Knowledge Modelling, Strategy Designing, and Agent Engineering for
Reconnaissance Blind Chess
Robin Stöhr
a
, Shuai Wang
b
and Zhisheng Huang
c
Department of Computer Science, Vrije Universiteit Amsterdam, Amsterdam, The Netherlands
Keywords:
Reconnaissance Blind Chess, Knowledge Modelling, Theory of Mind.
Abstract:
Reconnaissance Blind Chess (RBC) is a unique chess variant where players have limited visibility of a 3x3
square in each round. This paper offers a comparative analysis of the performance of extant agents, along with
an assessment of their ability to model their opponents’ knowledge. On the basis of our analytical findings, we
propose novel and efficient sensing and movement strategies. Subsequently, these strategies are tested through
agent-based gameplay. Furthermore, our experimentation extends to the inference of new knowledge through
a strategy based on the Theory of Mind. Collectively, these insights contribute to the selection of the most
promising strategies for the design of our Scorca agent. By the time of the paper’s submission, it occupies the
second position on the global leaderboard for the RBC game. To conclude, we engage in a discussion of the
inherent limitations of the extant agents and offer a glimpse into potential future strategies.
1 INTRODUCTION
Introduced by researchers at the Johns Hopkins Uni-
versity Applied Physics Laboratory (JHU/APL) as a
variant of chess with imperfect information, Recon-
naissance Blind Chess (RBC)
1
engenders a ‘fog of
war’ mechanic: a player is unaware of the opponent’s
pieces’ positions and must “sense” a 3x3 area of the
8x8 board each round to glean information (Newman
et al., 2016). This added complexity of limited knowl-
edge significantly changes the dynamics and strate-
gies of the game. Tournaments of RBC have been
held as part of the Conference on Neural Information
Processing Systems (NeurIPS) conferences in 2019,
2021, and 2022 (Perrotta et al., 2019).
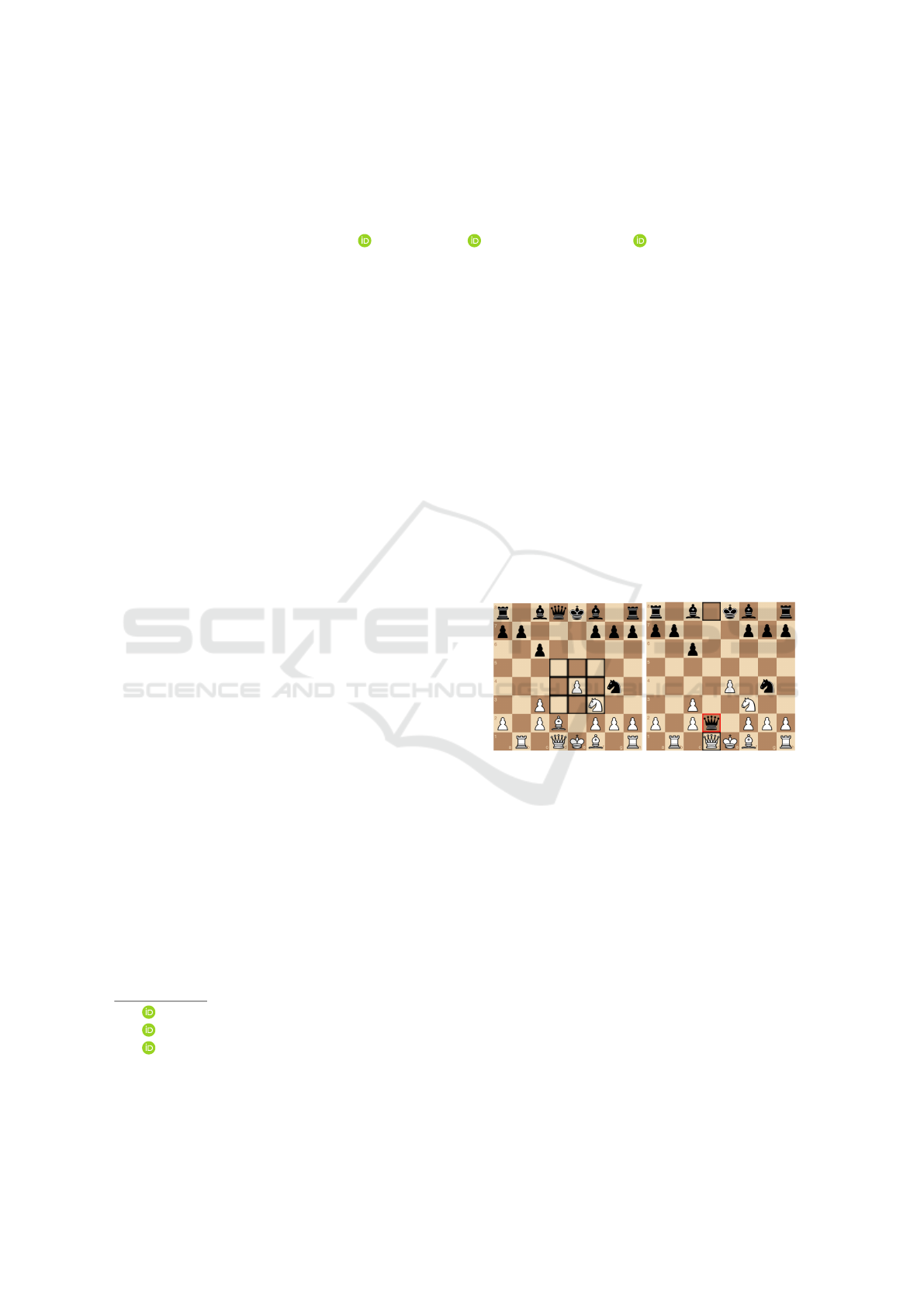
Figure 1 is a real example
2
where the agent play-
ing black gains (true) knowledge in this turn by decid-
ing to sense the 3x3 square highlighted in black. Sub-
sequently, the player attempts to move their queen to
capture the opponent’s white queen, presuming that
there is no obstruction between them. However, this
action is found to be invalid, resulting in the sys-
a
https://orcid.org/0000-0002-2600-6318
b
https://orcid.org/0000-0002-1261-9930
c
https://orcid.org/0000-0003-3794-9829
1
https://rbc.jhuapl.edu/. Detailed rules of the game are
at https://rbc.jhuapl.edu/gameRules.
2
The entire game is online at https://rbc.jhuapl.edu/gam
es/628294.
Figure 1: Example of an interrupted move. Black senses,
and then tries to move the queen d8→d1. But as there is a
bishop on d2, the move stops there and the bishop is cap-
tured.
tem executing a legitimate move. Consequently, an
unanticipated caption occurs. The player is only noti-
fied that the intended move failed, but with something
captured unexpectedly (but not informed what piece)
at some intermediate location. The player is always
aware of the location of its pieces. Unlike other agent
systems, in this game, agents do not communicate di-
rectly. The information passes through the platform
as a notification to the agents.
This example illustrates that accurate modelling
of the opponent’s knowledge (about the position of
the pieces) and an estimate of the player’s strategy
are crucial for the player’s decision of their immedi-
ate next move as well as their strategy towards win-
ning. The RBC game can be used as an alternative
to the Poker game to explore and evaluate the mod-
210
Stöhr, R., Wang, S. and Huang, Z.
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess.
DOI: 10.5220/0012354200003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 210-221
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

elling of knowledge inspired by the Theory of Mind
(ToM). The game platform makes it easy to evaluate
strategies and compare different parametric settings.
The unique mechanics of RBC contribute to a
profound strategic depth that significantly surpasses
traditional chess. The addition of the ‘sensing’ ac-
tion, the incomplete knowledge of the opponent’s
pieces, and the uncertainty introduced by blind cap-
tures result in a complex set of possible states of the
chess board associated with the uncertainty of knowl-
edge that players must navigate. For human players,
this complexity not only requires strategic thinking
but also introduces an element of psychological war-
fare, as players must try to anticipate their opponents’
actions and decisions based on limited information.
This game is not easy for computers either. For a
comparison, classical chess has approximately 10
43
possible states, while RBC has 10
139
possible states,
which indicates that the game can be 10
96
times more
complex (Markowitz et al., 2019).
There has been a substantial amount of research
focused on perfect information games, particularly
chess, which is well-documented in the literature (Apt
and Simon, 2021; Silver et al., 2017). However, the
study of imperfect information games, such as Recon-
naissance Blind Chess, remains relatively unexplored.
The will to fill the gap in our understanding forms
the basis of the following research questions: RQ1.
How can better knowledge modeling benefit the es-
timation of an opponent’s knowledge, which results
in enhanced performance? RQ2. What are the most
effective sensing strategies to diminish the game’s in-
herent uncertainty? Finally, with the understanding
of uncertainty in knowledge acquisition, our third re-
search question is RQ3: What is the most efficient
moving strategy?
Our contributions are the following: (1) We
present a comprehensive analysis of the game, dis-
cussing potential ways to model player knowledge
and manage the expansive state space, amidst preva-
lent uncertainties. (2) We investigate various sens-
ing and moving strategies and evaluate their respec-
tive impacts on agent performance. (3) Based on
our analytical results, we choose the best strategies
for our agent, Scorca
3
, and publish it as an open
source project
4
. The agent ranks second on the global
leaderboard
5
at the time of submission of the article
3
The performance and game records can be found here:
https://rbc.jhuapl.edu/users/48973
4
The code is available on GitHub at https://github.c
om/Robinbux/Scorca with DOI 10.5281/zenodo.10412786.
All the data and supplementary material are on Zenodo with
DOI 10.5281/zenodo.10412840.
5
https://rbc.jhuapl.edu/
(23/10/2023).
The paper is organized as follows. Section 2 pro-
vides recent research on the game. Section 3 explains
knowledge modelling in the RBC game. Section 4
and 5 discuss different sensing and moving strategies,
respectively. Since the rationale for the design of our
Scorca agent is explained in Section 3, 4, and 5 along
with their analysis, we include only a summary of
the strategies chosen with references to the sections
in which the corresponding decisions were made in
Section 6. The evaluation is included in 7, followed
by the discussion in Section 8 and conclusion and fu-
ture work in Section 9.
2 RELATED WORK
A rich landscape of RBC agents have emerged, each
with its uniquestrategy and design during the NeurIPS
tournaments held in 2019 (Gardner et al., ), 2021
(Perrotta et al., 2019), and 2022 (Gardner et al.,
2022). The strategies, algorithms, and methodologies
adopted by these agents have influenced our research.
These agents provide references and benchmarks to
our approach. The following paragraphs give a sum-
mary of these agents and their respective mechanisms
based on the description in the Tournament reports.
StrangeFish
6
maintains an exhaustive set of pos-
sible board states, expanding and filtering based on
game events and private observations. It chooses
sensing actions to maximize the expected impact on
its next move selection. Its moving strategy evaluates
options across the set of boards using a weighted com-
bination of best-case, worst-case, and average out-
come scores calculated with Stockfish
7
(a widely used
chess engine) and RBC-specific heuristics. This ap-
proach of tracking uncertainty while leveraging chess
knowledge allowed StrangeFish to win the inaugural
NeurIPS RBC tournament in 2019 (Gardner et al., ).
StrangeFish2
8
, the successor to StrangeFish, re-
tains its predecessor’s framework for tracking board
states but adds several enhancements. It chooses sens-
ing actions by estimating outcome probabilities for
hypothetical moves after each possible observation.
This results in selecting the sense with the greatest
expected value based on potential move outcomes.
StrangeFish2 also improves efficiency through paral-
lelization and improved search algorithms.
The Fianchetto agent
9
(Taufeeque et al., 2022) is
6
https://rbc.jhuapl.edu/users/713 with code at https:
//github.com/ginop/reconchess-strangefish.
7
https://stockfishchess.org/
8
https://rbc.jhuapl.edu/users/1987
9
https://rbc.jhuapl.edu/users/12368
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess
211

a derivative of StrangeFish’s source code with signif-
icant modifications to the original. It replaced Stock-
fish with the Leela Chess Zero engine (see Section 5.2
for more details) for board evaluation, significantly
accelerating the evaluation process. Fianchetto scores
all potential moves simultaneously, leveraging the ca-
pabilities of a neural network to perform a forward
pass. This amplified efficiency provides the band-
width to expand the search tree, incorporating a prob-
abilistic model that simulates the opponent’s likely
moves. The agent continuously updates its belief sys-
tem of plausible board states at each turn, employing
the POMDP (Partially observable Markov decision
process) belief update equation, creating a dynamic
environment of constant recalibration and adaption
(Taufeeque et al., 2022).
Penumbra
10
, grounded in the principles of deep
synoptic Monte Carlo planning, stands out due to its
ability to maintain a record of all conceivable oppo-
nent board states (Clark, 2021). The agent maintains
a belief state using an unweighted particle filter and
plans its strategy using an upper confidence bound
tree search. Its algorithm uses stochastic abstraction
to create approximations of information states, encod-
ing sets of boards with compact, fixed-size synopses.
This synthesis of data feeds into a deep neural net-
work that informs and guides the search algorithm,
thereby contributing to Penumbra’s unique approach
(Clark, 2021).
The Kevin
11
agent maintains a record of all possi-
ble board states and their associated probability dis-
tribution. When selecting sensing actions, it strives
to minimize the expected difference between its next
move and the optimal move. In addition, it uses
a depth-limited counterfactual regret minimization
(CFR), which approximates an opponent’s Nash equi-
librium strategy.
The Oracle
12
agent employs a meticulous ap-
proach to tracking board states. The agent’s method-
ology involves selecting sensing actions to either
identify potential checks or minimize the expected
number of possible board states. Subsequently, it
selects the move most commonly recommended by
Stockfish across all plausible board states.
The JKU-CODA
13
agent adapt the early AlphaGo
framework (Bertram et al., 2022). It first obtains
a neural network by supervised training, which was
then improved by playing against itself. To tackle
imperfect information, the agent used the history of
observations as input and avoid any attempt to guess
10
https://rbc.jhuapl.edu/simple/users/936
11
https://rbc.jhuapl.edu/simple/users/8822
12
https://rbc.jhuapl.edu/simple/users/2
13
https://rbc.jhuapl.edu/users/15730
Table 1: Overview of selected agent capabilities and perfor-
mance in the NeurIPS Reconnaissance Blind Chess compe-
tition in 2022 (Gardner et al., 2022). Scorca is the custom
agent proposed in this paper and explained in later sections.
In one version, but not the final one, Scorca models the op-
ponent’s senses, hence the outlined dot.
Agent
Tracks all board states
Tracks opponent infosets
Tracks full game state
Models opponent moves
Models opponent sense
Uses a chess engine
Senses to minimize states
Elo rank
Elo
StrangeFish2 • • 1 1762
Fianchetto
• • • 2 1644
Kevin • • • • • 3 1623
penumbra/Châteaux
• • • • 4 1621
Oracle
• • • 6 1465
trout
• 11 1116
attacker 12 1099
random
15 893
Scorca • • • ◦ • • - -
Table 1: Overview of selected agent capabilities and perfor-
or directly reconstruct the unknown full game state.
Furthermore, instead of searching for the best move,
it only uses the trained policy network to play.
Some other agents are used as baselines or for
comparison. The random agent takes a random ac-
tion at each round. The attacker agent has nothing but
a set of pre-designed strategies that aggressively at-
tack the king of the opponent. Finally, the trout agent
chooses the move recommended by Stockfish based
on a single board state estimate. It senses the location
where the capture just happened, or a capture could
happen in the next turn. Otherwise, a random location
is chosen for sensing, where none of its own pieces is
present.
A comparative overview of the performance of
these agents and their respective mechanisms, is avail-
able in Table 1 (extracted from (Gardner et al., 2022)).
It’s interesting to note that agents with more complex-
ity and features often underperform compared to their
simpler counterparts. Furthermore, of the agents that
demonstrated higher performance, only a few were
specifically trained for RBC without relying on pre-
existing chess engines.
It is important to note that in many cases only
short text descriptions of the agents are publicly avail-
able. The absence of research papers or public repos-
itories for most agents limits the potential for a more
comprehensive evaluation. Some agents are not open
source but developers can play against them on the
RBC platform, e.g. Châteaux.
A vital aspect evaluated for all agents in the
NeurIPS 2022 competition is the management of
game states, depicted in Table 2. Two key columns
of interest here are ’median states’ and ’engine move
agreement.’ ’Median states’ refers to the median
number of potential board states that an agent deems
plausible at any given moment. A noticeable trend
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
212

Table 2: Comparison of state management of the differ-
ent agents in the NeurIPS 2022 competition (Gardner et al.,
2022).
Agent
Median # States
# States Rank
# States ∆ Rank
Engine Move Agreement
Move Agree. Rank
Move Agree. ∆
Rank
Elo rank
Elo
StrangeFish2 32 10 +9 62% 6 +5 1 1762
Fianchetto
20 4 +2 69% 3 +1 2 1644
Kevin
16 2 -1 74% 1 -2 3 1623
penumbra/Châteaux
21 5 +1 53% 9 +5 4 1621
Oracle
16 2 -4 67% 4 -2 6 1465
trout
214 13 +2 44% 10 -1 11 1116
attacker
11356 15 +3 5% 15 +3 12 1099
random
2276 14 +1 8% 14 -1 15 893
can be observed: agents with a lower median state
number tend to demonstrate superior performance.
This observation could indicate some potential cor-
relation between the simplification of an agent’s state
space and its success in the game. The ‘engine move
agreement’ is a measure of the degree to which the
agent’s chosen moves align with the top three sug-
gested moves given the current actual board state.
Consistently, a lower median state count correlates
with a higher engine move agreement, indicating
that a streamlined perception of the game state often
aligns more closely with the suggested best moves.
However, there are intriguing exceptions to these
observations. For instance, Penumbra, despite scor-
ing only 43% on the engine move agreement column,
outperformed Kevin and Oracle. This lower score
could be attributed to Penumbra’s unique approach
that does not rely on a traditional chess engine. De-
spite having higher engine move agreement scores
and better uncertainty management, Kevin and Ora-
cle were not able to outperform Penumbra. This sug-
gests that specifically tailored training for RBC, rather
than solely relying on pre-existing knowledge and al-
gorithms from classical chess, can yield significant
advantages. Thus, the incorporation of RBC-specific
strategies and mechanisms might be a promising av-
enue to explore in future work.
3 KNOWLEDGE MODELING IN
THE RBC GAME
The main difference between RBC and classical chess
lies in the uncertainty of information within the game.
A key knowledge in RBC is the information that a
player has about its opponent. At each round, there
are three distinct moments when a player receives new
information about the game state: the sensing result
(the absolute information of the nine sensed squared),
move result (information by the game, on the actual
taken move by the piece and whether a capture hap-
pened or not), and opponent move result (information
by the game, whether a piece was captured by the op).
Following the receipt of these notifications, a player
can update their knowledge according to the new in-
formation. Specifically, we can track the knowledge
of a player exhaustively by listing all possible game
states and expanding or reducing this list according to
the new information. At each round, in the game, the
agent maintains a set of possible states as its knowl-
edge. For a transition to the next round, we expand
each state and keep only those expanded states that
align with the opponent’s move results.
Possible States Update Flow.
1. Set of Possible States. Let S
t
denote the set of all
possible states at time t.
2. Update After Opponent’s Move. After getting
notified by the game about the opponent’s move,
the set of possible states expands to a new set S
t+1
.
3. Sensing. We then scan a 3x3 area. Let R be the
3x3 sensed area. The updated set of states, af-
ter sensing, includes only those boards B ∈ S
t+1
where the squares in the sensed area of B match
the sensed area R:
S
′
t+1
= {B ∈ S
t+1
|
B[i, j] = R[i, j], ∀(i, j) ∈ R} (1)
4. Update After Agents’ Own Move: The agent
then decides on a move and makes it. Afterwards,
informed about the result of the move is obtained,
which leads to a new set of possible states, S
t+2
.
This process repeats until an agent wins or goes
timeout.
3.1 Knowledge Modeling for Sensing
The most crucial information the agents receive
comes after the sensing action. After sensing the 3x3
square on the board, and receiving complete insight
for the nine individual squares with their pieces on
them, the agents can remove all currently possible
states that are not consistent with the sensing result.
This is done by removing states that do not have the
same pieces on the same squares as the sensing result.
3.2 Knowledge Modeling for Moving
After the agent has decided on a move, the plat-
form informs the agent about the result of the move.
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess
213
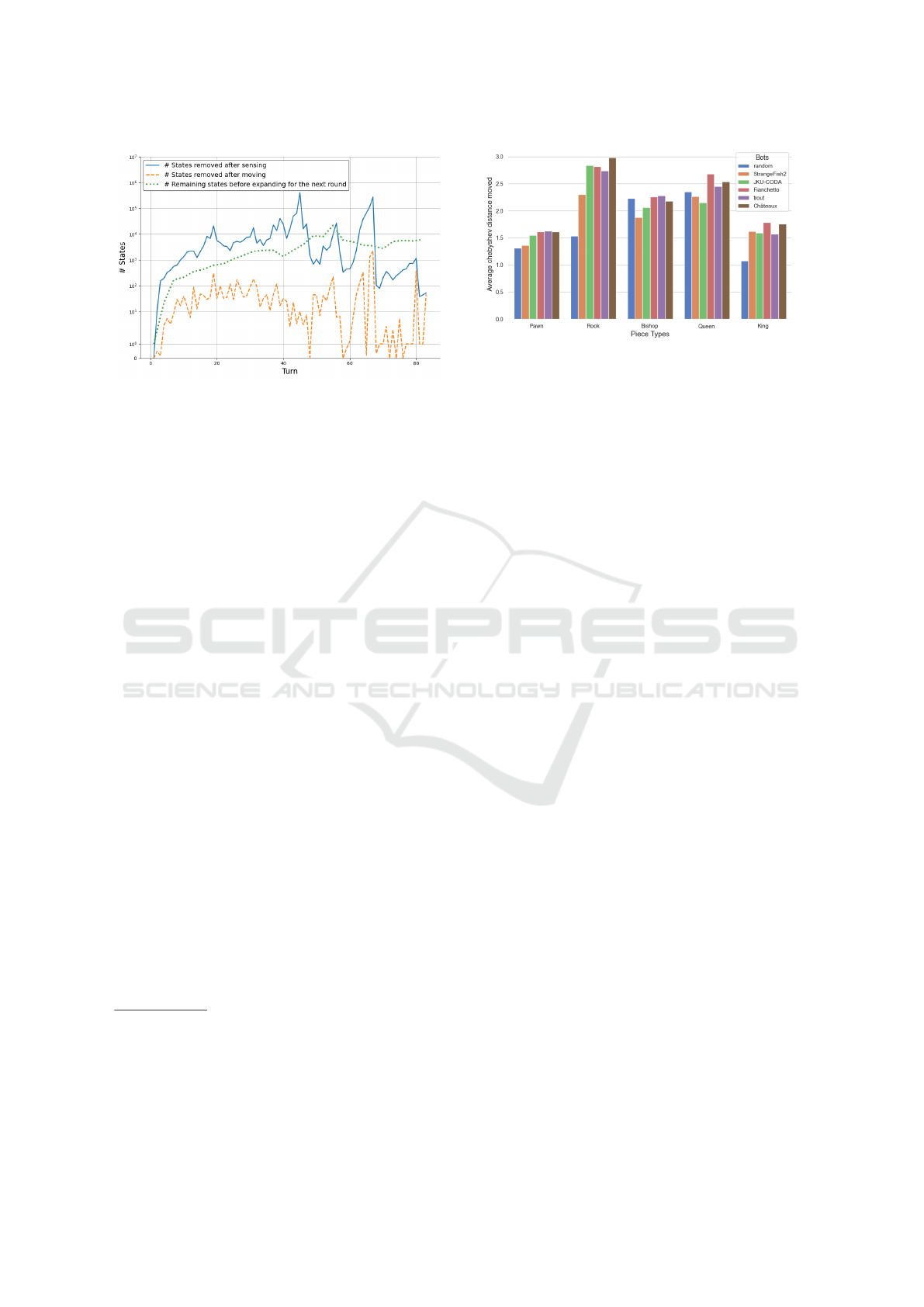
Figure 2: Number of removed states after sensing, moving
compared against the number of remaining states. Omitted
in this plot are the states added by expanding, after the op-
ponents turn.
This result includes whether the move was success-
ful, whether a piece was captured, and if so, on which
square. The type of the captured piece however is not
revealed. If a capture happened at a location different
from the intended destination, the agent’s piece stays
at the capture square (Figure 1). This new information
allows further refinement of the agent’s knowledge, as
game states that conflict with the move results can be
excluded. For example, if a piece was captured, all
game states that do not contain a piece on the capture
square are discarded. Similarly, if a sliding move was
successful, all boards with squares with a piece be-
tween the original and destination squares are purged
from consideration.
In certain instances, there can be overlapping in-
formation obtained from the sensing and moving
phases, such as when the 3x3 region sensed overlaps
with the trajectory of the agent’s move. To study RQ1,
we evaluated the knowledge obtained from different
actions and observations by measuring the number of
moved states. We compared the gain in information
by examining the number of states removed due to
sensing and moving. As Figure 2 indicates, sensing
can remove a significantly greater amount of states
than moving
14
. This is because sensing provides com-
plete knowledge of nine squares (including the type
and location of pieces), while moving can provide at
most partial information about seven squares (either
empty squares or an unknown piece type). Thus, in-
formation gain relies on a good sensing strategy.
14
To standardize the metrics, we utilized the naive en-
tropy sensing mechanism within the game evaluations. We
replicated agent movements from a corpus of 500 games,
sourced from the publicly accessible archives at https:
//rbc.jhuapl.edu/about. Subsequently, we replaced the
original sensing method with our naive entropy sensing and
made measurements throughout the games.
Figure 3: Average distance moved in one turn per piece
type for different agents. Data taken from the NeurIPS 2022
RBC tournament.
3.3 Insights with Theory of Mind
The information provided after an opponent’s move
is limited to whether one of the agent’s own pieces
was captured and, if so, the location of the square on
which this occurred. Armed with this information,
we consider all new possible states, based on all the
moves the opponent could have executed in all possi-
ble positions. In this paper, however, we do not assess
the ability to mimic the opponent’s moving strategy,
owing to its complexity.
In Reconnaissance Blind Chess (RBC), under-
standing hidden information and effectively using this
knowledge are crucial. A valuable but sometimes ne-
glected aspect is analyzing the movement characteris-
tics of pieces. By examining piece movements, play-
ers can guess possible strategies and measure the ag-
gressiveness of their opponents. Figure 3 provides an
insightful view of this concept by showing the average
distance moved by different chess pieces over multi-
ple turns. This data has been gathered from various
agents that participated in the NeurIPS 2022 compe-
tition. Understanding the distances moved by pieces
can be informative. For example, a tendency for long
sliding movements with pieces like rooks or bishops
might indicate an aggressive strategy, as it can be
used to obtain more information but can also lead to
a greater risk. On the other hand, shorter movements
may suggest a more defensive approach.
By analyzing the data in Figure 3, one can see pat-
terns among the agents. Some agents might often use
pieces like queens and bishops for longer moves, in-
dicating an aggressive strategy. On the contrary, some
others show a preference for shorter moves with cer-
tain pieces, hinting at a more defensive approach such
as StrangeFish2. Moreover, the insights gained from
these movement patterns can be vital in predicting an
opponent’s moves and understanding the opponent’s
strategy, especially in RBC, where information is par-
tially hidden. By incorporating an analytical approach
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
214

to piece movements, players can make more informed
decisions and adjust their strategies. However, a com-
plete analysis of the opponent’s strategy and knowl-
edge using ToM requires replaying the game at every
round before sensing (with knowledge about the op-
ponent’s knowledge updated), which can be computa-
tionally expensive and not feasible in real games with
the time limit and RAM constraint.
4 SENSING STRATEGY
As mentioned above, sensing is the main source of in-
formation gain, hence having a good sensing strategy
in RBC is crucial for an agent. Balancing the strategy
between sensing the location of the opponent’s pieces
and the agent’s planned moves can be difficult. Next,
we analyze different sensing strategies and tactics and
compare their effectiveness in reducing uncertainty.
4.1 Entropy Sensing
A naive way of handling sensing to remove uncer-
tainty is to sense the 3x3 area with the most unknown
information. This can be materialized as the highest
combined Shannon entropy:
H(s) = −
13
∑
i=1
p
i
(s)log
2
p
i
(s)
In this formula, H(s) represents the entropy of a spe-
cific square s on the board. The term p
i
(s) is the prob-
ability of the i-th piece being present at square s, with
i ranging from 1 to 13 to cover all possible piece types
(six per color), including the absence of a piece. The
probability here is naively defined as the percentage
of boards in which the piece is present at each square
divided by all possible board states. The overall en-
tropy of the 3x3 area, H(A), where A is a 3x3 region
of the board, is then the sum of the entropies of its in-
dividual squares. The agent’s goal is to select the 3x3
area with the highest overall entropy for the next sens-
ing action, as this area represents the region of max-
imum uncertainty and thus has the potential for the
greatest information gain. Agents using this entropy-
based sensing strategy would always choose to sense
areas with the most amount of missing information.
An example of how the entropy map after white’s first
move can be seen in Figure 4.
Figure 5 illustrates the average number of remain-
ing states using the naive entropy sensing strategy
compared against the history of the senses made from
500 games from he NeurIPS 2022 tournament. For
the comparison, we replayed each game twice, once
using the historic sense that was actually used in the
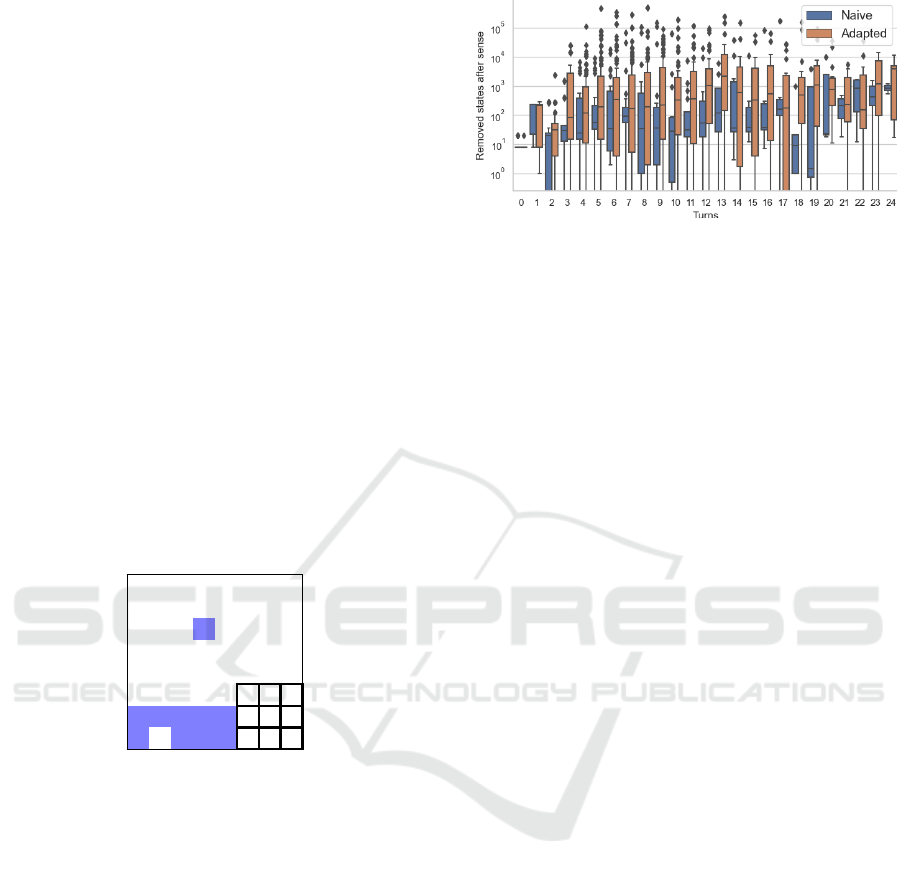
Figure 4: Example of how the entropy map looks from
black’s view. after white makes their first move. All fields
on which the piece can’t move on the first turn has an en-
tropy of 0, as all 20 expanded possible states agree with the
figures on these squares. The highest entropies can be ob-
served on the fields that can be reached by the knights, as
two pieces can be on those fields. Using the naive entropy
sense, black would here scan b3 or g3, as the surrounding
3x3 squares have the highest combined entropy.
Figure 5: Comparison of the average number of remaining
states after the sense action for corresponding turn.
game, and once using the naive entropy sense. We
then calculated the remaining states. It is obvious
that the naive entropy sensing strategy outperforms
agents’ average sensing strategy by a large margin
15
.
Another interesting observation is, that the naive en-
tropy leads to a stable amount of states even as the
game progresses, while the historic senses lead to a
higher amount of states in the later game.
4.2 Heuristics
In a game with equally probable move actions, a
naive entropy sensing strategy optimally reduces un-
certainty. However, in real scenarios, move distribu-
tions aren’t uniform. Thus, enhancing the naive en-
tropy sensing strategy with heuristics offers improve-
ments.
15
Note that these games also include agents with
“weake” sensing strategies, such as sensing the last square
where a capture happened, or estimating where the oppo-
nent’s king is based on the last known position. Moreover,
some agents’ strategies do not aim to minimize the number
of possible states, but rather try to minimize the uncertainty
in a specific area, e.g. the agent’s piece to move in.
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess
215
Piece Value Weighting. We introduce weights for
the six chess piece types, asserting that a piece’s value
correlates with the importance of knowing its loca-
tion. For instance, discerning an opponent’s king lo-
cation is more critical than a pawn’s. Piece values are
commonly expressed in Centipawn values. Assign-
ments are: Pawn: 100, Knight: 290, Bishop: 310,
Rook: 500, Queen: 900, and King: 3000. Although
a king’s capture isn’t feasible in classical chess (its
value could be infinite), we assign it 3000 centipawns
to avoid a singular focus on the king. These values,
when multiplied by the probability of a piece’s pres-
ence and the square’s entropy, yield weighted entropy
sensing.
King Safety. Factoring in king safety is another
heuristic. This involves assigning a bonus to squares
threatening our king and adjusting the square’s en-
tropy. The underlying logic is to mitigate surprise
attacks. In Figure 6, a knight’s move to d6 seems dis-
advantageous in classical chess, but in RBC, it could
set a trap if the black player is unaware. Similarly,
squares threatening the opponent’s king get a higher
value, allowing us to potentially set traps.
8
rmblkans
7
opo0Zpop
6
0Z0M0Z0Z
5
Z0Zpo0Z0
4
0Z0Z0Z0Z
3
Z0Z0Z0Z0
2
POPOPOPO
1
S0AQJBMR
a b c d e f g h
Figure 6: The board depicts both actual positions and the
black player’s awareness. Blue denotes black’s knowledge
gaps. After sensing around g2, black’s awareness is limited,
potentially overlooking threats.
Time Penalty. Finally, we implemented a time
penalty for previously sensed squares. For each
square, we track the last sensing turn, then calculate
a penalty, P = d
t
× pv, where d (set to 0.9) is the de-
cay factor, t is turns since the last scan, and pv (set
to 1000) is the penalty value. This penalty is sub-
tracted from the square’s entropy, discouraging repet-
itive sensing of recently checked regions.
Combining these heuristics results in the Adapted
entropy sense. Figure 7 compares it to the Naive
entropy sense. By replaying the same game histo-
ries and applying different sensing algorithms, the
adapted version showed significant superiority, under-
scoring the heuristic’s effectiveness.
Figure 7: Logarithmic comparison between the naive and
heuristically-adapted entropy senses.
4.3 Opponents Predicted Moves
Opponents Move Weights. Another strategy for
sensing revolves around factoring in our knowledge
about the opponent. For that, using a method ex-
plained in Section 5, for all possible boards we assign
scores to all possible moves. We save a combination
of these scores for all moves in a dictionary. The same
way as done with the entropy, we create an 8x8 ma-
trix representing the board. Here, we add the score
assigned for each move to the to square of the move,
and the from square of the move. I.e. when moving
the rook from ‘A1’ to ‘A4’, and the score has a value
of 10, we add 10 to the squares ‘A1’ and ‘A4’ in the
matrix.
Next, in the same way as done with the entropy, we
search for the 3x3 square with the highest combined
sum of the individual squares in it. The intuition
for this strategy is, that we anticipate the opponent’s
moves and preemptively prepare our strategies. As-
signing a score to each potential move facilitates the
prediction of the opponent’s next move. This is pred-
icated on the assumption that an opponent is more
likely to move pieces to squares with higher scores.
The accumulation of scores in the squares ’A1’ and
’A4’ essentially registers the potential for this rook
move to occur.
The 8x8 matrix acts as a sensory map of the game
state, with higher scores indicating areas of the board
that are likely to see more activity. This map provides
a strategic blueprint for agents anticipating the oppo-
nent’s moves and planning our own. It underpins the
notion that knowledge of the opponent’s likely moves
can be as valuable as knowing the current state of the
game.
Likely Board States. With a generally similar idea,
we can also use the calculated best opponent moves
for all states. As mentioned in Section 3, all possible
board states are expanded into all next possible board
states, based on all pseudo-legal moves for each state.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
216

Now with the move scores for all moves in each state,
we are able to expand into all possible states, and also
note all n likely states, based on the best n moves for
each state. The likely states can then be used for fur-
ther calculations instead of all states.. The intuition
here is, that there is little incentive to try to calculate
the entropy regarding states, that are very unlikely to
the truth.
Figure 8: Comparison of the three different sensing strate-
gies in a logarithmic scale. All data is based on the same
history games and the value indicates the mean of amount
of states after the sense action.
In Figure 8 we can see the comparison of the three
different sensing strategies applied on the same his-
tory games. It becomes clear, that sensing purely
based on likely states opposed to all possible states
performs way better. An interesting obervation is, that
the sensing based on the opponents move weights by
far performs the worst, with on average roughly 10x
more states compared to the normal entropy sense,
and 100x more states compared to the likely states
entropy sense.
5 MOVING STRATEGIES
The moving strategy complements the sensing strat-
egy. Together, they are the core of the design of
an agent. In this section, we analyze different move
strategies and tactics and compare their effectiveness
in winning games. Also, we will come back to RQ1
and RQ3, and analyze if and how modelling of oppo-
nent’s knowledge can be used to improve the agents.
5.1 Classical Chess Engine
To answer the first research question, we first need
to establish a baseline for the move strategy. For
that, we use the classical chess engine Sunfish (Ahle,
2022). Sunfish is a simple chess engine, written in
Python. It uses the Minimax algorithm with alpha-
beta pruning and a simple evaluation function to de-
termine the best moves given a board state. The eval-
uation function is based on the material value of the
pieces on the board, and the positional value of the
pieces. The decision to pick Sunfish over more estab-
lished and clasically stronger engines like Stockfish
was prompted by Sunfish’s advantageous lightweight
architecture which, in contrast to more powerful en-
gines such as Stockfish, allowed for greater flexibility
in manipulating the source code to accommodate our
specific requirements. Notably, we introduced modi-
fications such as enabling the ability to castle, travers-
ing through checks, and altering the termination con-
dition of the underlying minimax algorithm from a
checkmate state to the explicit capture of the king.
5.1.1 Baseline Move Strategy
The chess move strategy utilizes a combination of ad-
vanced algorithms and heuristics to select the opti-
mal move in a given position. The strategy is primar-
ily centered around evaluation functions, probabilistic
scores, and exploitation of an opening book to obtain
an advantageous position over the opponent.
Opening Book Utilization. To capitalize on well-
established initial moves, an opening book is em-
ployed in the early phase of the game. Opening books
are databases of opening moves that have been played
in countless games across history. By utilizing an
opening book, the strategy can bypass the need for
complex computations in the initial stages and save
resources for later stages of the game. To handle the
uncertainty, we check for all currently possible game
states, for which opening move responses exist. The
one picked most often, is the one played by the base-
line agent. If no board state is in the opening phase
anymore, we continue with the normal move strategy.
Evaluation of Board States. Once the game has
progressed beyond the opening phase, the engine pro-
ceeds to analyze the various potential board states.
The number of board states can be extensive, so a
sampling technique is employed to select a random
subset of board states to analyze, if the amount of
possible boards exceeds a threshold. This reduces
the computational burden while still providing a rep-
resentative set of positions for evaluation.
Each board state is assigned a score based on var-
ious chess-specific heuristics and the chess engine’s
evaluation function. Notably, the evaluation considers
whether a move puts the king in check and whether
it is a capturing move. Based on the scores, the top
and bottom few boards are selected for further anal-
ysis. This is premised on the assumption that moves
leading to the highest and lowest scores are the most
impactful as in the best boards the agent might have
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess
217

a chance to win and in the lowest scored boards the
agent might need to avoid losing.
Processing Selected Board States. The highest
and lower n ranked board states are considered for this
step. For each of these boards, all possible moves are
executed. If a move is not legal on a certain board,
i.e. a sliding move through an opponents piece, it
will count towards the next legal move. For all moves
on a specific board, a second evaluation of the board
it done after the move execution, and the difference
between the post move and pre move board score is
added to a dictionary, with the move as the key. This
difference is multiplied with the difference of the win
probability and 0.5, again to assign a higher signifi-
cance to very good and very bad board states. Ad-
ditionally, a longer search time is allocated to more
extreme boards for the Sunfish engine to allow for
deeper searches in extreme positions.
Move Selection. Finally, the strategy selects the
move with the highest evaluation as the optimal move.
This move is chosen because it maximizes the po-
sition’s strength based on the employed heuristics
and evaluation functions. The selected move is then
played on the board.
5.1.2 Baseline Move Strategy with Estimated
Opponents Knowledge
In addition to the baseline move strategy, we also im-
plemented a version, in which we estimate the oppo-
nents knowledge, in order to investigate RQ1 in more
depth. For that, we try to not simply score all pos-
sible states with our chess engine and then procede
with the moves evaluations, but rather first try to esti-
mate what the opponent knows about the current true
board state, for each of the possible boards. For this,
we implemented a graph structure that represents our
knowledge for the whole game, with the head node
being the initial board state. From every node, the
graph is then extended with all possible moves the op-
ponent could do in position. During the game, certain
leaf nodes are deleted based on the sensing actions,
move actions and opponents’ move actions.
The difference to the baseline agent comes in the
following board evaluation step. For every possible
leaf node, we replay the game entirely from the op-
ponents point of view. With the graph strucutre, we
know for every leaf node which moves the opponent
must have made to end in a specific node. As we don’t
know the senses of the opponent, we assume a naive
entropy sense. Subsequently, we average the scores
of all possible board states from the opponent’s per-
spective and integrate these into a composite ranking
that encapsulates our evaluation and the opponent’s
potential assessment. In this version, the new eval-
uations for the board states replace the simpler ones
from the baseline agent. The rest of the move strategy
stays the same.
It is important to note that this evaluation of re-
playing for all leaf nodes is very computationally ex-
pensive as it requires the game to be played from the
beginning with all the states tracked. This is espe-
cially the case given that this game can face a high
number of possible board states at each step. To have
this version of the agent play offline, we needed to
stop the game timer for this part of the calculation.
Hence, the results of this agent design compared to
the others can be seen more as a proof-of-concept,
rather than something that can be utilized in its cur-
rent form in real games.
5.2 Utilizing the Leela Chess Zero
Engine
To have a deeper look into RQ3 (what is the most
efficient moving strategy), we also implement a strat-
egy, that utilizes the Leela Chess Zero engine. Leela
Chess Zero (LCZero or Lc0), an open-source project,
is a next-generation chess engine. Unlike traditional
chess engines that rely on hand-designed evaluation
functions and complex search algorithms to analyze
the billions of possibilities in a position, LCZero
utilizes a Machine Learning approach. Neural net-
works have been trained through Supervised Learning
and Reinforcement Learning to precisely estimate the
value of a single position and to successfully suggest
powerful moves.
5.2.1 Lc0 Functionality
The basis of LCZero is a recuperation of the tech-
niques used in Google’s AlphaZero project (Haque
et al., 2022; Silver et al., 2017). The ground-breaking
achievements of AlphaZero set an impressive prece-
dent which LCZero attempts to emulate, albeit with-
out the colossal computational resources available to
Google. LCZero employs a neural network combined
with a Monte-Carlo Tree Search (MCTS). MCTS is
a statistical search algorithm where the focus of the
search deepens on more promising areas, this tech-
nique starkly contrasts the Minimax search trees im-
plemented by other chess engines such as Stockfish.
The utilization of MCTS leads to the evaluation of
fewer nodes in the game tree but these nodes are eval-
uated more accurately due to the neural network’s
superior ability to generalize from its extensive self-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
218

play training regimen. One of the big advantages of
LCZero is that though it’s neural network, a single
board evaluation can provide agents, a score for the
board as well as scores for all possible moves. Es-
pecially in a game like Reconnaissance Blind Chess,
this can be a huge advantage if there are hundrets or
thousands of possible board states to be evaluated.
Given the efficiency that LCZero provides in eval-
uating board states, we are not forced to pick just
the best and worst n boards, but rather can evaluate
all possible boards. Subsequently, for each individ-
ual board, we utilize the Leela chess zero network to
give an evaluation of all possible moves on that board.
Those moves are ranked best to worst and, same as
with the baseline agent, stored in a dictionary. As
the move scores that LCZero provides are not in cen-
tipawns, and in general rather arbitrary depending on
the board, instead of working with specific scores for
each move we work with a set minus that every move
gets depending on their index in the ranking.
pv = 4 · log(idx + 1)
Here, pv stands for the penalty value received by the
move, based on the index. As the order of the first n
moves is much more significant than the order of the
last n moves, a logarithmic function is used to calcu-
late said penalty values. To account for the specifics
of RBC, some new scoring heuristics needed to be im-
plemented as well. For example, trying to capture the
king while leaving the agent’s king in check is legal
in RBC, but not the case in classical chess. Similarly,
trying to execute an illegal move for a pawn in classi-
cal chess can be a valid option in RBC. For example,
in the case where a pawn is trying to capture a piece
at a given location where nothing is placed. Such spe-
cial cases are not in Lc0 by design and thus handled
as exceptions when adapted for use in our agent.
6 AGENT ENGINEERING
Given that the rationale for the choice of strategies
of our agent Scorca is scattered in Section 3, 4,
and 5, here we provide a summary. For the sens-
ing strategy, we chose the adapted entropy sensing
with likely board state filtering, based on the eval-
uations in Section 3 and 4. This combination pro-
vided superior uncertainty reduction capabilities. For
the moving strategy, we utilized the Leela Chess Zero
engine, as discussed in Section 5. The neural net-
work approach demonstrated significant advantages
in efficiently evaluating numerous board positions and
moves. This efficiency is critical for navigating the
expansive state space of RBC. We chose this pairing
Table 3: Comparison of performance of the different move
strategies. Winrate to be read as row agent won n% of
games against column agent. 10 games were conducted per
matchup.
Scorca
Trout StrangeFish2
(S) (S+ToM)
Scorca (S) - - 60% -
Scorca(S+ToM) 70% - 70% -
Scorca(L) 100% 100% 90% 70%
for the complementary uncertainty management and
tactical advantages that were showcased during the
testing. Parameters and hyperparameters were fine-
tuned after testing various combinations of strategy
through self-play.
The offline evaluation results were obtained using
a laptop equipped with an Apple M1 Max chip. This
chip comprises a 10-Core CPU (base clock speed of
3.2 GHz), a 32-Core GPU, and 32GB of RAM in to-
tal. All Scorca (v36)
3
games were completed by in-
teracting with the server at Johns Hopkins University
between 27/09/2023 and 05/10/2023.
7 EVALUATION
To compare the efficiency of the different move strate-
gies, we had them play against each other and one of
the provided baseline agents, Trout. As can be seem in
Table 3, the move strategy utilizing Leela chess Zero
heavily outperforms the other strategies. The resons
for that could be a general superiority against the Sun-
fish engine, even with manual tweaks, but also the
speed that LC0 provides. It can be seen, however,
that adding the estimation of the opponent’s knowl-
edge to the Sunfish baseline agent can add a signifi-
cant improvement boost to the agent
16
. We took the
best agent and also had it compete offline against the
current No.1 agent, StrangeFish2. In our offline runs,
it won 7/10 times against StrangeFish2.
17
The latest
version of Scorca (v36)
3
at the time of writing has
7 wins out of 11 total matches against StrangeFish2,
resulting in a winning rate of 64%.
Upon submission (22/10/2023), Scorca ranked
second among 101 agents/human players. Despite its
individual match superiority against the current best
agent, it appears that the Elo ranking emphasizes sus-
tained performance over a series of matches, which
might be a reason why our agent has not yet ascended
to the top. Furthermore, some games were close to a
tie with Châteaux, which also led to Elo decreases.
16
Disregarding the lower efficiency in the calculation of
the scores.
17
All games are attached in the supplementary material.
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess
219

8 DISCUSSION
For deep learning-based agents like Penumbra and
JKU-CODA, despite being specialized for RBC, still
lose to agents relying on classical chess engines like
StrangeFish. One reason may be that current deep
learning approaches do not effectively incorporate
knowledge modeling into their decision-making, fa-
voring board position evaluation over belief model-
ing. Combining learned features with explicit belief
tracking remains a problem in this game.
Our proposed Scorca agent has a transparent
pipeline for modeling knowledge, sensing, and mov-
ing. This modular design allows examination of
its reasoning and facilitates debugging of compo-
nent strategies. The pipeline demonstrates the impor-
tance of specialized RBC techniques over just rely-
ing on classical chess engines and algorithms. As an
open source project, Scorca provides a strong base-
line for future research to build upon with innovative
approaches such as deep reinforcement learning.
Modelling an opponent’s knowledge, actions, and
potential strategies is a complex endeavor with agents
risks and rewards. The difficulty of learning and rea-
soning about an opponent’s strategy should not be un-
derestimated. With a fixed strategy opponent, model-
ing is feasible through fine-tuning of parameters. But
each RBC game has a limited number of steps, mak-
ing it challenging to estimate strategy parameters, es-
pecially for neural network based agents. The search
space explodes combinatorially with the number of
possible boards and moves.
A key weakness of current agent designs is the in-
ability to handle extremely risky opponent strategies.
For instance, an opponent may make unlikely sacri-
fices that classical chess engines deem poor moves.
Specialized training to recognize unconventional off-
beat openings could make agents more robust. Over-
all, continued research is needed to develop agents
that surpass current capabilities in knowledge repre-
sentation, reasoning, and opponent modeling.
9 CONCLUSION AND FUTURE
WORK
In conclusion, this paper systematically evaluated dif-
ferent knowledge modelling, sensing, and moving
strategies. We presented a novel combination of
strategies for sensing and moving, and evaluated the
corresponding agent. Recall that for RQ1, we stud-
ied the modeling of knowledge and its impact on the
performance of agents. As shown in a comparison of
the different agents, most notably in the comparison
of the baseline agent with and without the estimated
opponent’s knowledge, we can observe that the esti-
mation of the opponent’s knowledge can lead to a not-
icable improvement in the game. This shows a clear
advantage of the inclusion of Theories of Mind in the
game of Reconnaissance Blind Chess.
As for RQ2, we evaluated different sensing strate-
gies to diminish the game’s inherent uncertainty. We
were able to show that the naive entropy sense over
all possible states provides a strong baseline in terms
of removed uncertainty. We then showed that an im-
proved version of it with manually picked heuristics
can further significantly improve the performance. If
we then combine it with an estimate of which states
are the most likely to be in, based on the opponent’s
estimated moves, we can further reduce the uncer-
tainty roughly by a factor of 10.
For RQ3, based on our understanding of the mod-
elling of knowledge with uncertainty, we studied
some efficient move strategies. Analyzing the three
different investigated move strategies, we observed
that the most promising one is the Neural Network
approach utilizing Leela Chess Zero. The reason for
that is the combined information about the current
board evaluation as well as the evaluation for all dif-
ferent moves, with a single forward pass in the trained
network. This speed advantage over classical chess
engines have shown an advantage in Reconnaissance
Blind Chess, where the uncertainty of the game leads
to a significantly higher state-space.
Our proposed Scorca agent employs a transparent
pipeline, which could be used for the examination of
decisions, and debugging of future strategies. More-
over, as an open-source project, our agent can serve
as a baseline for the development of agents in the fu-
ture. By using a faster chess engine, our agent re-
acts faster than StrageFish2, making it more suitable
for testing purposes in the development stage. Our
approach could inspire the handling of events with
imperfect information and uncertainty handling and
inspire new weighting schemes for each piece in the
RBC game.
One of the most promising approaches that do
not rely on classical chess engines is the approach of
the Penumbra and JKU-CODA. Although they were
specifically designed and trained for RBC, they are
still behind the leading agent, StrangeFish2.
Using a neural-symbolic representation could
have great potential. Some recent research proposed
a scalable method to approximate the belief structures
using recursive deep generative models used for be-
lief modeling and to obtain representations useful to
acting in complex tasks (Moreno et al., 2021). The
problem of scalability could still remain. Most re-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
220

cently, some research explored the use of large lan-
guage models (LLMs) for task planning (Singh et al.,
2023). Given that LLMs can act fast and further
fine-tuned, by feeding recorded games in past tour-
naments, we could potentially obtain a model for fast
estimation of the belief state with flexible strategies
proposed for the best next actions to take. This could
then be combined with our approach or other existing
approaches mentioned in Section 2.
The modeling of an opponent’s knowledge, ac-
tions, and potential strategies is a complex endeavor
with agents’ risks and rewards. As evidenced by the
baseline agent augmented with opponent knowledge
estimation, some performance gains are achievable
through opponent modeling. However, the associated
computational costs can be prohibitive.
As RBC agents grow stronger, opponent modeling
could become more advantageous to exploit subtle
weaknesses. But the models themselves would need
to become more sophisticated, requiring innovations
in belief-state representation. Future RBC research
would benefit from a deeper investigation into differ-
ent methods and architectures for opponent model-
ing, along with an analysis of when benefits materi-
alize against baselines without modeling. Deep rein-
forcement learning methods that leverage neural net-
works to estimate value functions may be a promis-
ing approach to handle this complexity. Integrating
neural and symbolic techniques may allow agents to
reap the rewards of opponent insights without pro-
hibitively high complexity.
The RBC game is a challenging game due to its
extremely large state space. None of the existing
agent has claimed a successful mechanism to guess
the opponent’s knowledge and strategy. Modifying
the game by reducing the state space and extending
the time could be a possible means of triggering future
agents to investigate further into approaches mainly
focusing on ToM.
ACKNOWLEDGMENTS
The authors appreciate the help from Anna-Maja
Kazarian, Boy Kouwenberg, Frank van Harmelen, Pe-
ter Bloem, and the host of the RBC game.
REFERENCES
Ahle, T. D. (2022). Sunfish chess engine. GitHub reposi-
tory: https://github.com/thomasahle/sunfish. Date of
access: 2023-10-08.
Apt, K. R. and Simon, S. (2021). Well-founded extensive
games with perfect information. 335:7–21.
Bertram, T. et al. (2022). Supervised and reinforcement
learning from observations in reconnaissance blind
chess. In IEEE Conference on Games, 2022, pages
608–611. IEEE.
Clark, G. (2021). Deep Synoptic Monte-Carlo Planning in
Reconnaissance Blind Chess. In Advances in Neu-
ral Information Processing Systems, volume 34, pages
4106–4119. Curran Associates, Inc.
Gardner, R. W. et al. The first international competition in
machine reconnaissance blind chess. In Proceedings
of the NeurIPS 2019 Competition and Demonstration
Track, pages 121–130. PMLR. ISSN: 2640-3498.
Gardner, R. W. et al. (2022). The machine reconnaissance
blind chess tournament of NeurIPS 2022. In Ciccone,
M., Stolovitzky, G., and Albrecht, J., editors, Proceed-
ings of the NeurIPS 2022 Competitions Track, volume
220 of Proceedings of Machine Learning Research,
pages 119–132. PMLR.
Haque, R. et al. (2022). On the road to perfection? evalu-
ating leela chess zero against endgame tablebases. In
Advances in Computer Games, volume 13262, pages
142–152. Springer International Publishing.
Markowitz, J. et al. (2019). On the complexity of recon-
naissance blind chess. ArXiv, abs/1811.03119.
Moreno, P. et al. (2021). Neural recursive belief
states in multi-agent reinforcement learning. ArXiv,
abs/2102.02274.
Newman, A. J. et al. (2016). Reconnaissance blind multi-
chess: an experimentation platform for ISR sensor fu-
sion and resource management. In Signal Process-
ing, Sensor/Information Fusion, and Target Recogni-
tion XXV, volume 9842, pages 62–81. SPIE.
Perrotta, G. et al. (2019). The second NeurIPS tourna-
ment of reconnaissance blind chess. In Proceedings of
the NeurIPS 2021 Competitions and Demonstrations
Track, pages 53–65. PMLR. ISSN: 2640-3498.
Silver, D. et al. (2017). Mastering chess and shogi by self-
play with a general reinforcement learning algorithm.
Singh, I. et al. (2023). Progprompt: Generating situated
robot task plans using large language models. In 2023
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 11523–11530. IEEE.
Taufeeque, M. et al. (2022). Fianchetto: Speed, belief,
guile, caution to win at reconnaissance blind chess.
Bachelor’s thesis. https://taufeeque9.github.io/assets/
pdf/bachelors_thesis.pdf.
Knowledge Modelling, Strategy Designing, and Agent Engineering for Reconnaissance Blind Chess
221
