
An Analysis and Simulation Framework for Systems with Classification
Components
Francesco Bedini
a
, Tino Jungebloud
b
, Ralph Maschotta
c
and Armin Zimmermann
d
Systems & Software Engineering Group, Technische Universit
¨
at Ilmenau, Helmholtzplatz 5, Ilmenau, Germany
Keywords:
Ecore, EMF, SCPN, MMT, Classification, Eclipse, Sirius, Xtext.
Abstract:
Machine learning solutions are becoming more widespread as they can solve some classes of problems better
than traditional software. Hence, industries look forward to integrating this new technology into their prod-
ucts and workflows. However, this calls for new models and analysis concepts in systems design that can
incorporate the properties and effects of machine learning components. In this paper, we propose a frame-
work that allows designing, analyzing, and simulating hardware-software systems that contain deep learning
classification components. We focus on the modeling and predicting uncertainty aspects, which are typical
for machine-learning applications. They may lead to incorrect results that may negatively affect the entire
system’s dependability, reliability, and even safety. This issue is receiving increasing attention as “explain-
able” or “certifiable” AI. We propose a Domain-Specific Language with a precise stochastic colored Petri net
semantics to model such systems, which then can be simulated and analyzed to compute performance and re-
liability measures. The language is extensible and allows adding parameters to any of its elements, supporting
the definition of additional analysis methods for future modular extensions.
1 INTRODUCTION
Artificial intelligence (AI) and machine learning
(ML) are replacing conventional software in various
application fields (Shinde and Shah, 2018), thanks to
the increasing feasibility of deep learning (DL) ap-
proaches. The improvements in the training meth-
ods and the higher computing resources available on
demand and at more accessible prices make it possi-
ble to train a model with large training data to solve
classes of problems faster and better than traditional
software. Example of these problems includes image
recognition (Pak and Kim, 2017) and processing (Jiao
and Zhao, 2019), audio analysis (Schuller, 2013), and
speech recognition (Nassif et al., 2019). With the in-
creasing complexity and scale of these ML models
and the industrial applications they are about to be
used in, it becomes crucial to evaluate their perfor-
mance and assess their reliability.
A disadvantage of ML components from the sys-
tems and software engineering point of view is that
a
https://orcid.org/0000-0002-8354-1835
b
https://orcid.org/0000-0001-8319-9876
c
https://orcid.org/0000-0001-8447-3996
d
https://orcid.org/0000-0001-7439-7686
they behave in principle like black boxes without
a well-understood input-output function. They thus
may or may not deliver the correct result, depending
on multiple factors such as the quality, amount, diver-
sity, or cleansing (Maletic and Marcus, 2005) of the
training data (Liang et al., 2022) or seeing unexpected
data once in production.
ML suffers from two different kinds of uncertain-
ties: aleatoric (or statistical) uncertainty which is in-
herently related to a probabilistic choice itself that the
machine learning component performs and thus can-
not be eliminated, and the epistemic (or systematic)
uncertainty, which is caused by the lack of knowledge
of the model itself which can be reduced (Kiureghian
and Ditlevsen, 2009).
Using a closed-set classification process as an ex-
ample, where the ML model has to assign its input
to a suitable class that describes it, even a perfectly
calibrated ML model with a very high detection rate
would generate wrong results whenever facing out-
of-distribution (OOD) inputs in production, despite
the high performance achieved on the known sample
distributions. The difficulty in detecting OOD cases
depends on how much the outliers are similar to the
known classes (Fort et al., 2021).
The quality of ML components can be evaluated
50
Bedini, F., Jungebloud, T., Maschotta, R. and Zimmermann, A.
An Analysis and Simulation Framework for Systems with Classification Components.
DOI: 10.5220/0012357000003645
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 12th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2024), pages 50-61
ISBN: 978-989-758-682-8; ISSN: 2184-4348
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

thanks to different performance measures, each of
which should be carefully evaluated depending on the
use case (Flach, 2019). For classification models, a
confusion matrix presents a tabular representation of
the model’s predictions against the actual class labels.
It provides insights into true positives (TPs), true neg-
atives (TNs), false positives (FPs), and false nega-
tives (FNs), allowing to calculate metrics like accu-
racy, precision, recall, and F1-score. These metrics
help understand the model’s performance for differ-
ent classes and identify areas of improvement.
1.1 Contribution
As black-box components are inherently hard to ver-
ify (Tappler et al., 2021) and industrial processes
rely on minimum qualitative standards that need to
be assured, the system-level effects of ML compo-
nents should be computable during the design phase.
One typical application is to decide about engineer-
ing trade-offs, such as between high accuracy and ef-
ficient learning.
An integrated development environment (IDE)
shall allow the creation of system models using both a
graphical drag-and-drop interface and a textual nota-
tion, as the first one is better suited for displaying re-
lationships between elements (Wile, 2004), whereas a
textual representation simplifies inputting fine details
and properties.
In order to provide a solid base for the analy-
sis methods that will be defined in the framework, a
model-driven engineering (MDE) approach was fol-
lowed; the model semantics shall be easily under-
standable by the end-users but also have a precise se-
mantics to allow analyzing and simulating the model
instances in an unambiguous way. This was made
possible thanks to a transformation between the mod-
els and Stochastic colored Petri nets (SCPNs), which
describe the execution semantics of the domain-
specific language (DSL) with a token game.
With the proposed framework, we aim to provide
an easy-to-use model-based analysis and simulation
environment that supports domain experts in model-
ing and designing data flows within systems’ com-
ponents. The contribution of this work is its holis-
tic approach that leads to a complete start-to-end sys-
tem analysis that considers the possible interactions
between different components instead of focusing on
the performance of single components.
This paper will focus on providing a high-level
overview of the entire analysis and simulation frame-
work for designing and validating systems that con-
tain components that may deliver uncertain outputs.
It describes the framework’s entire flow and the main
conceptual points of the defined DSL, focusing on the
preliminary results of the analysis of simple systems.
The remainder of this paper is structured as fol-
lows: Section 2 explores related works and pro-
vides background knowledge about modeling meth-
ods. Section 3 shows the framework’s big picture
and structure, whereas Section 4 shows the defini-
tion of the DSL. Section 5 gives further details about
the analysis opportunities on the defined models, and
Section 6 gives a short overview of the framework’s
technical realization. In conclusion, Section 7 shows
an application example, and Section 8 summarizes the
work and contains an outlook and ideas for future de-
velopments.
2 BACKGROUND
There are plenty of studies where AI gets applied
to software engineering methods (Zhang and Tsai,
2003), but only a few about applying a software en-
gineering methodology to analyze ML specifically at
the product or runtime application levels of the AI in
Software Engineering application levels (AI-SEAL)
taxonomy (Feldt et al., 2018), as in this work.
A different class of studies discusses applying an
engineering method to create machine learning mod-
els. For example, (Amershi et al., 2019) focuses on
the importance of applying a data-oriented engineer-
ing approach and defines a 9-step workflow after ana-
lyzing how software teams work with AI in Microsoft.
Traditional systems engineering approaches
worked well in the assumption that the processes
were almost deterministic (Pennock and Wade,
2015), whereas machine learning components are
probabilistic, meaning that they make predictions
based on statistical patterns observed in the training
data.
Publications related to the uncertainties caused by
ML, particularly about the importance and difficulty
of distinguishing aleatoric and epistemic uncertain-
ties, can be found in (H
¨
ullermeier and Waegeman,
2021).
Regarding supervised ML, the labeled data avail-
able during training usually gets divided into three
sets: the training data, the validation data, and the test
data set (Suthaharan, 2016). Whereas the first two
are actively used during the training process, the lat-
ter is the one used to compute performance measures
by evaluating the resulting model on fresh data it did
not see before.
How this data gets split between these three sets
may cause different classification results and differ-
ent values of the performance measures. Cross-
An Analysis and Simulation Framework for Systems with Classification Components
51
validation (Jiang et al., 2020) helps to assess the
model’s performance on unseen data and provides an
estimate of its generalization capability. A good bal-
ance between training and test sets is required (Xu and
Goodacre, 2018) to achieve a stable estimation of the
performance measures.
To the best of our knowledge, we are not aware
of comparable works about proposing a DSL able to
model a system containing ML-based classification
components and analyze it in a holistic way. Graph-
ical editors that allow modeling ML elements such
as KNIME (O’Hagan and Kell, 2015) or AI dedi-
cated editors such as Artificial Intelligence Manage-
ment Software (AIMS) from AI-UI (AI-UI GmbH,
2022) do exist, but they also come with a fixed seman-
tics which can not be changed. They are also more
focused on allowing users to actually use the machine
learning models rather than analyzing them.
Regarding the modeling possibilities available,
discrete-event models such as Petri nets (PNs) are
helpful for analyzing and simulating stochastic con-
current processes and systems, but lack readability by
systems designers and require specific knowledge to
use them. For this reason, a common approach con-
sists of using another kind of model that is simpler
to understand and whose semantics can be translated
automatically to a Petri net, such as in (Huang et al.,
2019), where Systems Modeling Language (SysML)
activity diagrams get verified after a transformation to
a PN.
These other models can either be known general-
purpose models such as Unified Modeling Language
(UML) or SysML, or a specific modeling language
designed for the specific purpose. For a language to
be fully specified, a definition of its semantics is re-
quired. We define our DSL’s precise semantics using
SCPNs directly, which is also the reason why General
Purpose Languages (GPLs) like UML or SysML has
not been used, in order to avoid confusion in its inter-
pretation in the case a different semantics needed to
be specified.
DSLs allow expressing domain knowledge con-
cretely, with direct involvement of the domain experts
with a modest implementation cost (Spinellis, 2001).
However, the literature shows that there is a gener-
alized lack of adoption of DSLs for various reasons,
for example related to social reluctance due to per-
ceived risks related to the DSL’s maintainability and
evolution (Tomassetti and Zaytsev, 2020) or such as
the lack of a simple formalized way to define a DSL
execution semantics (Bucchiarone et al., 2020).
Considering the implementation trade-offs listed
in (Mernik et al., 2005), and thanks to the improve-
ments in the ease of DSLs implementation due to
better tools, models, and languages than those avail-
able in 2005, realizing a DSL instead of expanding
generic modeling languages seems reasonable and is
supported by (Bonnet et al., 2016), where is acknowl-
edged that multi-purpose modeling languages such as
the UML for software and the SysML for systems are
not always the best option for implementing a model-
based systems engineering (MBSE) solution.
3 THE FRAMEWORK’S FLOW
This section provides a big-picture overview of the
operations that are supported by the framework and
how they are connected together.
User
Edit the
model
P1
E4SM model
instance
T
Store the model
P2
.e4sm
xml file
D
.e4smcode
D
MMT transformation
to SCPN
P5
SCPN
D
Direct
analysis
P4
Analysis
results
D
M2T transformation
P3
HTML
documentation
D
Indirect
analysis
P6
TimeNET
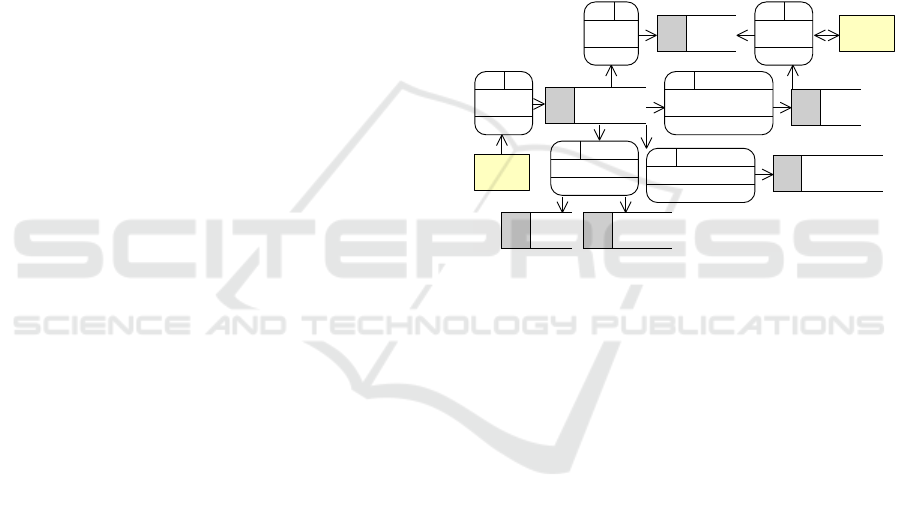
Figure 1: A data flow diagram depicting the main flows in-
side the framework. The yellow User and the simulation
software TimeNET are external entities. T depicts transient
data and D persistent data.
Our framework supports various operations, as
shown in Figure 1. The central object, which is used
by all activities, is the Engineering for Smart Manu-
facturing (E4SM) Model, an instance of our DSL.
The user can edit models (P1) either graphically
or textually as code. Models can then either be saved
as an XML file or as our specified code with the ex-
tension e4smcode (P2).
Both editors support a static model validation that
checks, for instance, that all cardinalities are met and
all defined model constraints are respected (e.g., no
dangling edges are present in the model).
It is then possible to utilize the modeled system,
for example, by transforming it into other kinds of
models or documents. As a proof of concept, a gener-
ation of HTML-based model documentation through
a model-to-text (M2T) transformation has been im-
plemented (P3).
Once the system has been modeled, it is possible
to run two kinds of analysis, either direct ones straight
on the model instances (P4) or indirect ones against
a SCPN which gets generated by a model-to-model
transformation (MMT) (P5). In the second case, the
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
52
SCPN gets simulated thanks to an external software
called TimeNET (Zimmermann, 2008).
4 DSL DEFINITION
DSLs get written to provide a higher, more convenient
abstract conceptual level to users who are knowledge-
able in a particular area.
A fully specified DSL consists of an abstract
syntax (the metamodel), the semantics, and at least
one concrete syntax (how the language looks like to
users). To have a precise semantic, we are defining
the semantics of our language with PN logic. In par-
ticular, we are using SCPNs (Zimmermann, 2012), to
support different kinds of tokens and give us the op-
portunity to have different channels for data and con-
trol flows.
In order to allow the final users to follow a top-
down or bottom-up design process, our DSL will al-
low specifying its elements hierarchically. Although
this will not eliminate any complexity, it will allow
making diagrams more comprehensible by hiding the
complexity of a single component in a further layer.
4.1 The Abstract Syntax
Component
Software Component
PhysicalComponent
Sensor
Actuator
Heuristic
Machine Learning Component
Function
External Dependency
Binary Classification Component
Multiclass Classification Component
Classification Component
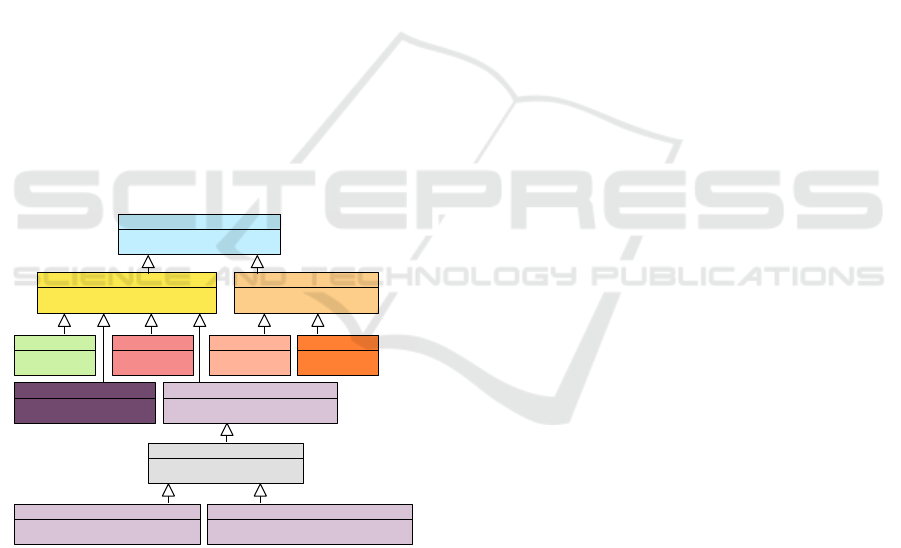
Figure 2: A UML class diagram showing the components
hierarchy, without their attributes and operations. The color
palette used is the same that is used for the corresponding
model elements on the graphical editor.
Due to space constraints, only the most important and
specific parts of the abstract syntax will be shown in
this work as Ecore class diagrams. In Figure 3, the
classes describing the most important structural ele-
ments are shown. A Model is the root element of our
DSL and holds all global elements, such as the ac-
tors, the variants, type specification, and other model
imports. Models contain Packages, which are equiv-
alent to folders containing elements that are related to
each other. Packages can be contained recursively by
other packages. Though it is not a compulsory choice,
a package usually corresponds to a diagram. Inside
packages, Sectors can be used to group components
that belong together, either for their physical location
or just conceptually. Sectors do not add any seman-
tical meaning and have no influence on the system’s
execution.
The more used and central element type is the
Component. There are nine different types of compo-
nents, divided into two categories, software and phys-
ical components, as shown on the class diagram on
Figure 2. Components can contain other components,
or can be defined hierarchically by another package,
in order to allow less cluttered high-level views sup-
porting a top-down approach.
Software components may, of course, not contain
physical components. Such restrictions are defined by
constraints, which will be checked during model val-
idation and are also enforced by the graphical model
editor.
A generic placeholder component type is also
available to allow designing a system without need-
ing to know how each element will be realized in the
final design.
As the DSL can also be used to distribute and
manage the work of different people, it is possible
to assign a Person (subclass of Actor) as main-
Responsible of a given component.
Components can have input and output pins,
which get connected by directed Connectors, which
can also be specified further as logical connectors or
physical connectors. Different kinds of components
allow for storing different information in the model.
For example, software components allow specify-
ing a degree of concurrency (number of servers) and
whether the execution is synchronous or not. The
same applies to connectors.
Physical connectors represent physical cables,
tracks on printed circuit boards, or wireless connec-
tions between physical components, whereas logi-
cal connectors represent data flows exchanged within
physical components as packages. Similar to the
generic components, generic connectors are also
available and can be used as temporary placeholders
while designing a system at its early stages.
DataNodes are elements that can store data pack-
ages. Pins define the interface of components,
whereas DataStores can hold data indefinitely once
they receive it. When newer data is provided, it re-
places the former value.
Figure 4 shows the metamodel’s package structure
and the dependencies between them. Five packages
An Analysis and Simulation Framework for Systems with Classification Components
53
[0..*] sectors
[0..*] components
[0..*] components
[0..*] packages
[0..*] components
[0..*] sectors
[0..*] packages
[0..1] specifiesComponent
[0..1] specifiedInPackage
[0..*] datastores
[0..*] datastores
[0..*] datastores
[0..*] connectors
[1..1] source
[1..1] target
[0..*] pins
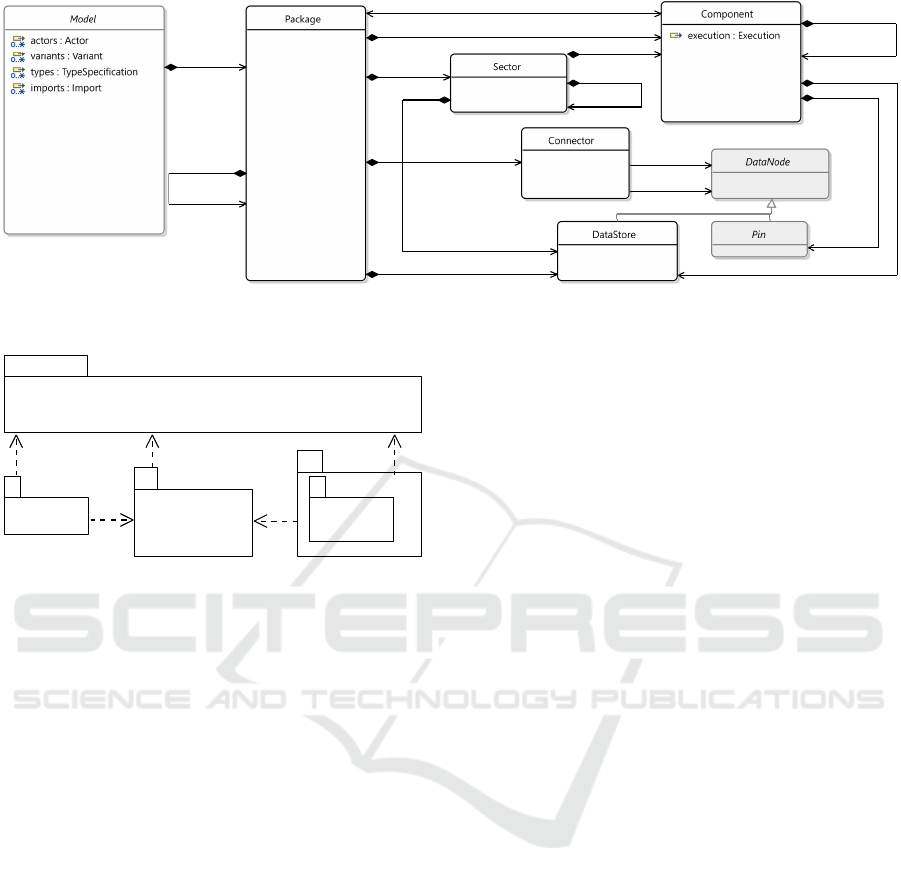
Figure 3: An Eclipse Modeling Framework core meta model (Ecore) class diagram showing a small extract of the abstract
syntax.
E4SM
Core
Execution
Analysis
Results
Figure 4: A UML package diagram showing the package
hierarchy and dependencies.
have been defined, which can be described as follows:
Core: this core package contains the fundamental el-
ements which are required by most of the other
packages, such as the data types and basic ele-
ments such as Element and NamedElement;
E4SM: this package is the main package and con-
tains, for example, the specification of the com-
ponents, sectors, and pins;
Execution: this package contains all elements re-
lated to the specification of the components’ ex-
ecution. It allows components to change the rate
of items flowing between input and output pins,
and to change their data type;
Analysis: this package is used to specify elements
that are related to the analysis functions, such as
the definition of Parameters, which can be at-
tached to most of the model’s elements;
Results: subpackage of Analysis, is used to define
how the analysis results are structured and thus
defines the output interface of the analysis tools.
In this way, analysis results can be stored as mod-
els and be analyzed or displayed in a structured
way.
For each package, its namespace corresponds to
a lowercase version of its name. Namespaces are
required for having a unique name resolution in the
Eclipse Modeling Framework (EMF) and various
Eclipse plugins.
4.1.1 Classification Components
For the simulation process to correctly reflect the
behavior of the classification components, the com-
ponents’ performance measures (Diego et al., 2022)
such as accuracy, specificity, and recall are required.
It would be rather easy for the final users to pro-
vide single values such as the accuracy for a given
class i (Equation (1)), which describes how many cor-
rect results (i.e., TPs and TNs) were delivered out of
all inputs. Other measures of observational error re-
quired by the simulation are the recall (Equation (2))
and the specificity (Equation (3)). The recall describes
the ratio between how many times a given class was
detected correctly out of all samples that should have
been detected as positive (i.e., the TPs summed with
the FNs), whereas the specificity, on the other hand,
shows how well the classification component could
correctly classify a negative sample.
For the multiclass classification case, aggregated
measures are available (Grandini et al., 2020), such as
balanced accuracy (Equation (4)), weighted balanced
accuracy (Equation (5)), micro average recall (Equa-
tion (6)), and macro average recall (Equation (7)).
Each of them has different strengths and shall be used
in different cases, depending, for example, on how
balanced the different classes are.
As all of these and other metrics can be easily
computed once the confusion matrix of a classifica-
tion component is available, the DSL supports the de-
scription of binary and multiclass confusion matrices
in order not to restrict which kind of measure can be
used in the analysis phases. The metamodel provides
operations that can compute the most used measures
out of the box.
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
54

For a given class i:
accuracy
i
=
T P
i
+ T N
i
T P
i
+ FP
i
+ T N
i
+ FN
i
(1)
recall
i
=
T P
i
T P
i
+ FN
i
(2)
speci f icity
i
=
T N
i
T N
i
+ FP
i
(3)
For I classes, where w
i
describes the frequency of
the class i and W is the sum of all weights:
balAccuracy =
∑
I
i=0
recall
i
I
(4)
weiBalAccuracy =
∑
I
i=1
T P
i
(T P
i
+FN
i
)·w
i
I ·W
(5)
microRecall =
∑
I
i=0
T P
i
∑
I
i=0
(T P
i
+ FN
i
)
(6)
macroRecall =
∑
I
i=0
recall
i
I
(7)
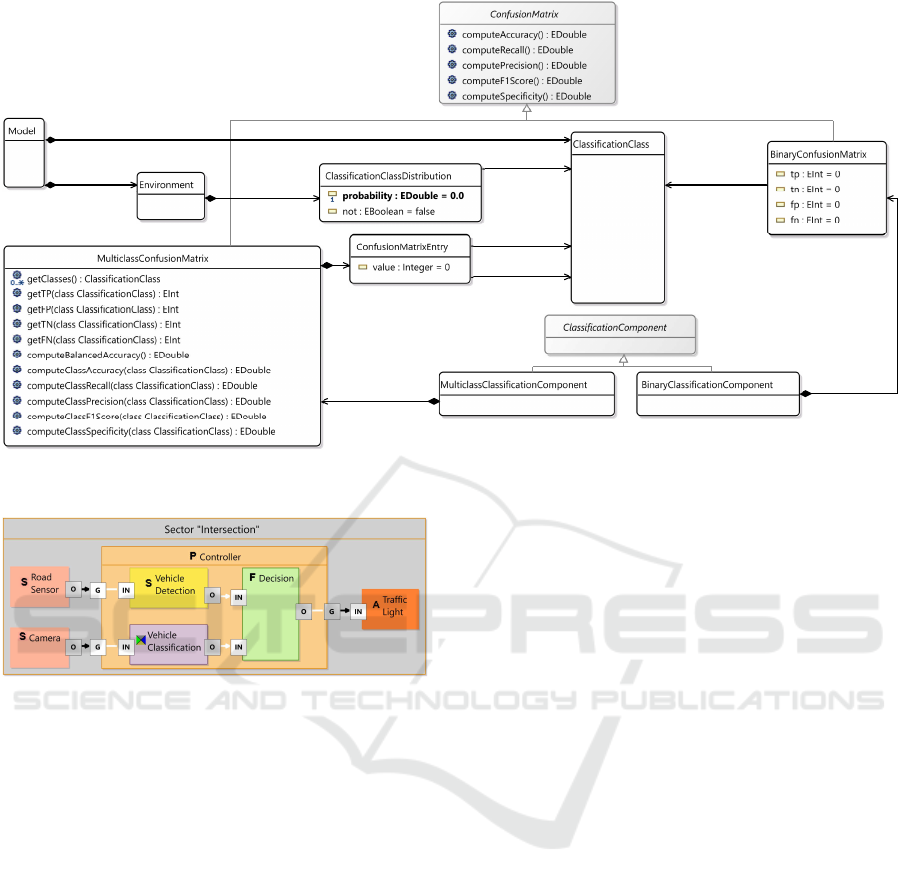
Figure 5 shows the abstract syntax of the binary
classification components, with a selection of the
most important attributes and operations.
We support two kinds of confusion matrices
(Binary- and Multiclass-ConfusionMatrix) and
the two respective types of classification components,
which can hold multiple confusion matrices of the
appropriate type. Though classification components
only have one confusion matrix in reality, multiple
matrices are supported in order to allow comparing
different variants during the simulation.
Inside Models, it is possible to specify
Environments which define how likely it is for the
systems’ sensors to detect a given Classification-
Class. This will be useful during the simulation to
test the component against situations where classes
have a different balance. Sensors can define what
classes they detect, and the confusion matrices define
what classes are detectable by the classification
components.
4.2 The Concrete Syntax
Two concrete syntaxes have been defined for this
DSL, a graphical concrete syntax and a textual con-
crete syntax.
4.2.1 The Graphical Concrete Syntax
The graphical concrete syntax is particularly useful
when modeling the system structure, the containment
relations of the components, and the connections be-
tween them. In order to lower the barrier for do-
main experts who would need to learn a completely
new concrete syntax, it is preferred to adopt existing
notations as much as possible (Karsai et al., 2014).
For this reason, our graphical notation is inspired by
UML’s component and activity diagrams.
Components are represented by rectangles, which
can contain squares on their edges denoting their in-
put (white, with an IN), output (gray, with an O), or
gateway (white or gray, with a G) pins. Gateway pins
connect a component to one of its internal compo-
nents, or vice-versa. Pins are connected by physi-
cal connectors (black arrows) between physical com-
ponents, or logical connectors (white arrows) within
components. Each component type has a different
color, and the initial of the type or an icon (for clas-
sification components) is displayed together with the
component’s name.
Sectors are logical or physical sections for com-
ponents. They are drawn as gray rectangles around
a set of components. Components can also act like
containers, as soon as they contain other components
which specify their internal structure or behavior.
Figure 6 shows a valid diagram depicting a pos-
sible modeling of a smart traffic light with ML-based
vehicle classification.
4.2.2 The Textual Concrete Syntax
model Example {
package Main {
p h ysi c a l C o nne c t o r con ” S1 . s en . s e n o u t ”
−> ” S1 . a c t . a c t i n ”
s e c t o r S1 {
components {
s e n s o r s e n {
doc : ”A d e s c r i p t i o n ”
t a k e s Det ( 3 3 )
ou t MyType s e n o u t
} ,
a c t u a t o r a c t {
i n MyType a c t i n
}
} } } }
Listing 1: An e4smcode example.
As the graphical concrete syntax would get too
cluttered to display model elements and attributes
graphically, the textual concrete syntax allows
expressing details (for example, about the internal
execution of the components) in a more concise and
An Analysis and Simulation Framework for Systems with Classification Components
55
[0..*] confusionMatrixes
[0..*] confusionMatrixes
[0..*] entries
[0..*] environments
[0..*] classificationClasses
[1..1] predicted
[1..1] truth
[1..1] positiveClass
[0..*] classificationClasses
[1..1] classificationClass
Figure 5: An Ecore diagram showing the abstract syntax related to the different kinds of classification components, confusion
matrices and the environment definition.
Figure 6: An example of a valid diagram with components
of different types contained in one sector. Black arrows de-
pict physical connectors, and white arrows represent logical
connectors.
practical way. The syntax is JSON-like and consists
in blocks that define elements, with the following
structure:
<elementType> <name > {< attribut e s and
chi ldre n >}
Whereas connectors are described with:
<connectorType> <name > " s o u rce " -> "
targ e t " where “source” and “target” are names-
paced and scoped strings leading to a model element
by its name, which corresponds to its ID. Double
quotes must surround names containing spaces.
Listing 1 shows a simple example of a sensor in-
side a sector directly connected to an actuator by a
physical connector. Here, it is possible to specify de-
tails that are not directly visible on the diagrams, such
as element descriptions, pin data types, or how often
a sensor executes.
4.3 The Semantics
Our DSL has a well-defined execution semantics, as
defined in (Mernik et al., 2005), specified solely by a
SCPN transformation. For this reason, our DSL can
also be seen as a high-level SCPN.
Showing the entire SCPN bijection specification
formally for each structural metamodel element will
be out of scope for this paper and will be explained
in detail in an upcoming dedicated publication. Here,
only an informal description of the semantics is pro-
vided.
Components receive input and generate output to-
kens through their interface, which is defined by their
pins. By default, each input pin awaits for an input
token, and each output pin generates an output token.
Optionally, input pins can collect multiple tokens, and
output pins can generate more than an output token.
A component starts its execution when each input pin
receives the set amount of tokens, but it is possible
to specify an or execution logic when a component
execution starts as soon as one input receives data.
As it is possible to connect multiple connectors to
one pin, each pin is allowed to specify what should
happen to the data when it is connected to multiple
connectors.
FCFS: First come, first served; when multiple output
connectors from a pin are available, only one will
receive the data.
Duplicate: the data token gets duplicated and sent to
all the outgoing connectors concurrently.
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
56

Merge: when multiple input connectors reach a pin,
the data are collected together and merged into a
single data token.
Merge and Duplicate: when a pin has both multiple
input and outgoing connectors (e.g., in Gateway
pins), both merge and duplicate can be enabled.
Sensors, Actuators, and Classification compo-
nents behave differently than all others. Sensors can
specify what kind of data they generate and with
which frequency, using different time distribution
functions. Actuators can only have input pins, and
they consume the tokens they receive, taking them out
of the system. Classification components, thanks to
the information available through the confusion ma-
trix, behave as gray boxes. The way they get to exe-
cute is the same as all other components, but they ad-
ditionally classify the received class to one of its four
possible outcomes (TP, TN, FP, FN) based on metrics
derived from the confusion matrix.
5 ANALYSIS OPTIONS
After the model has been defined, it is possible to
perform two kinds of analysis. Either directly on
the EMF model instances (Section 6.1) or by ana-
lyzing/simulating the SCPN resulting from the MMT
(Section 6.2).
With the component defined in the Analysis and
Analysis Results packages, it is possible to define
analysis tools to compute any parameter of interest. In
this project, we aim to compute the following prop-
erties by running direct analyses on the EMF model
instance:
Execution Time: of particular interest in the case of
real-time systems with hard deadlines.
Network Usage: in order to assure that the planned
physical connections between components have
the necessary capacity to support their maximum
traffic.
Errors Propagation: due to the uncertainties which
are intrinsic to the ML components or heuristics,
a simulation about their propagation in the system
is necessary.
Thanks to the classes Parameter and
ParameterDefinition, it is possible to define
and assign a parameter to almost any model element
to arbitrarily extend the attributes that can be stored
in our model. These can then be defined and queried
by the analysis framework to support new kinds of
analysis.
6 IMPLEMENTATION
Our DSL has been implemented using Eclipse Mod-
eling Tools IDE, extended with Eclipse Sirius (Obeo,
2022b). A viable alternative would have been the
Meta Programming System (MPS) from JetBrains,
but Eclipse currently has more customizable graphical
editors and has a better holistic approach to support all
required model editors, MMT and M2Ts transforma-
tions.
The metamodel has been realized with the EMF
as a set of ecore files (one per package). The
EMF (Steinberg et al., 2008) is a well-known open-
source toolkit for developing DSLs (Gronback, 2009)
and allows to easily generate a default customizable
tree editor, which stores, by default, model instances
in an XML format. In order to support a more
comprehensible textual syntax, we used Xtext (The
Eclipse Foundation, 2022b; Bettini, 2016). Xtext au-
tomatically generates from a definition file an ANTLr
grammar (Parr and Quong, 1995), a textual editor
with plenty of useful features, such as auto-complete
with model elements scoping, syntax checking, and
model validation with visual feedback directly on the
code.
Regarding the graphical editor, we have defined a
Sirius viewpoint specification project, which allows
the final users to create different kinds of representa-
tion:
Data Transfer Diagrams (DTD): are the main dia-
gram of this DSL and allow displaying the flow
of data between components. Different layers are
available to allow different editing modes, such
as: Generic Elements to highlight elements that
have not been fully specified yet; Responsibilities
to highlight elements that do not have a main re-
sponsible or show the responsible person of com-
ponents who have it; Slow flows to colorize the
connectors in a different shade depending on their
capacity; Missing Types highlights pin without a
specified type.
Component Specification Diagrams (CSD): is
a diagram that allows specifying the internal
execution of a component within its input and
output pins.
Class Diagrams (CD): inspired from the UML class
diagram, it allows defining domain-specific data
types and their relationships (inheritance and con-
tainment).
Person Management Table (PMT): is a table that
allows to easily edit all persons available in the
model and see all their responsibilities.
An Analysis and Simulation Framework for Systems with Classification Components
57
Documentation Table (DOCT): is a table that al-
lows documenting the elements of the model. El-
ements that are missing a documentation text get
highlighted in this view.
Thanks to a M2T transformation realized with Ac-
celeo (Obeo, 2022a), it is possible to generate a web-
site listing all documentation annotations available in
the model, where all related elements are linked.
6.1 Direct Analyses
Direct analysis methods can be specified program-
matically as Java applications that use the interfaces
provided by our analysis package and the generated
EMF model interface. Direct analyses must be pro-
grammed manually and have complete access over all
attributes and the structure defined in the EMF model
instance.
Analyses methods can be easily started from
within the Eclipse application, directly from the di-
agram’s context menu.
Currently, the analysis framework has been imple-
mented at a proof of concept level. It is possible to run
a simple execution time analysis that computes a path
between components and the required execution time
between these as a base for a more advanced deadline
analysis, which can be relevant for real-time systems.
6.2 The Model to Model
Transformation
To show a simple example of the transformation, we
introduce a small model (Figure 7).
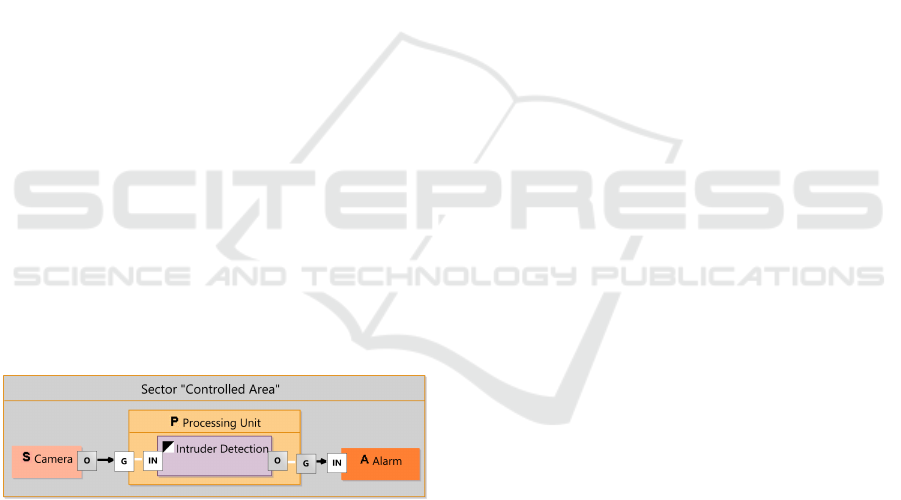
Figure 7: A simple model with a camera (input sensor),
a binary classification component that can detect intruders,
and an alarm (actuator).
A camera with a fixed framerate is connected to
a physical processing unit, which contains software
that can detect intruders on the frame through binary
classification. The processing unit can send a signal
to an alarm system when needed.
Parsing the XML schema definition file (XSD),
which specifies the structure of a valid SCPN, it was
possible to infer a metamodel that could be used as a
starting point to define a valid EMF model.
Using that metamodel as the target, a MMT has
been defined in order to translate the model seman-
tic and execution logic to a valid, equivalent SCPN.
The transformation has been implemented with the
tool Eclipse QVT Operational (QVTo) (The Eclipse
Foundation, 2022a), which is fully integrated with the
Eclipse platform and can be started directly from the
Sirius editor.
The transformation automatically adds measures
for recording how many tokens are generated by sen-
sor nodes and how many tokens reach actuators to
support input/output analysis directly. When classi-
fication components are present, additional measures
for all their possible outcomes are also generated.
These will be used to compute the simulated perfor-
mance measures.
The simulation of the resulting SCPN aims to
evaluate how the classification components behave
when the environment changes, for example, regard-
ing multiclass classifiers, allowing to provide a cer-
tain percentage of OOD samples which will always
be classified wrong, as the model was not trained on
it. Another option would be to try out a different dis-
tribution of classes to see if it would perform better or
worse if located in a different environment.
After the transformation, a small JavaScript appli-
cation that can be run locally with the cross-platform
runtime environment Node.js can be used to sim-
plify the resulting SCPN. This is done by removing
all superfluous immediate transitions (Recalde et al.,
2006), which just transfer tokens without modifying
them, as they would not contribute to the PN reach-
ability graph and can be removed without affecting
analysis or simulation results.
As the layout information cannot be easily trans-
ferred between the original EMF model and the
SCPN, as the output model has plenty elements more
than the original one and the size of the input ele-
ments varies vastly whereas the PN elements are ho-
mogeneous and small, the generated PN elements do
not contain any information regarding their graphical
distribution on the canvas. TimeNET comes with a
functionality that allows to automatically layout the
diagram elements using different Eclipse layout ker-
nel (ELK) algorithms. The ELK layered is the one
that usually works best for our kind of net.
Figure 8 shows the result of the automatic trans-
formation process of the model shown in Figure 7,
after the automatic simplification and layout process
(manually adjusted for this publication). After the to-
ken gets initialized, it gets sent to the Intruder detec-
tion component. There, it will be picked through local
guards on the transitions if the sample belongs to the
Truth Class or not. If it belongs to the truth class,
the simulation will decide if it results in a TP or a FN
outcome, depending on the recall computed from the
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
58
1
cl_intruder (bool)
2
3
4
5
TP
FN
FP
TN
Figure 8: The simplified SCPN resulting from the MMT transformation of the model in Figure 7. 1 shows the data structure.
In 2, the data initialization is performed (in this case, it is set whether a class was detected or not). 3 shows the possibility of
limiting the execution of the components or simulating multi-core components via automatically generated semaphores. In
4, the performance-measures-based classification results are drawn, and 5 shows the generated measures that will record the
four possible outcomes.
provided confusion matrix. On the other hand, if the
sample belongs to the other class, it can only come
out as a TN or a FP sample. This decision is taken
based on the model specificity.
The transformation has been validated through the
transformation of simple test cases, which led to the
expected results and their integration into progres-
sively larger models. A larger example of the transfor-
mation and simulation of a data stream pipeline can be
found in (R
¨
ath et al., 2023). This work shows that a
pipeline can be modeled using our DSL, and the sim-
ulation of the automatically generated SCPN delivers
measures that match the real execution.
7 AN APPLICATION EXAMPLE
This section aims to provide an example of the kind
of models that can be realized using the framework,
considering that the resulting model needs to be small
enough to still be explainable and comprehensible
with the small graphics that can be placed on a scien-
tific paper, in particular with regards to the resulting
PN which naturally has a higher number of elements
than the original DSL model.
As an industrial example, we have used the sce-
nario described in the work of (Walther et al., 2022).
In that paper, a deep learning approach is used to pre-
dict the success of a laser beam butt welding process
of two sheets of high-alloy steel.
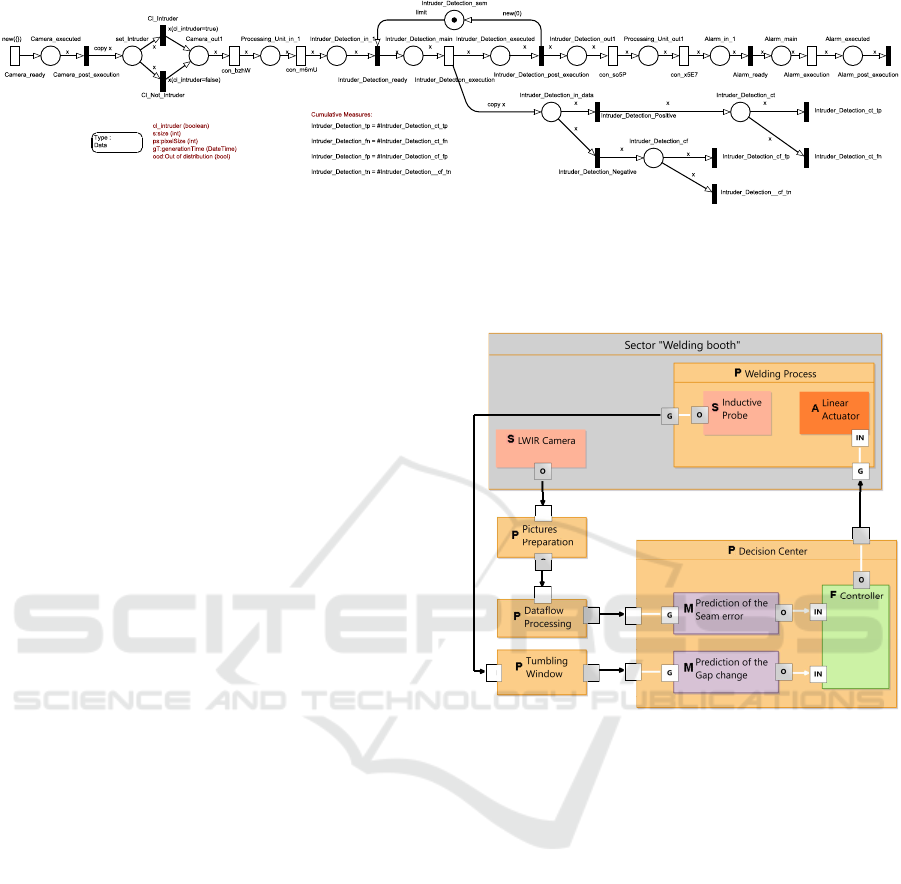
The diagram of the process, modeled using our
DSL, is shown in Figure 9. There are two sensors pro-
ducing data: an infrared camera supervising the weld-
ing process and an inductive probe sensor that mea-
sures how much the two sheets are diverging while
being welded. This data gets prepared and sent to two
different ML components, which will deliver their
prediction results to the controller. If a correction is
required, a signal is sent to the linear actuator, which
will push the two sheets back together with a certain
G
O
G
G
G
IN
O
IN
O
Figure 9: A diagram showing the high-level modeling of
the deep learning-controlled welding process.
strength.
This small model, composed of a total of 14 com-
ponents distributed in different packages, can be au-
tomatically transformed into a SCPN. The generated
SCPN contains 38 places and 38 transitions (30 timed
and 8 immediate) connected by 76 arcs. The simplifi-
cation process allows obtaining an equivalent net that
contains 5 immediate transitions, 5 places, and 10 arcs
less.
The generated PN comes with measures for count-
ing the number of tokens generated by sensors and the
number of tokens consumed by actuators. This allows
performing an input/output response simulation based
on the given stochastic execution time and connection
capacity defined in the model.
An Analysis and Simulation Framework for Systems with Classification Components
59

8 CONCLUSION
In this work, we have shown the design and imple-
mentation of an open-source framework to define and
simulate data flows within hardware-software sys-
tems containing ML components with uncertainties,
with an initial focus on binary classification compo-
nents. The framework revolves around a DSL with
a precise SCPN semantics, which has been imple-
mented on the Eclipse environment (EMF) and in-
cludes an Eclipse Sirius graphical editor and an Xtext-
generated textual editor. The framework has been im-
plemented as a proof-of-concept and provides a start-
ing point for defining different kinds of reusable sim-
ulations and analysis methods.
The presented approach makes it possible to con-
sider classification components with known confu-
sion matrixes as gray boxes. The Petri net-based sim-
ulation process can mimic their behaviors based on
their performance measures computed from their test
data set.
The goodness of the simulation process regard-
ing the classification components is correlated to the
amount and quality of the test data used to produce
the confusion matrices. If one class was poorly rep-
resented during the test phase, the computed perfor-
mance value may not correctly reflect reality.
8.1 Future Work
The upcoming steps include the implementation of
analysis methods for computing the network usage
and the definition of the simulation of the error prop-
agation inside the system. The implementation of a
simulation method for multi-label multiclass classifi-
cation components is also planned, thanks to the work
of (Heydarian et al., 2022) towards the definition of
multi-label confusion matrices (MLCMs).
When the project leading to this work started in
2019, SysML v2 was still unavailable. Retrospec-
tively, it can be said that basing the DSL on Kernel
Modeling Language (KerML) (Jansen et al., 2022)
could provide a more flexible base which more tools
in the future may support. When more mature tools
will be available, it may be worth considering rebas-
ing this DSL on KerML instead of Ecore to improve
its reusability and interoperability with more tools.
ACKNOWLEDGEMENTS
This work has received funding from the Carl Zeiss
Foundation as part of the project Engineering for
Smart Manufacturing (E4SM) under grant agreement
no. P2017-01-005.
REFERENCES
AI-UI GmbH (2022). Artificial intelligence user interface
(AI-UI). https://ai-ui.ai/en. last checked on Oct 2,
2024.
Amershi, S., Begel, A., Bird, C., DeLine, R., Gall, H., Ka-
mar, E., Nagappan, N., Nushi, B., and Zimmermann,
T. (2019). Software engineering for machine learn-
ing: A case study. In 2019 IEEE/ACM 41st Interna-
tional Conference on Software Engineering: Software
Engineering in Practice (ICSE-SEIP), pages 291–300,
New York, NY. IEEE.
Bettini, L. (2016). Implementing domain-specific languages
with Xtext and Xtend. Packt Publishing Ltd, Birming-
ham, United Kingdom.
Bonnet, S., Voirin, J.-L., Exertier, D., and Normand, V.
(2016). Not (strictly) relying on SysML for MBSE:
Language, tooling and development perspectives: The
Arcadia/Capella rationale. In 2016 Annual IEEE Sys-
tems Conference (SysCon), pages 1–6, Orlando, FL,
USA. IEEE.
Bucchiarone, A., Cabot, J., Paige, R. F., and Pierantonio, A.
(2020). Grand challenges in model-driven engineer-
ing: an analysis of the state of the research. Software
and Systems Modeling, 19(1):5–13.
Diego, I. M. D., Redondo, A. R., Fern
´
andez, R. R., Navarro,
J., and Moguerza, J. M. (2022). General perfor-
mance score for classification problems. Applied In-
telligence, 52(10):12049–12063.
Feldt, R., de Oliveira Neto, F. G., and Torkar, R. (2018).
Ways of applying artificial intelligence in software en-
gineering.
Flach, P. (2019). Performance evaluation in machine learn-
ing: The good, the bad, the ugly, and the way forward.
Proceedings of the AAAI Conference on Artificial In-
telligence, 33(01):9808–9814.
Fort, S., Ren, J., and Lakshminarayanan, B. (2021). Ex-
ploring the limits of out-of-distribution detection. In
Ranzato, M., Beygelzimer, A., Dauphin, Y., Liang, P.,
and Vaughan, J. W., editors, Advances in Neural Infor-
mation Processing Systems, volume 34, pages 7068–
7081, Red Hook, NY, USA. Curran Associates, Inc.
Grandini, M., Bagli, E., and Visani, G. (2020). Metrics for
multi-class classification: an overview.
Gronback, R. C. (2009). Eclipse modeling project: a
domain-specific language (DSL) toolkit. Pearson Ed-
ucation, London, United Kingdom.
Heydarian, M., Doyle, T. E., and Samavi, R. (2022).
Mlcm: Multi-label confusion matrix. IEEE Access,
10:19083–19095.
Huang, E., McGinnis, L. F., and Mitchell, S. W. (2019).
Verifying SysML activity diagrams using formal
transformation to Petri nets. Systems Engineering,
23(1):118–135.
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
60

H
¨
ullermeier, E. and Waegeman, W. (2021). Aleatoric and
epistemic uncertainty in machine learning: an intro-
duction to concepts and methods. Machine Learning,
110(3):457–506.
Jansen, N., Pfeiffer, J., Rumpe, B., Schmalzing, D., and
Wortmann, A. (2022). The language of SysML v2
under the magnifying glass. The Journal of Object
Technology, 21(3):3:1.
Jiang, T., Gradus, J. L., and Rosellini, A. J. (2020). Su-
pervised machine learning: A brief primer. Behavior
Therapy, 51(5):675–687.
Jiao, L. and Zhao, J. (2019). A survey on the new generation
of deep learning in image processing. IEEE Access,
7:172231–172263.
Karsai, G., Krahn, H., Pinkernell, C., Rumpe, B., Schindler,
M., and V
¨
olkel, S. (2014). Design guidelines for do-
main specific languages.
Kiureghian, A. D. and Ditlevsen, O. (2009). Aleatory
or epistemic? does it matter? Structural Safety,
31(2):105–112.
Liang, W., Tadesse, G. A., Ho, D., Fei-Fei, L., Zaharia, M.,
Zhang, C., and Zou, J. (2022). Advances, challenges
and opportunities in creating data for trustworthy ai.
Nature Machine Intelligence, 4(8):669–677.
Maletic, J. I. and Marcus, A. (2005). Data cleansing. Data
mining and knowledge discovery handbook, pages 21–
36.
Mernik, M., Heering, J., and Sloane, A. M. (2005). When
and how to develop domain-specific languages. ACM
Computing Surveys, 37(4):316–344.
Nassif, A. B., Shahin, I., Attili, I., Azzeh, M., and Shaalan,
K. (2019). Speech recognition using deep neural net-
works: A systematic review. IEEE Access, 7:19143–
19165.
Obeo (2022a). Acceleo. https://www.eclipse.org/acceleo.
last checked on Oct 2, 2024.
Obeo (2022b). Eclipse sirius. https://www.eclipse.org/
sirius. last checked on Oct 2, 2024.
O’Hagan, S. and Kell, D. B. (2015). Software review: the
KNIME workflow environment and its applications in
genetic programming and machine learning. Genetic
Programming and Evolvable Machines, 16(3):387–
391.
Pak, M. and Kim, S. (2017). A review of deep learning in
image recognition. In 2017 4th International Confer-
ence on Computer Applications and Information Pro-
cessing Technology (CAIPT), pages 1–3, Kuta Bali,
Indonesia. IEEE.
Parr, T. J. and Quong, R. W. (1995). ANTLR: A predicated-
LL (k) parser generator. Software: Practice and Ex-
perience, 25(7):789–810.
Pennock, M. J. and Wade, J. P. (2015). The top 10 illusions
of systems engineering: A research agenda. Procedia
Computer Science, 44:147–154. 2015 Conference on
Systems Engineering Research.
R
¨
ath, T., Bedini, F., Sattler, K.-U., and Zimmermann, A.
(2023). Interactive performance exploration of stream
processing applications using colored petri nets. In
Proceedings of the 17th ACM International Confer-
ence on Distributed and Event-based Systems, pages
191–194.
Recalde, L., Mahulea, C., and Silva, M. (2006). Improv-
ing analysis and simulation of continuous Petri nets.
In 2006 IEEE International Conference on Automa-
tion Science and Engineering, pages 9–14, Shanghai,
China. IEEE.
Schuller, B. W. (2013). Intelligent Audio Analysis. Springer
Berlin Heidelberg, Heidelberg, Germany.
Shinde, P. P. and Shah, S. (2018). A review of ma-
chine learning and deep learning applications. In
2018 Fourth International Conference on Comput-
ing Communication Control and Automation (IC-
CUBEA), pages 1–6, Pune, India. IEEE.
Spinellis, D. (2001). Notable design patterns for domain-
specific languages. Journal of systems and software,
56(1):91–99.
Steinberg, D., Budinsky, F., Merks, E., and Paternostro, M.
(2008). EMF: eclipse modeling framework. Pearson
Education, London, Great Britain.
Suthaharan, S. (2016). Supervised Learning Algorithms,
pages 183–206. Springer US, Boston, MA.
Tappler, M., Mu
ˇ
skardin, E., Aichernig, B. K., and Pill, I.
(2021). Active model learning of stochastic reactive
systems. In Software Engineering and Formal Meth-
ods, pages 481–500. Springer International Publish-
ing, Cham, Switzerland.
The Eclipse Foundation (2022a). Eclipse QVT opera-
tional. https://projects.eclipse.org/projects/modeling.
mmt.qvt-oml. last checked on Oct 2, 2024.
The Eclipse Foundation (2022b). Xtext. https://www.
eclipse.org/Xtext. last checked on Oct 2, 2024.
Tomassetti, F. and Zaytsev, V. (2020). Reflections on the
lack of adoption of domain specific languages. In
STAF Workshops, pages 85–94.
Walther, D., Schmidt, L., Schricker, K., Junger, C.,
Bergmann, J. P., Notni, G., and M
¨
ader, P. (2022). Au-
tomatic detection and prediction of discontinuities in
laser beam butt welding utilizing deep learning. Jour-
nal of Advanced Joining Processes, 6:100119.
Wile, D. (2004). Lessons learned from real DSL ex-
periments. Science of Computer Programming,
51(3):265–290.
Xu, Y. and Goodacre, R. (2018). On splitting training
and validation set: A comparative study of cross-
validation, bootstrap and systematic sampling for es-
timating the generalization performance of supervised
learning. Journal of Analysis and Testing, 2(3):249–
262.
Zhang, D. and Tsai, J. (2003). Machine learning and
software engineering. Software Quality Journal,
11(2):87–119.
Zimmermann, A. (2008). Stochastic Discrete Event Sys-
tems. Springer Berlin, Heidelberg, Heidelberg, Ger-
many.
Zimmermann, A. (2012). Modeling and evaluation of
stochastic Petri nets with TimeNET 4.1. In 6th In-
ternational ICST Conference on Performance Evalua-
tion Methodologies and Tools, pages 54–63, Cargese,
France. IEEE.
An Analysis and Simulation Framework for Systems with Classification Components
61
