
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV
Systems in Multi-Purpose Scenarios
Damiano Brunori
a
and Luca Iocchi
b
Department of Computer, Control and Management Engineering (DIAG), Sapienza University of Rome, Rome, 00185, Italy
Keywords:
Deep Reinforcement Learning (DRL), Delay-Aware Environment, Multi-UAV Cooperation.
Abstract:
We provide a customizable environment based on Deep Reinforcement Learning (DRL) strategies for han-
dling cooperative multi-UAV (Unmanned Aerial Vehicles) scenarios when delays are involved in the decision-
making process for tasks such as spotting, tracking, coverage and many others. Users can choose among
various combinations of tasks and parameters and customize the scenarios by implementing new desired func-
tionalities. This environment provides the opportunity to compare different approaches, taking into account
either implicitly or explicitly the delays applied to actions and observations. The awareness of the delay, along
with the possible usage of real-world-based external files, increases the reality level of the environment by
possibly easing the knowledge transferability process of the learned policy from the simulated environment to
the real one. Finally, we show that use cases could generate new benchmarking tools for collaborative multi-
UAV scenarios where DRL solutions must consider delays.
1 INTRODUCTION
Many of the most recent studies involving emergent
scenarios are progressively investigating the usage of
Unmanned Aerial Vehicles (UAVs) to achieve differ-
ent and relevant aims in different application fields.
Indeed, UAVs are recently designed for supporting
Internet of Thing (IoT) applications (Cheng et al.,
2023), firefighting tasks (Pe
˜
na et al., 2022), health-
care items delivery (Scott and Scott, 2017), and many
others. In order to complete the desired task with
the most efficient strategy, cooperation among UAVs
is undoubtedly crucial, especially for persistent and
multi-target missions. Meanwhile, Deep Reinforce-
ment Learning (DRL) techniques showed great re-
sults in handling different tasks by successfully play-
ing ATARI games and solving the Rubik’s cube, and
hence, they are now being investigated to be applied
to more and more dynamic and complex tasks such
as those involving multi-UAV scenarios (Moon et al.,
2021; Wang et al., 2019). Nevertheless, most of the
works associated with DRL techniques are still based
on a strong assumption which could affect real-world
application deployment when complex tasks must be
accomplished. Indeed, delays occurring when receiv-
a
https://orcid.org/0000-0002-0384-3498
b
https://orcid.org/0000-0001-9057-8946
ing observations or executing actions are seldomly
taken into account during the learning process. In
particular, to the best of our knowledge, obtained dur-
ing the preparation of a survey on DRL techniques
for multi-UAV applications (Frattolillo et al., 2023),
delays are never taken into account when consider-
ing multi-agent DRL-based systems with agents rep-
resented by UAVs; hence the importance to consider
the delay in this application field. Multi-UAV sys-
tems thought to be deployed in real-world scenar-
ios are characterized by many hardware constraints
mainly due to their design, which often reflects the
nature of their application. In most cases, some real
constraints are not taken into account in the consid-
ered virtual framework, neither in the scenario set-
tings nor in the learning process. This approach can
be successful in some cases but not in others. In
a real-world scenario, not considering the delay can
still be a valid assumption whenever the agents’ ac-
tions duration perfectly fits each agent’s environment
sensing frequency (sampling capacity). Nonetheless,
the latter condition is very unlikely to occur, both
when dealing with single-agent systems where low-
level control latency is crucial (Chen et al., 2021) and
when multiple agents are involved in the learning pro-
cess, resulting in a massive propagation of the actions
execution time and hence of the observations. In or-
der to properly consider the impact of delays in multi-
334
Brunori, D. and Iocchi, L.
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV Systems in Multi-Purpose Scenarios.
DOI: 10.5220/0012347900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 334-343
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

UAV applications and to assess the performance of
solutions dealing with this problem, a framework to
develop experiments and to compare the results of
different approaches is needed to make efforts in the
field more effective. To this end, the main contribu-
tions of this paper are given by the definition and im-
plementation of a 3D customizable and user-friendly
environment aimed at increasing the reality level of
multi-UAV scenarios for coverage, spotting and track-
ing tasks by considering the delay on both the actions
and the observations when DRL approaches are used
as solution techniques. The environment is called
Delay-Aware MultI-Aerial Navigation (DAMIAN)
1
,
and it is inspired and extends our previous work in
multi-UAV reinforcement learning and path planning
(Brunori et al., 2021b; Brunori et al., 2021a) and the
one for air traffic control (Dalmau and Allard, 2020).
DAMIAN is provided with two well-known DRL al-
gorithms, i.e., Proximal Optimization Policy (PPO)
(Schulman et al., 2017) and Soft-Actor Critic (SAC)
(Haarnoja et al., 2018), and their delay-aware vari-
ations. Some use cases are provided and could be
used as a benchmarking tool for specific application
scenarios. Through external files following the Euro-
control official format, we can reproduce real opera-
tive areas involving multi-UAV systems, hence help-
ing the benchmark analysis for different DRL algo-
rithms applied to a desired scenario. Finally, since the
environment is designed to be easily extended and ed-
itable, it can also be used to reproduce other different
multi-UAV applications.
2 RELATED WORKS
UAV applications using DRL techniques have been
increasing in the last few years. Area coverage tasks
are the most common, where UAVs can be used for
different aims such as Mobile Crowd Sensing (MCS)
operations (Liu et al., 2019) or in leader-follower
situations (Mou et al., 2021): they mostly apply a
learning paradigm based on Centralized Training and
Decentralized Execution (CTDE), but using different
DRL algorithms. Many other applications studying
the combined usage of multi-UAV systems with DRL
techniques are mainly represented by communication
and computation offloading tasks, where communica-
tion support (Zhu et al., 2021) and allocation strate-
gies for the available resources (Sacco et al., 2021)
are investigated, respectively. The former uses a mod-
ified version of the Multi-Agent Deep Deterministic
1
https://github.com/DamianoBrunori/DAMIAN-
Delay-Aware-MultI-Aerial-Navigation-DRL-based-
environment-
Gradient (MADDPG) algorithm in a 3D environment
by using a CTDE learning paradigm, whilst the lat-
ter applies a decentralized paradigm involving a large
number of agents (up to 200). Nevertheless, some
strong assumptions are still made for multi-UAV sys-
tems relying on a DRL algorithm. Hence, we al-
low you to remove one of those main assumptions,
namely that there are no delays in receiving observa-
tions (or rewards) or executing actions. More in de-
tail, the implemented environment allows the applica-
tion of a delay on both the actions and the observa-
tions, contrary to that described by Chen al. (Chen
et al., 2021), which only applies the action delay. The
multi-agent case with delays is also handled (Chen
et al., 2020), but the use cases considered are already
set and it could be difficult to customize them by di-
rectly modifying the source code. Also, another work
(Yuan et al., 2023) considers use cases obtained by
code modification of existing environments.
Instead, the environment proposed in this paper al-
lows us to configure new scenarios and learning fea-
tures easily through user-friendly configuration files.
Differently from other works dealing with delays
(Agarwal and Aggarwal, 2021; Arjona-Medina et al.,
2019), 3D environments can be tested as we are deal-
ing with UAVs, and hence, the takeoff, flight and
landing phases need to be taken into account when
the action execution delay is applied to the consid-
ered scenario. The user can also set different clocks
for the agents (which are supposed to be homoge-
neous), for the central node system communicating
with them, and for the simulation step. Furthermore,
none of the available delay-aware MDP frameworks
handles external files containing information from a
real scenario: DAMIAN also provides this new fea-
ture that allows learning a policy performing the sim-
ulated training phase directly on a real-world oper-
ative polygon based on latitude and longitude coor-
dinates. Finally, hyperparameters tuning is also pro-
vided.
3 DELAY-AWARE MULTI-UAV
ENVIRONMENT
In this section, after defining some necessary notions
related to a delay-aware MDP, we describe the main
structure of the proposed Environment.
3.1 Background Notions
Based on the single-agent MDP definition (Puter-
man, 1990), we can define a single-agent Delay-
Aware MDP (DA-MDP) (Chen et al., 2021) as a tu-
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV Systems in Multi-Purpose Scenarios
335

ple ⟨X,A,T,R⟩ augmenting the single-agent MDP
⟨S,A,T , R ⟩ such that:
• X = S × A
d
is a set of states x
i
∈ X, where d in-
dicates the maximum delay step that an agent can
store;
• A = A is the action space;
• T(x
t+1
|x
t
,a
t+d
) = T(s
t+1
,a
t+1
t+1
,...,a
t+1
t+d
|s
t
,a
t
t
,
...,a
t
t+d−1
,a
t+d
) is the probability transition
function. The action’s subscript shows the ac-
tion’s completion time, whilst the action’s super-
script indicates when the action started (when the
superscript is not specified, then it means that the
corresponding action has been chosen at time t);
• R(x
t
,a
t+d
) = R(s
t
,a
t
,...,a
t+d−1
,a
t+d
) is the re-
ward function.
Note that for any possible delay D, if D > d, then
some information is lost. S and A are the set of
states (with s
i
∈ S) and actions (with a
i
∈ A), respec-
tively, of the classical MDP; the mapping function as-
sociated with its transition function is expressed as
T : S × A × S → R , whilst the function related to
its reward is defined by S × A → R . Thus, the state
space of a DA-MDP is augmented by an actions’ se-
quence that is executed in the next d ∈ N steps, repre-
senting the action delay: the action a
t+d
starts at time
t, but its execution ends at time t + d. The augmented
MDP (Katsikopoulos and Engelbrecht, 2003) helps us
to avoid getting arbitrary sub-optimal policies due to
some hidden states (Singh et al., 1994). The concept
of delay-aware MDP can be applied to the multi-agent
case, i.e., to a Markov game (Littman, 1994), obtain-
ing a Delay-aware Markov Game (DA-MG) (Chen
et al., 2020) with a larger decrease in the system
performance depending on the number of the agents
N. The Delay-aware Markov Game is defined as a
tuple ⟨P,X, A, T, R⟩ augmenting the Markov Game
⟨P,X,A,T , R ⟩ such that:
• P has the same meaning as P in the classic Markov
Game, i.e., the number of p ∈ N agents;
• X = S ×A
d
1
1
···×A
d
N
N
where d
i
indicates the max-
imum delay step that can be stored by the agent
i, while A
i
is the action space of the agent i de-
scribed as in the DA-MDP;
• A = A is the action space, where A =
{A
1
,...,A
N
};
• T(x
t+1
|x
t
,a
t+d
) = T(s
t+1
,a
1,t+1
t+1
,...,a
1,t+1
t+d
1
,...,
a
N,t+1
t1+1
,...,a
N,t+1
t+d
N
|s
t
,a
1,t
t
,...,a
1,t
t+d
1
−1
,...,a
N,t
t+d
N
−1
,
a
t+d
) is the probability transition function, where
the superscripts i = 1,...,N indicate the agent i,
and the rest of the notation is the same as in the
DA-MDP case;
• R
i
(x
t
,a
i
t+d
) = R
i
(s
t
,a
i
t
,...,a
i
t+d−1
,a
i
t+d
) for the
agent i; similarly to the single-agent case, a
i
t+d
means that the action of the agent i starts at t and
its execution ends at t + d.
Now, we will see different types of delays with
their consequences and how they could be handled.
We start with a direct action delay, i.e., when the
chosen action needs some time to be executed. It
leads to: i) indirect observation delay as new obser-
vation will be generated only after executing a time-
delayed action; indirect reward delay, indeed the re-
ception of the reward is delayed as we cannot assign
a reward until the effect of the action execution is not
observable. The second possible delay is the direct
observation delay, bringing with it: i) incomplete
observation due to the agents that cannot access all
the information at the current instant as some may not
be available yet; ii) obsolete information availability
as some of the available observations may not be up-
dated yet, and hence, they refer to an old state; iii) in-
direct reward delay because of the inability to assign
a reward until the observation is available; iv) direct
affection on action selection, indeed actions are cho-
sen based on what the agent can observe, and if the
agent can only look at old observations at the current
instant, then the action selection will be based on out-
dated information. Finally, there is a direct reward
delay. Some additional rewards, either positive or
negative, can occur according to some circumstances
which do not strictly depend on the delays associ-
ated with actions or observations (e.g., progressive
malfunction of onboard mechanical components). A
time-delayed reward is characterized by a direct af-
fection on action selection.
3.2 Environment Overview
In the proposed Delay-Aware multi-UAV environ-
ment, the agents, i.e., the UAVs, can complete dif-
ferent cooperative tasks for complexity and hetero-
geneity. The environment is compatible with the Ope-
naAI Gym interface
2
for easy scalability, deploya-
bility, flexibility and extendability. The overall goal
of the agents can be selected at wish by choosing
one, some or all of the desired tasks to be completed,
and hence modifying the scenario complexity accord-
ingly. For instance, a quite complex scenario can in-
volve a dynamic and discontinuous signal source that
needs to be spotted and tracked by maximizing the
area coverage while minimizing the battery consump-
tion. It is known that an action delay leads to an obser-
vation delay, and hence, these two delays are mathe-
2
https://www.gymlibrary.dev/index.html#
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
336
matically equivalent (Katsikopoulos and Engelbrecht,
2003). Nevertheless, a crucial difference arises when
the learning process takes place. Indeed, when an ac-
tion delay occurs, the effect of the delayed action that
has been executed could be observed only in the fu-
ture. However, once the agents receive that observa-
tion, they will be able to access the present state of
the environment at that future time. Conversely, when
an observation delay occurs, the agents will be able
to observe the past environment state and not how it
looks when the agents are processing the observation.
Thus, an action delay provides an (implicit and de-
layed) observation updated to the present time, whilst
an observation delay provides information only about
the past and not the present time. This relevant dif-
ference between these two delays can be crucial if not
explicitly considered by a delay-aware (D)RL algo-
rithm.
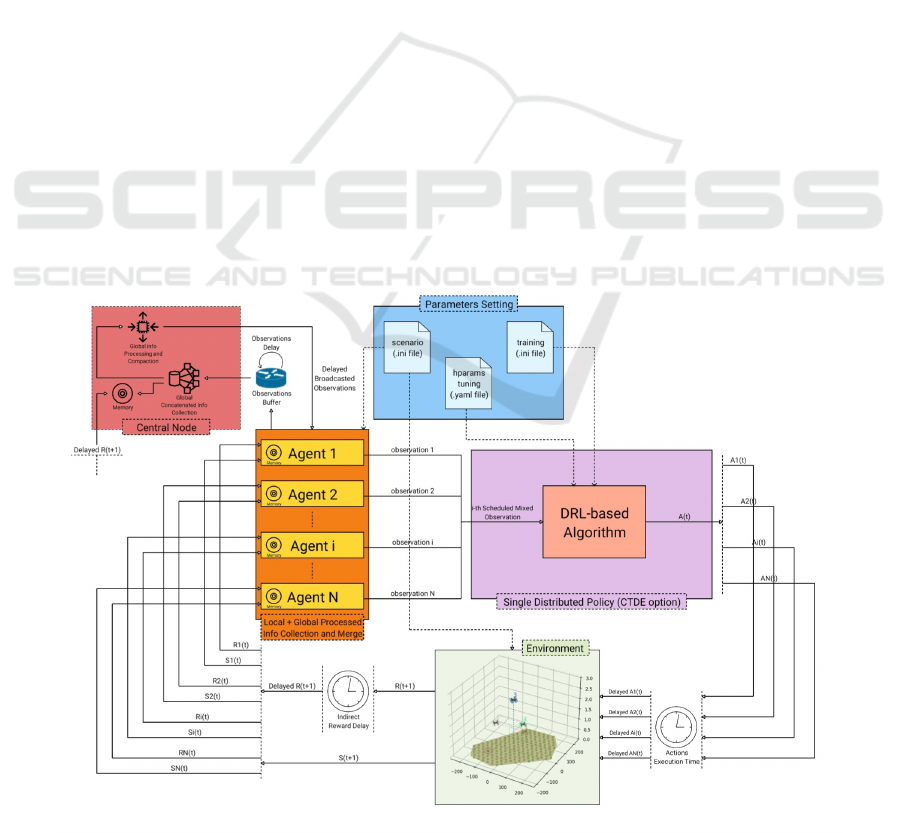
A straightforward overview of the workflow of the
DAMIAN environment is shown in Figure 1, better
explained in the rest of this section. From the en-
vironment structure, it is possible to notice that we
chose to distribute a single policy with a CTDE learn-
ing paradigm in order to allow the system to be scal-
able to real-world applications, where the number of
agents could differ from that used during the train-
ing phase. With the same aim, a server node is sup-
posed to be used to receive information from all the
agents, to process the information by making them in-
dependent from the number of the agents, and to share
the newly processed information with all the agents.
The agents can exchange information bidirectionally
with the server node by selecting an action only when
landed: when considered, the agents’ battery can be
charged whenever they land as they are supposed
to be provided with solar panels. In any case, this
setting can be easily changed or re-implemented by
limiting the possibility to charge only to specific ar-
eas where charging stations can be placed. In or-
der to increase the motion reality level, the motion
of the UAVs is modelled through polynomial trajec-
tories (3rd, 5th, 7th degree) that can be chosen based
on the constraints to be applied to the agents (e.g.,
maximum allowed velocity). The agents are supposed
to travel a rest-to-rest trajectory between the takeoff
and the landing point, stopping at their assigned flight
level after the takeoff phase and immediately before
starting the landing phase (which is typical for quad-
copters’ systems). A controller is assumed to be able
to always interpolate all the points of a selected tra-
jectory, which is defined as:
Tra j
i
=
P
1
(x
t
,y
t
,0),P
2
(x
t
,y
t
,FL
i
),
P
3
(x
l
,y
l
,FL
i
),P
4
(x
l
,y
l
,0)
(1)
where i = 1, . . . , N, with N indicating the number of
agents, FL
i
representing the flight level associated
with the agent i, and (x
t
,y
t
) and (x
l
,y
l
) denoting the
2D coordinates related to the takeoff and landing, re-
spectively. The signal source, which can possibly be
set in spotting and tracking tasks and which moves
Figure 1: Structure overview of DAMIAN environment.
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV Systems in Multi-Purpose Scenarios
337
according to a trapezoidal speed profile, is modelled
through the general inverse-square law. In particular,
in the DAMIAN environment, we assume a spherical
signal source at a specific distance r with the follow-
ing intensity:
I = P/(4πr
2
) (2)
where P is the power of a source point. Now, based
on the minimum intensity level I
mic
that a UAV’s mi-
crophone can detect, we can compute the radius R
f
of
the agents’ sensing range (footprint) as follows:
R
f
=
p
P
mic
/(4πI
mic
) (3)
where P
mic
represents the power of the sound source
detectable by the microphone that has been used. Fi-
nally, the area and the shape of the desired operative
polygon can be either randomly generated or manu-
ally provided using an external file based on i) the
official Eurocontrol format for the Flight Informa-
tion Region (FIR)
3
or on ii) a specific area of interest
drawn from the map of a real-world zone through the
GeoJSON online editor
4
. The Haversine equations al-
low us to produce a realistic response suitable for the
latter cases based on real-world operative polygons.
3.3 Delayed Actions Handling
We assume that every perturbation which could af-
fect the interpolation of the waypoints chosen by the
UAV’s policy is negligible. We do not need an action
buffer (Chen et al., 2021) to execute the actions ”in-
stantaneously” after the delay associated with them
is passed, as the agents’ motion is already modelled
in DAMIAN: we can keep track of the environment
changes even during the execution of every UAVs’ ac-
tion. The single-agent solution proposed by Chen et
al. (Chen et al., 2021) does not suit our multi-UAV
system, which could suffer from scalability issues:
they store in the state vector both the current obser-
vation and some of the last n actions executed by the
agents, and hence, the more the number of the agents
the larger would be the state space. However, we can
adapt this solution in such a way as to avoid this issue
by using a CTDE learning paradigm, where the past n
actions are stored inside the actor network. Thus, the
old actions stored in the observation space are con-
sidered only locally to avoid any dependence on the
number of agents and the global system information.
Including the last N actions in the state vector, we
respect the memoryless Markov property associated
with the MDP model of the environment: the features
3
https://www.eurocontrol.int/publication/rnd-data-
archive-structure-and-sample
4
https://geojson.io/#map=2/0/20
of random variables associated with the future depend
on observations about the current time and not related
to the past. If the last N actions were not part of the
state, then the reward would depend on changing and
hidden variables from the agent.
3.4 Delayed Observations Handling
As already seen in Section 3.1, the observations’ de-
lays lead to a state space which could be either partial
or obsolete. To mitigate this issue, we can introduce
two memory buffers at global (server node memory)
and local (UAV memory) levels, storing the observa-
tions and rewards history. This structure allows us to
update (back in time) some possible delayed observa-
tions by assigning them to the proper time instant ac-
cording to their Age of Information (AoI); afterwards,
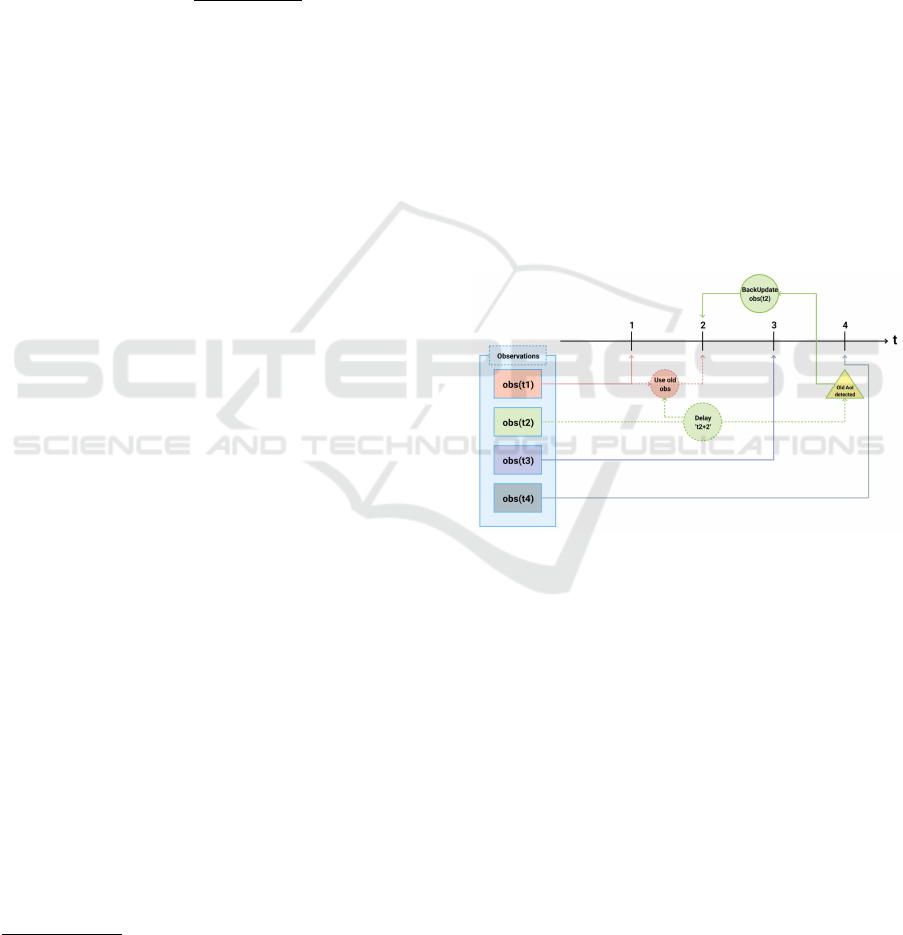
we can recompute the past rewards accordingly. The
learning step is performed only after N steps in such
a way as to let the backupdating process (Figure 2) be
performed on the stored observations and rewards be-
fore they are fed as input into the learning procedure.
Figure 2: Observations’ backupdating process.
This approach can be considered a reward redis-
tribution technique, which is different from the re-
ward shaping as the latter adds a new reward to an
existing one, while the former completely replaces the
old reward with a new one. In particular, in our case,
we totally recompute the global observation (and re-
ward accordingly) based on the proper Age of Infor-
mation assigned to the delayed observation currently
received (see Figure 2). The RUDDER algorithm
(Arjona-Medina et al., 2019) instead does not backup-
date the state space and the reward based on the AoI
of the current observations. However, it applies super-
vised learning through past experience to estimate the
future average cost by including it in the reward to
achieve a zero value for the future expected reward.
The reward used in DAMIAN can be considered as
non-Markovian, i.e., similar to a situation represent-
ing a case in which the agent can receive the reward
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
338
only after having completed a series of previous tasks
(Rens. et al., 2021). In our case, we do not have dif-
ferent tasks, but we have an implicit delayed reward
due to either actions and/or observations delays; for
both cases, the agents will obviously experience a de-
lay in receiving the reward. The non-Markovian prop-
erty deriving from the delayed reward is overcome by
considering the past actions in the state vector and by
the observation backupdating when the agents expe-
rience an action and an explicit observation delay, re-
spectively. In particular, when dealing with an explicit
observation delay, the selection of the learning time
instant is crucial for smoothing the non-Markovian
reward property as the learning step can exploit the
backupdating either at best or partially or not at all.
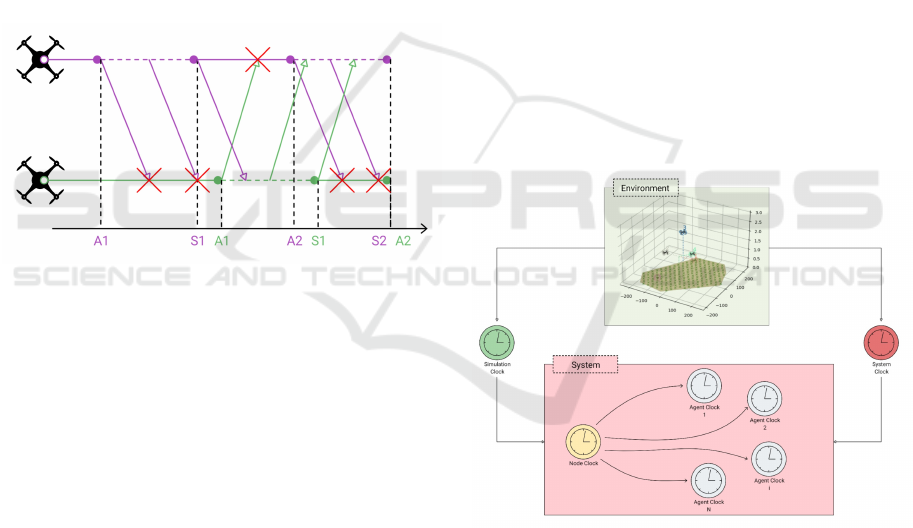
The possible delays that can be applied in our envi-
ronment are shown in Figure 3, where only two agents
are shown for clarity: violet colour refers to the first
agent, whilst green indicates the second agent.
Figure 3: Possible environment delays.
In this Figure, A
i
,S
i
(with i = 1,2 representing the
sequential number of the agents’ actions) are the end-
ing time of movement actions (horizontal solid line)
and sensing actions (horizontal dotted line), respec-
tively. The latter depends on the time the agent is
supposed to perceive the environment and then wait
before taking the next action. Oblique lines indicate
agents’ exchanging process that can only occur when
agents land and sense the environment.
3.5 Delayed Rewards Handling
We know that a proper reward can be shaped based
on the reward function r(t) associated with the desired
task to be performed. Now, an over time-deteriorating
reward function R(t) can take into account the reward
delay deriving from the time needed to execute the
actions:
R(t) =
T
∑
t=1
γ
T −t
r(t), with 0 < γ ≤ 1 (4)
where t is the current time instant, T is the max-
imum number of time instants the agent can look
back at, and γ is a discount coefficient composing
the relevance term Γ = γ
T −t
. The more recent the
reward is, the more weight the relevance term will
have on the total reward R(t). Defining the reward
variation between two subsequent time instants ∆
R
=
|R(t − 1) − R(t)|, we can also observe that the closer
the discount factor γ is to 0, the larger ∆
R
will be, and
vice versa. A cumulative reward function, as in (4),
seems to be an efficient way to consider the implicit
delay that can occur at the reward level (Kim, 2022).
3.6 Clocks
DAMIAN environment is provided with a default
sampling step corresponding to the simulation step,
which is, in turn, the same as those associated with
the server node and the agents. The user can arbi-
trarily set the simulation and the server (and agents)
sampling steps; however, they must be multiples of
each other. The system clock can also be set, allow-
ing one to specify when collecting information for the
learning procedure from both the server node and the
agents. Thus, the environment can be sampled at dif-
ferent time-step levels (Figure 4): i) simulation; ii)
system; iii) server node; iv) agents.
Figure 4: Sampling Features DAMIAN environment.
Indeed, four different clocks with different (or
equal) sampling frequencies can be set. To the best
of our knowledge, there is no such multi-UAV MDP
framework allowing for different clock selections:
this can help better exploit the backupdating process
when observation delays are involved. The system
clock frequency allows collecting the observations to
be stored for the learning phase and can be a constant
or variable.
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV Systems in Multi-Purpose Scenarios
339
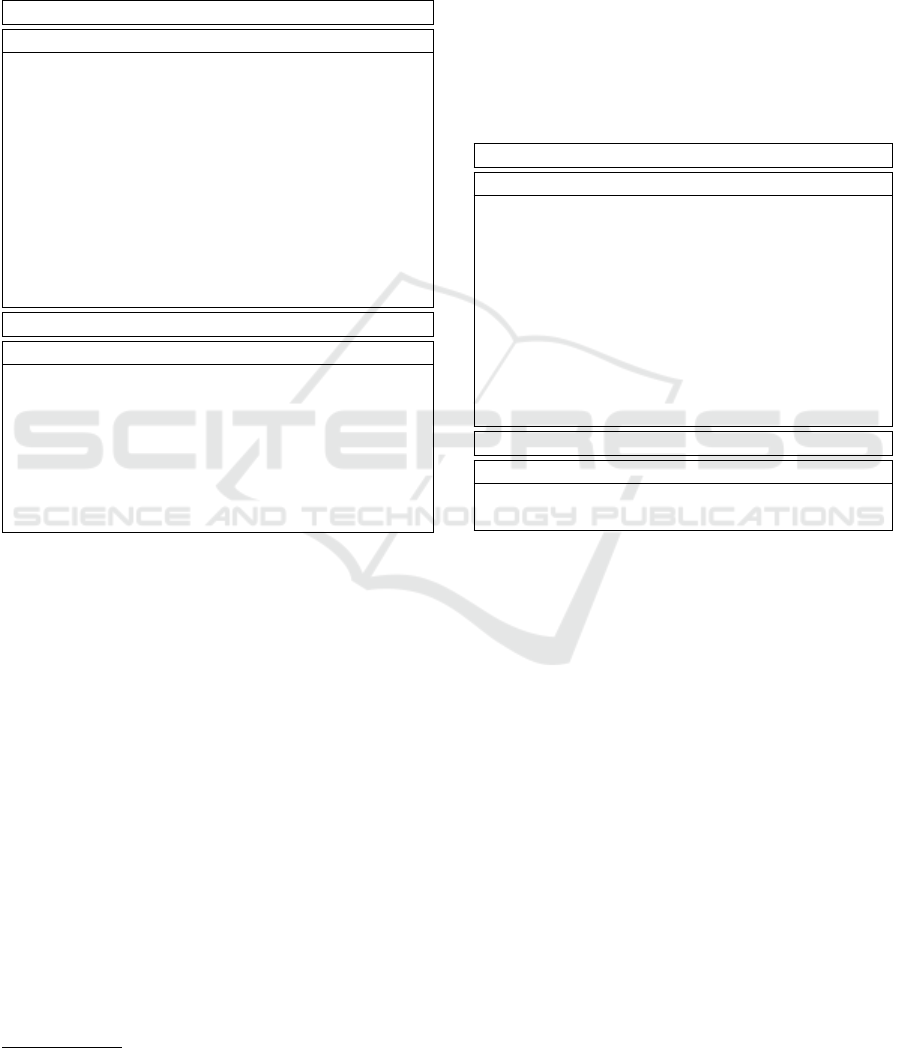
4 CUSTOMIZABLE USE CASES
Three configuration files can be easily used to change
and mix several scenarios and learning options (Ta-
ble 1)): a .yaml file also allows for hyperparameters
tuning through the W &B platform
5
.
Table 1: A non-exhaustive list of possible settings.
Scenario Settings
Parameter definition Unit Measure
Simulation step s ∨ m ∨ h
Min/Max operative area m
Number of agents 1
Min/Max flight level m
Max agents velocity m/s
Max agents acceleration m/s
2
Power battery capacity KW h
Battery charging power KW
Min microphone threshold dB
Max source velocity m/s
Max source acceleration m/s
2
Training Settings
Parameter definition Domain
Action space
{
2
S
i=1
a
i
: a
i
∈ N,R}
Observation space
{
12
S
i=1
o
i
: o
i
∈ R,N,B}
Learning rate R ∈ [0,1]
Discount factor R ∈ [0,1]
Number of epochs N
4.1 Scenario and Learning Settings
The complexity level of the operative scenario can
be modified by simply adding, removing or changing
some parameters in the corresponding configuration
file. Other flag values (in addition to those shown in
Table 1) can be set at wish to select: i) a static or
dynamic motion of the source; ii) a constant or dy-
namic signal emission from the source; iii) a delay
either during the action execution and/or in receiv-
ing the observations; iv) an explicit clock system or
not. The learning phase is also customizable. Consid-
ering specific observations leads to achieving differ-
ent goals according to different pre-built reward func-
tions. Furthermore, other flag values can be used by
enabling/disabling: i) the delay either during the ac-
tion execution and/or in receiving the observations; ii)
specific terminal conditions for ending the episodes
(e.g., time failure, battery failure); iii) a CTDE learn-
ing paradigm; iv) an option to use or not a cumulative
reward defined as in (4).
5
https://wandb.ai/site
4.2 MDP Main Features
The main features of the MDP used in the DAMIAN
environment are dealt with in more detail by describ-
ing the actions, observations and rewards available for
the agents (Table 2 shows the notation used to define
the rewards).
Table 2: List of the available observations for the system
(global) and the UAVs (local): they can be modified, com-
bined, reduced or increased at wish. Min. stands for Mini-
mum, dist. is the distance, CA indicates the Closest Agent,
det. is detection, and avg stands for average. Finally, SS
agents are the Source-Spotting agents, whilst the NS agents
are the source Not-Spotting agents.
Global Observations
Name Notation UM
Min. agent-source dist. d
s
m
CA-source bearing b
s
deg
CA-source drift θ
s
deg
Time since source det. t
s
s ∨ m ∨ h
Agents distances d
a
m
Agents coverage area c
a
m
2
Avg dist. of all agents d m
Avg dist. of NS agents d
nss
m
Avg dist. of SS agents d
ss
m
N. of SS agents N
ss
1
Local Observations
Name Notation Domain
Battery b N
Spotting the signal source k B
The actions can be either discrete or continuous,
picking a landing point for the agents through a two-
choice selection associated with the distance to travel
and the orientation angle of the agents. Both observa-
tions and actions are normalized in the interval [0, 1].
For what concerns the reward design, the whole sys-
tem reward R
s
, i.e., computed based on information
coming from all the agents, is defined as follows:
R
s
=
N
∑
i=1
R
s
i
(5)
where R
s
i
is the system reward i. Indicating with w
x
the weight of the reward x, we define the reward for
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
340

the whole system as follows:
R
s
i
=
(
w
d
s
(1 − d
s
) l = 0
w
d
s
(1 − d
s
)l
−1
l ̸= 0
i=1
w
t
s
(1 −t
s
) i=2
w
b
s
(1 − b
s
) i=3
(
w
t
s
(2θ
s
) θ
s
∈ [0,0.5]
w
t
s
(1 − θ
s
) θ
s
∈ (0.5,1]
i=4
w
ss
[1 − (M
ss
−
N
ss
N
|)] i=5
w
avg
[1 − (D − d)] i=6
w
nss
[1 − (D
nss
− d
nss
)] i=7
w
ss
[1 − (D
ss
− d
ss
)] i=8
(6)
where D indicates a desired value associated with the
considered reward, and l represents the number of
motions (including holding the position) before spot-
ting the source. The drift angle θ ∈ [−π,π] is com-
puted as the difference between the bearing angle (be-
tween the signal source and the agent) and the agent
orientation. M
ss
is the desired percentage of agents
spotting the signal source, whilst N is the total num-
ber of agents. The rewards R
s
i
, with i = 1, . . . , 3, re-
fer to rewards encouraging to reduce the distance, the
bearing angle and the last detection time, respectively,
w.r.t. the signal source. The reward R
s
4
indicates a re-
ward aiming at reducing the drift angle w.r.t the sig-
nal source, whilst R
s
5
is a reward ensuring a desired
number of agents spotting the signal source at the
same time. The last system rewards available R
s
i
(with
i = 6, . . . , 8) enforce the distance values d,d
nss
,dss to
be consistent with D, D
nss
, D
ss
. The latter values rep-
resent the desired average agents’ distances among all
the agents in general, all non-source-spotting agents,
and all the source-spotting agents, respectively. Con-
cerning the rewards i related to the individual agent a,
they are defined as follows:
R
a
i
=
w
c
a
c
i
a
i=1
(
w
k
k l = 0
w
k
k
l
l ̸= 0
i=2
w
b
b i=3
(7)
The individual rewards R
a
1
, R
a
2
, R
a
3
are related to the
area coverage, signal source detection, and the bat-
tery consumption tasks, respectively; l has the same
meaning as in (6). Each area coverage is computed
by excluding possible overlaps between the current
agent area i and both the operative polygon area and
other agents’ areas j ( j ̸= i); self-overlaps w.r.t. pre-
vious positions are also considered. Finally, based on
(5), (7), the total reward for each agent i is as follows:
R
i
tot
= w
a
3
∑
i=1
R
a
i
+ w
s
R
s
(8)
4.3 Solution Approach
In order to explicitly introduce the delay in the learn-
ing process, we can apply the approaches described in
Sections 3.3, 3.4, 3.5 to the standard DRL-based algo-
rithms versions. An adaptive system clock would be
desirable to make the most of delay-aware algorithms,
mainly when explicit observation delays must be han-
dled. Nevertheless, a manual (constant) or a variable
selection can still allow profit from the already de-
scribed backupdating process. By running different
experiments, it is possible to derive the best clock
system frequency that allows the agents to choose the
actions based on information that is as up-to-date as
possible. When using the deterministic clock selec-
tion, a trigger-based system clock will sample the en-
vironment with a deterministic updating rule that in-
creases or decreases the sampling frequency based on
whether a UAV has spotted the signal source or not,
respectively. System performance variations need to
be experimentally assessed in future work based on
the clock selection.
5 USE-CASE SCENARIOS
The configuration’s files allow us to perform different
analyses comparing the agent(s) performance depend-
ing on the desired task(s). We show here two possible
use cases that can be run using our environment: the
scenario settings and the seed used are the same for all
the tests done in the same use case to be able to repro-
duce the same results. A graphical comparison can be
easily performed using the TensorFlow
6
functionali-
ties provided by our environment. PPO algorithm and
its delay-aware variation associated with the scheme
described in Section 3.4 by keeping fixed the follow-
ing parameters values for all the use cases (no hyper-
parameters tuning): i) learning rate = 0.0003; ii) dis-
count factor = 0.9; iii) Generalized Advantage Esti-
mator = 0.85; iv) Clipping = 0.2; v) Entropy = 0.01.
Both the clock frequency and the number of training
epochs (500) are fixed. All the UAVs have the same
initial location, their microphone threshold is set to
105 dB, and no energy constraint is considered; a
static audio source with constant sound emission at
140 dB is supposed to be spotted by the agents. The
robustness of the results that can be obtained (as in
the following use cases) could be further evaluated by
using different seeds, techniques (among those avail-
able) and parameters.
6
https://www.tensorflow.org/
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV Systems in Multi-Purpose Scenarios
341

5.1 Use Case 1: Single-Agent with Delay
Only one agent is tested, and observation delay is ap-
plied. The goal is to find an audio source with the
smallest number of possible movements. Observation
space is made only by the local info k reported in Ta-
ble 2, and the reward only includes the local agent
credit R
a
2
(w
k
= 1.0) weighted at its maximum value
w
a
= 1.0. In case of a successful episode, i.e., the
audio source has been spotted within 15 iterations,
the agent is rewarded with an additional reward equal
to 0.5. Otherwise the episode is simply stopped, and
no negative reward is provided. Figure 5 shows that
when the delay is applied to the considered scenario,
the reward trend is quite similar for the delay-aware
and the standard version of the PPO algorithm: even
if the delay-aware version converges a bit slower, it
overcomes the reward obtained with the standard al-
gorithm after convergence. The plot for PPO without
delay applied is shown as a reference.
Figure 5: Use case 1 reward (smoothing factor α = 0.991).
A proper evaluation metric (e.g., number of steps
per episode) could be used to check whether the re-
ward’s performance is effectively reflected in the en-
vironment.
5.2 Use Case 2: Multi-Agent with Delay
Three agents are involved in this case, and observa-
tion delay is applied as in the previous case. We want
to spot an audio source with all three agents in 15 it-
erations per episode at most, getting both local and
global information: local ones are as before, whilst
global ones are represented by d
s
(see Table 2). The
reward function here is made up of the local reward
R
a
2
, (w
k
= 0.05), and the global one R
s
1
(w
d
s
= 0.04).
The local and the global rewards are then weighted
both at their maximum values, i.e., w
s
= w
a
= 1.0.
The ending and the success of an episode are defined
as in the first use case, but now we need all three
agents to spot the source at the same time: when suc-
cessful, an extra sharp reward depending on the time
elapsed since the beginning of the episode is provided
to the agents. Thus, the primary task is still associ-
ated with the spotting action. Figure 6 shows that the
delay-aware PPO achieves better performance with
respect to the standard version, and it is close to the
reference reward that can be obtained when delays are
not introduced in the environment.
Figure 6: Use case 2 Total reward (smoothing factor α =
0.991).
In this case, a proper evaluation metric to double-
check the effectiveness of the algorithms could be us-
ing the same metric as in the previous case.
6 CONCLUSIONS
We propose DAMIAN, a 3D DRL-based environment
allowing for testing customizable use cases at differ-
ent complexity levels for cooperative multi-UAV sce-
narios. Our environment is provided with PPO and
SAC algorithms with their delay-aware variations by
allowing the agents’ delay (in executing the actions
and receiving the observations) to be considered. The
user-friendly configuration eases the scalability, mod-
ularity and usability. Different clock selections for
the agents and the whole system are available, and
two use cases are also provided. Since external files
can be used to reproduce a real scenario, our envi-
ronment could be used by Eurocontrol to learn and
test specific and desired agents’ behaviours. Future
work includes assessing the system’s performance de-
terioration based on the considered task as the num-
ber of agents increases. Finally, learning clock agents
should be explored further to develop more effective
delay-aware DRL algorithms.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
342

ACKNOWLEDGEMENTS
This research was partially funded by the ERC Ad-
vanced Grant WhiteMech (No. 834228), the PNRR
MUR project PE0000013-FAIR, and also supported
by the BUBBLES Project (Grant No. 893206).
REFERENCES
Agarwal, M. and Aggarwal, V. (2021). Blind decision mak-
ing: Reinforcement learning with delayed observa-
tions. Proceedings of the International Conference on
Automated Planning and Scheduling, 31(1):2–6.
Arjona-Medina, J. A., Gillhofer, M., Widrich, M., Un-
terthiner, T., Brandstetter, J., and Hochreiter, S.
(2019). Rudder: Return decomposition for delayed
rewards. In Wallach, H., Larochelle, H., Beygelzimer,
A., d'Alch
´
e-Buc, F., Fox, E., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 32. Curran Associates, Inc.
Brunori, D., Colonnese, S., Cuomo, F., Flore, G., and Ioc-
chi, L. (2021a). Delivering resources for augmented
reality by uavs: a reinforcement learning approach.
Frontiers in Communications and Networks, 2.
Brunori, D., Colonnese, S., Cuomo, F., and Iocchi, L.
(2021b). A reinforcement learning environment for
multi-service uav-enabled wireless systems. In 2021
IEEE International Conference on Pervasive Comput-
ing and Communications Workshops and other Affili-
ated Events (PerCom Workshops), pages 251–256.
Chen, B., Xu, M., Li, L., and Zhao, D. (2021). Delay-
aware model-based reinforcement learning for contin-
uous control. Neurocomputing, 450:119–128.
Chen, B., Xu, M., Liu, Z., Li, L., and Zhao, D.
(2020). Delay-aware multi-agent reinforcement learn-
ing. CoRR, abs/2005.05441.
Cheng, N., Wu, S., Wang, X., Yin, Z., Li, C., Chen, W.,
and Chen, F. (2023). Ai for uav-assisted iot appli-
cations: A comprehensive review. IEEE Internet of
Things Journal, 10(16):14438–14461.
Dalmau, R. and Allard, E. (2020). Air Traffic Control Using
Message Passing Neural Networks and Multi-Agent
Reinforcement Learning. In 10th SESAR Innovation
Days (SID), Virtual Event.
Frattolillo, F., Brunori, D., and Iocchi, L. (2023). Scal-
able and cooperative deep reinforcement learning ap-
proaches for multi-uav systems: A systematic review.
Drones, 7(4).
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor. ArXiv,
abs/1801.01290.
Katsikopoulos, K. and Engelbrecht, S. (2003). Markov de-
cision processes with delays and asynchronous cost
collection. IEEE Transactions on Automatic Control,
48(4):568–574.
Kim, K. (2022). Multi-agent deep q network to enhance
the reinforcement learning for delayed reward system.
Applied Sciences, 12(7).
Littman, M. L. (1994). Markov games as a framework for
multi-agent reinforcement learning. In International
Conference on Machine Learning.
Liu, C. H., Chen, Z., and Zhan, Y. (2019). Energy-efficient
distributed mobile crowd sensing: A deep learning ap-
proach. IEEE Journal on Selected Areas in Commu-
nications, 37(6):1262–1276.
Moon, J., Papaioannou, S., Laoudias, C., Kolios, P., and
Kim, S. (2021). Deep reinforcement learning multi-
uav trajectory control for target tracking. IEEE Inter-
net of Things Journal, 8(20):15441–15455.
Mou, Z., Zhang, Y., Gao, F., Wang, H., Zhang, T., and Han,
Z. (2021). Three-dimensional area coverage with uav
swarm based on deep reinforcement learning. In ICC
2021 - IEEE International Conference on Communi-
cations, pages 1–6.
Pe
˜
na, P. F., Ragab, A. R., Luna, M. A., Ale Isaac, M. S.,
and Campoy, P. (2022). Wild hopper: A heavy-duty
uav for day and night firefighting operations. Heliyon,
8(6):e09588.
Puterman, M. L. (1990). Chapter 8 markov decision pro-
cesses. In Stochastic Models, volume 2 of Hand-
books in Operations Research and Management Sci-
ence, pages 331–434. Elsevier.
Rens., G., Raskin., J., Reynouard., R., and Marra., G.
(2021). Online learning of non-markovian reward
models. In Proceedings of the 13th International Con-
ference on Agents and Artificial Intelligence - Volume
2: ICAART, pages 74–86. INSTICC, SciTePress.
Sacco, A., Esposito, F., Marchetto, G., and Montuschi, P.
(2021). Sustainable task offloading in uav networks
via multi-agent reinforcement learning. IEEE Trans-
actions on Vehicular Technology, 70(5):5003–5015.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. CoRR, abs/1707.06347.
Scott, J. E. and Scott, C. H. (2017). Drone delivery models
for healthcare. In Hawaii International Conference on
System Sciences.
Singh, S., Jaakkola, T., and Jordan, M. I. (1994). Learn-
ing without state-estimation in partially observable
markovian decision processes. In International Con-
ference on Machine Learning.
Wang, Q., Zhang, W., Liu, Y., and Liu, Y. (2019). Multi-
uav dynamic wireless networking with deep rein-
forcement learning. IEEE Communications Letters,
23(12):2243–2246.
Yuan, T., Chung, H.-M., Yuan, J., and Fu, X. (2023).
Dacom: Learning delay-aware communication for
multi-agent reinforcement learning. Proceedings
of the AAAI Conference on Artificial Intelligence,
37(10):11763–11771.
Zhu, Z., Xie, N., Zong, K., and Chen, L. (2021). Building
a connected communication network for uav clusters
using de-maddpg. Symmetry, 13(8).
A Delay-Aware DRL-Based Environment for Cooperative Multi-UAV Systems in Multi-Purpose Scenarios
343
