W + Opt 0.008 0.16 0.92 0.68 0.071 0.37 0.74 0.45
PTI 0.002 0.08 0.97 0.93 0.075 0.36 0.75 0.62
TriplaneNet 0.005 0.22 0.96 0.90 0.128 0.45 0.52 0.69
HFGI3D 0.004 0.17 0.94 0.68 0.155 0.39 0.66 0.44
SPI 0.016 0.14 0.90 0.95 0.073 0.37 0.74 0.65
Multi-view (ours)
3 Views 0.014 0.18 0.88 0.68 0.045 0.29 0.79 0.61
5 Views 0.018 0.19 0.89 0.73 0.024 0.24 0.85 0.68
7 Views 0.016 0.18 0.89 0.78 0.022 0.22 0.87 0.73
9 Views 0.014 0.17 0.90 0.80 0.021 0.21 0.88 0.75
Multi-latent (ours)
9 Latents 0.007 0.15 0.94 0.89 0.010 0.19 0.92 0.83
+ Dist. Reg 0.008 0.15 0.94 0.87 0.010 0.19 0.92 0.82
+ Inter. Reg 0.007 0.14 0.95 0.88 0.009 0.18 0.93 0.85
+ Depth Reg 0.007 0.14 0.95 0.88 0.009 0.18 0.93 0.86
Multi-View. The results of the multi-view experi-
ments, on the other hand, are contrary to the single-
view results. The rotation metrics score significantly
better, although at the cost of single-view quality.
This can also be seen in the ID similarity graph in
figure 3 (orange line). Here, we observe worse qual-
ity when generating a frontal view, compared to the
single-view experiment. However, for angles that are
more than 20 ° apart from the center, the ID similarity
is improved.
In our experiments, we test the multi-view in-
version with different amounts of target images N.
Generally, we find that both single-view metrics and
rotation metrics favor experiments with more target
images. This is shown in table 1.
Multi-Latent. Using our multi-latent optimization,
the algorithm does not have to identify a single latent
vector that best represents all views simultaneously.
As highlighted in table 1, this results in the overall
best inversion quality for the rotation metrics. Addi-
tionally, the single-view metrics show results similar
to those of the single-view optimization experiments.
As demonstrated in figure 3 (red line), we observe the
highest ID similarity throughout a full rotation.
In figure 3 (green graph), we also compare the
multi-latent experiment without any consistency reg-
ularization. Here, we observe a spike at every lo-
cation for which we provided the optimization algo-
rithm with a target image. This is no longer the case
after applying all our three consistency regularization
methods. Instead, we observe a smooth and consistent
quality distribution. This underlines that the regular-
ization methods help to improve the inversion quality
along the interpolated paths in-between neighboring
latent vectors.
Figure 3: Average ID similarity across all camera view-
points (higher is better). At 0°, the face is shown from a
frontal view.
All ID similarity curves in figure 3 show slightly
worse inversion quality when the viewing angle
moves from the center. We believe that this is due
to the training data distribution, which includes more
faces from a frontal viewpoint.
Multi-View Inversion for 3D-aware Generative Adversarial Networks
199
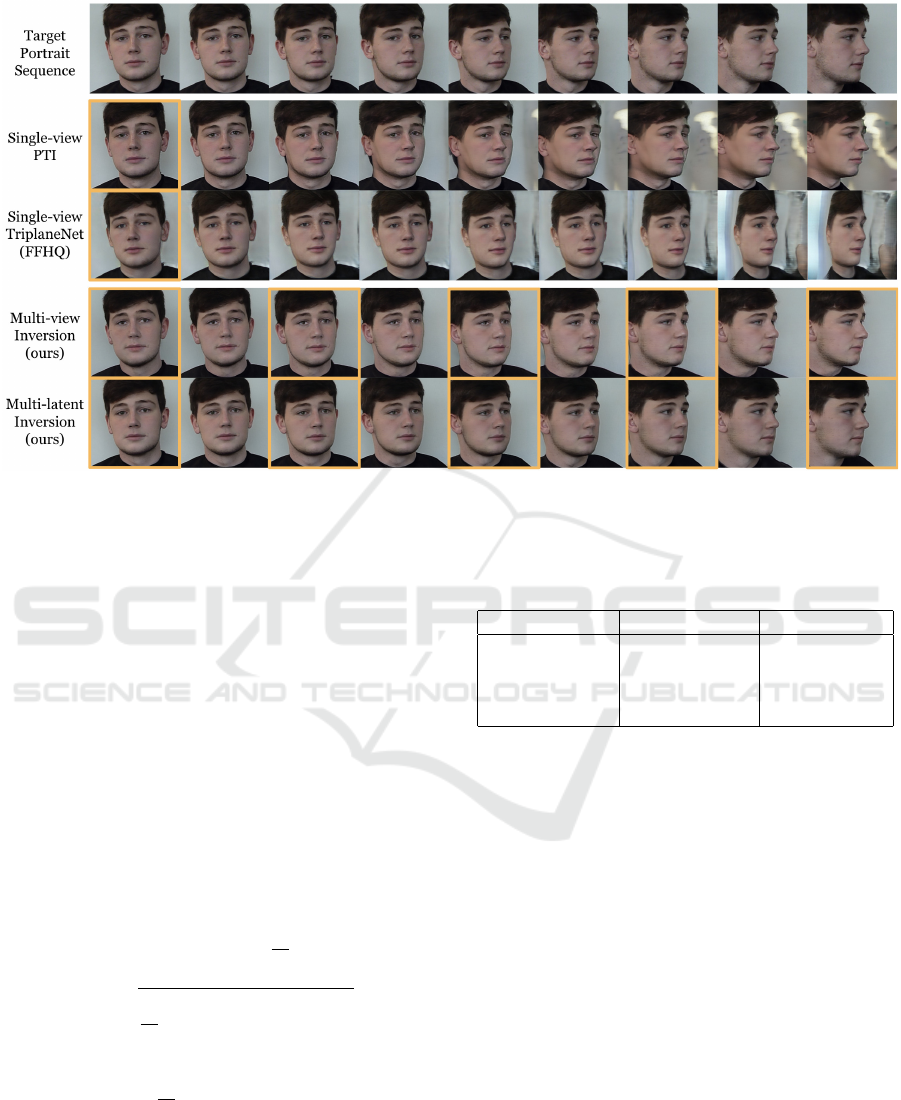
Figure 4: Qualitative comparison between state-of-the-art single-view inversion methods (Roich et al., 2021) (row 2), (Bhat-
tarai et al., 2023) (row 3) and our multi-view and multi-latent inversion methods (rows 4 & 5). The orange boxes indicate,
whether the corresponding target image from row 1 was used during optimization.
3D Consistency: As our method allows different
latent vectors for different viewpoints, we receive
slightly different geometries during a full rotation. To
reduce this effect, we implemented three regulariza-
tion methods: latent distance regularization, interpo-
lation regularization, and depth regularization. To test
their effectiveness, we propose a consistency metric
that measures the average standard deviation for all
depth maps when synthesized from different latent
vectors at the same camera viewpoint. For this pur-
pose, we select M = 60 viewpoints, along with M
interpolated latent vectors (using equation (4)) and
compute the standard deviation of all M depth maps
for each viewpoint. Given all M standard deviations,
we then compute the average:
Depth Consistency =
1
M
M
∑
i=1
σ
i
(7)
σ
i
=
v
u
u
t
1
M
M
∑
j=1
(G
depth
(w
j
, c
i
) − µ
i
)
2
(8)
µ
i
=
1
M
M
∑
j=1
G
depth
(w
j
, c
i
) (9)
The result of the depth consistency metric is listed
in table 2. It shows that the latent distance regular-
ization and the depth regularization both improve the
geometric consistency of the 3D inversion. The in-
terpolation regularization, on the other hand, slightly
Table 2: Results of the depth consistency and latent distance
for all multi-latent experiments.
Experiment Depth Cons. ↓ Latent Dist. ↓
Multi-latents 9 0.023 76.35
+ Dist. Reg 0.018 16.14
+ Inter. Reg 0.020 11.06
+ Depth Reg 0.014 11.18
decreases the consistency. This is expected as the in-
terpolation regularization mainly focuses on inversion
quality along the interpolated path instead of estab-
lishing a geometric consistency.
In addition to depth consistency, we also mea-
sure the average distance between neighboring latent
vectors in W +. Here, we observe that the distance
is considerably reduced when applying both distance
regularization and interpolation regularization. This
underlines that both regularization methods help the
inversion algorithm to find a more compact solution,
where all latent vectors are close to each other.
4.5 Qualitative Results
Figure 4 underlines the inversion improvements qual-
itatively. We compare both single-view experiments
(PTI and TriplaneNet) to our multi-view and multi-
latent approaches. As the single-view experiments
have to invent information for views showing the side,
we observe a considerably worse quality when rotat-
ing the camera from the center.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
200
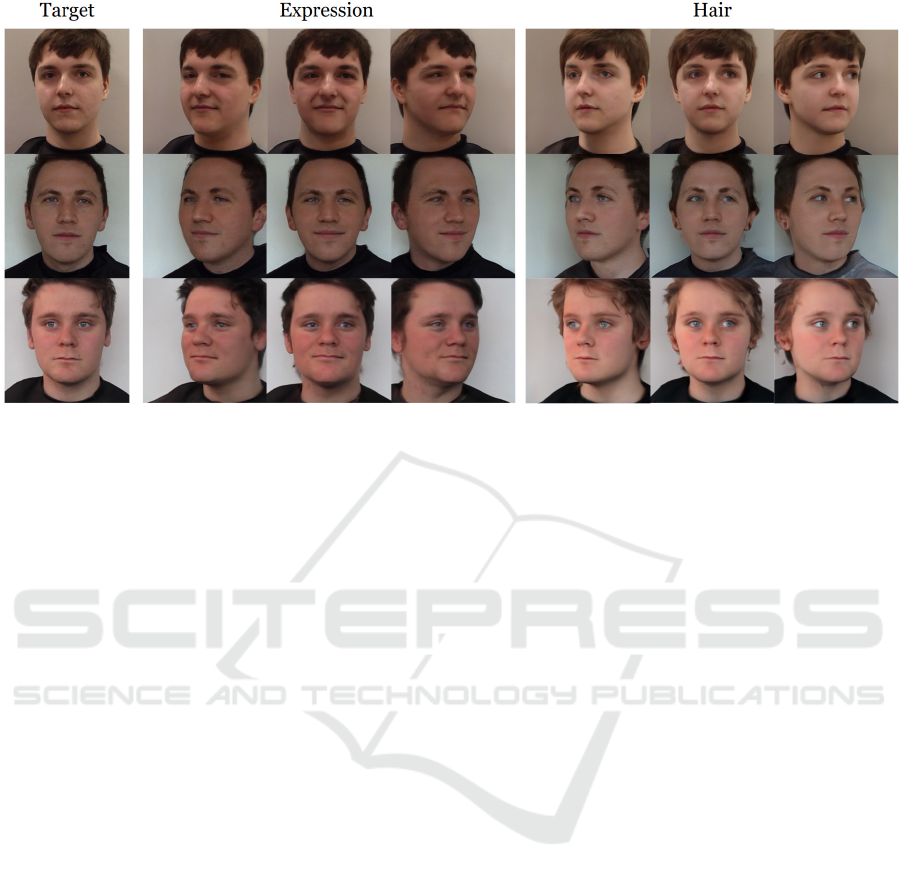
Figure 5: We first invert a face using multi-latent inversion and then edit the result using GAN Space (H
¨
ark
¨
onen et al., 2020).
We move all latent vectors along the seventh and and fourth PCA componant to edit the expression and hair, respectively.
The multi-view experiment, on the other hand,
shows a very consistent inversion quality throughout.
Nevertheless, for steep viewing angles, we observe
clear discrepancies in geometry and shading.
The best inversion quality is obtained using our
multi-latent approach. It shows very similar render-
ings to the target images and also provides good re-
sults for viewpoints that were not present during opti-
mization.
4.6 Editing Results
Finally, we demonstrate the editing capabilities of the
inverted images. We use our multi-latent inversion
algorithm and edit the resulting image using GAN
Space (H
¨
ark
¨
onen et al., 2020). This method first cal-
culates the PCA components of W +. Afterwards, we
move all M latent vectors in the direction of specific
components. Since the components correlate with
certain image features, we are able to control the ap-
pearance of the subject. In figure 5, we demonstrate
this with three examples where we change the expres-
sion and the hair. This can be achieved by amplifying
the seventh or third PCA component of the latent vec-
tors.
Figure 5 underlines that the edit is invariant to the
viewing direction. Subsequently, all M latent vectors
behave identically when moving in the latent space.
Nevertheless, the GAN Space method does not al-
low very precise and controlled editing of the images.
For instance, when changing the hair in figure 5, we
observe other attributes such as the skin or the eyes,
change as well. To address this limitation, other edit-
ing methods, such as DragYourGAN (Pan et al., 2023)
or StyleFlow (Abdal et al., 2021) could be applied in-
stead.
5 CONCLUSION
In our work, we introduce a novel 3D GAN inver-
sion method that incorporates the information from all
viewing angles of dynamic face videos to accurately
synthesize 3D renderings from any perspective. We
show that our method significantly outperforms cur-
rent state-of-the-art inversion methods, which all rely
on re-synthesizing a full 3D model using only one im-
age showing a face from a frontal viewpoint. In addi-
tion, we introduce several regularization methods to
improve the consistency of the 3D renderings when
viewed from various viewpoints. Finally, we demon-
strate the editing capabilities when utilizing our 3D
inversion method.
For future work, we will investigate how well
hybrid- or encoder-based inversion methods could be
combined with multi-view or multi-latent inversion.
This could potentially speed up the optimization pro-
cess considerably. In addition, we will test how well
other GAN editing methods could be applied after re-
synthesizing an image via multi-latent inversion.
Multi-View Inversion for 3D-aware Generative Adversarial Networks
201

ACKNOWLEDGEMENTS
This work has partly been funded by the Ger-
man Research Foundation (project 3DIL, grant
no. 502864329) and the German Federal Ministry
of Education and Research (project VoluProf, grant
no. 16SV8705).
REFERENCES
Abdal, R., Qin, Y., and Wonka, P. (2019). Im-
age2StyleGAN: How to Embed Images Into the Style-
GAN Latent Space? In 2019 IEEE/CVF International
Conference on Computer Vision (ICCV), pages 4431–
4440, Seoul, Korea (South). IEEE.
Abdal, R., Qin, Y., and Wonka, P. (2020). Im-
age2stylegan++: How to edit the embedded images?
In 2020 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 8293–8302.
Abdal, R., Zhu, P., Mitra, N. J., and Wonka, P.
(2021). Styleflow: Attribute-conditioned exploration
of stylegan-generated images using conditional con-
tinuous normalizing flows. ACM Trans. Graph., 40(3).
An, S., Xu, H., Shi, Y., Song, G., Ogras, U. Y., and Luo,
L. (2023). Panohead: Geometry-aware 3d full-head
synthesis in 360deg. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 20950–20959.
Barron, J. T., Mildenhall, B., Tancik, M., Hedman, P.,
Martin-Brualla, R., and Srinivasan, P. P. (2021). Mip-
nerf: A multiscale representation for anti-aliasing
neural radiance fields.
Bau, D., Zhu, J.-Y., Wulff, J., Peebles, W., Strobelt, H.,
Zhou, B., and Torralba, A. (2019a). INVERTING
LAYERS OF A LARGE GENERATOR.
Bau, D., Zhu, J.-Y., Wulff, J., Peebles, W., Zhou, B., Stro-
belt, H., and Torralba, A. (2019b). Seeing what a gan
cannot generate. pages 4501–4510.
Bhattarai, A. R., Nießner, M., and Sevastopolsky, A.
(2023). TriPlaneNet: An Encoder for EG3D Inver-
sion. arXiv:2303.13497 [cs].
Brehm, S., Barthel, F., and Lienhart, R. (2022). Control-
ling 3D Objects in 2D Image Synthesis. SN Computer
Science, 4(1):48.
Chan, E., Monteiro, M., Kellnhofer, P., Wu, J., and Wet-
zstein, G. (2020). pi-gan: Periodic implicit generative
adversarial networks for 3d-aware image synthesis. In
arXiv.
Chan, E. R., Lin, C. Z., Chan, M. A., Nagano, K., Pan,
B., Mello, S. D., Gallo, O., Guibas, L., Tremblay, J.,
Khamis, S., Karras, T., and Wetzstein, G. (2021). Ef-
ficient geometry-aware 3D generative adversarial net-
works. In arXiv.
Colloff, M. F., Flowe, H. D., Smith, H. M. J., Seale-Carlisle,
T. M., Meissner, C. A., Rockey, J. C., Pande, B., Ku-
jur, P., Parveen, N., Chandel, P., Singh, M. M., Prad-
han, S., and Parganiha, A. (2022). Active exploration
of faces in police lineups increases discrimination ac-
curacy. American Psychologist, 77(2):196–220.
Deng, J., Guo, J., Xue, N., and Zafeiriou, S. (2019a). Ar-
cface: Additive angular margin loss for deep face
recognition. In 2019 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
4685–4694.
Deng, Y., Yang, J., Xu, S., Chen, D., Jia, Y., and Tong,
X. (2019b). Accurate 3d face reconstruction with
weakly-supervised learning: From single image to im-
age set. In IEEE Computer Vision and Pattern Recog-
nition Workshops.
Deshmukh, T. and Bhat, M. (2022). GAN inversion of high-
resolution images. Journal of Innovative Image Pro-
cessing, 4(2):103–114.
Gu, J., Liu, L., Wang, P., and Theobalt, C. (2021). Stylenerf:
A style-based 3d-aware generator for high-resolution
image synthesis.
H
¨
ark
¨
onen, E., Hertzmann, A., Lehtinen, J., and Paris, S.
(2020). Ganspace: Discovering interpretable gan con-
trols. In Proc. NeurIPS.
Karras, T., Aila, T., Laine, S., and Lehtinen, J. (2018). Pro-
gressive growing of GANs for improved quality, sta-
bility, and variation. In International Conference on
Learning Representations.
Karras, T., Aittala, M., Laine, S., H
¨
ark
¨
onen, E., Hellsten, J.,
Lehtinen, J., and Aila, T. (2021). Alias-free generative
adversarial networks. In Proc. NeurIPS.
Karras, T., Laine, S., and Aila, T. (2019). A Style-
Based Generator Architecture for Generative Adver-
sarial Networks. arXiv:1812.04948 [cs, stat].
Karras, T., Laine, S., Aittala, M., Hellsten, J., Lehtinen, J.,
and Aila, T. (2020). Analyzing and Improving the Im-
age Quality of StyleGAN. In 2020 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 8107–8116, Seattle, WA, USA. IEEE.
Niemeyer, M. and Geiger, A. (2021). GIRAFFE: Represent-
ing Scenes as Compositional Generative Neural Fea-
ture Fields. In 2021 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
11448–11459, Nashville, TN, USA. IEEE.
Pan, X., Tewari, A., Leimk
¨
uhler, T., Liu, L., Meka, A.,
and Theobalt, C. (2023). Drag Your GAN: Inter-
active Point-based Manipulation on the Generative
Image Manifold. Special Interest Group on Com-
puter Graphics and Interactive Techniques Confer-
ence Conference Proceedings, pages 1–11. Confer-
ence Name: SIGGRAPH ’23: Special Interest Group
on Computer Graphics and Interactive Techniques
Conference ISBN: 9798400701597 Place: Los Ange-
les CA USA Publisher: ACM.
Park, K., Sinha, U., Barron, J. T., Bouaziz, S., Goldman,
D. B., Seitz, S. M., and Martin-Brualla, R. (2021a).
Nerfies: Deformable neural radiance fields. ICCV.
Park, K., Sinha, U., Hedman, P., Barron, J. T., Bouaziz, S.,
Goldman, D. B., Martin-Brualla, R., and Seitz, S. M.
(2021b). Hypernerf: A higher-dimensional represen-
tation for topologically varying neural radiance fields.
ACM Trans. Graph., 40(6).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
202

Perarnau, G., van de Weijer, J., Raducanu, B., and
´
Alvarez,
J. M. (2016). Invertible Conditional GANs for image
editing. In NIPS Workshop on Adversarial Training.
Richardson, E., Alaluf, Y., Patashnik, O., Nitzan, Y., Azar,
Y., Shapiro, S., and Cohen-Or, D. (2021). Encoding
in style: a stylegan encoder for image-to-image trans-
lation. In IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR).
Roich, D., Mokady, R., Bermano, A. H., and Cohen-Or, D.
(2021). Pivotal tuning for latent-based editing of real
images. ACM Trans. Graph.
Shi, Y., Aggarwal, D., and Jain, A. K. (2021). Lift-
ing 2D StyleGAN for 3D-Aware Face Generation.
In 2021 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 6254–6262,
Nashville, TN, USA. IEEE.
Shoshan, A., Bhonker, N., Kviatkovsky, I., and Medioni,
G. (2021). Gan-control: Explicitly controllable gans.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision (ICCV), pages 14083–
14093.
Wang, Z., Simoncelli, E., and Bovik, A. (2003). Multiscale
structural similarity for image quality assessment. In
The Thrity-Seventh Asilomar Conference on Signals,
Systems & Computers, 2003, pages 1398–1402, Pa-
cific Grove, CA, USA. IEEE.
Wu, Y., Zhang, J., Fu, H., and Jin, X. (2023). Lpff: A
portrait dataset for face generators across large poses.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision (ICCV), pages 20327–
20337.
Xia, W., Zhang, Y., Yang, Y., Xue, J.-H., Zhou, B., and
Yang, M.-H. (2022). GAN Inversion: A Survey.
arXiv:2101.05278 [cs].
Xie, J., Ouyang, H., Piao, J., Lei, C., and Chen, Q. (2023).
High-fidelity 3D GAN Inversion by Pseudo-multi-
view Optimization. In 2023 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 321–331, Vancouver, BC, Canada. IEEE.
Xu, Z., Peng, S., Lin, H., He, G., Sun, J., Shen, Y., Bao,
H., and Zhou, X. (2023). 4k4d: Real-time 4d view
synthesis at 4k resolution.
Yin, F., Zhang, Y., Wang, X., Wang, T., Li, X., Gong,
Y., Fan, Y., Cun, X., Cengiz, O., and Yang, Y.
(2022). 3d gan inversion with facial symmetry prior.
arxiv:2211.16927.
Zhang, R., Isola, P., Efros, A. A., Shechtman, E., and Wang,
O. (2018). The unreasonable effectiveness of deep
features as a perceptual metric. In 2018 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 586–595.
Zhu, J., Shen, Y., Zhao, D., and Zhou, B. (2020). In-domain
gan inversion for real image editing. In Proceedings
of European Conference on Computer Vision (ECCV).
Zhu, J.-Y., Kr
¨
ahenb
¨
uhl, P., Shechtman, E., and Efros, A.
(2016). Generative visual manipulation on the natural
image manifold. volume 9909.
Multi-View Inversion for 3D-aware Generative Adversarial Networks
203
