
Using Fitts’ Law to Compare Sonification Guidance Methods for Target
Reaching Without Vision
Coline Fons
1,2
, Sylvain Huet
2
, Denis Pellerin
2
and Christian Graff
1
1
Univ. Grenoble Alpes, Univ. Savoie Mont-Blanc, CNRS, LPNC, 38000 Grenoble, France
2
Univ. Grenoble Alpes, CNRS, Grenoble INP, GIPSA-lab, 38000 Grenoble, France
Keywords:
Spatial Interaction, Fitts’ Law, Sound Guidance, Sonification, Visual Impairment, User Performance
Evaluation.
Abstract:
Visually impaired people often face challenges in spatial interaction tasks. Sensory Substitution Devices assist
them in reaching targets by conveying spatial deviations to the target through sound. Typically, sound guid-
ance systems are evaluated by target reaching times. However, reaching times are influenced by target size and
user-target distance, which varies across studies. We propose to explore the potential of Fitts’ law for evaluat-
ing such systems. In a preliminary experiment, visually impaired and sighted participants used non-spatialized
sonification to reach 3D virtual targets. Movement times were correlated with the Index of Difficulty, con-
firming that Fitts’ law is a valuable model to evaluate target-reaching in 3D non-visual interfaces, even with
non-spatialized sonification as feedback. In a second experiment, we compared two non-spatialized sonifi-
cations, one dissociating the height and azimuthal direction of the target, and the other combining them into
a single 3D angle. Fitts law did allow the comparison of performance in favor of the first sonification. The
potential of using Fitts’ law to compare performances across studies using different experimental settings de-
serves exploration in future research. We encourage researchers to provide the full linear regression equations
obtained when using Fitts’ law, to facilitate standardized performance comparisons across studies.
1 INTRODUCTION
Visually Impaired People (VIP) may experience diffi-
culties when they engage in spatial interaction tasks.
Some assistive technologies, like Sensory Substitu-
tion Devices (SSDs) offer a solution for assisting VIP
in various tasks. Guidance SSDs provide information
captured by an artificial sensor through a functional
sensory modality (e.g. audition or touch). In the spe-
cific case of target-reaching tasks, spatial information
about the deviation between the user’s position and
the target is usually converted into sound, to guide the
hand towards the target.
These sound guidance systems are usually eval-
uated by measuring performance by target-reaching
time and success rate. However, experimental param-
eters such as target size and distance from the tar-
get can have an impact on target-reaching time, in-
dependently of the sound guidance used. We need
a standardized measure, independent of experimental
parameters, to evaluate and compare sound guidance
systems. Fitts’ law is a widely used human prediction
model in HCI (Human-Computer Interaction), which
predicts the time taken to point at a target depending
on its size and distance to the user. In this paper, we
explore the potential of Fitts’ law to evaluate different
sound guidance systems in an identical experimental
design.
In the remainder of this section, we will intro-
duce SSDs that use sound to guide individuals to-
wards targets (section 1.1). We will then explain
Fitts’ law and how it could be used to evaluate point-
ing movements performance in target-reaching tasks
with auditory feedback (section 1.2). Next, we will
present our preliminary experiment that aims to estab-
lish whether Fitts’ law applies to pointing movements
without visual feedback when non-spatialized sonifi-
cation is employed to guide users to a 3D target (sec-
tion 2). Then, in a comparative experiment (section
3), we will demonstrate the application of Fitts’ law
as a standardized metric for evaluating sound guid-
ance systems by comparing the performances of two
types of sonification in a 3D virtual target reaching
task. Finally, we will summarize the findings from
the two experiments (section 4).
444
Fons, C., Huet, S., Pellerin, D. and Graff, C.
Using Fitts’ Law to Compare Sonification Guidance Methods for Target Reaching Without Vision.
DOI: 10.5220/0012346400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 444-454
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

1.1 Sensory Substitution Devices for
Guidance to a Target
In an Sensory Substitution Device (SSD) designed to
guide a blind person to a target object through sound,
the sensor collecting spatial data is usually a camera,
and is also the pointer (the reference frame in which
the target is positioned). The camera may be posi-
tioned on the participant’s head (Katz et al., 2012; Liu
et al., 2018; Thakoor et al., 2014; May et al., 2019;
Zientara et al., 2017; Guezou-Philippe et al., 2018),
or on their hand or forearm (Hild and Cheng, 2014;
Manduchi and Coughlan, 2014; Shih et al., 2018; May
et al., 2019; Zientara et al., 2017).
Once the spatial data collected, it may be encoded
into sound. The sounds used can be either verbal
instructions (e.g. ”turn” right”, ”go forward”, etc.)
(Hild and Cheng, 2014; Katz et al., 2012; Manduchi
and Coughlan, 2014; Shih et al., 2018; Thakoor et al.,
2014; Troncoso Aldas et al., 2020; Zientara et al.,
2017) or sonification. Sonification corresponds to the
use of non-verbal sounds to convey perceptual infor-
mation or data (Parseihian et al., 2016). There are two
types of sonification (Parseihian et al., 2016):
- Spatialized sonification consists in using the natu-
ral capacities of the auditory system to locate the
position of a target by virtually restituting its posi-
tion (e.g. by stereo or head-related transfer func-
tion (HRTF))(Katz et al., 2012; Liu et al., 2018;
Lokki and Grohn, 2005; May et al., 2019). In
other words, the participant is given the impres-
sion that the sound they hear is emitted from the
target’s position in space, for example by adjust-
ing the intensity of the sound in the right and left
ears.
- Non-spatialized sonification uses physical charac-
teristics of sounds, such as pitch, intensity, tempo,
etc., to convert spatial information (Katz et al.,
2012; Liu et al., 2018; Lokki and Grohn, 2005;
Manduchi and Coughlan, 2014; May et al., 2019;
Troncoso Aldas et al., 2020). For example, one
can use the tempo to indicate the distance between
the participant and the target, with a slow tempo
when the participant is far from the target, increas-
ing as they get closer to the target.
The auditory system’s ability to localize sound
sources being limited (Middlebrooks, 2015), we
chose to use non-spatialized sonification instead, con-
sidering the auditory system’s high performance in
perceiving certain sound parameters, such as pitch,
intensity, etc. (Ziemer and Schultheis (2019a) for re-
view).
1.2 Evaluation of Sound Guidance
Systems
Sound guidance systems’ performances can be evalu-
ated by real (Thakoor et al., 2014; Hild and Cheng,
2014; Manduchi and Coughlan, 2014; Shih et al.,
2018; Zientara et al., 2017; Troncoso Aldas et al.,
2020) or virtual (Liu et al., 2018; May et al., 2019;
Lokki and Grohn, 2005) target-reaching tasks. To
evaluate performance quantitatively, it is common
practice to measure target-reaching times on many
successive trials (Liu et al., 2018; Thakoor et al.,
2014; Manduchi and Coughlan, 2014; Shih et al.,
2018; May et al., 2019; Zientara et al., 2017; Tron-
coso Aldas et al., 2020; Lokki and Grohn, 2005), suc-
cess rates (Hild and Cheng, 2014; Shih et al., 2018;
May et al., 2019; Troncoso Aldas et al., 2020; Lokki
and Grohn, 2005) or hand trajectories (Liu et al.,
2018; May et al., 2019; Lokki and Grohn, 2005).
We focus here on another evaluation method,
Fitts’ law, which is an empirical model of the trade-off
between speed and accuracy in target-reaching tasks.
It predicts the time it takes a person to point at a tar-
get depending on the target’s size and user-target dis-
tance. Fitts quantified the difficulty of movement re-
quired to reach a target and thus created an Index of
Difficulty (ID):
ID = log
2
(
2A
W
) (1)
The unit of measurement of ID is the bit, which
is the amount of binary information required to rep-
resent the difficulty of the reaching task. The letter
A stands for amplitude and refers to the distance be-
tween the initial position of the pointer and the center
of the target. The letter W represents the width of the
target. The results of 1D target-pointing tests show
a strong correlation between ID and target-reaching
time. Pointing movements take longer when the tar-
get is small and remote. The complete formulation of
Fitts’ law is as follows:
MT = a + b ∗ log
2
(
2A
W
) (2)
with MT the movement time (the time it takes to
reach the target), and a- and b- constants derived em-
pirically by linear regression. The law is associated
with a performance measure known as Index of Per-
formance (IP) or throughput, which provides informa-
tion on the number of bits transferred in one second:
IP =
ID
MT
(3)
Although Fitts’ law was originally developed for
translational movements on one dimension, it works
Using Fitts’ Law to Compare Sonification Guidance Methods for Target Reaching Without Vision
445

well for 2D movements and is commonly used in
the performance evaluation of pointing devices (e.g.
like a mouse on a screen). Several studies also ap-
ply Fitts’ law to 3D pointing (Cha and Myung, 2013;
Clark et al., 2020; Barrera Machuca and Stuerzlinger,
2019; Murata and Iwase, 2001; Teather and Stuer-
zlinger, 2013), and pointing tasks without visual feed-
back (with haptic or sound feedback) (Charoenchai-
monkon et al., 2010; Lock et al., 2020; Marentakis
and Brewster, 2006; Hu et al., 2022). Fitts’ law can
therefore be used to describe the performance of a
sound guidance system towards 3D targets, as it pro-
vides a good explanation of the time taken to reach
the target in these experiments.
Fitts’ law could therefore be an appropriate tool
to evaluate and compare our sound guidance system.
In a first preliminary experiment, we tested the ap-
plicability of Fitts’ law to the characterization of 3D
virtual target reach in the absence of visual feedback,
using non-spatialized sonification. Participants had
to reach successive virtual targets of varying size and
user-target distance with their index finger, guided by
sound. As this preliminary experiment showed suc-
cessful for an application of Fitts’ law to evaluate per-
formance, we engaged in a comparative experiment to
demonstrate the application of Fitts’ law for evaluat-
ing sound guidance systems by comparing the perfor-
mances of two types of non-spatialized sonification in
an identical target-reaching task.
2 PRELIMINARY EXPERIMENT
2.1 Introduction
This first experiment aimed to test if Fitts’ law could
apply to 3D target reach guided by our sound guid-
ance system. We saw that most of SSDs use a camera
as both the sensor for collecting spatial data, and as
a frame of reference for pointing. Here we separate
the pointer from the sensor, using a motion capture
system. We propose a frame of reference built around
the hand, as it is central in a target-reaching task. We
chose use non-spatialized sonification as a feedback,
which provides more precise guidance than spatial-
ized sonification.
To evaluate this sound guidance system, we want
to use a standardized metric, independent of the tar-
get’s size of the user-target distance. We saw that
Fitts’ law has been used to describe the performance
of sound guidance system towards 3D targets (see
section 1.2). However, it is uncertain whether Fitts’
law applies to reaching a 3D target using only non-
spatialized sonification to convey the deviations be-
tween the user and the target’s position. Indeed, in
(Charoenchaimonkon et al., 2010), the auditory feed-
back was activated only when the pointer entered or
left the target. Lock et al. (2020) and Marentakis and
Brewster (2006) used only spatialized sonification.
Hu et al. (2022) tested the non-spatialized sonifica-
tion algorithm ”vOICe”: video streams were sounded
from left to right at a rate of one image snapshot per
second. Hearing sound from the left or the right ear
meant a visual object was on your left or your right
side, while the pitch and the loudness was mapped to
the vertical position and the brightness respectively.
However, the experiment did not show that Fitts’ law
can be applied to this sonification, as the participants
generally failed to find the targets. It is still unclear
whether Fitts’ law applies to reaching a 3D target
both in the absence of visual feedback and using non-
spatialized auditory cues to convert deviation to the
target.
Taking into account not only the advice in the
literature but also the cognitive load imposed on
the user, we created a non-spatialized sonification in
which: (1) The horizontal position is conveyed by the
angle deviation between the direction pointed by the
hand and the direction of the target. This angle is
transcoded into the pitch of the sound on a continu-
ous scale (the narrower the angle, the higher the pitch,
and vice versa); (2) The vertical position is conveyed
by the distance deviation between the height of the in-
dex finger and the height of the target. A mild binary
noise is superimposed on the main auditory stream
(within the same channel) when the finger is at the
same height as the target; (3) The depth is conveyed
by the distance deviation between the finger and the
target. This distance is translated into sound intensity
on a continuous scale (the shorter the distance, the
louder the sound);
As recommended by the literature (Charoenchai-
monkon et al., 2010; Lock et al., 2020; Marentakis
and Brewster, 2006; Hu et al., 2022) the vertical and
horizontal dimensions are orthogonal, so the partici-
pant can interpret them separately, and we used con-
tinuous scales to ensure accurate guidance. The use
of binary information to encode height should reduce
the amount of information to be integrated simultane-
ously and decrease cognitive load (Gao et al., 2022).
This sonification should provide sufficiently precise
guidance for the task, without imposing an excessive
cognitive load on the user.
This preliminary experiment aims to test if Fitts’
law applies to 3D target-reaching guided by non-
spatialized sonification. To do that, we tested the soni-
fication described above in a 3D target-reaching task
in a virtual environment.
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
446
2.2 Materials and Method
Participants. Six sighted people (22.0 ± 3.6 years
old) took part in the experiment. Two of them were
psychology students and received a one-point bonus
on a course of their choice in exchange for their par-
ticipation. The other four participants were students
from other disciplines recruited by the laboratory on
a voluntary basis. We also recruited two visually im-
paired participants (57.0 ± 9.9 years old)from outside
the laboratory. All participants gave their informed
consent before taking part in the study.
Engineering. Tests took the form of a virtual game
in which participants had to reach spheres in a 3-D
space with their index finger. A Vicon optical mo-
tion capture system located reflectors that were fixed
on the participant’s finger and torso. Coordinates of
these anatomical points were transmitted from the ac-
quisition computer running Vicon Tracker to the pilot
computer through the Virtual Reality Peripheral Net-
work (VRPN) protocol. In the pilot computer, our
C++ control software: 1) immersed the participant
into the virtual environment with the target, using the
OpenScene Graph (OSG) 3-D toolkit; 2) computed
spatial metrics used in sound conversions; 3) trans-
mitted them to the PureData sound system, running
on the same computer, which synthesized the sounds
accordingly and sent them to the participant; 4) drove
the experimental protocol.
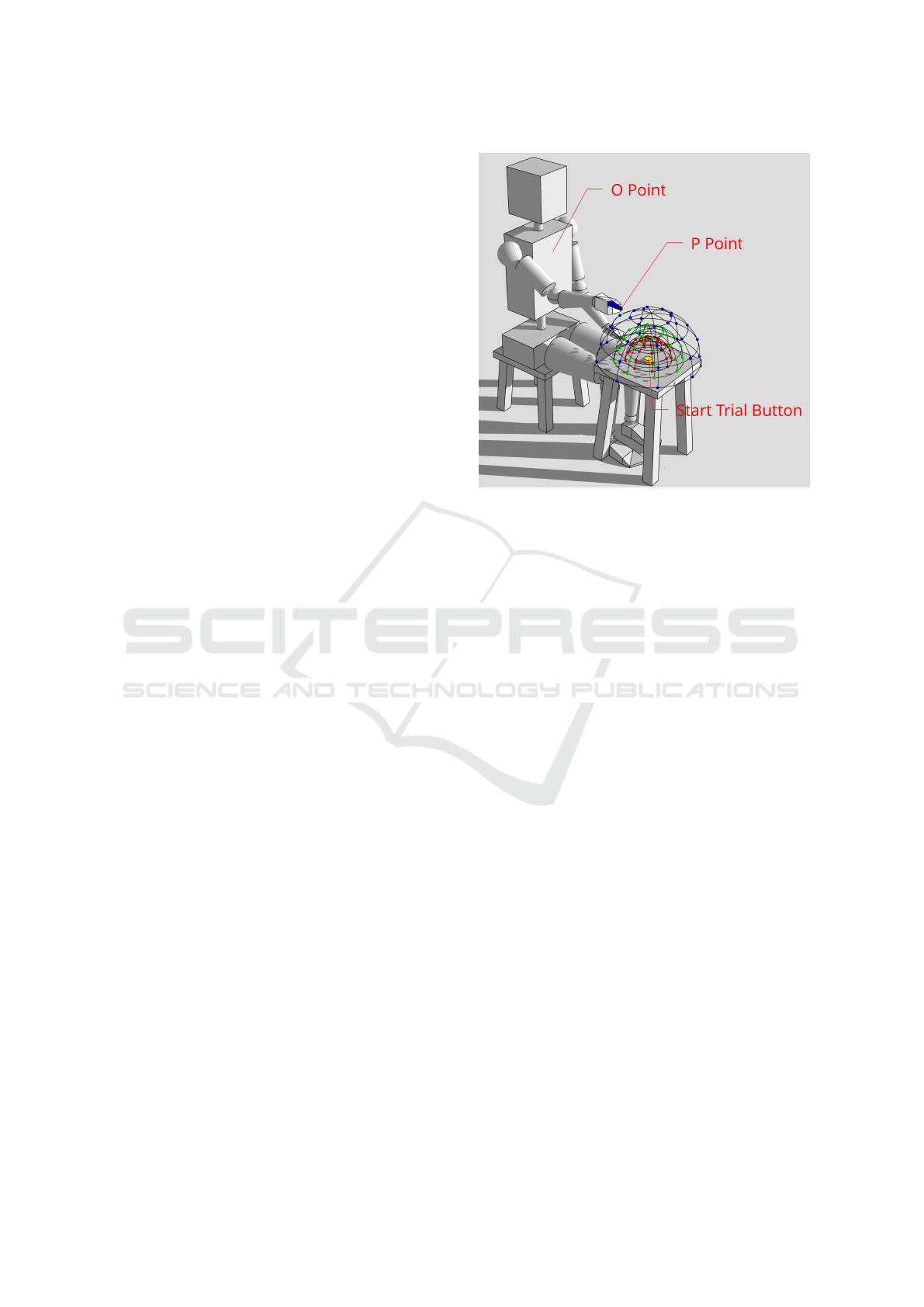
Each target was a sphere of 5.33, 8 or 12 cm di-
ameter, depending on the condition. Targets could be
placed 12 cm, 18 cm or 27 cm from the start trial but-
ton (see Figure 1, giving a total of 9 combinations of
distance and target size. There were 32 different po-
sitions for each distance. Each participant performed
3 different test blocks for each target size, for a to-
tal of 9 test blocks. A test block consisted of a se-
ries of 16 consecutive targets to be reached, selected
semi-randomly so that the participant reached half of
all possible targets, with an equal number of targets at
each distance, without repeating the same target twice
for the same target size. The sequence ensured that
the distance to the target varied between each trial.
Participants’ Equipment. During the experiment,
the participant was equipped with: (1) Two real ob-
jects that were fixed on their body that were located
by the Vicon system using reflectors fixed on them.
They defined the two points of the frame of reference:
O in the middle of the torso and P at the tip of the
index finger. (2) A bone conduction headset (After-
shokz Sportz3) connected to a receiver box (Mipro
MI909R) to receive the sound feedback.
Figure 1: Illustration of the experimental setup. The
−→
OP
vector define the participant’s pointing direction. The dis-
tance to the target is calculated from P to the center of the
target T. Possible positions of the target are represented by
circles. Targets can be positioned at 12 cm (red circles), 18
cm (green circles) or 27 cm (blue circles) from the starting
point (the start trial button).
Spatial Metrics. Several spatial features were ex-
tracted from the scene to be transcoded into sounds.
The
−→
OP vector defined the direction of the partici-
pant’s pointing and distance from target T. The spatial
metrics used were:
• The angle θ
h
=
[
POT
h
, which corresponds to the
projection of the angle formed by lines OP and
OT on the horizontal plane parallel to the ground
(angular deviation).
• The height difference ∆Z = |z
P
- z
T
|, which cor-
responds to the projection of the distance [PT] on
the vertical axis Z (distance deviation).
• The distance d = [PT] projected onto the horizon-
tal plane parallel to the ground (distance devia-
tion).
Sonification. We transcoded angle and distance de-
viations from the target into sound parameters. The
extracted spatial information is encoded by generat-
ing a sine wave which pitch varies as a function of θ
h
and intensity as a function of d. The height is encoded
separately as a superimposed white noise.
The pitch f of the sine wave varies on a continuum
from f min = 110 Hz for θ
h
max = 45
◦
to f max = 440
Hz for θ
h
min = 2
◦
, so that f is within the audible
spectrum while avoiding frequencies that are unpleas-
ant with a constant stimulus.
Using Fitts’ Law to Compare Sonification Guidance Methods for Target Reaching Without Vision
447

The conversion of angle θ
h
to pitch follows
Stevens’ (Stevens, 1957) psychophysical law, a
power-law function:
log( f ) = A f ∗ log(θ
h
) + B f (4)
A f =
log( f max) − log( f min)
log(θ
h
min) − log(θ
h
max)
= 0.44 (5)
B f = log( f min) − A f ∗ log(θ
h
max) = 1.30 (6)
The vertical dimension is coded by activating a
mild white noise when the participant points at the
same height as the target position, i.e. when ∆Z < r
(i.e. the radius of the sphere).
Finally, distance from the target is encoded by
sound intensity. The intensity of the sine wave varies
on a continuum with a 15 dB difference between Imin
(with dmax = 0.5 m) and Imax (with dmin = 0.01 m).
The conversion of distance into intensity follows the
following conversion function:
I = Ai ∗ log(d) +Bi (7)
Ai =
Imin − Imax
log(
dmax
dmin
)
= −8.83 (8)
Bi = Imin − Ai ∗ log(dmax) = 82.34 (9)
Our sonification thus dissociates the horizontal
and the vertical: the horizontal dimension is coded
by the pitch of the sound, while the vertical dimen-
sion is coded by the activation of an additional mild
white noise when the participant’s finger is at the cor-
rect height.
Additional sound cues to specify the finger’s tra-
jectory during the trials are given below.
Protocol. The experiment took place in the motion
capture space described above. Participants with their
eyes closed had to find several targets presented one
after the other. The experiment began with a train-
ing phase, consisting of a block of 4 trials per target
size, starting with the largest targets and ending with
the smallest. The participant could then do as many
blocks of trials as they felt necessary to become com-
fortable with the sonification and develop a search
strategy that suited them. During this phase, the par-
ticipant received explanations from the experimenter
on the difficulties that may arise and how to overcome
them. The session continued with the completion of
nine experimental blocks alternating target sizes, in a
counterbalanced order between participants. Only the
experimental blocks were used for statistics. From
the participant’s arrival to their departure, the ses-
sion lasted one hour, including all the steps mentioned
above.
Each block proceeded as follows: the participant
sat on a chair, with a stool placed in front of them.
They closed their eyes, and initiated the first trial by
pressing a start command button accessible through
touch, placed on the stool. A bell sound confirmed the
beginning of the trial. As described in detail in sec-
tion 2.2, from there, the participant heard the sound
feedback that changed according to their movements.
When the participant’s finger passed too far over the
target ([OP] > [OT]), a perfect fifth (in a musical
sense) was superimposed on the sine wave. The par-
ticipant therefore knew that they had passed the target,
but kept access to the pitch variations and therefore to
the directional information. When P (finger tip) en-
tered the target, the sine wave was interrupted and a
strong white noise was triggered. This strong white
noise was clearly distinct to that indicating the cor-
rect height. When the participant’s finger P remained
inside the target for 100 ms (ensuring that the target
was not reached by chance) a tingling sound indicated
victory; the sound feedback was deactivated and the
trial ended. The trial was also interrupted if the par-
ticipant failed to reach the target within 60 seconds,
and a different bell sound indicated defeat. After each
trial, the participant started the next one by pressing
the start button with their index finger P.
2.3 Results of the Preliminary
Experiment
There are several ways of analyzing the results of a
Fitts’ task. The most common way of assessing the
fit of the model to the data seems to be a linear re-
gression between Movement Time (MT) and Index of
Difficulty (ID) (see equation 2, section 1.2) by aver-
aging MT by ID, and then interpreting the R or R
2
obtained. A high value of R or R
2
is interpreted as
a good fit of the model to the data. This approach is
criticized: doing this is assuming the validity of Fitts’
law before testing it, as if Fitts’ law is valid, different
conditions of target sizes and distance to the target,
but the same ID, should have the same MT (Drewes,
2010; Triantafyllidis and Li, 2021). Furthermore, the
value of R or R² in itself says nothing about signifi-
cance, so we used an additional F-test to verify that
the R coefficient is statistically different from zero,
and thus check the fit of the model. We also looked
up the a- and b- constants (see equation 2). Constant
a- is the reaction time, and has seconds for units. Con-
stant b- has for units seconds per bit. It represents the
time needed to process one bit of information.
Here, five ID were calculated according to the
original formulation of Fitts’ law (equation 1). To
determine whether a Fitts-type response is occurring,
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
448
0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50
0
5
10
15
20
25
30
Index of Difficulty (bits)
Movement Time (s)
Par�cipant 1: R² = 0.74, p = 0.003
Par�cipant 2: R² = 0.83, p < .001
Par�cipant 3: R² = 0.78, p = 0.002
Par�cipant 4: R² = 0.76, p = 0.002
Par�cipant 5: R² = 0.54, p = 0.025
Par�cipant 6: R² = 0.76, p = 0.002
(a) Sighted participants (eyes closed)
0,00 0,50 1,00 1,50 2,00 2,50 3,00 3,50
0
5
10
15
20
25
30
Index of Difficulty (bits)
Movement Time (s)
Par�cipant 7: R² = 0.84, p < .001
Par�cipant 8: R² = 0.76, p = 0.002
(b) Visually impaired participants
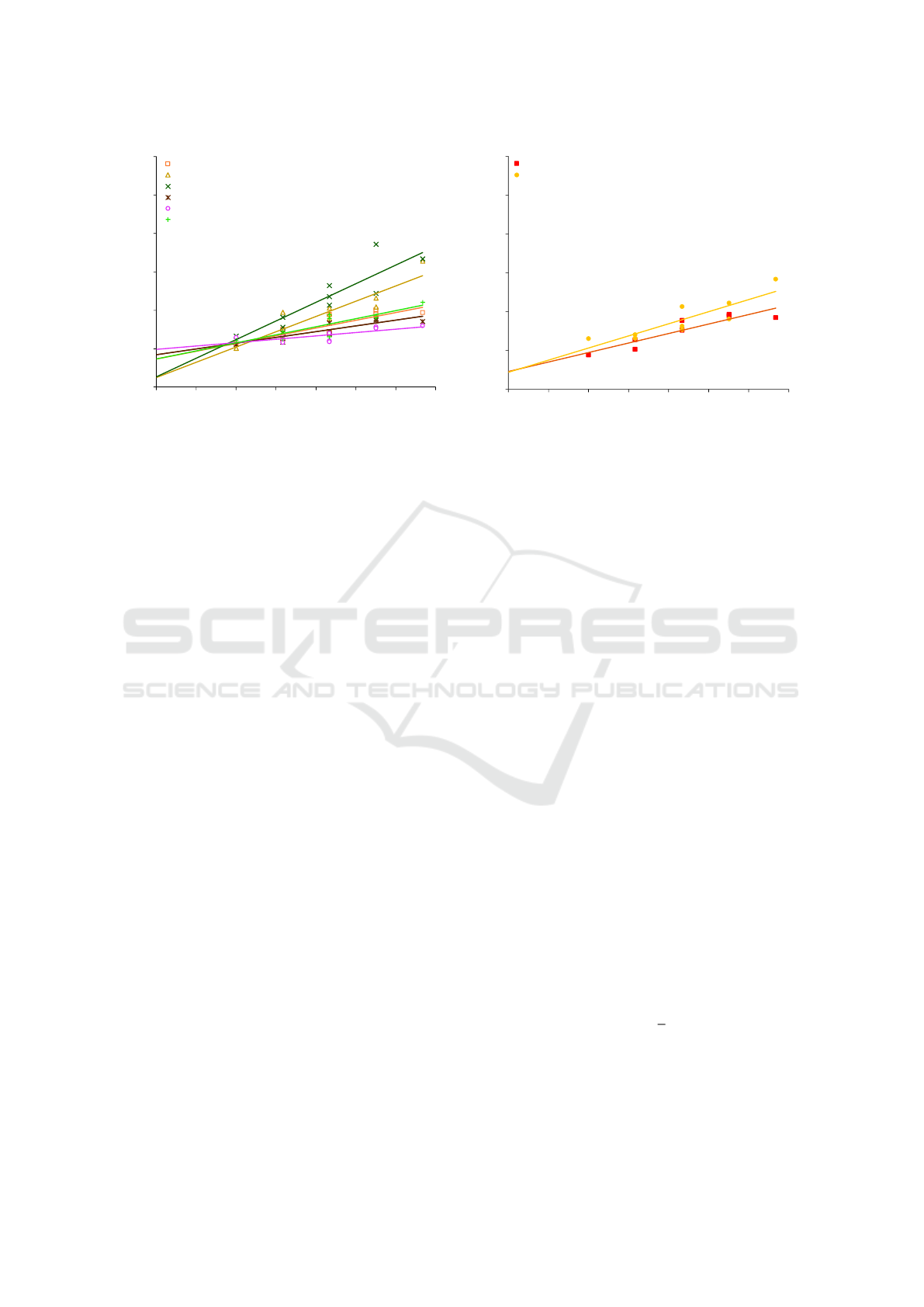
Figure 2: Linear regression lines for mean Movement Times (MT) as a function of Index of Difficulty (ID) for each participant.
we run a linear regression between MT and ID. Reach
times are averaged for each combination of size and
distance (9 combinations) as Fitts did in his study
(Fitts, 1954). The fit of the model to our data is
confirmed, with a R
2
of 0.93 for sighted participants
(F(1,7) = 96.07, p < .001), and 0.93 for visually im-
paired participants ((F(1,7) = 89.74, p < .001). Indi-
vidual regression lines of participants are represented
in Fig. 2. The complete equation obtained was, for
sighted participants:
MT = 3.17(±0.59) + 2.55(±0.26)ID (10)
And for visually impaired participants:
MT = 2.29(±0.66) + 2.75(±0.29)ID (11)
A post hoc power analysis was conducted using
G*Power version 3.1.9.7 (Faul et al., 2007) for power
estimation based on our results for the sighted par-
ticipants. A large effect size (13.29) was calculated
from the R² (.93) of the regression analysis. With a
significance criterion of α = .05, the statistical power
obtained is .99. The sample size used is thus adequate
to test the study hypothesis.
Finally, we computed the average IP with equa-
tion 3 for sighted and visually impaired participants.
We found an average IP of 0.36 bits/s for sighted par-
ticipants and 0.35 bits/s for visually impaired partici-
pants.
2.4 Discussion of the Preliminary
Experiment
Our study aimed to test the applicability of Fitts’
law to characterize target-reaching in a 3D virtual
environment with an auditory-feedback using non-
spatialized sonification. We performed linear regres-
sions between mean Movement Times (MT) and In-
dex of Difficulty (ID). The results on VIP were simi-
lar, assessing the usability of the device for them. As
expected, the results show that changes in ID values
have a consistent effect on target-reaching time. As a
result, Fitts’ law can be used to evaluate this type of
sound guidance system. We could therefore compare
the performance obtained in our study to other studies
in the literature that used Fitts’ law. The most com-
mon way of evaluating performance using Fitts’ law
is to use the Index of Performance (IP) (equation 3).
However, the use of IP to compare the perfor-
mances in two different target-reaching tasks should
be considered with reservation. Although the index
of performance was first defined by Fitts (1954) as
the average ratio of ID and MT (see equation 3), Zhai
(2004) shows that its value depends not only on both
a- and b- constant obtained through regression, but
also on the set of ID values used. Therefore, it can-
not be generalized beyond specific experimental tar-
get sizes and user-target distances. It is recommended
to report the full equation of the regression analysis,
with a- and b- constants, instead of using IP as the sole
performance characteristic of the device (Zhai, 2004;
Triantafyllidis and Li, 2021; Drewes, 2010). Fitts and
Radford (1966) actually defined in a later work IP as:
IP =
1
b
(12)
The b-constant corresponds to the slope of the lin-
ear relationship between ID and IP, and has the unit
seconds per bit. Looking at our equations 10 and 11
for sighted and visually impaired participants results
Using Fitts’ Law to Compare Sonification Guidance Methods for Target Reaching Without Vision
449

we can say that sighted participants took 2.55 seconds
per bit to process, while visually impaired participants
took 2.75 seconds per bit to process, or, using equa-
tion 12, that sighted participants processed 0.39 bits
per second, and visually impaired participants 0.36
bits per second. These IP differ from those calculated
with equation 3 and reported at the end of section 2.3.
The a- constant includes various noises in the re-
gression, such as reaction time and motor activation
time. The value of the a- constant changes according
to the formula used to compute the ID. A lot of paper
in HCI nowadays prefer the formulation of MacKen-
zie (1989):
ID = log
2
(
A
W
+ 1) (13)
However, this formulation is questioned by sev-
eral authors (Drewes, 2023; Hoffmann, 2013). Fur-
thermore, according to Drewes (2010, 2023), the a-
constant does not have the meaning of reaction time
when using Mackenzie’s formula. However, the in-
terpretation of the b- constant is the same. The b-
constant could therefore be a standardized metric to
evaluate and compare devices’ results across experi-
mental studies, whether these studies used Fitts’ for-
mulation or Mackenzie’s. Unfortunately, a lot of pa-
pers on Fitts’ law do not report the full equation of
the regression analysis; instead, they report only R,
R² and/or IP calculated with equation 3. This is the
case for Marentakis and Brewster (2006); Lock et al.
(2020); Hu et al. (2022); Meijer (1992), with which
a comparison would have been informative consider-
ing their studies on target-reaching guided by sound
evaluated by Fitts’ law.
Although using Fitts’ law to compare results
across studies remains a challenge, we see that the b-
constant of the linear regression is a metric which is
independent of experimental setting, and could there-
fore be used for comparison of performance between
studies. Hence, we encourage authors to report the
full equation of the regression analysis in future stud-
ies on Fitts’ law. In order to demonstrate the use
of Fitts’ law as a measure of performance compari-
son between guidance systems, we conducted a sec-
ond experiment with sighted participants. The second
experiment is similar to the first, with the exception
that each participant completed the task twice, once
with the same sonification as in the Preliminary Ex-
periment, and once with a new sonification, which we
will describe shortly.
3 COMPARATIVE EXPERIMENT
3.1 Introduction
The aim of this second experiment was to use Fitts’
law as a standardised metric to compare two sound
guidance settings. We created two non-spatialized
sonification and wanted to determine which one is
more effective in guiding a person deprived of sight
towards a virtual target in 3D space. The first sonifi-
cation used was the same as in the Preliminary Ex-
periment, which we will call Dissociated Vertical-
Horizontal (DVH) as it dissociates information from
the three spatial dimensions into two sound streams
(within the same channel). The second sonification,
Unified Vertical-Horizontal (UVH), on the contrary,
encodes spatial deviations to the target on the three
dimensions into a single sound stream, as recom-
mended in the literature (Ziemer et al., 2019; Ziemer
and Schultheis, 2019a,b). With UVH:
1. The horizontal and the vertical position are con-
veyed by the angle deviation between the direc-
tion pointed by the hand and the direction of the
target. This angle is transcoded into the pitch of
the sound on a continuous scale (the narrower the
angle, the higher the pitch, and vice versa);
2. The depth is conveyed by the distance deviation
between the finger and the target. This distance
is translated into sound intensity on a continu-
ous scale (the shorter the distance, the louder the
sound);
3. An additional mild white noise is activated when
the direction pointed by hand intersects the target.
Both sonifications encode the same number of
spatial dimensions and contain an equivalent amount
of sound information, including a sine wave and a
white noise. The unification of the vertical and hori-
zontal dimensions into a single angle is therefore the
only difference between UVH and DVH.
We hypothesized that performances would be bet-
ter with DVH than with UVH, as DVH allow par-
ticipants to interpret the vertical and horizontal sep-
arately, and the use of binary information should re-
duce the amount of information to be integrated and
decrease cognitive load (Gao et al., 2022).
The task was identical to that of the Preliminary
Experiment, except that participants completed the
experiment in two sessions, one in which the sound
feedback was the UVH sonification, and one in which
the sound feedback was the DVH sonification. To
compare performances between the two sonifications,
we used both classical reaching-times comparison,
and regression analysis between MT and ID.
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
450

3.2 Materials and Method
Participants. Five sighted people took part in the
experiment (19.2 ± 0.9 years old). Four of them were
psychology students who received a bonus point on a
course of their choice in exchange for their participa-
tion. The last one was recruited from outside the lab-
oratory. All gave their informed consent before taking
part in the study.
An a priori analysis was conducted using
G*Power version 3.1.9.7 for sample size estimation,
based on data from the preliminary experiment. With
a significance criterion of α = .05 and power = .95, the
minimum sample size needed with the effect size ob-
tained in the preliminary experiment (see section 2.3)
is N = 5. Thus, our sample size is adequate.
Materials. For information on this section, see sec-
tion 2.2 and 2.2. The only difference was that par-
ticipants performed the 9 test blocks twice, once for
UVH and one for DVH. The order in which sonifi-
cations were presented was counterbalanced between
participants.
Spatial Metrics Spatial metrics used for DVH were
identical as those described in section 2.2.
Spatial metrics used for UVH were distance d de-
scribed in section 2.2, and the angle θ =
d
POT , which
corresponds to the angle formed by lines OP and OT.
Therefore, horizontal and vertical deviations were en-
coded into a common metric using a single auditory
stream.
Sonification. DVH was identical as in the Prelimi-
nary Experiment (see section 2.2).
For UVH sonification, the spatial information ex-
tracted was encoded by generating a sine wave, just
as for DVH (see section 2.2 and equations 4, 5 and 6),
except that the pitch varied as a function of θ. Dis-
tance from the target was encoded by sound intensity,
in the same way as for DVH (see section 2.2 and equa-
tions 7, 8 and 9). A mild white noise was superim-
posed on the sine wave when the OP line intersected
the target.
Protocol. The same protocol as for the Preliminary
Experiment (section 2.2) was repeated twice, one for
the UVH sonification and one for the DVH sonifica-
tion. Two participants did UVH first and two others
did DVH first. The two sessions were spaced at least
24 hours apart.
3.3 Results of the Comparative
Experiment
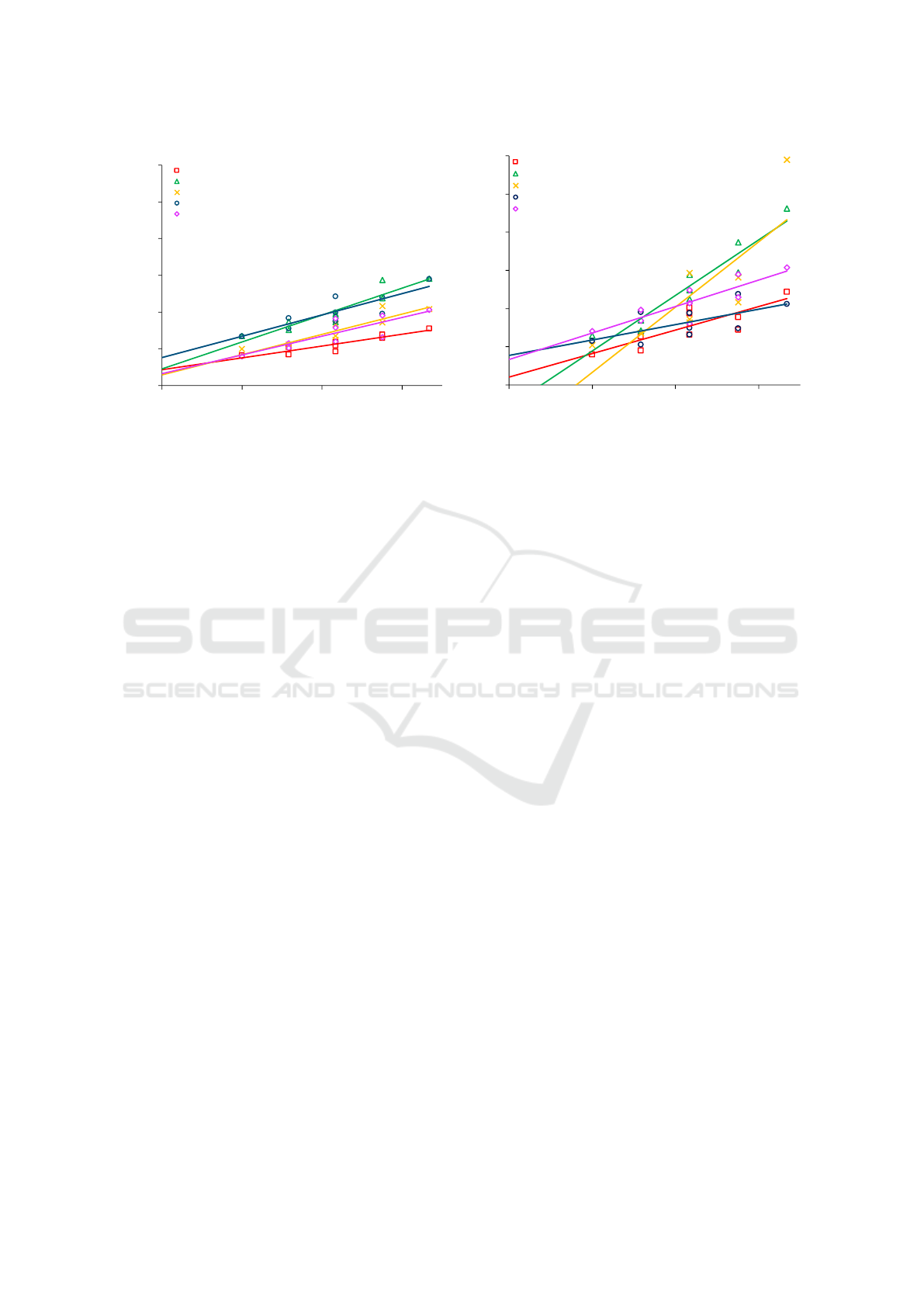
Fitts’ Law. We performed a linear regression on
MT as a function of ID for each sonification condi-
tion, in the same way as in the Preliminary Experi-
ment. The plotted individual regression lines for the
participants in each condition of sonification are rep-
resented in figure 3. The results show that in both
conditions, MT increased linearly as a function of ID.
The regression analysis of mean MT yielded signifi-
cant R² values of .83 for UVH (F(1, 7) = 35.30, p <
.001), and .91 for DVH (F(1, 7) = 73.27, p < .001).
The complete equation obtained was, for DVH:
MT = 2.24(±0.72) + 2.70(±0.32)ID (14)
And for UVH:
MT = −0.33(±1.87) + 4.88(±0.82)ID (15)
Movement Times. Participants took on average
10.21 seconds (SD = 8.26 s) to reach target with UVH
sonification and on average 8.09 seconds (SD = 5.09
s) with DVH sonification. To compare MT for the two
types of sonification, we used a Cox model, an ap-
propriate analysis for duration variable with skewed
distribution as we have it here (Letu
´
e et al., 2018). It
allows us to analyze repeated measures without av-
eraging the data for each participant, so it accounts
for intra- and inter-participant variability. To do this
we used the coxph function in the Survival package
of R software. Participants were significantly faster
to reach targets with DVH (z = 6.14, p < .001) than
with UVH.
3.4 Discussion of the Comparative
Experiment
This second experiment compared performance on a
3D target reaching task with two different types of
non-spatialized sonification. The following interest-
ing points emerge from these results:
- As in our preliminary experiment, results showed
that Fitts’ law is a valuable model to evaluate tar-
get reaching, even with non-spatialized sonifica-
tion (both DVH and UVH) as a feedback;
- Using Fitts’ law, we showed that performances
with DVH in the comparative experiment are sim-
ilar to performances with DVH in the preliminary
experiment.
Using Fitts’ Law to Compare Sonification Guidance Methods for Target Reaching Without Vision
451
0,00 1,00 2,00 3,00
0
5
10
15
20
25
30
Index of Difficulty (bits)
Movement Time (s)
Par�cipant 1_2DVH: R² = 0.85, p < .001
Par�cipant 2_1DVH: R² = 0.86, p < .001
Par�cipant 3_2DVH: R² = 0.82, p < .001
Par�cipant 4_1DVH: R² = 0.74, p = 0.003
Par�cipant 5_2DVH: R² = 0.70, p = 0.005
(a) DVH sonification
0,00 1,00 2,00 3,00
0
5
10
15
20
25
30
Index of Difficulty (bits)
Movement Time (s)
Par�cipant 1_1UVH: R² = 0.68, p = 0.006
Par�cipant 2_2UVH: R² = 0.90, p < .001
Par�cipant 3_1UVH: R² = 0.67, p = 0.007
Par�cipant 4_2UVH: R² = 0.41, p = 0.064
Par�cipant 5_1UVH: R² = 0.75, p = 0.003
(b) UVH sonification
Figure 3: Linear regression lines for mean Movement Times (MT) as a function of Index of Difficulty (ID) for each participant.
- Using Fitts’ law, we compared two different soni-
fication conditions; in the comparative experi-
ment, performances with DVH sonification are
higher than performances with UVH sonification.
By performing a linear regression analysis be-
tween MT and ID, we were able to show Fitts’ law
accurately models 3D non-visual target reaching with
non-spatialized sonification feedback. Indeed, in both
conditions of sonification, movement times signifi-
cantly increased with task difficulty (ID), which repli-
cates the findings of the Preliminary Experiment. We
find similar results for DVH sonification on this ex-
periment as we did for sighted participants in the Pre-
liminary Experiment, with a R² of 0.91 in the Com-
parative Experiment and 0.93 in the Preliminary Ex-
periment, and a slope of 2.70 s/bit in the Comparative
Experiment and 2.55 s/bit in the Preliminary Experi-
ment.
We discussed in section 2.4 that the b- constant
of the equation could be a good standardized metric
to compare sound guidance systems. Its reciprocal
(equation 12) is another version of the index of perfor-
mance (IP), and is the number of bits of information
processed in one second. We observe that the IP for
the DVH sonification (0.37 bits/s) is almost twofold
higher than the IP for the UVH sonification (0.20
bits/s). It means that participants took much more
time to reach targets with UVH than with DVH as task
difficulty increased. DVH sonification appears to be
more efficient than UVH as a feedback, as it enables
faster movement times across increasing IDs. The su-
periority of DVH over UVH is confirmed by compar-
ing the MT with a Cox model, which shows signifi-
cantly faster movements for DVH than for UVH.
The difference in performance between UVH and
DVH replicates previous studies (Fons et al., 2023).
UVH integrates spatial dimensions into a single au-
ditory stream using continuous scales. This pro-
vides precise and fast sound guidance, but hearing
all the information at the same time can create cog-
nitive overload, amplified by the fact that the verti-
cal and the horizontal dimensions are not orthogo-
nal. On the other hand, DVH uses two distinct sound
streams (within the same channel) to encode the ver-
tical and the horizontal dimensions. The dimensions
are therefore orthogonal, allowing the participant to
interpret them separately. Despite the use of two
sound streams, the fact that one of them is binary pre-
vents participants from having to switch their atten-
tion from one to the other, decreasing the cognitive
load (Gao et al., 2022). As a result, performances in
the target-reaching task are better with DVH than with
UVH.
4 CONCLUSION
In sound guidance systems, spatial information about
the deviation between the user’s position and the tar-
get is converted into sound to guide the pointing
movement towards the target. These systems are usu-
ally evaluated by measuring the time taken to reach
targets in a real or virtual target-reaching task in 3D
space. Here, we proposed to evaluate such sound
guidance systems by using Fitts’ law as a standard-
ized metric.
In a first preliminary experiment, sighted and visu-
ally impaired participants had to reach 3D virtual tar-
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
452

gets with their index finger guided by sounds. Results
showed that Fitts’ law is a valuable model to evaluate
target-reaching, even in 3D non-visual interfaces with
non-spatialized sonification as a feedback. In a sec-
ond comparative experiment, we used Fitts’ law as a
standardized metric to compare performances of two
sound guidance systems, using the slope of the lin-
ear regression between Movement Time (MT) and In-
dex of Difficulty (ID). Results showed the advantage
of using a non-spatialized sonification that dissociates
the vertical and horizontal information on the position
of the target into two sound streams (within the same
channel) over a non-spatialized sonification that uses
a single metric and sound stream for both dimensions.
Here, we have demonstrated the utility of Fitts’
law in comparing the performance of different sound
guidance systems within the same experimental con-
ditions. While target-reach time, a commonly used
metric for comparing guidance systems, is influenced
by target size and user-target distance, these experi-
mental parameters vary widely across studies. There-
fore, the potential of utilizing Fitts’ law to com-
pare performance across studies using different ex-
perimental settings deserves exploration in future re-
search. As a general practice, we encourage authors
to provide complete regression equations when em-
ploying Fitts’ law.
ACKNOWLEDGEMENTS
This work was supported by the Agence Nationale de
la Recherche (ANR-21CE33-0011-01). It was autho-
rized by the ethical committee CER Grenoble Alpes
(Avis-2018-06-19-1).
This work has been partially supported by ROBO-
TEX 2.0 (Grants ROBOTEX ANR-10-EQPX-44-01
and TIRREX ANR-21-ESRE-0015) funded by the
French program Investissements d’avenir.
REFERENCES
Barrera Machuca, M. D. and Stuerzlinger, W. (2019). The
effect of stereo display deficiencies on virtual hand
pointing. In Proceedings of the 2019 CHI conference
on human factors in computing systems, pages 1–14.
Cha, Y. and Myung, R. (2013). Extended fitts’ law for 3d
pointing tasks using 3d target arrangements. Interna-
tional Journal of Industrial Ergonomics, 43(4):350–
355.
Charoenchaimonkon, E., Janecek, P., Dailey, M. N., and
Suchato, A. (2010). A comparison of audio and tac-
tile displays for non-visual target selection tasks. In
2010 International Conference on User Science and
Engineering (i-USEr), pages 238–243. IEEE.
Clark, L. D., Bhagat, A. B., and Riggs, S. L. (2020). Ex-
tending fitts’ law in three-dimensional virtual environ-
ments with current low-cost virtual reality technol-
ogy. International journal of human-computer stud-
ies, 139:102413.
Drewes, H. (2010). Only one fitts’ law formula please!
In CHI ’10 Extended Abstracts on Human Factors in
Computing Systems, CHI EA ’10, page 2813–2822,
New York, NY, USA. Association for Computing Ma-
chinery.
Drewes, H. (2023). The fitts’ law filter bubble. In Extended
Abstracts of the 2023 CHI Conference on Human Fac-
tors in Computing Systems, CHI EA ’23, New York,
NY, USA. Association for Computing Machinery.
Faul, F., Erdfelder, E., Lang, A.-G., and Buchner, A. (2007).
G* power 3: A flexible statistical power analysis pro-
gram for the social, behavioral, and biomedical sci-
ences. Behavior research methods, 39(2):175–191.
Fitts, P. M. (1954). The information capacity of the human
motor system in controlling the amplitude of move-
ment. Journal of experimental psychology, 47(6):381.
Fitts, P. M. and Radford, B. K. (1966). Information capacity
of discrete motor responses under different cognitive
sets. Journal of Experimental psychology, 71(4):475.
Fons, C., Huet, S., Pellerin, D., Gerber, S., and Graff, C.
(2023). Moving towards and reaching a 3-d target by
embodied guidance: Parsimonious vs explicit sound
metaphors. In International Conference on Human-
Computer Interaction, pages 229–243. Springer.
Gao, Z., Wang, H., Feng, G., and Lv, H. (2022). Explor-
ing sonification mapping strategies for spatial auditory
guidance in immersive virtual environments. ACM
Transactions on Applied Perceptions (TAP).
Guezou-Philippe, A., Huet, S., Pellerin, D., and Graff,
C. (2018). Prototyping and evaluating sensory sub-
stitution devices by spatial immersion in virtual en-
vironments. In VISIGRAPP 2018-13th Interna-
tional Joint Conference on Computer Vision, Imag-
ing and Computer Graphics Theory and Applications.
SCITEPRESS-Science and Technology Publications.
Hild, M. and Cheng, F. (2014). Grasping guidance for vi-
sually impaired persons based on computed visual-
auditory feedback. In 2014 International Conference
on Computer Vision Theory and Applications (VIS-
APP), volume 3, pages 75–82. IEEE.
Hoffmann, E. R. (2013). Which version/variation of fitts’
law? a critique of information-theory models. Journal
of motor behavior, 45(3):205–215.
Hu, X., Song, A., Wei, Z., and Zeng, H. (2022). Stere-
opilot: A wearable target location system for blind
and visually impaired using spatial audio rendering.
IEEE Transactions on Neural Systems and Rehabili-
tation Engineering, 30:1621–1630.
Katz, B. F., Kammoun, S., Parseihian, G., Gutierrez, O.,
Brilhault, A., Auvray, M., Truillet, P., Denis, M.,
Thorpe, S., and Jouffrais, C. (2012). Navig: aug-
mented reality guidance system for the visually im-
paired. Virtual Reality, 16(4):253–269.
Using Fitts’ Law to Compare Sonification Guidance Methods for Target Reaching Without Vision
453

Letu
´
e, F., Martinez, M.-J., Samson, A., Vilain, A., and Vi-
lain, C. (2018). Statistical methodology for the anal-
ysis of repeated duration data in behavioral studies.
Journal of Speech, Language, and Hearing Research,
61(3):561–582.
Liu, Y., Stiles, N. R., and Meister, M. (2018). Aug-
mented reality powers a cognitive assistant for the
blind. ELife, 7:e37841.
Lock, J. C., Gilchrist, I. D., Gilchrist, I. D., Cielniak, G.,
and Bellotto, N. (2020). Experimental analysis of a
spatialised audio interface for people with visual im-
pairments. ACM Transactions on Accessible Comput-
ing (TACCESS), 13(4):1–21.
Lokki, T. and Grohn, M. (2005). Navigation with audi-
tory cues in a virtual environment. IEEE MultiMedia,
12(2):80–86.
MacKenzie, I. S. (1989). A note on the information-
theoretic basis for fitts’ law. Journal of motor behav-
ior, 21(3):323–330.
Manduchi, R. and Coughlan, J. M. (2014). The last meter:
blind visual guidance to a target. In Proceedings of the
SIGCHI Conference on Human Factors in Computing
Systems, pages 3113–3122.
Marentakis, G. N. and Brewster, S. A. (2006). Effects of
feedback, mobility and index of difficulty on deictic
spatial audio target acquisition in the horizontal plane.
In Proceedings of the SIGCHI conference on Human
Factors in computing systems, pages 359–368.
May, K. R., Sobel, B., Wilson, J., and Walker, B. N. (2019).
Auditory displays to facilitate object targeting in 3d
space. In The 25th International Conference on Audi-
tory Display (ICAD 2019). Georgia Institute of Tech-
nology.
Meijer, P. B. (1992). An experimental system for auditory
image representations. IEEE transactions on biomed-
ical engineering, 39(2):112–121.
Middlebrooks, J. C. (2015). Sound localization. Handbook
of clinical neurology, 129:99–116.
Murata, A. and Iwase, H. (2001). Extending fitts’ law to
a three-dimensional pointing task. Human movement
science, 20(6):791–805.
Parseihian, G., Gondre, C., Aramaki, M., Ystad, S., and
Kronland-Martinet, R. (2016). Comparison and eval-
uation of sonification strategies for guidance tasks.
IEEE Transactions on Multimedia, 18(4):674–686.
Shih, M.-L., Chen, Y.-C., Tung, C.-Y., Sun, C., Cheng, C.-
J., Chan, L., Varadarajan, S., and Sun, M. (2018).
Dlwv2: A deep learning-based wearable vision-
system with vibrotactile-feedback for visually im-
paired people to reach objects. In 2018 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 1–9. IEEE.
Stevens, S. (1957). On the physiological law. Psychol. Rev,
64:153–181.
Teather, R. J. and Stuerzlinger, W. (2013). Pointing at 3d
target projections with one-eyed and stereo cursors.
In Proceedings of the SIGCHI Conference on Human
Factors in Computing Systems, pages 159–168.
Thakoor, K., Mante, N., Zhang, C., Siagian, C., Weiland, J.,
Itti, L., and Medioni, G. (2014). A system for assisting
the visually impaired in localization and grasp of de-
sired objects. In European Conference on Computer
Vision, pages 643–657. Springer.
Triantafyllidis, E. and Li, Z. (2021). The challenges in mod-
eling human performance in 3d space with fitts’ law.
In Extended Abstracts of the 2021 CHI Conference on
Human Factors in Computing Systems, pages 1–9.
Troncoso Aldas, N. D., Lee, S., Lee, C., Rosson, M. B.,
Carroll, J. M., and Narayanan, V. (2020). Aiguide:
An augmented reality hand guidance application for
people with visual impairments. In The 22nd Inter-
national ACM SIGACCESS Conference on Computers
and Accessibility, pages 1–13.
Zhai, S. (2004). Characterizing computer input with
fitts’ law parameters—the information and non-
information aspects of pointing. International Journal
of Human-Computer Studies, 61(6):791–809.
Ziemer, T., Nuchprayoon, N., and Schultheis, H.
(2019). Psychoacoustic sonification as user inter-
face for human-machine interaction. arXiv preprint
arXiv:1912.08609.
Ziemer, T. and Schultheis, H. (2019a). Psychoacousti-
cal signal processing for three-dimensional sonifica-
tion. In The 25th International Conference on Audi-
tory Display (ICAD 2019). Georgia Institute of Tech-
nology.
Ziemer, T. and Schultheis, H. (2019b). Three orthogo-
nal dimensions for psychoacoustic sonification. arXiv
preprint arXiv:1912.00766.
Zientara, P. A., Lee, S., Smith, G. H., Brenner, R., Itti,
L., Rosson, M. B., Carroll, J. M., Irick, K. M., and
Narayanan, V. (2017). Third eye: A shopping assistant
for the visually impaired. Computer, 50(2):16–24.
HUCAPP 2024 - 8th International Conference on Human Computer Interaction Theory and Applications
454
