
Dynamic Path Planning for Autonomous Vehicles Using Adaptive
Reinforcement Learning
Karim Wahdan
1
, Nourhan Ehab
1
, Yasmin Mansy
1
and Amr El Mougy
2
1
German University in Cairo, Cairo, Egypt
2
American University in Cairo, Cairo, Egypt
Keywords:
Dynamic Path Planning Autonomous Vehicles, Adaptive Reinforcement Learning.
Abstract:
This paper focuses on local dynamic path planning for autonomous vehicles, using an Adaptive Reinforcement
Learning Twin Delayed Deep Deterministic Policy Gradient (ARL TD3) model. This model effectively navi-
gates complex and unpredictable scenarios by adapting to changing environments. Testing, using simulations,
shows improved path planning over static models, enhancing decision-making, trajectory optimization, and
control. Challenges such as vehicle configuration, environmental factors, and top speed require further refine-
ment. The model’s adaptability could be enhanced by integrating more data and exploring a fusion between
supervised reinforcement learning and adaptive reinforcement learning techniques. This work advances au-
tonomous vehicle path planning by introducing an ARL TD3 model for real-time decision-making in complex
environments.
1 INTRODUCTION
Modern transportation systems are an essential cor-
nerstone of contemporary society, revolutionizing ur-
ban mobility and the efficient movement of goods.
Yet, the increased utilization of these systems has
been accompanied by a surge in accident rates, a sig-
nificant proportion of which can be attributed to hu-
man errors (Singh, 2017). In response to this chal-
lenge, the pursuit of fully autonomous transportation
has emerged as a promising solution. By reducing ac-
cidents and mitigating traffic congestion, autonomous
vehicles hold the potential to transform transportation
systems fundamentally.
However, the realization of autonomous trans-
portation systems is not without its critical challenges.
One of the most threatening obstacles faced by cur-
rent autonomous systems is their ability to execute
real-time dynamic path planning in the face of unpre-
dictable environments. In these dynamic and ever-
changing scenarios, autonomous systems often strug-
gle to determine the optimal route and trajectory for
vehicles to navigate complex urban settings, avoid-
ing potential collisions in real-time. Traditional rule-
based systems and even earlier reinforcement learn-
ing methods have shown limitations in adapting to the
rapidly shifting conditions of the road (Sharma et al.,
2021).
This is precisely where Adaptive Reinforcement
Learning (ARL) takes center stage. ARL is a special-
ized subfield of machine learning and reinforcement
learning, uniquely designed to create autonomous
systems that possess the capacity to adapt their behav-
ior and decision-making processes in response to real-
time changes in their environment (Li et al., 2021). In
the context of autonomous vehicles, ARL becomes a
critical enabler, as it allows these vehicles to contin-
ually refine their policies, optimizing their decision-
making in complex and uncertain traffic situations.
The need for ARL in the development of autonomous
vehicles stems from the dynamic and unpredictable
nature of real-world traffic environments. Unlike tra-
ditional rule-based systems or static reinforcement
learning, ARL algorithms can adapt to unexpected oc-
currences, rapidly shifting traffic patterns, and diverse
driving conditions. These models are robust to uncer-
tainties, less likely to fall victim to biases, and can
learn efficiently even with limited data, making them
well-suited for real-world applications.
The objective of this research is to harness the
potential of ARL models for dynamic path planning
in autonomous systems, specifically autonomous ve-
hicles. We aim to create a flexible model that can
adapt seamlessly to evolving environmental condi-
tions. This adaptability not only enhances the navi-
gational capabilities of autonomous vehicles but also
272
Wahdan, K., Ehab, N., Mansy, Y. and El Mougy, A.
Dynamic Path Planning for Autonomous Vehicles Using Adaptive Reinforcement Learning.
DOI: 10.5220/0012363300003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 272-279
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
minimizes data requirements and reduces the impact
of biases. In our evaluation, we place significant em-
phasis on metrics such as control smoothness and suc-
cess rate to provide a comprehensive assessment of
real-world performance. Our ultimate goal is to con-
tribute to the ongoing evolution of autonomous trans-
portation systems, thereby advancing their capacity
for real-time decision-making in ever-changing envi-
ronments and enhancing the safety and efficiency of
our transportation networks, all while highlighting the
pivotal role of ARL in this endeavor.
The rest of this paper is structured as follows. Sec-
tion 2 presents the design and implementation of our
ARL model for dynamic path planning. Section 3 un-
veils the specific evaluation metrics and testing sce-
narios employed, presenting their corresponding re-
sults. Section 4 presents the analysis of these results,
discusses their implications, and draws comparisons
with other related work in the field. Finally, Section 5
presents some concluding remarks.
2 PROPOSED FRAMEWORK
DESIGN
In the pursuit of developing advanced dynamic path
planning for autonomous vehicles, our paper intro-
duces a comprehensive framework that leverages the
power of Adaptive Reinforcement Learning (ARL).
This section provides a detailed overview of this
framework, which is divided into three main com-
ponents: the Meta-Drive simulation environment, the
TD3 model and its policy, and an adaptive module.
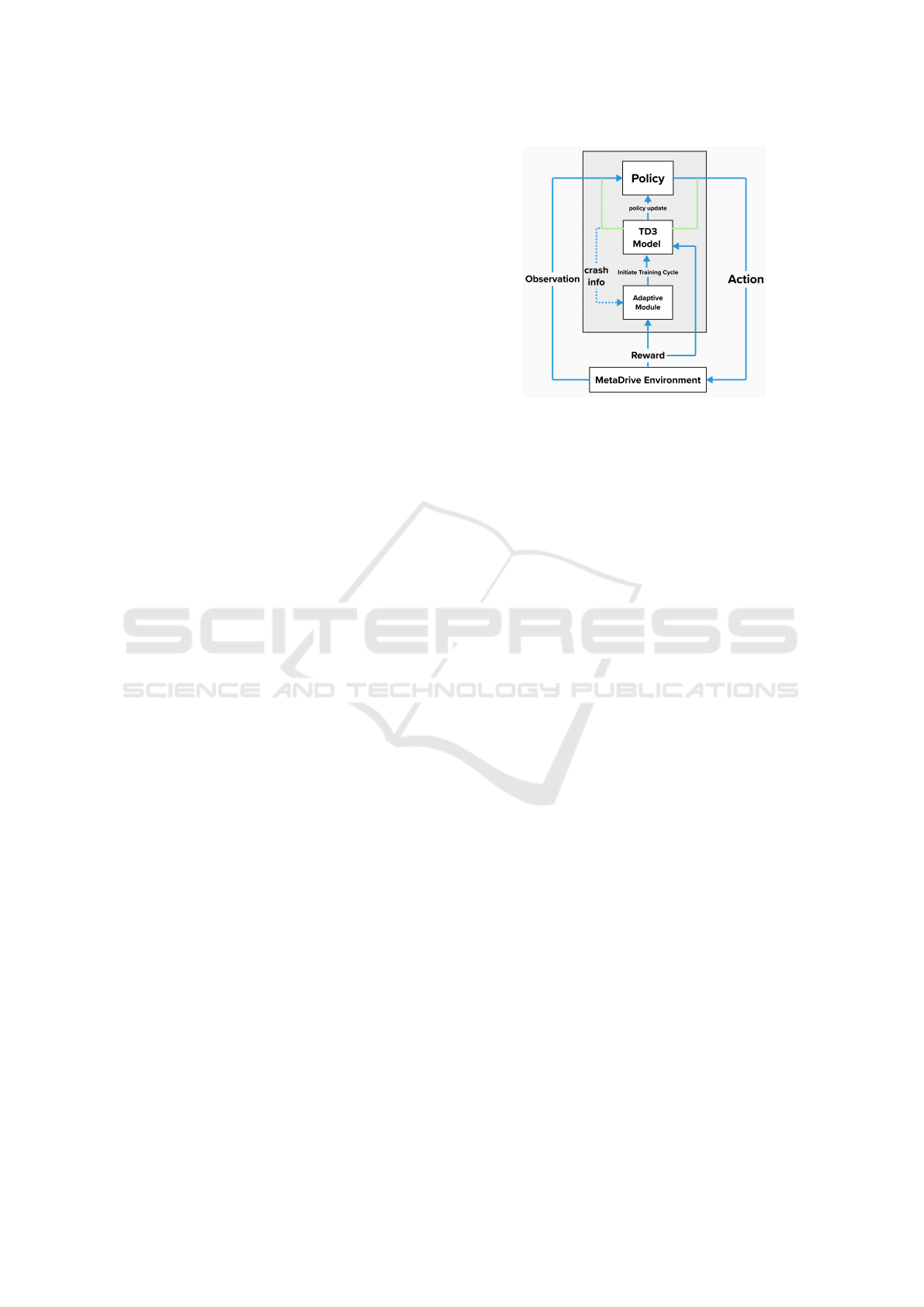
2.1 Framework Overview
The core of our approach lies in the interaction be-
tween three central components: the Meta-Drive sim-
ulation environment, the TD3 model and its policy,
and the adaptive module. Figure 1 is a visualization
of those interactions.
The Meta-Drive environment (Li et al., 2022)
stands as a robust simulation platform, purpose-built
for the training and evaluation of Reinforcement
Learning (RL) autonomous vehicles within intricate
urban traffic environments. With its high fidelity and
realistic features, including an accurate physics en-
gine, diverse vehicle dynamics, and realistic traffic
patterns, Meta-Drive provides an exceptional setting
for training autonomous vehicles.
At the heart of our framework, the Twin Delayed
Deep Deterministic Policy Gradients (TD3) model
plays a pivotal role in policy development and action
Figure 1: Framework Overview.
generation. Informed by observations from the Meta-
Drive environment, the TD3 model formulates actions
to be executed by autonomous vehicles. The policy
embedded within the TD3 model guides the process
of action selection.
Finally, the MetaDrive environment not only sup-
plies observation states and receives actions from the
TD3 model but also provides rewards for the ac-
tions taken, serving as a feedback signal for learning.
Additionally, it shares crash information for specific
episodes with the adaptive module, allowing it to initi-
ate new training cycles as necessary. In what follows,
we delve into the details of each module.
2.2 Meta-Drive Environment
The Meta-Drive (Li et al., 2022) is a driving simula-
tion platform that provides observations with a wide
range of sensory input including low-level sensors LI-
DAR and depth camera, and high-level scene infor-
mation such as the road environment, nearby vehicles,
and vehicle status. Our observation space can be di-
vided into three main sections: the vehicle state, nav-
igation information, and surrounding data. The vehi-
cle state variables are 19 values including values like
steering, heading, and velocity. The navigation infor-
mation variables are 10 values that represent the rela-
tionship between the vehicle and its final destination
and following checkpoints The surrounding informa-
tion is a vector that captures various aspects of the en-
vironment, including data from 2 side detectors, and
40 LIDAR points input.
In our context, the action space comprises two es-
sential components: steering and throttle. These com-
ponents are assigned numerical values that span from
-1 to 1. This numerical range facilitates precise and
adaptable maneuvering in various driving scenarios.
The reward function in Meta-Drive is designed to
Dynamic Path Planning for Autonomous Vehicles Using Adaptive Reinforcement Learning
273

incentivize desirable behaviors and discourage unde-
sirable ones. It is be defined as:
R(s,a,s
0
) = c
1
· Driving reward + c
2
· Speed reward
+ Termination reward
The driving reward is calculated as d(t +1)−d(t),
where d(t + 1) and d(t) denote the longitudinal co-
ordinates of the target vehicle. with c
1
= 1 The
speed reward is calculated asv
t
/v
max
, which encour-
ages the agent to maintain a high speed while min-
imizing unnecessary accelerations and decelerations.
with c
2
= 0.1
The termination reward is given to the au-
tonomous vehicle at the end of the episode, based on
the termination state. That can be a success reward
(a positive reward), an out-of-road penalty, a crashed-
vehicle penalty, or a crashed-object penalty — all of
which are negative.
There is one additional optional parameter that we
introduced to the reward function called the ”lateral
reward”. This is a multiplier that is added to the driv-
ing reward to incentivize the agent to stay in lane. The
lateral reward is used on some models in testing
2.3 TD3 Model Development
The TD3 model serves as the fundamental component
of our adaptive reinforcement learning (ARL) solu-
tion. It is a significant advancement over the tradi-
tional policy of the Gradient actor-critic and DDPG
model by enhancing the error approximation associ-
ated with the Actor-Critic models through the incor-
poration of twin critics. This effectively mitigates
the issue of the overestimation bias commonly ob-
served and a delayed policy update mechanism en-
abling a more precise estimation of values and target
policy smoothing. Consequently, this encourages ex-
ploration and prevents the policy from becoming too
deterministic by incorporating noise during the train-
ing phase.
2.3.1 Replay Buffer
The first component of our model is the replay buffer,
which serves as the main memory of the reinforce-
ment learning model and is utilized to store and sam-
ple past experiences, allowing the model to draw from
its accumulated experiences to generate training data
for efficient learning. Our replay buffer is imple-
mented with a fixed capacity, to prevent the model
from being influenced by ancient data in new training
cycles, allowing it to be more dynamic in new envi-
ronments. Each transition represents the change of
state based on the actions of the autonomous vehicle
and is stored in the replay buffer as five components:
the current state, the resulting next state, the action
taken, the associated reward, and an episode comple-
tion indicator.
The initialized replay buffer comprises a data
structure of a predetermined size, featuring an indica-
tor pointing to either the subsequent vacant position
or the position earmarked for replacement.
Transitions can be added to the replay buffer and
they are added to the next vacant position or the oldest
transition is replaced with the newest.
Any sample subset of the replay buffer can be gen-
erated for training the model on a subset of previous
experiences.
2.3.2 Neural Networks Infrastructure
The model consists of six dense deep neural networks
each with their functionality, the actor-network serves
as the policy network, responsible for generating ac-
tions based on the current state of the environment.
The critic-networks play a crucial role in esti-
mating the action-value function, which evaluates the
quality of the actions taken by the actor-network, the
critic-networks output a scalar value that represents
the estimated action-value or Q-value for the given
state-action pair.
To stabilize the training process and enhance the
overall performance of the TD3 model, the introduc-
tion of two sets of target networks is crucial. These
networks include the target actor-network and the
target-critic networks, which play integral roles in es-
timating action values and reducing overestimation
bias.
The target actor-network and target critic-
networks are replicas of their respective actor and
critic networks. They do not get updated during
training; instead, their parameters change gradually
through soft target network updates. This process in-
volves smoothly blending the target network’s param-
eters with those of the actual network, using a small
factor to achieve a gradual update. Soft target net-
work updates are crucial for stabilizing the learning
process.
2.3.3 TD3 Mechanisms
The TD3 model follows a comprehensive training ap-
proach, involving actions like sampling transitions,
computing target Q-values, minimizing overestima-
tion bias, and employing soft target network updates.
These mechanisms collectively enable precise value
estimation, enhanced exploration, and stabilization of
the learning process.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
274

The intricacies of the TD3 model and its training
process are encapsulated in a single entity, as demon-
strated in Algorithm 2. This entity efficiently orches-
trates the model’s interactions with its environment,
facilitating learning, and adaptation.
Data: state dim, action dim, max action
Result: TD3 Agent
Function TD3(state dim, action dim,
max action)
Initialize actor, actor target, critic, and
critic target networks;
Load actor, critic weights into actor target,
critic target;
Initialize actor and critic optimizer;
Set maximum action value;
Function select action(state)
return actor(state);
Function train(replay buffer,
iterations, batch size, discount,
tau, policy noise, noise clip,
policy freq)
for it ← 1 to iterations do
Sample transitions (s, s’, a, r, d);
From the next state s’, compute the
next action a’ using actor target;
Add Gaussian noise to the next action
and clamp it;
Compute target Q-values using the two
critic targets;
Keep the minimum of these two
Q-values: min(Qt1, Qt2);
Compute target Q-values with discount
factor;
Compute current Q-values using two
critic networks;
Compute critic loss;
Backpropagate the Critic loss and
update the parameters of the two
Critic models using SGD optimizer;
if it % policy freq == 0 then
Compute actor loss;
Update actor parameters using
gradient ascent optimizer;
Update actor target and critic target
weights using Polyak averaging
every two iterations;
end
end
Function save(filename, directory)
Save actor, critic weights to a file;
Function load(filename, directory)
Load actor, critic weights from a file;
Algorithm 1: TD3 Class.
2.3.4 Model Training
The training process unfolds over millions of
timesteps, driven by a robust training loop. The key
steps in the training loop encompass episode monitor-
ing, policy evaluation, reward calculation, and storage
of evaluation results. These iterative steps ensure that
the agent continuously refines its policy through in-
teractions, training, and evaluations within the envi-
ronment.
At each timestep, the procedure checks if the
episode has ended or if the maximum steps per
episode have been reached. If so, training begins.
Using experiences from the replay buffer, the pol-
icy is learned with the train() function, but only
if there are enough experiences and it’s not the first
timestep. After training, the current policy is eval-
uated with the evaluate_policy() function, based
on the eval_freq argument. The evaluation results
are stored, and the policy is saved.
The evaluate_policy() function takes a given
model and ”n” episodes to test it on each episode con-
sisting of ”m” steps and then returns the average re-
ward over testing and the average number of steps per
episode before termination. In our train the models
were tested on 10 episodes of 10e4 steps each. again
these values were obtained through multiple iterations
of tuning of trying to ensure a steady reward output of
the same model.
Episode-related variables are updated, timesteps
increase, and the environment state resets. The agent
decides whether to explore (before start timesteps)
or choose an action based on the learned policy. If
there’s exploration noise, it adds noise to the ac-
tion within action space boundaries. The chosen ac-
tion is executed in the environment, and the code re-
trieves the next observation, reward, and episode sta-
tus. Episode and overall rewards are updated, and the
transition is stored in the replay buffer.
Once the main loop ends, the final policy evalu-
ation is added to the evaluations list, and if the save
models flag is set, the policy is stored. The final
evaluation result is saved as well. The environment
is closed and restarted. The average reward across
episodes is computed by dividing the total reward by
the number of episodes (episode num). This loop it-
eratively improves the agent’s policy through interac-
tions, training, and periodic evaluations with the en-
vironment.
2.4 Adaptive Module
The final piece of our framework is the adaptive mod-
ule, a hybrid approach that combines batch learn-
Dynamic Path Planning for Autonomous Vehicles Using Adaptive Reinforcement Learning
275
ing and online learning to maximize adaptability. It
begins with an offline training phase in which the
model calculates an average reward across all training
episodes. This average reward serves as a threshold
for subsequent episodes.
During new episodes, if the model’s performance
falls below 20% of the average reward, it triggers
an online learning session, indicating a significant
environmental change. If, during three consecutive
episodes, the model scores below 70% of the average
reward, it initiates another online training session, ad-
dressing more subtle changes in the environment.
To ensure continual adaptability, the model en-
gages in batch learning cycles every 10
4
timesteps,
enabling it to remain up-to-date with evolving trends
and environmental shifts. This hybrid incremen-
tal/batch adaptive learning approach enhances the
model’s capacity to adapt to both significant and
subtle changes in the environment, making it well-
equipped to handle dynamic, complex traffic scenar-
ios.
The parameters of 20%, 70%, and 10
4
steps were
derived through multiple sessions of hyperparameter
tuning by trying multiple permutations of values for
each parameter.
3 RESULTS
To test the effectiveness of our proposed model, rigor-
ous tests on 5 different challenging real-world urban
scenarios were performed. Each is designed to test an
aspect of the model’s performance. Four distinct TD3
models, each with variations in training type, train-
ing duration, and the presence of lateral reward were
tested.
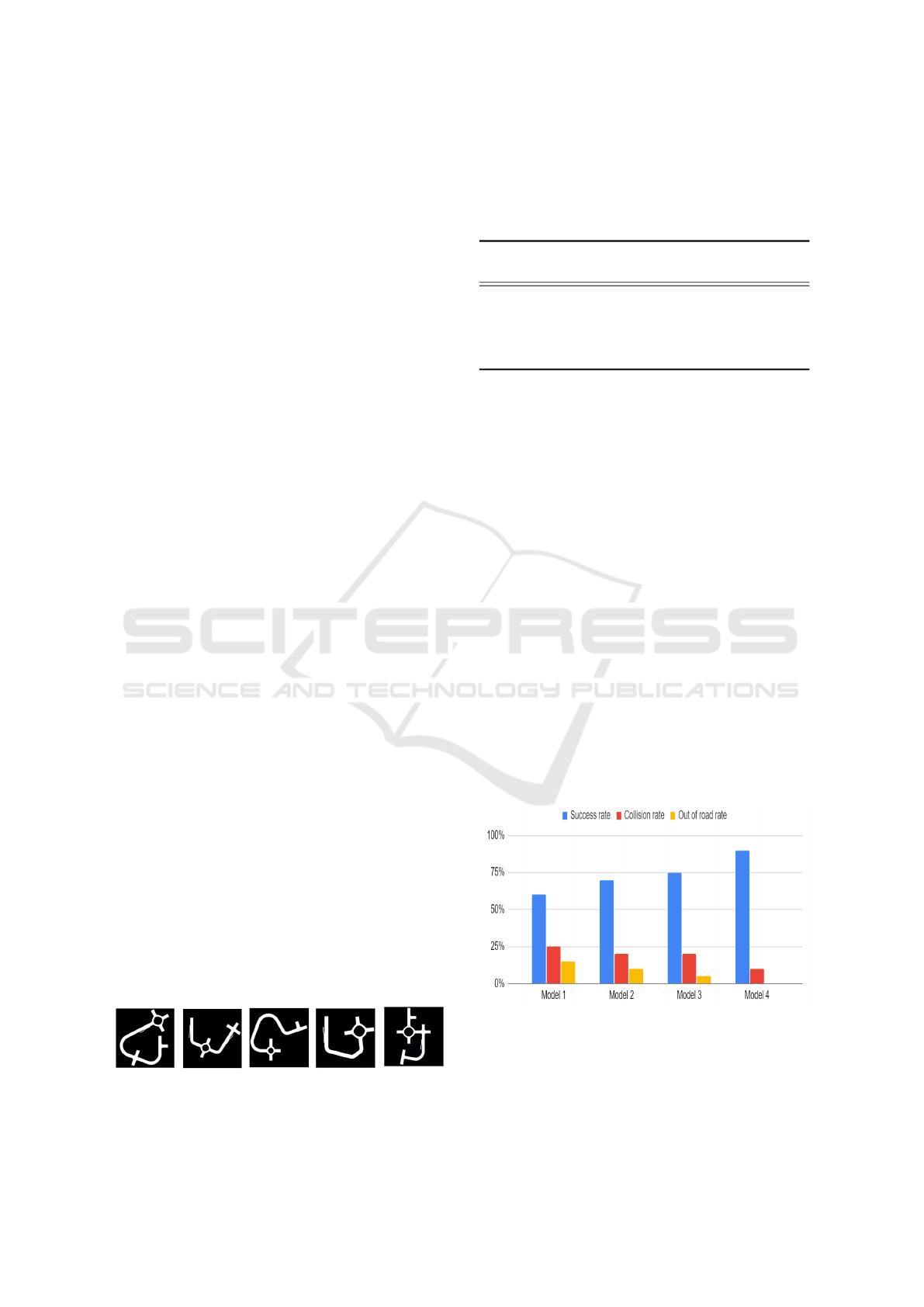
3.1 Scenarios and Model Variations
Figure 2 Represents a top overview of each of the 5
distinct maps that models were tested on, tests include
high traffic density, complex road layouts, and diverse
lane configurations. This diversity ensures a compre-
hensive assessment of the models’ adaptability to var-
ious urban settings. a detailed description of each sce-
nario will be provided in the corresponding scenario
result’s sub-section
Figure 2: Scenarios Maps Overview.
Table 1 shows a comparison between the attributes
and distinguishing features of the four models sub-
jected to testing which can be elaborated upon as fol-
lows:
Table 1: Model Performance Summary.
Model Training
Type
Duration Lateral
Reward
Model 1 Static 10
6
No
Model 2 Static 2 ∗ 10
6
No
Model 3 Adaptive 10
6
Yes
Model 4 Adaptive 2 ∗ 10
6
Yes
3.2 Scenario 1
In the first scenario, the models face a map with six
blocks. The environment is configured with a traffic
density of 0.1, representing a moderate level of traffic.
The lanes on the roads are randomly assigned, and the
vehicle spawn lane is randomized.
As Illustrated by figure 3 the performance of the
four models on this map. Model 1 achieved a 60%
success rate, indicating a moderate level of compe-
tence in completing driving tasks. However, it had a
higher collision rate of 25% and a 15% out-of-road
rate. Model 2 showed improvement with a 70% suc-
cess rate, a lower collision rate of 20%, and a reduced
out-of-road rate of 10%. Model 3 displayed further
improvement, achieving a 75% success rate, match-
ing Model 2’s collision rate while significantly reduc-
ing out-of-road incidents to 5%. The top-performing
model in this scenario was Model 4, with an impres-
sive 90% success rate, excellent collision avoidance
(10% collision rate), and perfect adherence to the des-
ignated road path (0% out-of-road rat
Figure 3: Scenario 1 Results.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
276
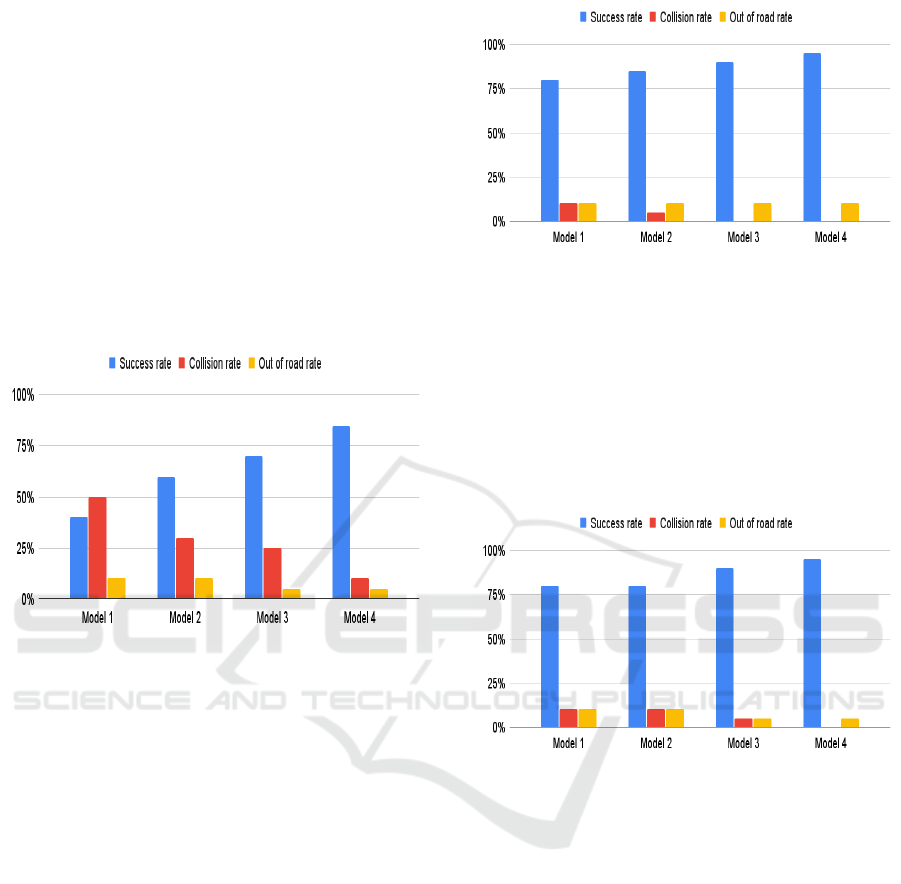
3.3 Scenario 2
In the second scenario, the models are tested on a map
with six blocks, featuring a higher traffic density of
0.4, representing heavy traffic. The lanes on the roads
are randomly assigned, and the vehicle spawn lane is
randomized.
As Illustrated by figure 4 All Models had slightly
worse performance than scenario 1 due to it being a
challenging scenario with a more complex configura-
tion of blocks and higher traffic density Model 4 had
the best performance by quite a large margin while
model 1 had the worst performance. while model 3
slightly outperformed model 2.
Figure 4: Scenario 2 Results.
3.4 Scenario 3
In the third scenario, the models face a map with six
blocks and a traffic density of 0.1, similar to Scenario
1. However, the number of lanes on the roads is as-
signed to three lanes, and the vehicle spawn lane is
also randomized.
As Illustrated by figure 5 All Models had signifi-
cantly better performance than scenario 1,2 due to it
being a simple scenario with a less complex configu-
ration of blocks, lower traffic density, and a known
number of lanes The highest-performing model re-
mained Model 4 with its success rate at 90% while
model 1 had the worst performance. while model 3
slightly outperformed model 2.
3.5 Scenario 4
Scenario 4 presents a map with six blocks and a traf-
fic density of 0.1, mirroring Scenario 3. However, in
this scenario, the lanes on the roads are assigned to
three lanes, and the vehicle spawn lane is placed in
the middle lane.
As Illustrated by figure 6 All Models had the best
Figure 5: Scenario 3 Results.
performance due to it being a simple scenario with
a less complex configuration of blocks lower traffic
density and a known number of lanes and spawning
point Model 4 had the best performance by quite a
large margin with a success rate of 95% while model
1 had the worst performance with a success rate of
about 80%. while model 3 slightly outperformed
model 2.
Figure 6: Scenario 4 Results.
3.6 Scenario 5
In this scenario, the four models are tested on the fifth
map, which consists of 7 blocks. The environment is
configured with a traffic density of 0.7, meaning that
there is a moderate amount of traffic on the roads. The
lanes in the environment roads are randomly assigned
and the vehicle spawn lane is also randomized.
As Illustrated by figure 7 All Models had the worst
performance due to it being a simple scenario with a
more complex configuration of ”7” blocks, and higher
traffic density. Model 4 had the best performance by
quite a large margin with a success rate of 85% while
model 1 had the worst performance with a success
rate of about 50%. while model 3 slightly outper-
formed model 2.
Dynamic Path Planning for Autonomous Vehicles Using Adaptive Reinforcement Learning
277
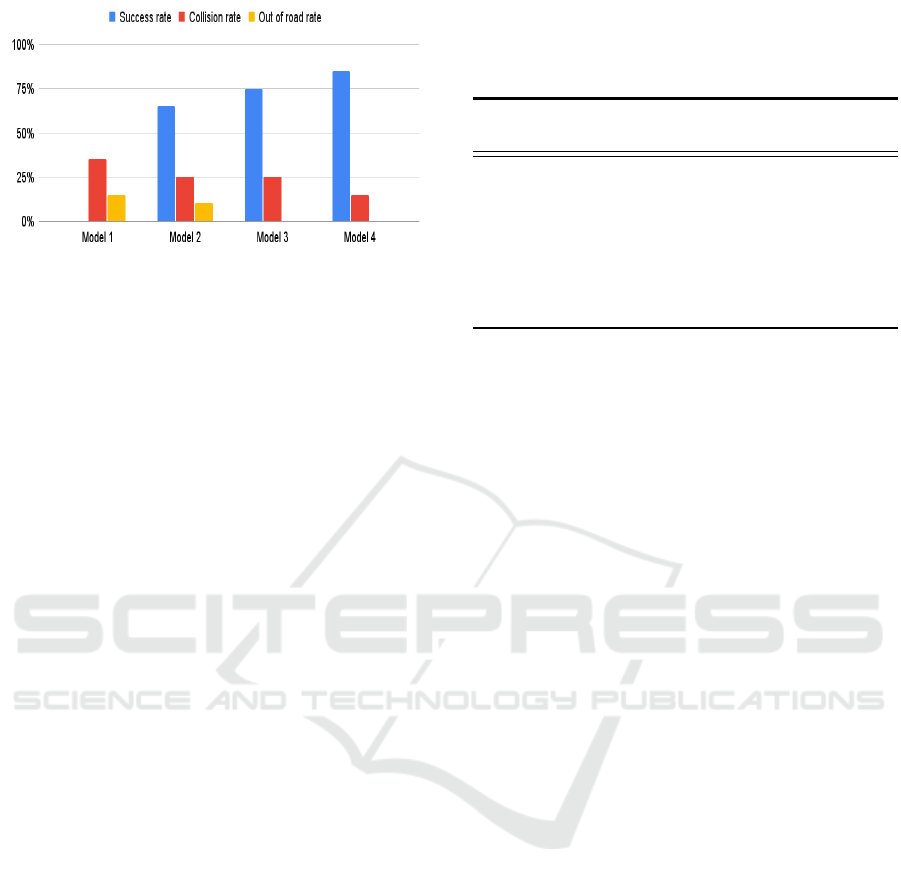
Figure 7: Scenario 5 Results.
4 DISCUSSION
The evaluation of the four models in realistic urban
environments provided valuable insights into their
performance, accuracy, and adaptability. The compar-
ison of metrics across different scenarios sheds light
on the strengths and weaknesses of each model con-
figuration.
4.1 Model Performance and Accuracy
The adaptive TD3 models (Models 3 and 4) consis-
tently outperformed the static TD3 models (Models 1
and 2) in all scenarios. They showed higher success
rates, lower collision rates, and better adherence to
traffic rules, indicating their effectiveness in handling
dynamic urban scenarios.
Model 4 outperformed all other models across var-
ious scenarios, achieving the highest success rate in
urban driving. Its success can be attributed to adap-
tive training, longer training duration, and the inclu-
sion of a lateral reward component. This model ex-
celled in collision avoidance and adherence to traffic
rules, making it the preferred choice for real-world
urban driving.
Model 3 also performed well, with success rates
comparable to Model 4. This highlights the signifi-
cance of adaptive elements in reinforcement learning
models for urban driving.
In contrast, Models 1 and 2, which employed
static training, exhibited lower success rates and
higher collision rates due to their inability to adapt to
changing conditions. While Model 2 performed bet-
ter than Model 1, both lagged behind adaptive mod-
els, underscoring the limitations of static training for
handling complex urban driving scenarios.
Furthermore, Models 3 and 4 demonstrated im-
proved steering control smoothness, thanks to their
adaptability and continuous learning during testing.
This improvement in steering control contributed to
their higher success rates and better adherence to traf-
fic rules.
Table 2: Model Performance Summary.
Model Success
Rate
Collision
Rate
Steering
Control
Model 1 Low High Not
Smooth
Model 2 Moderate Moderate Not
Smooth
Model 3 Above
Model 2
Moderate Improved
Model 4 Highest Low Improved
4.2 Training Time and Average Reward
The training time and average reward achieved dur-
ing the training phase were analyzed, revealing some
noteworthy findings. Models 2 and 4, benefiting
from longer training durations of 2 ∗ 10
6
steps, out-
performed Models 1 and 3 in terms of average re-
ward. This highlights the positive correlation between
extended training time and improved training perfor-
mance, resulting in higher rewards.
However, it’s crucial to consider that longer train-
ing durations come with increased computational re-
source requirements and time investments. Therefore,
there exists a trade-off between training time and per-
formance, as shown in Model 3 performance, despite
having a shorter training duration of 10
6
steps, still
delivered impressive performance and accuracy. This
indicates that adaptive training techniques can effec-
tively optimize training efficiency, allowing compet-
itive results to be achieved within a reasonable time
frame.
4.3 Related Work
In the realm of local path planning for autonomous
vehicles in dynamic environments, research has iden-
tified limitations in classical algorithms for real-
time adaptability, as discussed by (Gonzalez Bautista
et al., 2015). In contrast, our Adaptive Reinforce-
ment Learning (ARL) model excels in swift decision-
making in rapidly changing situations.
Another study by (Panda et al., 2020) found ex-
isting algorithms lacking in reliability for Automated
Underwater Vehicles (AUVs) in unmapped environ-
ments. Our model addresses this challenge with an
adaptive module for effective adaptation in unmapped
territories over time.
In a different study, (Hebaish et al., 2022) in-
troduced a fusion method combining Twin Delayed
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
278

Deep Deterministic (TD3) and Supervised Learning
(SL) to reduce training time and improve success rates
in specific scenarios.
Our model surpasses this approach and results in
even more complex scenarios with multiple lanes and
variable spawning positions, thanks to fine-tuning and
its adaptive module.
Additionally, (Zhou et al., 2022) extended the
work of (Gonzalez Bautista et al., 2015) by exploring
various machine learning techniques and highlighting
the time-consuming nature of training RL policies.
Our model builds upon the TD3 model by continu-
ously updating its policy and adapting to new data
without extensive training or concept drift concerns.
5 CONCLUSION
The Adaptive TD3 model introduced shows a promis-
ing solution to the complex problem of local dy-
namic path planning in autonomous driving. It builds
upon the foundation of the classical TD3 model and
aims to address the real-world challenges faced by
autonomous vehicles. The results of our evaluation
demonstrate the model’s superior performance in var-
ious scenarios, emphasizing its adaptability and effec-
tiveness.
However, it is important to acknowledge several
key limitations. The model’s maximum velocity con-
straint of 40 km/h, while necessary for stability within
the limited training time, is a significant drawback.
Future research should focus on developing methods
to raise the speed limit without compromising perfor-
mance, allowing the model to operate effectively at
higher speeds.
Another limitation is the lengthy training period,
especially at low speeds. This highlights the need for
more efficient training techniques that can expedite
the learning process. One potential solution is the in-
tegration of Adaptive Reinforcement Learning (ARL)
with Supervised Reinforcement Learning (SRL) to
create an ASRL TD3 model, offering faster and more
effective training.
Environmental factors, such as weather condi-
tions, lighting variations, and interactions with pedes-
trians, were not considered in the evaluation. These
factors play a crucial role in real-world driving scenar-
ios, and future research should focus on incorporating
them into the model’s input and training process. Ad-
dressing these aspects is vital for enhancing the real-
world applicability of the Adaptive TD3 model.
REFERENCES
Gonzalez Bautista, D., P
´
erez, J., Milanes, V., and
Nashashibi, F. (2015). A review of motion planning
techniques for automated vehicles. IEEE Transactions
on Intelligent Transportation Systems, 17:1–11.
Hebaish, M. A., Hussein, A., and El-Mougy, A. (2022).
Supervised-reinforcement learning (srl) approach for
efficient modular path planning. In 2022 IEEE 25th
International Conference on Intelligent Transporta-
tion Systems (ITSC), pages 3537–3542.
Li, Q., Peng, Z., Feng, L., Zhang, Q., Xue, Z., and Zhou, B.
(2022). Metadrive: Composing diverse driving sce-
narios for generalizable reinforcement learning. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence.
Li, X., Xu, H., Zhang, J., and Chang, H.-h. (2021). Opti-
mal hierarchical learning path design with reinforce-
ment learning. Applied psychological measurement,
45(1):54–70.
Panda, M., Das, B., Subudhi, B., and Pati, B. B. (2020). A
comprehensive review of path planning algorithms for
autonomous underwater vehicles. International Jour-
nal of Automation and Computing.
Sharma, O., Sahoo, N. C., and Puhan, N. B. (2021). Recent
advances in motion and behavior planning techniques
for software architecture of autonomous vehicles: A
state-of-the-art survey. Engineering applications of
artificial intelligence, 101:104211.
Singh, S. K. (2017). Road traffic accidents in india: is-
sues and challenges. Transportation research proce-
dia, 25:4708–4719.
Zhou, C., Huang, B., and Fr
¨
anti, P. (2022). A review of mo-
tion planning algorithms for intelligent robots. Jour-
nal of Intelligent Manufacturing, 33(2):387–424.
Dynamic Path Planning for Autonomous Vehicles Using Adaptive Reinforcement Learning
279
