
PenGym: Pentesting Training Framework for Reinforcement
Learning Agents
Huynh Phuong Thanh Nguyen
1
, Zhi Chen
1
, Kento Hasegawa
2
, Kazuhide Fukushima
2
and
Razvan Beuran
1
1
Japan Advanced Institute of Science and Technology, Japan
2
KDDI Research, Inc., Japan
Keywords:
Penetration Testing, Reinforcement Learning, Agent Training Environment, Cyber Range.
Abstract:
Penetration testing (pentesting) is an essential method for identifying and exploiting vulnerabilities in com-
puter systems to improve their security. Recently, reinforcement learning (RL) has emerged as a promising
approach for creating autonomous pentesting agents. However, the lack of realistic agent training environ-
ments has hindered the development of effective RL-based pentesting agents. To address this issue, we pro-
pose PenGym, a framework that provides real environments for training pentesting RL agents. PenGym makes
available both network discovery and host-based exploitation actions to train, test, and validate RL agents in
an emulated network environment. Our experiments demonstrate the feasibility of this approach, with the
main advantage compared to typical simulation-based agent training being that PenGym is able to execute real
pentesting actions in a real network environment, while providing a reasonable training time. Therefore, in
PenGym there is no need to model actions using assumptions and probabilities, since actions are conducted
in an actual network and their results are real too. Furthermore, our results show that RL agents trained with
PenGym took fewer steps on average to reach the pentesting goal—7.72 steps in our experiments, compared
to 11.95 steps for simulation-trained agents.
1 INTRODUCTION
Network security plays a critical role in our current
network-centric society. Penetration testing (pentest-
ing) is an important aspect of cybersecurity that in-
volves assessing the security posture of networks or
systems by conducting ethical cyberattacks on them.
However, traditional pentesting has significant chal-
lenges to overcome, such as the lack of IT profession-
als with sufficient skills. Recently, there has been a
growing interest in applying machine learning tech-
niques to automate and improve pentesting.
In this context, reinforcement learning (RL) has
emerged as a promising approach for training agents
to perform pentesting tasks in a more effective man-
ner. Thus, RL agents aim to replicate the actions of
human pentesters, but with the speed, scale, and preci-
sion that only programs can achieve. This is achieved
by making it possible for the RL agents to navigate
complex network environments, detect vulnerabili-
ties, and exploit them to evaluate security risks. Fun-
damentally, through a process of trial and error, the
RL agents learn to optimize their actions by adapting
to various environment challenges (Zhou et al., 2021).
However, so far RL agents have been trained
and are performing penetration testing mainly in
simulated environments. Simulators provide an in-
memory abstraction of processes that occur in real
computer networks, which makes them faster and eas-
ier to use than their real counterparts. However, sim-
ulators often suffer from a “reality gap”, as the level
of abstraction used in simulator makes it difficult to
deploy the trained agents in real networks. For exam-
ple, the authors of CyberBattleSim themselves argue
that their framework is too simplistic to be used in
the real world (Microsoft Defender Research Team,
2021). This means that agent performance may suffer
when used with real networks due to the differences
with the simulated environment. In particular, the
translation of simulated actions (e.g., exploits, priv-
ilege escalation) to real actions is not trivial. As a
result, creating and operating realistic environments
for the training of pentesting AI agents is crucial.
To address this issue, we have developed PenGym,
a framework for training RL agents for pentesting
purposes using a real cyber range environment. The
key feature of PenGym is that it makes it possible for
agents to execute real actions in an actual network en-
vironment, which have real results that correspond to
RL agent state and observations. Thus, PenGym elim-
498
Nguyen, T., Chen, Z., Hasegawa, K., Fukushima, K. and Beuran, R.
PenGym: Pentesting Training Framework for Reinforcement Learning Agents.
DOI: 10.5220/0012367300003648
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Information Systems Security and Privacy (ICISSP 2024), pages 498-509
ISBN: 978-989-758-683-5; ISSN: 2184-4356
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

inates the need to model agent actions via execution
assumptions and success probability. Therefore, our
approach provides a more accurate representation of
the pentesting process, since everything is based on
actual network behavior, and yields more realistic re-
sults than simulation.
The effectiveness of PenGym has been validated
through several experiments, which demonstrated its
reasonable training time and suitability as an alterna-
tive to simulation-based environments. Moreover, the
trained agents were used successfully to conduct real
pentesting attacks in the cyber range.
By using PenGym, security researchers and prac-
titioners can train RL agents to perform pentesting
tasks in a safe and controlled environment, thus ob-
taining more realistic results than via simulation, but
without the risks associated with real network pen-
testing. By providing the environment for executing
actions, the framework can also be used to evaluate
and compare the effectiveness in real network envi-
ronments of various pentesting RL techniques.
The main contributions of this paper are:
• Present the design and implementation of
PenGym, with particular focus on the action im-
plementation that represents its key feature.
• Discuss a set of experiments that demonstrate
the potential of using PenGym to effectively
train RL agents in pentesting when compared to
simulation-based training.
The remainder of this paper is organized as fol-
lows. In Section 2, we discuss related research works.
In Section 3, we provide an overview of the PenGym
architecture, followed by a detailed description of the
action/state module implementation in Section 4. We
then present the results of the validation experiments
in Section 5. The paper ends with a discussion, con-
clusions, and references.
2 RELATED WORK
The field of cybersecurity has seen a growing use of
cyber range network environments as a popular train-
ing method for cybersecurity professionals. More-
over, recent studies have explored the design and im-
plementation of cyber range environments for con-
ducting cyber attack simulations and for training RL
agents in tasks such as intrusion detection, malware
analysis, and penetration testing. We will discuss
some of the most representative studies below; a
summary of their characteristics when compared to
PenGym is given in Table 1. All approaches are
compared based on their abstraction level and execu-
tion environment features. Regarding the abstraction
level, simulation-based approaches use a simulation
environment to execute actions. In these approaches,
actions are modeled by checking several required con-
ditions, and returning success if all the conditions are
met (Schwartz and Kurniawati, 2019). On the other
hand, emulation environments require actual hosts, an
actual network topology, and agents that execute real
actions on those hosts (Li et al., 2022). When con-
sidering execution environment features, the config-
urable elements are used for comparison, including
features such as firewalls and host actions.
Several frameworks were developed for cyber
range training. SmallWorld (Furfaro et al., 2018) and
BRAWL (The MITRE Corporation, 2018) use cloud-
based infrastructure and virtualization technologies to
simulate user interaction with a host, but they lack
RL capabilities. While some training environments
for AI-assisted pentesting that focus on host-based
exploitation have been proposed in previous studies
(Pozdniakov et al., 2020)(Chaudhary et al., 2020),
their scope of game goals and available actions is
quite limited. In (Ghanem and Chen, 2018), the au-
thors proposed a training environment for network
penetration testers modeled as a Partially Observable
Markov Decision Process (POMDP), but details of
the environment and reinforcement learning training
were not provided. Another experimental testbed for
emulated RL training for network cyber operations
is Cyber Gym for Training Autonomous Agents over
Emulated Network Systems (CyGIL) (Li et al., 2022).
CyGIL uses a stateless environment architecture and
incorporates the MITRE ATT&CK framework to es-
tablish a high-fidelity training environment.
Network Attack Simulator (NASim) (Schwartz
and Kurniawati, 2019) proposed an RL agent train-
ing approach for network-wide penetration tests us-
ing the API of OpenAI Gym (Brockman et al., 2016).
NASim represents networks and cyber assets, includ-
ing hosts, devices, subnets, firewalls, services, and
applications, using abstractions modeled with a finite
state machine. The simplified action space includes
network and host discovery, service exploitation for
each configured service vulnerability in the network,
and privilege escalation for each hackable process
running in the network. The agent can simulate a sim-
plified kill chain through discovery, privilege escala-
tion, and service exploits across the network. How-
ever, NASim assumes that the simulated actions must
satisfy various predefined conditions, and uses proba-
bilities to determine their success.
Microsoft has recently open-sourced its RL agent
network training environment, the CyberBattleSim
(CBS) (Microsoft Defender Research Team, 2021),
PenGym: Pentesting Training Framework for Reinforcement Learning Agents
499
Table 1: Comparison of related frameworks from abstraction level and environment feature perspectives.
Small World BRAWL
Smart Security
Audit
CyGIL
Microsoft
CBS
CybORG FARLAND NASim PenGym (Ours)
Abstraction Level
Simulation Based ✓ ✓ ✓ ✓ ✓
Real Hosts ✓ ✓ ✓ ✓ ✓ ✓ ✓
Real Network Topology ✓ ✓ ✓ ✓ ✓ ✓
Real Actions ✓ ✓ ✓ ✓ ✓ ✓ ✓
Real Observations ✓ ✓ ✓ ✓ ✓ ✓ ✓
Designed for RL ✓ ✓ ✓ ✓ ✓ ✓ ✓
Host-Based Exploitation ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓
Network-Based Exploitation
✓ ✓ ✓ ✓ ✓ ✓
Environment Features
Firewalls ✓ ✓ ✓
Network Scanning ✓ ✓ ✓ ✓ ✓ ✓
Host Scanning (OS Scan,
Process Scan, Service Scan)
✓ ✓ ✓
Exploits ✓ ✓ ✓ ✓ ✓ ✓ ✓ ✓
Privilege Escalation ✓ ✓ ✓ ✓ ✓ ✓ ✓
which is also built using the OpenAI Gym API. CBS
is designed for red agent training that focuses on the
lateral movement phase of a cyberattack in a simu-
lated fixed network with configured vulnerabilities.
Similar to NASim, CBS allows users to define the net-
work layout and the list of vulnerabilities with their
associated nodes. It is important to note that CBS is
stated to have a highly abstract nature that cannot be
directly applied to real-world systems.
CybORG (Standen et al., 2021) is a gym for train-
ing autonomous agents through simulating and emu-
lating different environments using a common inter-
face. It supports red and blue agents, and implements
different scenarios at varying levels of fidelity. Actu-
ator objects facilitate interactions with security tools
and systems, such as executing real actions through
APIs or terminal commands, using the Metasploit
pentesting framework (Maynor, 2011). The focus of
CybORG lies in developing an autonomous pentest-
ing agent using RL and host-based exploitation, al-
though it does not consider network traffic discovery
or connections between subnets.
The FARLAND framework (Molina-Markham
et al., 2021) is designed for training agents via simu-
lation and testing agents via emulation. It offers func-
tionality such as probabilistic state representations
and support for adversarial red agents. However, un-
like CybORG, FARLAND focuses on network-based
discovery instead of host-based exploitation.
To summarize, all of the frameworks mentioned
above have their own limitations. Thus, some of them
are designed to support real environments with only
a few actions, such as exploits and privilege escala-
tion (Furfaro et al., 2018) (The MITRE Corporation,
2018) (Li et al., 2022). Moreover, some of those sys-
tems fail to consider the host configuration before at-
tempting an attack, and are not designed for RL pur-
poses(Furfaro et al., 2018) (The MITRE Corporation,
2018). Other approaches focus on either host-based
exploit actions (Microsoft Defender Research Team,
2021) (Standen et al., 2021), or network-based ac-
tions (Molina-Markham et al., 2021), but not both of
them. Only NASim (Schwartz and Kurniawati, 2019)
supports both host-based and network-based actions,
including external firewalls, but it uses a simulation
environment to carry out these actions.
Given the limitations of NASim, and taking in-
spiration from the emulation approaches discussed so
far, we have developed PenGym as an extension of
the NASim library that makes it possible to both train
and use pentesting RL agents in real network environ-
ments. PenGym covers both network traffic discovery
and host-based exploitation actions that are all actu-
ally conducted in the emulated environment.
3 PenGym OVERVIEW
PenGym is a framework for creating and managing
real environments aimed at training RL agents for
penetration testing purposes. It provides an environ-
ment where an RL agent can learn to interact with
a network environment, carrying out various pene-
tration testing tasks, such as exploit execution, and
privilege escalation. PenGym uses the same API with
the OpenAI Gymnasium (formerly Gym) library, thus
making it possible to employ it with all the RL agents
that follow those specifications.
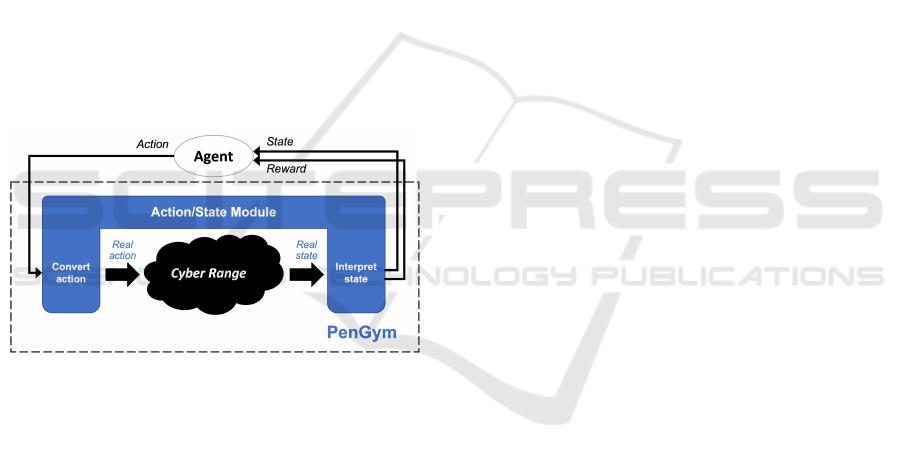
An overview of PenGym is shown in Figure 1.
First, the RL agent selects an action from the avail-
able space using an algorithm suited to its learning
objectives. Subsequently, PenGym converts this logi-
cal action into an executable real action, which is then
executed in the cyber range environment set up using
KVM virtual machines. Following action execution,
the actual observations, such as available services or
exploit status, along with the new state of the envi-
ronment, are interpreted by PenGym and sent back to
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
500
the agent. The agent receives a corresponding reward
and relevant system information. The rewards are de-
fined via a scenario file, which contains different pos-
itive rewards for each successfully executed action. In
case of failure, the agent receives a negative reward.
For the scope of this paper, the reward values used
adhere to those predefined in NASim. The agent then
updates its learning algorithm to select the next suit-
able action. For example, if an observation shows a
certain available service, the agent can use an exploit
based on that service for the next step. The use of the
acquired state information and corresponding reward
to refine and enhance the underlying algorithm, ulti-
mately fosters the RL agent’s learning and optimiza-
tion process. This key functionality of PenGym is
implemented via its core component, the Action/State
Module, which has two main roles:
• Convert the actions generated by the RL agent
into real actions that are executed in the Cyber
Range environment.
• Interpret the outcome of the actions and returns
the state of the environment and the reward to the
agent, so that processing can continue.
Figure 1: Overview of the PenGym architecture.
The Action/State Module module implements a
range of penetration testing techniques that are exe-
cuted on actual target hosts, thus enabling penetration
testing in conditions similar to real-world scenarios.
The Cyber Range in PenGym is created using
KVM virtualization technology to build a custom net-
work environment that hosts virtual machines, with
each cyber range consisting of a predefined group
of hosts, services, and vulnerabilities that are made
available for the interaction with the RL agent. The
composition and content of a cyber range is deter-
mined based on the content of NASim scenario files in
order to build an equivalent environment in PenGym.
NASim scenario files act as a blueprint for the cy-
ber range environment and a guide for the behavior of
the agents. In particular, they define: (i) the network
environment, such as the characteristics of the various
hosts (e.g., operating system, processes and services,
etc.), subnets and firewall rules between hosts, and (ii)
the actions that RL agents can take, how rewards are
obtained and what pre-conditions are necessary for
the agents to perform those actions successfully.
4 IMPLEMENTATION
In NASim, the action space is a collection of feasible
actions an agent can execute. These actions includes
various scan actions (e.g., service scan, OS scan, pro-
cess scan, and subnet scan) that help identify vulnera-
bilities and access points in the network. They mimic
the functionality of the Nmap utility (Lyon, 2014),
providing information about active services and the
operating system running on a specified host.
The action space in NASim allows for exploit ac-
tions on services and machines in the network, which
can lead to unauthorized access and the exploitation
of vulnerabilities. The success of an exploit action is
determined by factors such as the existence of the tar-
get service, firewall rules, and the success probability.
Privilege escalation, a tactic to gain higher access, is
also included. Thus, NASim simulates various net-
work security mechanisms.
One major limitation of using simulated actions
as done in NASim is that those actions may not accu-
rately replicate the real-world behavior. Although the
result of an action is determined by checking specific
conditions in the description file, it is important to rec-
ognize that other factors can also impact the success
of the action. Moreover, the network environment it-
self may not be accurately replicated in simulation,
including the configuration and topology of the net-
work. Therefore, while simulation can provide valu-
able insights into network security, real-world execu-
tion is the only way to determine the effectiveness of
penetration testing agents.
The Action/State Module in PenGym aims to
bridge this gap by enabling the actual execution of RL
agent actions in the target cyber range. The outcome
of each action is determined based on the current sta-
tus of the virtual machine (VM) host in the network
environment, reflecting the real conditions of the sys-
tem. The actions currently implemented in PenGym
cover the entire functionality of NASim as required
by the scope of the ‘tiny’ scenario used in our exper-
iments, and can be extended for other scenarios. The
PenGym action space is divided into six categories:
1. Service Scan
2. Operating System (OS) Scan
3. Subnet Scan
4. Exploit
PenGym: Pentesting Training Framework for Reinforcement Learning Agents
501

5. Process Scan
6. Privilege Escalation
For Service Scan, OS Scan and Subnet Scan,
the real action implementation leverages the Nmap
utility (Lyon, 2014) to retrieve information about
the services and operating system of each host, and
the accessible subnets. More specifically, we use
the python-nmap library (Norman, 2021) to control
Nmap via the Python programming language.
The Exploit and Privilege Escalation actions
leverage the Metasploit penetration testing framework
(Maynor, 2011) to actually execute the correspond-
ing actions on the real target hosts. In particular, we
use the pymetasploit3 library (McInerney, 2020) to
control Metasploit execution via Python.
As for Process Scan, it is implemented by using
the ps command from the Linux operating system.
Note that, in order to reduce the execution time of
the actual actions, after the first successful execution
of an action, the relevant information regarding the
result of that action is stored in a host map dictionary
and reused for subsequent executions. This dictionary
is used only for a single pentesting execution period
in testing. This period ends when the target hosts are
compromised or the step limit is exceeded. Similarly,
it is used for a single training time in training, which
ends when all the training epochs are finished. At
the beginning of each testing period or training time,
the dictionary is reset to an empty state. This ensures
that the optimization strategy does not affect the real-
ism of the overall training process or the evaluation of
trained agents during testing. It helps minimize time
by avoiding redundant actions that have already been
successful in the same period. This mimics real-world
situations where a pentester does not repeat successful
actions. Therefore, using the host map dictionary in
PenGym helps optimize execution time while main-
taining training realism. The following sections pro-
vide more details about each action implementation.
4.1 Service Scan
Service scanning is used to identify and provide de-
tails about the services that are running on a host. It
can also aid in the detection of potential vulnerabili-
ties in those services. To implement the Service Scan
action, we make use of the Nmap utility, which makes
it possible for PenGym to identify a wide range of ser-
vices, including web servers, SSH services, etc. Upon
success, the list of services running on the target host
is returned. The pseudocode for the implementation is
provided in Algorithm 1. Several arguments are used
to minimize the execution time of Nmap (-Pn to dis-
able ping use, -n to disable DNS resolution, and -T5
to enable the most aggressive timing template), and
-sS is used to enable TCP SYN scanning.
Algorithm 1: Service Scan Action.
Require: host, nmap, port=False
if port exist then
result ← nmap.scan(host,port,arguments
= ’Pn -n -sS -T5’)
else
result ← nmap.scan(host,arguments=’-Pn
-n -sS -T5’)
end if
service list ← list()
for host in result do
if host[port][state] is OPEN then
service list.append(service name)
end if
end for
Return service list
4.2 OS Scan
OS scanning is used to identify the operating system
that is running on a target host. This functionality
works by sending a series of probes to the target ma-
chine and analyzing the responses to determine the
characteristics of the operating system. The accuracy
of the scan results depends on the response from the
target machine and the effectiveness of the probing
technique used. The OS Scan action is implemented
via the Nmap utility. Upon success, the action will re-
turn the list of potential operating systems running on
the target host as identified Nmap. The pseudocode
for the implementation is provided in Algorithm 2.
In addition to time-optimization arguments, the argu-
ment -O is used to activate OS detection.
Algorithm 2: OS Scan Action.
Require: host, nmap, port=False
if port exist then
result ← nmap.scan(host,port,arguments
= ’-Pn -n -O -T5’
else
result ← nmap.scan(host,arguments=’-Pn
-n -O -T5’
end if
os list ← list()
for item in result do
os list.append(get os type(item))
end for
Return os list
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
502

4.3 Subnet Scan
Algorithm 3: Subnet Scan Action.
Require: subnet, nmap, port=False
host list ← list()
if port exist then
result ← nmap.scan(subnet,
port, arguments = ’-Pn -n -sS -T5
-minparallel 100 -maxparallet 100’)
for host in result do
if host[’tcp’][port][state] is OPEN
then
host list.append(host)
end if
end for
else
result ← nmap.scan(host, arguments
= ’-Pn -n -sS -T5 -minparallel 100
-maxparallel 100’)
for host in result do
if host[status][state] is UP then
host list.append(host)
end if
end for
end if
Return host list
Subnet scanning is a type of scan used to identify the
active hosts within a specified network range, so that
the potential targets in that subnet can be determined.
Nmap subnet scanning works by sending a ping mes-
sage to each IP address within the specified network
range and then analyzing the responses to determine
which hosts are active.
The Subnet Scan action in PenGym is imple-
mented by using Nmap to scan the specified net-
work range and retrieve the active hosts. Upon suc-
cess, the list of the discovered hosts is returned; note
that we differentiate between already discovered and
newly discovered hosts, so that new potential targets
can be easily identified. The implementation pseu-
docode is provided in Algorithm 3. In addition to time
optimization, -minparallel and -maxparallel are
used to enable the parallel probing of the hosts.
4.4 Exploit
Exploits are techniques for finding and taking advan-
tage of vulnerabilities in software or systems to gain
unauthorized access or perform malicious actions. A
successful exploit will result in the target machine be-
coming compromised, and further steps can be per-
formed, such as stealing sensitive data, installing mal-
ware, or taking control of the system. Therefore, ex-
ploits are critical components of the penetration test-
ing process for advancing towards a target.
In PenGym, the Exploit action is implemented via
the Metasploit (Maynor, 2011) framework. Upon suc-
cessful completion, the shell object that makes it pos-
sible to access the target host, and the access level
(typically “USER”) are returned. The returned shell
object can be used to execute shell commands or navi-
gate through the file system. The returned access level
can be used to determine what actions are allowed or
restricted for the current user. The pseudocode for
the implementation is provided in Algorithm 4. The
Exploit action is currently implemented via an SSH
exploit based on the dictionary attack technique.
Algorithm 4: SSH Exploit Action.
Require: host
msfprc ← get msfprc client()
shell ← check shell exist()
if shell exist then
shell ← get existed shell of host()
access level ← get host access level()
Return shell, access level
else
exploit ssh ← msfrpc.modules.use
(’auxiliary’,’auxiliary/scanner/ssh/
ssh login’)
exploit ssh[’rhost’] ← host
exploit ssh[’username’] ← username
exploit ssh[’pass file’] ← pass file
end if
result ← exploit ssh.execute()
shell ← get shell(result)
access level ← get host access level()
Return shell, access level
4.5 Process Scan
Process scanning enables pentesters to conduct a thor-
ough security assessment by identifying the processes
running on a target host. This is done in view of de-
termining which vulnerabilities can potentially be ex-
ploited for getting further control of the host, such as
via privilege escalation techniques. Note that process
scanning requires access to the target host, hence it is
executed after successfully gaining access to it.
The Process Scan implementation in PenGym uti-
lizes the shell object obtained via the Exploit action,
and uses it to execute the ps command, which collects
information about the processes running on the target
host; upon success, the list of processes is returned.
To speed up process information extraction, the -A
and -o options are used to reduce execution time by
extracting only essential user values associated with
PenGym: Pentesting Training Framework for Reinforcement Learning Agents
503

the running processes, minimizing unnecessary over-
head. This approach ensures a faster retrieval of pro-
cess information and simplifies subsequent manage-
ment of the extracted data (the implementation pseu-
docode is not included due to space limitations).
4.6 Privilege Escalation
Algorithm 5: Privilege Escalation Action.
Require: host
msfprc ← get msfprc client()
root shell ← check root shell exist()
normal shell id ← get normal shell id()
if root shell exists then
root shell ← get root shell()
access level ← get host access level()
Return root shell, access level
else
exploit pkexec ← msfrpc.modules.use
(’linux/local/cve 2021 4034 pkexec’)
exploit pkexec[’session’] ← shell id
payload ← ’meterpreter/reverse tcp’
end if
result ← exploit pkexec.execute()
root shell ← get shell(result)
access level ← get host access level()
Return root shell, access level
Privilege escalation is an essential step in pentesting
by which one attempts to gain administrator (root) ac-
cess on the target system. By obtaining a higher ac-
cess level than that of a regular user, a pentester gains
complete control of the target system and can perform
any actions on it. Privilege escalation is achieved
by exploiting specific vulnerabilities or misconfigu-
rations of the system to gain root level access. Note
that privilege escalation is conducted after success-
fully gaining regular user access to the target host.
The implementation of the Privilege Escalation
action utilizes the shell object obtained via the Ex-
ploit action to execute a privilege escalation ex-
ploit. In particular, we use the CVE-2021-4034
vulnerability in the pkexec program (National Vul-
nerability Database, 2021), for which a correspond-
ing module is implemented in Metasploit, named
linux/local/cve 2021 4034 pkexec. The imple-
mentation pseudocode is shown in Algorithm 5.
Optimizing the execution time of privilege escala-
tion is an important part of making PenGym run effi-
ciently, and we achieved this as follows:
• Disabled the AutoCheck attribute in Metasploit.
• Return the result of the privilege escalation func-
tion as soon as a meterpreter is created, instead of
waiting for the job to finish.
• Only clean the Metasploit sessions and jobs after
an attack sequence ends.
5 EXPERIMENTS
In this section we discuss first the main experiment
scenario, then the action implementation validation,
followed by several RL agent experiments.
5.1 Main Experiment Scenario
We used the scenario named ‘tiny’ defined in NASim,
which is illustrated in Figure 2, both for RL agent
training and testing. This scenario consists of three
hosts divided into three subnets. Subnet(1) is directly
connected to the Internet, and the other subnets are in-
ternally connected. Each host has the same basic con-
figuration, with a Linux OS, SSH service, and Tomcat
process. Firewall rules are enforced for secure com-
munication between subnets, and only SSH commu-
nication is allowed. Specifically, Subnet(1) is accessi-
ble from the Internet via SSH but cannot connect ex-
ternally. SSH access is allowed between subnets, ex-
cept for the connection from Subnet(1) to Subnet(2).
In practice, these restrictions were implemented via
the iptables Linux firewall configuration utility.
For experiment purposes, we used KVM technol-
ogy to create a network environment that is based on
the ‘tiny’ scenario. This environment included all the
configurations defined in this scenario, such as the
hosts and their settings, and the composition of the
subnets. In our experiments specific techniques are
used for exploits and privilege escalation. Namely, an
SSH dictionary attack is utilized to login to hosts, and
a pkexec vulnerability is used to obtain root access.
User accounts and passwords were set up accordingly
on the target hosts to enable these actions. The ex-
periments were conducted on a dual 12-core 2.2 GHz
Intel(R) Xeon(R) Silver 4214 CPU server with 64 GB
RAM. The NASim version we utilized was v0.10.0.
5.2 Action Implementation Validation
Table 2 provides a summary of the action implemen-
tation in NASim and PenGym, with differences high-
lighted in bold font. We also show the action execu-
tion times (for PenGym only for the very first exe-
cution of an action within a session, since we cache
the output data to speed up subsequent execution).
Next we discuss the validation of action implemen-
tations in PenGym to demonstrate their equivalence
with NASim actions in terms of observations.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
504
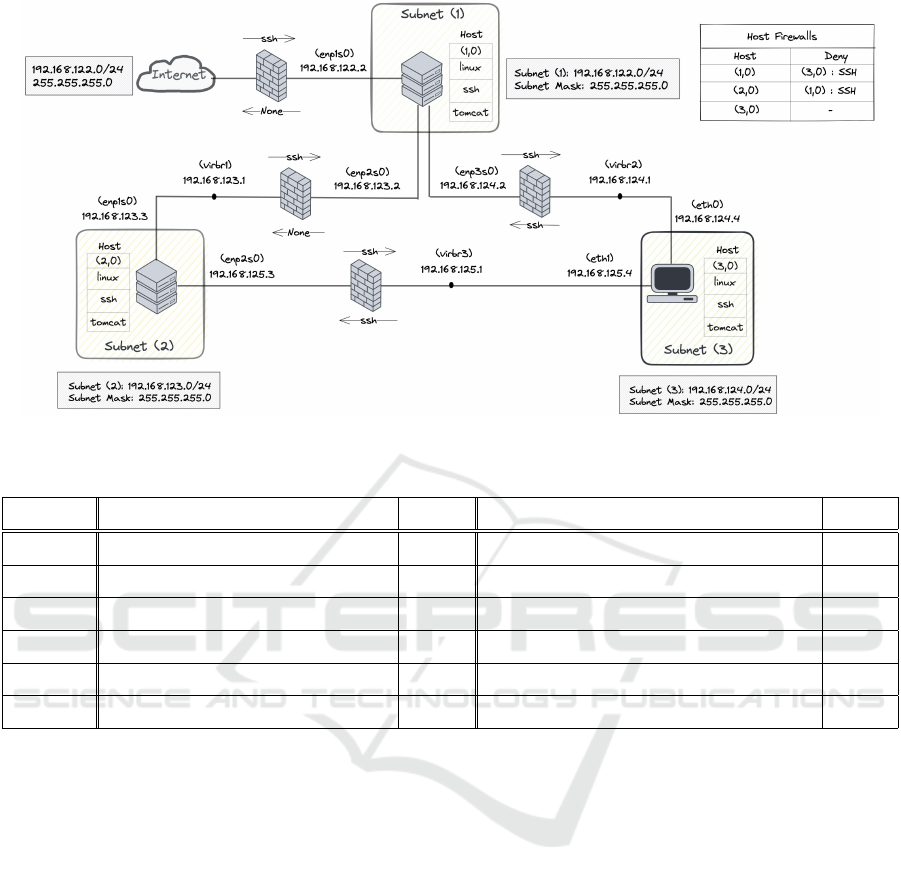
Figure 2: Cyber range constructed in PenGym based on the ‘tiny’ scenario in NASim.
Table 2: Comparison of action implementation and execution time between NASim and PenGym.
Action NASim Implementation
Execution
Time [s]
PenGym Implementation
Execution
Time [s]
OS Scan
Check if the host is discovered and
return its configured OS type
0.000006
Check if the host is discovered and
scan the OS type using nmap
3.642790
Service Scan
Check if the host is discovered and
return its configured services
0.000004
Check if the host is discovered and
scan the running services using nmap
0.274271
Exploit
Check if the host is discovered and
probabilistically update its state to “compromised”
0.000023
Check if the host is discovered and
execute an SSH dictionary attack to compromise it
1.217554
Subnet Scan
Check if the host is compromised and
return the connected hosts within the subnet
0.000028
Check if the host is compromised and
scan the connected hosts within its subnet using nmap
2.486091
Process Scan
Check if the host is compromised and
return its configured processes
0.000005
Check if the host is compromised and
scan the running processes using ps
0.256476
Privilege
Escalation
Check if the host is compromised and
update the access level of the host to ROOT
0.000021
Check if the host is compromised and
execute privilege escalation via a pkexec vulnerability
13.174906
Service Scan. In the context of the ‘tiny’ scenario,
the target service that needs to be determined is SSH.
To use the Service Scan action, the target host value
must be provided, while the port value is optional. For
SSH, we provide port 22 in order to minimize the time
spent scanning unused ports. When the Service Scan
action is executed, it scans the specified host for open
ports and matches them to the assigned port value, if
it exists. The observations after executing the service
scan (Algorithm 1) are equivalent in the NASim and
PenGym environments, as follows:
• NASim: {’ssh’: 1.0}, where 1.0 means True
• PenGym: [’ssh’]
OS Scan. For the OS scan in the ‘tiny’ scenario, the
target operating system that needs to be determined
is Linux. To minimize execution time, only port 22
is provided as an optional value for scanning. If the
corresponding ports are open and match the assigned
port value, a list of the ascertained operating systems
is returned. The observations after executing the OS
scan (Algorithm 2) are equivalent in the NASim and
PenGym environments (details were not included due
to space limitations).
Subnet Scan. PenGym uses Nmap to execute sub-
net scans to identify active hosts within a subnet, and
returns a list with the IP addresses of all the inter-
faces of those active hosts. Using the subnet scan ex-
ecution on Host(1,0) as an example, the observations
after running the action (Algorithm 3) for the ‘tiny’
scenario are equivalent in the NASim and PenGyn en-
vironments, as follows:
• NASim: discovered={(1, 0): True,
(2, 0): True, (3, 0): True}
• PenGym:
[’192.168.122.1’, ’192.168.122.2’,
’192.168.123.1’, ’192.168.123.2’,
’192.168.123.3’, ’192.168.124.1’,
’192.168.124.4’, ’192.168.125.1’,
’192.168.125.3’, ’192.168.125.4’]
PenGym: Pentesting Training Framework for Reinforcement Learning Agents
505
The subnet scan function in Nmap can be per-
formed with different arguments, which greatly affect
the execution time. Using only the basic -sS argu-
ment takes about 100 seconds to complete. How-
ever, by using the -Pn option to skip host discov-
ery, the -n option to disable DNS resolution, and the
-T5 timing template, the scan time can be reduced
to about 10 seconds. In addition, the -minparallel
and -maxparallel options can be used to control the
number of concurrent connections. When all the opti-
mization arguments in Algorithm 3 are used, the scan
takes only 2.49 seconds. This shows the importance
of carefully selecting the command arguments when
performing such time-consuming actions.
Exploit. The PenGym exploit action employs an
SSH dictionary attack with a username and password
list to gain access to the target host, which is imple-
mented via Metasploit. If the exploit is successful, a
Metasploit shell object is returned together with the
determined access level: USER or ROOT. This shell
object can be used for subsequent actions, such as
process scanning and privilege escalation, to investi-
gate and exploit potential vulnerabilities. The obser-
vations after executing the Exploit action (Algorithm
4) on the hosts in the ‘tiny’ scenario are equivalent in
NASim and PenGym:
• NASim: access=USER
• PenGym: shell object, access=USER
Process Scan. Process scanning is implemented by
executing the ps command that scans for active pro-
cesses on the target host. This command is executed
via the shell previously obtained on the targeted host
through an exploit, and returns a list of running pro-
cesses that are consistent with the scenario descrip-
tion. The observations after executing the Process
Scan action are equivalent in NASim and PenGym
(details were not included due to space limitations).
Privilege Escalation. Privilege escalation is imple-
mented by attacking vulnerabilities in the pkexec
package via Metasploit to gain root access on a tar-
get host. This requires having a pkexec package
with a version lower than 0.12 and the Ubuntu 20.04
TLS operating system. The observations after execut-
ing the Privilege Escalation action (Algorithm 5) are
equivalent in NASim and PenGym (details were not
included due to space limitations).
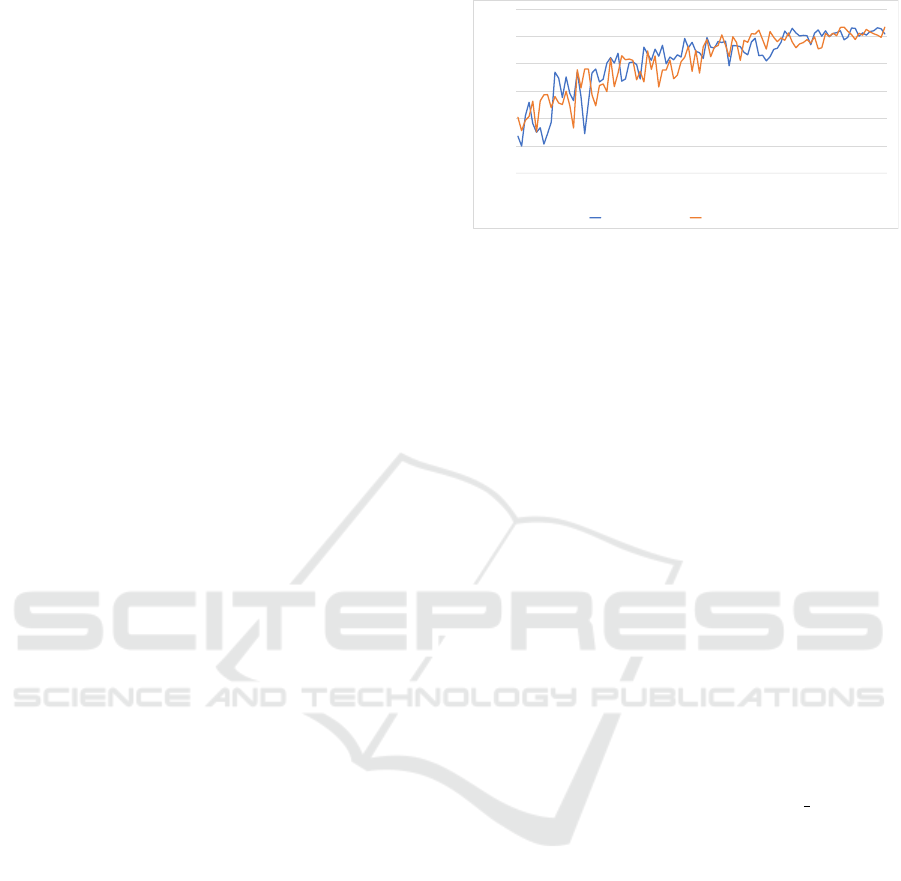
80
100
120
140
160
180
200
0 10 20 30 40 50 60 70 80 90 100
Reward
Episode Number
NASim environment PenGym environment
Figure 3: The average reward versus episode number for an
RL agent trained in the NASim and PenGym environments.
5.3 RL Agent Experiments
We conducted a series of experiments to demonstrate
the feasibility and effectiveness of PenGym. For this
purpose, we selected NASim for comparison to show-
case the key differences between the emulation ap-
proach of PenGym and the simulation approach of
NASim. The RL agents were trained and tested us-
ing both NASim and PenGym as discussed below.
Agent Training. First, we independently trained 5
agents for each of the NASim and PenGym environ-
ments. Each training consisted of 100 episodes, re-
sulting in a total of 5 trained agents for each environ-
ment. We used the tabular, epsilon-greedy Q-learning
algorithm with experience replay (Sutton and Barto,
2018) in NASim, since preliminary experiments have
shown that it has superior performance compared to
the other sample algorithms included.
A slightly modified ‘tiny’ scenario was used to
create the training environment in this experiment.
Thus, the probability attribute of the e ssh action
(Exploit), was set to 0.999999; this provides a sce-
nario that is closer to our cyber range, where the ex-
ploit does not fail (note that we used this value be-
cause the value 1.0 could not be assigned due to a
NASim implementation quirk).
Figure 3 shows the average rewards obtained by
training the 5 RL agents in each of the NASim and
PenGym environments over 100 episodes. Accord-
ing to our results, the PenGym framework has shown
comparable results in training agents in terms of re-
wards. As for and training time, PenGym took on
average 113.12 s compared to 45.12 s for NASim. Al-
though the training time in PenGym is longer, it is still
within reasonable limits, especially considering that
training is done in a cyber range, not via simulation.
Agent Testing. Next, the performance of the 5
trained agents for each of the NASim and PenGym
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
506

environments was evaluated by conducting 20 exper-
iments with the ‘tiny’ scenario in which the trained
agents were used to conduct pentesting in either the
NASim or PenGym environments. In addition, the
brute force and random agents made available in
NASim were also included in the evaluation, under-
going 20 trials in both environments as well.
The experiment results are summarized in Table 3.
The results of the 20 trials were averaged to derive the
final performance metrics for the agents in each envi-
ronment. To assess the consistency and variability of
the results, we also computed the standard deviation
for each test case to provide insights into the stability
and reliability of each agent performance across dif-
ferent trials. The results show that all the 5 trained
agents in both the NASim and PenGym environments
were able to successfully reach the pentesting goal in
each of the 20 test trials, resulting in a 100% success
rate for all the agents.
The results show that agents trained in NASim re-
quired more steps to reach the goal (12.42 and 11.95
steps) than the agents trained in PenGym (7.99 and
7.72 steps). This can be explained by the fact that
agents trained in NASim rely on probabilistic values
to model action success/failure. Thus, such actions
can fail due to randomly generated values that vary
each time the action is executed. In contrast, agents
trained in PenGym execute real actions in the envi-
ronment, leading to success based on realistic con-
ditions. Moreover, the agents trained in PenGym
demonstrated very good performance, with an aver-
age of 7.79 steps compared to the optimal 6 steps of
the ‘tiny’ scenario. The relatively poor performance
of the agents trained in NASim arises from the pres-
ence of a poorly trained agent, which reduced the
average performance of those agents during testing.
Additionally, testing in PenGym resulted in slightly
better performance than testing in NASim, with 7.99
steps compared to 7.72 steps, for example. As for
the brute force and random agents, they also exhibited
comparable performance in the NASim and PenGym
environments, but their results were far from optimal.
The main advantage of PenGym lies in its ability
to facilitate training with real actions in an actual en-
vironment. This eliminates the need for modeling ac-
tions using execution assumptions and success proba-
bilities, as observations come from the execution of
real actions. By executing actions without consid-
ering probabilistic factors, agents trained in PenGym
improve their algorithm based on realistic results. For
example, the success of an SSH-based exploit action
executed in NASim is determined by a random value.
This means it may fail at unexpected times, which
does not accurately reflect realistic actions, and leads
to non-deterministic effects on agent learning—which
does not happen when using PenGym. As the sys-
tem grows, the action space becomes larger, and these
probabilistic factors may affect the learning process
of the agents in unknown ways. Therefore, our ap-
proach ensures a more realistic representation of the
security dynamics in the network.
However, one drawback of PenGym is its longer
execution time compared to the simulation-based
NASim environment, since actions are physically ex-
ecuted in the network. Nonetheless, we consider the
extended training duration reasonable given that the
training takes place in a realistic cyber range. More-
over, the full automation ensures that the execution
time should be lower than human-based pentesting
and red team exercises, which often take weeks or
even months (Li et al., 2022).
5.4 Additional RL Agent Experiments
To demonstrate the potential of PenGym in adapt-
ing to more complex network environments, we
also conducted several additional experiments us-
ing higher complexity scenarios, such as ‘tiny-hard’,
‘tiny-small’, ‘small-honeypot’ and ‘small-linear’.
For example, the ‘small-linear’ scenario consists
of 6 subnets and 8 hosts, and its action space includes
a total of 72 available actions. Most hosts have sev-
eral services and processes, which correspond to mul-
tiple service-based and process-based actions within
the host. To increase the challenge of the scenario,
some hosts do not have any processes, and the num-
ber of firewalls is also higher.
We trained an agent using the same algorithm
mentioned in Section 5.3 for both the NASim and
PenGym environments. The training process involved
500 epochs for the ‘small-linear’ scenario, and 150
epochs for the other scenarios, which was enough to
allow the agent performance to stabilize.
According to the results in Table 4, PenGym train-
ing took approximately two to three times longer than
for NASim. In the simple ‘tiny’ scenario, the ratio
between PenGym and NASim was around 2.5. How-
ever, as the network size and complexity increased,
the ratio decreased to less than 2.5. Thus, the train-
ing time ratio was 1.7 for the ‘tiny-small’ scenario,
1.4 for the ‘small-honeypot’ scenario, and 2.2 for the
‘small-linear’ scenario. This suggests that more com-
plex scenarios lead to a lower comparative training
time in PenGym, a property that we attribute to the
more significant effect of our optimization methods
when a larger number of actions is repeated.
Table 4 also shows the total number steps that
were taken to reach the pentesting goal. These results
PenGym: Pentesting Training Framework for Reinforcement Learning Agents
507
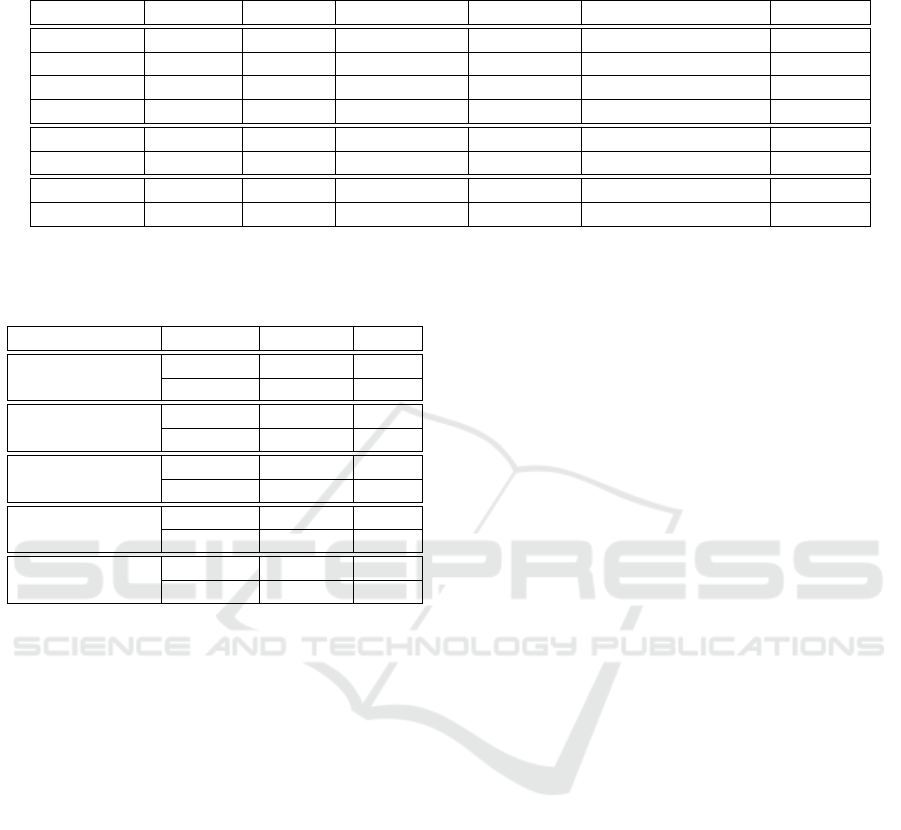
Table 3: Comparison of the execution performance of the RL agents trained and tested in the NASim and PenGym environ-
ments; brute force and random agents are also included for reference.
Agent Training Testing Success Rate Avg. Steps Avg. Exec. Time [s] Std. Dev.
RL NASim NASim 20/20 12.42 0.0025 6.081
RL NASim PenGym 20/20 11.95 45.8329 5.046
RL PenGym NASim 20/20 7.99 0.0016 0.229
RL PenGym PenGym 20/20 7.72 43.1357 0.219
Brute force N/A NASim 20/20 47.00 0.0022 0.000
Brute force N/A PenGym 20/20 47.00 58.0670 0.000
Random N/A NASim 20/20 102.30 0.0048 38.134
Random N/A PenGym 20/20 94.80 62.0402 53.121
Table 4: Comparison of the training time and step count of
the RL agents trained in the NASim and PenGym environ-
ments for several additional scenarios.
Scenario Training Time [s] Steps
tiny
NASim 45.12 15
PenGym 113.12 11
tiny-hard
NASim 68.49 8
PenGym 198.75 13
tiny-small
NASim 316.99 9
PenGym 539.35 10
small-honeypot
NASim 1680.45 14
PenGym 2456.82 8
small-linear
NASim 2091.45 17
PenGym 4771.25 24
are recorded from the last training epoch for reference
purposes, so they do not necessarily indicate the over-
all performance of those agents. Overall, these ex-
periments demonstrate the positive characteristics of
PenGym in terms of training performance when deal-
ing with more complex scenarios.
6 DISCUSSION
This paper thoroughly demonstrated the use of a cy-
ber range based on the ‘tiny’ scenario in NASim for
realistic RL agent training. However, this scenario
has certain limitations, such as small size and simple
scope, that prevent it from being an accurate reflec-
tion of real-world circumstances. As a result, agent
performance in actual cyberattacks may be overesti-
mated when using this scenario, masking issues that
would become apparent in more complex settings.
Nevertheless, the ‘tiny’ scenario includes all the ba-
sic necessary components of a real environment, such
as hosts, subnets, firewalls, and connections between
subnets. Therefore, the use of this scenario to demon-
strate the feasibility and potential of utilizing the real
PenGym environment in comparison with simulation
environments is fully justified. To further increase the
effectiveness and generality of PenGym, more com-
plex network environments need to be recreated.
In addition, the evaluation of the trained agents
when conducting pentesting demonstrates the effec-
tiveness of PenGym, with the PenGym trained agents
achieving a slightly lower average step count com-
pared to NASim trained ones. Moreover, the aver-
age pentesting execution times were acceptable, being
less than about 45 s for the trained RL agents.
Furthermore, in the ‘tiny’ scenario privilege esca-
lation is supposed to be achieved via the Tomcat pro-
cess. However, to the best of our knowledge, it is not
possible to gain root access directly by attacking vul-
nerabilities in the Tomcat process, at least in recent
OSes. Instead, the Tomcat process can be used as an
intermediate step to obtain a Meterpreter shell, then
root access can be gained by exploiting local operat-
ing system vulnerabilities through Meterpreter. Such
an implementation would eliminate the need to first
exploit the host to get access to it, so it would change
the built-in sequence of actions in NASim. To address
this issue, in PenGym we used instead a new method
for privilege escalation, which uses a vulnerability in
the pkexec package to gain administrative access to
the target hosts, as previously mentioned. This mod-
ification enables PenGym to follow a realistic attack
scenario that is still in accordance with NASim as-
sumptions, which was important to do currently to
make their comparison possible.
We envision that PenGym could be integrated
into current cybersecurity practices, since RL agents
trained via PenGym can mimic attacker strategies and
actions in a realistic manner. This integration would
make possible the automation of pentesting in the fu-
ture, as RL agents trained via PenGym could assist
pentesters in their work, further improving the effec-
tiveness of cybersecurity assessment.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
508

7 CONCLUSION
In this paper, we introduced PenGym, a framework
for creating real environments to support training
RL agents for penetration testing purposes. By en-
abling the execution of real actions with real obser-
vations, PenGym eliminates the need for the proba-
bilistic modeling of actions, resulting in a more ac-
curate representation of security dynamics compared
to simulation-based environments. Since PenGym
agents are trained in a cyber range, they experience
actual network conditions. This approach potentially
enhances the applicability of the trained agents when
they are deployed in a real-world infrastructure.
The framework has been validated and refined
through several experiments, demonstrating the cor-
rectness of the action implementation, as well as the
fact that PenGym can provide reliable results and rea-
sonable execution times for training. Although the
PenGym training times are longer than those of simu-
lation environments (e.g., 113.12 s versus 45.12 s on
average in our experiments when using the ‘tiny’ sce-
nario), we consider that this value is reasonable given
the actual cyber range and network use.
The PenGym framework was released on GitHub
(https://github.com/cyb3rlab/PenGym) as open
source. We plan to add support for more complex en-
vironments, thus enabling users to simulate more re-
alistic and larger scenarios that would make possible
more comprehensive testing and analysis.
In addition, we aim to improve the cyber range
creation method, which is currently mainly a manual
process that is time-consuming and cumbersome. Our
next goal is to automate cyber range creation by lever-
aging the functionality of the open-source CyTrONE
framework (Beuran et al., 2018), so that the creation
process is streamlined and more efficient.
REFERENCES
Beuran, R., Tang, D., Pham, C., Chinen, K., Tan, Y., and
Shinoda, Y. (2018). Integrated framework for hands-
on cybersecurity training: CyTrONE. Computers &
Security, 78C:43–59.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nAI Gym. arXiv:1606.01540.
Chaudhary, S., O’Brien, A., and Xu, S. (2020). Automated
post-breach penetration testing through reinforcement
learning. In 2020 IEEE Conference on Communica-
tions and Network Security (CNS), pages 1–2. IEEE.
Furfaro, A., Piccolo, A., Parise, A., Argento, L., and Sacca,
D. (2018). A cloud-based platform for the emulation
of complex cybersecurity scenarios. Future Genera-
tion Computer Systems, 89:791–803.
Ghanem, M. C. and Chen, T. M. (2018). Reinforcement
learning for intelligent penetration testing. In 2018
Second World Conference on Smart Trends in Sys-
tems, Security and Sustainability (WorldS4), pages
185–192.
Li, L., El Rami, J.-P. S., Taylor, A., Rao, J. H., and
Kunz, T. (2022). Enabling a network AI gym for au-
tonomous cyber agents. In 2022 International Con-
ference on Computational Science and Computational
Intelligence (CSCI), pages 172–177. IEEE.
Lyon, G. (2014). Nmap security scanner. https://nmap.org/.
Maynor, D. (2011). Metasploit toolkit for penetration test-
ing, exploit development, and vulnerability research.
Syngess Publishing, Elsevier.
McInerney, D. (2020). Pymetasploit3.
https://pypi.org/project/pymetasploit3/.
Microsoft Defender Research Team (2021). CyberBat-
tleSim. https://github.com/microsoft/cyberbattlesim.
Created by Christian Seifert, Michael Betser, William
Blum, James Bono, Kate Farris, Emily Goren, Justin
Grana, Kristian Holsheimer, Brandon Marken, Joshua
Neil, Nicole Nichols, Jugal Parikh, Haoran Wei.
Molina-Markham, A., Miniter, C., Powell, B., and Rid-
ley, A. (2021). Network environment design for au-
tonomous cyberdefense. arXiv:2103.07583.
National Vulnerability Database (2021). CVE-2021-4034.
https://nvd.nist.gov/vuln/detail/CVE-2021-4034.
Accessed: May 2, 2023.
Norman, A. (2021). Python-nmap.
https://pypi.org/project/python-nmap/.
Pozdniakov, K., Alonso, E., Stankovic, V., Tam, K., and
Jones, K. (2020). Smart security audit: Reinforce-
ment learning with a deep neural network approxima-
tor. In 2020 International Conference on Cyber Sit-
uational Awareness, Data Analytics and Assessment
(CyberSA), pages 1–8.
Schwartz, J. and Kurniawati, H. (2019). Autonomous
penetration testing using reinforcement learning.
arXiv:1905.05965.
Standen, M., Lucas, M., Bowman, D., Richer, T. J., Kim, J.,
and Marriott, D. (2021). Cyborg: A gym for the devel-
opment of autonomous cyber agents. In Proceedings
of the 1st International Workshop on Adaptive Cyber
Defense.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
The MITRE Corporation (2018). Brawl. https://github.com
/mitre/brawl-public-game-001.
Zhou, S., Liu, J., Hou, D., Zhong, X., and Zhang, Y. (2021).
Autonomous penetration testing based on improved
deep Q-network. Applied Sciences, 11(19).
PenGym: Pentesting Training Framework for Reinforcement Learning Agents
509
