
Investigating the Suitability of Concept Drift Detection for Detecting
Leakages in Water Distribution Networks
Valerie Vaquet*
a
, Fabian Hinder*
b
and Barbara Hammer
c
Machine Learning Group, Bielefeld University, Germany
Keywords:
Concept Drift Detection, Water Distribution Networks, Anomaly Detection, Leakage Detection.
Abstract:
Leakages are a major risk in water distribution networks as they cause water loss and increase contamination
risks. Leakage detection is a difficult task due to the complex dynamics of water distribution networks. In par-
ticular, small leakages are hard to detect. From a machine-learning perspective, leakages can be modeled as
concept drift. Thus, a wide variety of drift detection schemes seems to be a suitable choice for detecting leak-
ages. In this work, we explore the potential of model-loss-based and distribution-based drift detection methods
to tackle leakage detection. We additionally discuss the issue of temporal dependencies in the data and propose
a way to cope with it when applying distribution-based detection. We evaluate different methods systemati-
cally for leakages of different sizes and detection times. Additionally, we propose a first drift-detection-based
technique for localizing leakages.
1 INTRODUCTION
Clean and safe drinking water is a scarce resource in
many areas. Almost 80% of the world’s population is
classified as having high levels of threat in water secu-
rity (V
¨
or
¨
osmarty et al., 2010). This will aggravate in
the future as due to climate change the already limited
water resources will become more restricted (Rodell
et al., 2018). Currently, across Europe, considerable
amounts of drinking water are lost due to leakages in
the system
1
.
To ensure a reliable drinking water supply, there
is a need for robust, safe, and efficient water distribu-
tion networks (WDNs). In addition to avoiding water
losses, a crucial requirement is to ensure the quality
of the drinking water. As leakages enable unwanted
substances to enter the water system, monitoring the
system for leakages is an efficient tool to avoid wa-
ter loss and contamination (Eliades and Polycarpou,
2010; Lambert, 1994).
Due to complex network dynamics and changing
demand patterns detecting leakages is a challenging
task. This is aggravated by the fact that the avail-
a
https://orcid.org/0000-0001-7659-857X
b
https://orcid.org/0000-0002-1199-4085
c
https://orcid.org/0000-0002-0935-5591
1
https://www.eureau.org/resources/publications/1460-e
ureau-data-report-2017-1/file
∗ authors contributed equally
able data is very limited. Usually, the precise net-
work topology remains unknown or the documenta-
tion contains errors. As smart meter technologies are
not widely distributed there is no real-time demand in-
formation (Cardell-Oliver and Carter-Turner, 2021).
In realistic settings, this leaves a set of scarce pres-
sure and possibly flow measurements.
Commonly, existing leakage detection method-
ologies rely on replicating the system of interest by
hydraulic models and monitoring the discrepancies
between observations and modeled values. While
these approaches can provide reasonable detection
when considering larger leakages, the approaches
struggle when facing smaller leakages (Vrachimis
et al., 2022). Besides, limited (real-time) information
on the system is hindering the usage of these appli-
cations in real-world applications and the methodolo-
gies lack generalizability. Next to the hydraulic ap-
proaches, there are also a few machine learning (ML)-
based approaches that implement a similar strategy.
In this work, we focus on the problem of leak-
age detection from the perspective of handling data
streams containing temporal dependencies. More pre-
cisely, we formalize leakages as concept drift and the
problem of leakage detection as drift detection. We
aim to investigate the suitability of drift detection for
reliable leakage detection, whereby we focus on leak-
age of all practically relevant sizes. Our approach is
independent of the specific WDN and requires only
296
Vaquet, V., Hinder, F. and Hammer, B.
Investigating the Suitability of Concept Drift Detection for Detecting Leakages in Water Distribution Networks.
DOI: 10.5220/0012361200003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 296-303
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

real-time pressure measurements. Thus, it is more
flexible and efficient than hydraulic simulation-based
approaches.
This paper is structured as follows. First, we in-
troduce WDNs and summarize the main specifics of
this domain (section 2). Afterward, we briefly sum-
marize the body of related work on leakage detection
(section 3). In section 4, we define concept drift and
cover model-loss-based and distribution-based drift
detection. Before evaluating the suitability of these
methodologies for leakage detection in section 6, we
discuss the issue of temporal dependencies in the data
collected from WDNs and propose ways to account
for those (section 5). Finally, we conclude our paper
in section 7.
2 WATER DISTRIBUTION
NETWORKS
WDNs can be modeled as graphs consisting of nodes
representing junctions and undirected edges repre-
senting pipes as the flow direction of the water is not
pre-defined and can change over time due to changing
demands in the network. As the systems are observed
over time, hydraulic quantities like pressure and flow
describe the network graph at each time step. They
can be described by hydraulic formulas given that the
network is known in great detail. Next to the exact
pipe layout, different parameters like elevations, pipe
diameters, and pipe roughness are required. Assum-
ing sensors are installed in n nodes across the graph,
for each time step t, measurements x
t
= [x
t
1
.. .x
t
n
] are
collected where x
t
i
is the value at node i.
Real-world measurements of the complete hy-
draulic state of WDNs are not available as it is not
possible to measure the entire system. Even a precise
topology alongside measurements in many positions
is usually not available. When developing and eval-
uating methodologies monitoring WDNs one usually
relies on simulated data. Given the key parameters of
a system (layout, elevations, pipe information) along-
side demand patterns realistic network states contain-
ing anomalies like leakages can be simulated using
simulation tools like EPANET (Rossman, 2000).
As WDNs are part of the critical infrastructure
and are required to work robustly and safely to en-
sure the health and well-being of the population, addi-
tional requirements are put on monitoring tools, espe-
cially those using AI technologies. Besides require-
ments concerning robustness, safety, and fairness as
formulated in the European AI-Act ( European Com-
mission, 2021), some technical attributes of WDNs
pose additional challenges to ML approaches. When
working with WDNs, only limited knowledge about
the pipe system is available. Usually, the exact prop-
erties of the pipes, e.g. their diameters and rough-
ness, and the different elevation levels are unknown.
Note that these are available for a few benchmark net-
works, and thus benchmark scenarios can be gener-
ated. However, when designing monitoring systems
relying on this kind of information strongly limits the
applicability in practical applications.
Besides limited information about the system
setup, the system is also relatively opaque concern-
ing the real-time dynamics. Due to installation costs
and challenges regarding the power supply, the avail-
ability of pressure and flow sensors in WDNs is very
limited yielding readings at a fraction of the nodes in
the system. Data availability is even more limited for
real-time demand measurements, as households are
very rarely equipped with smart meters for drinking
water due to costs and data privacy (Cardell-Oliver
and Carter-Turner, 2021).
Another property of WDNs is the presence of
cyclic patterns in demands, flows, and pressures.
When working on ML approaches, one needs to ac-
count for the presence of temporal dependencies.
Daily, weekly, and seasonal patterns as well as long-
term developments, e.g. climate change or the
COVID pandemic, increase the difficulty of leakage
detection as especially smaller leakages might be lost
in the signals.
3 RELATED WORK
The body of related work on leakage detection can
be divided into methods relying on a hydraulic model
and very few ML-based approaches. Hydraulic
model-based methods generally aim to replicate the
real-world system with a hydraulic model (Hu et al.,
2018). Usually, the simulation results of the hydraulic
model are then compared to the observations. An
anomaly is reported if the residual of these meth-
ods is too large, which is determined either by a
threshold (Romero-Ben et al., 2022), a CUSUM ap-
proach (Steffelbauer et al., 2022), or visual inspec-
tion (Marzola et al., 2022). All these methods share
the downside that they require real-time demands and
more information on the network topology than is
usually available (Vrachimis et al., 2022). Besides,
they lack generalizability across WDNs as the hy-
draulic model is specifically designed for one net-
work and even needs adaptation if something changes
within this particular network. While these hydraulic-
based approaches yield good results considering large
leakages they usually miss smaller ones (Vrachimis
et al., 2022).
Investigating the Suitability of Concept Drift Detection for Detecting Leakages in Water Distribution Networks
297

There are few ML-based approaches for leakage
detection (Daniel et al., 2022; Laucelli et al., 2016;
Romano et al., 2014). However, many are only eval-
uated on very small networks and lack realistic de-
mands as input for the simulation data. Most of these
approaches replace the hydraulic model with some
ML model following the general idea of residual-
based anomaly detection, for example by using a
threshold (Daniel et al., 2022; Laucelli et al., 2016).
4 DETECTING CONCEPT DRIFT
Deploying ML-based systems in real-world scenar-
ios, one needs to account for all kinds of changes and
ensure that the models reliably work even if the ob-
served environment changes. Thus, considerable re-
search focuses on ML in the presence of changes in
the data-generating process, which are called concept
drift or drift for shorthand. To obtain a formal defi-
nition of drift, we first need to define a so-called drift
process (Hinder et al., 2020; Hinder et al., 2023c):
Definition 1. Let T = [0,1] and X = R
d
. A drift
process (P
T
,D
t
) from the time domain T to the data
space X is a probability measure P
T
on T together
with a Markov kernel D
t
from T to X , i.e. for all
t ∈ T D
t
is a probability measure on X and for all
measurable A ⊂ X the map t 7→ D
t
(A) is measurable.
We will just write D
t
instead of (P
T
,D
t
) if this does
not lead to confusion.
Based on this a definition of drift can be obtained:
Definition 2. Let (P
T
,D
t
) be a drift process. We say
that D
t
has drift iff
P
T,S∼P
T
[D
T
̸= D
S
] = P
2
T
({(t, s) ∈ T
2
| D
t
̸= D
s
}) > 0.
In many monitoring settings, the goal is to detect
the drift by using model-loss-based or distribution-
based approaches. While the latter directly investi-
gates the observed data, model-loss-based approaches
first train a model and then analyze its loss as a proxy
for change in the data distribution. The rationale is
that a drift event changes the data so that the model
cannot approximate well anymore, causing a decline
in the model loss. As argued by (Hinder et al., 2023a;
Hinder et al., 2023b) the relation between model-loss
and drift is rather loose – in case the model does not
provide sufficient complexity to approximate the data
distribution well (i) the drift might stay undetected as
it is smoothed out by the model or in converse (ii) the
model might change because of irrelevant changes,
e.g. a change in the ratio of classes. Thus, from a the-
oretical point of view, one should rely on distribution-
based drift detection. However, model-loss-based ap-
proaches like the residual-based strategy described in
section 3, are also widely used in monitoring tasks.
Therefore, we will investigate the suitability of both
types of drift detection methods in this work.
4.1 Model-Loss-Based Drift Detection
Applying model-loss-based drift detection, there are
two reasonable inference tasks a model can perform
as a proxy for the drift detection: Either one per-
forms a forecasting task where the goal is to predict
the measurement of next time step x
t+1
based on the
sensor measurements collected up to time t, or one
performs an interpolation task where the goal is to
predict one sensor by the measurements of all other
sensors, i.e. for each node position i, a model f
i
:
R
n−1
→ R , f
i
(x
t
\i
) = ˆx
t
i
is trained, where x
t
\i
means
we take all measurements but that of node i at time t.
The latter strategy has been employed as a virtual sen-
sor imputation strategy in case of sensor faults. Even
very simple ML models could successfully perform
the interpolation task (Vaquet et al., 2022). As we
observed worse results for forecasting in preliminary
experiments, we only cover interpolation in this work.
4.2 Distribution-Based Drift Detection
Most distribution-based approaches follow the strat-
egy of comparing two samples (Hinder et al., 2023c).
This can be done by statistical testing, e.g. by using
the Kolmogorov-Smirnow (KS) test (Kolomogorov,
1933) feature-wise or the kernel two-sample test
which relies on the maximum mean discrepancy
(MMD) and uses a kernel matrix as a descriptor (Gret-
ton et al., 2006). Another option is using a virtual
classifier discriminating between the two windows.
In case it performs better than guessing, the distri-
butions of the windows differ, i.e. a drift occurred.
We will consider the D3 detection scheme (G
¨
oz
¨
uac¸ık
et al., 2019) in our experiments.
We additionally consider a block-based detection
scheme searching directly for a dependency of data
and time which was identified to be an equivalent de-
scription of drift by (Hinder et al., 2020). This task
can be performed by a standard independence test; in
this work, we will make use of the HSIC-test (Gretton
et al., 2007) which is another kernel-based method.
As discussed in section 2, different kinds of daily,
weekly, and seasonal patterns have to be expected.
These patterns introduce certain temporal dependen-
cies to the data. As already discussed, these pat-
terns might increase the difficulty of detecting leak-
ages. Considering this from a theoretical viewpoint,
this problem can be summarized by the need to ac-
count for the temporal dependencies when perform-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
298
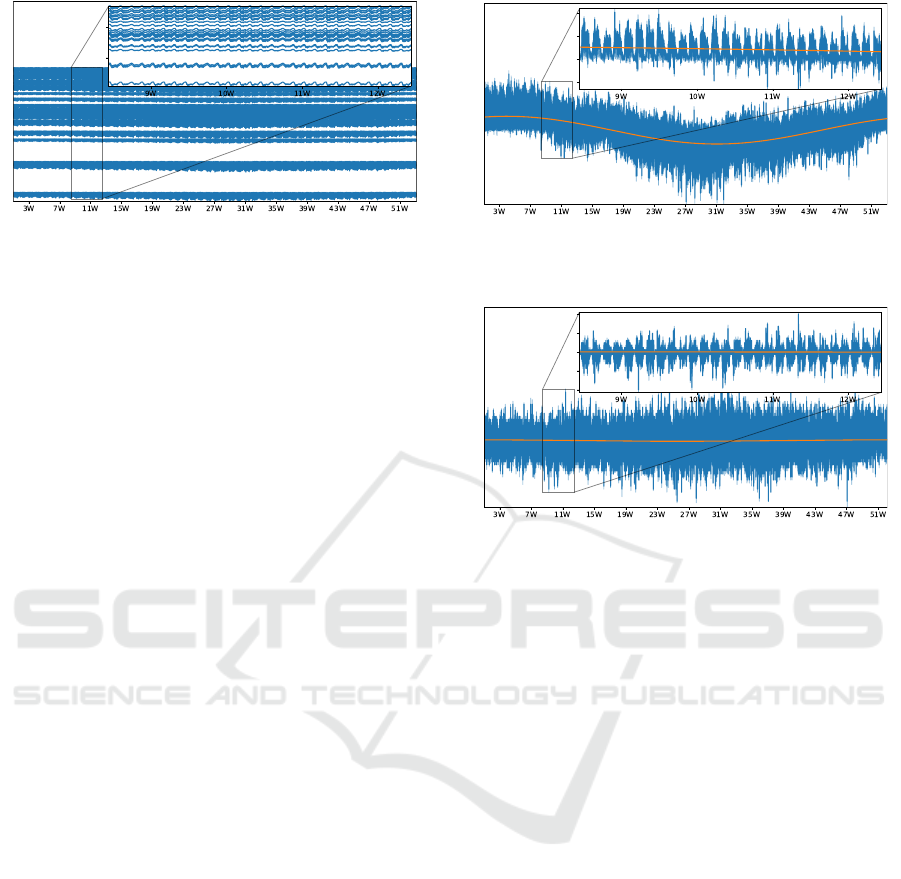
Figure 1: Sensor data for one year (no leakage).
ing drift detection. Thus, in the next section, we will
analyze the temporal patterns in the data.
5 TEMPORAL DEPENDENCIES
IN THE DATA
We already raised the issue of temporal dependencies
in data collected from WDNs. In this section, we will
analyze the dataset which we will use in our experi-
ments later on. For this purpose, we will first briefly
introduce the dataset and provide our analysis.
5.1 L-Town Benchmark Data
In this work, we will consider the L-Town network
since it is relatively complex in comparison to other
benchmarks and one year of realistic real-time de-
mands are available for this system allowing us to
simulate realistic data for our experimental evalua-
tion. The L-Town network resembles parts of the
old town of Limassol, Cyprus. In our experiments,
we consider area A consisting of 661 nodes and
764 edges with 29 optimally placed pressure sen-
sors (Vrachimis et al., 2022). We run simulations
with four different leakage sizes ranging from 7mm
to 19mm at all pipes using the ATMN package which
builds on EPANET. Each scenario contains data for
364 days with a measuring frequency of 15 minutes.
We always consider one leakage per scenario which
starts at some point of the scenario and stays present
until the scenario ends.
5.2 Analysis
Analyzing the data, as expected we observe daily,
weekly, and seasonal patterns. As visualized in fig. 1,
the pressure follows a clear weekly pattern as can be
seen in the zoom-in subplot. To control those depen-
dencies we perform two analysis strategies: 1) sub-
tracting the “standard week”, 2) subtracting the values
of the previous week.
Figure 2: Sensor residuals after subtracting the standard
week (no leakage). The orange line marks the mean trend
across all sensors.
Figure 3: Sensor residuals after subtracting the value of last
week (no leakage). The orange line marks the mean trend
across all sensors.
By subtracting the standard week from the origi-
nal signals we obtain the signals shown in fig. 2. The
plot shows one example sensor reading (blue line) as
well as the minimal and maximal sensor reading at
each given point in time as the shaded area. As can be
seen, the feature runs across the entire range imply-
ing very strong fluctuations. Furthermore, as can be
seen in the zoomed-in plot there is a change in fluc-
tuation that follows a daily pattern. We also added
a trend line (orange) which follows a cosine shape.
This is a plausible finding as we expect a cyclic pat-
tern across several years that correlates with the sea-
sons. However, this pattern may render change detec-
tion schemes useless as it induces changes that are not
caused by leaks.
As an alternative, we considered subtracting the
value of the last week rather than a standard week.
The results are illustrated in fig. 3. Due to the small
variance in the computation of the standard week, this
is already a good proxy for the standard week. How-
ever, it is better suited to cope with long-term changes
as can be seen from the trend line. Furthermore,
we again observe strong oscillations whose intensities
follow a daily pattern. We will find that this strategy
is quite efficient in section 6.1.
From both analyses, we expect that we can easily
cope with the periodic patterns if we only compare
the data on a by-week basis. This is because there is a
Investigating the Suitability of Concept Drift Detection for Detecting Leakages in Water Distribution Networks
299

noticeable difference between the values of weekends
and weekdays so that day-wise is too short to resolve
this dependency. Furthermore, longer periods will be
strongly affected by the seasonal trends. We will fur-
ther discuss those ideas in the next section.
5.3 Coping with Temporal
Dependencies
We observed substantial temporal patterns in the data
which we need to account for when utilizing drift de-
tection schemes for the task of detecting leakages. For
model-loss-based drift detection approaches we as-
sume that the models can generalize well. Thus, in
this setting, no additional actions need to be taken. In
contrast, when using distribution-based schemes, we
need to carefully incorporate our knowledge of the
different temporal cycles in the data to successfully
detect leakages.
In preliminary experiments, we used a pre-
processing technique, which subtracted a standard
week to eliminate cycles in the data. However, this
strategy assumes that we can model this standard
week successfully which requires some leakage-free
historical data. Since we aim to develop a method-
ology that requires as little information as possible
to generalize to new networks, we additionally ex-
perimented with choosing the window sizes such that
the detection schemes do not suffer from seasonali-
ties. Here, as discussed before, our idea is to elimi-
nate the cyclic patterns by choosing exactly one week
per window. Thereby daily and weekly patterns are
eliminated while the windows are still small enough
to not be affected by long-term dependencies. Since
this strategy resulted in better results while requiring
no additional information, we will use this option in
our experimental evaluation instead of performing a
preprocessing step subtracting the standard or the pre-
viously observed week.
6 EXPERIMENTS
For all our experiments
2
, we use the data benchmark
which we described in section 5.1.
6.1 Model-Loss-Based Drift Detection
To evaluate the model-loss-based detection schemes
we rely on different regression models: kNN, polyno-
mial ridge regression, random forests, and linear ridge
2
The experimental code and hyperparameters are avail-
able at https://github.com/FabianHinder/Drift-and-Water
regression. RBF-ridge and RBF-/Poly-/Linear-SVR
were considered but discarded after initial considera-
tions due to weak performances in the regression task.
In our experiments, we first analyze the models’ per-
formance on the interpolation task, and their gener-
alization capabilities to out-of-sample examples, e.g.
to scenarios containing leakages. In the second step,
we analyze how well the schemes are suited for de-
tecting leakages. To do so we check the underlying
assumption that the model would perform better on
the original training data (without leakage) compared
to the leaky data. For this to facilitate a useful strat-
egy we need to be able to define a threshold θ such
that MSE(x
t
) > θ indicates a leakage at time t and
vice versa. Considering this as a classification prob-
lem with the classes “no leakage” and “leakage” we
can apply the ROC-AUC score to evaluate the perfor-
mance of our models. To be more resilient to slowly
growing leakages we do not consider model updates.
Thus, we end up with the following procedure:
1. Select one fold. Extract two consecutive weeks
from the baseline dataset
2. Train the interpolation model on the data
3. Compute the errors of the model for the remaining
year for each data point E
0
4. Compute the errors of the model for the entire
year for each leakage location and size E
1
5. Compute the detection performance for this fold
ROC-AUC([0, .. ., 0 , 1,...,1],E
0
+ E
1
)
Recall that the ROC-AUC measures how well the ob-
tained scores separate the leaky and non-leaky setups.
The score is 1 if the largest error without leakage is
smaller than the smallest error with leakage, it is 0.5
if the assignment is random. Thus, the ROC-AUC
provides a scale-invariant upper bound on the perfor-
mance of every concrete threshold. It is not affected
by class imbalance.
The results of our experiment evaluating the gen-
eralization ability are summarized in fig. 4. The ob-
served errors increase with increasing leakage diam-
eters and the models generalize to small leakages. In
this setting, we find that the simple linear models per-
form much better than the kNN and the random forest.
This aligns with findings published in (Vaquet et al.,
2022).
The evaluation of the detection experiments is
summarized in fig. 5. We observe reasonable ROC-
AUC scores for leakage sizes of about 15mm-19mm.
However, small leakages pose a difficult problem for
model-loss-based drift detection schemes: the scores
are only marginally above random guessing.
In summary, we find that model-loss-based de-
tection schemes are only suitable for detecting large
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
300
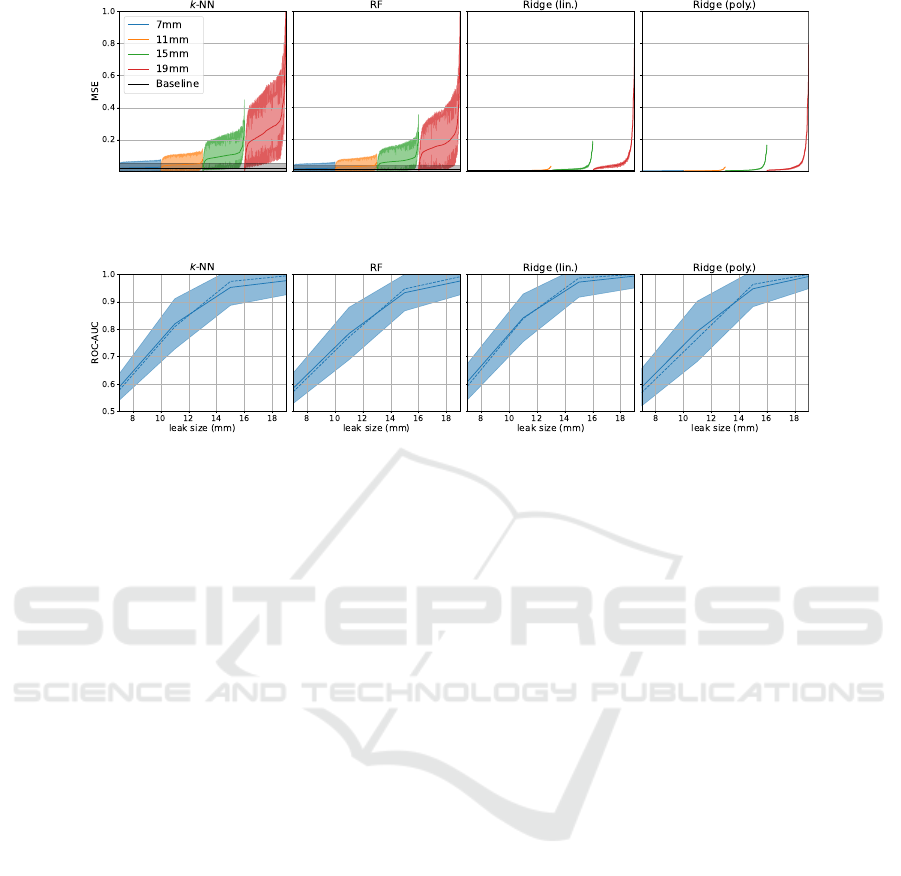
Figure 4: Mean squared error of the interpolation for different leakage sizes. Sorted (x-axis) ascending for each leakage size
and mean error for clarity. Setting without leakage is reported as baselines. Line marks mean value, shaded area is minimal
value to mean+standard deviation.
Figure 5: ROC-AUC for the model-loss-based drift detection for increasing leakage sizes. Interpolation task. Solid line marks
mean value, shaded area mean±standard deviation, dashed line median.
leakages since the models generalize too well to out-
of-distribution samples to reliably detect small leak-
ages. This aligns with both results of other works and
the theory we briefly discussed in section 4.
6.2 Distribution-Based Drift Detection
Concerning distribution-based drift detection (see
section 4.2), as argued before, choosing a suitable
window size is crucial for the successful usage of
distribution-based drift detection schemes. Analyzing
the system we decided to rely on two windows of one
week each to eliminate the temporal patterns from the
data. In addition to the choice of window size, the
position of the split point, i.e. the border of the two
considered windows, affects the performance of the
detection scheme. The larger the displacement from
the actual leakage onset time, the harder the detection
will be. However, as it is desirable to detect leakages
as soon as possible, it would be desirable to detect
leakages even if the displacement is still large, e.g. if
the split point still lies before the leakage occurred.
Fig. 6 summarizes the results of the distribution-
based detection schemes with the different models.
Assuming the split point lies exactly on the leak-
age, we report much better detection results than for
the model-loss-based detection strategies. We report
smaller scores for DAWIDD which is to be expected
in this case as the model is not benefiting from our
window size choice due to its block-based nature and
is thus affected by the temporal dependencies in the
oscillations. While we obtain smaller scores for the
statistical test-based methods for small leakages, the
virtual classifier-based methods reliably detect leak-
ages of a diameter of 7mm.
As assumed, concerning the position of the split
point, we observe a decline in the score with increas-
ing displacement. However, even for a displacement
of 4 days, we obtain better scores than for the best
model-based detection schemes. For a displacement
of 6 days, we still get reasonable scores for large leak-
ages when using the D3 detection scheme with a lin-
ear model. Thus, detecting large leakages can be re-
alized very fast, while for smaller leakages it takes a
little more time to obtain a reliable warning.
These findings can be confirmed when analyzing
fig. 7. One can see that apart from the smallest leak-
age size, with a displacement of 4 days, i.e. 3 days
after the leakage occurred, most detection schemes
yield a reasonable score. Using the linear version of
D3 even the smallest considered leakages can be de-
tected with a delay of 5 days (displacement of 2 days).
In conclusion, we found that distribution-based
detection schemes outperform model-based detection
across all leakage sizes if the window size is chosen
suitably. Large leakages can be detected with a rea-
sonably small delay. In practical applications imple-
menting a warning mechanism early on could be real-
ized to react early on.
6.3 Leakage Localization
Besides the task of leakage detection, there is also the
more specific task of leakage localization, i.e. deter-
Investigating the Suitability of Concept Drift Detection for Detecting Leakages in Water Distribution Networks
301
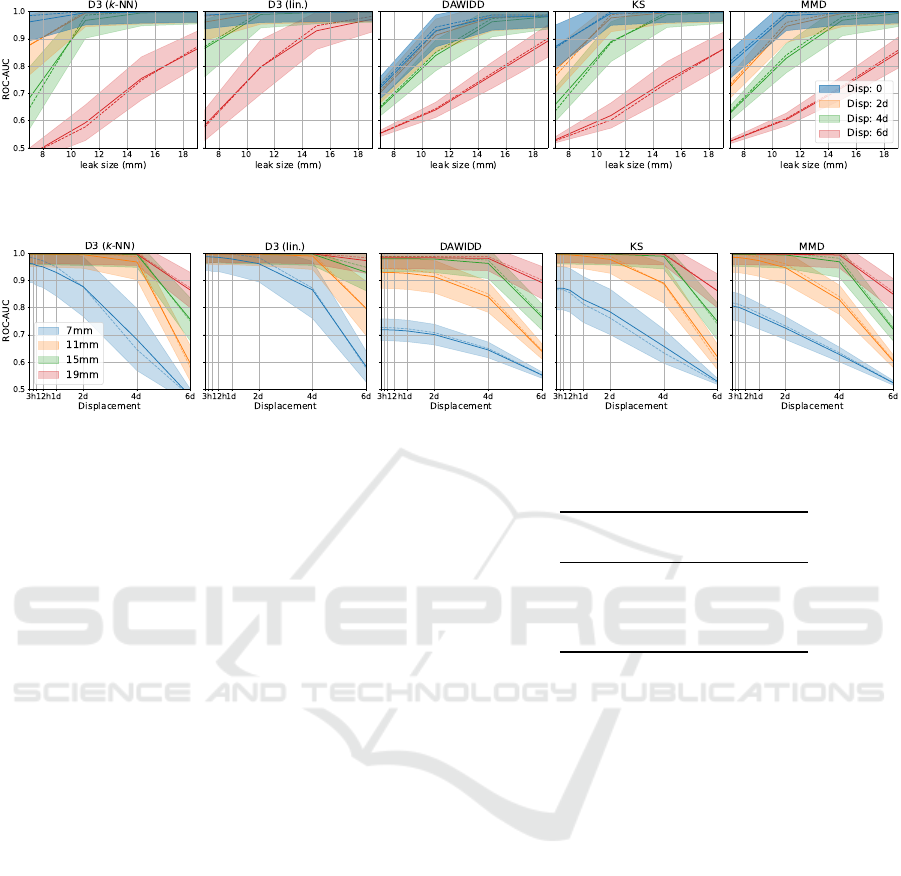
Figure 6: Performance of unsupervised drift detectors for different displacements (discrepancy between split point (assumed
time-point of drift) and actual drift). Solid line marks mean value, shaded area mean±standard deviation, dashed line median.
Figure 7: Performance of unsupervised drift detectors for different leakage sizes. Solid line marks mean value, shaded area
mean±standard deviation, dashed line median.
mining the pipe where the leakage occurs (Vrachimis
et al., 2022). This task is usually considered much
harder and is commonly approached by formulating
an inverse problem, i.e. evaluating the plausibility
of different locations (Li et al., 2022; Daniel et al.,
2022; Wang et al., 2022; Marzola et al., 2022). This
again requires a lot of data usually not available to
us. As our drift detection approach performed quite
well on the detection task we consider the possibil-
ity to extend the methodology to leakage localization.
Here the idea is quite simple: the closer a sensor is
to the leakage’s actual position, the stronger the influ-
ence and thus the drift, leading to a particularly small
p-value for that feature. As only the Kolmogorov-
Smirnov test operates feature-wise we consider this
scheme using the same same setup as before. We re-
turn the sensor node that has the smallest p-value, i.e.
is considered to be particularly drifting by the test.
In the following let S be all sensor nodes, s
∗
be the
selected sensor node, and v be the node where there
leakage actually occurred, even if it is not the sen-
sor node. Furthermore, d denotes the graph distance
in the WDN, i.e. d(a,b) is the length of the short-
est path connecting a and b. We make use of three
metrics: distance between selected and actual node
(Dist.; d(s
∗
,v)), number of sensor nodes closer to the
actual node (#Cls.; |{s ∈ S | d(s, v) < d(s
∗
,v)}|), and
relative distance between actual node, selected and
optimal node (rel.D.; d(s
∗
,v)/ min
s∈S
d(s,v)) which
is normalized in contrast to the simple distance and
smooth in contrast to the closer node metric.
The results are shown in table 1. They are quite
promising. We observe that the precision is decreas-
Table 1: Results of leakage localization.
size Dist. rel.D. #Cls.
(mm) µ±σ µ±σ µ±σ
7 10.1±13.1 2.6±4.9 3.3±7.0
11 5.5±4.7 1.3±1.4 0.6±2.0
15 5.1±3.9 1.2±1.2 0.5±1.5
19 5.0±3.6 1.2±1.1 0.4±1.4
ing for smaller leakage sizes, which is to be expected
considering the results from the last experiment.
7 CONCLUSION
In this work, we investigated the suitability of
model-loss-based and distribution-based drift detec-
tion methods. Combining distribution-based detec-
tion with knowledge of WDNs, we provide detection
schemes that successfully detect leakages of all sizes
with reasonable detection delays. Analyzing model-
loss-based techniques that are widely implemented in
the water domain, we confirmed theoretical results
that raise the issue of the loose connection between
model loss and drift.
We assume that our work is not limited to WDNs
but can also be realized for anomaly detection in other
critical infrastructure systems like gas or electrical
grids. In practical applications a further analysis of
the leakages is necessary – solely detecting leakages
is not sufficient to take appropriate actions. We pro-
posed a first localization strategy that is based di-
rectly on detection efforts. Considering these follow-
up tasks in more detail through the lens of concept
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
302

drift both practically and theoretically is an interest-
ing path for further research.
ACKNOWLEDGEMENTS
We gratefully acknowledge funding from the Eu-
ropean Research Council (ERC) under the ERC
Synergy Grant Water-Futures (Grant agreement No.
951424).
REFERENCES
European Commission (2021). Artificial Intelligence Act.
Cardell-Oliver, R. and Carter-Turner, H. (2021). Activity-
aware privacy protection for smart water meters. In
8th ACM BuildSys, BuildSys ’21, page 31–40. Asso-
ciation for Computing Machinery.
Daniel, I., Pesantez, J., Letzgus, S., Khaksar Fasaee, M. A.,
Alghamdi, F., Berglund, E., Mahinthakumar, G., and
Cominola, A. (2022). A Sequential Pressure-Based
Algorithm for Data-Driven Leakage Identification and
Model-Based Localization in Water Distribution Net-
works. J. Water Resour. Plan. Manag., 148.
Eliades, D. G. and Polycarpou, M. M. (2010). A Fault Di-
agnosis and Security Framework for Water Systems.
IEEE Transactions on Control Systems Technology,
18(6):1254–1265.
G
¨
oz
¨
uac¸ık,
¨
O., B
¨
uy
¨
ukc¸akır, A., Bonab, H., and Can, F.
(2019). Unsupervised concept drift detection with a
discriminative classifier. In Proceedings of the 28th
ACM international conference on information and
knowledge management, pages 2365–2368.
Gretton, A., Borgwardt, K. M., Rasch, M. J., Sch
¨
olkopf,
B., and Smola, A. J. (2006). A kernel method for the
two-sample-problem. In NIPS 2006, pages 513–520.
Gretton, A., Fukumizu, K., Teo, C. H., Song, L., Sch
¨
olkopf,
B., and Smola, A. J. (2007). A kernel statistical test of
independence. In NIPS 2007, pages 585–592.
Hinder, F., Artelt, A., and Hammer, B. (2020). Towards
non-parametric drift detection via dynamic adapting
window independence drift detection (DAWIDD). In
ICML 2020, volume 119, pages 4249–4259. PMLR.
Hinder, F., Vaquet, V., Brinkrolf, J., and Hammer, B.
(2023a). On the Change of Decision Boundary and
Loss in Learning with Concept Drift. In IDA XXI, vol-
ume 13876, pages 182–194. Springer Nature Switzer-
land, Cham.
Hinder, F., Vaquet, V., Brinkrolf, J., and Hammer, B.
(2023b). On the Hardness and Necessity of Super-
vised Concept Drift Detection:. In 12th ICPRAM,
pages 164–175, Lisbon, Portugal. SCITEPRESS.
Hinder, F., Vaquet, V., and Hammer, B. (2023c). One or
two things we know about concept drift – a survey on
monitoring evolving environments.
Hu, C., Li, M., Zeng, D., and Guo, S. (2018). A survey on
sensor placement for contamination detection in water
distribution systems. Wireless Networks, 24(2):647–
661.
Kolomogorov, A. (1933). Sulla determinazione empirica di
una legge didistribuzione. Giorn Dell’inst Ital Degli
Att, 4:89–91.
Lambert, A. (1994). Accounting for Losses: The Bursts and
Background Concept. Water and Environment Jour-
nal, 8(2):205–214.
Laucelli, D., Romano, M., Savi
´
c, D., and Giustolisi, O.
(2016). Detecting anomalies in water distribution net-
works using EPR modelling paradigm. Journal of Hy-
droinformatics, 18(3):409–427.
Li, Z., Wang, J., Yan, H., Li, S., Tao, T., and Xin, K. (2022).
Fast Detection and Localization of Multiple Leaks in
Water Distribution Network Jointly Driven by Simu-
lation and Machine Learning. J. Water Resour. Plan.
Manag., 148(9).
Marzola, I., Mazzoni, F., Alvisi, S., and Franchini, M.
(2022). Leakage Detection and Localization in a Wa-
ter Distribution Network through Comparison of Ob-
served and Simulated Pressure Data. J. Water Resour.
Plan. Manag., 148(1):04021096.
Rodell, M., Famiglietti, J. S., Wiese, D. N., Reager, J.,
Beaudoing, H. K., Landerer, F. W., and Lo, M.-H.
(2018). Emerging trends in global freshwater avail-
ability. Nature, 557(7707):651–659.
Romano, M., Kapelan, Z., and Savi
´
c, D. A. (2014). Auto-
mated Detection of Pipe Bursts and Other Events in
Water Distribution Systems. J. Water Resour. Plan.
Manag., 140(4):457–467.
Romero-Ben, L., Alves, D., Blesa, J., Cembrano, G., Puig,
V., and Duviella, E. (2022). Leak Localization in
Water Distribution Networks Using Data-Driven and
Model-Based Approaches. J. Water Resour. Plan.
Manag., 148(5).
Rossman, L. A. (2000). EPANET 2: users manual. US
Environmental Protection Agency. Office of Research
and Development.
Steffelbauer, D. B., Deuerlein, J., Gilbert, D., Abraham, E.,
and Piller, O. (2022). Pressure-Leak Duality for Leak
Detection and Localization in Water Distribution Sys-
tems. J. Water Resour. Plan. Manag., 148(3).
Vaquet, V., Artelt, A., Brinkrolf, J., and Hammer, B.
(2022). Taking Care of Our Drinking Water: Deal-
ing with Sensor Faults in Water Distribution Net-
works. In ICANN 2022, volume 13530, pages 682–
693. Springer Nature Switzerland, Cham.
V
¨
or
¨
osmarty, C. J., McIntyre, P. B., Gessner, M. O., Dud-
geon, D., Prusevich, A., Green, P., Glidden, S., Bunn,
S. E., Sullivan, C. A., Liermann, C. R., et al. (2010).
Global threats to human water security and river bio-
diversity. nature, 467(7315):555–561.
Vrachimis, S. G., Eliades, D. G., Taormina, R., Kapelan, Z.,
Ostfeld, A., Liu, S., Kyriakou, M., Pavlou, P., Qiu, M.,
and Polycarpou, M. M. (2022). Battle of the Leakage
Detection and Isolation Methods. Journal of Water
Resources Planning and Management, 148(12).
Wang, X., Li, J., Liu, S., Yu, X., and Ma, Z. (2022). Mul-
tiple Leakage Detection and Isolation in District Me-
tering Areas Using a Multistage Approach. J. Water
Resour. Plan. Manag., 148(6).
Investigating the Suitability of Concept Drift Detection for Detecting Leakages in Water Distribution Networks
303
