
Variational Quantum Circuit Design for Quantum Reinforcement
Learning on Continuous Environments
Georg Kruse
1
, Theodora-Augustina Dr
˘
agan
3
, Robert Wille
2
and Jeanette Miriam Lorenz
4
1
Fraunhofer Institute for Integrated Systems and Device Technology, Erlangen, Germany
2
Technical University of Munich, Department of Informatics, Munich, Germany
3
Fraunhofer Institute for Cognitive Systems IKS, Munich, Germany
4
Ludwig Maximilian University, Faculty of Physics, Munich, Germany
jeanette.miriam.lorenz@iks.fraunhofer.de
Keywords:
Quantum Reinforcement Learning, Variational Quantum Circuit Design, Continuous Actions Space.
Abstract:
Quantum Reinforcement Learning (QRL) emerged as a branch of reinforcement learning (RL) that uses quan-
tum submodules in the architecture of the algorithm. One branch of QRL focuses on the replacement of neural
networks (NN) by variational quantum circuits (VQC) as function approximators. Initial works have shown
promising results on classical environments with discrete action spaces, but many of the proposed architec-
tural design choices of the VQC lack a detailed investigation. Hence, in this work we investigate the impact
of VQC design choices such as angle embedding, encoding block architecture and postprocessesing on the
training capabilities of QRL agents. We show that VQC design greatly influences training performance and
heuristically derive enhancements for the analyzed components. Additionally, we show how to design a QRL
agent in order to solve classical environments with continuous action spaces and benchmark our agents against
classical feed-forward NNs.
1 INTRODUCTION
Quantum computing (QC) is a research field that is
drawing a lot of attention due to the expected compu-
tational advantages. There are many possible applica-
tion fields, such as quantum chemistry, cryptography,
search algorithms and others (Dalzell et al., 2023).
Moreover, quantum hardware is becoming increas-
ingly accessible, with noisy intermediate scale quan-
tum (NISQ) devices already being available. This cre-
ates the possibility of designing, implementing and
benchmarking QC algorithms that are NISQ-friendly
and comparing them against classical methods in or-
der to assess potential quantum advantage at the cur-
rent state of technology.
Quantum machine learning is one of the most
promising candidates to show quantum advantage
on NISQ hardware. Variational quantum algorithms
(VQA) for supervised learning (P
´
erez-Salinas et al.,
2020), for unsupervised learning (Benedetti et al.,
2019; Du et al., 2020), and for reinforcement learn-
ing (Jerbi et al., 2021; Skolik et al., 2022) have
been proposed and have already been implemented
on NISQ machines. In supervised learning, neural
networks (NN) were replaced with variational quan-
tum circuits (VQC). While initial studies suggest
that VQCs inhibit preferable properties such as bet-
ter trainability (McClean et al., 2018), other analy-
ses of important properties such as learning capabil-
ity and generalization errors (Abbas et al., 2021; Caro
et al., 2022; Banchi et al., 2021) remain inconclusive
with regard to the advantages of quantum computa-
tion. Whether VQCs show reliable advantage over
NNs therefore remains an open question (Qian et al.,
2022).
The literature in the subdomain of quantum re-
inforcement learning (QRL) is yet sparse. Multi-
ple approaches have been proposed and can be di-
vided into several categories, ranging from quantum-
inspired methods that mainly use classical computa-
tion, to purely quantum approaches that require fault-
tolerant devices that are not yet available (Meyer
et al., 2022). A main branch of research are hybrid
quantum-classical algorithms that contain VQCs as
function approximators whose trainable parameters
are updated using classical methods, such as gradi-
ent descent. This branch of QRL, also referred to
as VQC-based QRL, is of special interest since the
Kruse, G., Dr
ˇ
agan, T., Wille, R. and Lorenz, J.
Variational Quantum Circuit Design for Quantum Reinforcement Learning on Continuous Environments.
DOI: 10.5220/0012353100003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 393-400
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
393
encoding block
variational block
entangling block
. . . . . .
q
0
. . . . . .
q
1
. . . . . .
q
2
|0⟩
H
R
y
(s
0
· λ
i,0
) R
z
(s
0
· λ
i,3
) R
z
(θ
i,0
) R
y
(θ
i,3
)
µ
i
, σ
i
= f(q
0
, q
1
, q
2
)|0⟩
H
R
y
(s
1
· λ
i,1
) R
z
(s
1
· λ
i,4
) R
z
(θ
i,1
) R
y
(θ
i,4
)
|0⟩
H
R
y
(s
2
· λ
i,2
) R
z
(s
2
· λ
i,5
) R
z
(θ
i,2
) R
y
(θ
i,5
)
n layers
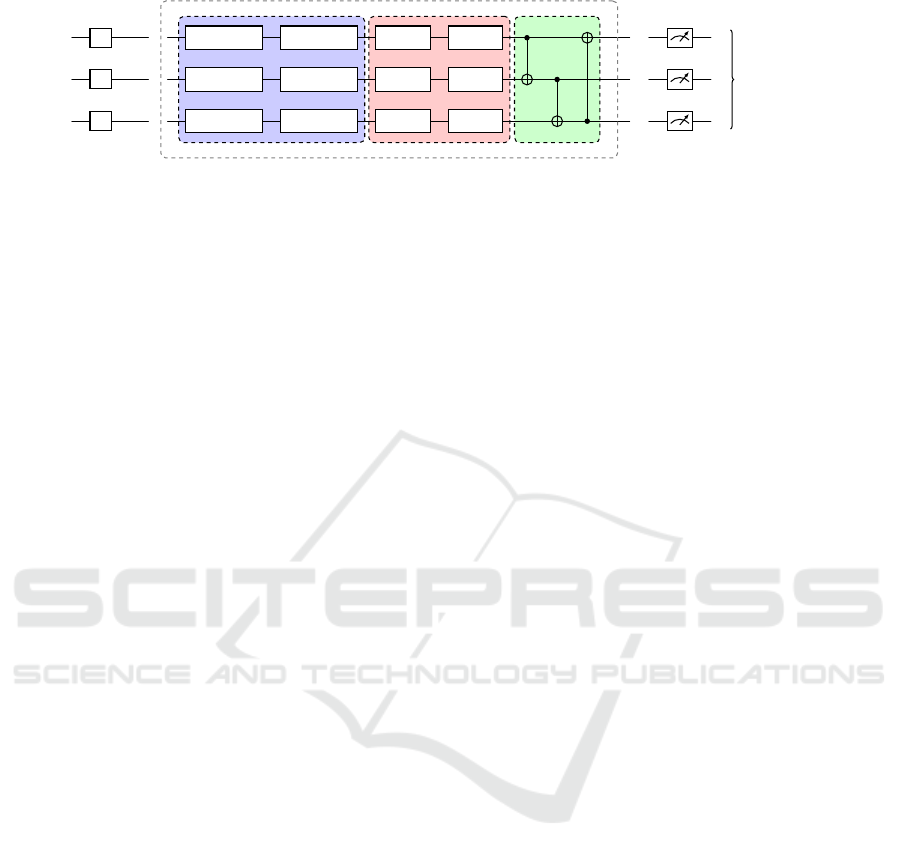
Figure 1: An exemplary VQC with three qubits consists of multiple layers n. Each layer has three blocks: an encoding block
(with input state s and scaling parameters λ), a variational block (with variational parameters θ) and an entangling block (a
daisy chain of CNOT entangling gates), followed by measurement and postprocessing steps.
possible beneficial properties of VQCs such as bet-
ter trainability and generalization (Abbas et al., 2021;
Banchi et al., 2021) can be transferred to RL algo-
rithms. In this branch of research, quantum advantage
has already been shown on an artificial benchmark
(Jerbi et al., 2021). Recent works have mainly fol-
lowed the architecture and hyperparameter choices of
previous publications (Jerbi et al., 2021; Skolik et al.,
2022), albeit these choices have been insufficiently in-
vestigated, making additional empirical studies nec-
essary.
While the majority of QRL literature focuses
on algorithms for environments with discrete ac-
tion spaces, Wu et al. proposed a QRL solution
for quantum continuous action space (CAS) environ-
ments (Wu et al., 2020). While Acuto et al. model
QRL agents on classical CAS environments (Acuto
et al., 2022), they still use additional NNs as post-
processing layers. This approach makes it difficult to
distinguish between the contribution of quantum and
classical part of the algorithm. Another open ques-
tion for VQC-based QRL is therefore the adaptation
to CAS environments without the use of additional
classical NNs.
Based on the identified gaps in literature on the
construction of QRL algorithms and the design of
VQCs, our contributions are as follows: First, we
show how to design VQC-based QRL for classical
CAS environments without the use of additional NN
as pre- or postprocessing layers. Second, we investi-
gate VQC design choices by analysing the influence
of angle embedding, encoding block design and read-
out strategies on the performance of the agent, bench-
marked against two classical CAS OpenAI Gym en-
vironments, Pendulum-v1 and LunarLander-v2.
2 RELATED WORKS
In classical computing, one uses bits and strings of
bits to encode information in one of two possible
states 0 or 1, whereas in quantum computing the ba-
sic unit of information is the quantum bit – or, for
short, the qubit. A qubit, opposed to a bit, can be
in an infinite amount of states and is usually repre-
sented as a superposition of two basis states. Qubits
are manipulated by quantum gates, which are oper-
ations that act on one or multiple qubits and trans-
form their state, changing their probabilities. A series
of multiple gates is called a quantum circuit, and if
some parameters of these gates are trainable, it be-
comes a VQC. In this work, we focus on the subfield
of QRL where the data is classical and the algorithm
uses a hybrid quantum-classical approach, which con-
tains VQCs as function approximators. The general
architecture of a VQC used in this work is depicted
in Fig. 1. It consists of three qubits, represented
by three horizontal lines, which are initialized in the
basis state |000⟩. On these qubits act a sequence of
quantum gates, indicated by the boxes on these lines,
which change the state of the qubits. The gates are
separated into three different blocks: A data encoding
block, which transforms qubits depending on the clas-
sical input, a variational block with trainable varia-
tional gates, and an entangling block, where two qubit
gates are used to entangle the qubits. Together the
three blocks form a layer, which can be repeated sev-
eral times. The repetition of a data encoding block in
a VQC is known as data reuploading. At the end of
the VQC, the qubits are measured and, if necessary, a
classical post-processing step is applied to adapt the
output of the measurement to the task at hand.
In the branch of QRL this work focuses on, classi-
cal RL algorithms are modified by replacing parts of
the computational process with VQCs. Among these
RL algorithms one can find deep Q-learning (Skolik
et al., 2022), policy gradient (Jerbi et al., 2021), as
well as Actor-Critic (AC) methods such as Proximal
Policy Optimization (PPO) (Dr
˘
agan et al., 2022). In
many works before and after the VQC a single NN
linear layer is used for data pre- and post-processing
(Acuto et al., 2022; Park et al., 2023).
Some works also focus on quantum environments:
the authors of (Wu et al., 2020) propose a quantum
Deep Deterministic Policy Gradient (DDPG) algo-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
394

rithm and apply it to a CAS task, namely the quan-
tum state generation. The solution is benchmarked
on one-qubit and two-qubit cases. While the algo-
rithm is successful, it is not presented how to adapt it
to a classical environment, i.e., how to embed the data
and interpret the measurements, which are the biggest
challenges of CAS environments.
3 QUANTUM ACTOR-CRITIC
As has been shown in previous works, Q-learning
(Skolik et al., 2022), Policy Gradient (Jerbi et al.,
2021) algorithms, as well as actor-critic algorithms
such as PPO (Dr
˘
agan et al., 2022) can be adapted to
VQC-based QRL. Building on the works of Dr
˘
agan
et al., in this section we show how to advance this ap-
proach to CAS environments without the need of ad-
ditional classical pre- or postprossesing layers. This
is especially important, since the class of problems
state-of-the-art QRL focuses on is still quite simple.
Differentiating between the contribution of quantum
and classical part of the algorithm can therefore pose
a difficult question. This is why we aim to reduce the
complexity of the classical pre- and postprocessing to
simple input- and output scalings, rather than entire
NN layers as has been previously proposed in QRL
solutions for CAS environments (Acuto et al., 2022;
Park et al., 2023).
The PPO algorithm consists of an actor and a
critic, which are each represented by one function ap-
proximator (classically a NN). The actor estimates the
policy function π
Θ
(s
t
), while the critic estimates the
value function V
Φ
(s
t
), both at a given state s
t
at time
step t.(in the following we drop the index t for sim-
plicity).
3.1 Quantum Actor for Continuous
Actions
In order to draw continuous actions from the policy
function π
Θ
(s), the output of the actor needs to be
reparameterized. To calculate the value of a given
continuous action a
i
, the function approximator of the
actor needs to compute two variables for each action,
namely the mean µ
i
and the variance σ
i
of a normal
distribution N from which the action a
i
is then drawn
a
i
∼ N (µ
i
,σ
i
).
We now consider the computation of the policy π
Θ
of the actor with a VQC as function approximator in-
stead of a NN. The actor VQC U
Θ
(s) is parameterized
by input scaling parameters λ
a
, variational parameters
θ and output scaling parameters w
µ
i
and w
σ
i
, where
Θ = (λ
a
,θ,w
µ
i
,w
σ
i
). To compute action a
i
as a fac-
torized Gaussian, the mean µ
i
and standard deviation
σ
i
are calculated based on the observables O
µ
i
and O
σ
i
as follows:
µ
i
= ⟨0
⊗n
|U
Θ
(s)
†
O
µ
i
U
Θ
(s)|0
⊗n
⟩·w
µ
i
(1)
and
σ
i
= exp
⟨0
⊗n
|U
Θ
(s)
†
O
σ
i
U
Θ
(s)|0
⊗n
⟩·w
σ
i
. (2)
Since O
µ
i
and O
σ
i
are arbitrary Pauli operators, the
output values for mean and variance can not scale be-
yond the interval of [-1, 1]. Therefore the classical
scaling parameters w
µ
i
and w
σ
i
are crucial in order to
apply VQC-based RL to classical CAS environments.
3.2 Quantum Critic for Value
Estimation
To retrieve the information for the value estimate of
the critic, we follow the approach of (Skolik et al.,
2022). Let U
Φ
(s) be the critic VQC parameterized
by Φ = (λ
c
,φ,w
O
v
i
)
, where analogously to the actor
VQC, λ
c
are the parameters used for input scaling, φ
are the variational parameters, and w
O
v
i
refers to the
output scaling parameters. Then the value of a given
state s is computed using Eq. 3
V
Φ
(s) =
n
∑
⟨0
⊗n
|U
Φ
(s)
†
O
v
i
U
Φ
(s)|0
⊗n
⟩·w
O
v
i
(3)
We obtain the value of V
Φ
(s) by either a single or a
sequence of observables O
v
i
acting on n qubits. We
introduce another scaling parameter w
O
v
i
, since the
value estimate of the critic also needs to scale beyond
the interval of [−1,1] for most RL tasks. In the fol-
lowing we discuss the choice of the number of VQC
layers n and demonstrate how its value, as well as the
choice of the observables, can greatly influence QRL
performance.
4 VARIATIONAL QUANTUM
CIRCUIT DESIGN
Due to the small number of empirical studies in the
field of QRL, the degrees of freedom in VQC design
choices are enormous. In this work we therefore need
to restrict our investigations: The basis of our analy-
sis will be the widely-used hardware efficient Ansatz
proposed by Jerbi et al. enhanced using data reu-
ploading as proposed by Skolik et al. (Jerbi et al.,
2021; Skolik et al., 2022). Our only modification
to this Ansatz will be the replacement of CZ entan-
gling gates with CNOT entangling gates. This is due
Variational Quantum Circuit Design for Quantum Reinforcement Learning on Continuous Environments
395
encoding block
variational block
entangling block
. . . . . .
q
0
. . . . . .
q
1
. . . . . .
q
2
. . . . . .
q
3
. . . . . .
q
4
. . . . . .
q
5
|0⟩
H
R
y
(s
0
· λ
i,0
) R
z
(s
0
· λ
i,6
) R
z
(θ
i,0
) R
y
(θ
i,6
)
µ
i
, σ
i
= f(q
0
, q
1
, . . . , q
5
)
|0⟩
H
R
y
(s
1
· λ
i,1
) R
z
(s
1
· λ
i,7
) R
z
(θ
i,1
) R
y
(θ
i,7
)
|0⟩
H
R
y
(s
2
· λ
i,2
) R
z
(s
2
· λ
i,8
) R
z
(θ
i,2
) R
y
(θ
i,8
)
|0⟩
H
R
y
(s
0
· λ
i,3
) R
z
(s
0
· λ
i,9
) R
z
(θ
i,3
) R
y
(θ
i,9
)
|0⟩
H
R
y
(s
1
· λ
i,4
) R
z
(s
1
· λ
i,10
) R
z
(θ
i,4
) R
y
(θ
i,10
)
|0⟩
H
R
y
(s
2
· λ
i,5
) R
z
(s
2
· λ
i,11
) R
z
(θ
i,5
) R
y
(θ
i,11
)
n layers
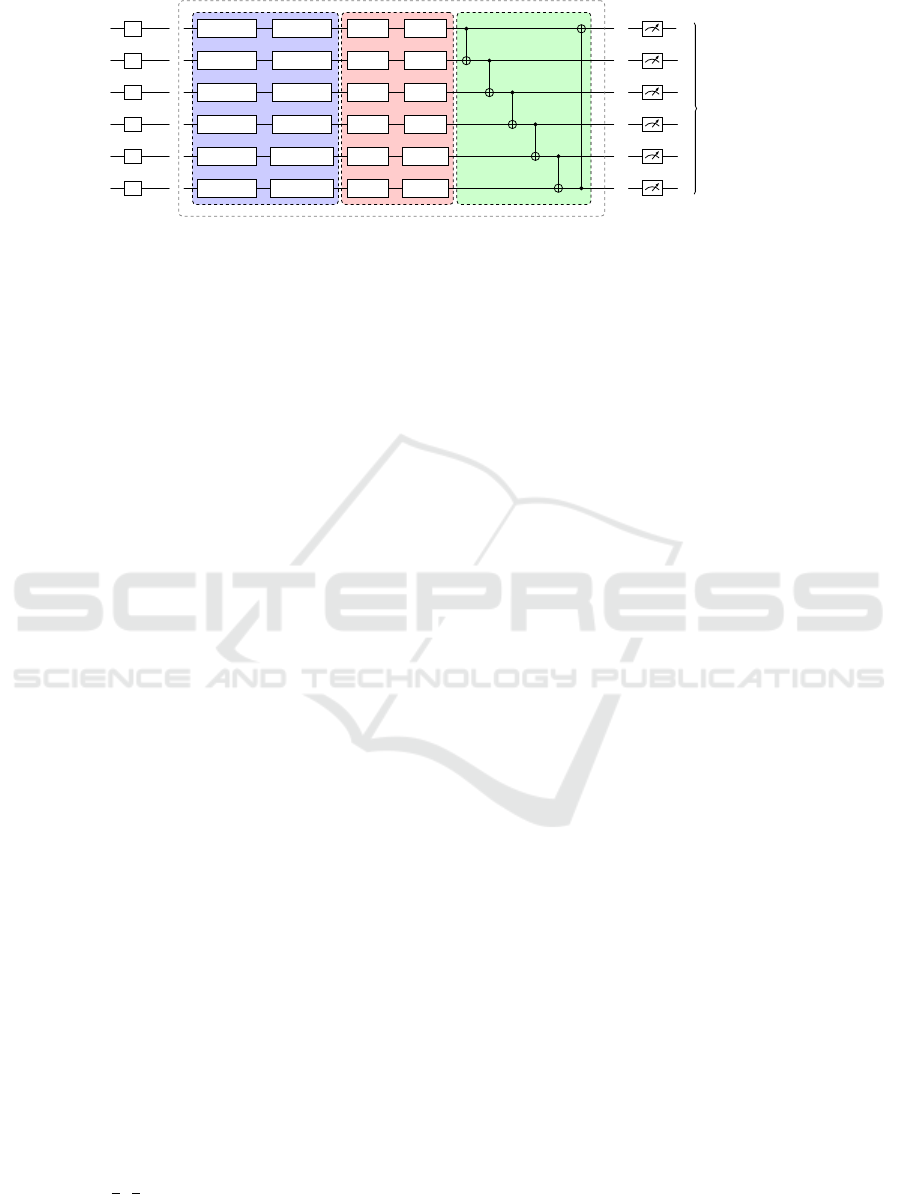
Figure 2: An example of a stacked VQC with six qubits applied for an environment with observation space of size three. The
encoding block is repeated (stacked) vertically two times such that each state feature s
i
is encoded twice on two distinct qubits
in each layer n. The other blocks follow the design of Fig. 1.
to the fact that chain CZ entanglement may lead to
large amounts of parameters which do not influence
the output of the VQC, as the number of qubits in-
creases.
The basic architecture of the used VQC is depicted
in Fig. 1. Each layer of the VQC consists of three
blocks: A data encoding block, a variational block
and an entangling block. After n such layers are con-
catenated, measurements are conducted, followed by
an additional postprocessing step. In this work we
investigate three design choices for this VQC. First,
we evaluate the influence of different preprocessing
steps on the classical state s used for angle embed-
ding. Second, we propose a new encoding block ar-
chitecture and benchmark it against the basic encod-
ing block. Third, we analyse the influence of different
observables and postprocessing steps on the training
performance.
4.1 Angle Embedding
Data encoding greatly influences the behaviour of
VQCs (Schuld et al., 2021). One of the ways the
classical environment state s can be encoded into a
quantum state suitable for a VQC is angle embedding.
This is done using one or more rotation gates (ref.
Fig. 1). Since these gates have a periodicity of 2π
while the observation space of a classical environment
can be outside this interval, various works have pro-
posed to encode each feature s
i
of the classical envi-
ronment state s as arctan(s
i
·λ
i
) (Skolik et al., 2022),
where λ
i
denotes a classical trainable scaling param-
eter. This encoding has the caveat that for classical
observation spaces with large absolute feature val-
ues, trigonometric transformations such as arctan and
sigmoid will make the features almost indistinguish-
able for the QRL agent. To overcome this caveat, we
propose to previously normalize the features s
i
to an
interval of [−
π
2
,
π
2
]. The normalized features ˆs
i
are en-
coded into the rotation gates as ˆs
i
·λ
i
, either with or
without an additional nonlinear transformation (ref.
Fig. 3).
4.2 Encoding Block
Previous works, which do not use additional NNs for
pre- or postprocessing, generally design the encoding
block of the VQC such that each feature of the ob-
servation space is encoded into one qubit using angle
embedding. This strategy limits the size of the VQC
to the observation space size of the task at hand, lim-
iting the potential of VQCs. This problem is accom-
panied by the fact that an increase of the number of
layers has previously been shown to improve train-
ing performance only until a certain threshold (Skolik
et al., 2022).
To overcome this issue we propose a novel data
encoding approach in order to increase the number of
exploitable qubits: Instead of encoding each feature
of the state s using angle embedding only once, we
stack s such that each feature is encoded several times.
An illustration of this stacked VQC is shown in Fig.
2. This architecture enables VQC-based QRL agents
to scale beyond the previous VQC sizes, potentially
enhancing their training capabilities due to a higher
amount of trainable parameters without the need of
additional layers.
4.3 Observables and Postprocessing
The choice of observables and postprocessing steps,
jointly referred to in this work as readout configura-
tion, has previously been shown to be crucial for the
performance of the agent on discrete learning tasks
(Meyer et al., 2023). Therefore, the choice of the ob-
servables O
µ
i
and O
σ
i
for the actor is investigated in
this work.
For the actor VQC, we compare single qubit ob-
servables for the mean O
µ
i
= Z
i
and variance O
σ
i
=
Z
i+1
, where Z
i
are Pauli-Z operators on the respective
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
396
0 50000 100000 150000 200000 250000 300000 350000 400000
environment steps
−1400
−1200
−1000
−800
−600
−400
−200
reward
P endulum
s
i
· λ
i
arctan(s
i
· λ
i
)
arctan(s
i
) ·λ
i
sigmoid(s
i
· λ
i
)
sigmoid(s
i
) ·λ
i
(a) 3 qubits, 3 layers, M
1
readout, no normalization.
0 100000 200000 300000 400000 500000 600000 700000 800000
environment steps
−300
−200
−100
0
100
200
reward
LunarLander
s
i
· λ
i
arctan(s
i
· λ
i
)
arctan(s
i
) ·λ
i
sigmoid(s
i
· λ
i
)
sigmoid(s
i
) ·λ
i
(b) 6 qubits, 6 layers, M
1
readout, no normalization.
0 50000 100000 150000 200000 250000 300000 350000 400000
environment steps
−1200
−1000
−800
−600
−400
−200
reward
P endulum
ˆs
i
· λ
i
arctan(ˆs
i
· λ
i
)
arctan(ˆs
i
) ·λ
i
sigmoid(ˆs
i
· λ
i
)
sigmoid(ˆs
i
) ·λ
i
(c) 3 qubits, 3 layers, M
1
readout, with normalization.
0 100000 200000 300000 400000 500000 600000 700000 800000
environment steps
−300
−200
−100
0
100
200
reward
LunarLander
ˆs
i
· λ
i
arctan(ˆs
i
· λ
i
)
arctan(ˆs
i
) ·λ
i
sigmoid(ˆs
i
· λ
i
)
sigmoid(ˆs
i
) ·λ
i
(d) 6 qubits, 6 layers, M
1
readout, with normalization.
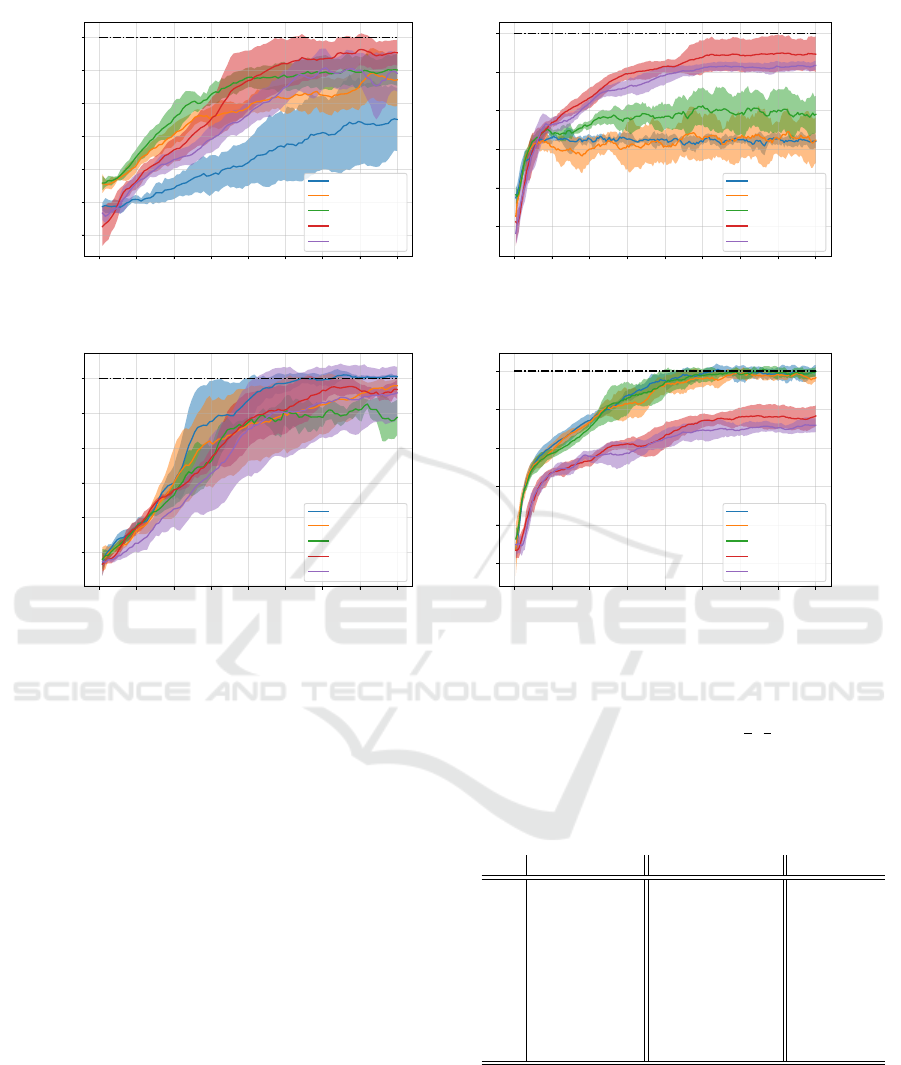
Figure 3: Evaluation of encoding strategies: Each angle embedding consists of rotation gates R
y
and R
z
(ref. Fig. 1) and
the same readout M
1
(compared in Fig. 5) is used for all runs. The target reward of the environments are indicated by the
dotted black line. In Fig. 3a and 3b the training curves for Pendulum-v1 and LunarLander-v2 are depicted without a previous
normalization of the state s. In Fig. 3c and 3d the state s is previously normalized to an interval of [−
π
2
,
π
2
]. Each solid line
represents the mean of five seeds, the shaded area indicates the standard deviation.
qubit. We compare these single-qubit observables to
multi-qubit observables, as well as to a combination
of the two approaches (ref. Tab. 1). Since the expec-
tation value of the unscaled observables O
µ
i
and O
σ
i
lie in [−1, 1], while the continuous action space of a
given environment can potentially lie in (−∞, ∞), we
use one trainable parameter w
i
for each observable as
postprocessing step. Previous work has already ana-
lyzed the impact of non-trainable scaling parameters
for Q-learning (Skolik et al., 2022), so we will not
investigate this design choice here.
For the critic, the observable O
v
i
is either a single
Pauli-Z operator on the first qubit, the sum of single
Pauli-Z operators on all qubits or a multi qubit mea-
surement on all qubits. As postprocessing step we in-
troduce for each respective expectation value a train-
able scaling parameter w
i
. In the following we investi-
gate the impact of different readout configurations M
- with varying observables and postprocessing steps -
on the training performance of the QRL agent.
Table 1: Table of all readout configurations M
1
to M
7
in Fig
5, where i is the index of the action a
i
and j is the index of
the qubit.
O
µ
i
O
σ
i
O
v
M
1
Z
i
w
µ
i
Z
i+1
w
σ
i
∑
(Z
j
·w
v
j
)
M
2
Z
i
w
µ
i
Z
i+1
w
σ
i
Z
0
·w
v
0
M
3
Z
i
w
µ
i
Z
i+1
w
σ
i
∏
(Z
j
) ·w
v
0
M
4
Z
i
Z
i+1
w
µ
i
Z
i+2
w
σ
i
∑
(Z
j
·w
v
j
)
M
5
Z
i
Z
i+1
w
µ
i
Z
i+2
w
σ
i
Z
0
·w
v
0
M
6
Z
i
Z
i+1
w
µ
i
Z
i+2
w
σ
i
∏
(Z
j
) ·w
v
0
M
7
Z
i
Z
i+1
Z
i+2
w
µ
i
Z
i+3
Z
i+4
Z
i+5
w
σ
i
∑
(Z
j
·w
v
j
)
M
8
Z
i
Z
i+1
Z
i+2
w
µ
i
Z
i+3
Z
i+4
Z
i+5
w
σ
i
Z
0
·w
v
0
M
9
Z
i
Z
i+1
Z
i+2
w
µ
i
Z
i+3
Z
i+4
Z
i+5
w
σ
i
∏
(Z
j
) ·w
v
0
5 NUMERICAL RESULTS
In this section we analyze the influence of the VQC
design choices on two CAS environments with dif-
ferent observation space sizes, action space sizes and
Variational Quantum Circuit Design for Quantum Reinforcement Learning on Continuous Environments
397
0 50000 100000 150000 200000 250000 300000
environment steps
−1200
−1000
−800
−600
−400
−200
reward
P endulum
1 layer
3 layers
5 layers
7 layers
(a) 3 qubits, ˆs
i
·λ
i
encoding, M
1
readout.
0 50000 100000 150000 200000 250000 300000
environment steps
−1200
−1000
−800
−600
−400
−200
reward
P endulum
1 layer
3 layers
5 layers
7 layers
9 layer
12 layers
(b) 6 qubits, ˆs
i
·λ
i
encoding, M
1
readout.
0 50000 100000 150000 200000 250000 300000
environment steps
−1200
−1000
−800
−600
−400
−200
reward
P endulum
1 layer
5 layers
9 layer
15 layers
21 layers
(c) 9 qubits, ˆs
i
·λ
i
encoding, M
1
readout.
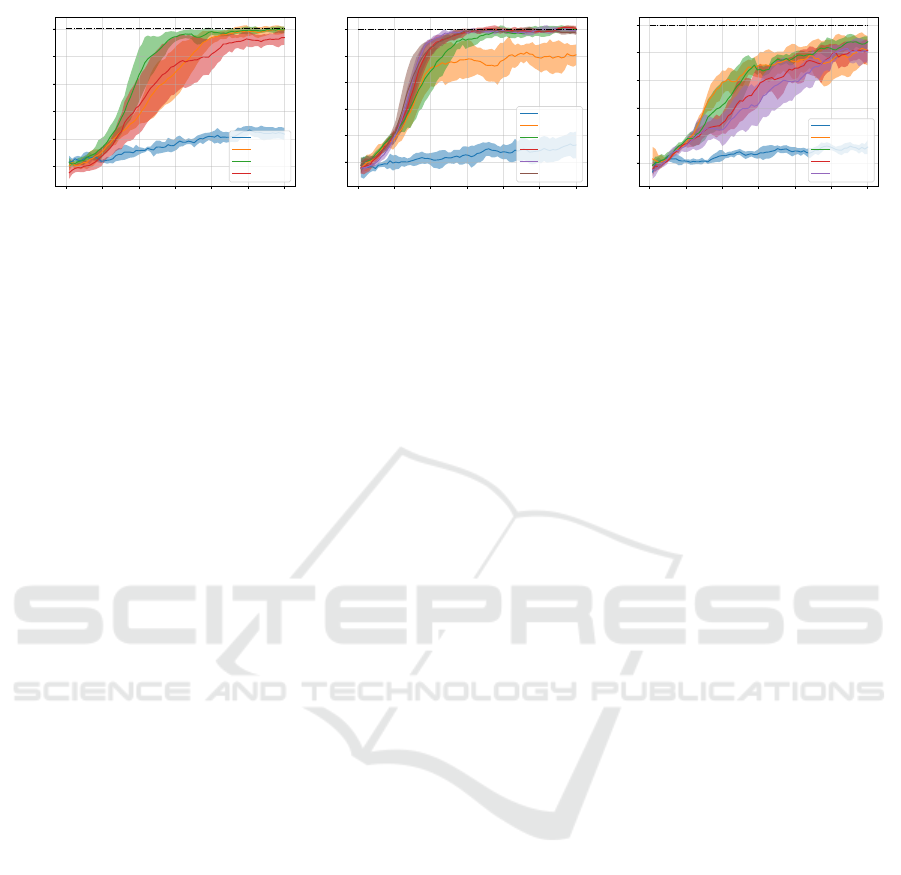
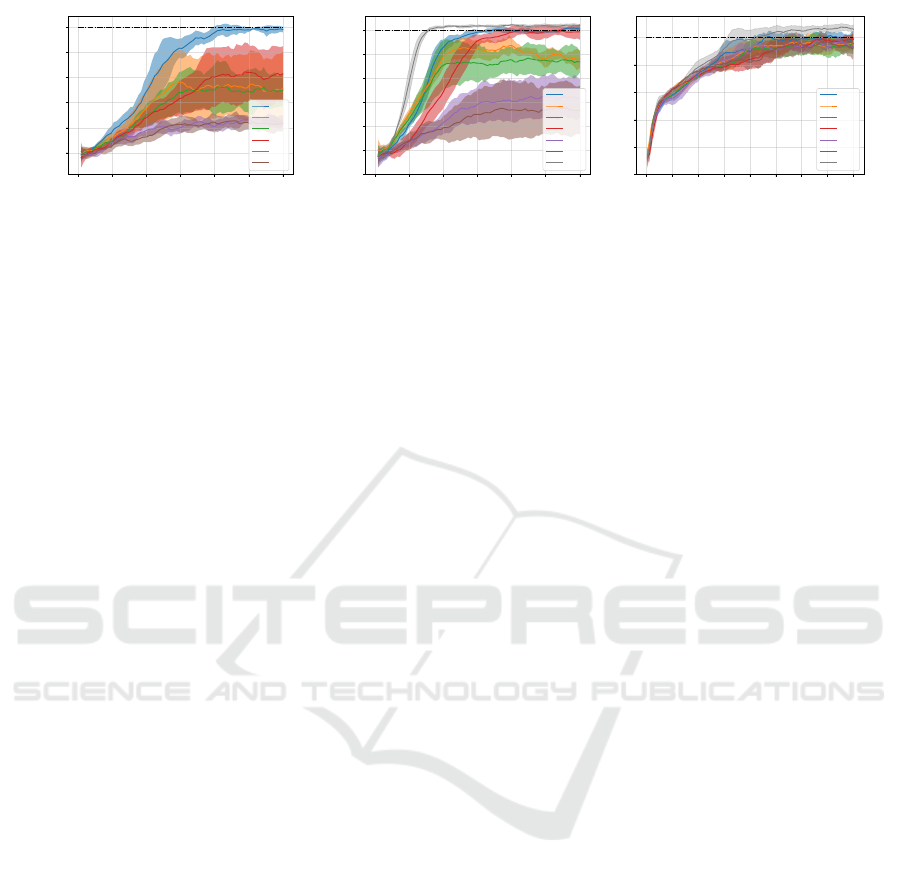
Figure 4: Comparison of different VQC encoding block sizes: In all runs the same angle embedding ( ˆs
i
·λ
i
) and readout (M
1
,
ref. Tab. 1) is used. The state features s
i
are encoded one, two or three times in Fig. 4a, 4b and 4c respectively as depicted in
Fig. 2. Each solid line represents the mean of five seeds, the shaded area indicates the standard deviation.
difficulties: The Pendulum-v1 environment with ob-
servation space of size three and one continuous ac-
tion and the LunarLander-v2 environment with ob-
servation space of size eight and two continuous ac-
tions. On Pendulum-v1, we benchmark VQCs with 3,
6 and 9 qubits and evaluate different design choices.
On LunarLander-v2, we select the 6 most informative
features of the 8 features of the observation space.
This is because for the used VQC architecture, the
variance of the expectation values of the observables
starts to vanish quickly, hindering training already at
eight qubits.
5.1 Angle Embedding
In Fig. 3 various angle embedding strategies are eval-
uated on the two environments. In Figs. 3a and 3b, the
state features s
i
are encoded into two rotation gates R
y
and R
z
using arctan or sigmoid functions and scaling
parameters λ
i
. None of these encodings enable the
VQC-based QRL agents to solve the environments.
On both benchmarks the best performing agents uti-
lize a sigmoid(s
i
·λ
i
) encoding, but nevertheless fail
to reach the target rewards.
In classical RL, input states are generally normal-
ized to the interval of [−1,1] in order to enhance train-
ing performance. Following this idea of previous nor-
malization of states, in Fig. 3c and 3d s
i
is previously
normalized to the interval of [−π/2,π/2] to ˆs
i
. In Fig.
3c it can be seen that the encoding without any nonlin-
ear function scaling outperforms all other encodings,
while in Fig. 3d the encodings using arctan functions
perform similarly well.
While the use of nonlinear functions such as
arctan and sigmoid is widely spread across literature,
we show that they do not enhance training perfor-
mance, but instead can even lead to poorer results.
Instead, simple normalization as utilized in classical
RL, combined with a trainable parameter for each in-
put feature shows the best performance across runs.
Hence, in the further comparison, the encoding ˆs
i
·λ
i
is used and referred to as basic encoding.
5.2 Encoding Block
Previous works, which do not use additional NNs for
pre- or postprocessing, have always used a VQC of
the same size as the observation space of the classi-
cal environment. In order to evaluate the usage of
different sized encoding blocks, in Figs. 4 we com-
pare the training performance on Pendulum-v1 with
a 3, 6 and 9 qubit VQC, where each feature of the
state s is encoded one, two and three times respec-
tively (ref. Fig. 2). All VQCs fail to train with a
single layer, even though the amount of trainable pa-
rameters in the variational block increases from 6 to
12 and 18. As data reuploading is introduced by us-
ing more than one layer, training performance is im-
proved across all architectures. But simply introduc-
ing more parameters by adding more layers has previ-
ously been shown to only improve performance until
a certain threshold (Skolik et al., 2022). This can be
seen in Fig. 4a, where performance reaches a peak at
five layers. Skolik et al. suggest that this behaviour
occurs because at a certain number of layers, training
begins to be hindered due to overparameterization of
the VQC. Interestingly, the amount of layers required
for successful training increases with the amount of
qubits: For larger VQCs with six qubits best perfor-
mance is observed for nine layers (Fig. 4b), while
the nine qubit VQC fails to solve the environment in
the given time frame (Fig. 4c). Therefore, overpa-
rameterization can not be interpreted as an absolute
number of trainable parameters, but rather depends on
the number of qubits used: Our results indicate that
greater qubit numbers also require greater numbers of
trainable parameters.
It has been previously shown that for small VQCs
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
398
0 50000 100000 150000 200000 250000 300000
environment steps
−1200
−1000
−800
−600
−400
−200
reward
P endulum
M
1
M
2
M
3
M
4
M
5
M
6
(a) 3 qubits, 5 layers, ˆs
i
·λ
i
encoding.
0 50000 100000 150000 200000 250000 300000
environment steps
−1400
−1200
−1000
−800
−600
−400
−200
reward
P endulum
M
1
M
2
M
3
M
7
M
8
M
9
NN
(b) 6 qubits, 7 layers, ˆs
i
·λ
i
encoding.
0 100000 200000 300000 400000 500000 600000 700000 800000
environment steps
−300
−200
−100
0
100
200
reward
LunarLander
M
1
M
2
M
3
M
4
M
5
M
6
NN
(c) 6 qubits, 7 layers, ˆs
i
·λ
i
encoding.
Figure 5: Comparison of readout configurations (ref. Tab. 1) and benchmarking against best performing NNs: In Fig. 5b and
5c the black lines indicate the best performing classical NN with two hidden layers with 64 neurons each and ReLU activation
functions based on the hyperparameter search. Each solid line represents the mean of five seeds, the shaded area indicates the
standard deviation.
the amount of trainable parameters required for suc-
cessful training is lower than for classical NNs
(Dr
˘
agan et al., 2022). Our findings suggest that this
phenomenon is restricted to small VQCs and does not
apply to larger VQCs. Moreover, the vanishing gradi-
ents start to hinder training already at nine qubits (ref.
Fig. 4c).
5.3 Observables and Postprocessing
In Fig. 5 the influence of different choices of ob-
servables and postprocessings for actor and critic is
shown. The different readout configurations are listed
in Tab. 1. On the Pendulum-v1 environment the
choice of observable is crucial for the success of train-
ing (Fig. 5a). The M
1
readout configuration is the
only configuration which leads to successful training
with a three qubit VQC. Also in Fig. 5b, the M
1
read-
out performs best for the stacked VQC, followed by
M
7
, the only other configuration leading to successful
training. Finally, in Fig. 5c different readout configu-
rations for LunarLander-v2 are shown. Here no clear
trend can be observed.
Our results show that observables and postpro-
cessing steps can be crucial for training performance
in some cases, while in others barely influence the
performance of the agents. Only the M
1
readout con-
figuration has no negative influence across all experi-
ments.
5.4 Benchmark Against Classical
Agents
Finally we perform an extended hyperparameter
search for the classical RL agents and benchmark the
best performing classical RL agents against the QRL
agents in Figs. 5b and 5c. We evaluated 117 dif-
ferent classical agents for Pendulum-v1 and 36 for
LunarLander-v2. On both benchmarks the best per-
forming NNs have two hidden layers with 64 neu-
rons each and ReLU activation functions, resulting in
4416 and 4736 trainable parameters on the two bench-
marks, while the QRL agents have 176 and 178 train-
able parameters. On one hand, the performance gap
could be explained by the difference of the number of
trainable parameters. On the other hand, it remains
to be shown if the beneficial properties such as bet-
ter trainability (Abbas et al., 2021) and generalization
(Banchi et al., 2021) also hold for larger VQCs with
comparable amounts of trainable parameters.
6 CONCLUSIONS
In this work we showed how to construct a quantum
reinforcement learning agent for classical environ-
ments with continuous action spaces based on a hy-
brid quantum-classical algorithm that employs vari-
ational quantum circuits as function approximators.
Our approach does not require any additional classi-
cal neural network layers as pre- or postprocessing
steps. Instead, only trainable scaling parameters are
required in order to adapt the output of the variational
quantum circuit to the size of the continuous action
space.
Additionally, we investigated several variational
quantum circuit design choices with respect to their
influence on training performance. While nonlin-
ear functions such as arctan have been widely used
throughout quantum reinforcement learning literature
for angle embedding, we show in our experiments that
such functions actually hinder training performance.
Instead, normalization - in combination with trainable
scaling parameters - yields the best training results.
The number of qubits of previous designs of vari-
ational quantum circuits was limited to the size of the
Variational Quantum Circuit Design for Quantum Reinforcement Learning on Continuous Environments
399

observation space due to angle embedding. We pro-
posed a new encoding block architecture - stacked
VQC - which allows the utilization of additional
qubits, resulting in improved training performance.
It has been previously shown that an increase of the
number of layers improves training performance only
until a threshold (Skolik et al., 2022). We reveal a
similar trend: an increase of the number of qubits
substantially improves training performance, but also
only until a certain limit. Our work indicates that
current VQC architectures therefore are limited both
in the number of layers, as well as in the amount of
qubits, and thus dictate both the depth and the width
of the circuit, respectively. While we investigated and
enhanced current variational quantum circuit design
choices, future work should aim to further improve
upon these results as well as explore novel circuit ar-
chitectures in order to bridge the performance gap be-
tween QRL and RL.
ACKNOWLEDGEMENTS
The research is part of the Munich Quantum Valley,
which is supported by the Bavarian state government
with funds from the Hightech Agenda Bayern Plus.
REFERENCES
Abbas, A., Sutter, D., Zoufal, C., Lucchi, A., Figalli, A.,
and Woerner, S. (2021). The power of quantum neural
networks. Nature Computational Science, 1(6):403–
409.
Acuto, A., Barilla, P., Bozzolo, L., Conterno, M., Pavese,
M., and Policicchio, A. (2022). Variational quantum
soft actor-critic for robotic arm control. arXiv preprint
arXiv:2212.11681.
Banchi, L., Pereira, J., and Pirandola, S. (2021). Gener-
alization in quantum machine learning: A quantum
information standpoint. PRX Quantum, 2(4):040321.
Benedetti, M., Garcia-Pintos, D., Perdomo, O., Leyton-
Ortega, V., Nam, Y., and Perdomo-Ortiz, A. (2019). A
generative modeling approach for benchmarking and
training shallow quantum circuits. npj Quantum In-
formation, 5(1).
Caro, M. C., Huang, H.-Y., Cerezo, M., Sharma, K., Sorn-
borger, A., Cincio, L., and Coles, P. J. (2022). Gener-
alization in quantum machine learning from few train-
ing data. Nature Communications, 13(1).
Dalzell, A. M., McArdle, S., Berta, M., Bienias, P., Chen,
C.-F., Gily
´
en, A., Hann, C. T., Kastoryano, M. J.,
Khabiboulline, E. T., Kubica, A., Salton, G., Wang, S.,
and Brand
˜
ao, F. G. S. L. (2023). Quantum algorithms:
A survey of applications and end-to-end complexities.
Dr
˘
agan, T.-A., Monnet, M., Mendl, C. B., and Lorenz, J. M.
(2022). Quantum reinforcement learning for solv-
ing a stochastic frozen lake environment and the im-
pact of quantum architecture choices. arXiv preprint
arXiv:2212.07932.
Du, Y., Hsieh, M.-H., Liu, T., and Tao, D. (2020). Expres-
sive power of parametrized quantum circuits. Phys.
Rev. Res., 2:033125.
Jerbi, S., Gyurik, C., Marshall, S., Briegel, H., and Dunjko,
V. (2021). Parametrized quantum policies for rein-
forcement learning. Advances in Neural Information
Processing Systems, 34:28362–28375.
McClean, J. R., Boixo, S., Smelyanskiy, V. N., Babbush,
R., and Neven, H. (2018). Barren plateaus in quantum
neural network training landscapes. Nature Commu-
nications, 9(1).
Meyer, N., Scherer, D., Plinge, A., Mutschler, C., and Hart-
mann, M. (2023). Quantum policy gradient algorithm
with optimized action decoding. In International Con-
ference on Machine Learning, pages 24592–24613.
PMLR.
Meyer, N., Ufrecht, C., Periyasamy, M., Scherer, D. D.,
Plinge, A., and Mutschler, C. (2022). A survey on
quantum reinforcement learning.
Park, S., Kim, J. P., Park, C., Jung, S., and Kim, J. (2023).
Quantum multi-agent reinforcement learning for au-
tonomous mobility cooperation. IEEE Communica-
tions Magazine.
P
´
erez-Salinas, A., Cervera-Lierta, A., Gil-Fuster, E., and
Latorre, J. I. (2020). Data re-uploading for a universal
quantum classifier. Quantum, 4:226.
Qian, Y., Wang, X., Du, Y., Wu, X., and Tao, D. (2022). The
dilemma of quantum neural networks. IEEE Transac-
tions on Neural Networks and Learning Systems.
Schuld, M., Sweke, R., and Meyer, J. J. (2021). Effect of
data encoding on the expressive power of variational
quantum-machine-learning models. Physical Review
A, 103(3):032430.
Skolik, A., Jerbi, S., and Dunjko, V. (2022). Quantum
agents in the gym: a variational quantum algorithm
for deep q-learning. Quantum, 6:720.
Wu, S., Jin, S., Wen, D., and Wang, X. (2020). Quantum
reinforcement learning in continuous action space.
arXiv preprint arXiv:2012.10711.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
400
