Real-Time Bus Arrival Prediction: A Deep Learning Approach for
Enhanced Urban Mobility
Narges Rashvand
1
, Sanaz Sadat Hosseini
2
, Mona Azarbayjani
3
and Hamed Tabkhi
1
1
Department of Electrical and Computer Engineering, University of North Carolina at Charlotte, Charlotte, NC, U.S.A.
2
Department of Civil and Environmental Engineering, University of North Carolina at Charlotte, Charlotte, NC, U.S.A.
3
Department of Architecture, University of North Carolina at Charlotte, Charlotte, NC, U.S.A.
Keywords:
Neural Network, Feature Selection, Bus Arrival Time, Support Vector Regression.
Abstract:
In urban settings, bus transit stands as a significant mode of public transportation, yet faces hurdles in deliver-
ing accurate and reliable arrival times. This discrepancy often culminates in delays and a decline in ridership,
particularly in areas with a heavy reliance on bus transit. A prevalent challenge is the mismatch between ac-
tual bus arrival times and their scheduled counterparts, leading to disruptions in fixed schedules. Our study,
utilizing New York City bus data, reveals an average delay of approximately eight minutes between scheduled
and actual bus arrival times. This research introduces an innovative, AI-based, data-driven methodology for
predicting bus arrival times at various transit points (stations), offering a collective prediction for all bus lines
within large metropolitan areas. Through the deployment of a fully connected neural network, our method
elevates the accuracy and efficiency of public bus transit systems. Our comprehensive evaluation encompasses
over 200 bus lines and 2 million data points, showcasing an error margin of under 40 seconds for arrival time
estimates. Additionally, the inference time for each data point in the validation set is recorded at below 0.006
ms, demonstrating the potential of our Neural-Net based approach in substantially enhancing the punctuality
and reliability of bus transit systems.
1 INTRODUCTION
Over the last half-century in the US, the share of
workers commuting via public transportation has
dwindled. This decline is largely ascribed to govern-
mental separation of land-use development planning
from transportation, fueling suburban sprawl, uneven
public service distribution, and escalating car reliance
in many American cities (Freemark, 2021; Pulugurtha
et al., 2022). Despite concerted efforts over re-
cent decades to bolster public transportation, rider-
ship in the United States hasn’t witnessed a significant
uptick, falling below anticipated levels. This stagna-
tion is driven by factors such as urban sprawl, sub-
urbanization, private car ownership, low fuel prices,
cutbacks in transit services, and the emergence of
ride-hailing giants like Uber and Lyft (Erhardt et al.,
2022; Graehler et al., 2019).
The recent COVID-19 pandemic has further exac-
erbated the decline in bus ridership across the coun-
try, deteriorating the situation from its prior state. The
American Public Transportation Association (APTA)
notes a stark reduction in transit usage due to the pan-
demic, with a downturn of over 50 percent between
2019 and 2020 (Figure 1). However, there’s a silver
lining post-pandemic; public transportation ridership
in the U.S. has rebounded from 19% in April 2020
to 72% in September 2022, marking the highest level
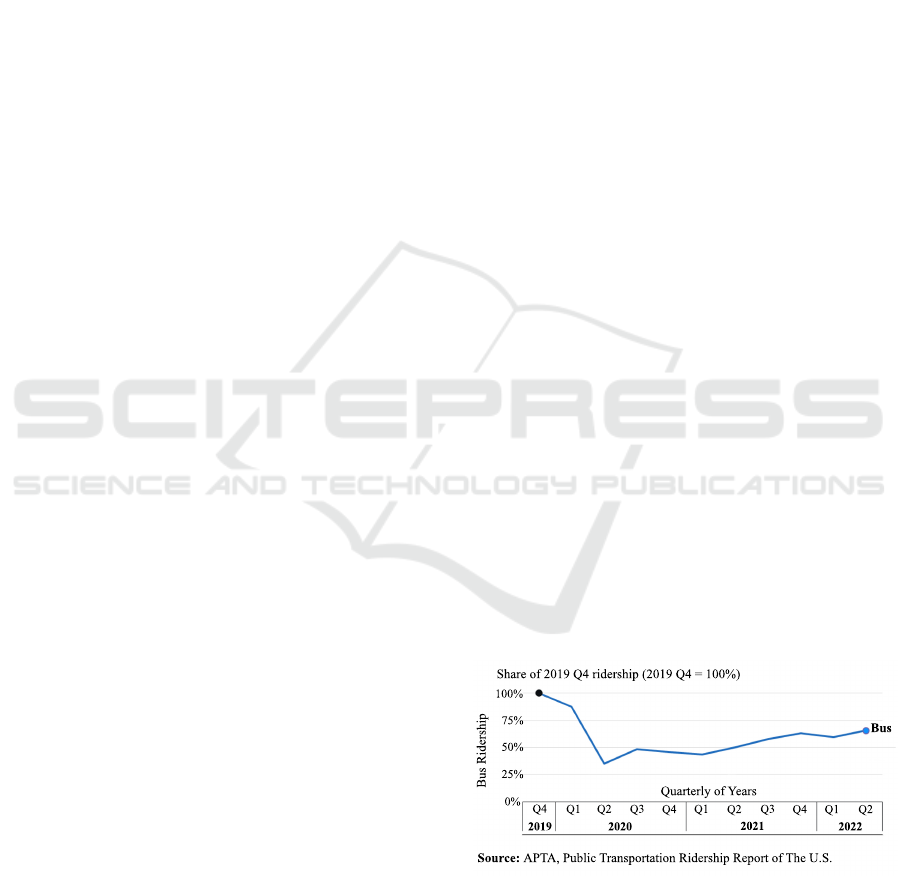
since 2019 (Mallett, 2022; APT, 2022).
Bus Ridership
Quarterly of Years
Share of 2019 Q4 ridership (2019 Q4 = 100%)
Bus
Q4
Q1 Q2 Q3
Q4
Q1
Q2
Q3
Q4 Q1 Q2
2019 2020
2021
100%
75%
50%
25%
0%
2022
Source: APTA, Public Transportation Ridership Report of The U.S.
Figure 1: Quarterly Public Bus Transportation Ridership in
the U.S. In 2020 and 2021, public transportation ridership
was less than half its pre-pandemic level. While bus rid-
ership has recovered somewhat, it was much lower in the
second quarter of 2022 than in the final pre-pandemic quar-
ter. Bus ridership for commuters grew by 66% in the second
quarter of 2022 (Mallett, 2022).
Rashvand, N., Hosseini, S., Azarbayjani, M. and Tabkhi, H.
Real-Time Bus Arrival Prediction: A Deep Learning Approach for Enhanced Urban Mobility.
DOI: 10.5220/0012365500003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 123-132
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
123

The burgeoning discourse around smart cities has
piqued the interest of scholars across diverse fields
(Pazho et al., 2023; Gholami et al., 2023; Noghre
et al., 2022). Central to the smart city paradigm
is transit reliability, a critical consideration for com-
muters aiming to minimize long commutes and wait-
ing times on public transit.
To cater to individuals heavily reliant on public
transit, developed cities globally are honing their tran-
sit scheduling systems. As previously discussed, nu-
merous factors can influence transit ridership, with
service predictability being paramount to mitigate un-
due wait times and enhance trip planning reliability
(Pulugurtha et al., 2022; Sen et al., 2022). Unre-
liable transit services can thwart commuters’ travel
plans, potentially prompting a shift to alternative
transportation modes like personal vehicles. Op-
erational uncertainties and delays may erode tran-
sit users’ confidence, resulting in reduced ridership
and increased dependence on alternative transporta-
tion modes. Such unreliable services compel transit
users to allocate more time for waiting, culminating in
extended wait durations at transit stops (Xu and Ying,
2017; Huang et al., 2022; Zhong et al., 2020).
Many cities have rolled out dedicated mobile ap-
plications for bus transit, furnishing schedules and
aiding passengers in pre-planning their journeys (Fu
et al., 2014). However, the absence of real-time infor-
mation in these apps often vexes passengers attempt-
ing to plan their commute. A sizeable number of
commuters resort to other applications (e.g., Google
Maps or Waze (spl, 2023)) for planning their tran-
sit. Nonetheless, these applications, reliant on crowd-
sourced information, often fall short in providing req-
uisite accuracy and don’t liaise with local bus transits
to bolster scheduling and operational efficiency (spl,
2023).
Public transit holds the promise of delivering real-
time estimated arrival times akin to private sector
ride-sharing platforms like Uber or Lyft (Chen et al.,
2015; TSG, 2019). Smart, data-driven stratagems
could potentially elevate predictability and efficiency
across public bus transit systems, mirroring the reli-
ability and predictability seen in Uber/Lyft. The req-
uisite steps encompass regional data gathering, anal-
ysis, pattern discernment, and forecasting to augment
arrival time accuracy and bus trip planning across the
entire network. By doing so, transit authorities could
potentially boost ridership, fostering a more sustain-
able and cost-effective alternative to personal vehicle
use, thereby contributing to a greener and more equi-
table society (Diab et al., 2015; tel, 2017).
This manuscript unveils a deep-learning-centric
model for predicting bus arrival times, employing
a unified Fully Connected Neural Networks (FC-
NNs) framework based on historical and environmen-
tal data. This model exhibits robust scalability and
generalization across numerous bus lines within iden-
tical transit networks, surpassing the capabilities of
classical machine learning methodologies. Utilizing
the New York City Bus System Dataset, encompass-
ing over 200 bus lines and 2 million data points, we
conducted our analysis.
Our findings elucidate that our AI-powered model,
anchored in FCNNs, significantly curtails the aver-
age estimated error in bus arrival times to 40 seconds,
a noteworthy improvement compared to the average
delay times in the dataset. Per our study, FCNNs
outshine traditional machine learning approaches like
SVR in tackling transportation conundrums with ex-
tensive input features.
The quintessence of this endeavor is to seamlessly
assimilate the developed model into existing public
bus transit mobile applications, as depicted in Figure
2, with the overarching aim of enriching the bus tran-
sit experience. By leveraging this methodology, we
aspire to substantially diminish waiting times for pas-
sengers, thereby enhancing their commuting experi-
ence.
In summary, the contributions of this paper en-
compass:
• The introduction of a unified, deep-learning-based
Fully Connected Neural Network (FCNN) frame-
work aimed at predicting bus arrival times across
numerous bus lines within a singular bus transit
network.
• The thorough assessment of the proposed model’s
accuracy utilizing the expansive New York City
Bus System Dataset, which comprises more than
200 bus lines and 2 million data points.
• The illustration of our methodology’s superior
scalability and generalization capabilities when
juxtaposed with classical machine learning mod-
els such as Support Vector Machines.
The rest of this paper is structured as follows: The
subsequent section is devoted to bus arrival time
prediction literature review. The preliminaries and
dataset section contains a detailed description of the
dataset used in this study and some exploratory data
analysis. Our methodology is illustrated in the pro-
posed neural network methodology section. Finally,
our model is validated, and we present our conclu-
sions in the last section.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
124

Scheduled
Arrival Time
Expected
Arrival Time
12: 45 PM
12: 51 PM
Scheduled
Arrival Time
Real-time location of the bus
Cloud Server
Update current
bus location
Update bus arrival time
to application
Expected
Arrival Time
12: 45 PM
12: 51 PM
Figure 2: Integrating an AI prediction model into a mobile bus app enhances user experience and operational efficiency.
Our model predicts bus arrival times using diverse data sources, providing real-time precision. Users can easily access these
predictions via cloud-based services for a reliable travel experience.
2 RELATED WORKS
Our objective in this section is to assess the efficiency
of examples similar to our research demonstrating
how data-driven approaches can be used for bus tran-
sit systems, arrival time prediction, and scheduling
optimization. Public transportation is a crucial com-
ponent of a connected and smart community. There-
fore, citizens demand real-time information regard-
ing transportation assets’ arrival and departure. In
many cities worldwide, intelligent transportation sys-
tems with demand-responsive services are being im-
plemented to bridge the gap between public trans-
portation and private cars. In some early research,
data analytics has been used to optimize public bus
schedules and minimize passenger wait times.
Different technologies can be utilized that could
generate real-time data for bus arrival time prediction.
Among them, Global Positioning Systems (GPS), Au-
tomatic Passengers Counter Systems (APCS), and
Crowdsensing solutions in which users cooperate
with the system through a mobile application are the
most popular ones (Gaikwad and Varma, 2019; Yin
et al., 2017).
The problem of bus arrival time prediction was
studied by considering different models and various
essential factors. In a study by N. Gaikwad and S.
Varma (Gaikwad and Varma, 2019), the crucial fea-
tures for bus arrival time prediction and standard eval-
uation metrics were presented. The main factors af-
fecting bus arrival time are the source, destination,
bus location coordinates, traffic density, stop-to-stop
distance, workday, and so on.
In another study by Rafidah Md.(Noor et al.,
2020), bus arrival time was predicted using the Sup-
port Vector Regression (SVR) model. Petaling Jaya
City Bus data was used in this study, including a se-
quence of bus stations, bus station names, the coordi-
nates of the bus stations, timestamps, and the distance
covered from the previous station to the next station.
They also implemented their prediction model with
and without weather data and showed that adding
weather parameters for their dataset shows a negligi-
ble difference in their prediction error.
Also, a study by F. Sun, Y. Pan, J. White, and A.
Dubey (Sun et al., 2016) introduced a public trans-
portation decision support system for short-term and
long-term prediction of arrival bus times. This study
used the real-world historical data of two Nashville
bus system routes. The approach of this research
combined the clustering analysis and Kalman filters
with a shared route segment model to produce more
accurate arrival time predictions and, based on their
results, compared to the basic arrival time prediction
model that Nashville MTA was using, their system
reduced arrival time prediction errors by 25% on av-
erage when predicting the arrival delay an hour ahead
and 47% when predicting within a 15-minute future
Real-Time Bus Arrival Prediction: A Deep Learning Approach for Enhanced Urban Mobility
125

time window (Sun et al., 2016).
S. Basak, F. Sun, S. Sengupta, and A. Dubey
have conducted a similar study (Dubey et al., 2019),
using unsupervised clustering mechanisms to opti-
mize transit on-time performance. As a local case
study, they analyzed the monthly and seasonal delays
of the Nashville metro region and clustered months
with similar patterns. In this paper, they presented
a stochastic optimization toolchain along with sensi-
tivity analyses for choosing the optimal hyperparam-
eters, and they solved the optimization problem by
using a single-objective optimization task as well as
a greedy algorithm, a genetic algorithm (GA), and a
particle swarm optimization (PSO) algorithm (Dubey
et al., 2019).
According to the newest research in (Sun et al.,
2019), dynamic data-driven application systems
(DDDAS) that use real-time sensors and a data-driven
decision support system can provide online model
learning and multi-time-scale analytics to enhance the
system’s intelligence. As part of their study, the au-
thors analyzed an online bus arrival prediction system
in Nashville using historical and real-time streaming
data, which can be packaged as modular, distributed,
and resilient micro-services. The long-term delay
analysis service excludes noise from outliers in his-
torical data to identify delay patterns associated with
different hours, days, and seasons for specific time
points and route segments. City planners can use the
feedback data generated by these analytics services to
improve bus schedules and increase rider satisfaction
(Sun et al., 2019).
In addition, another study by S. Nannapaneni and
A. Dubey (Nannapaneni and Dubey, 2019) researched
rerouting a single bus to serve spatially and tempo-
rally better changing travel demands. The aim was to
propose a flexible framework for public transit rerout-
ing. The study was demonstrated on Route 7 of the
Nashville Metropolitan Transit Authority (MTA). The
authors identified several flex stops with high travel
demand using clustering since people living far from
bus routes tend to choose alternate transit modes,
leading to increased traffic congestion. They catego-
rized the bus stops along the static routes into critical
and non-critical stops and added slack time to account
for travel delays during the existing static scheduling
process. As a result, flexible routes resulted in less
additional travel time than available slack time. The
effectiveness of rerouting was analyzed using the per-
centage increase in travel demand (Nannapaneni and
Dubey, 2019).
3 PRELIMINARIES AND
DATASET
3.1 Dataset Description
The dataset is a critical component of every AI-based
system. This study utilizes New York City Bus data
(NYC, 2017). A total of 232 bus lines were inspected
to collect this data, and these records were captured
in 10-minute increments from 4468 buses.
This dataset was selected due to its rich proper-
ties. More than 6 million data generated in a month
are included in this dataset. Not only does this data
set have a vast number of records, but it also consists
of the most relevant parameters to the problem of ar-
rival time prediction. Each record contains the infor-
mation in the format of 17 fields, including Vehicle
location. Longitude, VehicleLocation.Latitude, Des-
tinationLong, DestinationLat, OriginLong, Origin-
Lat, RecordedAtTime, ArrivalTime, ScheduledAr-
rivalTime, DistanceFromStop, OriginName, Des-
tinationName, PublishedLineName, NextStopPoint-
Name, ArrivalProximityText, VehicleRef and Direc-
tionRef. The first 6 fields are the current bus location,
destination, and origin coordinates. Other field de-
scriptions are as follows:
• RecordedAtTime is the checkpoint time in which
the current location of the bus is recorded and
used as the bus observation time in this study.
• ArrivalTime is the time when the bus arrives at the
next stop.
• ScheduledArrivalTime is from the published bus
timetable, indicating the scheduled time for the
bus to arrive at the next stop.
• DistanceFromStop is the distance of the bus from
the next stop at the observation time.
• Origin and destination are defined by OriginName
and DestinationName.
• PublishedLineName represents in which line bus
operates.
• NextStopPointName is the name of the next bus
stop.
• ArrivalProximityText shows the current status of
the bus in terms of a text, including at stop, ap-
proaching, and how many miles the bus is away.
• VehicleRef is the reference number for every bus
whose location is being tracked.
• DirectionRef field indicates inbound or outbound
bus direction.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
126
3.2 Cleaning the Data and
Preprocessing
Data is first cleaned and preprocessed to get meaning-
ful concepts from this dataset. Then, the most related
features are created, which will be explained in the
methodology section. While around 6 million data
instances are available in this dataset, they can not
be considered logical observations. Since the goal is
to predict the arrival time of the bus to the next sta-
tion, we are only interested in the data points in which
the bus is moving between bus stations. So, data
is first filtered based on the ”ArrivalProximityText”
field, and data samples with at-stop value dropped
from the data points, where actual arrival time almost
equals the bus observation time. By doing the previ-
ous steps, around 2 million records were available to
work with.
3.3 Analysis of the Data
Different indicators can measure the quality of service
in public transit infrastructures. On-time performance
at stops is an essential factor. Difference time between
scheduled and actual bus arrivals has been selected
as the top reason people avoid bus transit systems in
many cities (Dubey et al., 2019).
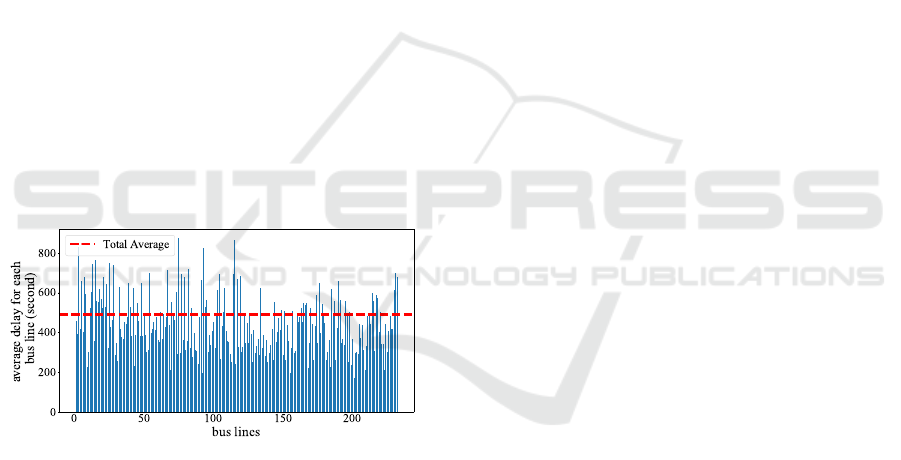
Figure 3: Average delay among all bus lines. Initial analysis
of records in the New York dataset shows that the average
delay across all bus lines equals 491 seconds.
So, data is first analyzed regarding mismatching
between the scheduled arrival time and the actual ar-
rival time. Mismatch time refers to any difference
between the bus’s scheduled time and arrival time.
When the bus arrives at the bus stop earlier, passen-
gers might miss the bus, and also, for late buses, pub-
lic transportation infrastructure suffers from the delay.
Any of these two arrival time variations impact com-
muters’ satisfaction significantly (Dubey et al., 2019).
Our study found that the average delay and mismatch
time across all lines of this dataset is around 8 minutes
(491 seconds) and 6 minutes, respectively. The aver-
age delay for these 232 bus lines has been illustrated
in Figure 3.
4 PROPOSED NEURAL
NETWORK METHODOLOGY
4.1 Feature Extraction
The New York data set has 232 lines, and each line has
been segmented into the number of bus stops. Assign-
ing each line an integer value would not be a practical
approach since an ordered relationship exists between
integer values and may lead to poor performance of
the model. One-hot encoding applies to categorical
variables like bus lines without an ordinal relation-
ship. This encoding helps the bus lines be injected
into the model in terms of binary variables. Applying
one-hot encoding on bus lines expands the input fea-
tures and adds 232 more inputs. On the other hand,
bus stops have some order, and they are fed into the
model through integer encoding. The bus stop input
variable can help the model track the traffic condi-
tions and passenger flow varying from one bus stop to
another.
As mentioned before, the bus records in this
dataset were collected for a month. Because of the
wide time variation, time is injected into the model in
terms of two categories rather than feeding it directly
into the model. This approach avoids injecting a lot
of noise into the model.
First, based on the day of the bus operation, the
variable ”day type” is added to the input features,
which can get two values, ”weekend” and ”workday”.
The other time-related variable is the rush hour status.
According to the operation time of the bus, this fea-
ture assigns to each record of the dataset, determin-
ing whether the bus operates during rush hour or not.
Rush hour in New York spans from 6 AM to 10 AM
and 3 PM to 7 PM (MTA, 2023).
In addition to the features that were previously
mentioned, there are two distance-related features in
the model. The distance input feature, the most im-
portant feature among other features, indicates how
many meters the bus is far from the next stop. Far
status is another distance-related feature added to in-
put features according to the distance value. It is
a binary feature that changes depending on whether
the distance is below or above a specified threshold.
Research on the distribution of bus stop spacings in
the United States reveals that the average distance be-
tween bus stops in New York is 328 meters (Pandey
et al., 2021). In our study, we determined a threshold
value of 250 meters through trial and error. when the
distance is below this threshold, it indicates that the
Real-Time Bus Arrival Prediction: A Deep Learning Approach for Enhanced Urban Mobility
127
bus is on its way to the next station and probably not
waiting at the previous bus stop.
Trip time (Tr) is the target variable we aim to pre-
dict with our model, representing the time required
for a bus to reach the next bus station from its current
location. It is calculated in seconds by subtracting
the bus observation time (T
ob
), which corresponds to
the RecordedAtTime in the dataset, from the actual
arrival time (T
ar
), associated with ArrivalTime in the
dataset. In practical scenarios, knowing the trip time
allows for the calculation of the arrival time of the
bus.
Tr = T
ar
− T
ob
(1)
Table 1 summarizes the input and output features that
were produced during the feature extraction step.
Table 1: Input and Output Features.
Input Features
One-hot Encoded Bus Lines
Distance
Day Type
Rush Hour Status
Bus Stops
Far Status
Output Feature Trip Time
4.2 Feature Scaling
Due to the different range of input features, data needs
to be scaled prior to being injected into the model.
Some input features, like rush hour status, are in the
binary form and represented by 1 and 0, while oth-
ers like distance, can be hundreds of meters. Without
feature scaling, the model can be affected by the dif-
ferent range of features, assigning higher weights to
the features with large scale. So, Min-Max scaling is
used to transform the value of all input features to the
range of 0 and 1.
4.3 Train and Validation Sets
The dataset is divided into a train and validation set.
80% of the dataset has been categorized as a training
set for the training of our model, while 20% of the
dataset has been used as a validation set. The total
number of instances is 2.13 million. 1.7 million is
used for training our model, while the rest is utilized
for validation. It is also worth mentioning that the
average of training data samples for each line is 7327.
4.4 Model Design
Artificial Neural Networks (ANNs) are very common
in forecasting bus trip time. Previous studies have
demonstrated that ANNs are effective in predicting
nonlinear relationships in complicated problems. (Bai
et al., 2015).
In this study, we make use of FCNNs to predict
the bus trip time. As discussed in the previous sec-
tion, due to the large number of bus lines, FCNNs
can handle high-dimensional feature spaces by using
hidden layers and non-linear activation functions. To
determine the optimal architecture for our model, we
conducted various experiments with different config-
urations, including the number of hidden layers, neu-
rons in each layer, and activation functions. Based on
the results obtained, we selected the best-performing
model with enhanced prediction capabilities.
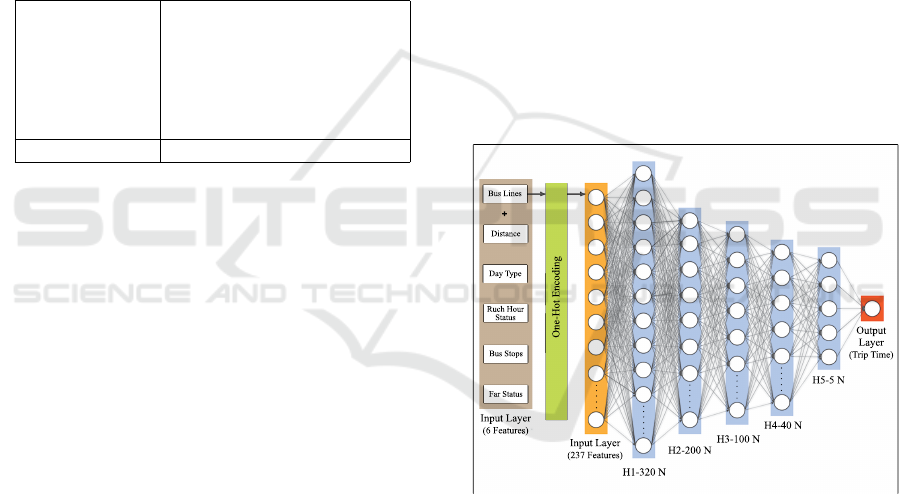
As illustrated in Figure 4, the model is fed with
237 input features, including 232 features generated
through one-hot encoding for bus lines, distance, day
type, rush hour status, bus stops, and far status. Ad-
ditionally, the output layer consists of one neuron
for predicting the bus trip time based on transformed
input data from the preceding hidden layers. Con-
sequently, throughout all our experiments, the input
layer and output layer remained identical.
+
H1-320 N
H2-200 N
H3-100 N
Output
Layer
(Trip Time)
H4-40 N
H5-5 N
Bus Lines
Distance
Day Type
Bus Stops
Far Status
Ruch Hour
Status
Input Layer
(237 Features)
One-Hot Encoding
Input Layer
(6 Features)
Figure 4: Structure of our model based on the Fully Con-
nected Neural Network. One-hot encoding applies to bus
lines and extends it to 232 features. These converted fea-
tures with other 5 features, including distance, day type,
rush hour status, bus stops, and far status feed to the Fully
Connected Neural Network. The proposed model consists
of 5 hidden layers and ReLU as an activation function. The
number of neurons in each hidden layer can also be seen
in the figure. H1-320N indicates that the first hidden layer
consists of 320 neurons.
Our experimental methodology involved a thor-
ough investigation into the architecture of the neu-
ral network. Specifically, we systematically varied
the number of hidden layers from 2 to 7, evaluat-
ing their impact on model performance. Within each
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
128

configuration, we adjusted the number of neurons in
a descending order across layers, with the first layer
having the maximum number of neurons and the last
layer having the minimum number of neurons. By
modifying these architectural parameters, our goal
was to create a balance between model complexity
and generalization. This aimed to ensure that the
FCNN captures intricate patterns in the data without
overfitting.
Our experiments demonstrated that surpassing 5
hidden layers fails to enhance accuracy. Conse-
quently, we utilized 5 hidden layers for our model.
Concerning the number of neurons for each layer, we
observed that an increased number of neurons, 512
neurons, did not yield an improvement in accuracy.
Instead, it led to a more complex model with more
parameters without any benefit in predictive perfor-
mance. Consequently, we settled on 320 neurons for
the first layer, ensuring an optimal balance between
capturing complexity and preventing unnecessary pa-
rameter inflation. The same rationale guided our de-
cisions in determining the most suitable number of
neurons for each layer.
Moreover, another important factor in FCNNs is
the choice of activation function that plays a key role
by introducing non-linearity to the model. Rectified
Linear Unit (ReLU) function is used as an activation
function in our model. Since the number of hidden
layers in our model is large, ReLU is a better choice
than Sigmoid and Hyperbolic Tangent (Tanh), helping
to mitigate the vanishing gradient problem.
According to Figure 4, our best model has seven
layers, including an input layer, 5 hidden layers, and
an output layer. In the first hidden layer, the model
learns more complex representations of input features
by increasing neurons to 320. The number of neurons
decreases step by step in the next hidden layers, from
200 in the second hidden layer to 5 neurons in the fifth
hidden layer. The structure of the presented model
can be seen in Table 2.
Table 2: Structure of fully connected neural network ap-
plied to New York dataset with 232 bus lines.
Parameters
Number of inputs 237
Number of hidden layers 5
Activation function ReLU
Number of neurons in the first layer 320
Number of neurons in the second layer 200
Number of neurons in the third layer 100
Number of neurons in the fourth layer 40
Number of neurons in the fifth layer 5
Number of outputs 1
5 RESULTS AND DISCUSSION
5.1 Performance Measurements
The performance evaluation of arrival time predicted
by the model can be done using different measures,
including Mean Absolute Percentage Error (MAPE),
Mean Square Error (MSE), and Root Mean Square
Error (RMSE).
In this study, we assess the model’s accuracy using
RMSE, which quantifies the difference between pre-
dicted trip times and actual trip times in seconds.
RMSE is a widely used metric in the field of bus
arrival time analysis, facilitating comparisons with
other models. Furthermore, RMSE shares the same
unit as the predicted values (seconds), simplifying the
interpretation of errors in terms of time.
RMSE can be represented as the following equa-
tion where t
act
is the actual bus trip time, (Tr in Equa-
tion 1), t
pred
stands for the predicted bus trip time
based on the proposed model, and n is the sample size
for prediction. Lower RMSE represents better perfor-
mance in prediction.
RMSE =
r
Σ
n
i=1
(t
act
−t
pred
)
2
n
(2)
5.2 Results and Model Performance
Discussion
5.2.1 Results for Fully Connected NN on all Bus
Lines
The training process was implemented on a system
with an Intel i7-1185G7 processor with 4 cores and
a speed of 3.00 GHz. Table 3 shows the results of
applying our model on 232 bus lines with the learning
rate of 1e − 2.
Table 3: Obtained results in terms of RMSE for the New
York dataset with 232 bus lines.
Results
Training RMSE 35.69 s
Validation RMSE 35.74 s
It can be observed that the average RMSE for all
bus lines is 35.74 seconds. In other words, the pre-
dicted arrival time of the bus to the next station has
an error lower than 36 seconds. This prediction er-
ror can be contrasted with the average delay observed
across all bus lines in the dataset, which equals to 491
seconds according to the data analysis section. Figure
5 demonstrates the RMSE over each bus line. While
the highest prediction error is 119.99 seconds in line
Real-Time Bus Arrival Prediction: A Deep Learning Approach for Enhanced Urban Mobility
129
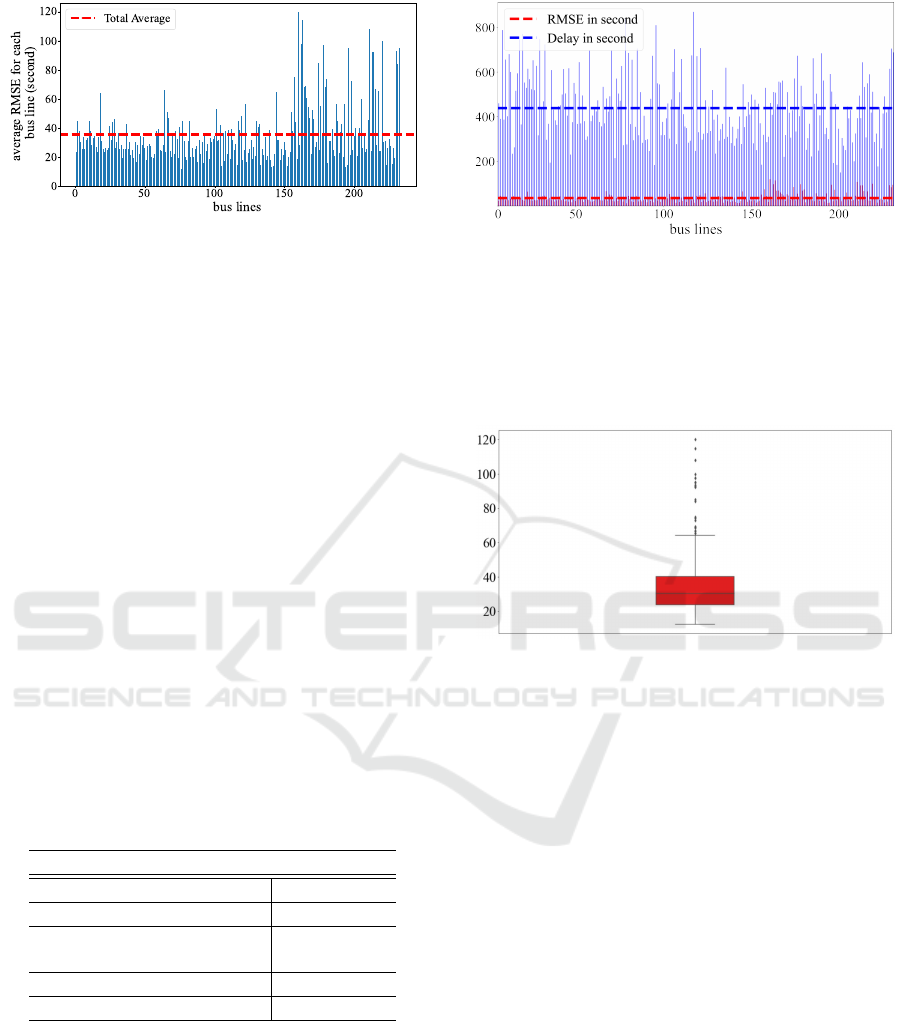
Figure 5: Performance of the model for all bus lines. The
average RMSE across all bus lines in the validation set is
35.74 seconds. Among the prediction error values, bus line
160 has the greatest RMSE, with a value of 119.99 seconds.
In contrast, the lowest error belongs to bus line 76 with an
RMSE equal to 12.42 seconds.
number 160, the lowest RMSE belongs to line num-
ber 76, with the RMSE equal to 12.42 seconds.
Additionally, Figure 6 illustrates the comparison
between the actual delay and RMSE of the predicted
arrival time across all bus lines in the validation set.
The large RMSE values in certain bus lines compared
to others could be due to the lack of relevant features
in predicting bus trip time. There is a wide range of
other factors affecting the bus trip time, but not avail-
able in this dataset. For instance, passenger demand is
a feature that this dataset does not include. By equip-
ping buses with passenger counting systems, passen-
ger demand for each bus stop can also be recorded.
This parameter impacts the bus dwell time, referring
to a bus’s time at a stop without moving. Addition-
ally, a potential area for future research could involve
investigating how weather types can influence error
arrival time prediction.
Table 4: Properties of the proposed model for bus arrival
time prediction on the New York dataset.
Model Properties
Total Training Time 7171s
Total Inference Time 2.42s
Inference Time per each
Validation Sample
0.00578 ms
Number of Parameters 164710
Computational Complexity 165380 Mac
In Figure 7, we have also shown RMSE distribu-
tion. Training time and inference time per each vali-
dation set data point are also presented in Table 4. The
average inference time for each validation data point
is 0.00578 ms. This implies if a passenger sends a re-
quest to the cloud to get the bus arrival time for their
trip, it takes less than 0.006 ms to produce AI-based
predictions. It should be noted this inference time in-
dicates the required time only for one access. When
Figure 6: Comparison between actual delay and RMSE
across validation set samples, containing 426,323 samples.
The average delay for all bus lines in the validation set is
438 seconds, while the prediction error over these samples
is less than 36 seconds.
thousands of passengers request bus arrival time to the
cloud, it will grow significantly.
Figure 7: RMSE distribution in the form of a boxplot. It
displays the difference in RMSE values by showing the me-
dian of 35.74 seconds.
5.2.2 Scalability Comparison Between our
Model and SVR
Since there are more than 200 lines in the dataset,
a generalized model is needed to predict the arrival
time with the lowest possible error for all bus lines.
This section illustrates the scalability comparison of
our model and SVR for this dataset. The reason for
making this comparison is that SVR is among the
other machine learning approaches that are popular
for bus arrival time prediction problems, and a lot of
researchers used SVR with the Radial Basis Function
(RBF) kernel for bus arrival time prediction (Noor
et al., 2020).
So, for a different number of bus lines, SVR with
RBF kernel was used. The experimental results, as
observed in Figure 8, indicate that in a small number
of lines, SVR and our model prediction patterns are
almost the same. RMSE for prediction on 10 lines
using FCNN and SVR is 22.84 and 26.67, respec-
tively. When the number of lines rises from 10 to 20,
RMSE is 24.90 and 33.98, showing a notable increase
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
130

Figure 8: Scalability comparison of FCNN and SVR. These
two models were evaluated for different numbers of bus
lines. In the range of 1 to 20 bus lines, the accuracy of SVR
prediction decreased significantly, while NN performance
remained almost unchanged. When the number of bus lines
exceeds 30, SVR can not be trained on this dataset.
in RMSE for the SVR model, and when the number of
bus lines surpasses 30, SVR becomes untrainable on
this dataset. Hence, in terms of scalability, our model
has a better prediction ability than SVR, which is why
FCNN was selected for the whole dataset.
6 CONCLUSIONS AND FUTURE
WORK
In this study, we engineered an AI-driven predic-
tion model aimed at propelling bus transit systems
into a realm of enhanced intelligence, thereby sig-
nificantly elevating passenger experience by curtail-
ing protracted wait times. Our innovative blueprint
unfolds a real-time bus arrival prediction mechanism,
presenting a stark contrast to the conventional rigidity
of fixed schedules.
The predictive model assimilates various input
features encompassing bus lines, distance, day type,
rush hour status, bus stops, and far status. The culmi-
nation of our endeavor, rooted in the Fully Connected
Neural Networks (FCNNs) framework, manifested in
an average estimated error reduction to less than 40
seconds across all bus lines within the dataset. This
outcome heralds a substantial leap forward when jux-
taposed against the average delay time embedded in
the dataset. Our forthcoming stride is geared towards
melding this AI-centric model within a smart mobile
application, thereby furnishing real-time insights to
commuters on the go.
The scope of this paper was partially tethered to
select features pertinent to bus trip time, dictated by
the constraints inherent in the utilized dataset. As
we move forward, numerous opportunities for future
research in this domain beckon exploration. Firstly,
investigating the integration of other factors, such
as passenger flow, and meteorological conditions,
could provide a more comprehensive understanding
of the factors influencing bus arrival times. Addi-
tionally, delving into alternative architectures, partic-
ularly self-attention based neural networks, could en-
hance the model’s adaptability to diverse transporta-
tion datasets. The innate capacity of such models to
capture long-term temporal dependencies within the
bus data suggests their potential for having more ac-
curate and efficient forecasting techniques in trans-
portation systems.
ACKNOWLEDGEMENT
This research is supported by the UNC Charlotte Col-
lege of Engineering seed grant and the UNC Charlotte
Urban Institute Urbain Institute for supporting this re-
search.
REFERENCES
(2017). New york city bus data.
(2017). Smart public transport – key to solving the urban
challenge - telia company. Accessed on Mar. 12, 2023.
(2019). Transport, data analytics and ai: Why tfl’s latest
initiative is good news. Accessed on Mar. 12, 2023.
(2022). September 2022 apta public transportation ridership
update. Accessed on Mar. 15, 2023.
(2023). Google maps vs waze – which one is better? Ac-
cessed on Mar. 15, 2023.
(2023). New york city transit key performance metrics. Ac-
cessed on Mar. 15, 2023.
Bai, C., Peng, Z.-R., Lu, Q.-C., and Sun, J. (2015). Dy-
namic bus travel time prediction models on road with
multiple bus routes. Computational intelligence and
neuroscience, 2015:63–63.
Chen, C., Chen, W., and Chen, Z. (2015). A multi-agent re-
inforcement learning approach for bus holding control
strategies. Advances in Transportation Studies.
Diab, E. I., Badami, M. G., and El-Geneidy, A. M. (2015).
Bus transit service reliability and improvement strate-
gies: Integrating the perspectives of passengers and
transit agencies in north america. Transport Reviews,
35(3):292–328.
Dubey, A. D., Basak, S. B., Sengupta, S. S., and Sun,
F. S. (2019). Data-driven optimization of public transit
schedule.
Erhardt, G. D., Hoque, J. M., Goyal, V., Berrebi, S., Brake-
wood, C., and Watkins, K. E. (2022). Why has
public transit ridership declined in the united states?
Transportation research part A: policy and practice,
161:68–87.
Freemark, Y. (2021). Us public transit has struggled to re-
tain riders over the past half century. reversing this
trend could advance equity and sustainability. urban
institute. The Urban Institute.
Real-Time Bus Arrival Prediction: A Deep Learning Approach for Enhanced Urban Mobility
131

Fu, J., Wang, L., Pan, M., Zuo, Z., and Yang, Q. (2014). Bus
arrival time prediction and release: system, database
and android application design. In International Con-
ference on Algorithms and Architectures for Parallel
Processing, pages 404–416. Springer.
Gaikwad, N. and Varma, S. (2019). Performance anal-
ysis of bus arrival time prediction using machine
learning based ensemble technique. In Proceedings
2019: Conference on Technologies for Future Cities
(CTFC).
Gholami, S., Lim, J. I., Leng, T., Ong, S. S. Y., Thompson,
A. C., and Alam, M. N. (2023). Federated learning for
diagnosis of age-related macular degeneration. Fron-
tiers in Medicine, 10.
Graehler, M., Mucci, R. A., and Erhardt, G. D. (2019).
Understanding the recent transit ridership decline in
major us cities: Service cuts or emerging modes. In
98th Annual Meeting of the Transportation Research
Board, Washington, DC.
Huang, H., Huang, L., Song, R., Jiao, F., and Ai, T.
(2022). Bus single-trip time prediction based on en-
semble learning. Computational intelligence and neu-
roscience, 2022.
Mallett, W. J. (2022). Public transportation ridership: Im-
plications of recent trends for federal policy. Technical
report.
Nannapaneni, S. and Dubey, A. (2019). Towards demand-
oriented flexible rerouting of public transit under un-
certainty. In Proceedings of the Fourth Workshop on
International Science of Smart City Operations and
Platforms Engineering, pages 35–40.
Noghre, G. A., Katariya, V., Pazho, A. D., Neff, C., and
Tabkhi, H. (2022). Pishgu: Universal path prediction
architecture through graph isomorphism and attentive
convolution. arXiv preprint arXiv:2210.08057.
Noor, R. M., Yik, N. S., Kolandaisamy, R., Ahmedy, I.,
Hossain, M. A., Yau, K.-L. A., Shah, W. M., and
Nandy, T. (2020). Predict arrival time by using ma-
chine learning algorithm to promote utilization of ur-
ban smart bus.
Pandey, A., Lehe, L., and Monzer, D. (2021). Distributions
of bus stop spacings in the united states. Findings.
Pazho, A. D., Neff, C., Noghre, G. A., Ardabili, B. R.,
Yao, S., Baharani, M., and Tabkhi, H. (2023). Ancilia:
Scalable intelligent video surveillance for the artificial
intelligence of things. IEEE Internet of Things Jour-
nal.
Pulugurtha, S. S., Mishra, R., and Jayanthi, S. L. (2022).
Does transit service reliability influence ridership?
Sen, R., Bharati, A. K., Khaleghian, S., Ghosal, M., Wilbur,
M., Tran, T., Pugliese, P., Sartipi, M., Neema, H., and
Dubey, A. (2022). E-transit-bench: simulation plat-
form for analyzing electric public transit bus fleet op-
erations. In Proceedings of the Thirteenth ACM In-
ternational Conference on Future Energy Systems (e-
Energy 2022).
Sun, F., Dubey, A., White, J., and Gokhale, A. (2019).
Transit-hub: A smart public transportation decision
support system with multi-timescale analytical ser-
vices. Cluster Computing, 22:2239–2254.
Sun, F., Pan, Y., White, J., and Dubey, A. (2016). Real-time
and predictive analytics for smart public transporta-
tion decision support system. In 2016 IEEE Inter-
national Conference on Smart Computing (SMART-
COMP), pages 1–8. IEEE.
Xu, H. and Ying, J. (2017). Bus arrival time prediction
with real-time and historic data. Cluster Computing,
20:3099–3106.
Yin, T., Zhong, G., Zhang, J., He, S., and Ran, B.
(2017). A prediction model of bus arrival time at stops
with multi-routes. Transportation research procedia,
25:4623–4636.
Zhong, G., Yin, T., Li, L., Zhang, J., Zhang, H., and Ran,
B. (2020). Bus travel time prediction based on ensem-
ble learning methods. IEEE Intelligent Transportation
Systems Magazine, 14(2):174–189.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
132
