
Military Badge Detection and Classification Algorithm for Automatic
Processing of Documents
Charith Gunasekara
1 a
, Yash Matharu
2 b
and Rohan Ben Joseph
3 c
1
Department of National Defence, Government of Canada, Ottawa, ON, Canada
2
Faculty of Engineering, McMaster University, Hamilton, ON, Canada
3
Department of Computing Science, Simon Fraser University, Burnaby, BC, Canada
Keywords:
Computer Vision, Object Detection, Document Classification, YOLOv5.
Abstract:
This paper outlines a robust approach to automate the detection of military badges on official government
documents utilizing YOLOv5 computer vision model. In an era where the rapid classification and management
of sensitive documents is paramount, developing a system capable of accurately identifying and classifying
distinct badge types plays a crucial role in supporting data management and security protocols. To address
the challenges posed by the lack of accessible, real-world government and military documents for research,
we introduced a novel method to simulate training data. We employ a technique that automates the data
labelling process, facilitating the generation of a comprehensive and versatile dataset while eliminating the
risk of compromising sensitive information. Through careful model training and hyper-parameter tuning, the
YOLOv5 model demonstrated exemplary performance, successfully detecting a wide spectrum of badge types
across various documents.
1 INTRODUCTION
The sheer volume of documents generated presents
a unique challenge in large-scale organizations such
as governmental departments and the military. Tradi-
tional manual methods of document classification are
not only labour-intensive but also time-consuming. In
the pursuit of efficiency, there’s a growing trend to-
wards automation. However, this path isn’t devoid of
challenges. For one, access to open data for research
is restricted, often due to strict organizational security
policies. This limits the potential to utilize vast inter-
nal datasets for training sophisticated machine learn-
ing models (Brown, 2010). Such constraints are in-
deed a missed opportunity, especially when machine
learning algorithms have showcased proficiency in
tasks demanding domain knowledge and uncompro-
mising attention (Orosz et al., 2022).
The appeal of document classification through
machine learning is evident, yet earlier attempts in
this direction often stumbled due to data scarcity and
the tedious nature of data labelling (Song et al., 2019)
a
https://orcid.org/0000-0002-7213-883X
b
https://orcid.org/0009-0003-8635-4239
c
https://orcid.org/0000-0001-8069-5874
(Ciecierski and Kamola, 2020) (Huber-fliflet et al.,
2019). In a novel approach, (Chiu et al., 2010) lever-
aged Optical Character Recognition (OCR) for ex-
tracting textual content and employed the Normalized
Cuts algorithm for clustering non-textual pixels. Al-
though innovative, this methodology was heavily re-
liant on manually labelled data, reducing its scalabil-
ity.
A unique approach was introduced by (Kallem-
pudi et al., 2022), who proposed the ”Soft Teacher”
mechanism. This semi-supervised pipeline catered
to graphical object detection within scanned docu-
ment images, even when working with limited la-
belled data. Similarly, (Arvind, 2023) integrated OCR
for keyword vector selection in classifying govern-
ment documents. Yet, their endeavours were limited
by training data, a recurring issue predominantly due
to access restrictions. Delving deeper into automating
document feature recognition, (Forczma
´
nski et al.,
2020) showcased a technique that employed Convolu-
tional Neural Networks (CNN) to automatically seg-
ment various elements, such as logos, stamps, and
text blocks, from paper documents. Their CNN-
centric approach was validated as superior when com-
pared with the conventional cascade-based detection
method.
Gunasekara, C., Matharu, Y. and Ben Joseph, R.
Military Badge Detection and Classification Algorithm for Automatic Processing of Documents.
DOI: 10.5220/0012351300003654
Paper copyright by his Majesty the King in Right of Canada as represented by the Minister of National Defence
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 723-731
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
723

A significant paradigm shift in the realm of ob-
ject detection was heralded by the birth of the You
Only Look Once (YOLO) algorithm (Redmon et al.,
2016). YOLO, and its subsequent iterations showed
the first one-stage detection mechanism in the deep
learning, outclassing many existing algorithms in ac-
curacy and speed (Zou et al., 2023). Though alter-
native one-stage object detection models like RestNet
have been explored, especially for tasks like logo de-
tection (Sarwo et al., 2019), YOLO is still leading in
terms of efficiency (Deng et al., 2023). Building on
YOLO’s foundation, (Bailey et al., 2022) crafted a
training dataset for bounding boxes tailored for var-
ied object detection. Meanwhile, (Rezkiani et al.,
2022) employed YOLOv4 to discern logos on uni-
versity diplomas, aiming for document classification.
However, the prevailing challenge remains the man-
ual labelling of objects and bounding boxes, which
inevitably makes the entire process labour-intensive.
Several versions of YOLO have been introduced since
its inception. Table 1 showcases the popularity of
each version through their respective Github stars.
While the newer version YOLOv8’s real advantage
comes in applications that require real-time object de-
tection, YOLOv5 is preferred for still object detection
primarily due to its robust Pytorch-based ecosystem
and extensive documentation support.
While advancements have been made in object de-
tection and document classification, a real gap ex-
ists regarding specialized domains like military and
governmental sectors. The lack of publicly available
data due to organizational security policies and man-
ual labour involved in creating training datasets in the
labelling and marking bounding boxes severely throt-
tles the speed and efficiency of the model training pro-
cess. When considering the volume of official doc-
uments generated daily, this poses a significant bot-
tleneck. We introduce an algorithm capable of au-
tonomously creating training datasets, eliminating the
requirement for manual labelling of data. By em-
ploying data augmentation techniques, our algorithm
generates synthetic dataset to replicate the features
and complexities of real-life scanned sensitive doc-
uments. This not only avoids labour-intensive manual
labelling but also paves the way for scalable and effi-
cient document classification in this domain.
2 RESEARCH METHODOLOGY
2.1 Data Collection
The overarching objective of this research is to
classify Canadian military documents based on the
Table 1: GitHub Popularity of YOLO Versions.
YOLO Version GitHub Stars in 1000s
YOLO v3 9.7
YOLO v4 21
YOLO v5 41.9
YOLO v6 5.2
YOLO v7 11.3
YOLO v8 13.2
badges imprinted on them. To achieve this, a com-
prehensive dataset was required to train our model ef-
ficiently. Utilizing existing documents with badges
for this purpose was not deemed practical due to two
primary concerns:
a) Training an image detection model effectively
mandates thousands of training samples for each
class. Manual labelling of such vast quantities of data
proves to be labour-intensive and time-consuming. b)
The pre-existing documents house sensitive informa-
tion, making them unsuitable for open research.
Given these limitations, the decision was made to
develop a mock dataset mirroring the patterns found
in these military documents. The process for con-
structing this mock dataset is detailed below:
1. Badge Compilation. An exhaustive collection was
undertaken of badges from various Canadian mili-
tary organizations to serve as our primary dataset.
2. Document Template Collection. We procured in-
ternal document templates and unfilled forms, en-
suring that they do not contain any sensitive infor-
mation. This provided us with the base structure
over which badges could be overlaid.
3. Mock Document Creation. A simulated set of
labelled documents was constructed using the
gathered badges and document templates. The
methodology adopted for pasting the badges onto
the documents involves a data augmentation algo-
rithm, elaborated in the subsequent section.
The abovementioned approach ensured the synthesis
of a robust dataset, eliminating risks associated with
using genuine documents and significantly reducing
manual labelling efforts. This mock dataset, we be-
lieve, will sufficiently represent the sophistication of
real-world military documents, aiding in the effective
training of our image detection model.
2.2 Data Pre-Processing and
Augmentation
In order to provide an effective training ground for
the YOLO5 model, we undertook extensive data pre-
processing and augmentation measures. Our dataset
combined both the badge and document datasets to
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
724
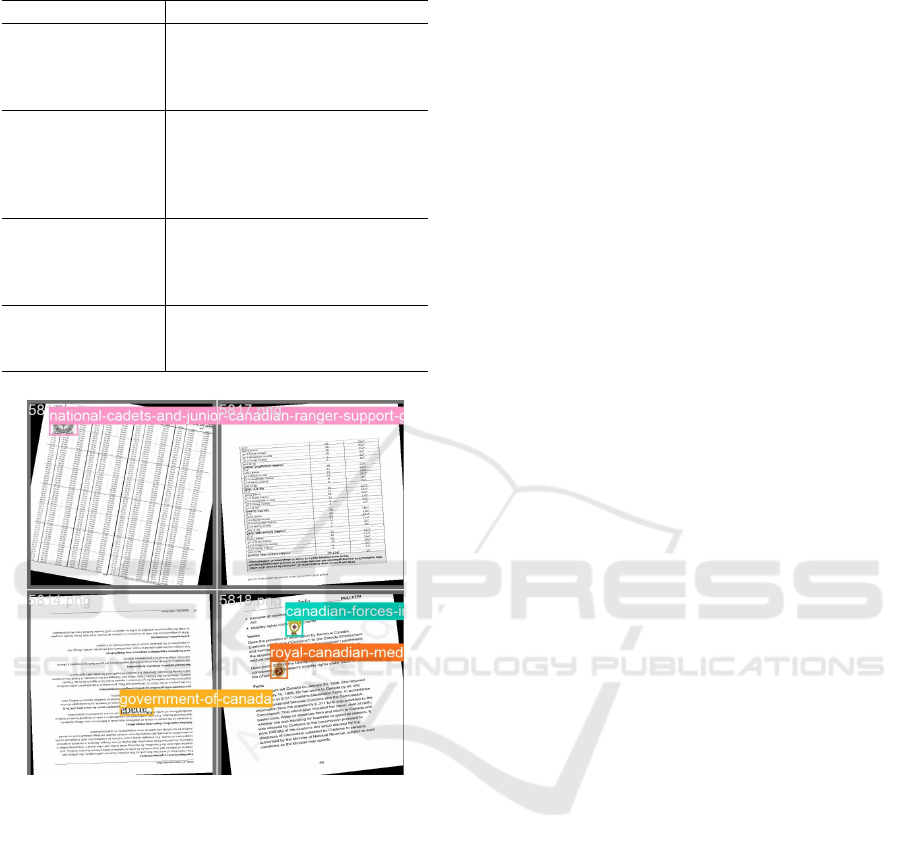
Table 2: Badge and Logo Data Sources and URLs.
Data Source URL
Gallery of Cana-
dian Force Badges
https://www.canada.ca/en/
services/defence/caf/military-
identity-system/canadian-
forces-badges.html
Government of
Canada Logo
https://www.international.gc.ca/
world-monde/assets/images/
funding-financement/canada-
aid-aide/canada-wordmark-
colour.jpg
National Defence
Logo
https://media.socastsrm.com/
wordpress/wp-content/
blogs.dir/1977/files/2021/05/
national-defence.png
DRDC Logo https://www.canada.ca/content/
dam/drdc-rddc/images/articles/
2021/drdc-logo.jpg
Figure 1: Sample dataset of generated images.
create an encompassing platform for model training.
Adhering to best practices as suggested by the YOLO
V5 model’s library, we established a target of at least
1,100 images per class. This culminated in a training
dataset with 55,400 labelled objects per class and a
subsequent validation set comprising 13,860 images
distributed evenly across all badge and logo classes.
We ensured the inclusion of images depicting var-
ied environmental conditions – from assorted lighting
scenarios to differing viewing angles and diverse im-
age sources like online scrapes, local collections, and
captures from various camera types.
To effectively train the model to adapt to real-
world conditions, each image underwent rigorous
processing:
1. Image Resizing. All images were resized to 640 x
640 pixels, the default resolution supported by the
YOLOv5 model.
2. Basic Augmentations. These included random
horizontal and vertical flips with a 50% probabil-
ity, along with random rotations in the range of
-15 to 15 degrees.
3. Badge Integration and Augmentation. Randomly
selected documents were resized to the default
YOLO V5 resolution. Then, anywhere from 0 to
10 badges were randomly selected and underwent
the aforementioned augmentations. Badge sizes
were varied (60 to 125 pixels width), with heights
adjusted to keep aspect ratios intact. Badge place-
ment was randomized within set coordinate limits,
ensuring varied placement within the document,
thereby exposing the model to a plethora of sizes
and placements.
4. Global Augmentations. The application of global
augmentations plays a crucial role in training
models, particularly in creating scenarios that
mimic real-world conditions. One common ap-
proach to enhance the robustness of a model is to
introduce Gaussian noise during the data augmen-
tation stage. This method helps in simulating vari-
ations and imperfections in real-world data. Dur-
ing the selection of augmentations, a balance be-
tween noise and accuracy was a critical consider-
ation.
Moderate introduction of Gaussian noise can
serve to regularize the model during training,
thereby improving its generalization capabilities.
It allows the model to become resilient to noise
and slight variations in the input data, poten-
tially reducing overfitting and enhancing accuracy
when evaluating the model with real-world im-
ages that naturally contain some noise. On the
contrary, a high level of Gaussian noise might de-
grade the model’s performance, making it difficult
for the model to learn meaningful patterns from
the data and possibly leading to increased error
rates.
• Gaussian Noise. Gaussian noise, with a sigma
(standard deviation) value of 0.5, was intro-
duced to mimic the common noise encountered
during the scanning of documents. A sigma
value of 0.5 was chosen to balance the introduc-
tion of noise for robustness while maintaining
the accuracy of object detection in the YOLO
model. This moderate level of noise ensures
that while the data contains variations, it does
not become unrecognizable. Thus, images with
moderate noise maintain semantic similarity to
the original, allowing the model to learn robust
features while managing real-world variations
Military Badge Detection and Classification Algorithm for Automatic Processing of Documents
725

(Liu et al., 2018),(Li and Ghosal, 2014).
• Gaussian Blur. Gaussian Blur was also utilized
to account for potential losses in detail or soft-
ening of edges that can occur during scanning.
That was implemented with a sigma value rang-
ing from 0.1 to 1 and used a kernel size of (3,
3). This approach ensures that the model can
adapt to potential variations in image sharp-
ness, thereby enhancing its performance with
varying image qualities (Suto, 2023). In Gaus-
sian blurring, the kernel size influences the ex-
tent of smoothing applied to the image, mak-
ing it an essential hyperparameter for tailoring
image processing tasks, balancing the ability of
the model to learn to interpret noisy and blurred
images against the preservation of important
features for the feature detectors to detect pat-
terns from hierarchically. The kernel size of (3,
3) in Gaussian blur operations signifies a rela-
tively small kernel, resulting in localized blur-
ring and preserving finer details in the image. It
denotes a 3x3 grid used for convolution, where
each pixel’s value is recalculated as an aver-
age of the neighbouring nine pixels, giving a
smoothing effect.
Maintaining consistency and accuracy in labelling
is crucial. Every image’s labelling was ensured to
be thorough and accurate, as partial labelling ham-
pers effective training. Background images without
objects were also incorporated into the dataset (repre-
senting 0-10% of the total) to reduce false positives.
Each processed image was saved in PNG (Portable
Network Graphics) format, signifying the culmina-
tion of both document and badge integration. Along-
side, a text file was generated to serve the YOLO
model, detailing badge locations in the format:
class_number, x_center, y_center, width, height
All coordinate values were adjusted to the image’s
dimensions for normalization purposes by dividing by
the 640-pixel width or height.
The program used for the dataset generation pro-
cess is explained in Algorithm 1.
2.3 Model Training
The essence of achieving optimal performance in
deep learning applications lies in the careful selection
and fine-tuning of hyperparameters, determining how
a model learns and adapts to given data. Our focus in
this section is to elucidate the training process for our
chosen YOLOv5 model.
Given our dataset’s size, we deemed it advanta-
geous to initiate our training using the pre-trained
Data: Total number of pages, dataset name
Result: Pages and text files saved to output
directory
initialization, Create maps for class number
to badge, and document number to
document filename;
for each page created do
Select random number of badges;
Select random document;
Load in document, resize to 640x640 and
augment by horizontally/vertically
flipping, and rotating;
Open a text filet;
for each badge do
Load in badge and augment by
horizontally/vertically flipping and
rotating;
Paste badge onto document;
Write to txt file class and coordinates;
end
Augment combined document + badge
page using gaussian noise and blur Save
page as PNG file
end
Algorithm 1: Algorithm for generating the dataset.
weights from YOLOv5’s default set. Such a decision
often aids in faster convergence, especially when data
volume is limited.
2.3.1 Hyper-Parameters
The summary of our chosen hyper-parameters and
their respective roles in the training process is given
below.
• Learning Rate. Our experiments were done us-
ing a learning rate of 0.02. The significance of this
hyper-parameter lies in the step size for updating
model parameters. Careful tuning is imperative to
avoid rapid divergence or protracted convergence.
• Batch Size. Ensuring efficient computation while
retaining model generalization, our batch size was
set at 16. This balances between computational
needs and the potential benefits of more frequent
model updates.
• Epochs. The number of epochs for the training
cycles was set to 55 to allow enough time for the
model to converge the loss functions to a mini-
mum value. At the same time, we monitored the
model performance with a validation set to ensure
it does not overfit.
• Optimizer Selection. Our model was trained us-
ing the Stochastic Gradient Descent (SGD) opti-
mizer, chosen for its synergy with Pytorch. SGD
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
726
is an iterative process where, at each step, a
subset of the training data (mini-batch) is used
to compute gradients and update model param-
eters. Accompanying hyperparameters, such as
momentum (set at 0.937) and weight decay (set at
0.0005), were carefully selected to influence the
optimizer’s behaviour, ensuring efficient conver-
gence.
• Architectural Regularizations. The dropout
rate, fixed at 0.5, ensured periodic deactivation of
neurons, enabling model robustness. Meanwhile,
batch normalization, with momentum set at 0.937,
contributed to training stability.
2.4 Training Environment
The model training was conducted on multiple GPUs
on a cloud-based virtual machine (VM) with the fol-
lowing specifications:
• RAM (Random Access Memory): 224GB
• CPUs (Central Processing Units): 12 virtual
CPUs (vCPUs)
• Generation: V2
• Architecture: 64-bit (x64)
• Operating System: Linux
• VRAM (Video RAM) per GPU (Graphics Pro-
cessing Units) : 24GB
• Number of GPUs: 2
• Temp storage (SSD(Solid State Drives)): 1474GB
• GPU memory: 32GB
• Max data disks: 24
• Max uncached disk throughput: 40000/400
(IOPS(Input/Output Operations Per Sec-
ond)/MBps(Megabytes Per Second))
• Max NICs (Network Interface Cards): 8
3 RESULTS
While training our models, we evaluated the model’s
performance on a separate validation dataset, which
comprised document objects unfamiliar to the models
from their training phase. The subsequent subsections
provide an in-depth analysis of the performance met-
rics obtained from this testing process.
3.1 Precision and Recall
Precision and recall are crucial indicators of a ma-
chine learning model’s performance in classification
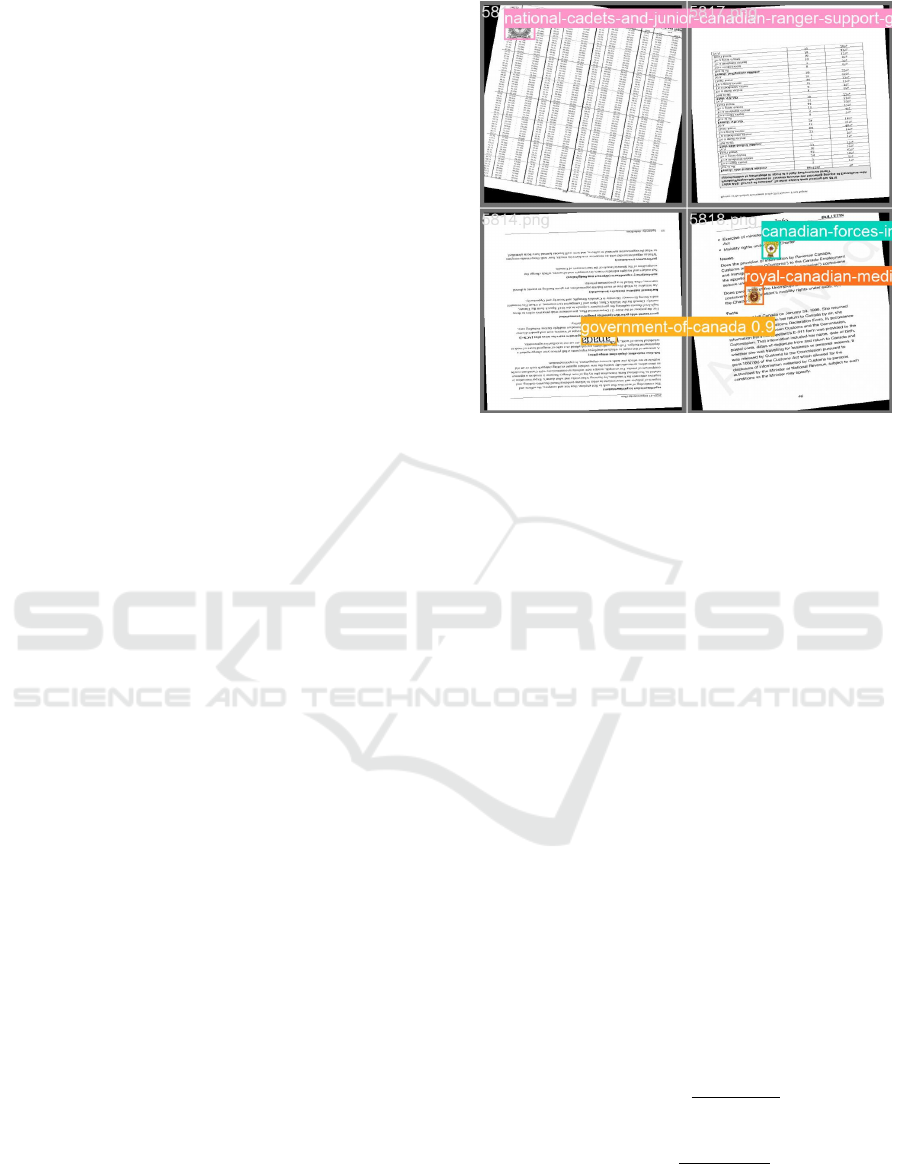
Figure 2: Sample dataset of predicted images.
tasks. While precision (Equation 1) gives us an in-
sight into the correctness of our model by measuring
the ratio of true positive (TP) predictions to the sum
of true positive (TP) and false positive (FP) predic-
tions, recall (Equation 2) on the other hand, highlights
the model’s ability to identify all relevant instances by
evaluating the ratio of true positive(TP) predictions to
the sum of true positive (TP) and false negative (FN)
predictions.
Through the graphical representations depicted in
Figure 3 for Precision vs. Epochs and Figure 4 for
Recall vs. Epochs, we can draw some insightful con-
clusions about the model’s behaviour over training
epochs. As seen in Figure 3, the precision values are
rising as the training epochs increase. Remarkably,
after the 10th epoch, the precision converges to an im-
pressive 99.5%. This connotes that our model, by this
stage, has honed its ability to predict true positives
with negligible false positive rates.
On the other hand, the recall values, as shown in
Figure 4, do demonstrate improvement as the training
progresses by converging to a score of 99.78%. This
suggests that while the model has become adept at
correctly classifying the positive cases, it still misses
out on some, leading to a higher number of false neg-
atives as compared to false positives.
Precision =
T P
(T P + FP)
(1)
Recall =
T P
(T P + FN)
(2)
Military Badge Detection and Classification Algorithm for Automatic Processing of Documents
727
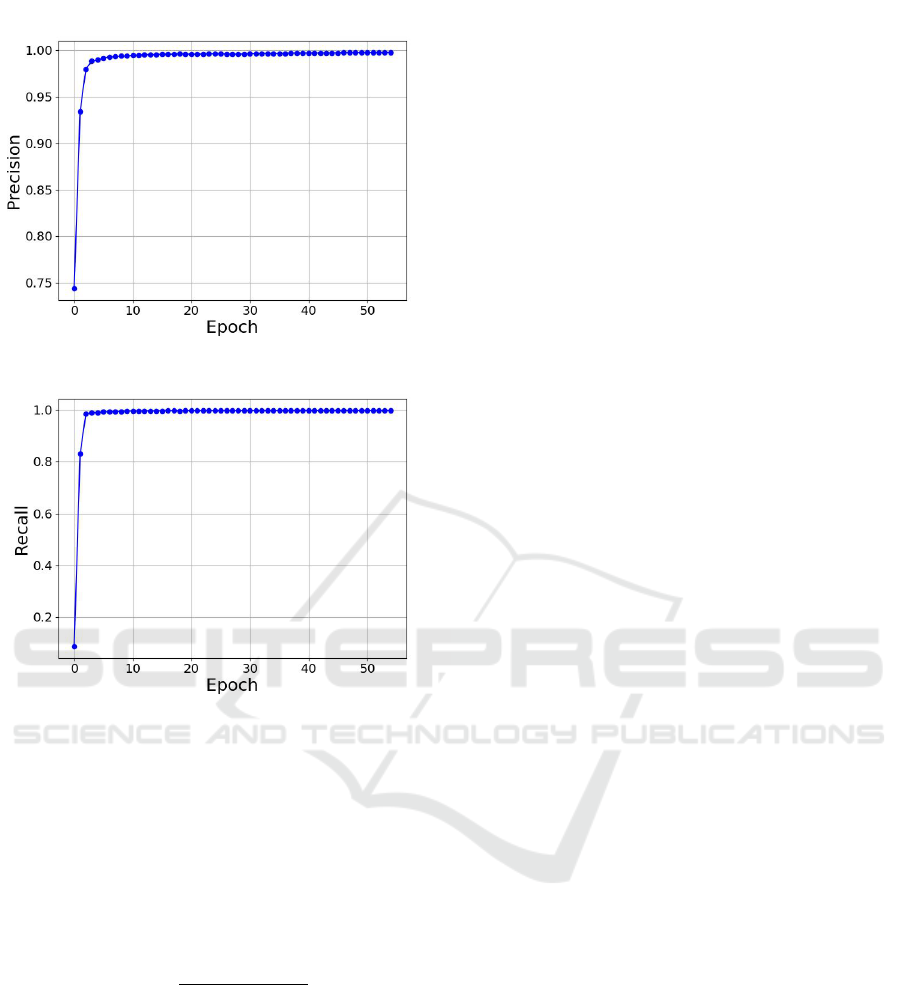
Figure 3: Precision vs Epochs Curve.
Figure 4: Recall vs Epochs Curve.
3.2 Intersection over Union (IoU)
Intersection over Union (IoU) The Intersection over
Union (IoU) provides a quantitative assessment of the
precision of predicted bounding boxes by measuring
their overlap with respective ground truth boxes. IoU
is obtained by computing the ratio of the area of in-
tersection to the area of union between the predicted
and true boxes.
IoU =
Area of Overlap
Area of Union
(3)
IoU values span from 0, representing no overlap, to 1,
indicative of a perfect match between the predicted
and actual bounding boxes. Employing IoU as a
threshold metric, accurate predictions are acknowl-
edged when the IoU surpasses a predetermined value.
As elaborated in section 3.3, the performance of
the model is evaluated using a threshold of 0.5, ensur-
ing at least 50% overlap of the predicted box with the
ground truth, and a spectrum of IoU thresholds from
0.5 to 0.95, inclusive of several intermediate values.
The average precision is calculated distinctly for each
threshold, followed by the computation of the mean.
The mAP 0.5:0.95 furnishes a holistic evaluation of
the model’s performance, encapsulating its efficacy
across many overlap scenarios. This is perceived as
a rigorous evaluation metric due to its imperative for
high accuracy across diverse IoU levels.
3.3 Mean Average Precision (mAP)
In object detection and classification, Mean Aver-
age Precision (mAP) is a vital metric aggregating
the model’s performance across different confidence
thresholds. It combines precision and recall effec-
tively, providing a holistic view of the model’s abil-
ity to identify objects and minimize false detections
correctly. The mAP score is calculated by taking the
average of the Average Precision (AP) values for each
class or category of objects. AP, in turn, is determined
by plotting the precision-recall curve for a specific
class and calculating the area under that curve. (Hen-
derson and Ferrari, 2017)
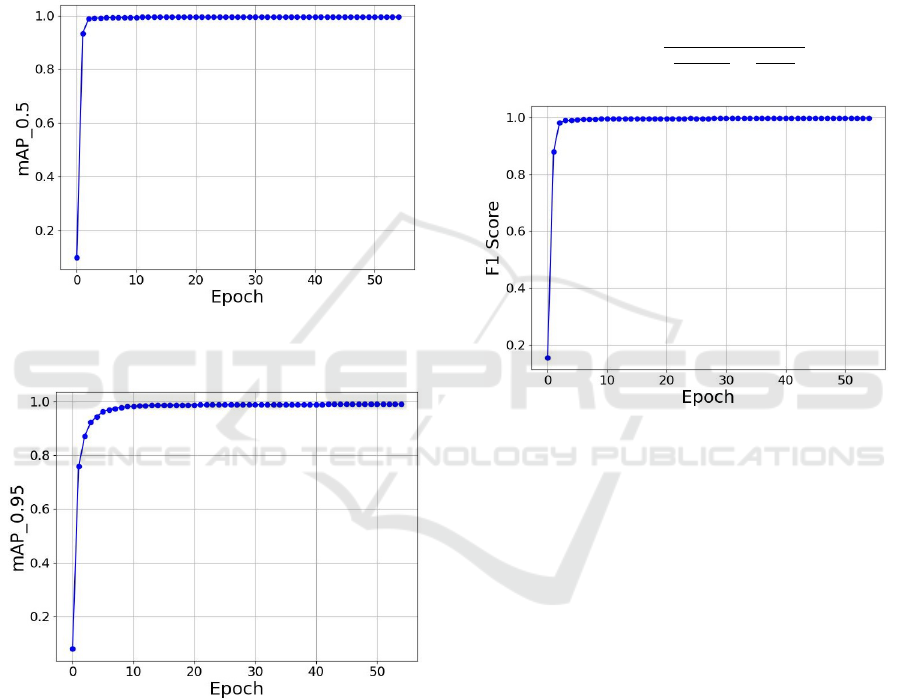
To better visualize our model’s performance
throughout training, we present the mAP curves in
Figures 5 and 6, illustrating how mAP values evolve
across training epochs. This graphical representation
aids in understanding the consistency and reliability
of our model in detecting document objects through-
out its training process.
The mAP’s progression over training epochs is
a strong indicator of the model’s learning trajectory.
a rising curve denotes a consistent enhancement in
object detection capabilities during the training pro-
cess. A mAP value inching closer to 1 indicates a
commendable performance, where the model adeptly
identifies badge regions while effectively managing
false positives and false negatives.
Mean Average Precision at Intersection over
Union 0.5 (mAP 0.5) (Figures 5 ): This metric pro-
vides an assessment of average precision, stipulating
that predictions are deemed accurate when their In-
tersection over Union (IoU) with the corresponding
ground truth bounding boxes is 0.5 or above. Es-
sentially, it gauges the model’s proficiency in object
detection where there is a moderate overlap with the
ground truth annotations.
Mean Average Precision at Intersection over
Union 0.5:0.95 (mAP 0.5:0.95) (Figure 6): This eval-
uative metric expands the assessment to encompass an
array of IoU thresholds, specifically from 0.5 to 0.95,
including intermediate values. It independently deter-
mines the average precision for each threshold, sub-
sequently computing the mean of these values. The
mAP 0.5:0.95 thoroughly appraises the model’s ca-
pabilities, considering its performance across an ex-
tensive range of overlap scenarios. This metric is
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
728
often viewed as a more rigorous evaluative gauge,
which mandates elevated precision across assorted
IoU levels. Both mAP 0.5 and mAP 0.5:0.95 serve
as instrumental metrics in applied settings. The mAP
0.5, affords insights into the model’s performance un-
der relatively forgiving conditions. In contrast, mAP
0.5:0.95 provides a more rigorous assessment, en-
suring the model sustains high precision, even when
object boundaries are meticulously aligned with the
ground truth annotations.
Figure 5: Mean Average Precision Curve over an IoU
threshold of 0.5.
Figure 6: Mean Average Precision Curve over an IoU
threshold range of 0.5 to 0.95.
3.4 F1 Scores
The F1 score, depicted in Equation 4, offers a com-
bined evaluation of a model’s precision and recall.
This metric becomes particularly insightful when
classes are distributed unevenly or when the impli-
cations of false positives differ markedly from false
negatives. Conceptually, the F1 score encapsulates
the overlap between a model’s predictions and the
ground truth. As visualized in Figure 7, we trace the
trajectory of the model’s F1 score across 55 epochs.
By calculating it as the harmonic mean between pre-
cision and recall, the F1 score is a comprehensive
metric, effectively harmonizing the balance between
these pivotal performance indicators. As the F1 score
converges to one, the model’s predictions increas-
ingly align with the actual data, showcasing optimal
precision and recall. This convergence to one indi-
cates near-perfect harmony between detected and ac-
tual document objects, reflecting the model’s exem-
plary performance.
F1 Score =
2
(
1
Precision
+
1
Recall
)
(4)
Figure 7: F1score vs Epochs Curve.
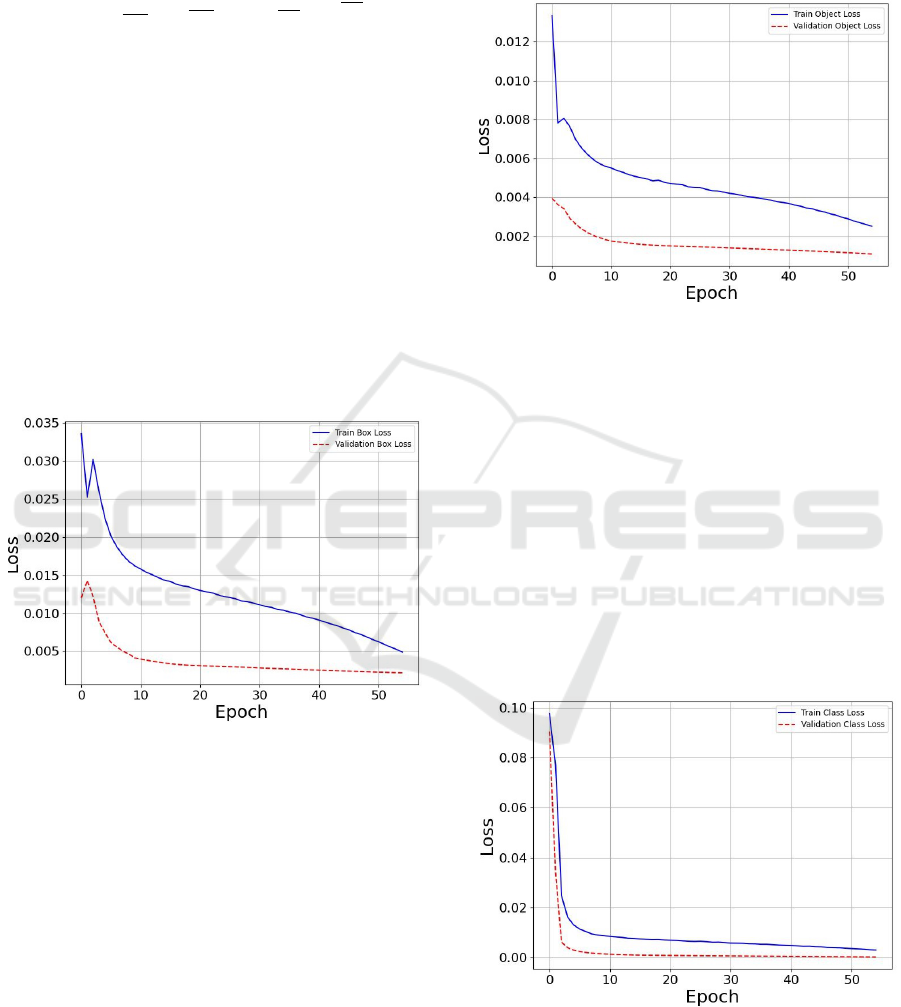
3.5 Loss Functions
Loss functions are used to quantify the difference be-
tween predicted values (output of a model) and ac-
tual target values (ground truth) during training. The
three primary loss components are box loss (minimiz-
ing discrepancies in predicted bounding box coordi-
nates), object loss (ensuring accurate object presence
prediction), and classification loss (optimizing object
categorization accuracy). These loss functions work
together to guide the training process of our object de-
tection model, striving for improved accuracy in ob-
ject localization, object classification, and the distinc-
tion between objects and background regions.
3.5.1 Box Loss
The box loss, as defined in Equation 5 is the differ-
ence between the predicted bounding box parameters
(like center coordinates, width, and height) and the
actual ground truth parameters of the boxes. The ob-
jective of minimizing box loss is to improve the pre-
cision of the model in localizing objects within an im-
age.
Military Badge Detection and Classification Algorithm for Automatic Processing of Documents
729
Box Loss =
S
2
∑
i=0
B
∑
j=0
obj
(k)
i j
·
[(x
i j
− ˆx
i j
)
2
+ (y
i j
− ˆy
i j
)
2
+
(
√
w
i j
−
p
ˆw
i j
)
2
+ (
p
h
i j
−
q
ˆ
h
i j
)
2
] (5)
Here, (x
i j
, y
i j
) and (ˆx
i j
, ˆy
i j
) are the predicted
and true bounding box center coordinates, while
w
i j
, h
i j
) and ( ˆw
i j
,
ˆ
h
i j
are the predicted and true
bounding box width and height respectively. S
2
represents the number of grid cells, in S ×S grid and
B is the number of bounding boxes predicted per grid
cell, ob j
(k)
i j
is the boolean indicator of whether object
k exists in grid cell (i, j).
Depicted by the blue curve in Figure 8, the train-
ing box loss offers insights into the box loss trajec-
tory during the model’s learning phase. An evident
reduction in both training box loss and validation box
loss as epochs progress denotes the model’s sharpen-
ing ability in bounding box predictions throughout its
training epoch cycles.
Figure 8: Box Loss Curves.
3.5.2 Object Loss
Object Loss as shown in Equation 6 is computed us-
ing the mean squared error (MSE) between the pre-
dicted confidence scores and the ground truth confi-
dence scores where the confidence scores confidence
score indicates whether an object is present in a given
grid cell and how accurate the bounding box is.
Obj Loss =
S
2
∑
i=0
B
∑
j=0
ob j
(k)
i j
·(Con f
i j
−
ˆ
Con f
i j
)
2
(6)
Here, Con f
i j
is the predicted confidence score, and
ˆ
Conf
i j
is the true confidence score.
Figure 9 illustrates a concurrent decline in both
training and validation object loss as training pro-
gresses, indicating an enhancement in the model’s de-
tection capabilities. The absence of a significant devi-
ation between these two metrics throughout the train-
ing epochs reassuringly suggests that the model is not
afflicted by issues such as over-fitting.
Figure 9: Object Loss Curves.
3.5.3 Classification Loss
The classification loss is defined as the misalignment
between the predicted class probabilities and the ac-
tual binary class labels within the training dataset,
measuring the model’s reliability in associating ob-
jects with their true categories. As visualized in Fig-
ure 10, an analogous declining trend observed in both
training and validation classification loss across the
training epochs not only corroborates the model’s im-
proving proficiency in object classification but also
mirrors the previously discussed trends in box and ob-
ject loss, solidifying the consistency in the model’s
learning and adaptation throughout the training pro-
cess.
Figure 10: Classification Loss Curves.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
730

4 CONCLUSION
In conclusion, this paper introduced a well-rounded
approach toward automated military badge detection
on government documents by utilizing the YOLOv5
model. By innovatively automating the training data
labelling process and generating a simulated dataset
of military and official documents, circumventing the
issue of public unavailability, a scalable and precise
badge detection system was established. Through
strategic training and hyper-parameter tuning, the
YOLOv5 model showcased substantial proficiency in
detecting various badge types within the documents,
illustrating a promising stride in document-based ob-
ject detection.
REFERENCES
Arvind, N. (2023). A semi-automatic method for document
classification in the shipping industry. In Proceedings
of Neptune’s conference, Samudramanthan 2023 IIT
Kharagpur.
Bailey, E. S., Bonnici, A., and Cristina, S. (2022). A cas-
caded approach for page-object detection in scientific
papers. In Proceedings of the 22nd ACM Symposium
on Document Engineering, DocEng ’22, New York,
NY, USA. Association for Computing Machinery.
Brown, J. D. (2010). Developing an automatic document
classification system: A review of current literature
and future directions. Technical Memorandum DRDC
Ottawa TM 2009-269, Defence Research and Devel-
opment Canada.
Chiu, P., Chen, F., and Denoue, L. (2010). Picture detection
in document page images.
Ciecierski, K. and Kamola, M. (2020). Comparison of Text
Classification Methods for Government Documents,
pages 39–49.
Deng, Q., Ibrayim, M., Hamdulla, A., and Zhang, C.
(2023). The yolo model that still excels in document
layout analysis. Preprint under review at Signal, Im-
age and Video Processing as of August 2023.
Forczma
´
nski, P., Smolinski, A., Nowosielski, A., and
Małecki, K. (2020). Segmentation of Scanned Doc-
uments Using Deep-Learning Approach, pages 141–
152.
Henderson, P. and Ferrari, V. (2017). End-to-end training
of object class detectors for mean average precision.
In Lai, S.-H., Lepetit, V., Nishino, K., and Sato, Y.,
editors, Computer Vision – ACCV 2016, pages 198–
213, Cham. Springer International Publishing.
Huber-fliflet, N., Wei, F., Zhao, H., Qin, H., Ye, S., and
Tsang, A. (2019). Image analytics for legal document
review : A transfer learning approach. In 2019 IEEE
International Conference on Big Data (Big Data),
pages 4325–4328.
Kallempudi, G., Hashmi, K. A., Pagani, A., Liwicki, M.,
Stricker, D., and Afzal, M. Z. (2022). Toward semi-
supervised graphical object detection in document im-
ages. Future Internet, 14(6).
Li, M. and Ghosal, S. (2014). Bayesian Multiscale Smooth-
ing of Gaussian Noised Images. Bayesian Analysis,
9(3):733 – 758.
Liu, C., Tao, Y., Liang, J., Li, K., and Chen, Y. (2018). Ob-
ject detection based on yolo network. In 2018 IEEE
4th Information Technology and Mechatronics Engi-
neering Conference (ITOEC), pages 799–803.
Orosz, T., V
´
agi, R., Cs
´
anyi, G. M., Nagy, D.,
¨
Uveges, I.,
Vad
´
asz, J. P., and Megyeri, A. (2022). Evaluating hu-
man versus machine learning performance in a legal-
tech problem. Applied Sciences, 12(1).
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 779–
788.
Rezkiani, K., Nurtanio, I., and Syafaruddin (2022). Logo
detection using you only look once (yolo) method.
In 2022 2nd International Conference on Electronic
and Electrical Engineering and Intelligent System
(ICE3IS), pages 29–33.
Sarwo, Heryadi, Y., Abdulrachman, E., and Budiharto, W.
(2019). Logo detection and brand recognition with
one-stage logo detection framework and simplified
resnet50 backbone. In 2019 International Congress
on Applied Information Technology (AIT), pages 1–6.
Song, Y., Li, Z., He, J., Li, Z., Fang, X., and Chen,
D. (2019). Employing auto-annotated data for gov-
ernment document classification. In Proceedings of
the 2019 3rd International Conference on Innovation
in Artificial Intelligence, ICIAI ’19, pages 121–125,
New York, NY, USA. Association for Computing Ma-
chinery.
Suto, J. (2023). Improving the generalization capability of
yolov5 on remote sensed insect trap images with data
augmentation. Multimedia Tools and Applications.
Zou, Z., Chen, K., Shi, Z., Guo, Y., and Ye, J. (2023). Ob-
ject detection in 20 years: A survey. Proceedings of
the IEEE, 111(3):257–276.
Military Badge Detection and Classification Algorithm for Automatic Processing of Documents
731
