Fault Tree Reliability Analysis via Squarefree Polynomials
Milan Lopuha
¨
a-Zwakenberg
University of Twente, Enschede, The Netherlands
Keywords:
Fault Trees, Reliability Analysis, Polynomial Algebra.
Abstract:
Fault tree (FT) analysis is a prominent risk assessment method in industrial systems. Unreliability is one of the
key safety metrics in quantitative FT analysis. Existing algorithms for unreliability analysis are based on binary
decision diagrams, for which it is hard to give time complexity guarantees beyond a worst-case exponential
bound. In this paper, we present a novel method to calculate FT unreliability based on algebras of squarefree
polynomials and prove its validity. We furthermore prove that time complexity is low when the number of
multiparent nodes is limited. Experiments show that our method is competitive with the state-of-the-art and
outperforms it for FTs with few multiparent nodes.
1 INTRODUCTION
Fault trees. Fault trees (FTs) form a prominent risk
assessment method to categorize safety risks on in-
dustrial systems. A FT is a hierarchical graphical
model that shows how failures may propagate and
lead to system failure. Because of its flexibility and
rigor, FT analysis is incorporated in many risk assess-
ment methods employed in industry, including Fault-
Tree+ (IsoTree, 2023) and TopEvent FTA (Reliotech,
2023).
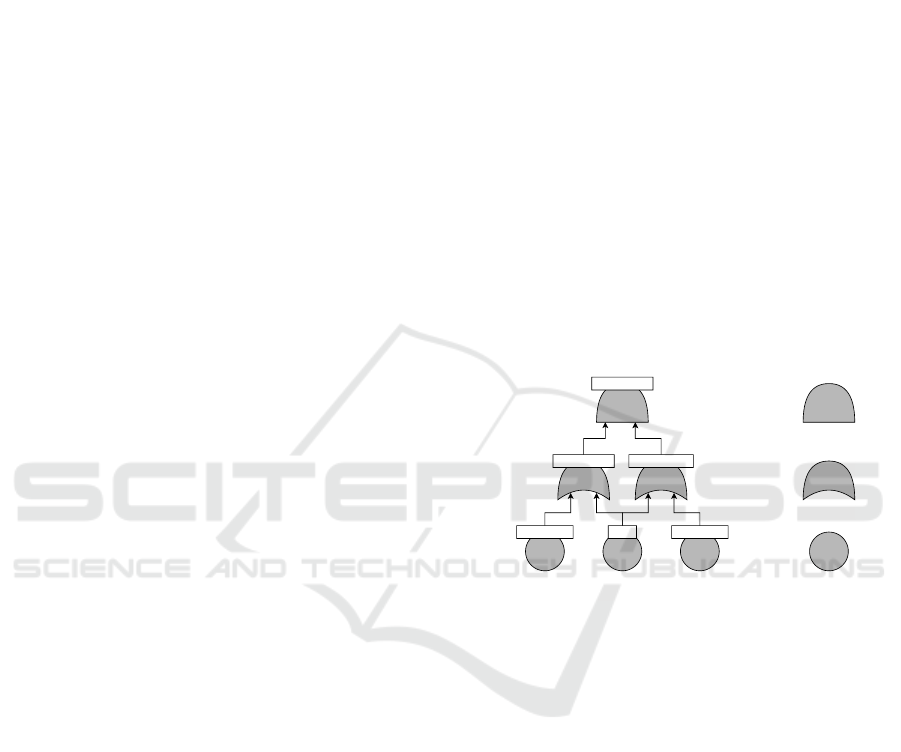
A FT is a directed acyclic graph (not necessarily a
tree) whose root represents system failure. The leaves
are called basic events (BEs) and represent atomic
failure events. Intermediate nodes are AND/OR-
gates, whose activation depends on that of their chil-
dren; the system as a whole fails when the root is ac-
tivated. An example is given in Fig. 1.
Quantitative analysis. Besides a qualitative analy-
sis of what sets of events cause overall system fail-
ure, FTs also play an important role in quantitative
risk analysis, which seeks to express the safety of the
system in terms of safety metrics, such as the total
expected downtime, availability, etc. An important
safety metric is (un)reliability, which, given the fail-
ure probability of each BE, calculates the probability
of system failure. As the size of FTs can grow into the
hundreds of nodes (Ruijters et al., 2019), calculating
the unreliability efficiently is crucial for giving safety
and availability guarantees.
There exist two main approaches to calculating
unreliability (Ruijters and Stoelinga, 2015). The first
Left engine fails Right engine fails
Right rotor fails Left rotor failsNo fuel
AND
OR
BE
Aircraft fails
Figure 1: A fault tree for a small aircraft. The aircraft fails
if both its engines fail; each engine fails if either its rotor
fails or it has no fuel (the plane has a single fuel tank).
approach works bottom-up, recursively calculating
the failure probability of each gate. This algorithm is
fast (linear time complexity), but only works as long
as the FT is actually a tree. However, nodes with mul-
tiple parents (DAG-like FTs) are necessary to model
more intricate systems. For such FTs, as we show in
this paper, calculating unreliability is NP-hard. The
main approach for such FTs is based on translating
the FT into a binary decision diagram (BDD) and per-
forming a bottom-up analysis on the BDD. This BDD
is of worst-case exponential size, though heuristics
exist. The BDD corresponding to an FT depends on
a linear ordering of the BEs, with different orderings
yielding BDDs of wildly varying size; although any
single one of them can be used to calculate unrelia-
bility, finding the optimal BE ordering is an NP-hard
problem in itself. As a result, it is hard to give guar-
antees on the runtime of this unreliability calculation
algorithm in terms of properties of the FT.
Lopuhaä-Zwakenberg, M.
Fault Tree Reliability Analysis via Squarefree Polynomials.
DOI: 10.5220/0012334000003645
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 12th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2024), pages 39-49
ISBN: 978-989-758-682-8; ISSN: 2184-4348
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
39

Contributions. In this paper, we present a radical
new way for calculating unreliability for general FTs.
The bottom-up algorithm does not work for DAG-like
FTs, since it does not recognize multiple copies of the
same node in the calculation, leading to double count-
ing. In our approach we amend this by keeping track
of nodes with multiple parents, as these may occur
twice in the same calculation. Then, instead of propa-
gating failure probabilities as real numbers, we prop-
agate squarefree polynomials whose variables repre-
sent the failure probabilities of nodes with multiple
parents; keeping these formal variables allows us to
detect and account for double counting. Furthermore,
to keep complexity down we replace formal variables
with real numbers whenever we are able. At the root
all formal variables have been substituted away, yield-
ing the unreliability as a real number.
This approach has as advantage over BDD-based
algorithms that we are able to give upper bounds to
computational complexity. Most of the complexity
comes from the fact that we do arithmetic with poly-
nomials rather than real numbers. However, if the
number of multiparent nodes is limited, these poly-
nomials have limited degree, and computation is still
fast. We prove this formally, by showing that the time
complexity is linear when the number of multipar-
ent nodes is bounded, and in experiments, in which
we compare our method to Storm-dft (Basg
¨
oze et al.,
2022b), a state-of-the-art tool for FT analysis using a
BDD-based approach: here our method is competitive
in general and is considerably faster for FTs with few
multiparent nodes.
Summarized our contributions are the following:
1. A new algorithm for fault tree reliability analysis
based on squarefree polynomial algebras;
2. A proof of the algorithm’s validity and bounds on
its time complexity;
3. Experiments comparing our algorithm to the
state-of-the-art.
An artefact of the experiments is available at (Lop-
uha
¨
a-Zwakenberg, 2023a). Furthermore, a version of
this paper including proofs of the mathematical state-
ments is available at (Lopuha
¨
a-Zwakenberg, 2023b).
2 RELATED WORK
There exists a considerable amount of work on FT re-
liability analysis. FTs were first introduced in (Wat-
son, 1961). A bottom-up algorithm to calculate their
reliability is presented in (Ruijters and Stoelinga,
2015), which is a formalization of mathematical prin-
ciples that have been used since the beginning of FT
analysis. This algorithm works only for FTs that are
actually trees, i.e., do not contain nodes with multiple
parents. In (Rauzy, 1993), a BDD-based method for
calculating reliability was introduced that also works
for DAG-shaped FTs. This method is still the state
of the art, although some improvements have been
made, notably by tweaking variable ordering to ob-
tain smaller BDDs (Bouissou et al., 1997) and divid-
ing the FT into so-called modules that can be handled
separately (Rauzy and Dutuit, 1997).
FTs are also used to model the system’s reliabil-
ity over time. The failure time of each BE is mod-
eled as a random variable (typically exponentially dis-
tributed), and additional gate types are introduced to
model more elaborate timing behavior. Reliability
analysis of these dynamic FTs is done via stochastic
model checking (Basg
¨
oze et al., 2022b).
3 FAULT TREES
In this section, we give the formal definition of fault
trees (FTs) and their reliability used in this paper. For
us FTs are static (only AND/OR gates), and each ba-
sic event v is assigned a failure probability p(v). Thus
we define:
Definition 3.1. A fault tree (FT) is a tuple T =
(V, E,γ,p) where:
• (V, E) is a rooted directed acyclic graph;
• γ is a function γ: V → {OR, AND, BE} such that
γ(v) = BE if and only if v is a leaf;
• p is a function p : BE
T
→ [0,1], where BE
T
=
{v ∈ V | γ(v) = BE}.
Note that a FT is not necessarily a tree as gates
may share children. The root of T is denoted R
T
. For
a node v, we let ch(v) be the set of children of v.
The structure function determines, given a gate
and a safety event, whether the event succesfully
propagates to the gate. Here we model a safety event
as the set of BEs happening, which can be encoded as
a binary vector
~
f ∈ B
BE
T
, where f
v
= 1 denotes that
the BE v occurs in the event. The structure function is
then defined as follows.
Definition 3.2. Let T = (V,E,γ,p) be a FT.
1. A safety event is an element of B
BE
T
.
2. The structure function of T is the function
S
T
: V × B
BE
T
→ B defined recursively by
S
T
(v,
~
f ) =
f
v
, if γ(v) = BE,
W
w∈ch(v)
S
T
(w,
~
f ), if γ(v) = OR,
V
w∈ch(v)
S
T
(w,
~
f ), if γ(v) = AND.
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
40

3. A safety event
~
f such that S
T
(R
T
,
~
f ) = 1 is called
a cut set; the set of all cut sets is denoted CS
T
.
Quantitative analysis of a FT is typically done via
its unreliability, i.e., the probability of a cut set occur-
ring, where each BE v has probability p(v) of happen-
ing. The BE failure probabilities are considered to be
independent. The reasoning behind this is that when
they are not independent, this is due to some common
cause; this common cause should then be explicitely
modeled in the FT framework, by replacing the two
non-independent BEs with sub-FTs that share com-
mon nodes (Pandey, 2005).
Definition 3.3. Let T = (V,E,γ,p) be a FT. Let
~
F ∈
B
BE
T
be the random variable defined by P(F
v
= 1) =
p(v) for all v ∈ BE
T
, and all these events are indepen-
dent. Then the unreliability of T is defined as
U(T) = P(
~
F ∈ CS
T
)
=
∑
~
f ∈CS
T
∏
v: f
v
=1
p(v)
∏
v: f
v
=0
(1 − p(v)).
Example 3.4. Consider the FT T from Fig. 1. Ab-
breviating BE names, assume p(rrf) = p(lrf) = 0.4
and p(nf) = 0.3. Furthermore, write
~
f ∈ B
BE
T
as
f
rrf
f
nf
f
lrf
. Then CS
T
= {010,011,101,110,111}, so
U(T ) = 0.6 · 0.3 · 0.6
+ 0.6 · 0.3 · 0.4
+ 0.4 · 0.7 · 0.4
+ 0.4 · 0.3 · 0.6
+ 0.4 · 0.3 · 0.4 = 0.412.
The unreliability U(T ) represents the probability
of failure of the system modeled by the fault tree and
is crucuial to providing safety and availability guar-
antees. The expression in Definition 3.3 becomes too
large to handle for large FTs very quickly; thus it is
important to find efficient solutions to the following
problem.
Problem 3.5. Given a FT T , calculate U(T ).
Unfortunately, we show that this problem is NP-
hard. The reason for this is that with appropriately
chosen probabilities, one can find from U(T ) a mini-
mal element of CS
T
, and finding such a so-called min-
imal cut set is known to be NP-hard (Rauzy, 1993).
Theorem 3.6. Problem 3.5 is NP-hard.
3.1 Existing U(T ) Algorithms
There are two prominent algorithms for calculating
U(T ). The first one calculates, for each node v, the
probability g
v
= P(S
T
(v,
~
F) = 1) bottom-up (Ruijters
and Stoelinga, 2015). For BEs one has g
v
= p(v). For
a b
e
c
g
d e
f
h
0.5 0.5 0.5
0.5
Figure 2: An example FT with failure probabilities.
an AND-gate, one has g
v
=
∏
w∈ch(v)
g
w
as long as the
events S
T
(w,
~
F) = 1 are independent as w ranges over
all children of v. This happens when no two children
of v have any shared descendants. For OR-gates one
likewise has g
v
= 1 −
∏
w∈ch(v)
g
w
. This gives rise to
a linear-time algorithm that calculates g
v
bottom-up.
Unfortunately, this algorithm only works for FTs that
have a tree structure: as soon as a node has multiple
parents, the independence assumption will be violated
at some point in the calculation.
The second algorithm (Rauzy, 1993) works for
general FTs, and works by translating the Boolean
function S
T
(R
T
,−) into a binary decision diagram,
which is a directed acyclic graph, in which the eval-
uation of the function at a boolean vector is repre-
sented by a path through the graph. After the BDD
is found, U(T ) can be calculated using a bottom-up
algorithm on the BDD, whose time complexity is lin-
ear in the size of the BDD. Unfortunately, the size
of the BDD is worst-case exponential, although this
worst case is seldomly attained in practice (Rauzy and
Dutuit, 1997; Bobbio et al., 2013). To construct the
BDD, one first has to linearly order the variables; find-
ing the order that minimizes BDD size is an NP-hard
problem, although heuristics exist (Valiant, 1979; L
ˆ
e
et al., 2014).
4 AN EXAMPLE OF OUR
METHOD
Before we dive into the details of our method, we
go through an example to showcase how the method
works and to motivate the technical sections.
Consider the FT of Fig. 2. In a bottom-up method,
we calculate the failure probability g
v
of each node v:
thus for the BEs we have g
a
= g
b
= g
c
= g
g
= 0.5.
For d, the bottom-up method dictates that we should
calculate g
d
= g
a
+ g
b
− g
a
g
b
. However, this will
Fault Tree Reliability Analysis via Squarefree Polynomials
41

cause problems at f , since d and e share b as child,
and so their failure probabilities will not be indepen-
dent. Thus, at d, we modify g
d
to ‘remember’ its de-
pendence on b. We do so by introducing a formal
variable L
b
representing b’s failure probability, yield-
ing g
d
= g
a
+ L
b
− g
a
L
b
= 0.5 + 0.5L
b
. We also get
g
e
= 0.5 + 0.5L
b
. Note that we only introduce a for-
mal variable for b, and not for a and c, as the latter
only have one parent node and thus have no chance of
appearing twice in the same calculation.
At f , we calculate g
f
= g
d
g
e
= 0.25 + 0.5L
b
+
0.25L
2
b
. Here we introduce the rule L
2
b
= L
b
, so that
g
f
= 0.25 + 0.75L
b
. The idea behind this is that
we use multiplication to determine the possibility of
two events occurring simultaneously. Since L
b
rep-
resents P(S
T
(b,
~
F) = 1), the term L
2
b
actually repre-
sents P(S
T
(b,
~
F) = 1 ∧ S
T
(b,
~
F) = 1). This is equal
to P(S
T
(b,
~
F) = 1), so L
2
b
= L
b
.
At this point, the graph structure tells us that b
cannot appear twice in the same calculation any more.
Thus we can safely substitute g
b
= 0.5 for L
b
in g
f
=
0.25 + 0.75L
b
, yielding g
f
= 0.625. Finally, we get
g
h
= g
f
g
g
= 0.3125.
In the following sections, we introduce two math-
ematical tools needed to apply this method in greater
generality. In Section 5 we review the graph-theoretic
notion of dominators, which will tell us for which
nodes we need to introduce formal variables and at
what point they can be substituted away. In Section
6 we formalize the polynomial algebra in which our
arithmetic takes place.
5 PRELIMINARIES I:
DOMINATORS
In this section we review the concept of dominators
and apply them to FTs. We need this to determine at
what point in the bottom-up calculation, outlined in
the previous section, we can replace a formal variable
L
v
with the expression g
v
. Informally, a dominator of
v is present on all paths from the root to v.
Definition 5.1. (Prosser, 1959) Let T = (V,E, γ, p) be
a FT.
1. Define a partial order on V by x y iff there is
a path y → x in T .
2. Given two nodes v,w ∈ V , we say that w dominates
v if v ≺ w and every path R
T
→ v in T contains w.
The set of dominators of a node is nonempty and
has a minimum:
Lemma 5.2. (Lengauer and Tarjan, 1979) If v 6= R
T
,
then there is a unique w dominating v such that each
w
0
dominating v satisfies w w
0
; this w is called the
immediate dominator of v, denoted w = id(v).
Example 5.3. In Fig. 2, the dominators of a are d, f ,
and h, and id(a) = d. The dominators of b are f and
h, and id(b) = f . Note that d is not a dominator of b,
since the path h → f → e → b does not pass through
d.
The immediate dominator is interesting to us
since, as we will see later, at id(v) we can replace L
v
by g
v
. The following result relates the relative posi-
tion of v and w to that of their immediate dominators.
Lemma 5.4. If v ≺ w, then either id(v) w or
id(w) id(v).
To use these definitions in an algorithmic context,
we will make use of the following result:
Theorem 5.5. (Lengauer and Tarjan, 1979) Given T ,
there exists an algorithm of time complexity O(|E|)
that finds id(v) for each v ∈ V .
6 PRELIMINARIES II:
SQUAREFREE POLYNOMIAL
ALGEBRAS
In this second preliminary section, we formally de-
fine the algebras in which our calculations take place.
These are similar to multivariate polynomial algebras,
except in every monomial every variable can have de-
gree at most 1.
Definition 6.1. Let X be a finite set. We define the
squarefree real polynomial algebra over X to be the
algebra A(X) consisting of formal sums
α =
∑
Y ⊆X
α
Y
∏
x∈Y
L
x
,
where the L
x
are formal variables and α
Y
∈ R. Ad-
dition and multiplication are as normal polynomials,
except that they are subject to the law L
2
x
= L
x
for all
x ∈ X; that is,
(α + β)
Y
= α
Y
+ β
Y
,
(α · β)
Y
=
∑
Y
0
,Y
00
⊆X :
Y
0
∪Y
00
=Y
α
Y
0
β
Y
00
.
Example 6.2. Let X = {x, y}. Let α = 2 + L
x
+ L
y
and β = L
x
+ 3L
x
L
z
. Coefficientwise, α is described
as
α
X
=
2, if X = ∅,
1, if X = {x} or X = {y},
0, if X = {x, y}.
Furthermore, α + β = 2 + 2L
x
+ L
y
+ 3L
x
L
z
, and
α · β = α · L
x
+ α · (3L
x
L
z
)
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
42

= (2L
x
+ L
x
+ L
x
L
y
) + (6L
x
L
z
+ 3L
x
L
z
+ 3L
x
L
y
L
z
)
= 3L
x
+ L
x
L
y
+ 9L
x
L
z
+ 3L
x
L
y
L
z
.
Note that if X ⊆ X
0
, an α ∈ A (X) can also be con-
sidered an element of A(X
0
), by taking α
Y
= 0 when-
ever Y 6⊆ X. For two sets X and Y this also allows us
to add and multiply α ∈ A(X ) and β ∈ A (Y ), by con-
sidering both to be elements of A (X ∪Y ). In the rest
of this paper we will do this without comment.
Besides multiplication and addition, another im-
portant operation that we need is the substitution of a
formal variable by a polynomial. This works the same
as with regular polynomials.
Definition 6.3. Let X,Y be finite sets and x ∈ X \Y .
Let α ∈ A (X) and β ∈ A(Y ). Then the substitution
α[L
x
7→ β] is the element of A (X \ {x} ∪Y ) obtained
by replacing all instances of L
x
by β; more formally,
α[L
x
7→ β] is expressed as
β ·
∑
Z⊆X :
x∈Z
α
Z
∏
x
0
∈Z\{x}
L
x
0
+
∑
Z⊆X :
x /∈Z
α
Z
∏
x
0
∈Z
L
x
0
!
.
In terms of coefficients this is expressed as
α[L
x
7→ β]
Z
= α
Z
+
∑
x∈Z
0
⊆X,
Z
00
⊆Y :
Z
0
\{x}∪Z
00
=Z
α
Z
0
β
Z
00
where α
Z
= 0 if Z 6⊆ X.
Note that in this definition the multiplication and
addition are of elements of A(X \{x} ∪Y ).
Example 6.4. Continuing Example 6.2, the substitu-
tion β[L
z
7→ α] is equal to
β[L
z
7→ α] = L
x
+ 3L
x
· (2 + L
x
+ L
y
)
= 10L
x
+ 3L
x
L
y
.
In what follows, we will need three results on cal-
culation in A(X). The first result considerably sim-
plifies the substitution operation.
Lemma 6.5. Let x,α,β be as in Definition 6.3. Then
α[L
x
7→ β] = α[L
x
7→ 1] · β + α[L
x
7→ 0] · (1 − β).
The second result shows how substitution behaves
with respect to addition and multiplication.
Lemma 6.6. Let α
1
,α
2
∈ A(X), β ∈ A (Y ), and x ∈
X \Y . Then:
1. (α
1
+ α
2
)[L
x
7→ β] = α
1
[L
x
7→ β] + α
2
[L
x
7→ β].
2. If β
2
= β, then furthermore (α
1
α
2
)[L
x
7→ β] =
α
1
[L
x
7→ β] · α
2
[L
x
7→ β].
The third result states that two substitution oper-
ations can be interchanged, as long as one does not
substitute a variable present in the other:
Lemma 6.7. Let α ∈ A(X), β
1
∈ A (Y
1
), β
2
∈ A (Y
2
),
x
1
,x
2
∈ X \ (Y
1
∪ Y
2
). If x
1
/∈ Y
2
and x
2
/∈ Y
1
, then
α[L
x
1
7→ β
1
][L
x
2
7→ β
2
] = α[L
x
2
7→ β
2
][L
x
1
7→ β
1
].
When this lemma applies and the order of substi-
tutions does not matter, we will write expressions like
α[L
x
1
7→ β
1
,L
x
2
7→ β
2
], or even α[∀i ≤ n : L
x
i
7→ β
i
].
Note that as an R-algebra, one may identify A(X )
with K/I, where K = R[L
x
: x ∈ X] is a free polyno-
mial algebra and I is the ideal generated by the set
{L
2
x
− L
x
| x ∈ X}. However, the substitution opera-
tion does not correspond to a ‘natural’ operation on
on K/I.
6.1 Real-Valued Boolean Functions
We will use the elements of A (X) is to represent func-
tions B
X
→ R. The following result states that this
can be done in a unique way. Since both elements of
A(X) and functions B
X
→ R can be represented by
2
|X|
real numbers, this should come as no surprise.
Theorem 6.8. Let X be a finite set, and let g: B
X
→
R be any function. Then there exists a unique hgi ∈
A(X) such that g(c) = hgi[∀x ∈ X : L
x
7→ c
x
] for all
~c ∈ B
X
.
Example 6.9. Let X = {x,y}, with ~c ∈ B
X
repre-
sented as c
x
c
y
. Consider the function g: B
X
→ R
given by
g(00) = 3, g(01) = −2,
g(10) = 7, g(11) = 4.
Suppose hgi = k
1
+ k
2
L
x
+ k
3
L
y
+ k
4
L
x
L
y
. Then, for
instance,
g(10) = hgi[L
x
7→ 1,L
y
7→ 0] = k
1
+ k
2
.
In a similar way we can express all g(~c) as sums of k
i
.
Thus, to find the k
i
, we have to solve
1 0 0 0
1 1 0 0
1 0 1 0
1 1 1 1
k
1
k
2
k
3
k
4
=
3
7
−2
4
.
Since this matrix is lower triangular with nonzero di-
agonal entries, it is invertible, so the k
i
exist and are
unique. In fact, we find hgi = 3 + 4L
x
− 5L
y
+ 2L
x
L
y
.
7 THE ALGORITHM
Using the notation of the previous two sections, we
can now state our algorithm for calculating unrelia-
bility. It is presented in Algorithm 1. The algorithm
works bottom-up, assigning to each node v a formal
Fault Tree Reliability Analysis via Squarefree Polynomials
43

input : A FT T = (V,E,γ,p)
output: U (T )
1 ToDo ← V ;
2 while ToDo 6= ∅ do
3 Pick v ∈ ToDo minimal w.r.t. ;
4 ToDo ← ToDo \ {v};
5 if γ(v) = BE then
6 g
v
← p(v);
7 else
8 if γ(v) = OR then
9 g
v
← 1 −
∏
w∈ch(v)
(1 − L
w
);
10 else
11 g
v
←
∏
w∈ch(v)
L
w
;
12 end
13 ToDo
v
← {w ∈ V | id(w) = v};
14 while ToDo
v
6= ∅ do
15 Pick w ∈ ToDo
v
maximal w.r.t. ;
16 ToDo
v
← ToDo
v
\ {w};
17 g
v
← g
v
[L
w
7→ g
w
];
18 end
19 end
20 end
21 return g
R
T
Algorithm 1: The algorithm SFPA(T ).
expression g
v
∈ A ({w ∈ V | w ≺ v}) representing
the failure probability of v; the formal variables L
w
present in g
v
represent nodes with multiple paths from
the root, which we will also encounter further in the
calculation.
The algorithm works as follows: working bottom-
up (lines 1–4), the algorithm first assigns a g
v
of the
most basic form to v (lines 5–12): for a BE this is
simply its failure probability p(v), while for OR- and
AND-gates it is the expression for the failure prob-
ability in terms of the formal variables L
w
, where w
ranges over ch(v). After obtaining this expression of
g
v
, the algorithm then substitutes away all formal vari-
ables that we will not encounter later in the compu-
tation (lines 13–18). These are precisely the L
w
for
which id(w) = v, as for these w this is the point where
we will not encounter other copies of L
w
anymore.
We replace each L
w
with the associated expression g
w
;
we start with the w closest to v, as these g
w
may con-
tain other L
w
0
that also need to be substituted away.
Finally, we return g
R
T
(line 21). At this point all for-
mal variables have been substituted away, so g
R
T
∈ R.
Note that ‘under the hood’ we have determined id(v)
for each v, which can be done in linear time by Theo-
rem 5.5.
The main theoretical result of this paper is the va-
lidity of Alg. 1.
Theorem 7.1. Let T be a FT. Then SFPA(T ) = U(T ).
We will prove this theorem in Section 9. First, we
introduce a slight extension to the FT formalism.
8 PARTIALLY CONTROLLABLE
FAULT TREES
In this section, we slightly extend the FT formalism
in a manner necessary for the proof of Theorem 7.1.
The resulting objects, partially controllable fault trees
(PCFTs), are just like regular FTs, except that certain
BEs are labelled controllable BEs; these do not have
a fixed failure probability but instead can be set to 0
or 1 at will. We emphasize that the concept of PCFTs
does not correspond to an engineering reality, but is a
mathematical construct needed for the proof of Theo-
rem 7.1.
Definition 8.1. An partially controllable fault tree
(PCFT) is a tuple T = (V,E,γ,p) where:
• (V, E) is a rooted directed acyclic graph;
• γ is a function γ : V → {OR,AND,BE,CBE} such
that γ(v) ∈ {BE,CBE} if and only if v is a leaf;
• p is a function p : BE
T
→ [0,1], where BE
T
=
{v ∈ V | γ(v) = BE}.
Similar to BE
T
we define CBE
T
= {v ∈ V | γ(v) =
CBE}. Since the failure of CBEs is not probabilistic,
one can only speak of the failure probability of T once
one has set the states of the CBEs. Therefore, U(T ) is
not a fixed probability, but a function B
CBE
T
→ [0,1].
Definition 8.2. 1. The structure function of T is a
map V × B
BE
T
× B
CBE
T
→ B defined by
S
T
(v,
~
f ,~c) =
f
v
, if γ(v) = BE,
c
v
, if γ(v) = CBE,
W
w∈ch(v)
S
T
(w,
~
f ,~c), if γ(v) = OR,
V
w∈ch(v)
S
T
(w,
~
f ,~c), if γ(v) = AND.
2. Let
~
F ∈ B
BE
T
be a random variable so that
F
v
is Bernoulli distributed with P(F
v
= 1) =
p(v) for each v ∈ BE
T
, and all F
v
are indepen-
dent. Then the unreliability of T is the function
U(T ): B
CBE
T
→ [0,1] given by
U(T )(~c) = P(S
T
(R
T
,
~
F,~c) = 1).
In light of Theorem 6.8, the function
U(T ): B
CBE
T
→ B is described by its associated
polynomial
hU (T )i ∈ A (CBE
T
).
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
44
Example 8.3. Consider the PCFT OR(a,b), where
γ(a) = BE and γ(b) = CBE (see Fig. 3) and p(a) = 0.4.
Then B
BET
∼
=
B
CBEt
∼
=
B, and S
T
(R
T
, f ,c) = 1 if and
only if at least one of f
a
,c
b
equals 1. Since P(F
a
=
1) = p(a) = 0.4, it follows that
U(T )(c) =
(
0.4, if c
b
= 0,
1, if c
b
= 1.
As a polynomial this is hU (T )i = 0.4 + 0.6L
b
.
8.1 Quasimodular Composition
Now that we have expressed a PCFT T as a polyno-
mial hU(T )i, the next step is to relate substitution op-
erations on such polynomials to graph-theoretic oper-
ations on PCFTs. The key concept on the PCFT side
is quasimodular composition, which is defined as fol-
lows.
Definition 8.4. Let T = (V,E,γ,p) and T
0
=
(V
0
,E
0
,γ
0
,p
0
) where V and V
0
are not necessarily dis-
joint, such that E,γ,p,ch coincide with E
0
,γ
0
,p
0
,ch
on V ∩ V
0
. Let v ∈ CBE
T
\V
0
, and assume that
BE
T
∩BE
T
0
= ∅ (see Fig. 4). Then the quasimodular
composition T [v 7→ T
0
] of T and T
0
in v is the PCFT
obtained by replacing v in T by the entire PCFT T
0
,
rerouting all edges originally to v to R
T
0
instead.
The concept of quasimodular composition of
PCFTs is closely related to modular composition of
FTs (Rauzy and Dutuit, 1997). The difference is that
in modular composition T and T
0
may not share any
nodes, while in quasimodular composition they may
share CBEs, as well as any internal nodes; however,
due to the condition that these internal nodes must
have the same children in T and T
0
, any shared in-
ternal nodes may not have any BE descendants.
The following result states that substitution on the
polynomial level precisely corresponds to quasimod-
ular composition on the PCFT level; it is the key in-
gredient to the proof of Theorem 7.1.
Theorem 8.5. Let T,T
0
,v be as in Definition 8.4 and
let T
00
= T [v 7→ T
0
] be their quasimodular composi-
tion. Then CBE
T
00
= CBE
T
\{v} ∪ CBE
T
0
, and as el-
ements of A(CBE
T
00
) one has
hU (T
00
)i = hU(T )i[L
v
7→ hU(T
0
)i].
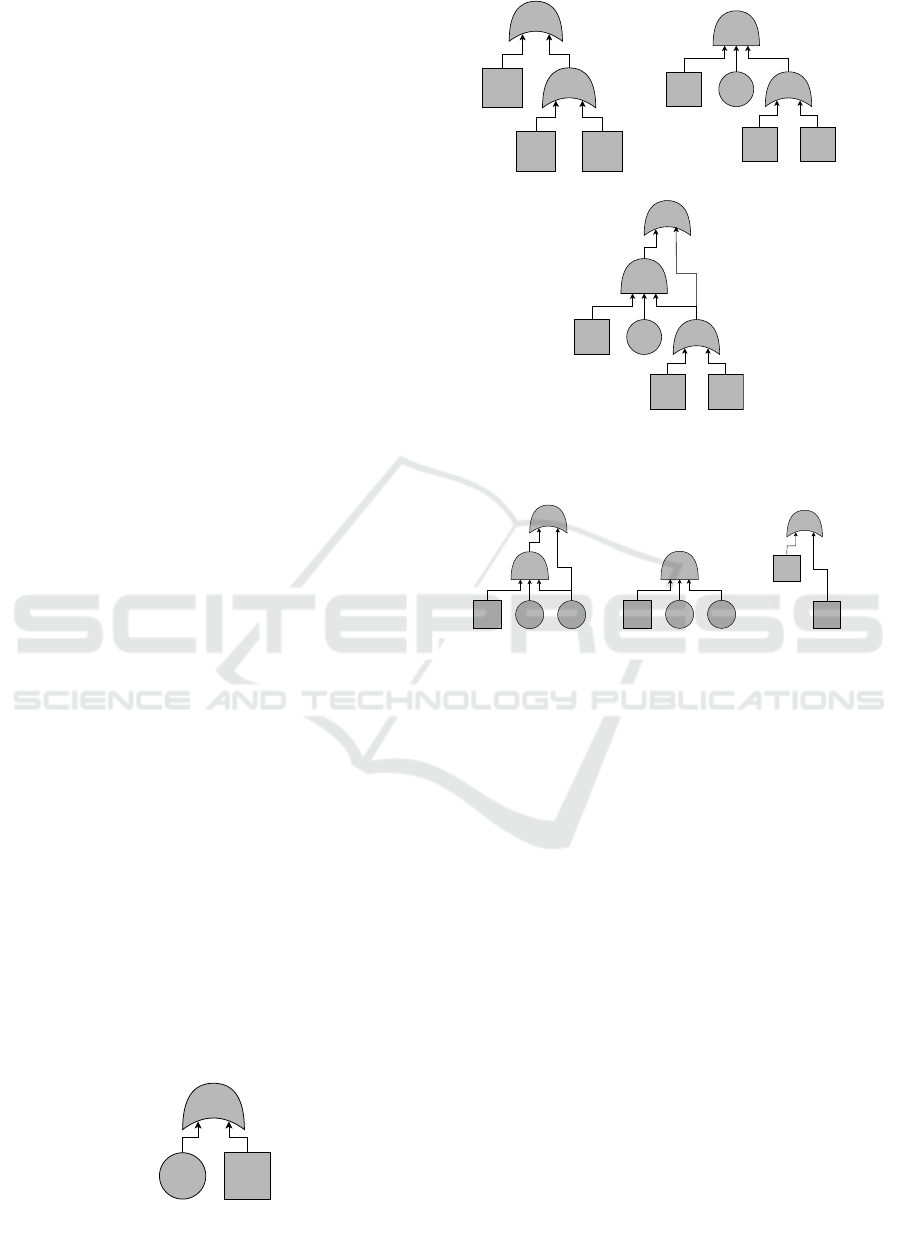
ba
0.4
Figure 3: The PCFT of Example 8.3.
c d
e
f
v
(a) T .
a b
c d
v
e
(b) T
0
.
a b
c d
v
e
f
(c) T [v 7→ T
0
].
Figure 4: An example of quasimodular composition.
Square nodes are CBEs.
ca b
d
e
(a) T .
ca b
d
(b) T
d
.
e
d
c
(c) T [{c,d}].
Figure 5: An example of the constructions of Definition 9.1.
A PCFT T is depicted in (a) (square nodes are CBEs). The
sub-FT T
d
with root d is depicted in (b). The FT T [{c,d}]
obtained by turning c,d into CBEs is depicted in (c); note
that this FT is also equal to T [{b,c,d}], T [{a,c,d}] and
T [{a,b, c,d}].
This theorem is best read ‘in reverse’: given a
large PCFT T
00
, one can calculate U(T
00
) by finding
a quasimodule T
0
and its remainder T , and combin-
ing U(T ) and U(T
0
). In this sense, this theorem is
analogous to modular decomposition of FTs (Rauzy
and Dutuit, 1997), in which a FT’s unreliability is ex-
pressed in terms of that of its modules. Again, the key
difference is that we allow not just modular decompo-
sition, but also quasimodular decomposition.
9 SKETCHED PROOF OF
CORRECTNESS
In this section, we sketch the proof of Theorem 7.1;
a full proof is presented in the appendix. Before we
outline the proof, we first define two ways to construct
new (PC)FTs from a FT.
Definition 9.1. Let T = (V,E,γ,p) be a FT.
Fault Tree Reliability Analysis via Squarefree Polynomials
45

1. Let v ∈ V . Then T
v
= (V
v
,E
v
,γ
v
,p
v
) is the FT con-
sisting of the descendants of v, with v as a root.
2. Let I ⊆ V . Then T [I] is the PCFT obtained from
T via the following procedure:
• For each v ∈ I, set γ(v) = CBE;
• For each v ∈ I, remove all outgoing edges;
• Then T [I] is the PCFT consisting of all nodes
reachable from the root.
These constructions are depicted in Figure 5.
For a node v, let g
v,∞
be the value of g
v
at the end
of the loop in lines 14–18 of Algorithm 1; this is the
value g
v
has when the algorithm ends, and which will
be used to substitute L
v
in line 17. Then Theorem 7.1
follows from the following result:
Theorem 9.2. Let v ∈ V , and define
I
v
= {w ∈ V | w ≺ v ≺ id(w)}.
Then g
v,∞
= hU(T
v
[I
v
])i.
Theorem 7.1 is just the special case v = R
T
, as
T
R
T
= T and I
R
T
= ∅. The proof can be sketched as
follows:
This is proven by induction on T . For BEs this
is immediate. If γ(v) = AND, then g
v
is initialized as
∏
w∈ch(v)
L
w
. Then, for each w picked in line 15 of
Algorithm 1, a L
w
is substituted by its correspond-
ing polynomial g
w
= g
w,∞
. By the induction hypoth-
esis, g
w,∞
corresponds to the unreliability function of
a certain PCFT, and by Theorem 8.5, this substitution
operation corresponds to the composition of PCFTs.
By keeping track of the form of the resulting PCFT,
one shows that the PCFT one ends up with is exactly
T
v
[I
v
], showing the result for v. The case γ(v) = OR is,
of course, completely analogous. By induction, this
proves Theorem 9.2, and by consequence Theorem
7.1.
10 COMPLEXITY
The complexity of Alg. 1 can be bound in terms of
graph parameters of the DAG T . To do so, we first
note that we can slightly rephrase the algorithm as fol-
lows. If w is a child of v and w has only one parent,
then w is a maximal element of ToDo
v
. As such, in
line 15 these w will be picked first. Therefore, we may
as well do this replacement in lines 9 and 11 directly.
This leads to Alg. 2, which has the same functional-
ity as Alg. 1 and therefore calculates U(T ) correctly.
Note that the condition that w has only one parent is
equivalent to id(w) = v, which leads to our definition
of S
v
in line 8.
Like the standard algorithm for reliability analysis
for treelike FTs (Ruijters and Stoelinga, 2015), Alg. 2
input : A FT T = (V,E,γ,p)
output: U (T )
1 ToDo ← V ;
2 while ToDo 6= ∅ do
3 Pick v ∈ ToDo minimal w.r.t. ;
4 ToDo ← ToDo \ {v};
5 if γ(v) = BE then
6 g
v
← p(v);
7 else
8 S
v
= {w ∈ ch(v) | id(w) = v};
9 if γ(v) = OR then
10 p
1
←
∏
w∈S
v
(1 − g
w
);
11 p
2
←
∏
w∈ch(v)\S
v
(1 − L
w
);
12 g
v
← 1 − p
1
p
2
;
13 else
14 p
1
←
∏
w∈S
v
g
w
;
15 p
2
←
∏
w∈ch(v)\S
v
L
w
;
16 g
v
← p
1
p
2
;
17 end
18 ToDo
v
← {w ∈ V \ ch(v) | id(w) = v};
19 while ToDo
v
6= ∅ do
20 Pick w ∈ ToDo
v
maximal w.r.t. ;
21 ToDo
v
← ToDo
v
\ {w};
22 g
v
← g
v
[L
w
7→ g
w
];
23 end
24 end
25 end
26 return g
R
T
Algorithm 2: The algorithm SFPA2(T ).
works bottom-up. However, it is more complicated
due to the fact that our main objects of interest are
squarefree polynomials rather than real numbers, and
operating on these induces a larger complexity. To
describe this complexity, we introduce the following
notation:
X = {v ∈ V | v has multiple parents}.
Since in Alg. 2 line 8, the set S
v
consists of all chil-
dren of v with a single parent, the only L
x
that are
introduced satisfy x ∈ X. Thus each g
v
is an element
of A(X ), and as such has at most 2
|X|
terms. Multi-
plying two such polynomials has complexity O(4
|X|
),
and since substitution is just multiplication by Lemma
6.5, substitution has the same complexity. Next, we
count the number of multiplications and substitutions.
The FT T has |X| nodes with more than 1 parent and
1 node with 0 parents, so in total |V | − |X| − 1 nodes
have exactly one parent and are used in multiplica-
tions in lines 10 and 14 of Alg. 2; in particular, there
are at most |V | multiplications. Furthermore, for each
v one has |ToDo
v
| ≤ |X|, hence at each v there are at
most |X| substitutions in line 22. We conclude:
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
46
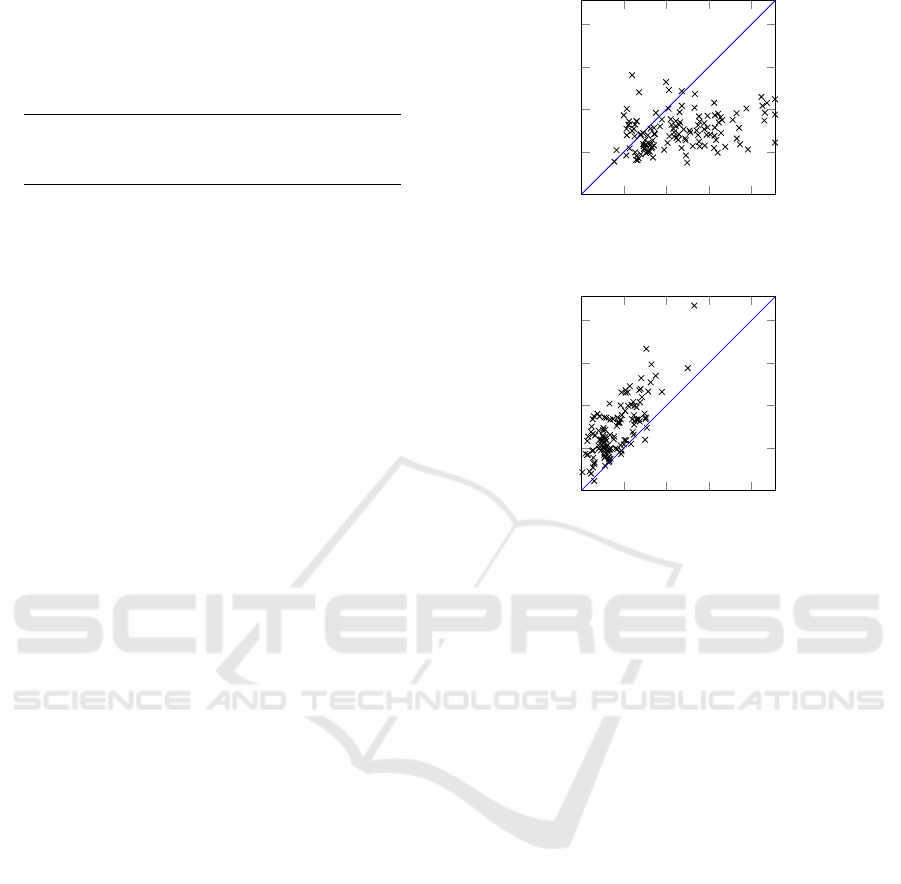
Table 1: Summary of the results: the minimum, median and
maximum of the computation times (in seconds) of the two
algorithms are displayed.
∗
Timeout at 60 seconds, attained
3 times.
SFPA Storm
Benchmark 1
minimum 0.60 0.89
median 3.51 1.81
maximum 60
∗
7.91
Benchmark 2
minimum 0.30 0.41
median 0.68 1.42
maximum 6.73 47.29
Theorem 10.1. Let X be as above. Then Alg. 2 has
time complexity O(|V |(|X | + 1)4
|X|
).
If X = ∅, then T is treelike. In this case, Theorem
10.1 tells us that Alg. 2 has time complexity O(|V |).
Indeed, in this case S
v
= ch(v) for all v, and each g
v
is
a real number. Hence Alg. 2 reduces to the standard
bottom-up algorithm for treelike FTs, which is known
to have linear time complexity. In fact, Theorem 10.1
generalizes this result: it shows that for bounded |X|,
time complexity of Alg. 2 is linear. This makes Alg. 2
a useful tool if the non-tree topology of an FT is con-
centrated in only a few nodes.
The complexity bound of Theorem 10.1 can be
sharpened by realizing that a variable L
w
only occurs
in the computation of g
v
if w ≺ v id(w). Using this
as a bound we get the following result:
Theorem 10.2. Define
c = max
v∈V
|{w ∈ X | w ≺ v id(w)}|.
Then Alg. 2 has time complexity O(|V |(c + 1)4
c
).
As far as I am aware, a comparable analysis that
bounds the time complexity of BDD-based methods
in terms of multiparent nodes does not exist in the
literature. Such an analysis can be complicated by
variable ordering heuristics for the BDD construction,
and is beyond the scope of this paper. Thus the exis-
tence of a provable complexity bound in terms of the
number of multiparent nodes is a major advantage of
the SFPA method.
11 EXPERIMENTS
We perform experiments to test SFPA’s performance,
as implemented in Python. All experiments are per-
formed on a Ubuntu virtual machine with 6 cores and
8GB ram, running on a PC with an Intel Core i7-
10750HQ 2.8GHz processor and 16GB memory. We
compare the performance to that of Storm-dft, a state-
of-the-art model checker that calculates FT unrelia-
bility via a BDD-based approach with modularization
10
0
10
1
10
0
10
1
SFPA
Storm
(a) Unreliability on benchmark set 1.
10
0
10
1
10
0
10
1
SFPA
Storm
(b) Unreliability on benchmark set 2.
Figure 6: Timing comparison of SFPA and Storm for calcu-
lating unreliability. Times are in seconds, timeout at 60s.
(Basg
¨
oze et al., 2022b). We compare performance on
two benchmark sets of FTs:
1. A collection of 128 randomly generated FTs used
as a benchmark set in (Basg
¨
oze et al., 2022a).
These FTs have, on average, 89.3 nodes, of which
10.3 have multiple parents.
2. A new randomly generated collection of 128 FTs,
created using SCRAM (Rakhimov, 2019). These
FTs have, on average, 123.8 nodes, 4.1 of which
have multiple parents.
The second benchmark set was created in order to
validate the theoretical results of Section 10, where it
was shown that the complexity of SFPA depends on
the number of nodes with multiple parents. We com-
pute both the unreliability of each FT and measure
the time of both computations (timeout: 60 seconds).
The results are given in Table 1 and Figure 6. As one
can see, Storm largely outperforms SFPA on bench-
mark set 1, with lower computation times on 76% of
the unreliability calculations. On benchmark set 2,
SFPA fares considerably better, outperforming Storm
on 95% of all FTs for unreliability calculation: on av-
erage SFPA takes only 54% of the computation time
of Storm. The fact that SFPA is more efficient on this
benchmark set can be understood from Theorem 10.1,
which shows that computational complexity of SFPA
Fault Tree Reliability Analysis via Squarefree Polynomials
47

is low when the number of multiparent nodes is low.
By contrast, for a BDD-based approach the presence
of any multiparent nodes means one cannot use the
bottom-up algorithm and has to rely on creating the
BDD, which is usually slower than the bottom-up ap-
proach. Furthermore, modularization may only be of
limited use depending on the position of the multipar-
ent nodes.
Overall, we can conclude that for calculating un-
reliability SFPA is competitive with the state-of-the-
art, and is significantly faster on an FT benchmark set
with fewer multiparent nodes.
12 CONCLUSION
In this paper, we have introduced SFPA, a novel algo-
rithm for calculating fault tree unreliability based on
squarefree polynomial algebras. We have proven its
validity and given complexity bounds in terms of the
number of multiparent nodes. Experiments show that
it is significantly faster than the state of the art on FTs
with few multiparent nodes.
There are several directions for future work. First,
our proof-of-concept Python implementation of SFPA
can undoubtedly be improved, leading to faster com-
putation. Such improvements can be done on the the-
oretical side as well. For example, one could intro-
duce a new formal variable U
v
for 1 − L
v
; this would
decrease the number of terms in the expression of g
v
when v is an OR-gate from 2
|ch(v)|
− 1 to 2, hopefully
leading to faster computation. In this case, new com-
putation rules such as L
v
U
v
= 1 need to be introduced.
Second, our experimental results show that a
BDD-based method works best for FTs with more
multiparent nodes, while SFPA works best for FTs
with fewer multiparent nodes. It would be interesting
to see a more extensive experimental evaluation that
investigates what the break-even point is. Such an ex-
perimental evaluation can be augmented by incorpo-
rating real-world case studies, to test the effectiveness
of SFPA in practice.
On the other hand, it would be interesting to see
to what extent SFPA-like methods can be applied to
other problems in FT analysis, such as the analysis
of dynamic FTs, which also consider time-dependent
gates and behaviour. A good candidate is the analy-
sis of attack trees (ATs), the security counterpart of
FTs. Quantitative analysis of (non-dynamic) ATs is
also done using BDDs (Lopuha
¨
a-Zwakenberg et al.,
2022), which has the same issues as BDD-based FT
analysis. We expect that SFPA-like methods can be
extended to ATs as well.
ACKNOWLEDGEMENTS
This research has been partially funded by ERC Con-
solidator grant 864075 CAESAR and the European
Union’s Horizon 2020 research and innovation pro-
gramme under the Marie Skłodowska-Curie grant
agreement No. 101008233.
REFERENCES
Basg
¨
oze, D., Volk, M., Katoen, J.-P., Khan, S., and
Stoelinga, M. (2022a). Artifact for ”BDDs Strike
Back - Efficient Analysis of Static and Dynamic Fault
Trees”.
Basg
¨
oze, D., Volk, M., Katoen, J.-P., Khan, S., and
Stoelinga, M. (2022b). Bdds strike back: effi-
cient analysis of static and dynamic fault trees. In
NASA Formal Methods Symposium, pages 713–732.
Springer.
Bobbio, A., Egidi, L., and Terruggia, R. (2013). A method-
ology for qualitative/quantitative analysis of weighted
attack trees. IFAC Proceedings Volumes, 46(22):133–
138.
Bouissou, M., Bruyere, F., and Rauzy, A. (1997). Bdd based
fault-tree processing: a comparison of variable order-
ing heuristics. In Proceedings of European Safety and
Reliability Association Conference, ESREL’97.
IsoTree (2023). FaultTree+. available online at https:
//www.isograph.com/software/reliability-workbench/
fault-tree-analysis-software/.
L
ˆ
e, M., Weidendorfer, J., and Walter, M. (2014). A novel
variable ordering heuristic for bdd-based k-terminal
reliability. In 2014 44th Annual IEEE/IFIP Interna-
tional Conference on Dependable Systems and Net-
works, pages 527–537. IEEE.
Lengauer, T. and Tarjan, R. E. (1979). A fast algorithm for
finding dominators in a flowgraph. ACM Transactions
on Programming Languages and Systems (TOPLAS),
1(1):121–141.
Lopuha
¨
a-Zwakenberg, M., Budde, C. E., and Stoelinga, M.
(2022). Efficient and generic algorithms for quanti-
tative attack tree analysis. IEEE Transactions on De-
pendable and Secure Computing.
Lopuha
¨
a-Zwakenberg, M. (2023a). Fault tree reliability
analysis via squarefree polynomials.
Lopuha
¨
a-Zwakenberg, M. (2023b). Fault tree reliabil-
ity analysis via squarefree polynomials (full version).
available online at https://arxiv.org/abs/2312.05836.
Pandey, M. (2005). Fault tree analysis. Lecture notes, Uni-
versity of Waterloo, Waterloo.
Prosser, R. T. (1959). Applications of boolean matrices to
the analysis of flow diagrams. In Papers presented
at the December 1-3, 1959, eastern joint IRE-AIEE-
ACM computer conference, pages 133–138.
Rakhimov, O. (2019). Scram. available online at https:
//github.com/rakhimov/scram.
MODELSWARD 2024 - 12th International Conference on Model-Based Software and Systems Engineering
48

Rauzy, A. (1993). New algorithms for fault trees analysis.
Reliability Engineering & System Safety, 40(3):203–
211.
Rauzy, A. and Dutuit, Y. (1997). Exact and truncated com-
putations of prime implicants of coherent and non-
coherent fault trees within aralia. Reliability Engi-
neering & System Safety, 58(2):127–144.
Reliotech (2023). TopEvent FTA. available on-
line at https://www.fault-tree-analysis.com/
free-fault-tree-analysis-software.
Ruijters, E., Budde, C. E., Nakhaee, M. C., Stoelinga, M. I.,
Bucur, D., Hiemstra, D., and Schivo, S. (2019). Ffort:
a benchmark suite for fault tree analysis.
Ruijters, E. and Stoelinga, M. (2015). Fault tree analysis:
A survey of the state-of-the-art in modeling, analysis
and tools. Computer science review, 15:29–62.
Valiant, L. G. (1979). The complexity of enumeration and
reliability problems. siam Journal on Computing,
8(3):410–421.
Watson, H. A. (1961). Launch control safety study. Bell
labs.
Fault Tree Reliability Analysis via Squarefree Polynomials
49
