
Using the Polynomial Particle-in-Cell Method for Liquid-Fabric
Interaction
Robert Dennison and Steve Maddock
The University of Sheffield, U.K.
fi
Keywords:
Physically-Based Modeling, Fluid Simulation, Cloth Simulation.
Abstract:
Liquid-fabric interaction simulations using particle-in-cell (PIC) based models have been used to simulate a
wide variety of phenomena and yield impressive visual results. However, these models suffer from numerical
damping due to the data interpolation between the particles and grid. Our paper addresses this by using the
polynomial PIC (PolyPIC) model instead of the affine PIC (APIC) model that is used in current state-of-the-
art wet cloth models. Theoretically, PolyPIC has lossless energy transfer and so should avoid any problems
of undesirable damping and numerical viscosity. Our results show that PolyPIC does enable more dynamic
coupled simulations. The use of PolyPIC allows for simulations with reduced numerical dissipation and
improved resolution of vorticial details over previous work. For smaller scale simulations, there is minimal
impact on computational performance when using PolyPIC instead of APIC. However, as simulations involve
a larger number of particles and mesh elements, PolyPIC can require up to a 2.5× as long to generate 4.0s of
simulation due to a requirement for a decrease in timestep size to remain stable.
1 INTRODUCTION
In physics-based simulations for computer graphics,
increasing attention is being focused on simulations
involving a combination of two or more physical me-
dia. One area of particular interest is simulating the
complex interactions between fluid and porous fabric.
The liquid-fabric interaction model of Fei et al (Fei
et al., 2018) is widely considered as the state-of-the-
art for this kind of coupled simulation. They make use
of the affine particle-in-cell (APIC) model for the flu-
ids and the material point method (MPM) using APIC
transfers for cloth and yarn objects.
Particle-in-cell (PIC) methods are a class of hybrid
Eulerian-Lagrangian simulation methods, designed to
benefit from the ease of particle advection found in
Lagrangian methods with the simplicity of calculat-
ing forces and material properties on a regular Eule-
rian grid. In each time step, particle information is
interpolated to nearby grid nodes where an updated
velocity can be calculated. This new velocity can then
be interpolated back to the particles which can be ad-
vected through the simulation domain. A known issue
with PIC methods is that they suffer from numerical
dissipation, as the interpolation stages act as a filter of
high frequency and rotational velocities. This means
that fluid simulations using PIC methods can seem
overly viscous. APIC was introduced as an improve-
ment to the standard PIC model (Jiang et al., 2015)
and was developed to reduce the numerical dissipa-
tion by considering rotational velocity. Since its in-
troduction, APIC has seen wide adoption by the vi-
sual effects industry.
While APIC was developed in an effort to reduce
damping of rotational velocities, it has been shown to
still be introduce numerical damping. This makes it
more challenging to use real world values for viscos-
ity and elasticity, as the model will introduce viscosity
numerically. The polynomial particle-in-cell model
(PolyPIC) was introduced as a generalised extension
of APIC to further reduce numerical dissipation (Fu
et al., 2017), and has been shown to theoretically be
able to achieve lossless energy transfers during the in-
terpolation stages. By using a method with reduced
energy loss, real world empirical data can be used as
the model parameters, allowing for easier recreation
of real world scenes by artists.
Our paper is the first to use PolyPIC for liquid-
fabric interactions. We improve the work of Fei et
al by incorporating polynomial transfers between the
particles and grid. By substituting the affine trans-
fers of APIC for higher order polynomials, the nu-
merical damping of the model can be reduced. This
also requires an alteration of some aspects of the pre-
244
Dennison, R. and Maddock, S.
Using the Polynomial Particle-in-Cell Method for Liquid-Fabric Interaction.
DOI: 10.5220/0012359300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 244-251
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
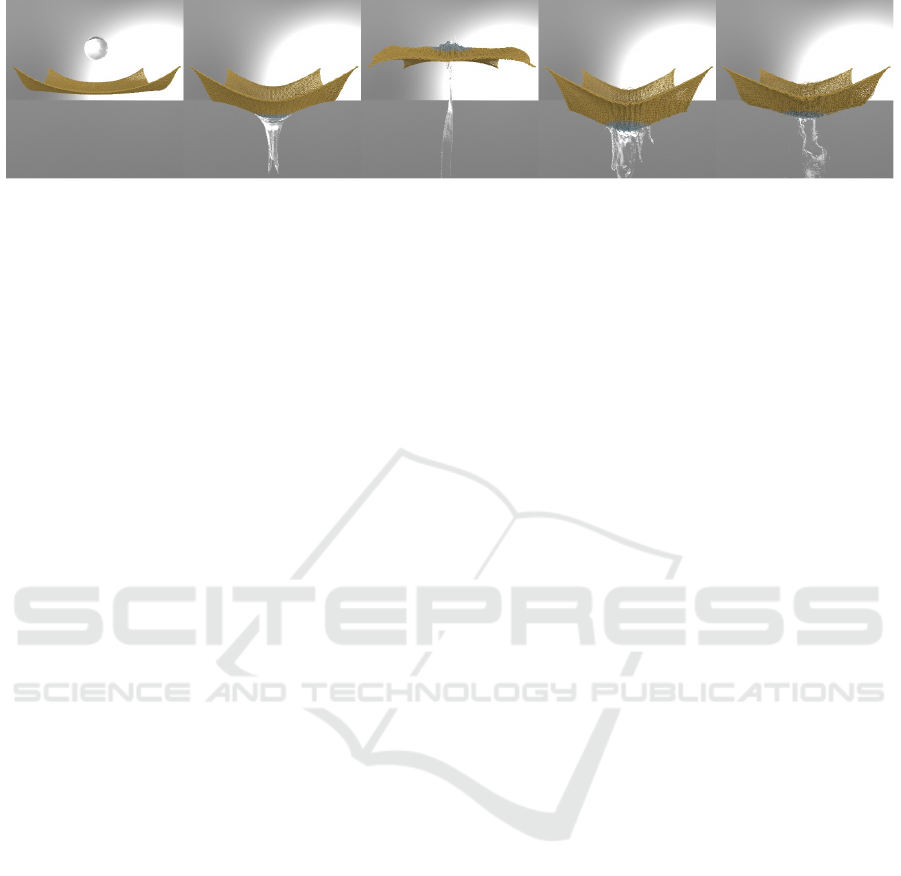
Figure 1: Fluid splashing onto a square of yarn fabric using PolyPIC transfers.
sented PolyPIC method to improve simulation stabil-
ity. The results give a comparison of PolyPIC with
APIC for coupled simulation scenarios and demon-
strate that PolyPIC provides improved preservation of
rotational velocity, leading to more dynamic simula-
tions. The presented scenarios give a comparison of
APIC and PolyPIC in a pure fluid simulation to show-
case the differences of the two simulation approaches.
The remainder of this paper is structured into five
sections. Section 2 describes related work. Sec-
tion 3 explains the implementation of PolyPIC for the
liquid-fabric simulation. The results in section 4 pro-
vide a comparison of PolyPIC and APIC, with a dis-
cussion in section 5. Section 6 presents conclusions.
2 RELATED WORK
Early work on wet cloth models focused on non-
porous thin shells interacting with fluids (e.g. (Harada
et al., 2007)), with subsequent work involving porous
volumes (Lenaerts et al., 2008). The main drawback
of this work was that it used a smoothed particle hy-
drodynamics framework, thus requiring a large num-
ber of particles internal to the object’s volume and
impacting on computational performance. Huber et
al (Huber et al., 2011) improved the computational
performance by using a cellular automata approach
which allowed for simple parallelization. Patkar et
al (Patkar and Chaudhuri, 2013) used a mesh-based
approach for solid simulation to remove the need for
simulating large numbers of solid particles and also
incorporated additional fluid effects such as dripping
and surface flow.
Further developments came with the application
of position based dynamics (M
¨
uller et al., 2007) to
the model presented by Lenaerts et al, thus allowing
for larger time steps to be used (Shao et al., 2018).
Another recent development by Fei et al (Fei et al.,
2018) demonstrates both a porous cloth model using
discrete shells (Grinspun et al., 2003) and discrete
rods (Bergou et al., 2008) discretized using the ma-
terial point method (MPM) (Sulsky et al., 1994) for
cloth and yarn simulations, respectively. Zheng et al
then added further realism to liquid-yarn interactions
by modelling the defects in the constituent fibres of a
material (Zheng et al., 2021). However, this work has
currently only been used to model static fabric.
Particle-in-cell methods have seen extensive use
since first being introduced by Harlow et al (Har-
low, 1962). The severe numerical dissipation of this
method due to filtering caused by the number of inter-
polation steps led to the development of the fluid im-
plicit particle (FLIP) method, which bypassed some
of the interpolation steps to increase the dynamism of
simulations by interpolating only the change in veloc-
ity from the grid to the particles rather than interpo-
lating the velocity (Brackbill and Ruppel, 1986). The
major drawback of the FLIP method was that reduced
dissipation came at the cost of introducing more noise
and instability to the simulations.
Jiang et al (Jiang et al., 2015) developed the APIC
method as a way of reducing the numerical dissipation
of PIC in a stable way by storing an affine transform
matrix on each particle, as well as a velocity vector.
This reduced the energy loss of the PIC method and
improved the stability of FLIP, and also improved the
preservation of angular momentum of both previous
iterations of the model. Recently PolyPIC (Fu et al.,
2017) was developed as a generalized extension of
APIC to allow for higher order transfers during the
grid/particle transfers, further reducing the numeri-
cal dissipation and improving preservation of angular
momentum. It achieves this by replacing the affine
matrix used to store information about angular mo-
mentum with a more general polynomial function.
The popularity of PIC methods led to their appli-
cation to deformable materials by Sulsky et al to cre-
ate MPM (Sulsky et al., 1994). Subsequent PIC de-
velopments have also continued to be adapted to elas-
tic solids to continually improve MPM simulations,
and MPM has been successfully applied to simulate
a wide variety of materials such as snow (Stomakhin
et al., 2013), viscoelastic solids (Fang et al., 2019)
and even materials with phase changes such as lava
or butter (Stomakhin et al., 2014). Despite the im-
provements of PolyPIC over APIC, PolyPIC has not
yet been adapted to coupled simulation scenarios.
Using the Polynomial Particle-in-Cell Method for Liquid-Fabric Interaction
245
3 METHOD
This paper builds on the work of Fei et al by replacing
the APIC model with the PolyPIC model. APIC and
PolyPIC differ only in the transfer steps (as shown in
Figure 2), meaning PolyPIC transfers can be substi-
tuted into the model in the place of APIC transfers.
Section 3.1 presents the standard PIC model, section
3.2 describes how APIC builds upon this and PolyPIC
is explained in section 3.3. Finally, section 3.4 de-
scribes the application of PolyPIC to a mixture model.
Fei et al used a staggered marker-and-cell (MAC) grid
approach as it provides more accurate central differ-
ences over a standard collocated grid approach, so all
work presented here is applied to MAC grids.
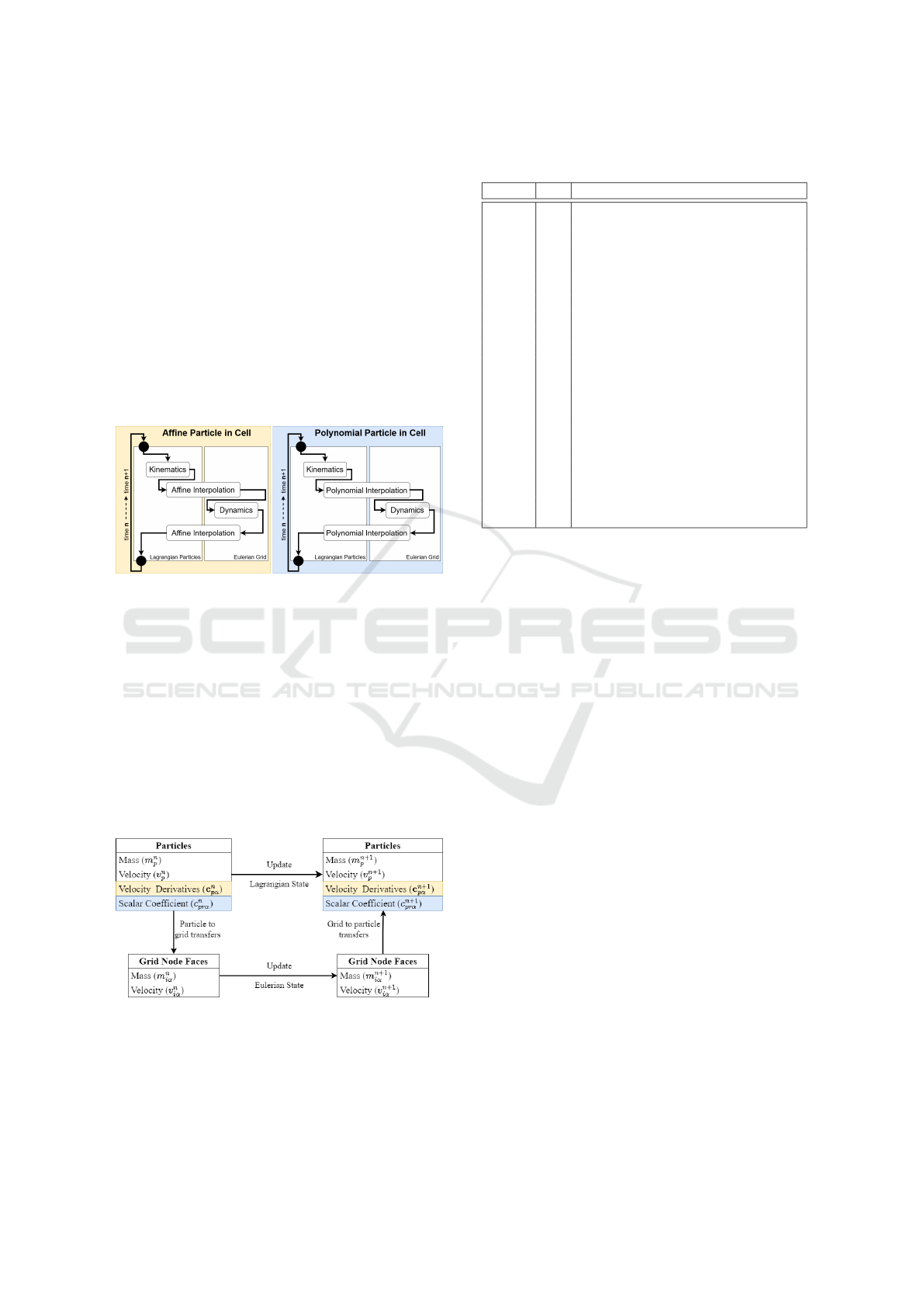
Figure 2: The difference between the APIC and PolyPIC
algorithms is the method of transferring data between the
particles and the grid. PolyPIC uses generalized higher or-
der polynomials whereas APIC uses affine transformation
matrices. (Based on Figure 7 in (Jiang et al., 2015)).
3.1 The Particle-in-Cell Method
The standard PIC model consists of particles which
store information about their mass and velocity,
which is interpolated to/from the grid node faces to
advect the particles around the simulation domain, as
shown in Figure 3. The yellow and blue boxes will be
considered in subsections 3.2 and 3.3, respectively.
Figure 3: The data stored by particles and grid node faces in
PIC methods. White background boxes are consistent be-
tween all PIC variants. Velocity derivatives (yellow back-
ground) are introduced for APIC and scalar coefficients
(blue boxes) are introduced in PolyPIC. (Based on a dia-
gram in (Fu et al., 2017)).
Table 1: Notation used throughout this paper. Values are of
type scalar s, vector v or matrix m.
Notation Type Meaning
∆t s size of time step
∆x s size of grid node
x
p
v position of particle p
x
iα
v position of face α of grid node i
m
p
s mass of particle p
v
p
v velocity of particle p
m
iα
s mass of face α of grid node i
v
iα
v velocity of face α of grid node i
˜v
iα
v intermediate velocity of face α of grid node i
w
ipα
s contribution of particle p to face α of grid node i
m
ipα
s mass contributed by particle p to face α of grid
node i
(mv)
ipα
v momentum contributed by particle p to face α of
grid node i
C
p
m velocity derivatives of particle p, as described in
(Jiang et al., 2015)
c
pα
v velocity derivatives used for MAC grids
c
prα
s scalar coefficient of scalar mode r for particle p in
axis α
I m identity matrix
e
α
v basis vector for axis α
A PIC simulation consists of a total of P particles
and N
i
grid nodes, where superscript n is used for a
given quantity at the current timestep n (e.g. v
n
p
is the
velocity of particle p at timestep n) and α represents
a face of a grid node for each axis 1 ≤ α ≤ d, where
d is the number of dimensions. The notation used
throughout this paper is summarised in Table 1.
In the standard PIC method, each particle stores
its own mass and velocity. A weight function N(x)
is defined to calculate the contribution of a particle
to nearby grid cells during the interpolation steps and
vice versa. Each particle within a nearby region of a
grid node contributes some of its mass to each face
(Equation 1). The mass contribution of each parti-
cle can then be multiplied by the particle’s velocity to
calculate the momentum contribution of each particle
(Equation 2). The momentum contribution can then
be summed over all particles to calculate the total mo-
mentum for the grid node face (Equation 3). The total
mass of the grid node face is the mass contributions
of all particles (Equation 4). Finally, the velocity of
each grid node face can be calculated by dividing the
momentum by the mass (Equation 5).
m
n
ipα
= m
n
p
w
ipα
(1)
(mv)
n
ipα
= m
n
ipα
v
p
(2)
(mv)
n
iα
=
P
∑
p=0
(mv)
n
ipα
(3)
m
n
iα
=
P
∑
p=0
m
n
ipα
(4)
v
n
iα
= (mv)
n
iα
/m
n
iα
(5)
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
246

where w
ipα
= N(x
pα
− x
iα
) is the contribution of par-
ticle p to face α of grid node i.
The mass of a grid node can change throughout
the simulation, but the masses of particles are fixed.
This means when interpolating from the grid nodes
to the particles, we only update the particles’ veloci-
ties. Once the intermediate grid velocities ˜v
iα
n+1
have
been calculated, they are interpolated back to the par-
ticles. To calculate the contribution of grid node mo-
mentum to each particle, first the momentum of each
grid node must be calculated. This is done by mul-
tiplying the mass of each node face by the interme-
diate velocity of each node face and summing over
the number of faces (Equation 6). Then the momen-
tum of each particle can be calculated by summing
the contributed momentum of each grid node over the
number of grid nodes (Equation 7). Finally, the ve-
locity of each particle can be calculated by dividing
the momentum by the particle mass (Equation 8).
(mv)
n+1
ip
=
d
∑
α=1
m
n
ipα
˜v
iα
n+1
(6)
(mv)
n+1
p
=
N
i
∑
i=0
(mv)
n+1
ip
(7)
v
n+1
p
= (mv)
n+1
p
/m
p
(8)
3.2 The Affine PIC Method
In the APIC method, alongside mass and velocity
each particle also stores an affine matrix of velocity
derivatives to enhance the preservation of rotational
velocities (see Figure 3). Equations 1 and 4, used for
transferring mass from the particles to the grid nodes,
remain unchanged for APIC. The updated momentum
transfer takes into account the velocity derivatives to
preserve angular momentum (Equation 9 (Equation
13 in Jiang et al)). The grid momentum can calcu-
lated as with PIC using Equation 3.
(mv)
n
ipα
= m
ipα
(e
α
v
p
+ c
T
pα
(x
p
− x
iα
)) (9)
where m
ipα
is calculated using Equation 1.
The momentum transfers from the grid nodes to
the particles are the same as those used in the standard
PIC method given by Equations 6 - 8. At this stage
the velocity derivatives of a particle, c
pα
, are updated
by calculating the gradient of the weights relating that
particle to the grid node faces, ∇w
ipα
, multiplied by
the intermediate velocity, then summing over all grid
nodes (Equation 10 (Equation 14 in Jiang et al)).
c
n+1
pα
=
N
i
∑
i
∇w
ipα
˜v
iα
n+1
(10)
3.3 The Polynomial PIC Method
PolyPIC replaces the affine matrix of APIC with gen-
eralized polynomials which allow for a wider range of
local behaviour capture (see Figure 3). For PolyPIC
the number of modes used is given by N
r
. It uses
polynomials of the form:
s(z) =
d
∏
β=1
z
i
β
β
(11)
where z
β
is the β
th
component of z ∈ R
d
with i
β
∈ Z
+
.
Before defining the transfers, we must first define
a map of the simulation configuration at time t
n+1
to
t
n
, denoted as ξ
n+1
(x). As described by Fu et al, this
map can take different forms for constant or affine
material motion. Here, the affine map is given by
Equation 12 (Equation 10 in Fu et al).
ξ
n+1
(x) = x
n
p
+ (I + ∆tC
n+1
p
)
−1
(x − x
n+1
p
) (12)
The method of calculating C
n
p
is given in detail
in (Jiang et al., 2015). The momentum transfer from
the particles to the grid is then calculated by taking
the sum of all the scalar modes multiplied by the cor-
responding scalar coefficients, given by Equation 13
(Equation 11 in Fu et al). The momentum contribu-
tion of each particle to the grid node faces can then be
summed over all particles (Equation 3). The veloc-
ity of each grid node face can then be calculated by
dividing the momentum by the mass (Equation 5).
(mv)
n
ipα
= m
n
ipα
N
r
∑
r=0
s
r
(ξ
n
p
(x
iα
− x
n−1
p
)c
n
prα
(13)
where s
r
is scalar mode r. The coefficients c
n
prα
are
calculated as a minimisation problem as described by
Fu et al. To efficiently calculate the coefficients, the
resultant linear system requires each dimension to be
decoupled. The coefficients for modes 1 ≤ r ≤ 2
d
are
naturally mass-orthogonal and so solutions can be ef-
ficiently found. However, higher order coefficients
2
d
< r ≤ N
r
require modification to be orthogonal-
ized. This is achieved by substituting the quadratic
terms, z
β
, in Equation 11 with g
β
(z
β
) defined in Equa-
tion 14. In contrast to the equation presented in Fu et
al, the variables in Equation 14 are modified to or-
thogonalize the matrix, which produces more stable
simulations.
g
β
(z
β
) = (w
n
ip
)
2
− w
n
ip
z
β
(∆x
2
− 4z
2
β
)
∆x
2
−
∆x
2
4
(14)
Again, the momentum transfers from the grid to
the particles are the same as those used in the stan-
dard PIC method given by Equations 6, 7 and 8. At
Using the Polynomial Particle-in-Cell Method for Liquid-Fabric Interaction
247
this stage, the velocity derivatives C
p
can be calcu-
lated using the method described by Jiang et al and
the coefficients c
prα
can be calculated as described by
Fu et al.
3.4 Liquid-Fabric Interaction
The model presented by Fei et al relies on the use of
mixture theory to simulate the interactions between
fluid and cloth (Nielsen and Østerby, 2013). There-
fore, the momentum transfers need to be altered in
order to be applied to mixtures. Let m
n
s,p
be the mass
of a solid particle p at time n and m
n
f ,p
be the mass
of a fluid particle p at time n. The fluid transfers are
then the same as those given in Equations 3, 5 and 13,
except only particles tagged as fluids are considered
(Equations 15 - 17).
(m
f
v
f
)
n
ipα
= m
n
f ,ipα
N
r
∑
r=0
s
r
(ξ
n
p
(x
iα
− x
n−1
p
)c
n
prα
(15)
(m
f
v
f
)
n
iα
=
∑
p
(m
f
v
f
)
n
ipα
(16)
v
n
f ,iα
= (m
f
v
f
)
n
iα
/m
n
f ,iα
(17)
The solid transfers are very similar to the fluid
transfers, except that absorbed fluid particles must
be considered. To take account of absorption, we
must also consider the mass of absorbed fluid par-
ticles when transferring the momentum of solids to
the grid. The total mass of a solid particle is there-
fore given by summing the mass of the solid parti-
cle itself and the mass of the absorbed fluid particle,
(m
n
s,ipα
+ m
n
f ,ipα
). These solid-fluid mixture momen-
tum transfers are given in Equations 18 - 20.
(m
s
v
s
)
n
ipα
= (m
n
s,ipα
+ m
n
f ,ipα
)
N
r
∑
r=0
s
r
(ξ
n
p
(x
iα
− x
n−1
p
)c
n
prα
(18)
(m
s
v
s
)
n
iα
=
∑
p
(m
s
v
s
)
n
ipα
(19)
v
n
s,iα
= (m
s
v
s
)
n
iα
/(m
n
s,ipα
+ m
n
f ,ipα
) (20)
4 RESULTS
Four scenarios have been used to test the model that
has been developed:
• Figure 4 shows a simple dam break scenario to
highlight the differences between APIC fluids and
PolyPIC fluids.
• Figure 5 shows a ball of fluid falling onto a small
square of cloth draped over a sphere.
• Figure 6 shows a ball of fluid falling onto a small
square of yarn-based fabric draped over a sphere.
• Figure 7 is similar to the small yarn scenario but
shows a larger volume of liquid falling onto a
medium sized square of yarn-based fabric.
The latter three scenarios were used by Fei et al,
enabling a comparison of the original model using
APIC and the new model using PolyPIC. In the sim-
ulation results, particle colours are based on current
particle velocity, where dark blue represents a low ve-
locity and red a high velocity. Videos of each simula-
tion can be found in the supplementary video.
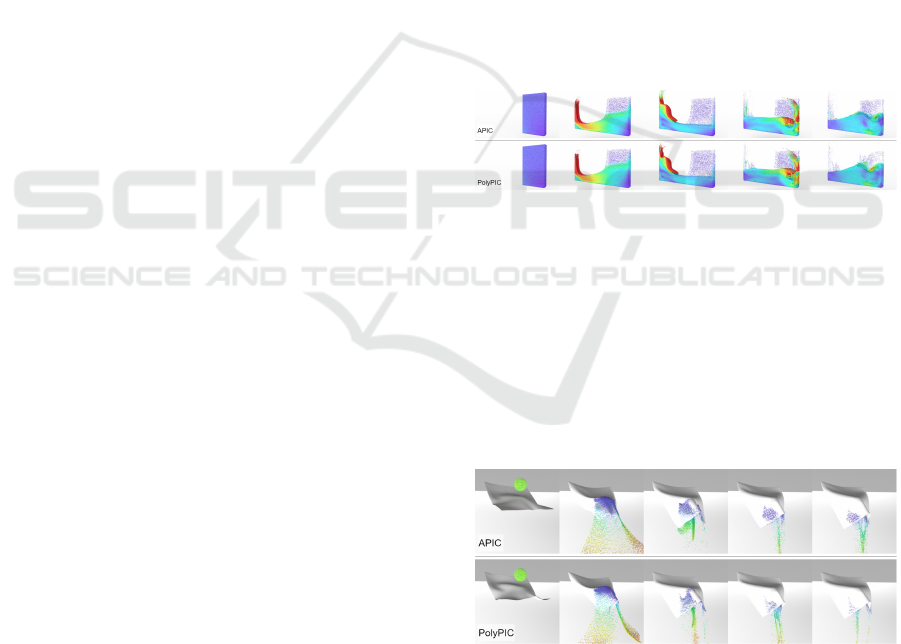
The simple dam break scenario (Figure 4) high-
lights the difference between PolyPIC and APIC out-
side of a coupled simulation context. This shows that
using PolyPIC increases the conservation of angular
momentum and so improves the resolution of vorticial
detail of the fluid. As the final frame shows, PolyPIC
particles have higher velocities than in APIC show-
ing that numerical damping is reduced when using
PolyPIC.
Figure 4: A small dam break scenario using APIC (top) and
PolyPIC (bottom) transfers. Particle colours indicate veloc-
ity (dark blue = low, red = high). PolyPIC shows improved
resolution of vorticial details.
A ball of fluid falling onto a small square of cloth
fabric is shown in Figure 5. This example demon-
strates the reduced numerical damping of PolyPIC
causes less of the fluid to be absorbed by the cloth,
as more splashes off as it is falling. The fluid that
is absorbed exhibits more thin strand behaviour as it
drips from the cloth in PolyPIC than APIC.
Figure 5: Fluid splash onto a small piece of cloth using
APIC (top) and PolyPIC (bottom) transfers. Particle colours
indicate velocity (dark blue = low, red = high). The reduced
damping means that more fluid splashes off the piece of
cloth rather than being absorbed. The fluid that is absorbed
exhibits more thin strand behaviour as it drips from the cloth
in PolyPIC than APIC (see frame 4).
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
248

A ball of fluid falling onto a small square of yarn
fabric is shown in Figure 6. This scenario shows that
the PolyPIC yarns exhibit less sagging than APIC, as
they stretch less under their own weight. The reduced
damping also makes the PolyPIC yarns spring back
from being stretched by the fluid faster.
Figure 6: Fluid splashing onto a small square of yarn fabric
using APIC (top) and PolyPIC (bottom) transfers. Particle
colours indicate velocity (dark blue = low, red = high). The
PolyPIC yarns exhibit less sagging than APIC (see frame
1). The reduced damping makes the PolyPIC yarns spring
back faster from being stretched (see frames 3-5).
Finally, a ball of fluid falling onto a medium
square of yarn fabric is shown in Figure 7. This ex-
ample demonstrates that PolyPIC increases the trans-
fer of energy from the falling fluid to the suspended
yarn. Due to issues with collision detection and res-
olution, this increased transfer of energy causes the
yarns to become more tangled than when using APIC,
as can be seen in the later frames. This scenario is also
shown in Figure 1 as a fully rendered sequence. The
surface reconstruction was performed using SideFx’s
Houdini 3D graphics software (SideFX, 2023). A
more detailed description of the rendering process can
be found in section 4 of the supplemental material of
Fei et al.
Figure 7: Fluid splashing onto a medium sized square of
yarn fabric using APIC (top) and PolyPIC (bottom) trans-
fers. Particle colours indicate velocity (dark blue = low, red
= high). PolyPIC causes more energy to be transferred from
the falling fluid to the yarn and results in a more dynamic
result.
A breakdown of performance information for each
presented example is shown in Table 2. Particles
make up the objects that are being simulated. In the
simulation, all particles are flagged as being either
fluid or solid particles. Fluid particles are the par-
ticles used to simulate the bulk fluid. Elements are
the mesh elements that make up the fabric (triangles
for cloth simulations, rod segments for yarn simula-
tions) and are used for calculating the movement of
absorbed fluids. The ‘small’ simulations use a piece
of fabric that is
1
/4 the size of the ‘medium’ simulation
(
1
/2 of both the width and height). Simulations were
run using an Intel i9-12900K CPU, and each example
was repeated 3 times and the mean performance re-
sults are presented. The source code can be found at
https://github.com/robden820/libwetcloth. For simu-
lations involving PolyPIC, 8 fluid scalar modes and 8
solid scalar modes were used for all examples.
As can be seen in Table 2, as the number of par-
ticles increases, the impact of the additional com-
plexity of the PolyPIC model increases. The dam
break scenarios use the largest number of particles to
clearly demonstrate the difference in fluid behaviours
when using PolyPIC, but also to highlight the addi-
tional computational impact of PolyPIC over APIC.
The small cloth splash scenario has the smallest num-
ber of simulated particles and elements and shows the
smallest difference in seconds per step and peak mem-
ory usage between APIC and PolyPIC of all the exam-
ples. Some of the simulations require use of a smaller
timestep value due to stability issues (see Section 5).
Additionally, an energy plot is presented for the
dam break scenario in Figure 8 and for the interac-
tions scenarios in Figure 9 (due to variation in the
simulation setup, each simulation stabilises around a
different final mean energy). The plots show the mean
energy per particle for the presented scenarios, cal-
culated as the sum of the kinetic energy and gravi-
tational potential energy. Figure 8 shows that for a
simulation involving only fluid particles, the improve-
ment in energy preservation gained by using PolyPIC
in the place of APIC is minimal, however, as shown
in Figure 4 there is still a difference in the simula-
tions visual output achieved using PolyPIC. Figure
9 shows a similar trend for the interaction scenarios,
and PolyPIC has a small impact in the long term en-
ergy preservation of the simulation. However, simu-
lations involving PolyPIC require more time to reach
a stable energy level. The increased oscillations of
PolyPIC before reaching this stable energy level indi-
cate that PolyPIC suffers less from numerical damp-
ing than APIC, leading to more dynamic simulations.
5 DISCUSSION
As shown in the comparison scenarios, visually,
PolyPIC provides a notable increase in simulation dy-
Using the Polynomial Particle-in-Cell Method for Liquid-Fabric Interaction
249
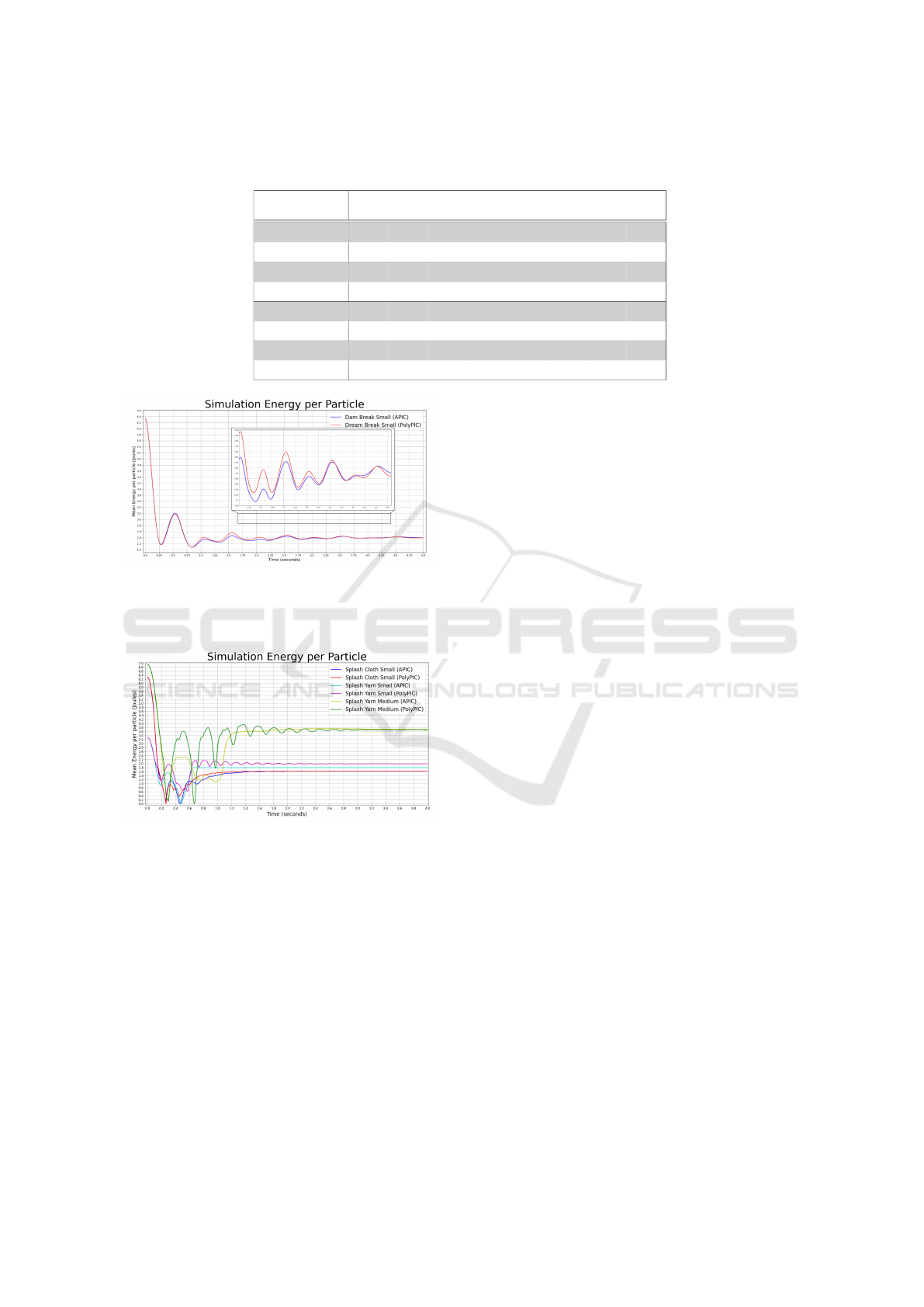
Table 2: Timing and storage data for APIC and PolyPIC for three example scenarios.
†
The dam break simulations involved
no fabric, so required 0 mesh/rod elements.
Example simulation
duration
(s)
timestep
(s)
s/step
(avg)
total
run time
(mins)
peak
memory
(GB)
#particles
(avg)
#fluid
particles
(avg)
#elements
(avg)
Dam Break Small
(APIC)
5.0 0.0002 0.510 217 1.978 310929 310929 0
†
Dam Break Small
(PolyPIC)
5.0 0.0002 1.172 499 2.040 310839 310839 0
†
Splash Cloth Small
(APIC)
4.0 0.0002 0.480 167 0.896 12359 1360 20406
Splash Cloth Small
(PolyPIC)
4.0 0.0001 0.428 282 0.842 12228 1228 20406
Splash Yarn Small
(APIC)
4.0 0.0002 0.454 155 1.056 23074 3471 19799
Splash Yarn Small
(PolyPIC)
4.0 0.0002 0.579 197 1.109 23233 3630 19799
Splash Yarn Medium
(APIC)
4.0 0.0002 1.897 818 9.300 119520 40320 79596
Splash Yarn Medium
(PolyPIC)
4.0 0.00005 1.460 1958 5.764 116416 37213 79596
Figure 8: Mean particle energy for the dam break scenario,
calculated as the sum of kinetic energy and gravitational
potential energy. PolyPIC improves the energy preservation
over APIC, but the effect per particle is minor.
Figure 9: Mean particle energy for the interaction scenarios,
calculated as the sum of kinetic energy and gravitational po-
tential energy. Change in energy preservation in PolyPIC
and APIC is minimal, although the energy of PolyPIC os-
cillates for a longer period before reaching a constant value.
Due to differences in the simulation setup (e.g. fabric at
different world heights, rigid sphere in cloth scenario), each
simulation stabilises around a different final mean energy.
namics. Whilst theoretically PolyPIC has been shown
to be lossless when transferring velocity between the
particles and the grid (shown in the supplementary
material of Fu et al), this can’t be achieved in prac-
tice. For fluids, using polynomial modes involving
multi-quadratic terms (i.e. N
r
> 2
d
) causes the sim-
ulation to become unstable, even when a very small
time step is used. For solids in a non-coupled sce-
nario, the maximum number of modes can be used
without effecting the overall stability of the simula-
tion. However, when simulating coupled interaction,
stability issues become increasingly severe as higher
order modes are introduced.
As can be seen in Table 2, when comparing the
dam break scenarios, an increase in the time required
for each simulation step can be seen when using
PolyPIC rather than APIC. In the interaction scenar-
ios, the time per simulation generally decreases, but
the average number of fluid particles in the simulation
also decreases. The reduced numerical damping of
PolyPIC causes the fluid to splash off the fabric rather
than being absorbed, so the fluid particles leave the
domain of the simulation faster, and the particles are
deleted from the simulation. This reduces the number
of fluid particles to be simulated in later timesteps,
allowing each step to be simulated faster.
The fabric-interaction simulations for APIC were
both able to be simulated using a timestep of ∆t =
2e
−4
s, but using this value for the PolyPIC scenarios
caused the simulation to become unstable. Whilst the
same timestep enabled stable simulation of the small
yarn PolyPIC scenario, we found using a timestep of
∆t = 1e
−4
s and ∆t = 5e
−5
s allowed the small cloth
and medium yarn PolyPIC simulation to remain sta-
ble for their duration, respectively. This means that
while in general there was only a small change in the
time required for each simulation step, the need for
a smaller timestep for PolyPIC resulted in an overall
increase in the time taken to run the simulation, as
shown in Table 2.
Possible future work would be to experiment with
more stable simulation frameworks such as position-
based dynamics (M
¨
uller et al., 2007) which has been
shown to reduce the need for small timesteps. Also,
in the yarn examples, the individual yarns quickly be-
come tangled after collision with the fluid. Using a
more robust collision handling technique such as in-
cremental potential contact (Li et al., 2020) could im-
prove the stability of the simulations.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
250

6 CONCLUSIONS
The work presented by Fei et al is widely consid-
ered to be the state-of-the-art for liquid-fabric inter-
action simulations. This paper has replaced APIC
with PolyPIC in their model and performed a com-
parison of the PolyPIC model with the APIC model
in the context of liquid-fabric interactions. Using
PolyPIC in place of APIC for liquid-fabric interac-
tion improves the dynamism of simulations, increas-
ing energy transfer between the fluid and cloth/yarn
and increasing the resolution of vorticial details and
small scale splashes. However, PolyPIC has a higher
computation cost over APIC and the reduced numer-
ical damping of PolyPIC also caused stability issues
requiring the use of a smaller time step. This require-
ment for smaller timesteps highlights the need for a
greater consideration of techniques to improve simu-
lation stability and inter-yarn collision detection. De-
spite this limitation, this paper demonstrates the po-
tential of PolyPIC as a method of improving liquid-
fabric interaction simulations based on PIC methods.
ACKNOWLEDGEMENTS
This research is supported by a Frank Greaves Simp-
son Scholarship from the University of Sheffield.
REFERENCES
Bergou, M., Wardetzky, M., Robinson, S., Audoly, B., and
Grinspun, E. (2008). Discrete elastic rods. ACM
Transactions on Graphics, 27(3):1–12.
Brackbill, J. and Ruppel, H. (1986). FLIP: A method for
adaptively zoned, particle-in-cell calculations of fluid
flows in two dimensions. Journal of Computational
Physics, 65:314–343.
Fang, Y., Li, M., Gao, M., and Jiang, C. (2019). Silly rub-
ber: an implicit material point method for simulating
non-equilibrated viscoelastic and elastoplastic solids.
ACM Transactions on Graphics, 38:1–13.
Fei, Y. R., Batty, C., Grinspun, E., and Zheng, C. (2018). A
multi-scale model for simulating liquid-fabric interac-
tions. ACM Trans. Graph., 37(4).
Fu, C., Guo, Q., Gast, T., Jiang, C., and Teran, J. (2017).
A polynomial particle-in-cell method. ACM Transac-
tions on Graphics, 36(6):222:1–222:12.
Grinspun, E., Hirani, A., Desbrun, M., and Schr
¨
oder, P.
(2003). Discrete Shells. In Proceedings of the 2003
ACM SIGGRAPH/Eurographics Symposium on Com-
puter Animation.
Harada, T., Koshizuka, S., and Kawaguchi, Y. (2007). Real-
time Fluid Simulation Coupled with Cloth. EG UK
Theory and Practice of Computer Graphics.
Harlow, F. H. (1962). The particle-in-cell method for nu-
merical solution of problems in fluid dynamics. Tech-
nical Report LADC-5288.
Huber, M., Pabst, S., and Straßer, W. (2011). Wet cloth
simulation. In International Conference on Computer
Graphics and Interactive Techniques.
Jiang, C., Schroeder, C., Selle, A., Teran, J., and Stomakhin,
A. (2015). The affine particle-in-cell method. ACM
Transactions on Graphics, 34(4):51:1–51:10.
Lenaerts, T., Adams, B., and Dutr
´
e, P. (2008). Porous
flow in particle-based fluid simulation. ACM Trans.
Graph., 27.
Li, M., Ferguson, Z., Schneider, T., Langlois, T., Zorin,
D., Panozzo, D., Jiang, C., and Kaufman, D. M.
(2020). Incremental potential contact: intersection-
and inversion-free, large-deformation dynamics. ACM
Transactions on Graphics, 39(4).
M
¨
uller, M., Heidelberger, B., Hennix, M., and Ratcliff,
J. (2007). Position based dynamics. Journal of
Visual Communication and Image Representation,
18(2):109–118.
Nielsen, M. B. and Østerby, O. (2013). A two-continua
approach to Eulerian simulation of water spray. ACM
Transactions on Graphics, 32(4):1–10.
Patkar, S. and Chaudhuri, P. (2013). Wetting of Porous
Solids. IEEE Transactions on Visualization and Com-
puter Graphics, 19(9):1592–1604.
Shao, X., Wu, W., and Wang, B. (2018). Position-based
simulation of cloth wetting phenomena. Computer
Animation and Virtual Worlds, 29(1):e1788.
SideFX (2023). Houdini - 3D modeling, animation, VFX,
look development, lighting and rendering | SideFX.
Stomakhin, A., Schroeder, C., Chai, L., Teran, J., and Selle,
A. (2013). A material point method for snow simula-
tion. ACM Transactions on Graphics, 32(4):1–10.
Stomakhin, A., Schroeder, C., Jiang, C., Chai, L., Teran,
J., and Selle, A. (2014). Augmented MPM for phase-
change and varied materials. ACM Transactions on
Graphics, 33(4):1–11.
Sulsky, D., Chen, Z., and Schreyer, H. L. (1994). A par-
ticle method for history-dependent materials. Com-
puter Methods in Applied Mechanics and Engineer-
ing, 118(1):179–196.
Zheng, Y., Chi, X., Chen, Y., and Wu, E. (2021). Stains on
imperfect textile. Virtual Reality & Intelligent Hard-
ware, 3:142–155.
Using the Polynomial Particle-in-Cell Method for Liquid-Fabric Interaction
251
