
Deep Reinforcement Learning Framework with Representation Learning
for Concurrent Negotiation
Ryoga Miyajima and Katsuhide Fujita
Tokyo University of Agriculture and Technology, Koganei, Tokyo, Japan
Keywords:
Automated Negotiation, Concurrent Negotiation, Multi-Agent System, Supply Chain Management, Rein-
forcement Learning, Representation Learning.
Abstract:
In the field of automated negotiation, significant attention has been paid to methods for learning negotia-
tion strategies using reinforcement learning. However, in concurrent negotiation, where negotiation proceeds
with multiple counterparties with various strategies in parallel, it is difficult to consider the differences in the
strategies of counterparties using the conventional formulation in which the state is defined using the bids of
both counterparties. In this study, we propose a reinforcement learning framework for learning negotiation
strategies that considers the strategy models of the negotiation partners in concurrent negotiations. Strategy
modeling is realized using embeddings with a representation function based on the unsupervised learning
of generative–discriminative representations from negotiation log data. Through evaluation experiments, we
show the performance of the representation function in identifying the strategies of negotiation partners and the
effectiveness of introducing the representation function into the reinforcement learning of negotiation strate-
gies.
1 INTRODUCTION
In the real world, agents in multi agent systems
(MAS) are typically not under integrated control for
various reasons, including different owners and dif-
ficulty in centralized control. Therefore, when each
agent acts according to its preferences, conflicts may
occur. In such cases, automated negotiation is attract-
ing attention as a technology for resolving conflicts
and reaching agreements. One of the applications of
automated negotiation is supply chain management
(SCM). In SCM, it is necessary to reach an agreement
with the factories that are counterparties to the supply
chain (SC) on contract terms for incoming and out-
going products. When an agent oversees the negotia-
tions with each factory, it is a concurrent negotiation
problem in which negotiations with multiple agents
are conducted in parallel, because there are typically
multiple candidate factories with which to do busi-
ness.
Recently, a method for learning negotiation strate-
gies using reinforcement learning (RL) has been pro-
posed for bilateral negotiation, but few for concur-
rent negotiation. In concurrent negotiation, opponent
agents typically have different strategies. Therefore,
it is necessary to learn the strategies of negotiation
partners to reach an agreement with each of them so
that individual utility can be fully obtained in the ne-
gotiation.
In this study, we propose an RL agent that takes
appropriate negotiation strategies according to the ne-
gotiation strategies of each of the multiple negotiat-
ing agents in automated negotiation for transactions
in SCM. When introducing RL into concurrent ne-
gotiation, it is difficult to consider the differences in
the strategies of the counterparties in the conventional
formulation. Therefore, we propose an RL frame-
work that introduces a modeling method of the strate-
gies of negotiation partners by representation learn-
ing and demonstrate the effectiveness through exper-
iments. Experiments are conducted in environments
with various combinations of negotiation partners and
evaluate the effectiveness of each of them and the ro-
bustness of the representation learning.
2 RELATED WORK
2.1 Automated Negotiation
Automated negotiation has attracted attention as a
method to resolve conflicts by reaching agreements
Miyajima, R. and Fujita, K.
Deep Reinforcement Learning Framework with Representation Learning for Concurrent Negotiation.
DOI: 10.5220/0012336000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 231-239
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
231

through negotiations between agents. The Automated
Negotiating Agent Competition (ANAC) is an inter-
national tournament to compete in the performance of
negotiating agents (Baarslag et al., 2015). ANAC has
various leagues with different scenarios, one of them
is Supply Chain Management League (SCML) (Mo-
hammad et al., 2019). SCML is the only league that
handles concurrent negotiation problems. In SCML,
negotiations are performed with factories in neigh-
boring layers of the SC on the unit price, quantity,
and delivery date of incoming and outgoing products.
One of the tracks held at SCML2022 was the OneShot
Track (Mohammad et al., 2022). In OneShot Track,
the SC has two layers and each factory cannot carry
over inventory to the next day or later. Thus, unsold
inventory is discarded at the end of the day. The agent
serves one factory in the SC and negotiates with the
agents in the other layer on the unit price and quantity
of the products to be traded. OneShot Track is a more
focused negotiation-only track than the other tracks
because it does not need to manage inventory across
days.
In recent years, significant attention has been
paid to methods for acquiring negotiation strategies
through RL. Bakker et al. proposed the RLBOA
framework as a framework that enables the learn-
ing of bidding strategies by RL in bilateral negotia-
tions (Bakker et al., 2019). Bagga et al. proposed
ANEGMA, an RL model for concurrent negotiation
in e-markets, which was efficient for negotiation part-
ners with a common strategy (Bakker et al., 2019).
2.2 Representation Learning
Grover et al. proposed a generic learning frame-
work for modeling agent behavior in MAS (Grover
et al., 2018). The method formulated MAS as an ex-
tension of the Partially Observed Markov Decision
Process (POMDP) and learned unsupervised a repre-
sentation function that embedded interaction episodes
with other agents in a real-valued vector for the objec-
tive of generative–discriminative representation.
The representation function f
θ
: E → R
d
is a func-
tion that embeds an interaction episode e ∈ E with
a particular agent in the MAS in a real-valued vec-
tor. It is learned unsupervised using past interaction
episodes for the following generative–discriminative
representations.
• Generative representations: Useful representa-
tions for simulating the policy of an agent
• Discriminative representations: Representations
that distinguish the policy of an agent from the
policies of other agents
Figure 1: The learning framework using representation
function (Grover et al., 2018).
Generative–discriminative representations are learned
by maximizing the objective function J, which is
computed using Equation (1).
J(θ) =
1
n
n
∑
i=1
E
e
+
∼E
i
,
e
∗
∼E
i
\e
+
∑
⟨o,a⟩∼e
+
logπ(a|o, f
θ
(e
∗
))
| {z }
imitation
−
λ
∑
j̸=i
E
e
−
∼E
j
[d
θ
(e
+
,e
−
,e
∗
)
| {z }
agent identification
]
,
d
θ
(e
+
,e
−
,e
∗
) =
(1 + exp(|| f
θ
(e
∗
) − f
θ
(e
−
)||
2
− || f
θ
(e
∗
) − f
θ
(e
+
)||
2
))
−2
,
(1)
where n denotes the number of the other agents, and
E
i
denotes the set of interaction episodes with A
i
. An
interaction episode e ∈ E
i
is a pair (o, a) of observa-
tions and actions in the interaction with A
i
.
The learning framework proposed by Grover et al.
that introduces a representational function is depicted
in Figure 1. The interaction episode e
t−1
between the
learning agent and agent A
i
when the learning agent
acts on the policy π
φ
t−1
and A
i
acts on the policy π
(i)
is embedded in a real-valued vector by the representa-
tion function f
θ
. The policy conditioned by this vector
determines the behavior.
3 CONCURRENT NEGOTIATION
PROBLEM IN SCM
3.1 Negotiation Environment in SCM
This study deals with the concurrent negotiation prob-
lem shown in Figure 2, which is a partially modified
environment used in SCML2022 OneShot Track (Mo-
hammad et al., 2022) implemented with NegMAS
(Mohammad et al., 2021). An agent is responsible for
one factory in a two-layer SC consisting of L
0
and L
1
and negotiates with agents in the layer. For simplic-
ity, this study assumes that there is only one agent.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
232
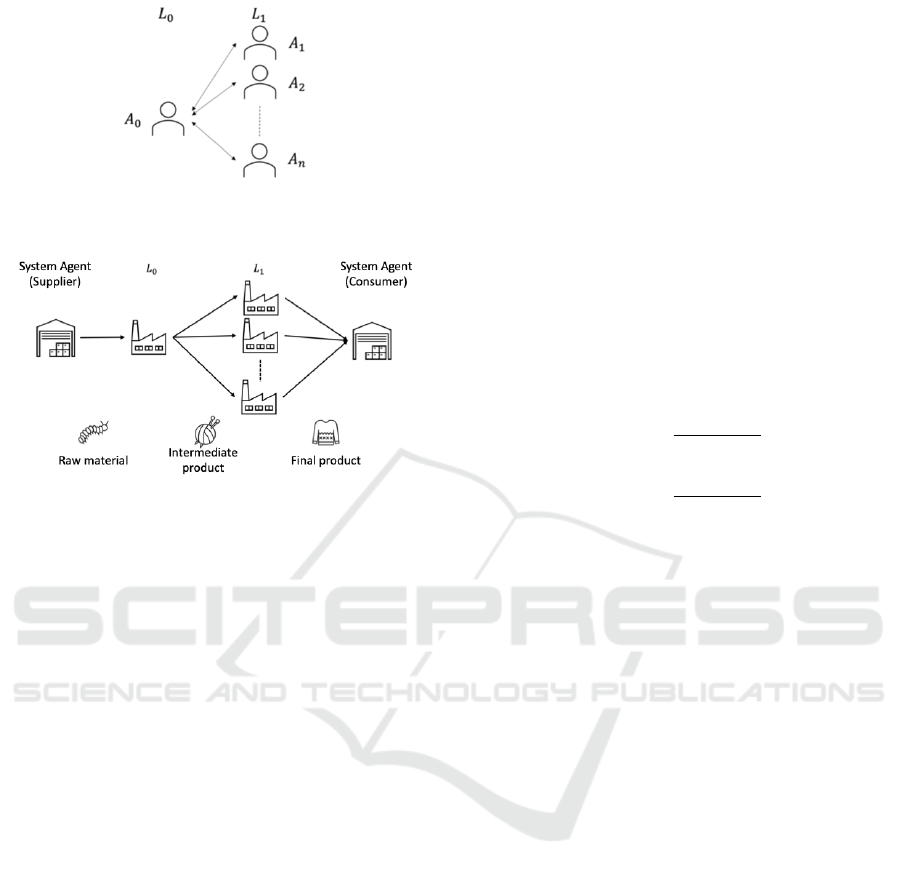
Figure 2: Concurrent negotiation problem handled in this
study.
Figure 3: Flow of products in the SC assumed in this study.
We denote the agent in L
0
as A
0
and the agents in L
1
as A
1
,A
2
,. ..,A
n
.
The flow of products in the SC assumed in this
study is depicted in Figure 3. Production and transac-
tions occur once a day. At the beginning of each day,
all agents receive exogenous contracts from the sys-
tem agents, which specify the unit price and quantity
of the raw materials the agent in L0 buys and the final
products the agents in L1 sell. Then, agents in L0 and
L1 negotiate the unit price and quantity of the inter-
mediate product traded between them. After all nego-
tiations are completed, the contracts are executed and
the products are produced at production cost. A dis-
posal cost is incurred for remaining materials accord-
ing to their trading value, and a penalty is imposed for
shortages against contracts according to their trading
value.
3.2 Negotiation Protocol
In this study, we use the alternating offers protocol
(AOP) (Rubinstein, 1982).In bilateral negotiations us-
ing the AOP, the two agents take turns proposing bids.
When one agent proposes to the other agent, the pro-
posed agent selects one of the following three actions.
• Accept: Accept the bid proposed by the other
agent.
• Offer: Reject the bid proposed by the other agent,
and propose its bid.
• EndNegotiation: Terminate negotiation without
reaching an agreement.
This is repeated until the negotiation is terminated
by Accept or EndNegotiation or until the number of
rounds is reached. In concurrent negotiation, an agent
proposes a bid to each of its counterpart agents and
selects an action to respond to each bid received from
its counterpart agents.
3.3 Utility Function
The utility function is a function that outputs the
utility value obtained by agreements. In this study,
for simplicity, all agents are assumed to determine
their utility values by the unit price v
p
c
p
only. This
means that the utility value U(ω) of a single bid
ω = (v
p
c
p
,v
q
c
q
) for A
0
is defined using Equation (2),
and that for A
1
,A
2
,. ..,A
n
is defined using Equation
(3).
U(ω) =
v
p
c
p
− v
p
min
v
p
max
− v
p
min
, (2)
U(ω) =
v
p
max
− v
p
c
p
v
p
max
− v
p
min
, (3)
where v
p
min
≤ v
p
c
p
≤ v
p
max
.
4 DEEP REINFORCEMENT
LEARNING FOR
CONCURRENT NEGOTIATION
4.1 Formulation of Concurrent
Negotiation Problem
We formulate the concurrent negotiation problem as a
Markov Decision Process (MDP) by focusing on ne-
gotiations between individual opponent agents. We
formulate the negotiation with agent A
i
as MDP
i
=
⟨S
i
,A
i
,r
i
,T ⟩. We describe the agent’s state, action,
and reward.
State s
I
∈ S
i
The state consists of the following four elements.
• Elapsed days normalized to [0,1], d/(D − 1).
• The negotiation round normalized to [0,1], r/(R−
1).
• The utility value of the bid that the learning agent
proposed to A
i
at the previous round, U(ω
for i
r−1
).
• The utility value of the bid that A
i
proposed to the
learning agent just before, U(ω
from i
r−1
).
Deep Reinforcement Learning Framework with Representation Learning for Concurrent Negotiation
233
Action a
I
∈ A
The action is the target utility of the bid next proposed
to agent A
i
, u
for i
target
.
Reward R
i
: S
i
× A
i
→ R
Rewards are granted for each negotiation round with
each counterparty. These rewards are divided into
three categories: agreement reaching, negotiation
failure, and continuation of negotiation.
• Reaching an agreement: The utility value of the
agreed bid ω, r
i
= U(ω).
• Negotiation failure: r
i
= −0.5
• Continuation of negotiation: Rewards are given in
the following cases according to the change in the
utility value of the bid of the opponent in the next
round.
– U(ω
from i
r−1
) = U (ω
from i
r
): r
i
= 0
– U(ω
from i
r−1
) > U (ω
from i
r
): r
i
= −0.01
– U(ω
from i
r−1
) < U (ω
from i
r
): r
i
= 0.01
4.2 Representation Function
We introduce a representation function to model the
strategies of the negotiating partners. The representa-
tion function f
θ
: E → R
d
is a function that embeds
the interaction episode e ∈ E with a particular agent
in a real-valued vector, as described in Section 2.2.
In this study, because the negotiation problem is for-
mulated as an MDP with each negotiation partner as
described in Section 4.1, and the state consists of its
proposal and that of the opponent, we consider the
state the interaction episode and use as the input to the
representation function. In learning the representation
function, the parameter θ is updated to maximize the
objective function J(θ) obtained using Equation (4).
J(θ) =
1
n
n
∑
i=1
E
e
+
∼E
i
,
e
∗
∼E
i
\e
+
∑
⟨s,a⟩∼e
+
logπ(a|s, f
θ
(e
∗
))−
λ
∑
j̸=i
E
e
−
∼E
j
[d
θ
(e
+
,e
−
,e
∗
)]
,
d
θ
(e
+
,e
−
,e
∗
) =
(1 + exp(|| f
θ
(e
∗
) − f
θ
(e
−
)||
2
− || f
θ
(e
∗
) − f
θ
(e
+
)||
2
))
−2
,
(4)
where e ∈ E
i
denotes the interaction episodes in one
day of the simulation, which are the time series data
up to the end of the negotiation of the state, action
pairs in the negotiation with agent A
i
. Furthermore,
the output of the representation function for the in-
put e ∈ E
i
is obtained by averaging the output of
the representation function in each state as f
θ
(e) =
1
n
e
∑
⟨s,a⟩∼e
f
θ
(s), where n
e
denotes the length of e.
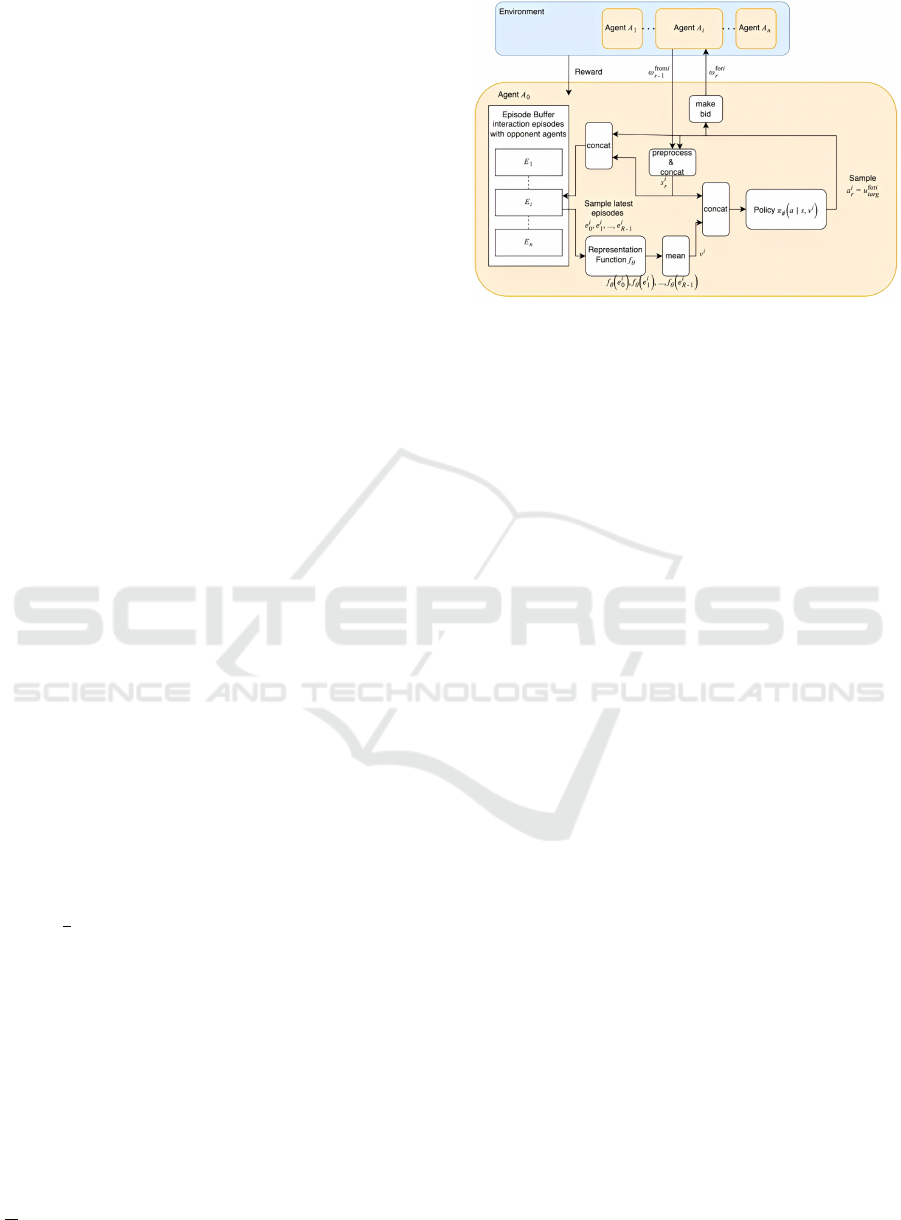
Figure 4: The proposed learning framework for concurrent
negotiation.
4.3 Learning Framework
The learning framework is depicted in Figure 4.
When the learning agent A
0
is proposed a bid ω
from i
r−1
by agent A
i
, it transits to state s
i
r
. This state s
i
r
is added
to buffer E
i
to hold the interaction episode with A
i
in concatenation with action a
i
r
that is subsequently
determined. The real-valued vector v
i
that models
the strategy of A
i
is obtained by averaging the output
of the representation function f
θ
for the interaction
episodes e
i
0
,e
i
1
,...,e
i
R−1
, which are the most recent in-
teraction episodes with A
i
and stored in E
i
. Then,
s
i
r
and v
i
are concatenated and input to the stochas-
tic policy π
φ
to select the action a
i
r
. The action a
i
r
selected here is the target utility u
for i
target
to make a bid
ω
for i
r
. The reward is given by the response of A
i
to the
proposal ω
for i
r
.
The policy π
φ
is updated by storing the states, ac-
tions, and rewards in a buffer and calculating the loss
from these stored data with all opponents at the end
of each day. Moreover, to update the representation
function f
θ
, it samples e
+
,e
∗
∼ E
i
,e
−
∼ E
j
from the
interaction episode buffer E
i
,E
j
(1 ≤ i, j ≤ n, i ̸= j)
and then update θ using the gradient of J(θ), which
is obtained using Equation (4). This is performed for
all (A
i
,A
j
) permutations of the two opponent agents.
The policy and representation function learn in paral-
lel during repeated simulations.
4.4 Learning Architecture
In this study, RL is performed using the actor–critic
because of its learning efficiency by simultaneously
improving the policy and estimating the value (Konda
and Tsitsiklis, 1999). The architecture is shown in
Figure 5 as the model diagram of the actor, Figure 6 as
that of the critic, and Figure 7 as that of the represen-
tation function. Both inputs of the actor and the critic
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
234

Figure 5:
Model diagram
of the actor.
Figure 6:
Model diagram
of the critic.
Figure 7: Model di-
agram of the repre-
sentation function.
are a concatenated vector of the state s and embedding
vector v. The output of the actor is the parameters of
the stochastic policy π
φ
with beta distribution, and the
output of the critic is the state value. The input of the
representation function is the state s, and the output is
the real-valued embedding vector.
5 EVALUATION EXPERIMENTS
5.1 Negotiation Environment Settings
The negotiation environment in this experiment is the
setting described in Section 3. That is, the learn-
ing agent A
0
is responsible for the L
0
factory in the
SC shown in Figure 3 and negotiates with the agents
A
1
,A
2
,. ..,A
n
responsible for the L
1
factories.
Configuration Parameters
The production costs for A
i
is p
i
produce
, which is sam-
pled by U (1, 10) if i = 0 otherwise 2U(1, 10) where
U(a,b) is the uniform distribution over [a,b]. The
shortfall penalty coefficient is 0.6, and the disposal
cost coefficient is 0.1. The quantity of raw materials
supplied by the exogenous contract per day is 10, and
the total quantity of final products demanded by the
exogenous contracts per day is also 10.
Opponent Agents
We use the four types of agents for L
1
factories. These
agents differ only in how to calculate their target util-
ity values u
target
. They propose a bid whose unit price
corresponds to u
target
according to Equation (3) and
whose quantity is the smaller of their required quan-
tity based on the exogenous contract and their agreed
contracts and the quantity proposed by the opponent
agent just before. They only accept a bid where its
utility value is not lower than u
target
of their next
proposal and its quantity is not more than their re-
quired quantity. In addition, they terminate negotia-
tion when the total quantity of intermediate products
contracted through negotiations exceeds the quantity
of final products demanded under the exogenous con-
tract. We describe below how to calculate u
target
for
each agent.
• TimeDependentAgent(TiD)
TiD concedes the target utility value ranging from
1 to 0 over time. The target utility value for the rth
round (0 ≤ r < R) of the TiD u
target
r
is determined
using Equation (5).
u
target
r
=
1 −
r
R − 1
e
(5)
The parameter e determines the shape of the con-
cession curve, and we adopt e = 0.2. The follow-
ing e parameters for CTD and Ada are also 0.2.
• CrampedTimeDependentAgent(CTD)
CTD concedes the target utility value ranging
from 1 to α(0 < α < 1) over time. The target
utility value for the rth round of the CTD u
target
r
is determined using Equation (6).
u
target
r
= α + (1 − α)
1 −
r
R − 1
e
(6)
In this experiment, we adopt α = 0.2.
• TitForTatAgent(TFT)
TFT determines the target utility value depending
on the opponent’s behavior. If the opponent con-
cedes, it also concedes, and if the opponent be-
comes bullish, it also becomes bullish. The target
utility value for the rth round of the TFT u
target
r
is
determined using Equation (7).
u
target
r
=
1 if r = 0, 1
U(ω
from i
r−2
)+ε
U(ω
from i
r−1
)+ε
U(ω
for i
r−1
) otherwise
(7)
The ε is a term to prevent zero division and abrupt
changes. In this experiment, we adopt ε = 0.1.
• AdaptiveAgent(Ada)
Ada determines the target utility value depending
on both time and the opponent’s behavior. Set-
ting the maximum utility value at that time of the
bid proposed by the opponent u
from i
max
as the lower
bound of the concession, the target utility value is
conceded over time. The target utility value for
the rth round of the Ada u
target
r
is determined us-
ing Equation (8).
u
target
r
= u
from i
max
+(1− u
from i
max
)
1 −
r
R − 1
e
(8)
Deep Reinforcement Learning Framework with Representation Learning for Concurrent Negotiation
235
5.2 Learning Bidding Strategy
We have A
0
learn the bidding strategy using the pro-
posed method described in Section 4. As a baseline,
we have A
0
learn without a representation function.
Hyperparameter Settings
In this experiment, we use actor–critic type PPO
(Schulman et al., 2017) as an RL algorithm. To
optimize actor and critic parameters, we use Adam
(Kingma and Ba, 2014) as the optimization func-
tion, with learning rates of 3 × 10
−6
for the actor and
1 ×10
−5
for the critic. The range ε of the clip of PPO
is 0.2. The number of learning epochs for actor and
critic updates is 200.
To optimize the parameters of the representation
function, we also use Adam as the optimization func-
tion, and the number of learning epochs is 2000. λ in
Equation (4) is 0.1, the length of the embedding vec-
tor output by the representation function is 16, and the
learning rate of the representation function is 10
−6
.
Learning Flow
The agent learns by repeating the following simula-
tions. One simulation runs for 50 days with a negoti-
ation round limit of 20. At the beginning of each day,
the interaction episodes of the previous day are input
into the representation function, and the average of
the outputs is used as the strategy model of the negoti-
ation partner. The state, action, and reward per round
are added to the buffer for each opponent. At the end
of the day, the interaction episodes are added to the
episode buffer for each opponent. The policy π
φ
is
updated by PPO using data stored in buffers at the end
of the simulation, and the representation function f
θ
is updated through unsupervised learning using data
stored in episode buffers for every 10 simulations.
The learning agent prioritizes bids aligning with
a target unit price, irrespective of quantity. It always
proposes a bid whose quantity is 1 and continues to
negotiate despite exceeding raw material quantities
from exogenous contracts.
5.3 Evaluation of RL Agent
Experimental Settings
For A
1
,A
2
,A
3
,A
4
, we perform 100 times simulations
in all 35 environments by selecting four agents from
TiD, CTD, TFT, and Ada, allowing for duplication.
As baselines for evaluating the performance of the
agent learned using the proposed framework with the
representation function, we use the agent learned by
the same RL method without the representation func-
tion and the four types of agents with heuristic strate-
gies, TiD, CTD, TFT, and Ada. We use the two
types of the number of simulations during learning,
N = 3000 and 30000, for both agents learned using
the proposed framework and without the representa-
tion function.
In the simulation for the evaluation, an RL agent
proposes a bid whose unit price corresponds to u
for i
target
according to Equation (2) and whose quantity is the
smaller of its required quantity based on the exoge-
nous contract and its agreed contracts or the quantity
proposed by the opponent agent just before. It only
accepts a bid in which its utility value calculated by
Equation (2) is not lower than u
for i
target
of its next pro-
posal and its quantity is not more than the quantity it
needs based on the exogenous contract and its agreed
contract. In addition, they terminate negotiation when
the total quantity of intermediate products contracted
through negotiations exceeds the quantity of raw ma-
terials received under the exogenous contract.
Evaluation Indicators
We use four indicators to evaluate the experimental
results.
• Final Score: The profit rate.
• Agreement Rate: The rate of days an agreement
is formed with each type of opponent agent.
• Agreement Utility: The averaging utility value of
the agreed bids with each type of opponent agent.
• Intra-Inter Clustering Ratios(IICR):
IICR is the average distance between points be-
longing to the same cluster relative to the aver-
age distance between points belonging to differ-
ent clusters. If there are n clusters of points in the
space, and T
i
is the set of n
i
points in cluster i, the
IICR is calculated using Equation (9).
IICR =
1
n
∑
n
i=1
1
n
2
i
∑
n
i
a=1
∑
n
i
b=1
||t
(i)
a
−t
(i)
b
||
2
1
n(n−1)
∑
n
i=1
∑
n
j̸=i
1
n
i
n
j
∑
n
i
a=1
∑
n
j
b=1
||t
(i)
a
−t
( j)
b
||
2
(9)
In this study, we use the IICR to evaluate the ro-
bustness of embedding vectors output by the rep-
resentation function.
5.4 Experimental Results & Discussion
Evaluation by Final Score
We show the mean values of the final scores of the
agent learned using the proposed framework with
the representation function (Emb), the agent learned
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
236

without the representation function (No Emb), TiD,
CTD, TFT, and Ada in Table 1. As listed in Table
1, regardless of whether the representation function is
used, RL agents earned higher scores than heuristic
agents (TiD, CTD, TFT, Ada). Therefore, by the for-
mulation proposed in this study, RL agents can learn
effective strategies, regardless of whether the repre-
sentation function is used.
As shown in Table 1, the agent that learned
30000 simulations without the representation func-
tion earned a higher score than the agent that learned
30000 simulations with the representation function.
We discuss the reasons for this. Because the repre-
sentation function is learned with discriminative rep-
resentation as one of its objectives, it outputs a dis-
criminative vector for each opponent agent. This vec-
tor enables the agent to perform RL by distinguish-
ing between the strategies of its opponents. In this
case, because the input to the representation function
is the state of the negotiation with each agent, the in-
formation obtained from the output of the represen-
tation function can be regarded as latent information
in the state. Therefore, we consider that the RL of
30000 simulations without the representation function
achieved a high final score in the experiment because
the agents learned while distinguishing the strategies
of opponents directly from the state. Conversely, RL
by adding the embeddings output by the representa-
tion function to the state would have increased the
size of the state space. Thus we could not obtain a
very good strategy with representation functions.
Evaluation by Agreement Rate
We show the mean values of the agreement rates of
RL agents and heuristic agents for each opponent
agent in Table 2.
As listed in Table 2, the agent learned without the
representation function had a lower agreement rate
with CTD than the agent learned with the represen-
tation function, TiD, CTD, and Ada. As shown in Ta-
ble 2, the agent learned with the representation func-
tion had a higher agreement rate with CTD than the
other agents whether the number of simulations. One
of the reasons that the agent learned without the rep-
resentation function had a lower agreement rate with
CTD is that it had obtained a too-bullish strategy. Be-
cause it learns to earn a high utility in negotiations
with any agents, including TiD, with which the maxi-
mum utility it can earn upon agreement is higher than
that with CTD, the agent learned without the repre-
sentation function frequently proposes a bid whose
utility value for it is higher than that with CTD can
accept. Conversely, the agent learned with the rep-
resentation function had a high agreement rate with
CTD because the embedding vector output by the rep-
resentation function enabled it to learn to distinguish
CTD from the other agents, including TiD.
As shown in Table 2, the agent learned for
30000 simulations with the representation function
had a lower agreement rate with TFT than the agent
learned for 30000 simulations without the represen-
tation function. One of the reasons for this is that
the states taken in negotiations with TFT are signif-
icantly different from the states taken in negotiations
with the other agents. If the RL agent can distinguish
TFT from the other agents only by the state, the em-
bedding vector output by the representation function
is redundant and prevents learning.
Evaluation by Agreement Utility
We show the mean values of the agreement utilities
of RL agents and heuristic agents for each opponent
agent in Table 3.
As listed in Table 3, regardless of the presence
or absence of the representation function, an agent
learned for 30000 simulations earned a higher agree-
ment utility than an agent learned for 3000 simula-
tions. Therefore, in the early stage of learning, an
agent learns to increase the agreement rate and then
learns to increase the agreement utility.
As shown in Table 3, the agent learned with the
representation function earns higher agreement utility
in the negotiation with CTD and Ada, whereas the
agent learned without representation function earns
higher agreement utility in the negotiation with TiD
and TFT. In negotiations with CTD and Ada, the state
transitions are similar to those of TiD. However, CTD
differs from TiD in the acceptable utility value in the
end, and Ada differs from TiD in that it becomes more
aggressive when its opponent agent concedes. There-
fore, by introducing the representation function and
learning in a more discriminative manner, it obtained
higher agreement utility. Conversely, TiD is a sim-
ple strategy, making it relatively easy to learn effec-
tive strategies. The state transitions in negotiations
with TFT are significantly different from those taken
in negotiations with other agents. Therefore, in ne-
gotiations in TiD and TFT, the agent learned without
the representation function obtained higher agreement
utility because the embedding vector was redundant.
Evaluation of Robustness of Embeddings
We show the mean values of IICR of the embedding
vector output by the representation function trained in
30000 simulations in the case more than one type of
agent is included in the opponents in Table 4. IICR
is smaller if the opponents include TFT and larger
Deep Reinforcement Learning Framework with Representation Learning for Concurrent Negotiation
237
Table 1: Means of the final scores.
Emb
(N = 3000)
Emb
(N = 30000)
No Emb
(N = 3000)
No Emb
(N = 30000)
TiD CTD TFT Ada
1.16 1.24 1.19 1.47 1.03 1.04 0.97 1.04
Table 2: Means of agreement rates with each opponent.
A
0
Opponent
TiD CTD TFT Ada
Emb(N = 3000) 0.93 0.92 0.91 0.85
Emb(N = 30000) 0.93 0.90 0.85 0.92
No Emb(N = 3000) 0.92 0.83 0.92 0.82
No Emb(N = 30000) 0.93 0.84 0.93 0.80
TiD 0.89 0.89 0.88 0.89
CTD 0.89 0.89 0.89 0.89
TFT 0.89 0.81 0.0 0.17
Ada 0.89 0.89 0.88 0.89
Table 3: Means of agreement utilities with each opponent.
A
0
Opponent
TiD CTD TFT Ada
Emb (N = 3000) 0.66 0.72 0.64 0.72
Emb (N = 30000) 0.73 0.77 0.65 0.77
No Emb (N = 3000) 0.85 0.66 0.72 0.27
No Emb(N = 30000) 0.97 0.70 0.84 0.59
TiD 0.47 0.43 0.68 0.36
CTD 0.52 0.48 0.68 0.44
TFT 0.33 0.36 0.00 0.23
Ada 0.57 0.51 0.60 0.46
if they include both CTD and Ada. Therefore, al-
though the representation function discriminates TFT
more strongly, it cannot accurately discriminate be-
tween CTD and Ada.
6 CONCLUSION & FUTURE
WORK
In this study, we proposed an RL framework that in-
troduces representation learning for concurrent nego-
tiation and formulated a concurrent negotiation prob-
lem. The proposed RL framework considers the dif-
ferences in opponent strategies using a representation
function that is learned unsupervised from negotia-
tion log data with each opponent agent for generative–
discriminative representation. We defined states, ac-
tions, and rewards using utility values and conducted
Table 4: IICR(Best 3 and Worst 3).
Opponents IICR Opponents IICR
TFT-Ada-Ada-Ada 0.26 CTD-CTD-Ada-Ada 0.94
CTD-CTD-TFT-TFT 0.26 CTD-CTD-CTD-Ada 0.93
TFT-TFT-TFT-Ada 0.26 CTD-Ada-Ada-Ada 0.93
evaluation experiments using agents learned via RL
using the proposed framework. The results showed
that the RL agents scored higher values than the
heuristic agents. Although the agent learned with the
representation function earned a lower final score than
the agent learned without the representation function,
in certain cases, there was an improvement in the
agreement rate and agreement utility with each agent.
One of our future works is to investigate a method
for advantaged negotiation even in a test environment
where opponent agents use different strategies from
one used in learning. In general, the opponents’ be-
haviors are unknown in advance, so it is necessary to
establish a method for efficiently fine-tuning in the ac-
tual test environment after learning it in advance using
opponents with various strategies.
REFERENCES
Baarslag, T., Aydo
˘
gan, R., Hindriks, K. V., Fujita, K., Ito,
T., and Jonker, C. M. (2015). The automated negoti-
ating agents competition, 2010–2015. AI Magazine,
36(4):115–118.
Bakker, J., Hammond, A., Bloembergen, D., and Baarslag,
T. (2019). Rlboa: A modular reinforcement learning
framework for autonomous negotiating agents. In The
17th International Conference on Autonomous Agents
and Multiagent Systems, pages 260–268.
Grover, A., Al-Shedivat, M., Gupta, J., Burda, Y., and Ed-
wards, H. (2018). Learning policy representations in
multiagent systems. In International conference on
machine learning, pages 1802–1811. PMLR.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Konda, V. and Tsitsiklis, J. (1999). Actor-critic algorithms.
Advances in neural information processing systems,
12.
Mohammad, Y., Greenwald, A., Fujita, K., Klein,
M., Morinaga, S., and Nakadai, S. (2022).
Supply chain management league (oneshot).
http://www.yasserm.com/scml/scml2022oneshot.pdf.
Mohammad, Y., Nakadai, S., and Greenwald, A. (2021).
Negmas: A platform for automated negotiations. In
PRIMA 2020: Principles and Practice of Multi-Agent
Systems: 23rd International Conference, Nagoya,
Japan, November 18–20, 2020, Proceedings 23, pages
343–351. Springer.
Mohammad, Y., Viqueira, E. A., Ayerza, N. A., Greenwald,
A., Nakadai, S., and Morinaga, S. (2019). Supply
chain management world: a benchmark environment
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
238

for situated negotiations. In PRIMA 2019: Principles
and Practice of Multi-Agent Systems: 22nd Interna-
tional Conference, Turin, Italy, October 28–31, 2019,
Proceedings 22, pages 153–169. Springer.
Rubinstein, A. (1982). Perfect equilibrium in a bargaining
model. Econometrica: Journal of the Econometric
Society, pages 97–109.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Deep Reinforcement Learning Framework with Representation Learning for Concurrent Negotiation
239
