
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
Annalena Ulschmid
1 a
, Bernhard Kerbl
1 b
, Katharina Kr
¨
osl
1,2 c
and Michael Wimmer
1 d
1
TU Wien, Austria
2
VRVis Forschungs-GmbH, Austria
Keywords:
Path Tracing, Scene Editing, Adaptive Rendering, Empirical Studies.
Abstract:
With recent developments in GPU ray tracing performance and (AI-accelerated) noise reduction techniques,
Monte Carlo Path Tracing at real-time rates becomes a viable solution for interactive 3D scene editing, with
growing support in popular software. However, even for minor edits (e.g., adjusting materials or moving
small objects), current solutions usually discard previous samples and the image formation process is started
from scratch. In this paper, we present two adaptive, priority-based re-rendering techniques with incremen-
tal updates, prioritizing the reconstruction of regions with high importance, before gradually moving to less
important regions. The suggested methods automatically identify and schedule sampling and accumulation of
immediately affected regions. An extensive user study analyzes whether such prioritized renderings are bene-
ficial to interactive scene editing, comparing them with same-time conventional re-rendering. Our evaluation
shows that even with simple priority policies, there is a significant preference for such incremental rendering
techniques for interactive editing of small objects over full-screen re-rendering with denoising.
1 INTRODUCTION
Monte Carlo (MC) path tracing (Kajiya, 1986; Pharr
et al., 2016) is a frequently used physically based ren-
dering technique, as it naturally includes many effects
such as global illumination, reflections, soft shadows,
and caustics. Offline path tracing has become a sta-
ple of the movie industry and production rendering in
general. For each pixel of a rendered image, a path
is traced into the scene, and over time, multiple of
these path samples are accumulated. Each additional
sample helps to reduce MC noise, and sampling qual-
ity is often referred to via the number of samples per
pixel (spp). Due to its stochastic nature, path tracing
is unbiased, but a large number of samples is required
for a noise-free image. Thus, even in the best-case
scenario, renderings require several seconds before an
acceptable level of quality is reached. Due to the high
cost of path tracing, rendering use cases that require a
short feedback loop (e.g., previews during interactive
scene editing) rely on real-time approximation meth-
ods (often based on rasterization). These solutions
closely, but not entirely, mimic the results obtained
a
https://orcid.org/0000-0002-0539-9378
b
https://orcid.org/0000-0002-5168-8648
c
https://orcid.org/0000-0002-9939-0517
d
https://orcid.org/0000-0002-9370-2663
by an eventual path-traced render. However, to pro-
vide more accurate previews, it is desirable to use path
tracing interactively, also during scene editing. Such
a solution would provide a more seamless experience
and productive workflow for digital artists, as current
approximating methods cannot fully capture complex
light transport effects.
Schmidt et al. (Schmidt et al., 2014) identify in-
teractive feedback as an open problem in artistic edit-
ing. Much has happened since then: Modern graph-
ics hardware supports ray-tracing pipelines next to
traditional rasterization. However, in real-time set-
tings (30–60 FPS), current GPU hardware imposes
a soft limit of ∼1 spp per frame. Several powerful
noise-reduction techniques have been introduced, al-
lowing not only shorter rendering times for offline
rendering, but also path tracing in interactive settings.
However, current solutions generally discard all pre-
viously accumulated samples as soon as any part of
the scene changes (camera movement, object modifi-
cations, material edits). Although this is rightly jus-
tified by physical correctness (as every change can
affect indirect light transport), it results in low im-
age quality during editing and disruptive artifacts, e.g.
flickering or blurriness.
Global image updates are reasonable when the
scene changes overall, but can be unnecessarily dis-
46
Ulschmid, A., Kerbl, B., Krösl, K. and Wimmer, M.
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering.
DOI: 10.5220/0012324600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 46-57
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
Incremental Updates
Continuous Refinement
Global Updates
Any
Edit
Camera
Edit
Scene
Edit
Compute Tile Order
based on Importance Metric
Duplicate
Current Tiles in Budget
Reduction Compute Shader
Aggregate
All Tiles
Processed
Replace Updated Tiles
preserving previous values elsewhere
Follow-Up Edit
Tiles left in Queue
Conventional
Incremental (ours)
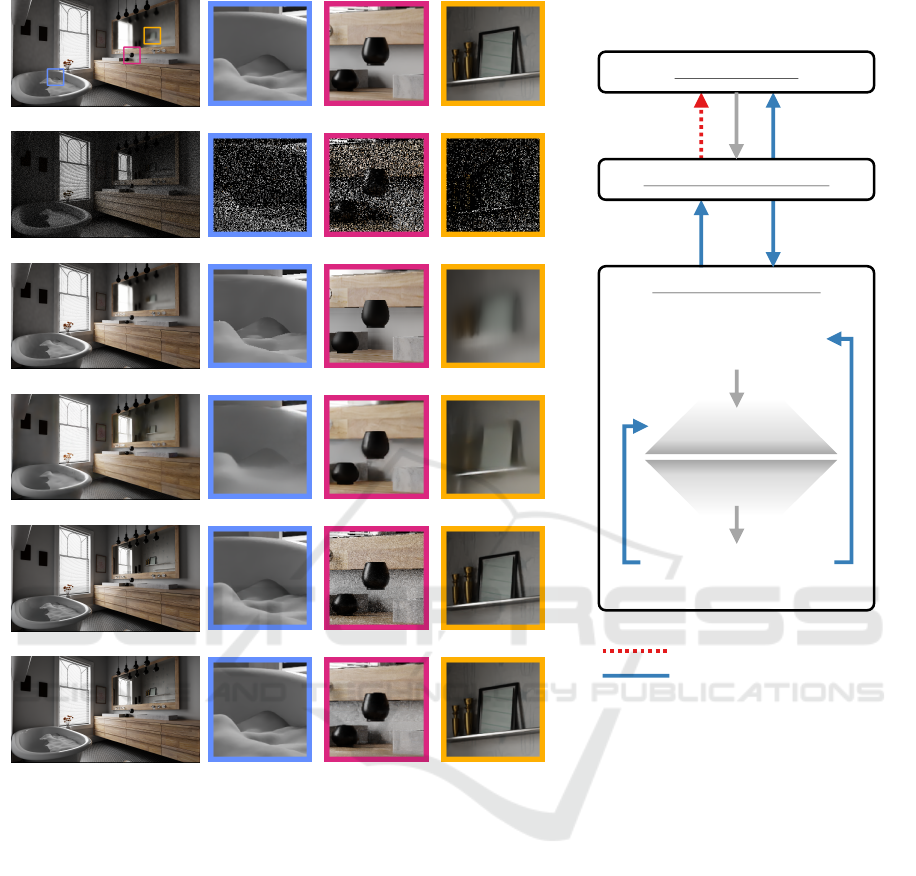
(a) Reference
(b) Noisy Re-rendering
(c) (Schied et al., 2017)
(d) (Chaitanya et al., 2017)
(e) Incremental Noisy (ours)
(f) Incremental Denoised (ours) (g) Process Overview
Figure 1: (a) – (f): Comparison of different rendering methods with 1 spp sample budget to the ground truth (a) of an in-
teractively edited scene, after slightly raising the cup. In (b) previously accumulated samples were discarded during the
computation of the new visualization and the image is updated globally, resulting in disruptive quality degradation every-
where. (c) and (d) employ denoising to reconstruct high-fidelity images from (b). (e) and (f) use a tile-based approach with
incremental updates, concentrating available samples on a subset of screen-space tiles and processing them in order of impor-
tance, measured by the Chebyshev distance from the edit on screen. The latter two avoid both noise and overblurring in the
entire scene. (g): Diagram of our suggested re-rendering process containing incremental updates.
ruptive for minor modifications that influence only a
localized region: The artist must retain their vision
of a desired visual change while having to observe
an instantaneous regression from converged images to
grainy or blurry visuals during the first few moments
of image formation. Manually specifying a static re-
gion of interest for a high-quality preview, as some
production renderers allow, cannot react to dynamic
scene changes with large object movements.
In this paper, we propose to automatically iden-
tify areas of high importance and, following an edit,
re-render these first at higher quality. An importance
policy is used to identify image areas where changes
have a lower impact and schedules gradual updates
in an incremental fashion. By rendering in the order
of importance, we eventually update the entire image
to achieve physical correctness but allow an artist
to first focus on their modification. To determine
importance, we use the Chebyshev distance of pixels
from the modified object’s position on screen. We
implement two flavors of this approach: One noisy
variant, where each MC-integrated image region is
presented immediately, and a denoised variant with
an additional denoising step. Importantly, we aim to
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
47

verify the usability of such incremental re-rendering
approaches in an interactive editing setting. Based
on our suggested methods, a detailed user study is
conducted to evaluate benefits of both the noisy and
denoised methods for real-time scene editing. The
incremental path tracing solutions are compared to a
state-of-the-art denoiser that discards all previously
accumulated samples upon edits (conventional
re-rendering). Through this user study, we aim to
answer the following research questions:
• RQ1. Which re-rendering method do artists pre-
fer (w.r.t. perceived workload and focusability)?
Are preferences dependent on specific editing sce-
narios (small objects, large objects, lights)?
• RQ2. Which kind of updates (incremental or
global) do artists prefer overall?
• RQ3. What is their general attitude towards path
tracing for scene editing?
By answering these questions, we hope to quan-
tify the benefits of our proposed methods and further
gain a better understanding of the artists’ needs. De-
veloping techniques adapted to their workflow could
enable them to use the same rendering method during
scene editing as for the final product and enhance their
overall productivity. Our main contributions thus are:
• The design of a tile-based, incremental real-time
path tracing pipeline. Scheduled tiles are re-
peated multiple times in the buffer input of a
Path Tracer. This enables replacing conventional,
global re-rendering with same-time, adaptive re-
rendering, requiring only minimal changes to un-
derlying rendering backends.
• Two implementations of automatic, prioritized re-
rendering policies for editing: one displaying the
raw values, which may still be noisy, and one with
an additional denoising step.
• A detailed user study that investigates the pre-
ferred rendering method (conventional or incre-
mental updates) of experienced artists in different
scenarios (scene modifications with uniform and
non-uniform impact), as well as offering new in-
sights into the artists’ workflow and requirements.
2 RELATED WORK
The foundations of MC path tracing are provided by
Kajiya (Kajiya, 1986). A thorough description of im-
plementing an offline path tracing framework is given
by Pharr et al. (Pharr et al., 2016). The recently in-
troduced Turing architecture (Nvidia, 2018) enables
hardware-accelerated accelerated ray-tracing and fa-
cilitates real-time path tracing at a low sample count.
2.1 Adaptive Sampling
Zwicker et al. (Zwicker et al., 2015) categorize adap-
tive rendering strategies into a-priori and a-posteriori
methods. A-priori approaches incorporate local 3D
geometry for example to compute gradients or ana-
lyze the light transport equations or analytical BRDF
models to decide where to invest in a higher amount
of samples. A-posteriori base this decision on statis-
tics such as the variance of samples thus far accu-
mulated or the mean squared error (MSE). Seminal
work on adaptive sampling to achieve high quality
with reduced sample count was provided by Mitchell
(Mitchell, 1987). Select examples of later methods
focused on path tracing are presented by Overbeck
et al. (Overbeck et al., 2009) (measuring the error
based on 2D wavelet approximations) or Hachisuka et
al. (Hachisuka et al., 2008) (computing an error based
on samples stored in multidimensional path space).
However, these works and later follow-up techniques
target offline rendering and do not consider interac-
tive aspects. In particular, to the best of our knowl-
edge, none of these adaptive approaches is designed
in the context of scene editing. In contrast, we exploit
the priors of the editing process (information where
changes occurred) to steer the sample distribution.
Strategies for improving importance sampling as
pursued by techniques like ReSTIR (Wyman and Pan-
teleev, 2021) constitute a research direction comple-
mentary to ours, as both approaches could be com-
bined. The aforementioned paper of Wyman and Pan-
teleev (Wyman and Panteleev, 2021) adapts ReSTIR
for production purposes and amongst other things
combines it with the ReLAX denoising approach.
2.2 Denoising Techniques
Much research has been conducted on improving
the computational time of physically-based light-
transport simulations to archive real-time frame rates.
The main approach is to enhance noisy, but fast
low-sample renderings by applying image reconstruc-
tion techniques as a post-processing step. Schied
et al. (Schied et al., 2017) introduced spatiotempo-
ral variance-guided filtering (SVGF), which strives to
output a temporally coherent image sequence by ac-
cumulating multiple samples. They later refine this
technique to reduce lag and ghosting artifacts by in-
corporating sparsely sampled gradients in the deci-
sion of whether to include a previous sample in a pix-
els history buffer (Schied et al., 2018).
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
48

Nvidia provides a library consisting of three
real-time denoisers: ReLAX, ReBLUR, and Sigma
(NVIDIA, 2021). Building up on SVGF, ReLAX,
inspired by temporal anti-aliasing techniques, clamps
to the fast history to improve the treatment of disoc-
cluded areas and deal with ghosting artifacts at the ex-
pense of a noisier history buffer. It can be combined
with the often more performant ReBLUR (Zhdan,
2021), which is used in computer games such as Cyp-
berpunk 2077 for enhanced visuals via ray-tracing.
Both can separately denoise diffuse and specular sig-
nals and handle checkerboarded half-resolution input.
Recently, deep learning-based denoisers have
been introduced such as Intel’s Open Image Denoise
(OIDN) (Intel, 2019) used for example by Unreal En-
gine or Nvidia’s OptiX denoiser based on the research
of Chaitanya et al. (Chaitanya et al., 2017). The lat-
ter adopts a recurrent autoencoder additionally using
auxiliary buffers to include for example depth infor-
mation and normals. Kuznetsov et al. propose a joint
adaptive and reconstruction approach for low sam-
pling rates based on convolutional neural networks
(Kuznetsov et al., 2018). Neural methods, however,
while still achieving close to real-time frame rates on
recent hardware, currently involve a slightly higher
computational cost. They are thus mainly used in
offline or interactive rendering, but not in computer
games. Thomas et al. recently proposed a combined
neural denoising and supersampling approach with
comparable runtimes to SVGF, but higher quality re-
sults (Thomas et al., 2022). Similarly, (Hasselgren
et al., 2020) combine neural denoising with learned
spatiotemporal sampling strategies.
In a dynamic context, all of the methods de-
scribed above discard all previous samples to compute
the current frame whenever something in the scene
changes and only reuse them via temporal reprojec-
tion during the denoising step. Instead of these global
updates, we propose an adaptive rendering approach
with incremental updates tailored to artists using path
tracing during scene editing.
2.3 Scene Editing and Perception
(Murakami and Hirota, 1992) introduce an incremen-
tal ray-tracing scheme, which tracks changes via a
spatial voxel partition and hash indices. For consis-
tent scene editing, (G
¨
unther and Grosch, 2015) pro-
pose using progressively computed difference images
to identify regions where scene modifications have
a high impact. Their method is based on stochas-
tic progressive photon mapping, as they focus on
slowly converging effects such as caustics, which are
more negatively affected by a global reset. (Rous-
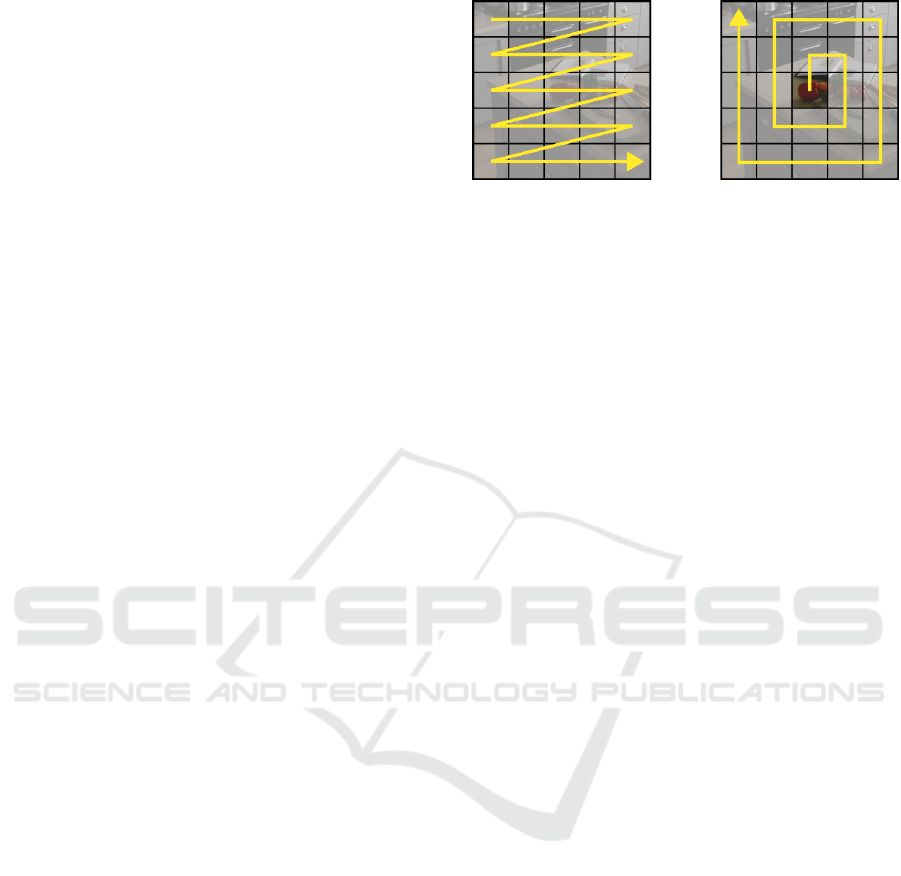
Figure 2: Tile layout representing traced paths of 1 spp ren-
derings. On the left: Standard approach of sampling the
entire image once (green). On the right: Our approach of re-
peatedly sampling only a few selected tiles (in the depicted
case two in red and blue) during the incremental updates.
The number of repetitions determines sample count within
a tile, which we refer to as the tile quality. Note that the
actual tiles are much smaller than depicted.
selle et al., 2016) reformulate the previous approach
into a control-variate integration scheme and explore
estimator combinations based on covariance in of-
fline editing scenarios with static scenes and gradient-
domain rendering. While they provide a thorough
qualitative analysis of their method, they do not eval-
uate user benefits of such adaptive solutions, e.g., in
the context of interactive editing scenarios. Addition-
ally, the above approaches use uniformly distributed
and not prioritized, adaptive screen-space samples.
In contrast, we outline and thoroughly evaluate re-
rendering methods that automatically identify and pri-
oritize regions of interest. Furthermore, our solutions
are explicitly designed to allow integration into real-
time pipelines for immediate visual feedback.
(Myrodia, 2021) conducted multiple studies to ex-
amine the perception of different noise levels in im-
ages rendered with MC path tracing, discovering that
participants primarily used their most central vision
as well as non-textured and brightest areas of images
to detect noise. Foveated rendering for path tracing
in Virtual Reality (VR) uses eye-tracking to discover
regions of higher interest to the viewer, which then a
higher sample count can be devoted to. The basic con-
cept is similar to our idea and could additionally be
integrated when editing a scene in VR in case artists
focus on a region we identified as having a lower im-
pact. Similarly to foveated rendering with path trac-
ing, we also exploit the fact that unbiased MC render-
ing allows to straightforwardly average partial results
enabling local image areas with higher quality.
3 PRIORITIZED RE-RENDERING
We propose two variants for the priority-based re-
rendering techniques with incremental updates. To
allow integration in real-time pipelines, our solutions
are designed as modules in Nvidia’s Falcor frame-
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
49
work for rapid prototyping of real-time techniques
(Kallweit et al., 2022) (version 5.1.). The code can
be found online (Ulschmid et al., 2023). Falcor
employs the concept of render graphs consisting of
render passes. Our methods adopt the Megakernel
Path Tracer and accumulation pass to change between
three modes of operation: global updates, continuous
refinement, and incremental updates. A global up-
date discards all previously accumulated samples and
renders the new frame with 1 spp uniformly. Dur-
ing continuous refinement, per-pixel samples in each
tile are accumulated by a moving average. Conven-
tional re-rendering operates exclusively using these
two modes, switching to the first whenever the scene
is changed or the camera moves. By adding a third
mode, we treat scene modifications separately by al-
lowing to update the image in an incremental fash-
ion. During the global updates and continuous re-
finement step, both variants employ Nvidia’s OptiX
(Chaitanya et al., 2017) as a noise-reducing measure.
Our methods have the same runtime complexity as
conventional re-rendering (aside from a small delta
for tile merging and denoising in ours, see below) and
achieve real-time performance (30 frames per second
at 1080p resolution) on state-of-the-art hardware.
3.1 Noisy Incremental Updates
To support incremental updates, we changed the
Megakernel Path Tracer to operate on tiles represent-
ing disjoint parts of the scene in image space instead
of the entire viewport. By repeating a selection of tiles
multiple times in the input buffer of the (unbiased)
path tracer, we can sample this region at a higher qual-
ity without having to adapt the underlying implemen-
tation, including random number generation. Our ap-
proach is designed to operate on a tile budget, thus we
can redirect the original GPU workload (and overall
complexity) of full-screen updates to just a few tiles.
After the path tracing procedure, we use a com-
pute shader to aggregate the content of the dupli-
cated tiles with a tree-based averaging reduction. This
is possible since we target unbiased MC rendering,
which allows for straightforward averaging of partial
results to create higher-quality areas. Our approach
thus yields a few high-quality tiles in roughly the
same time it would take to render a whole scene of
the same size at a low sample rate (not accounting for
variations in scene complexity over the screen). The
buffer layout we use is illustrated by Figure 2. Choos-
ing a higher target tile quality results in fewer tiles be-
ing processed per update and thus a smaller region of
the image that can be re-rendered with a given budget.
The tile size directly influences the visuals and extent
Figure 3: Left: tiles update simultaneously in resting scene.
Right: a spiral determines the order of tile updates after edit.
Note that the actual tiles are much smaller than depicted.
of each incremental update. As default values, we set
the tile quality to 64 spp and the tile size to 16 pixels.
Falcor’s path tracing pipeline includes a sample
accumulation stage, which aggregates color values
over time as long as scenes remain unchanged and re-
sets them to black otherwise. Consider the case of
a small, localized scene edit. In our incremental ap-
proaches, only the previously processed tiles are re-
placed. The values in the other tiles are kept. This
way, the regions of the image we identified as most
affected by a modification get updated in high quality
as soon as possible, while less influenced regions are
re-rendered at a later time. Unless the scene is further
modified, we switch to the default, full-screen accu-
mulation mode after the entire screen has been pro-
cessed once with incremental updates. In the case of
further modifications, we restart the incremental pro-
cedure at the changed object’s screen position. Dur-
ing the global updates and continuous accumulation
of samples, the tiles are processed from top to bottom
and left to right. If the scene is modified and an incre-
mental update is triggered, the order of tiles is com-
puted by constructing a spiral starting at the object’s
position projected to image space (see Figure 3).
Our applied importance metric thus defines the
priority P of a tile t with center (x
t
, y
t
) in image space
using the Chebyshev distance from the selected object
o with center (x
o
, y
o
) as follows:
P(t) = max(|x
o
− x
t
|, |y
o
− y
t
|) (1)
3.2 Denoised Incremental Updates
In addition to the above method, we designed a ”de-
noised” version. In addition to denoising during con-
tinuous refinement, it also applies the OptiX denoiser
during incremental updates, resizing its domain to the
space of already re-rendered tiles. However, as re-
sizing and running a denoiser designed for full-image
denoising can be costly, we introduce a configurable
threshold parameter. A value of zero means the de-
noiser is resized and run each frame. Values above
zero indicate the number of pixels the updated region
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
50

has to grow on either side before the denoiser is re-
sized and executed. In order to not mix noisy and
denoised tiles, we separately store two images: One
containing all noisy updated tiles and another contain-
ing only the region that has so far been updated and
denoised. The first one is the same as for the noisy in-
cremental method. If the threshold value is reached,
the denoiser is resized to and executed upon the en-
tire region that has been updated so far. For temporal
stability, the smaller, previous denoised region is then
placed on top of the frame again.
Higher threshold values can lead to slightly more
noticeable edges between the old and newly updated
regions and less reactive, block-like visuals. Overall,
however, it increases the performance of the method
such that it only deviates from the noisy incremen-
tal approach by a minor delta that does not affect
perceived responsiveness during editing. We used a
threshold value of 200 as a default.
3.3 Interaction and User Control
To enable the user to modify the scene, we added an
additional interaction pass to Falcor. It allows select-
ing one or multiple objects and exposes their trans-
form and material properties via the Dear ImGUI user
interface (UI). These entries can be manipulated via
clicking and dragging or directly entering a value.
Changes in the parameters are internally applied to
the objects as an animation. The UI stage we added
to the Falcor path tracing pipeline also communicates
information to the rendering stages, such as selected
object center and whether an interaction occurred.
Artifacts can occur when a user interrupts the in-
cremental update procedure by continuously chang-
ing the object position with very high tile quality set-
tings. If the resulting tile size is smaller than the ob-
ject, moving it can result in ghosting artifacts, as parts
of the object in its old position persist. In this case, the
tile quality can be reduced or the tile size increased
to process more tiles in one incremental update. Au-
tomating this parameter tuning is left as future work.
4 EVALUATION
Especially for smaller edits, reusing tiles from pre-
vious, converged images for re-rendering can sig-
nificantly increase quality as measured by metrics,
e.g., PSNR and PSNR-HVS-M, (Ponomarenko et al.,
2007; Ponomarenko et al., 2011). Figure 4 illustrates
this for the edit in Figure 1, also displayed by the
video in the suplementary material. However, our
main focus in this work lies on verifying whether
10
20
30
40
0 25 50 75 100
Frame
PSNR
10
20
30
40
0 25 50 75 100
Frame
PSNR−HVS−M
Noisy
Incremental
Denoised
Incremental
Optix
Denoiser
SVGF
Comparison during Scene Editing
Figure 4: Comparison of different global and incremental
methods during the edit in Figure 1 all starting at 1024 spp.
The dotted line represents 1 spp baseline without denoising.
As our method replaces converged tiles before the edit with
new ones, image accuracy degrades gracefully while mov-
ing the cup.
such policies also result in an improved usability and
interactive editing experience. Thus, we conducted
an extensive user study to compare conventional and
priority-based re-rendering.
4.1 User Study Overview
Referring to our three research questions stated in sec-
tion 1, we investigate which rendering method artists
prefer and if their preference depends on a specific
editing scenario (RQ1). The following three scenar-
ios are considered:
1. Small edits (modify localized geometry)
2. Large edits (modify large scene objects)
3. Modify a scene’s light sources
To evaluate the artists’ preferences, we instructed
them to execute multiple tasks with global and in-
cremental re-rendering methods under the scenarios
listed above (see Table 1). Afterward, we let the par-
ticipants rate the experienced combination of method
and scenario to extract a participant-wise score. We
start from the initial premise that edits on small ob-
jects primarily affect a local region of the scene and
it might thus be obstructive for a fluid workflow to
re-render the entire image. On the other hand, light
source edits mostly have a global influence and are
more likely to require a full image update to convey a
complete impression of their effect. Thus, one goal of
this study is to evaluate the following two hypotheses:
Artists prefer (w.r.t. perceived workload and focus-
ability, measured as a participant-wise score)
1. an incremental rendering method to state-of-the-
art solutions (i.e., denoised full-screen updates)
when editing small objects.
2. a global update approach when manipulating light
sources.
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
51

We test these hypotheses via ANOVA and pair-
wise t-tests. By performing an a-priori power analysis
using G*Power (Faul et al., 2007), we calculated the
number of participants needed for a power of 1 − β =
0.8 with a medium effect of η
2
p
= 0.06 as 15 for an
ANOVA (repeated measures, within factors) and as
34 for a two-tailed, paired t-test with a medium effect
of d = 0.5.
The preference of users when editing larger ob-
jects as well as the remaining aspects are researched
in an exploratory fashion. We therefore analyse cen-
tral tendencies and effect sizes to identify trends in the
pairwise differences between the scores. To identify
which kind of updates are preferred overall (RQ2),
we compute a favored method based on the afore-
mentioned score via majority vote. Furthermore, we
directly asked the participants to select their favorite
method, as well as to rate them based on whether they
would buy them, to construct a metric similar to a Net
Promoter Score (NPS). To answer what is the general
attitude towards path tracing for scene editing (RQ3),
we asked questions about the frequency of working
with path tracing and reasons for not using it during
scene editing. Moreover, we conducted structured in-
terviews with the artists at the end of the study, asking
why they preferred a method, how they estimate the
future relevance of physically-based rendering in their
field of work, and what they would consider helpful
during scene editing with real-time path tracing.
4.2 Technical Setup and Participation
The survey was implemented as a self-hosted Dru-
pal Webform and the full questionnaire, as well as
the anonymized collected data and R code used for
the evaluation, can be found online (Ulschmid et al.,
2023). We use three different scenes from the Bitterli
Rendering Resources (Bitterli, 2016): The Contem-
porary Bathroom, the Country Kitchen, and The Grey
& White Room. We refer to them simply as Bathroom,
Kitchen, and Living Room.
Since hardware-accelerated path tracing requires
an Nvidia RTX GPU or comparable, we offered the
artists three ways to participate: They could attend in
person to perform the study on one of our PCs with an
Nvidia RTX 3070 Ti, or online by either executing the
program on their own hardware or streaming from our
PC by remote controlling it via Parsec (Parsec Cloud
Inc., ). Under all three circumstances, we recorded
screen and audio for the duration of the study, to make
sure the experiment conditions were comparable for
all participants, as well as for further evaluation. In
the online cases, we supervised the experiment via in-
ternet telephony while participants working on their
Table 1: Number of tasks per edit type and scene. Transfor-
mational edits include moving and rotating objects. Mate-
rial edits involve changing albedo and roughness values of
objects or emissive parameters of lights/environment maps.
Scene Edit
Small
Objects
Large
Objects
Lights
Kitchen
Transform 1 1 -
Material 1 1 2
Living
Room
Transform 1 1 -
Material 1 - 1
Sum 4 3 3
own hardware instead of streaming from ours were
sharing their screens.
The artists were asked to voice their thoughts dur-
ing the study, and we conducted a structured inter-
view directly after the experiment. For evaluation
purposes, the voice recordings were transcribed us-
ing OpenAIs speech-to-text system Whisper (Radford
et al., 2022).
Throughout the entire questionnaire as well as in
the Falcor framework we obfuscated the names of the
rendering methods using letters. We also hid all UI el-
ements except the needed transformational, material,
and rendering parameters.
4.3 User Study Design
For the representative of conventional re-rendering
with denoising, we use the AI-accelerated Nvidia Op-
tiX denoiser (Chaitanya et al., 2017), as it produced
higher-quality results than SVGF in our quantitative
analysis, while still being interactive.
Before beginning the experiment, participants
were asked to sign a consent form. The study itself
consists of three parts: an introductory tutorial, the
task-based evaluation of the three methods (denoiser,
noisy incremental, denoised incremental) in three dif-
ferent editing scenarios (small objects, large objects,
lights), as well as some general and demographic
questions at the end. We intentionally searched for
artists from diverse backgrounds and different experi-
ence levels to achieve better generalizability.
Tutorial. The tutorial explained these necessary el-
ements of the UI to the participants (see section 3) and
allowed them to practice by executing four exemplary
tasks in the Bathroom scene using the basic 1 spp ren-
dering without any additional features enabled. The
artists were also instructed to use predefined cam-
era viewports but were allowed to move the camera
if they really needed it to not interrupt their artistic
workflow. However, we ensured that they would al-
ways stay at the same distance from the object. The
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
52

Table 2: Format of the Likert items for the adapted scale
used for the extended NASA-TLX questions and their nu-
merical mapping applied during the evaluation.
Worse
than
1spp
Same
as
1spp
Slightly
better
than 1spp
Better,
but still
flawed
Mostly
like con-
verged
Almost
equivalent
Same as
converged
-1
0
1 2
3
4
5
tutorial also provided a short text explaining the cur-
rent limitations of real-time path tracing and showed
two prerecorded videos of a cup moving in the Bath-
room scene, one with a 1 spp noisy re-rendering and
one with 4096 spp plus denoising with OptiX. The lat-
ter was supposed to serve as a reference for an imagi-
nary approach that instantly converges.
Task-based Evaluation. During the task-based
evaluation, participants performed multiple editing
tasks in both the Kitchen and Living Room scene (see
Table 1) for each of the three editing scenarios and the
three rendering methods, yielding nine combinations
in total. After each condition, the artists were asked
to rate the experienced method. For the incremental
approaches, we additionally asked which rendering
parameters (tile quality/size, threshold) they changed
and which settings they preferred (see subsection 3.1).
The order of the tasks and scenarios was fixed,
whereas we randomized the order of the rendering
methods so participants would either first encounter
the conventional or the incremental techniques (in the
order noisy then denoised).
To rate the experienced combination of scenario
and method, we used a questionnaire based on the
standardized NASA Task Load Index (NASA-TLX)
(Hart and Staveland, 1988), which is comprised of six
questions measuring the perceived workload of tasks.
We added two questions to assess focus and distrac-
tion and dropped the question on physical demand as
we deemed it less relevant for our purposes, resulting
in seven questions in total.
Scale Design. After conducting a small pilot study
with four participants, we also decided to change the
scale of the answers from the original range with
21 gradations to Likert items with seven levels as
can be seen in Table 2 following the construction
guidelines in (South et al., 2022). The pilot partic-
ipants were confused about the comparison point to
use for the first encountered method. In response to
this, we introduced the tutorial, where they experi-
ence the conventional 1 spp noisy re-rendering ap-
proach themselves and watch a video of how one of
the editing tasks would look like if we could produce
high-quality renderings in real-time. We requested
the artists to rate the experienced rendering methods
in comparison to the basic 1 spp approach and the
imaginary converged solution. In using these descrip-
tions for our adapted seven-point scale, the partici-
pants were provided with the reference points they re-
ported as missing during the pilot study.
4.4 Results
We use an alpha level of α = 0.05 for all statistical
tests and, in case of multiple testing, report adjusted
p-values for better readability. As effect sizes we re-
port, depending on applicability, Cohen’s d (< 0.5
small, [0.5, 0.8] medium, > 0.8 large), Cram
´
er’s V
(0.1 small, 0.3 medium, 0.5 large) and the general-
ized eta squared η
2
g
(Cohen, 1988). As we did not find
any similar studies on our topic, we use the standard
interpretation of η
2
for η
2
g
(< 0.06 small, [0.06, 0.14]
medium, > 0.14 large).
For the task-based evaluation, following the orig-
inal formulation of Likert-typed scales (South et al.,
2022), we aggregated the extended NASA-TLX ques-
tions by averaging the individual Likert items. The
aggregation is computed for each combination of sce-
nario and method on participant level, resulting in
nine scores for each participant. This procedure is
also referred to as Raw TLX (Hart, 2006). As the
same participant ranked all of the combinations dur-
ing the study and the individual ratings are thus de-
pendent on the subject, we use paired or repeated
measure methods.
Study Population. Out of the 21 artists (m=15, f=4,
d=2) who completed the survey, ten were profes-
sionals from the industry, and eleven were students
from universities. Their experience measured in hours
spent using 3D rendering software ranged from ’50-
99’ to ’10,000+’ hours (Median Mdn: ’1,000-4,999’,
interquartile range IQR: [’100-499’, ’5,000-9,999’])
and participants’ ages ranged from 21 to 51 (Mean
M: 30.48, standard deviation SD: 7.79).
Eleven executed the tasks with the denoiser first
and ten always the incremental methods first. Eight
artists participated via Parsec or on their own hard-
ware, while five performed the tasks in person at our
office. The results of further questions about the study
population are reported in Table 3. Most artists com-
pleted the study in roughly one hour.
Assumption Testing. The applied statistical tech-
niques require the data to fulfill the following assump-
tions: no significant outliers, normality, and spheric-
ity. The sphericity assumption requires that the vari-
ances of the pairwise differences are equal. To test
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
53

Editing Scenario
Small Objects Large Objects Lights
Favor Optix Denoiser
Favor Incremental
−4
−2
0
2
4
Small Objects Large Objects Lights
Editing Scenario
Difference in the aggregated Score
Favorite Incremental − Optix Denoiser
Favor Optix Denoiser
Favor Noisy Incremental
−4
−2
0
2
4
Small Objects Large Objects Lights
Editing Scenario
Difference in the aggregated Score
Noisy Incremental − Optix Denoiser
Favor Optix Denoiser
Favor Denoised Incremental
−4
−2
0
2
4
Small Objects Large Objects Lights
Editing Scenario
Difference in the aggregated Score
Denoised Incremental − Optix Denoiser
Favor Denoised Incremental
Favor Noisy Incremetal
−4
−2
0
2
4
Small Objects Large Objects Lights
Editing Scenario
Difference in the aggregated Score
Noisy Incremetal − Denoised Incremental
p=0.372 p=0.364 p=0.101 p=0.057 p=0.723 p=0.096 p=0.44 p=0.177 p=0.089 p=2.4e−04 p=0.081 p=0.051
Pairwise Differences between the Rendering Methods by Editing Scenario
Figure 5: Top row: Box plots of the pairwise differences in the averaged score of the task-based evaluation. If the difference
between two methods is positive, the method named first was favored. If it is negative, the method named second was favored.
The respective means are depicted with a diamond shape and outliers as stars, whereas extreme outliers are colored red.
Bottom row: quantile-quantile (QQ) Plots of the pairwise differences by editing scenario and results of Shapiro-Wilk tests. If
the p-value is larger than the assumed significance level of α = 0.05, we may assume a normal distribution.
Table 3: Artistic background of the study population. For
all questions, except the path tracer usage, selecting multi-
ple answers was possible.
Results of the general questions
Field of Work Used Denoisers Path Tracer Usage
Games 14 OptiX 12 Never 4
Digital Art 11 Intel 5 Occasionally 9
Animation 9 None 2 Regularly 7
Architecture Vis. 6 Vdenoise 2 Every time 1
Other 9 Other 5
Used Software Reasons for not using a Path Tracer
Blender 18 Waiting time for clear image too long 16
Unity 3D 15 Real-time approx. good enough 10
Unreal Engine 10 Used software has no Path Tracer 7
Maya 9 Only using for final image 6
3ds Max 7 Initial noise/blurryness is distracting 5
ZBrush 6 Necessary hardware not available 2
Other 14
this we use Mauchly’s Test, which is significant (p =
0.041, ε = 0.743), meaning the assumption is violated.
There are no outliers on the aggregated values.
However, when looking at the pairwise differences
between the methods by participant and scenario de-
picted in Figure 5, we found two significant outliers:
one on the difference between noisy incremental and
denoised incremental for small objects and one on the
difference between the denoiser and denoised incre-
mental for lights. As removing the respective values
led to similar overall results, we left the outliers in the
data for the main analysis, but reported both results
where appropriate.
To test if the data is normally distributed we use
a Shapiro-Wilk test on the pairwise differences. The
resulting p-values, as well as QQ plots, can be seen
in Figure 5. The only pairwise difference violating
the normality assumption is between noisy incremen-
tal and denoised incremental for small objects. By
looking at the QQ plot we identify the same outlier as
above as being responsible. Removing it would lead
to a value of p = 0.527, however with the same rea-
soning as before we decided to leave it in the data.
ANOVA and t-Test Results. To analyze the in-
teraction between the rendering method and edit-
ing scenario on the score aggregated by participants,
we performed a two-way repeated measures ANOVA
with the scenario as the focal variable and the used
method as the moderator variable. As the spheric-
ity assumption is violated, we apply the conservative
Greenhouse–Geisser correction. We found a statisti-
cally significant interaction between the rendering ap-
proach and editing scenario on the aggregated value
(F(2.97, 59.42) = 5.29, p = 0.003, η
2
g
= 0.03).
Therefore, we analyzed the effect of the used
method for each scenario, reporting p-values ad-
justed using the Bonferroni multiple testing correc-
tion method. Using one-way ANOVAs, the simple
main effect of the rendering approach was found to
be only significant for small objects (p = 0.03, η
2
g
=
0.06). Pairwise comparisons using paired t-tests show
that for small objects, the mean aggregated value was
significantly different between using the denoiser and
the denoised incremental method (p = 0.026, d =
0.63) and between the noisy and denoised incremental
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
54
*
*
0
2
4
Small Objects Large Objects Lights
Editing Scenario
Aggregated Score
Method
Optix
Denoiser
Noisy
Incremental
Denoised
Incremental
Anova, F(2.97,59.42) = 5.29, p = 0.003, η
g
2
= 0.03
Averaged Task Question Score by Rendering Method and Editing Scenario
pwc: T test; p.adjust: Bonferroni
(a)
0
4
8
12
Incremental
Update
Global
Update
Preference
Number of Participants
Method
Optix
Denoiser
Noisy
Incremental
Denoised
Incremental
Selected in the General Section
Overall prefered Method
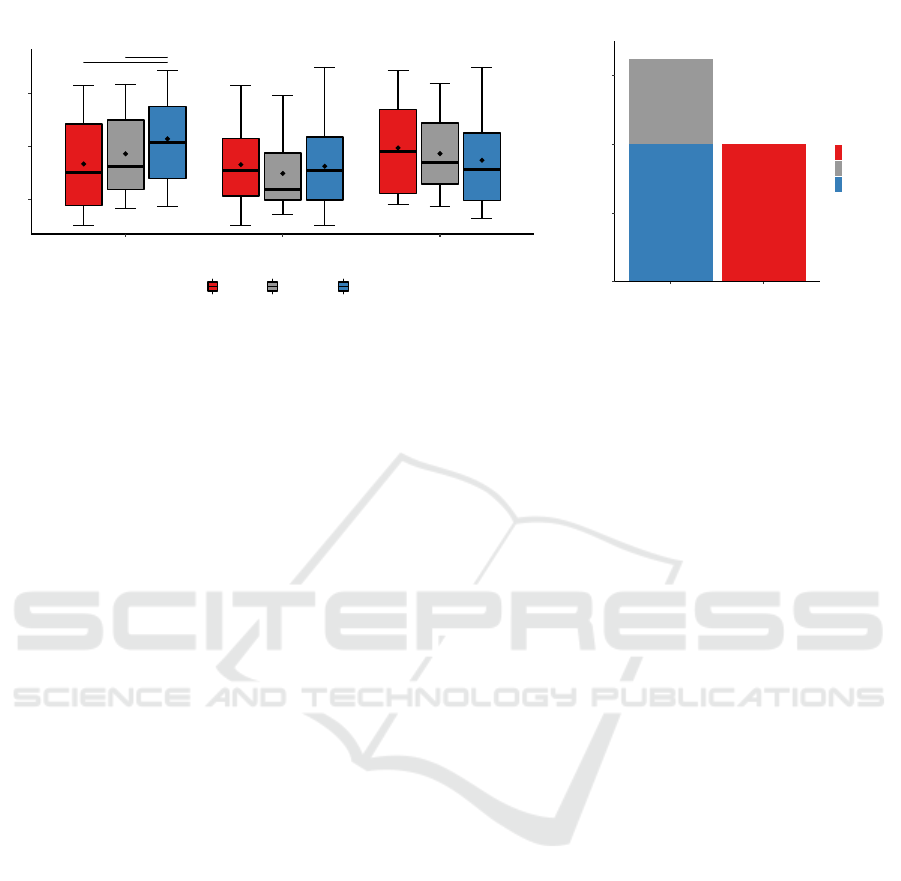
(b)
Figure 6: (a) Box plot of the aggregated score of the task-based evaluation part of the survey (♦: mean, *: α < 0.05). (b) Bar
plot showing the favorite rendering approach selected in the general section at the end of the questionnaire.
method (p = 0.05, d = 0.57; with outlier removed p =
0.025, d = 0.66). There is no significant difference for
light edits between using the denoiser and the noisy (p
= 1, d = 0.15) or denoised (p = 0.69, d = 0.27; with
outlier removed p = 0.079, d = 0.54) incremental ren-
dering technique (see Figure 6a).
Analysis of Differences. When looking at the pair-
wise differences between the rendering methods at
per-participant level for each scenario depicted in Fig-
ure 5, we observed a trend in central tendency be-
tween the OptiX denoiser and the denoised incremen-
tal method that the participants of our study seemed to
favor the denoised incremental method for small ob-
jects (M: 0.948, SD: 1.50) and the denoiser for light
edits (M: -0.464, SD: 1.72). By looking at the dif-
ferences between the noisy and denoised incremental
approach, however, it can be noticed that while for
small objects the denoised method was preferred (M:
-0.564, SD: 0.988), for light edits the noisy method
was favored slightly more (M: 0.25, SD: 0.958).
To analyze in a more general fashion whether a
global or incremental update method is preferred, we
extracted the favorite incremental method per partici-
pant and scenario by choosing the one with the high-
est aggregated score. We then compared this favorite
to the denoiser. The results for edits on small objects
approximately remain the same, whereas for light ed-
its the differences become closer to zero (M: 0.014,
SD: 1.53). When editing large objects, the differences
between the rendering approaches are roughly zero-
centered for all combinations.
Overall Preference. We furthermore computed
which rendering method artists preferred overall ac-
cording to the task-based evaluation. For this, we first
extracted the favored method for each of the three
editing scenarios by taking the one with the highest
aggregated score. Then the overall favorite is deter-
mined by a majority vote. The results can be seen
in Figure 7a. Most participants preferred incremen-
tal over global updates, which is confirmed by di-
rectly asking the artists at the end of the study as
well, as can be seen in Figure 6b. There is, how-
ever, no statistically significant relation between the
two favorites (Fisher’s exact test (FET), p = 0.46, V
= 0.37). We identified a significant association be-
tween the favorite for the light editing scenario and
the overall preferred method stated at the end of the
survey (FET, p = 0.043, V = 0.47). The majority vote
favorite is also significantly associated with the pref-
erence for edits on large objects (FET, p = 0.004, V
= 0.65) and lights (FET, p = 0.004, V = 0.68). These
values are illustrated in Figure 7c.
Net Promoter Score. To compute a metric similar
to a NPS based on the question if artists would buy
the respective rendering approach as a feature in a 3D
software, we subtracted the percentage of participants
rating higher than seven on a scale from zero to ten
from those rating lower than six. We decided to use a
slightly lower threshold than for a normal NPS, as the
overall ratings were also rather low. The computed
scores are depicted in Figure 7b.
Parameter Settings. Regarding the rendering pa-
rameters, participants favored higher tile qualities for
editing smaller objects (noisy Mdn: 64, denoised
Mdn: 128) and lower quality for larger objects and
light edits (Mdn: 16). The median setting for tile size
was 16, except for the denoised incremental method
in the small objects scenario, where it was 24. For
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
55

0
2
4
6
8
10
Incremental
Update
Global
Update
Undecided
Preference
Number of Participants
Method
Optix
Denoiser
Noisy
Incremental
Denoised
Incremental
Undecided
Computed via Majority Vote
Overall prefered Method
(a)
nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1nps = −38.1 nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9nps = −61.9 nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81nps = −23.81
0
2
4
6
8
10
Optix
Denoiser
Noisy
Incremental
Denoised
Incremental
Method
NPS Score
Method
Optix
Denoiser
Noisy
Incremental
Denoised
Incremental
Raw Data for Net Promoter Score
(b)
0.08
0.32
0.53
0.33
0.21
0.65
0.38
0.68
0.47 0.37
* *
*
small obj.
large obj.
lights
majority vote
large obj.
lights
majority vote
stated
Association (Cramer's V) between Favorites
(c)
Figure 7: (a) Overall preferred rendering approach of the artists extracted by a majority vote between the three methods
with the highest average score for each editing scenario. (b) Box plot showing the distribution of ratings when asking artists
whether they would buy the respective rendering method as a feature in a 3D software. Based on these ratings we computed
a metric similar to a NPS, which is stated on top of the box plots. (c) Association computed via Cramer’s V between the
favorite method for a certain task derived from the averaged scores (Figure 6a) and the overall favorite either calculated via a
majority vote or stated by the artists themselves in the survey.
the threshold parameter, larger values were preferred
(Mdn: ’101-200’).
5 DISCUSSION & CONCLUSION
Regarding our first research question RQ1, we found
a statistically significant increase in a score mea-
suring participant-wise preference for using the de-
noised incremental approach when editing small ob-
jects by performing an ANOVA and pairwise t-tests.
For larger objects, no clear favorite method could be
determined. In the case of editing the lighting of a
scene, there is a minor, however not statistically sig-
nificant trend in central tendencies to favor the tech-
nique with global updates. The study is slightly un-
derpowered w.r.t. the a-priory power analysis for pair-
wise t-tests. However, we observed larger effect sizes
than assumed.
Overall and in answer to our second research
question RQ2, rendering with incremental updates
seems to be favored according to a preference both
computed via majority vote between the three inves-
tigated scenarios and extracted by directly asking the
participants at the end, as well as to a NPS-like metric.
On the other hand, artists mentioned during a struc-
tured interview that none of the methods perfectly
caters to their needs so far and they would thus still
mainly edit scenes using less ideal real-time approx-
imations, resolving RQ3. However, the future rele-
vance of accurate, physically based methods for final
render results is still high for the movie industry and
even infiltrates high-performance businesses such as
computer games.
In summary, we presented two adaptive, priority-
based re-rendering approaches designed for interac-
tively editing a 3D scene with MC path tracing. Us-
ing a tile-based approach, we can efficiently update
image regions with higher quality in an incremental
fashion, applying an importance metric based on the
Chebyshev distance. Our quantitative and qualitative
evaluation shows that for localized edits, in particular,
our incremental approach reduces noise levels and is
preferred by artists. While we tried to choose a di-
verse study population with different backgrounds, as
well as various editing scenarios in multiple scenes,
our results may not generalize. Future work could
extend the building blocks of the incremental meth-
ods by combining them with higher quality denoisers,
such as Intel’s OIDN (Intel, 2019). Furthermore, the
priority policy could be refined, based on fast approx-
imations of global illumination, which would allow
for better incremental updates for indirect (lighting)
effects. Gradient-based techniques and difference im-
ages could be integrated to enable automatic param-
eter selection (Rousselle et al., 2016). Overall, our
evaluation provides a strong motivation to pursue fur-
ther methods for automatic, priority-based, and inter-
active re-rendering techniques for creative processes.
ACKNOWLEDGEMENTS
This research was funded by FWF project F77 (SFB
Advanced Computational Design SP4) and by WWTF
project ICT22-055 (Instant Visualization and Inter-
action for Large Point Clouds). We also thank our
students Pascal Hann and Nina Semmelrath for their
contributions.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
56

REFERENCES
Bitterli, B. (2016). Rendering resources. https://
benedikt-bitterli.me/resources/.
Chaitanya, C. R. A., Kaplanyan, A. S., Schied, C., Salvi,
M., Lefohn, A., Nowrouzezahrai, D., and Aila, T.
(2017). Interactive reconstruction of monte carlo im-
age sequences using a recurrent denoising autoen-
coder. ACM Trans. Graph., 36(4).
Cohen, J. (1988). Statistical Power Analysis for the Behav-
ioral Sciences. Lawrence Erlbaum Associates, 2nd
edition.
Faul, F., Erdfelder, E., Lang, A.-G., and Buchner, A. (2007).
G*power 3: A flexible statistical power analysis pro-
gram for the social, behavior, and biomedical sci-
ences. Behavior Research Methods Instruments &
Computers, 39:175–191.
G
¨
unther, T. and Grosch, T. (2015). Consistent Scene Editing
by Progressive Difference Images. Computer Graph-
ics Forum.
Hachisuka, T., Jarosz, W., Weistroffer, R. P., Dale, K.,
Humphreys, G., Zwicker, M., and Jensen, H. W.
(2008). Multidimensional adaptive sampling and re-
construction for ray tracing. ACM Trans. Graph.,
27(3):1–10.
Hart, S. (2006). Nasa-task load index (nasa-tlx); 20 years
later. volume 50.
Hart, S. G. and Staveland, L. E. (1988). Development of
nasa-tlx (task load index): Results of empirical and
theoretical research. In Human Mental Workload, vol-
ume 52 of Advances in Psychology, pages 139–183.
Hasselgren, J., Munkberg, J., Salvi, M., Patney, A., and
Lefohn, A. (2020). Neural temporal adaptive sam-
pling and denoising. Computer Graphics Forum,
39:147–155.
Intel (2019). Open image denoise. https://www.
openimagedenoise.org/.
Kajiya, J. T. (1986). The rendering equation. SIGGRAPH
Comput. Graph., 20(4):143–150.
Kallweit, S., Clarberg, P., Kolb, C., Davidovi
ˇ
c, T., Yao,
K.-H., Foley, T., He, Y., Wu, L., Chen, L., Akenine-
M
¨
oller, T., Wyman, C., Crassin, C., and Benty, N.
(2022). The Falcor rendering framework. https:
//github.com/NVIDIAGameWorks/Falcor.
Kuznetsov, A., Kalantari, N. K., and Ramamoorthi, R.
(2018). Deep adaptive sampling for low sample count
rendering. Computer Graphics Forum, 37.
Mitchell, D. P. (1987). Generating antialiased images at
low sampling densities. SIGGRAPH Comput. Graph.,
21(4):65–72.
Murakami, K. and Hirota, K. (1992). Incremental Ray Trac-
ing, pages 17–32. Springer Berlin Heidelberg.
Myrodia, V. (2021). Psychophysical studies on Monte Carlo
rendering-noise visual perception. PhD thesis.
Nvidia (2018). NVIDIA TURING GPU ARCHITEC-
TURE. Technical report.
NVIDIA (2021). Nvidia real-time denoisers. https://
developer.nvidia.com/rtx/ray-tracing/rt-denoisers.
Overbeck, R. S., Donner, C., and Ramamoorthi, R. (2009).
Adaptive wavelet rendering. ACM Trans. Graph.,
28(5):1–12.
Parsec Cloud Inc. Parsec. https://parsec.app/.
Pharr, M., Jakob, W., and Humphreys, G. (2016). Physi-
cally Based Rendering: From Theory to Implementa-
tion. Morgan Kaufmann Pub. Inc., 3rd edition.
Ponomarenko, N., Ieremeiev, O., Lukin, V., Egiazarian, K.,
and Carli, M. (2011). Modified image visual quality
metrics for contrast change and mean shift account-
ing. In The Experience of Designing and Application
of CAD Systems in Microelectronics, pages 305–311.
Ponomarenko, N., Silvestri, F., Egiazarian, K., Carli, M.,
Astola, J., and Lukin, V. (2007). On between-
coefficient contrast masking of dct basis functions.
Proc. of the 3rd Int. Workshop on Video Processing
and Quality Metrics for Consumer Electronics.
Radford, A., Kim, J. W., Xu, T., Brockman, G., McLeavey,
C., and Sutskever, I. (2022). Robust speech recogni-
tion via large-scale weak supervision.
Rousselle, F., Jarosz, W., and Nov
´
ak, J. (2016). Image-
space control variates for rendering. ACM Trans.
Graph., 35(6).
Schied, C., Kaplanyan, A., Wyman, C., Patney, A., Chai-
tanya, C. R. A., Burgess, J., Liu, S., Dachsbacher,
C., Lefohn, A., and Salvi, M. (2017). Spatiotempo-
ral variance-guided filtering: Real-time reconstruction
for path-traced global illumination. In Proc. of High
Performance Graphics. ACM.
Schied, C., Peters, C., and Dachsbacher, C. (2018). Gra-
dient estimation for real-time adaptive temporal filter-
ing. Proc. ACM Comput. Graph. Interact. Tech., 1(2).
Schmidt, T.-W., Pellacini, F., Nowrouzezahrai, D., Jarosz,
W., and Dachsbacher, C. (2014). State of the art in
artistic editing of appearance, lighting, and material.
Computer Graphics Forum, 35.
South, L., Saffo, D., Vitek, O., Dunne, C., and Borkin,
M. A. (2022). Effective Use of Likert Scales in Vi-
sualization Evaluations: A Systematic Review. CGF.
Thomas, M. M., Liktor, G., Peters, C., Kim, S.,
Vaidyanathan, K., and Forbes, A. G. (2022). Tempo-
rally stable real-time joint neural denoising and super-
sampling. Proc. ACM Comput. Graph. Interact. Tech.,
5(3).
Ulschmid, A., Kerbl, B., Kr
¨
osl, K., and Wim-
mer, M. (2023). https://github.com/cg-tuwien/
Prioritized-ReRendering.
Wyman, C. and Panteleev, A. (2021). Rearchitecting spa-
tiotemporal resampling for production. In High-
Performance Graphics - Symposium Papers. The Eu-
rographics Association.
Zhdan, D. (2021). Reblur: A hierarchical recurrent de-
noiser. In Ray Tracing Gems II, pages 823–844.
Zwicker, M., Jarosz, W., Lehtinen, J., Moon, B., Ra-
mamoorthi, R., Rousselle, F., Sen, P., Soler, C., and
Yoon, S.-E. (2015). Recent advances in adaptive sam-
pling and reconstruction for monte carlo rendering.
Comput. Graph. Forum, 34(2):667–681.
Real-Time Editing of Path-Traced Scenes with Prioritized Re-Rendering
57
