
Large Filter Low-Level Processing by Edge TPU
Gerald Krell
a
and Thilo Pionteck
Institute for Information and Communication Technology, Otto von Guericke University Magdeburg,
Universitätsplatz 2, Magdeburg, Germany
Keywords:
Edge TPU, Tensor Flow, Preprocessing, Low-Level Processing, Deep Learning.
Abstract:
Edge TPUs offer high processing power at a low cost and with minimal power consumption. They are partic-
ularly suitable for demanding tasks such as classification or segmentation using Deep Learning Frameworks,
acting as a neural coprocessor in host computers and mobile devices. The question arises as to whether this
potential can be utilized beyond the specific domains for which the frameworks are originally designed. One
example pertains to addressing various error classes by utilizing a trained deconvolution filter with a large fil-
ter size, requiring computation power that can be efficiently accelerated by the powerful matrix multiplication
unit of the TPU. However, the application of the TPU is restricted due to the fact that Edge TPU software is
not fully open source. This limits to integration with existing Deep Learning frameworks and the Edge TPU
compiler. Nonetheless, we demonstrate a method of estimating and utilizing a convolutional filter of large size
on the TPU for this purpose. The deconvolution process is accomplished by utilizing pre-estimated convolu-
tional filters offline to perform low-level preprocessing for various error classes, such as denoising, deblurring,
and distortion removal.
1 INTRODUCTION
In this paper, we introduce the utilization of Edge
Tensor Processing Units (Edge TPUs) for the low-
level processing of video streams. This task typ-
ically demands significant computational resources
and is often performed in close proximity to the sen-
sor within the processing pipeline, before any subse-
quent high-level image processing can occur.
Edge computing aims to process and store data in
close proximity to its sources (Merenda et al., 2020;
?). According to (Yazdanbakhsh et al., 2021), Ten-
sor Processing Units (TPUs) were initially developed
to accelerate machine learning inference within data
centers and later extended to support machine learn-
ing training. Edge TPUs have been introduced in a
limited number of products as inference accelerators
at the edge, positioned near sensors or databases.
Typical applications of Edge TPUs, as highlighted
by (Coral, 2021a), include image classification, ob-
ject detection, semantic segmentation, pose estima-
tion, and speech recognition.
One significant challenge when applying the Edge
TPU to non-standard applications is the limitation of
its function set. This limitation is illustrated in Fig-
ure 1. While TensorFlow encompasses a wide array of
a
https://orcid.org/0000-0002-5526-0446
features for deep learning training and inference, Ten-
sorFlow Lite (Google, 2021) is designed to optimize
models for less resource-intensive implementations,
such as mobile applications or embedded devices like
the Edge TPU.
TensorFlow Lite offers a subset of the TensorFlow
API specifically tailored for machine learning on mo-
bile and edge devices. It includes speed-optimized
functions for hardware implementation and quantiza-
tion techniques to represent data and model parame-
ters as integers.
TensorFow
T
ensorFow
Lite
Edge TPU
MatMul
BatchMatMul
SparseTensorDenseMatMul
Conv2D
DepthwiseConv2D
TransposeConv
Figure 1: TensorFlow API function set and subsets with
function candidates for Large Filter low-level processing
The function set of the Edge TPU is even smaller
which means that non-supported functions are out-
sourced and executed on the hosting CPU. An even
smaller set is supported by the EdgeCompiler (Coral,
2021b)
464
Krell, G. and Pionteck, T.
Large Filter Low-Level Processing by Edge TPU.
DOI: 10.5220/0012370500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
464-473
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Hence, we illustrate which functions can be em-
ployed for low-level processing using the Edge TPU.
Figure 1 offers a comparison between the extensive
function set of TensorFlow and TensorFlow Lite and
the highly limited set supported by the Edge Com-
piler. We identify potential functions suitable for our
targeted image low-level processing.
Regrettably, some promising func-
tions, such as MatMul, BatchMatMul, or
SparseTensorDenseMatMul for direct matrix opera-
tions, are not available for the Edge TPU. TensorFlow
provides the Conv2d operation, commonly used in
Convolutional Neural Networks (CNNs). However,
the Edge TPU only supports the separable version,
DepthwiseConv2D, which should suffice for most
filtering tasks.
In the realm of image low-level processing, convo-
lution serves as the mathematical foundation for lin-
ear filtering. This entails convolving a one or more-
dimensional image with a corresponding one or more-
dimensional filter kernel. When working with separa-
ble filter kernels, separable filtering is performed in
each dimension. This approach helps conserve math-
ematical operations and, as a result, accelerates pro-
cessing speed.
To achieve this, Deep Learning (DL) models are
developed to implement deconvolution filters. These
models are estimated through a training process that
utilizes original and degraded images, taking into ac-
count even unknown properties of the image acquisi-
tion system.
Our research demonstrates that these deconvolu-
tion models can be effectively implemented as fi-
nite impulse response (FIR) filters on Edge TPU
hardware, as provided by the Coral USB accelerator
(Coral, 2022).
The paper is structured as follows:
First, it begins by presenting the tools employed to
apply the Edge TPU for preprocessing video streams.
This is followed by an exploration of the processing
power available in the matrix multiplication unit of
the Edge TPU, in comparison to the requirements of
the targeted preprocessing model.
Next, the paper delves into the mathematical for-
mulation of convolution to model the image degrada-
tion process. It introduces the deconvolution model,
which is utilized to estimate the restoration param-
eters necessary for low-level processing. The paper
also elucidates how model parameters for restoration
can be derived from undistorted and distorted exam-
ple images.
The final section of the paper showcases experi-
ments related to model estimation and its execution
on the Edge TPU using sample data. Additionally, it
evaluates the results of the restoration process in re-
lation to model parameters. The paper also demon-
strates the advantages of using large filter sizes in dif-
ferent aspects.
2 RELATED WORK
The stages of low-level processing, such as filtering
and noise suppression, although not explicitly men-
tioned, are of paramount significance in the context of
most video stream analysis applications. To address
this, (Basler, 2021a) has incorporated an image signal
processor into the digital camera video pipeline for
low-level processing. This processor can be imple-
mented either as a customized chip directly behind the
camera sensor or as an additional component within a
processor (Basler, 2021b), specially designed for ma-
chine learning and computer vision tasks.
In their work, (Sun and Kist, 2022) provides a
comprehensive overview of the properties and appli-
cation areas of Edge TPUs while also discussing their
general limitations.
Additionally, (Abeykoon et al., 2019) successfully
ported networks for image restoration to the Edge
TPU, showcasing its versatility.
Moreover, (Zeiler et al., 2010) introduces Decon-
volutional Networks, a valuable approach for unsu-
pervised construction of hierarchical image represen-
tations, which find applications in low-level tasks like
denoising and feature extraction for object recogni-
tion.
Furthermore, research, such as that presented in
(Lecun et al., 1998), demonstrates that hand-crafted
feature extraction can be advantageously replaced by
carefully designed learning machines that can operate
directly on pixel images, as exemplified in character
recognition within the scope of (Lecun et al., 1998).
In their study, (Markovtsev, 2019) delve into the
interaction between TensorFlow and the Edge TPU.
They discuss the availability of convolutional oper-
ations and fully connected neural inference opera-
tions on the Edge TPU, taking advantage of the robust
arithmetic hardware of the TPU. Furthermore, they
demonstrate how motion blur can be simulated using
the Edge TPU with DepthwiseConv2d.
In a different research effort, (Yazdanbakhsh et al.,
2021) reported on the inference of 234K distinct con-
volutional neural networks applied to three different
categories of Edge TPU accelerators. The research
involved measuring latency under varying calculation
graph depth and width, and it revealed high inference
accuracy.
Large Filter Low-Level Processing by Edge TPU
465
Additionally, (Civit-Masot et al., 2021) compares
the application of Edge TPUs to eye fundus image
segmentation with a Single Board Computer lacking
deep learning acceleration. The study demonstrates
that machine learning-accelerated segmentation can
achieve processing times below 25 ms per image, un-
derscoring the efficiency of Edge TPU-based solu-
tions.
3 TOOLS
3.1 Workflow
While the TPU’s CISC instruction set consists of only
a limited number of instructions (Harald Bögeholz,
2017), direct programming of the Edge TPU (ETPU)
is not feasible due to the fact that the available ETPU
compiler and its controlling shared library are propri-
etary (Markovtsev, 2019). Consequently, ETPU pro-
gramming typically relies on utilizing existing Ten-
sorFlow Lite models in conjunction with the ETPU
compiler.
Instead of directly programming the ETPU, the
standard practice involves compiling established Ten-
sorFlow Lite models using the Edge TPU compiler
to enable their execution on the device. Notably, ex-
isting TensorFlow models need to be converted into
the TensorFlow Lite format, which is constrained by
quantization to unsigned byte integers. It’s worth not-
ing that direct matrix multiplication is not supported
by the Edge TPU, despite the presence of a matrix
multiplication unit in the Edge TPU hardware, which
might suggest suitability for matrix operations.
The workflow for converting a TensorFlow model
for the Edge TPU is the following:
1. Model generation by TensorFlow (computation
graph)
2. Convertion to TF Lite format (flatbuffers, quanti-
zation uint8)
3. Invokation of edgetpu_compiler
4. Edge TPU ops delegate, invoking the new model
via the interpreter
In our experiments, we employed Matlab on a PC
to estimate the finite impulse response (FIR) filter co-
efficients for deconvolution using sample images, as
described in the experiments section. Subsequently,
these restoration coefficients were used in the Python
framework on a Linux PC with the Edge TPU as an
accelerator to create and compile corresponding Ten-
sorFlow Lite (TF Lite) models for execution on the
Edge TPU.
3.2 Hardware
Both the Coral DevBoard and the USB accelerator in-
corporate the same Edge TPU and have been com-
pared, as shown in Figure 2. The former is capable of
direct integration with a camera sensor and operates
independently with its own Linux module.
The latter, on the other hand, can function as a co-
processor for a Linux PC or a Raspberry PI. Video
streams can be transmitted via a network connection.
When it comes to developing models, working with
the USB accelerator is somewhat more convenient.
This is because models can be compiled directly by
the host and then transferred to the coprocessor.
In contrast, the DevBoard’s operating system is
quite limited and not ideal for model estimation or
compilation for the Edge TPU. These tasks must be
performed on a separate host computer, and the com-
puted models must be subsequently transferred to the
DevBoard in an additional step.
DevBoard
USB accelera-
tor
advantages
integrated pe-
ripherals, direct
sensor connec-
tion (camera on
board), no load
on host
direct connec-
tion to host
(e.g. PC or
Raspberry PI)
disadvantages
no compilation
of models, lim-
ited functions
of mendel linux
no integrated
peripherals
Figure 2: Comparison between USB accelerator and
DevBoard.
4 PERFORMANCE
CONSIDERATIONS
In (Harald Bögeholz, 2017), it is noted that Ten-
sor Processing Units (TPUs) have a theoretical up-
per limit of 92 T (tera) operations per second. This
high processing capacity opens the door to intriguing
applications that require real-time processing of large
data streams.
On the other hand, the Edge TPU is designed for
mobile devices to run TensorFlow Lite models and
provides a maximum processing power of 4 T op-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
466

erations per second (Wikipedia contributors, 2021).
While this is significantly less powerful compared to
TPUs, it is still a substantial amount of processing
power, primarily dedicated to model inference tasks.
The proposed low-level processing, based on de-
convolution, aims to be implemented through deep
learning (DL) models that realize finite impulse re-
sponse (FIR) filters on the Edge TPU. Given the Edge
TPU’s robust arithmetic hardware, a critical question
arises regarding the size of FIR filters that can be ef-
fectively implemented.
Let M
ETPU
denote the processing power of one
Edge TPU clock cycle, representing the number of
multiplications-accumulations (MACs) that the Edge
TPU can compute per clock cycle. Assuming a rela-
tionship R between the Edge TPU clock and the pixel
clock, the maximum available processing power of
the Edge TPU for real-time processing of one pixel
is defined as:
M
max
P
= M
ETPU
· R . (1)
Depending on the specific Edge TPU model and the
resolution of the video stream, the value of R may
typically fall within the range of 10. We can now
compare this provided processing power M
max
P
for one
pixel with the required processing power M
req
P
for fil-
tering one pixel, both in the case of non-separable and
separable filtering.
4.1 Non-Separable Filter
Given a filter size of F
s
in two dimensions for a non-
separable filter, and considering C color channels, the
required computational costs for processing one pixel
are defined as:
M
req
P
= F
2
s
·C
2
. (2)
The assumption of two dimensions is motivated by
the Edge TPU’s primary focus on processing 2-D im-
age streams. It is also assumed that the horizontal
and vertical filter sizes are equal, which is often the
case for many tasks and is sufficient for a rough es-
timation. The square of channel numbers accounts
for cross-couplings between the channels, which con-
sider mutual influences between the channels. Such
filters can handle color errors at edges and even facil-
itate color space rotation when needed.
We find the maximum filtersize F
max
s
by rearrang-
ing equation 2 according to F
s
and substituting M
req
P
by M
max
P
and get
F
max
s
=
$
r
M
max
P
C
2
%
=
$
r
M
ETPU
· R
C
2
%
(3)
Given that M
ETPU
= 4Ki for an Edge TPU matrix mul-
tiplication unit with a size of 4096, and assuming that
the Edge TPU clock is 10 times faster than the pixel
clock (R = 10), we can calculate the maximum filter
size F
max
s
as follows: F
max
s
=
q
4Ki·10
3
2
= 67.
If we don’t need to consider cross-coupling be-
tween color channels in the filtering process and can
treat the color channels independently, the processing
costs specified in (2) can be reduced to:
M
req−wo
P
= F
2
s
·C (4)
This represents the required MACs per pixel with-
out cross-coupling, providing the processing power
needed when there’s no coupling between color chan-
nels.
For a filter without cross-coupling, the maximum
filter size approximately doubles:
F
max−wo
s
=
$
r
M
ETPU
· R
C
%
=
$
r
4Ki · 10
3
%
= 116 .
(5)
Indeed, filter sizes of this magnitude are quite com-
fortable and versatile. They are not only suitable
for tasks like noise cancellation and deblurring but
can also handle geometric transformations to com-
pensate for lens distortions or perform other coordi-
nate manipulations effectively. This level of process-
ing power opens up a wide range of applications in
image enhancement and correction, making it a valu-
able capability for the Edge TPU.
4.2 Separable Realization
For separable filters, the situation further improves as
the calculation costs reduce proportionally from F
2
s
to
2F
s
. This results in the maximum possible separable
filter size given by:
F
max−sep
s
=
M
ETPU
· R
2C
2
=
4Ki · 10
2 · 3
2
= 2275 (6)
This allows for significantly larger separable filter
sizes when considering cross-couplings, and even
about three times larger filter sizes for filters without
cross-coupling.
With the substantial filter sizes achievable, en-
abling full coupling over the entire image size by
the filter becomes realistic for typical image resolu-
tions. If these filters are available as space-variant
filters, they could be effectively employed for vari-
ous error correction tasks, including compensation of
distortions that are addressed through warping. This
level of processing capacity would offer sufficient re-
sources for what can be considered as "convenient
warping" in combination with filtering, providing a
versatile and powerful solution for a range of image
processing and correction needs.
Large Filter Low-Level Processing by Edge TPU
467

On the other hand, it’s important to note that sepa-
rable filtering is not well-suited for certain tasks, such
as the removal of rotational blur or certain types of
distortions. Separable filters are most effective for
filters with simple spatial dependencies in the hori-
zontal and vertical directions. For filters with com-
plex, non-axial dependencies between pixels, separa-
ble filters may not be as suitable, and other methods
or more complex filter designs may be required to ad-
dress these tasks effectively.
5 CONVOLUTION MODEL
The continuous formulation of convolution is repre-
sented by the equation:
g(x) =
∞
Z
−∞
h(ξ) f (x −ξ)dξ = h ∗ f . (7)
Here, the convolution result at a given position, de-
noted as g(x), is obtained through the infinite inte-
gration of the product of functions h and the shifted
function f over the variable ξ.
In digital signal processing, we work with a dis-
crete and limited form of convolution. We represent
the signal f as a vector
⃗
f containing discrete samples,
and the filter as a vector
⃗
h, resulting in the convolu-
tion operation denoted as ∗. This discrete convolution
yields the result ⃗g in vector representation:
⃗g =
⃗
h ∗
⃗
f (8)
Here, the resulting convolution samples in the vec-
tor ⃗g are obtained through the convolution operation
∗ between the vectors
⃗
h and
⃗
f , where
⃗
h contains the
coefficients of the filter h and
⃗
f contains the samples
of the signal f .
When performing convolution over a filter with M
sample points, where the index is denoted as j, the
discrete convolution result is calculated using the fol-
lowing sum for each sample point with index i:
g
i
=
M−1
∑
j=0
h
j
f
i− j
. (9)
This calculation is carried out for N sampling points,
where i varies within the range [0,N − 1]. However,
when choosing the range i = 0, 1, 2,. . ., N − 1, as-
sumptions must be made for negative indexes of f .
One common approach is to use zero padding, which
means that any negative indices of f are assumed to
be zero.
We can represent the convolution as the multipli-
cation of a matrix by a vector, as defined in (10). This
can be expressed as:
g
0
g
1
.
.
.
g
i
.
.
.
g
N−1
=
h
M−1
·· · h
1
h
0
0 ·· · 0
0 h
M−1
·· · h
1
h
0
0 ·· · 0
.
.
.
0 ·· · 0 h
M−1
·· · h
1
h
0
0
0 ·· · 0 h
M−1
·· · h
1
h
0
f
−(M−1)
.
.
.
f
−1
f
0
f
1
.
.
.
f
N−1
(10)
.
or shorter
⃗g = H
ex
⃗
f
ex
(11)
Here, ⃗g and
⃗
f
ex
are vectors that contain discrete values
and can be used to represent result and input images,
respectively, in the context of image processing.
To obtain a result vector with N elements, the in-
put vector f must be extended by M − 1 elements
above to form
⃗
f ex since, in the convolution equation
(9), otherwise, the index range of f would fall below
the range of i. Similarly, the matrix H is extended on
the left by M −1 columns to become H
ex
.
In the field of signal processing, various strategies
are discussed for implicit extension at the borders of
limited discrete signals, such as periodic or mirrored
extension. A practical assumption, also applicable for
hardware implementations as a data stream, is to set
these margin values to zero, a technique known as
zero padding. In this case,
⃗
f is extended with zeros
for negative indices.
The convolution matrix H is a sparse and circulant
Toeplitz matrix with a size of N by N + M − 1, where
each row is a right circular shift of the row above it,
and the elements in the main and side diagonals are
equal. However, this characteristic does not hold for
space-variant systems in which the filter h is depen-
dent on the location x.
When setting the border elements to zero, the ma-
trix equation (10) can be rewritten as follows:
g
0
g
1
.
.
.
g
i
.
.
.
g
N−1
=
h
0
h
1
h
0
0
.
.
.
h
M−1
··· h
1
h
0
0
.
.
.
0 h
M−1
··· h
1
h
0
f
0
f
1
.
.
.
f
N−1
(12)
or
⃗g = H
⃗
f . (13)
The matrix H, when border elements are set to zero,
forms a non-circulant square Toeplitz matrix. When
dealing with two or more dimensional signals, as is
common in image processing, the data needs to be
vectorized (Andrews and Hunt, 1977). Although a
general matrix multiplication is not available in the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
468

supported Edge TPU functions, the specific case of
multiplying a Toeplitz matrix (filter) by a vector (for
1D or 2D images) is provided by convolution func-
tions. This enables efficient processing of multidi-
mensional signals and images using the Edge TPU’s
capabilities.
g
0
g
1
.
.
.
g
i
.
.
.
g
N−1
=
f
0
0
f
1
f
0
0
.
.
.
f
N−1
·· · f
N−M
h
0
h
1
.
.
.
h
M−1
(14)
or
⃗g =
⃗
f ∗
⃗
h = F
⃗
h (15)
Utilizing convolution to model the process of image
degradation due to imperfections in the optical system
of image acquisition is a common approach in image
processing. Typically, additional noise needs to be
considered, resulting in the convolution equation:
⃗
ˆg =⃗g +⃗n (16)
Deconvolution aims to find a compensation for con-
volution using a function represented by a discrete
vector
⃗
ˆ
h in such a way that it minimizes the differ-
ence between the convolved result
⃗
ˆg ∗
⃗
ˆ
h and the origi-
nal image
⃗
f . Mathematically, deconvolution seeks to
minimize the following objective:
⃗
ˆg ∗
⃗
ˆ
h −
⃗
f
→ min . (17)
Deconvolution, even though it is a linear system, is
often an ill-conditioned problem, which implies that
it may lack a unique or stable solution. To address
this challenge, we investigate approaches to finding
well-posed solutions for estimating model parameters
in a broader context. These techniques are applied
to achieve reliable and stable deconvolution results,
mitigating the ill-conditioned nature of the problem.
6 EXPERIMENTS
6.1 Training Data Generation
As an example, the motion blur filter of (Markovtsev,
2019) was used to generate a degraded version of a
test image (see Figure 3)
For 2-dimensional image filtering, both the image
and the filter need to be vectorized to be used in the
matrix equation. If we consider
⃗
f
o
as the vectorized
original image and
⃗
h
b
as the blurring vector obtained
by vectorizing the filter kernel, we can represent the
motion-blurred image in vectorized form as:
⃗
g
b
=
⃗
f
o
∗
⃗
h
b
(18)
This notation is similar to (13), which also deals with
vectorized image and filter data, assuming that the
boundary elements are set to zero. In this specific ex-
ample, the filter kernel, as shown in Figure 3a, de-
fines
⃗
h
b
. The kernel size is 21 by 21, resulting in
N = 21 · 21 = 441 MAC operations per pixel. To
simulate a motion blur of approximately 10 pixels in
the horizontal direction, most elements of
⃗
h are set
to zero, except for the values located on a horizontal
line in the vertical middle of the right half. Convolu-
tion of the input ⃗g, provided by the image from Figure
3b, yields a simulated motion-blur result ⃗g as shown
in Figure 3c.
6.2 Estimation of Model Parameters
For deconvolution, the goal is to find a deconvolution
filter vector
⃗
ˆ
h
r
of length F
s
to reconstruct a restored
vector, denoted as
⃗
ˆ
f =
⃗
g
b
∗
⃗
ˆ
h
r
(19)
using the motion-blurred image vector
⃗
g
b
. The objec-
tive is to make
⃗
ˆ
f deviate as little as possible from the
original image
⃗
f , and the error signal is represented
by the error vector:
⃗e =
⃗
f
o
−
⃗
ˆ
f (20)
The objective is to minimize the power of this error
signal, making the error as small as possible. This
process aims to reverse the blurring, noise, and other
degradations to restore the image as faithfully as pos-
sible. The goal is to achieve a high-quality restoration
of the original image.
In practice, we aim to minimize the mean squared
deviation between the original and the restoration,
where
||
indicates the norm:
∥
⃗e
∥
2
=
⃗
f
o
−⃗g
b
∗
⃗
ˆ
h
r
2
→ min . (21)
Expressed as a matrix equation, we have:
⃗
f
o
−
ˆ
G
b
⃗
ˆ
h
r
→ min . (22)
The restoration filter vector,
⃗
ˆ
h
r
, can be estimated by
solving a linear equation system with F
s
unknowns
in the least mean square sense. This is achieved by
converting equation (19) into a matrix form:
Large Filter Low-Level Processing by Edge TPU
469

(a) (b)
(c) (d)
Figure 3: Two-dimensional image data for motion blur generation: 3a Kernel: squared filter kernel for motion blur simulation
producing blurring filter vector
⃗
h
b
; 3b Input of convolution: original image producing
⃗
f
o
; 3c Output of convolution: motion
blur simultation producing
⃗
g
b
; 3d Deconvolution Result
ˆ
O for F
s
= 27;
f
F
s
−1
f
F
s
.
.
.
f
N−1
=
g
b
F
s
−1
·· · g
b
1
g
b
0
g
b
F
s
·· · g
b
2
g
b
1
.
.
.
g
b
N−1
·· · g
b
N−F
s
ˆ
h
r
0
ˆ
h
r
1
.
.
.
ˆ
h
r
F
s
−1
(23)
or
⃗
f
o
=
⃗
g
b
∗
⃗
ˆ
h
r
=
ˆ
G
b
⃗
ˆ
h
r
, (24)
where
ˆ
G
b
is the equalization matrix of size n
r
= N −
F
s
+ 1 rows by F
s
columns assuming that we generate
sample data from all all the elements of
⃗
g
b
. The rows
of this matrix consist of pixel-wise shifted sections of
⃗g
b
. In this case, there can only be a solution for
⃗
ˆ
h
r
in
the least mean square sense because we assume n
r
≫
F
s
, meaning that we have many more equations than
unknowns. To solve equation (21), we first multiply
equation (24) by the transpose (T ) of
ˆ
G
b
from the left:
ˆ
G
b
T
⃗
f
o
=
ˆ
G
b
T
ˆ
G
b
⃗
ˆ
h
r
(25)
(26)
We can solve for the restoring filter as follows:
⃗
ˆ
h
r
=
ˆ
G
b+
⃗
f
o
. (27)
Here,
ˆ
G
b+
represents the pseudo-inverse of
ˆ
G
b
. As-
suming that
ˆ
G
b+
has at least F
s
linearly independent
rows, we can estimate the restoration using equation
(19), resulting in a restored image
⃗
ˆ
f =
⃗
f
o
−⃗e . (28)
that deviates from the original by the error vector ⃗e.
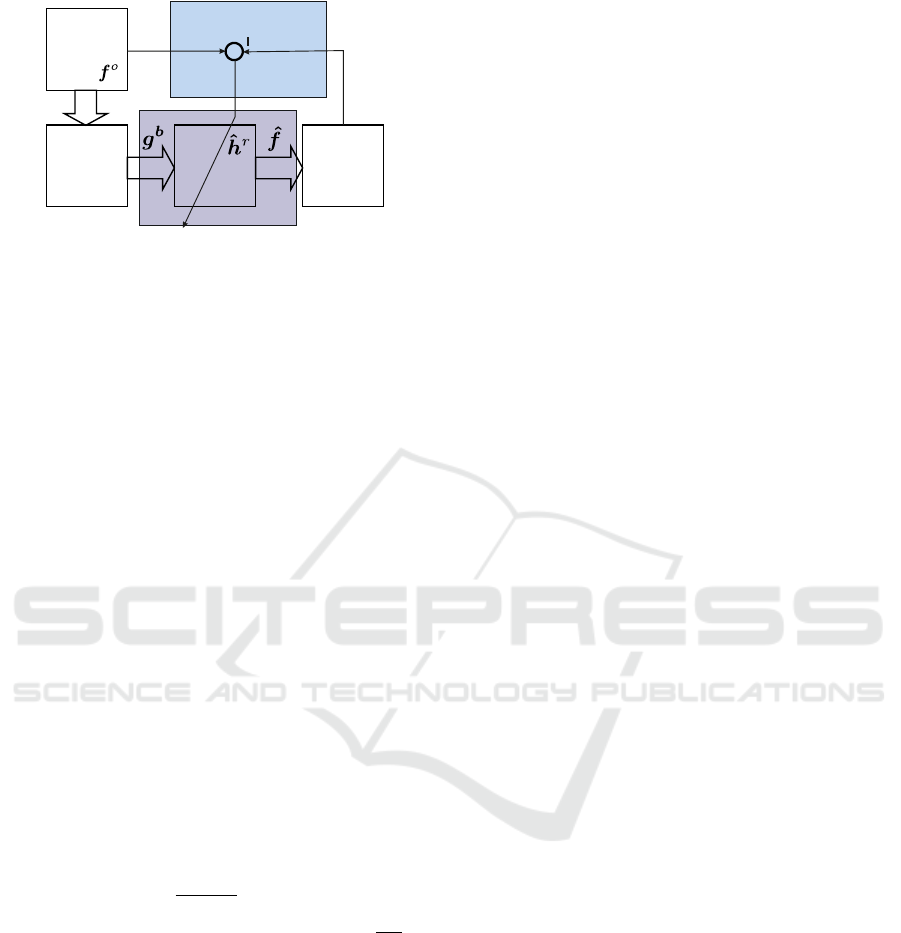
6.3 Running the Inference on the Edge
TPU
In the context of Deep Learning,
⃗
ˆ
f can be viewed as
the result of inferring the model
⃗
ˆ
h
r
using the input
vector
⃗
g
b
, as illustrated in Figure 4. Model estima-
tion is carried out on the host computer using samples
from both the ideal and restored image streams. Infer-
ence is then performed on the Edge TPU to compen-
sate for the errors resulting from image degradation.
This approach estimates the restoring filter in a
manner similar to an inverse filter. However, because
equation (22) usually has many more rows than un-
knowns, a solution in the least mean square sense can
be found. This approach takes typical image noise
into consideration, resulting in a more stable and ro-
bust result compared to directly inverting a degrading
filter matrix H.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
470
CNN
restored
image
stream
ideal
image
degraded
image
stream
degradation
on host
on ETPU
inference
model estimation
Figure 4: Dimensioning the CNN model for removal of im-
age errors
Based on the training data (see section 6.1) mod-
els of different filter sizes F
s
have been estimated by
(27) using Matlab for compensating the motion blur.
Figure 3d show one of the results for F
s
= 27. In the
practical implementation of the model estimation, not
the complete image is maybe necessary in (27) and
subimages of the whole image can be used. This can
also reflect specially varying behaviour.
The estimated Filter models first converted into a
quantized TFLite representation and then compiled
for the Edge TPU according to (Markovtsev, 2019).
The inference has then be done on the USB accelera-
tor with the training input image Figure 3c. The result
corresponds to the expected inference result of Figure
3d with little deviations caused by quantization of the
model parameters, but below a visual threshold.
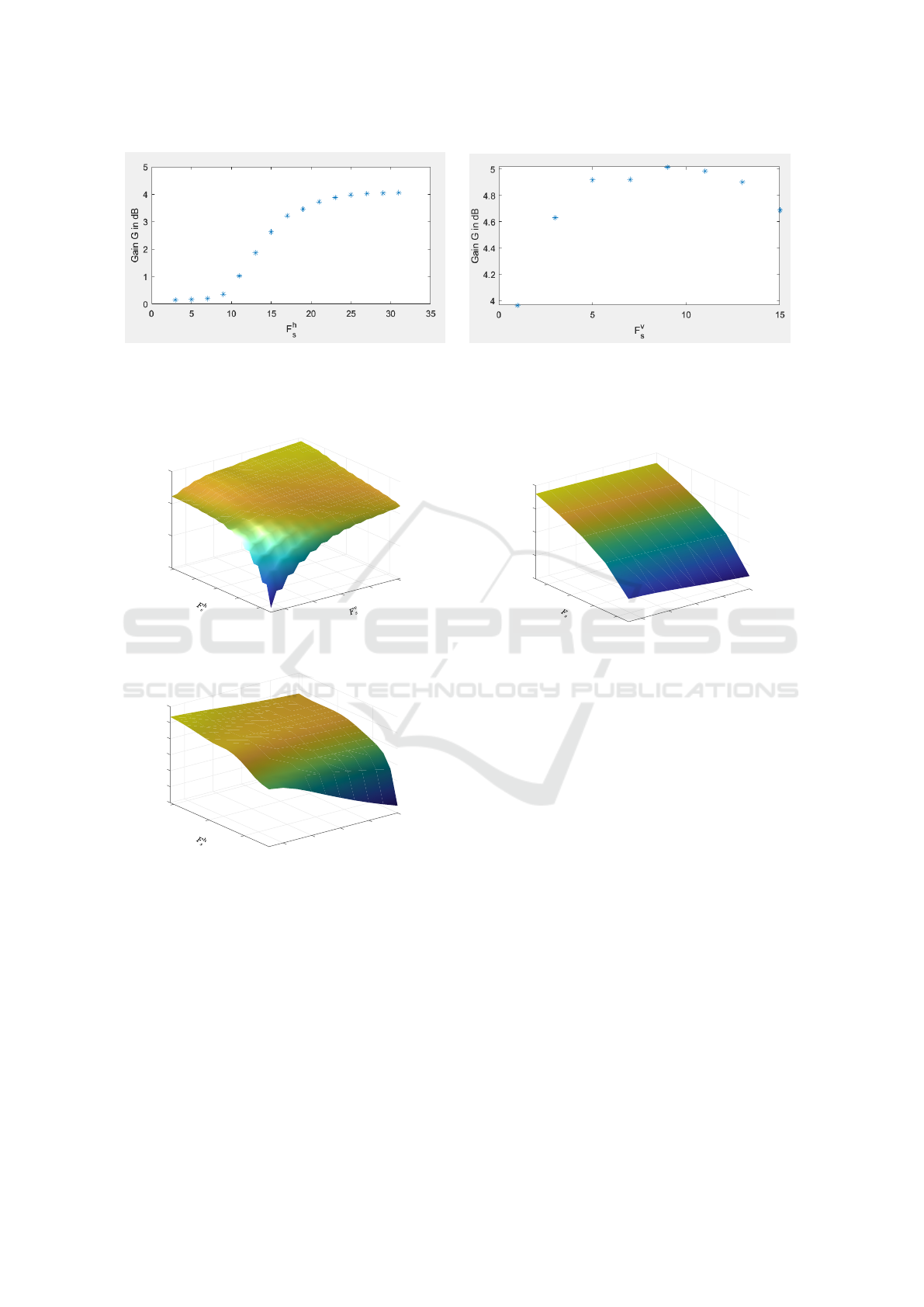
6.4 Influence of Filter Size
In order to investigate the impact of filter size onto the
the obtained enhancement we investigated the gain of
PSNR (Peak Signal to Noise Ratio) by applying the
deconvolution filter model for restoration:
G = PSNR
w
− PSNR
wo
(29)
where PSNR
wo
= 20
I
max
∥
⃗
f
o
−⃗g
b
∥
dB is the PSNR of the
input of the deconvolution and PSNR
w
= 20
I
max
∥
⃗e
∥
dB
the PSNR of the restoration with I
max
= 255 the max-
imum pixel value.
First we applied deconvolution to the motion
blurred image ⃗g
b
and changed the horizontal F
s
in a
range [1,15].
Figure 5 shows the dependency of G on the filter
size F
h
s
. It is obvious that a minimum filter size of
about F
h
s
= 10 is required in order to obtain a mean-
ingful improvement. Above filter size 30 the growth
of the gain is decreasing rapidly. This behavior can
be explained by the original motion blur of about 7
pixels which should be in the same range as F
s
.
Secondly we additionally superimposed normal
distributed noise of 40 dB. We kept the horizontal
filtersize at 27 which could be considered as an op-
timal filter size for motion blur compensation in hor-
izontal direction and increased the vertical filter size
steps for F
v
s
= 1, 3,· ·· ,15. It is visible that in the cur-
rent situation of noise and blur a filter size of about
7 is sufficient in order to compensate additionally for
the noise degradation. Together with horizontal filter
size we come to a total 2 dimensional filter size of
F
s
= F
v
s
F
h
s
= 7 ·27 = 189 which is pretty much calcu-
lation per pixel. The separable implementation needs
only F
s
= F
v
s
+ F
h
s
= 7 + 27 = 34 which is much re-
duction.
In the next experiment, we show the option to han-
dle different degradation types by application large
filter sizes in different situations. In Figure 6, we sim-
ulated motion blur of 25 pixels in a direction of 30
degrees and estimated the gain of quality for different
horizontal and vertical filter sizes.
It becomes obvious that filter sizes in the range of
blur are required to obtain good performance of the
restoration. Due to the angle of motion the horizon-
tal component is larger than the vertical component.
Correspondingly the the saturation of gain value is
reached quicker.
In 7, we additionally superimposed normally dis-
tributed noise on a motion blurred image by 25 pixels
in horizontal direction and estimated the quality gain
for different horizontal filters of size F
h
s
. The graph
shows that small filter sizes lead to weak gain, espe-
cially for higher noise levels.
In 8, we additionally superimposed normally dis-
tributed noise on the same motion blurred image and
estimated the quality gain for different 2-dimensional
filters of same horizontal and vertical sizes. The graph
shows that small filter sizes lead to weak gain, espe-
cially for higher noise levels.
All the above experiments can be performed in
real-time on the Edge TPU for typical video streams
because the filter sizes are below of the estimated lim-
its calculated in section 4.1 which is in the range of
one hundered.
7 CONCLUSIONS
We showed how a Deep Learning model for a decon-
volution filter can be dimensioned from a known input
output relation of an image capturing system and how
it can be inferred on an Edge TPU. The filter has been
estimated without using knowledge of degrading fil-
ter but on the basis of known original and degraded
image. This implicitly considers the noise impact and
Large Filter Low-Level Processing by Edge TPU
471
(a) (b)
Figure 5: Dependency of quality gain G on filter sizes F
h
s
and F
v
s
for the inference example: 5a dependency of Gain on
horizontal filter size F
h
s
for motion blurred image ⃗g
b
; 5b dependency of Gain on vertical filter size F
v
s
with additional noise
superposition by PSNR = 40dB.
20
50
25
40
50
G/dB
30
40
30
30
35
20
20
10
10
Figure 6: Gain G for different horizontal and vertical filter
sizes with a motion blur of 25 pixels in direction 30 degrees.
5
10
30
15
10
20
20
25
8
30
6
35
10
4
2
N/%
G/dB
Figure 7: Gain G for horizontal motion and different hori-
zontal filter sizes F
h
s
and noise levels.
avoids the otherwise necessity of inverting the degrad-
ing systems.
The Edge TPU allows very long filter sizes to
be calculated in real-time for low-level processing of
video streams. As part of the digittal camera pipeline
it can act as an electronic lens when the large filter
is not only used for noise reduction and deblurring
but also for the removal of larger motion blur or geo-
metric lens distortions. We showed promising results
for non-separable filter sizes in the range of up to one
hundred. With the potentially possible separable fil-
ter size of about two thousand interesting applications
20
25
10
10
30
8
8
35
6
6
40
4
4
2
N/%
G/dB
Figure 8: Gain G for different horizontal filter sizes F
s
=
F
v
s
= F
h
s
and noise levels.
could be possible which is part for future work.
The Tensor Flow provided function
TransposeConv also has potentially interesting
applications for image error compensation that are
worth exploring in further work. Unfortunately,
the potentially large filter sizes due to the large
computational power cannot be implemented in a
location-variant manner, severely limiting its appli-
cability. For such applications, tailored hardware
solutions therefore still seem to be the means of
choice.
REFERENCES
Abeykoon, V., Liu, Z., Kettimuthu, R., Fox, G., and Foster,
I. (2019). Scientific Image Restoration Anywhere. In
2019 IEEE/ACM 1st Annual Workshop on Large-scale
Experiment-in-the-Loop Computing (XLOOP), pages
8–13, Denver, CO, USA. IEEE.
Andrews, H. C. and Hunt, B. R. (1977). Digital image
restoration. Prentice-Hall signal processing series.
Prentice-Hall, Englewood Cliffs, N.J.
Basler (2021a). Design an Eye-Catching Vision System for
Machine Learning with the i.MX 8M Plus Applica-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
472

tions Processor. embedded_vision/nxp-2021-1/NXP
-TECH-SESSION-EYE-CATCHING-VISION-SYS
TEM-MLAI.pdf.
Basler (2021b). The NXP i.MX 8M Plus Applications Pro-
cessor: Bringing High-Performance Machine Learn-
ing to the Edge. embedded_vision/nxp-2021-2/AI-T
O-THE-EDGE-WP-1-1.pdf.
Civit-Masot, J., Luna-Perejón, F., Corral, J. M. R.,
Domínguez-Morales, M., Morgado-Estévez, A., and
Civit, A. (2021). A study on the use of Edge TPUs for
eye fundus image segmentation. Engineering Appli-
cations of Artificial Intelligence, 104:104384.
Coral (2021a). Models.
Coral (2021b). TensorFlow models on the Edge TPU. TP
U_Preprocessing/coral_tensorflow_nodate1/models-i
ntro.html.
Coral (2022). USB Accelerator.
https://coral.ai/products/accelerator.
Google (2021). TensorFlow Lite | ML for Mobile and Edge
Devices.
Harald Bögeholz (2017). Künstliche Intelligenz: Architek-
tur und Performance von Googles KI-Chip TPU. TP
U_Preprocessing/online_kunstliche_nodate_heise2/
Kuenstliche-Intelligenz-Architektur-und-Performan
ce-von-Googles-KI-Chip-TPU-3676312.html.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recog-
nition. Proceedings of the IEEE, 86(11):2278–2324.
TPU_Preprocessing/LeCun1998GradientbasedLA/C
onvolution_nets.pdf.
Markovtsev, V. (2019). Hacking Google Coral Edge TPU:
motion blur and Lanczos resize.
Merenda, M., Porcaro, C., and Iero, D. (2020). Edge
Machine Learning for AI-Enabled IoT Devices: A
Review. Sensors (Basel, Switzerland), 20(9):2533.
tpu-paper/merenda_edge_2020/Merendaetal.-2020-E
dgeMachineLearningforAI-EnabledIoTDevices.pdf.
Sun, Y. and Kist, A. M. (2022). Deep Learning on Edge
TPUs. arXiv:2108.13732 [cs].
Wikipedia contributors (2021). Tensor processing unit —
Wikipedia, the free encyclopedia. https://en.wikiped
ia.org/w/index.php?title=Tensor_Processing_Unit&
oldid=1056864312. [Online; accessed 20-January-
2022].
Yazdanbakhsh, A., Seshadri, K., Akin, B., Laudon, J.,
and Narayanaswami, R. (2021). An Evaluation of
Edge TPU Accelerators for Convolutional Neural Net-
works. arXiv:2102.10423 [cs]. arXiv: 2102.10423
tpu/yazdanbakhsh_evaluation_2021/2102.10423.pdf.
Zeiler, M., Krishnan, D., Taylor, G., and Fergus, R. (2010).
Deconvolutional networks. In Proceedings of the
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition, pages 2528–2535. TP
U_Preprocessing/Zeiler-2010-1/deconvolutionalnetw
orks.pdf.
Large Filter Low-Level Processing by Edge TPU
473
