
Diverse Data Selection Considering Data Distribution
for Unsupervised Continual Learning
Naoto Hayashi
a
, Naoki Okamoto
b
, Tsubasa Hirakawa
c
, Takayoshi Yamashita
d
and Hironobu Fujiyoshi
e
Chubu University, 1200 Matsumoto-cho, Kasugai, Aichi, Japan
Keywords:
Deep Learning, Image Classification, Self-Supervised Learning, Continual Learning.
Abstract:
In continual learning, the train data changes during the learning process, making it difficult to solve previously
learned tasks as the model adapts to the new task data. Many methods have been proposed to prevent catas-
trophic forgetting in continual learning. To overcome this problem, Lifelong Unsupervised Mixup (LUMP)
has been proposed, which is capable of learning unlabeled data that can be acquired in the real world. LUMP
trains a model by self-supervised learning method, and prevents catastrophic forgetting by using a mixup of
a data augmentation method and a replay buffer that stores a part of the data used to train previous tasks.
However, LUMP randomly selects data to store in the replay buffer from the train data, which may bias the
stored data and cause the model to specialize in some data. Therefore, we propose a method for selecting data
to be stored in the replay buffer for unsupervised continuous learning method.The proposed method splits the
distribution of train data into multiple clusters using the k-means clustering. Next, one piece of data is selected
from each cluster. The data selected by the proposed method preserves the distribution of the original data,
making it more useful for self-supervised learning.
1 INTRODUCTION
With the spread of the Internet of Things, it is ex-
pected that a vast amount of data accumulated online
can be used for learning deep learning models such as
Deep Convolutional Neural Networks (LeCun et al.,
1998). On the other hand, it is difficult to retain all
the acquired data while learning due to hardware ca-
pacity issues. To solve this problem, there is a method
called continual learning (Thrun, 1995), in which the
data used for learning is discarded as it is learned.
In continual learning, the train data changes during
the learning process, causing the model to adapt to
the data of the new task. This causes a problem
called catastrophic forgetting, which makes previ-
ously learned tasks difficult to solve. Continual learn-
ing uses a variety of devices to prevent catastrophic
forgetting. There are three main ways to devise con-
tinual learning. The first is an architecture-based
a
https://orcid.org/0009-0000-6909-3346
b
https://orcid.org/0000-0003-0053-8890
c
https://orcid.org/0000-0003-3851-5221
d
https://orcid.org/0000-0003-2631-9856
e
https://orcid.org/0000-0001-7391-4725
method that devises a network structure. The sec-
ond is a regularization-based method that suppresses
catastrophic forgetting by using regularization. The
third is a replay-based method that stores a part of the
data used in learning a previous task and reuses the
data when learning a new task. Many of the contin-
ual learning methods proposed until now are super-
vised continual learning methods that assume learn-
ing only on labeled data. However, there is only a
small amount of labeled data in the real world.
Therefore, to use a large amount of real-world
data, learning using unlabeled data needs to be as-
sumed. To solve this problem, Lifelong Unsupervised
Mixup (LUMP) (Madaan et al., 2022) has been pro-
posed, which can learn unlabeled data. LUMP learns
by self-supervised learning using only unlabeled data
and prevents catastrophic forgetting using a data aug-
mentation method mixup (Zhang et al., 2017) and a
replay buffer that stores a part of data used to learn
previous tasks. LUMP randomly selects data to store
in the replay buffer from the train data. If data is se-
lected randomly, the data to store may be biased, re-
sulting in a model that is specialized to particular data.
Therefore, we propose a method for improving
the data selection to store in the replay buffer to in-
528
Hayashi, N., Okamoto, N., Hirakawa, T., Yamashita, T. and Fujiyoshi, H.
Diverse Data Selection Considering Data Distribution for Unsupervised Continual Learning.
DOI: 10.5220/0012369300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
528-535
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
crease accuracy and suppress catastrophic forgetting
in unsupervised continual learning. The proposed
method splits the distribution of train data into mul-
tiple clusters using the k-means clustering (Hartigan
and Wong, 1979). Next, a single data is selected from
each cluster. The data to store in the replay buffer by
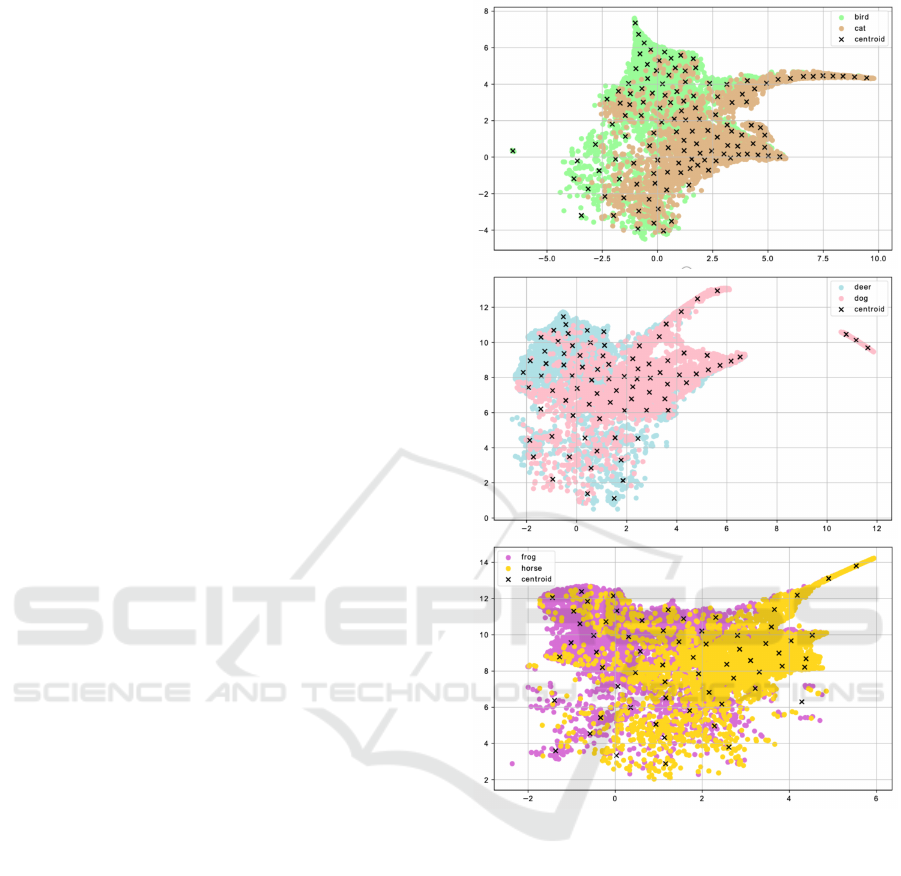
using the proposed method is shown in Figure 1. As
shown in Figure 1, the data selected by the proposed
method preserves the distribution of the original data
and has generalizability, making it more useful for
self-supervised learning. Our experimental results
demonstrate the effectiveness of the proposed method
by comparing quantitative and qualitative evaluations
of the proposed and conventional methods.
In summary, our contributions are as follows:
• We propose a data selection method using the k-
means clustering. From the qualitative evaluation,
we found that the proposed method selects diverse
data without bias in the latent space.
• This research demonstrates that keeping diverse
data in the replay buffer improves classification
accuracy and the forgetting rate and shows that
the selection of diverse data has a positive effect
on self-supervised learning.
2 RELATED WORK
This chapter introduces self-supervised learning and
continual learning.
2.1 Self-Supervised Learning
Self-supervised learning is a pre-train method using
large amounts of unlabeled data. Contrastive learn-
ing (Ye et al., 2019; He et al., 2020; Li et al.,
2021; Zbontar et al., 2021; Zhang et al., 2022) and
non-contrastive learning without negative pairs (Grill
et al., 2020; Caron et al., 2020) are typical Self-
supervised learning methods. Self-supervised learn-
ing requires learning on more diverse data to create a
general-purpose model.
SimCLR (Chen et al., 2020) is a typical con-
trastive learning method. In this method, the data in
the batch that is not one’s own data is used as the neg-
ative sample, and the data augmented to one’s own
data is input to the network as the positive sample,
and the network learns to separate the negative sample
from one’s own data in the latent space and to make
the positive sample close to one’s own data. A feature
of SimCLR is that larger batch sizes increase negative
sample variation and improve performance.
SimSiam (Chen and He, 2021) is a typical non-
contrastive learning method. This method applies dif-
Figure 1: Data selected by the proposed method. In prac-
tice, the proposed method selects the data with the maxi-
mum for each centroid and cosine similarity.
ferent data augmentations to a single piece of data to
produce two pieces of data. The two pieces of gener-
ated data are input to the network. The network learns
to increase the similarity of the two feature vectors
output from the network. In this method, stop-grad
is introduced to solve the problem of collapse, where
any data input to the network produces the same out-
put to reduce losses. A feature of SimSiam is that
it does not require negative samples, and its network
structure and loss calculations are simpler than those
of the contrastive learning method.
This research uses SimSiam, which can be trained
simply as self-supervised learning.
Diverse Data Selection Considering Data Distribution for Unsupervised Continual Learning
529

2.2 Continual Learning
Continual learning is a method of learning by ob-
taining new data at regular intervals. In continual
learning, the train data changes during the learning
process. This causes a phenomenon called catas-
trophic forgetting, in which the model adapts to the
new task data, making previously learned tasks dif-
ficult to solve. To prevent catastrophic forgetting,
several continual learning methods have been pro-
posed, such as architecture-based methods (Mallya
and Lazebnik, 2018; Yoon et al., 2018) that devise
network structures, regularization-based methods (Li
and Hoiem, 2016; Kirkpatrick et al., 2017; Chaudhry
et al., 2018), and replay-based methods (Shin et al.,
2017; Lopez-Paz and Ranzato, 2017; Chaudhry et al.,
2019; Aljundi et al., 2019; Buzzega et al., 2020; Pu-
rushwalkam et al., 2022; Wang et al., 2022; Tiwari
et al., 2022; Lin et al., 2023) that reproduce datasets
used in previous learning when learning new data.
Progressive Neural Networks (PNN) (Rusu et al.,
2016) is one of the architecture-based methods. PNN
prepares a network for each task and trains each task
in turn. For the second and later tasks, in addition to
the usual vertical connection of the layers of the net-
work, a horizontal connection is made with the layer
of the network where the previous task was learned,
so that the representation of the previously learned
task is reflected in the latest representation. The pro-
cess in PNN is as follows:
h
(k)
i
= f (W
(k)
i
h
(k)
i−1
+
∑
j<k
U
(k: j)
i
h
( j)
i−1
)
f (x) = max (0, x)
(1)
where W
(k)
i
is the vertically oriented layer weights
from i−1 to i layers of task k, h
(k)
i−1
is the output value
of i − 1 layer of task k, U
(k: j)
i
is the horizontally ori-
ented layer weights from i−1 layer of task j to i layer
of task k, and h
( j)
i−1
is the output value of the i −1-layer
of task j.
Synaptic Intelligence (SI) (Zenke et al., 2017)
is one of the regularization-based methods. SI uses
three-dimensional weights and a measure of impor-
tance to control catastrophic forgetting. When using
one-dimensional weights, the network easily paints
over the knowledge learned in the previous task as it
learns the next task. Therefore, this method mimics
the human brain and prevents catastrophic forgetting
by using three-dimensional weights to fix knowledge.
Importance is a measure of how much each weight
influences the change in the loss function. The im-
portance is calculated as follows:
L(w(t
u
)) − L(w(t
u−1
))≈
∑
k
Z
t
u
t
u−1
g
k
(w(t))w
′
k
(t)dt
≈
∑
k
p
u
k
(2)
where t
u
is the time when task u is learned, t
u−1
is the
time when task u − 1 is learned, w(t
u
) is the weight
when task u is learned, and w(t
u−1
) is the weight
when task u − 1 is learned. In addition, g
k
is calcu-
lated by
∂L
∂w
k
and w
′
k
by
∂w
k
∂t
. By stopping the updat-
ing of weights of high importance in past tasks as a
penalty, catastrophic forgetting can be prevented.
Many previous methods of continual learning as-
sumed learning on labeled data. However, most data
available in the real world is unlabeled data, so it can-
not be used as data for traditional continual learning
methods. To solve this problem, Lifelong Unsuper-
vised Mixup (LUMP) has been proposed, which per-
forms continual learning by self-supervised learning
using unlabeled data. This method is a replay-based
unsupervised continual learning method that prevents
catastrophic forgetting by storing some of the data
from previously learned tasks in a replay buffer and
using that data when learning new tasks. When data
from past tasks is used, it is combined with data from
new tasks using a mixup of data augmentation meth-
ods, and the data are then used in self-supervised
learning to prevent catastrophic forgetting.
There are task-incremental, class-incremental,
and domain-incremental scenarios as problem set-
tings for continual learning. This research focuses on
how to select data to be stored in the replay buffer in
task-incremental and class-incremental problem set-
tings.
3 PROPOSED METHOD
This chapter describes the proposed method. In this
paper, we investigate the data to be stored in the replay
buffer in LUMP, which is a conventional continual
learning method, and proposes an improved method
for selecting the data to be stored. Our proposed
method uses the k-means clustering for data selection
and the selection of data to be deleted from the replay
buffer.
3.1 Preliminary Survey
Before going to the details of the proposed method,
we investigate the data to be selected by LUMP. As
mentioned before, LUMP randomly selects data from
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
530

Figure 2: Data selected by LUMP. The data marked with a
cross in the figure is selected and stored in the replay buffer.
the data in the batch when storing data in the replay
buffer. Figure 2 shows the distribution of data se-
lected by LUMP. This figure shows that when data
is selected randomly, a large amount of data is se-
lected from areas where the density of the original
train data is high, and only a small amount of data
is selected from areas where the density of the train
data is low. This suggests that when data is randomly
selected, the data in the replay buffer becomes biased
and loses generalizability, preventing the acquisition
of a variety of features. Therefore, we propose a con-
tinual learning method that introduces a method for
selecting data so that the data to be stored in the re-
play buffer is more diverse.
3.2 Diverse Data Selection for
Unsupervised Continual Learning
We propose an unsupervised continual learning
method that takes into consideration the data distri-
bution of the train data by introducing the k-means
clustering and performs various data selections. The
flow of the proposed method is shown in Algorithm
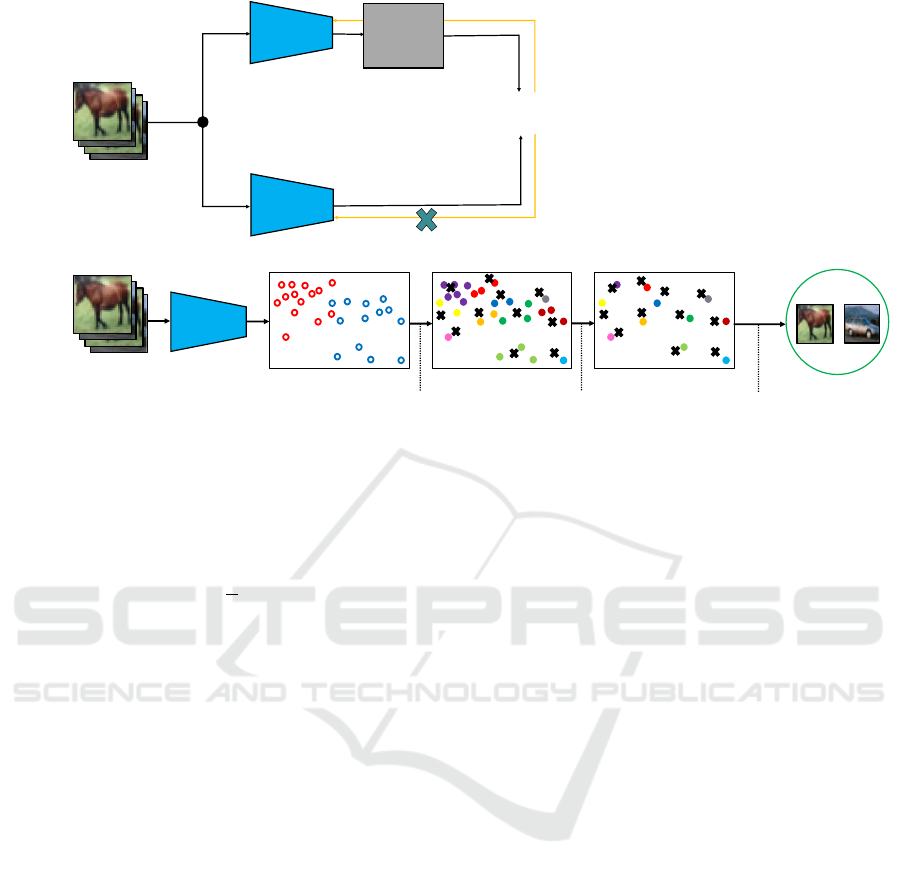
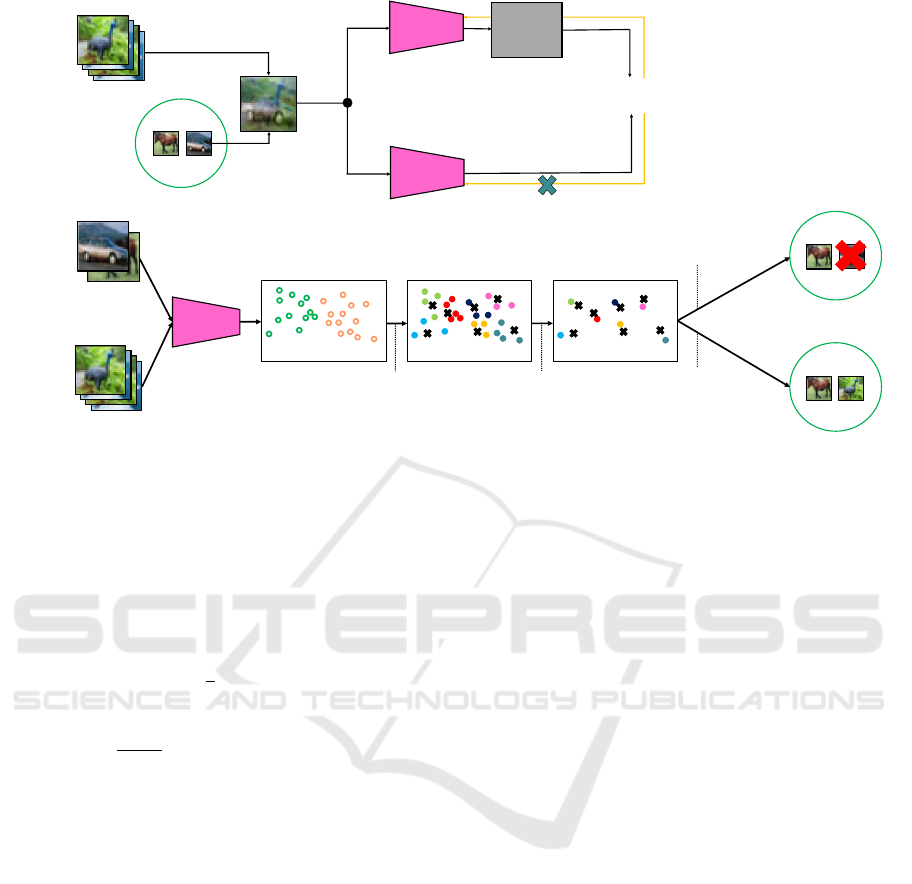
1. The flow of the first task is shown in Figure 3, and
the flow of the second and subsequent tasks is shown
in Figure 4.
In the first task (see Fig. 3), after learning with the
train data, the data to be stored in the replay buffer is
selected. The centroid of the clusters obtained by the
k-means clustering is scattered throughout the data
distribution, and by selecting the closest data from the
centroids of each cluster. It is possible to consider
the original data distribution and learn diverse data,
which is expected to improve accuracy and suppress
catastrophic forgetting in the classification task.
In the second and subsequent tasks (see Fig. 4),
the train data and the data in the replay buffer are
combined by mixup, and the data is used for learn-
ing. After that, the data to be deleted from the replay
Data: Total number of tasks T , Size of replay
buffer B, Data of the new task x
i
, Data
in the replay buffer x
j
, Number of data
to be stored in replay buffer n
for t ← 1 to T do
n ←−
B
t
;
if t = 1 then
Self-supervised learning with
SimSiam(x
i
);
else
x ←− Combine x
i
and x
j
by mixup;
Self-supervised learning with
SimSiam(x);
Select B − n pieces of data to be
deleted from up to t − 1 task in the
replay buffer;
end
Select n pieces of data to store in the
replay buffer by k-means clustering
from the data in task t;
end
Algorithm 1: The proposed method.
buffer is selected, and the data for a new task is se-
lected to be stored in the free replay buffer space.
3.2.1 Learning Method
Learning of the proposed method is based on the
LUMP setting. The first task is self-supervised learn-
ing using train data. The second and subsequent tasks
use mixup of a data augmentation method to combine
data from previous tasks already stored in the replay
buffer with train data for the new task, and the com-
bined data is used for self-supervised learning. The
method of generating data X by mixup is as follows:
X = λX
i
+ (1 − λ)X
j
(3)
where X
i
is the train data for the current task, X
j
is the
data from the previous task in the replay buffer, and
λ is the hyperparameter that determines the mixing
ratio.
3.2.2 Data Selection by k-means Clustering
When selecting data to be stored in the replay buffer,
the train data for each task is input to the encoder after
learning is completed and features are acquired. Clus-
tering is performed by applying the k-means cluster-
ing to the acquired features. The number of clusters
set by the k-means clustering is the number of data to
be stored in the replay buffer. Next, the data corre-
sponding to the feature with the highest cosine simi-
larity from the centroid of each cluster is selected and
Diverse Data Selection Considering Data Distribution for Unsupervised Continual Learning
531
Data
augmentation
Loss
Stop-grad
Predictor
Encoder
Encoder
Train data
Encoder
Clustering by
k-means method
Select the closest feature
from each centroid
Train data
Replay buffer
Store train data corresponding
to selected features
Step 1
Step 2
Figure 3: Flow of the first task of the proposed method. In the first task, after learning with the train data, the data to be stored
in the replay buffer is selected.
stored in the replay buffer. The number n of data to
be stored in the replay buffer is calculated as follows:
n =
B
t
i
(4)
where B is the buffer size, t
i
is the task id, t
i
= 1 for the
first task, and any decimal point value is truncated so
that n is a natural number. Before storing the data for
each task in the replay buffer, the data in the current
replay buffer is input to the encoder to acquire fea-
tures and select the data to be left in the replay buffer
as well as the data selection from the train data. The
number of data to be left in the replay buffer is B − n.
Finally, the replay buffer stores the data selected for
the new task in the space where the deleted data ex-
isted.
4 EXPERIMENT
This chapter presents a quantitative evaluation of the
effectiveness of the proposed method by comparing
it with a conventional method, LUMP, using the in-
dices of classification accuracy and oblivion rate for
the class classification problem. We also visualize the
data stored in the replay buffer with LUMP and the
proposed method and qualitatively evaluate whether
the proposed method selects data that preserves the
data distribution.
4.1 Experimental Settings
In this experiment, the dataset is Split CIFAR-10
(Krizhevsky, 2009) divided into 5 tasks of 2 classes
each and Split CIFAR-100 divided into 5 tasks of 20
classes each, the network is ResNet-18 (He et al.,
2016), and the self-supervised learning method is
SimSiam. The number of learning epochs is 200,
the batch size and replay buffer size is 256 for the
Split CIFAR-10 experiment, and the batch size and
replay buffer size is 512 for the Split CIFAR-100 ex-
periment.
The k-Nearest Neighbor algorithm (k-NN) is used
as the evaluation method. In k-NN, the data to be
estimated is plotted on the plotted coordinates of the
train data, and the class with the highest number of
correct labels assigned to the k train data closest to the
plotted data is used as the result of estimation. The
qualitative evaluation visualizes the data selected by
LUMP and the data selected by the proposed method
when using the model of after learning the first task
of Split CIFAR-10.
4.2 Evaluation Metrics
We use the average accuracy and average forgetting
rate at the end of learning all tasks as the evaluation
metrics in the task-increasing problem setting. The
average accuracy is the average classification accu-
racy for each task when using a model that has com-
pleted learning on all tasks. The average forgetting
rate is the average difference between the best classifi-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
532
Data
augmentation
Loss
Stop-grad
Predictor
Encoder
Encoder
Replay buffer
mixup
Train data
Encoder
Clustering by
k-means method
Select the closest feature
from each centroid
Train data
Store the train data
corresponding to the selected
features in the free space
Stored data
in Replay buffer
Step 1
Step 2
Step 3
Replay buffer
Replay buffer
Delete from the replay buffer
other than data corresponding to
the selected features
Figure 4: Flow of the second and subsequent tasks of the proposed method. In the second and subsequent tasks, the train data
and the data in the replay buffer are combined by mixup, and the data is used for learning. After that, the data to be deleted
from the replay buffer is selected, and the data for a new task is selected to be stored in the free replay buffer space.
cation accuracy for each task and the classification ac-
curacy when using a model that has completed learn-
ing on all tasks. The average accuracy and average
forgetting rate are calculated as follows:
A
τ
=
1
τ
τ
∑
i=1
a
τ,i
(5)
F =
1
T − 1
T −1
∑
i=1
max
τ∈(1,...,T )
(a
τ,i
− a
T,i
) (6)
where T is the number of tasks, a
τ,i
is the accuracy
of learning on task τ and evaluating on task i, and
a
T,i
is the accuracy of learning on the last task T and
evaluating on task i. This experiment uses τ = T in
equation (5) and evaluates the average accuracy when
all tasks have completed learning.
As an evaluation measure in the class-increasing
problem setting, the classification accuracy of all
learned classes when all classes have completed
learning is used.
4.3 Quantitative Evaluation
Evaluation was conducted in task-incremental and
class-incremental problem settings.
4.3.1 Task-Incremental Problem Setting
The average accuracy and average forgetting rate for
5 tasks of 2-class classification using Split CIFAR-
10 and 5 tasks of 20-class classification using Split
CIFAR-100 are shown in Table 1. The values in
Table 1 are the averages of the experiments with
three different seed values. In Table 1, the proposed
method improves the average accuracy by 0.69 pt and
the average forgetting rate by 0.12 pt compared with
LUMP in the Split CIFAR-10 experiment. In the re-
sult of the Split CIFAR-100 experiment, the proposed
method improves the average accuracy by 1.57 pt and
the forgetting rate by 1.72 pt compared with LUMP.
These results suggest that the proposed data selection
method is effective.
4.3.2 Class-Incremental Problem Setting
Table 2 shows the accuracy of 10-class classification
when using a model that has completed learning all of
Split CIFAR-10 and the accuracy of 100-class classi-
fication when using a model that has completed learn-
ing all of Split CIFAR-100. The values in Table 1
are the averages of the experiments with three differ-
ent seed values. In Table 2, the proposed method im-
proves the accuracy by 2.42 pt for the 10-class clas-
sification and by 1.26 pt for the 100-class classifi-
cation compared with LUMP. This results suggests
that the proposed method is effective even in class-
incremental problem setting.
4.4 Qualitative Evaluation
The data selected by LUMP and the proposed method
are shown in Figures 2 and 5, respectively. The data
Diverse Data Selection Considering Data Distribution for Unsupervised Continual Learning
533
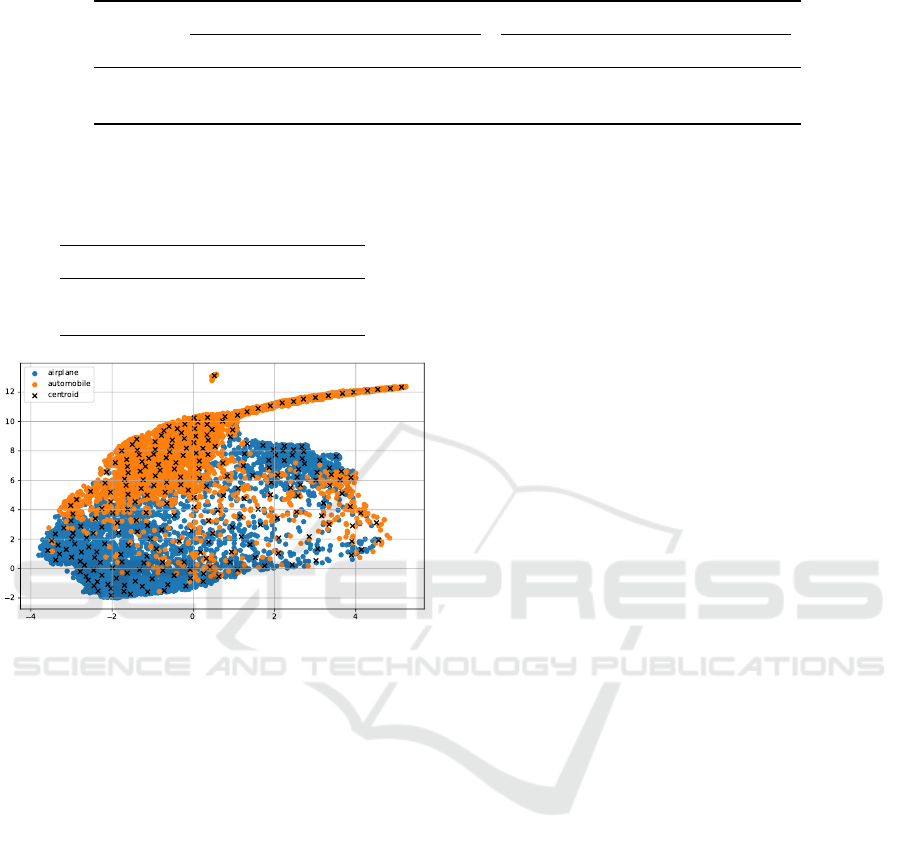
Table 1: Average accuracy [%] and average forgetting rate [pt] in a task-incremental problem setting.
Average Accuracy Average Forgetting Rate
Method Split CIFAR-10 Split CIFAR-100 Split CIFAR-10 Split CIFAR-100
LUMP 90.81 61.38 2.02 3.51
Ours 91.50 62.95 1.90 1.79
Table 2: Accuracy of 10-class classification using CIFAR-
10 [%] and 100-class classification using CIFAR-100 [%]
in a class-incremental problem setting.
CIFAR-10 CIFAR-100
LUMP 65.41 40.02
Ours 67.83 41.28
Figure 5: Data selected by the proposed method. The pro-
posed method selects the data with the maximum for each
centroid and cosine similarity.
selected by the proposed method is that with the max-
imum centroid and cosine similarity to each of the
centroids in Figure 5. Comparing Figures 2 and 5,
the proposed method can select data considering the
original data distribution and store a wide diversity of
data. These results suggest that the selection of di-
verse data is effective in improving classification ac-
curacy and forgetting rate.
5 CONCLUSIONS
In this research, we proposed an unsupervised con-
tinual learning method using a diverse data selection
method based on k-means clustering. In the exper-
iments, we observed that the proposed method pre-
serves the distribution of train data and selects a di-
versity of data. We observed an improvement in clas-
sification accuracy and forgetting rate with the pro-
posed method. In the future, we plan to evaluate the
proposed method when other self-supervised learning
methods are used.
REFERENCES
Aljundi, R., Lin, M., Goujaud, B., and Bengio, Y. (2019).
Gradient based sample selection for online continual
learning. Neural Information Processing Systems con-
ference.
Buzzega, P., Boschini, M., Porrello, A., Abati, D., and
Calderara, S. (2020). Dark experience for general con-
tinual learning: a strong, simple baseline. Neural In-
formation Processing Systems conference.
Caron, M., Misra, I., Mairal, J., Goyal, P., Bojanowski, P.,
and Joulin, A. (2020). Unsupervised learning of visual
features by contrasting cluster assignments. Neural
Information Processing Systems conference.
Chaudhry, A., Dokania, P. K., Ajanthan, T., and Torr, P.
H. S. (2018). Riemannian walk for incremental learn-
ing: Understanding forgetting and intransigence. Eu-
ropean Conference on Computer Vision.
Chaudhry, A., Ranzato, M., Rohrbach, M., and Elhoseiny,
M. (2019). Efficient lifelong learning with a-GEM. In-
ternational Conference on Learning Representations.
Chen, T., Kornblith, S., Norouzi, M., and Hinton, G. (2020).
A simple framework for contrastive learning of visual
representations. International Conference on Machine
Learning.
Chen, X. and He, K. (2021). Exploring simple siamese rep-
resentation learning. Conference on Computer Vision
and Pattern Recognition.
Grill, J.-B., Strub, F., Altch
´
e, F., Tallec, C., Richemond, P.,
Buchatskaya, E., Doersch, C., Avila Pires, B., Guo,
Z., Gheshlaghi Azar, M., et al. (2020). Bootstrap your
own latent-a new approach to self-supervised learn-
ing. Neural Information Processing Systems confer-
ence.
Hartigan, J. A. and Wong, M. A. (1979). Algorithm as
136: A k-means clustering algorithm. Journal of the
royal statistical society. series c (applied statistics),
28(1):100–108.
He, K., Fan, H., Wu, Y., Xie, S., and Girshick, R. (2020).
Momentum contrast for unsupervised visual represen-
tation learning. Conference on Computer Vision and
Pattern Recognition.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. Conference on
Computer Vision and Pattern Recognition.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J.,
Ramalho, T., Grabska-Barwinska, A., Hassabis, D.,
Clopath, C., Kumaran, D., and Hadsell, R. (2017).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
534

Overcoming catastrophic forgetting in neural net-
works. Proceedings of the National Academy of Sci-
ences, 114(13):3521–3526.
Krizhevsky, A. (2009). Learning multiple layers of features
from tiny images. Technical Report.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Li, J., Zhou, P., Xiong, C., and Hoi, S. (2021). Prototyp-
ical contrastive learning of unsupervised representa-
tions. International Conference on Learning Repre-
sentations.
Li, Z. and Hoiem, D. (2016). Learning without forgetting.
European Conference on Computer Vision.
Lin, H., Zhang, B., Feng, S., Li, X., and Ye, Y. (2023).
Pcr: Proxy-based contrastive replay for online class-
incremental continual learning. Conference on Com-
puter Vision and Pattern Recognition.
Lopez-Paz, D. and Ranzato, M. (2017). Gradient episodic
memory for continual learning. Neural Information
Processing Systems conference.
Madaan, D., Yoon, J., Li, Y., Liu, Y., and Hwang, S. J.
(2022). Representational continuity for unsuper-
vised continual learning. International Conference on
Learning Representations.
Mallya, A. and Lazebnik, S. (2018). Packnet: Adding mul-
tiple tasks to a single network by iterative pruning.
Conference on Computer Vision and Pattern Recog-
nition.
Purushwalkam, S., Morgado, P., and Gupta, A. (2022). The
challenges of continuous self-supervised learning. Eu-
ropean Conference on Computer Vision.
Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer,
H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R.,
and Hadsell, R. (2016). Progressive neural networks.
arXiv preprint arXiv:1606.04671.
Shin, H., Lee, J. K., Kim, J., and Kim, J. (2017). Continual
learning with deep generative replay. Neural Informa-
tion Processing Systems conference.
Thrun, S. (1995). A lifelong learning perspective for mobile
robot control. Elsevier.
Tiwari, R., Killamsetty, K., Iyer, R., and Shenoy, P. (2022).
Gcr: Gradient coreset based replay buffer selection for
continual learning. Conference on Computer Vision
and Pattern Recognition.
Wang, L., Zhang, X., Yang, K., Yu, L., Li, C., Hong, L.,
Zhang, S., Li, Z., Zhong, Y., and Zhu, J. (2022). Mem-
ory replay with data compression for continual learn-
ing. International Conference on Learning Represen-
tations.
Ye, M., Zhang, X., Yuen, P. C., and Chang, S.-F. (2019).
Unsupervised embedding learning via invariant and
spreading instance feature. Conference on Computer
Vision and Pattern Recognition.
Yoon, J., Yang, E., Lee, J., and Hwang, S. J. (2018).
Lifelong learning with dynamically expandable net-
works. International Conference on Learning Repre-
sentations.
Zbontar, J., Jing, L., Misra, I., LeCun, Y., and Deny, S.
(2021). Barlow twins: Self-supervised learning via
redundancy reduction. International Conference on
Machine Learning.
Zenke, F., Poole, B., and Ganguli, S. (2017). Continual
learning through synaptic intelligence. International
Conference on Machine Learning.
Zhang, C., Zhang, K., Pham, T. X., Niu, A., Qiao, Z., Yoo,
C. D., and Kweon, I. S. (2022). Dual temperature
helps contrastive learning without many negative sam-
ples: Towards understanding and simplifying moco.
Conference on Computer Vision and Pattern Recogni-
tion.
Zhang, H., Cisse, M., Dauphin, Y. N., and Lopez-Paz, D.
(2017). mixup: Beyond empirical risk minimization.
arXiv preprint arXiv:1710.09412.
Diverse Data Selection Considering Data Distribution for Unsupervised Continual Learning
535
