
Machine Learning-Based Classification of Hardware Trojans in FPGAs
Implementing RISC-V Cores
Stefano Ribes
1
, Fabio Malatesta
2
, Grazia Garzo
3
and Alessandro Palumbo
4 a
1
Department of Computer Science and Engineering, Chalmers University of Technology, Sweden
3
University of Siena, Italy
4
CentraleSup
´
elec, Inria, Univ Rennes, CNRS, IRISA, France
Keywords:
Hardware Security, Machine Learning, Hardware Trojans, Feature Importance, FPGA, RISC-V.
Abstract:
Hardware Trojans (HTs) pose a severe threat to integrated circuits, potentially compromising electronic de-
vices, exposing sensitive data, or inducing malfunction. Detecting such malicious modifications is particu-
larly challenging in complex systems and commercial CPUs, where they can occur at various design stages,
from initial HDL coding to the final hardware implementation. This paper introduces a machine learning-
based strategy for the detection and classification of HTs within RISC-V soft cores implemented in Field-
Programmable Gate Arrays (FPGAs). Our approach comprises a systematic methodology for comprehensive
data collection and estimation from FPGA bitstreams, enabling us to extract insights ranging from hardware
performance counters to intricate metrics like design clock frequency and power consumption. Our ML mod-
els achieve perfect accuracy scores when analyzing features related to both synthesis, implementation results,
and performance counters. We also address the challenge of identifying HTs solely through performance
counters, highlighting the limitations of this approach. Additionally, our work emphasizes the significance of
Implementation Features (IFs), particularly circuit timing, in achieving high accuracy in HT detection.
1 INTRODUCTION
The threat of malicious undesired modifications in in-
tegrated circuits is especially relevant in the current
global economy, where complex electronic devices,
such as commercial CPUs, are often designed, man-
ufactured and sold by different companies in differ-
ent countries (DIGITIMES, 2012). CAD tools used
throughout their design cycle can be produced by
other companies, typically independently from the
design and manufacturing processes. On top of that,
the IP building blocks included in such devices are
often purchased from yet different parties (Roy et al.,
2008), (Potkonjak, 2010). As several actors have ac-
cess to the production flow, there are multiple stages
where a malicious hardware modification, known as
Hardware Trojan (HT), may undergo (Rostami et al.,
2013). Hence, it is challenging to demonstrate that
the integrity of a manufactured product of such com-
plexity has not been compromised. Even minor, mali-
cious, hardware changes can have devastating effects,
such as allowing an attacker to acquire supervisor
a
https://orcid.org/0000-0002-0034-6189
privileges, obtain a cryptographic key, or even exe-
cute malicious software, as demonstrated in (Jin et al.,
2012), (Tsoutsos and Maniatakos, 2014), (Wang et al.,
2012). A notable example of HT giving supervi-
sor mode permissions, the Rosenbridge backdoor,
was found in 2018 in a commercial Via Technolo-
gies C3 processor (Domas, 2018). These results se-
riously question the security of any modern system
and call for a reliable and efficient way of identifying
compromised CPU devices, ideally at the end-user
level (Nikiema et al., 2023), (Cassano et al., 2022).
Being not only able to identify but also to classify a
malicious HT in a device could allow the end-user to
gain insights on the threat and counter-attack it either
in the chip itself, if necessary when a viable solution,
or when developing defense mechanisms for future
designs.
Incorporating Machine Learning (ML) into the
realm of integrated circuit security presents a promis-
ing direction for addressing the challenge of detect-
ing and classifying HTs, potentially overcoming tra-
ditional methods for identifying malicious modifica-
tions. ML algorithms, powered by advanced algo-
rithms and computational capabilities, offer a data-
Ribes, S., Malatesta, F., Garzo, G. and Palumbo, A.
Machine Learning-Based Classification of Hardware Trojans in FPGAs Implementing RISC-V Cores.
DOI: 10.5220/0012324200003648
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Information Systems Security and Privacy (ICISSP 2024), pages 717-724
ISBN: 978-989-758-683-5; ISSN: 2184-4356
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
717
driven approach to this problem. By analyzing intri-
cate patterns and anomalies in the behavior of inte-
grated circuits, ML models can enhance our ability to
uncover hidden threats.
2 CONTRIBUTIONS
We summarize our contributions to the field of HT
detection and classification as follows:
• A systematic methodology for an extensive col-
lection and estimation of numerical data from
FPGA bitstreams: our proposed approach in-
cludes the extraction of valuable insights from
the soft RISC-V microprocessor, spanning var-
ious data sources, including hardware perfor-
mance counters, and extending to more complex-
to-acquire metrics such as, for instance, design
clock frequency and power consumption.
• ML model performance and robustness: we
demonstrate the high performance and robustness
of our ML model to address the unexplored chal-
lenge of detecting and classifying HTs introduced
by an untrusted CAD tool in a trusted IP core.
• Comprehensive feature evaluation: we conduct
an extensive exploration of feature importance
in ML-based HT detection and classification.
Our experiments suggest a critical role of fea-
tures derived from the synthesis and implemen-
tation process in achieving high models’ perfor-
mance. We further leverage Uniform Manifold
Approximation and Projection (UMAP) (McInnes
et al., 2018) to visually confirm the significance of
bitstream-related input features, such as the num-
ber of used LUTs in the design or the circuit’s
worst negative slack.
3 RELATED WORK
Most of the existing work on HT focuses on system-
level implementation methodologies that allow the
user to obtain a trusted system even when containing
untrusted components (
ˇ
Si
ˇ
sejkovi
´
c et al., 2019), (Shila
et al., 2015), (Basak et al., 2017). One way to do this
is by running trustworthy software on systems with an
untrusted CPU (Dubeuf et al., 2013), (Bloom et al.,
2009), (Arıkan et al., 2022).
During the last two decades, several techniques to
limit HTs effects by detecting them before system de-
ployment have been proposed. They generally consist
of circuit-level approaches that aim at detecting HTs
at design time via logic testing (Chuan et al., 2017),
RTL
Design
Layer
Netlist
High-Level
Simulation
Place &
Route
P&R
Netlist
Low-Level
Simulation
SW
Bench
IF
PF
Impl. and Perf. Counter Features
PF
Train
Set
Test
Set
Cross-Val.
Training
Evaluation
Cleaned and Split Datasets
Model
Performance
and Scores
XGBoost Model
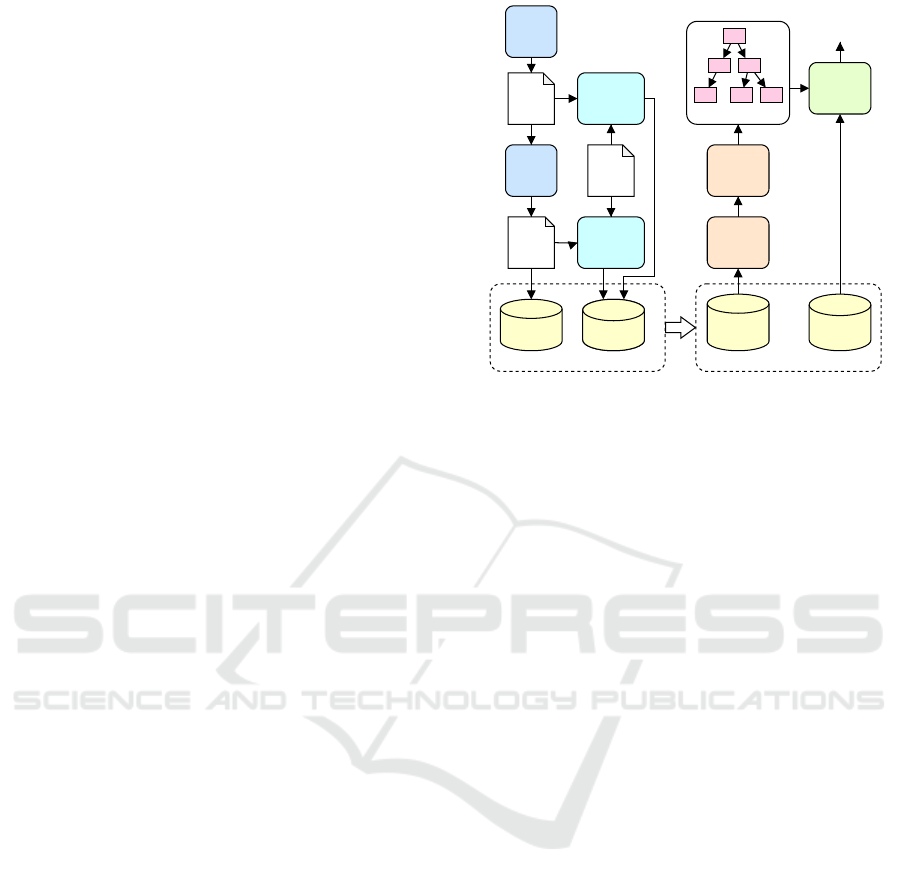
Figure 1: Overview of the data collection pipeline and mod-
els’ training and evaluation.
formal property verification (Zhang et al., 2015),
side-channel analysis (Liu et al., 2017), structural
and behavioral analysis (Salmani and Tehranipoor,
2013), (Salmani and Tehranipoor, 2012), (Palumbo
et al., 2021), and machine learning (Dong et al.,
2019), (Huang et al., 2020).
Regarding possible attacking fronts, CAD tools
can become a threat to FPGA-based systems se-
curity (Sunkavilli et al., 2021b), (Zhang and Qu,
2019), (Duncan et al., 2019). In particular, they may
interfere directly with the FPGA configuration by in-
jecting HTs in the produced bitstream (Ender et al.,
2019), (Sunkavilli et al., 2021a). To the best of our
knowledge, detecting HTs introduced by an untrusted
CAD tool in a trusted IP core has been explored in
a limited manner in prior research. In order to pre-
vent malicious CAD tools, a security rule checking
paradigm has recently been proposed for driving the
adoption of CAD tools supporting the trustworthiness
and security of systems throughout the whole design
process (Xiao et al., 2016). For checking the trust-
worthiness of CAD tools, in (Palumbo et al., 2022) is
proposed a ML-based solution to detect the presence
of HTs in FPGA bitstreams.
4 METHODOLOGY
This section outlines our methodology, which covers
data collection and cleaning, followed by ML model
selection and implementation for classifying HTs.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
718

4.1 System Setup for Data Collection
Figure 1 shows the followed steps to define, train and
evaluate the ML-based models for classifying HTs.
On the left side of the figure, we report the FPGA-
related flow, which aims at extracting and gather rele-
vant features from the RISC-V bitstreams. Our fea-
ture extraction process started with the implemen-
tation of the RTL design of a soft 3-stage pipeline
RISC-V Ibex processor, which was further modified
to include one of four potential HT models described
in Trust-Hub (Shakya et al., 2017), i.e., Clk Mod,
Critical, MitM, and Fetch. In our detection and
classification modeling, we categorized HTs as either
“triggered” or “not-triggered”, with the exception of
the Critical HT, which operates continuously. The
selected HT models are detailed as follows:
• Clk Mod. This model corresponds to the B15-
T100 model in the Trust-Hub platform. It encom-
passes an HT capable of slowing down the mi-
croprocessor’s clock, thereby impacting program
throughput and potentially causing a denial-of-
service.
• Critical. Inspired by models S35932-T300 and
MAC10GE-T100 from Trust-Hub, this HT model
introduces additional logic into the combinatorial
path. It alters the microprocessor’s timing behav-
ior and performance. It operates as an always-on
HT and can potentially lead to a denial of service.
This HT model has been positioned between the
core’s instruction bus and its instruction memory.
• MitM. Drawing inspiration from the PIC16F84-
T100 Trust-Hub model, the MitM HT simulates
a man-in-the-middle scenario between the micro-
processor and the instruction memory. It requires
a specific trigger event to activate, and once trig-
gered, it modifies fetched instructions, coercing
the execution of a malicious program and result-
ing in changes to the microprocessor’s functional-
ity.
• Fetch. The Fetch HT model is akin to the B19-
T300 model proposed in the Trust-Hub platform.
It interferes with the microprocessor’s fetching
activity, altering the address of loaded instruc-
tions. Similar to MitM, it forces the execution of a
malicious program, thereby modifying the micro-
processor’s behavior and functionality.
Following the completion of the RTL design
phase, we proceeded to execute synthesis, place &
route (P&R), and implementation utilizing the Xil-
inx Vivado toolchain, specifically version 2018.2. We
targeted a Xilinx XC7Z020-1CLG484C Zynq-7000
FPGA. In order to generate a more diverse and realist
Table 1: The used Vivado settings for generating the bit-
streams implementing the altered soft RISC-V micropro-
cessor.
Synthesis Settings Implementation Settings Logic Opt.
Vivado default Vivado default On
Vivado default Vivado default Off
Flow Area Opt. (medium) Ultra Low Fast Methodology On
Flow Area Alternate Routability Ultra Low Fast Methodology On
set of data, we defined four distinct combinations of
synthesis and implementation settings, as detailed in
Table 1, during the bitstream generation phase.
Once our designs were ready, we performed a set
of tests with a software testbench, both during the
synthesis phase, simulating their layer netlist, and
during the P&R phase, simulating their post-P&R
netlist. During simulation, we collected a diverse ar-
ray of features, which can be categorized into two
main groups, as detailed in Table 2. The first subset of
features is derived from hardware performance coun-
ters integrated into the design. This includes metrics
like the number of executed cycles, the count of re-
tired instructions, and more. These measurements are
obtained while running selected benchmarks, which
consist of Coremark, Median, Multiply, Rsort, and
Towers, similarly to what considered in the approach
outlined in (Palumbo et al., 2022).
A second set of collected data reports design char-
acteristics extracted from the FPGA synthesis and im-
plementation phases. These characteristics include
parameters such as design area, quantified in terms of
the number of Look-Up Tables (LUTs) and Flip-Flops
(FFs), as well as timing metrics like worst negative
slack. Furthermore, power consumption and device
temperature trends were also recorded as part of this
data collection.
We subsequently categorize the first group of fea-
tures as “Performance Features” (PFs) and the second
group as “Implementation Features” (IFs). Our data
collection process resulted in a total of 160 data sam-
ples: four distinct HT types with triggering and non-
triggering conditions, as well as a HT-free scenario,
each combined with four different Vivado settings and
five distinct benchmarks.
4.2 Features Extraction from the end
Users’ Perspective
In an industrial context, extracting feature data from
a bitstream that implements a microprocessor, as de-
tailed in Table 2, is a practical and achievable pro-
cess, despite being challenging. In this section, we
propose and discuss a series of methods for collecting
the aforementioned data features from a given FPGA
bitstream.
Machine Learning-Based Classification of Hardware Trojans in FPGAs Implementing RISC-V Cores
719
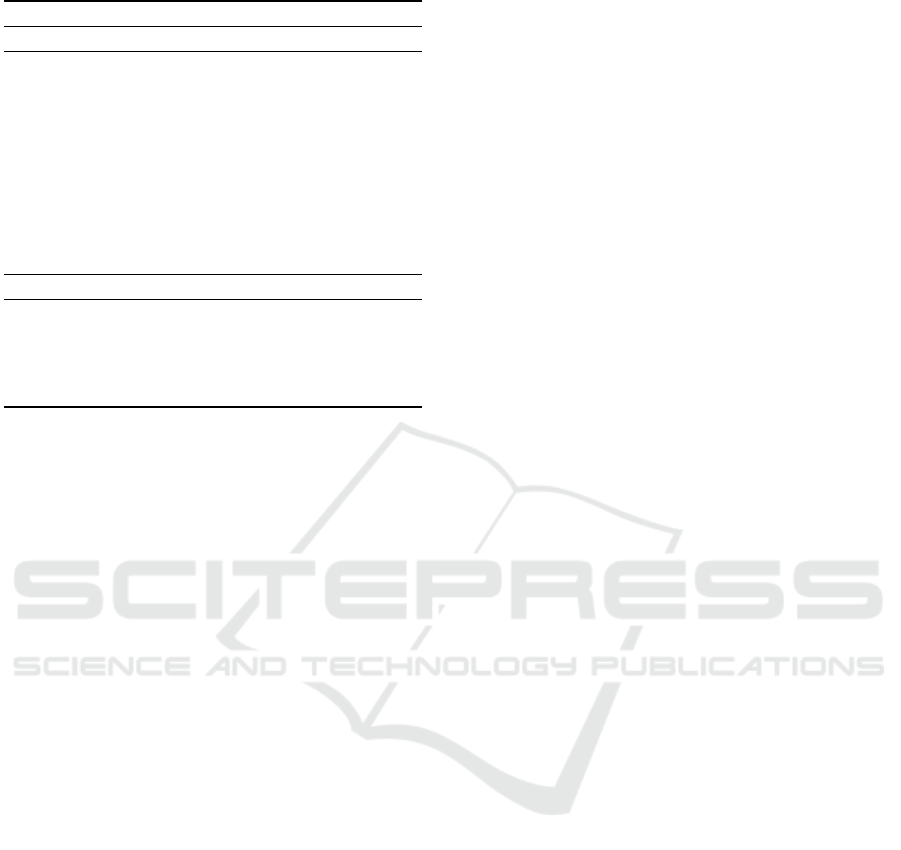
Table 2: Features extracted from the considered dataset.
Feature ID Description
Performance Features (PFs)
Cycles Number of clock cycles to execute the program
InstrRet Number of instructions retired in the program
LSUs Total waiting cycles to access data memory
FetchWait Total waiting cycles before instruction fetch
Loads Number of executed load instructions
Stores Number of executed store instructions
Jumps Number of executed jump instructions
CondBran Number of executed conditional branches
ComprIns Number of executed compressed instruction
TakCBran Number of taken conditional branches
MulWait Cycles for multiplication operation completion
DivdWait Cycles for division operation completion
Benchmark Program under execution (text label)
Implementation Features (IFs)
LUTs Final number of LUTs in the design
FFs Final number of FFs in the design
AvgDynPow Avg. dynamic power consumption [W]
AvgTotPower Avg. total power consumption [W]
Timing Worst negative slack (the circuit critical path) [ns]
Temperature Temperature trend
4.2.1 Performance Features Extraction
PFs comprise the values written by the microproces-
sor into its registers during program execution. These
values can be accessed through versatile interfaces
such as AXI, UART, I
2
C, or dedicated debugging in-
terfaces. Virtually all modern microprocessors offer
dedicated registers for storing predefined and config-
ured hardware performance counters, eliminating the
need for additional hardware modifications to acquire
this data.
4.2.2 Timing and Number of LUTs and FFs
Estimation
The synthesis and implementation of the circuit on
the FPGA via Vivado provide essential information,
including the count of Look-Up Tables (LUTs), Flip-
Flops (FFs), and timing characteristics. Vivado fur-
nishes these metrics directly once the implementation
process is completed. In case users do not have access
to the Vivado reports about detailed timing analysis,
an external tunable clock generator can be leveraged
for retrieving such information, i.e., the circuit’s criti-
cal path slack. By incrementally increasing the clock
frequency until the system experiences its first failure,
it becomes possible to discern when the critical path’s
timing is breached. This frequency corresponds to the
maximum achievable circuit clock frequency, and its
reciprocal defines the worst negative slack. A sim-
ilar discussion can be made for LUTs and FFs: an
estimate of their number can be extracted through re-
verse engineering of the circuit logic netlist. How-
ever, the precise contents of programmed LUTs and
FFs still remains a challenging and impractical en-
deavor (Benz et al., 2012).
4.2.3 Power Consumption Estimation
Vivado provides a reliable method for estimating cir-
cuit power consumption through post-implementation
simulations. This estimation is grounded in
the fidelity of the system’s behavior in post-
implementation test benches, which are considered
the most trustworthy as they exclusively focus on real
signals synthesized and implemented during the pro-
cess. By configuring Vivado settings, one can gener-
ate “SAIF” (Switching Activity Interchange Format)
files that collect power trace data via test-bench sim-
ulations.
4.2.4 Temperature Estimations
Temperature estimations have been obtained through
the Vivado XADC monitor. Such a monitor dumps
the temperature trace over program execution. We
considered the mathematical integral value of the
dumped temperature traces as a feature. The Zynq-
7000 board features a temperature sensor linked to
XADC signals, enabling the monitoring of FPGA
runtime temperature trends. To ensure independent
measurements, we adopted the following procedure:
1. Powering on the board.
2. Loading the bitstream of the desired implementa-
tion after 20 minutes of board activation.
3. Keeping the reset active for 1 minute and then de-
activating it to initiate program execution.
4. Powering off the board and repeating the entire
process after a 30-minute interval upon powering
on the board.
This meticulous approach ensures reliable temper-
ature data, regardless of Vivado tool implementation
positional choices, and facilitates accurate tempera-
ture trend estimation.
4.3 Datasets Generation
We here outline the process of generating datasets for
training and testing our ML models.
4.3.1 Combining Non- and Triggered HTs
Measurements and data collection are done either af-
ter a selected HT has been turned on, i.e., triggered, or
when left inactive, i.e., non-triggered (Critical trojans
cannot be turned off). We include both triggered and
non-triggered HTs in the initial dataset before subse-
quent splits. By including both triggered and non-
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
720

triggered HTs in the initial dataset we provide a more
realistic view over the real data distribution.
4.3.2 Diverse Distribution of HT-free Samples
We offer two dataset options:
• Uniform Distribution (80-20 split): we maintain
an 80-20 random split between train and test sets,
respectively, while ensuring equal class represen-
tation, serving as a performance baseline.
• Realistic Distribution (80-20 split with 50% HT-
free samples in test set): this scenario mirrors
real-world conditions, emphasizing the practical
challenge of distinguishing HTs from HT-free in-
stances.
4.3.3 Exploring Model Robustness
To explore the minimal data requirements for achiev-
ing high accuracy, we conducted a series of experi-
ments where the test set remained fixed (i.e., 20% of
the data), and we progressively reduced the size of the
training set. This process involves sampling a subset
of the training data and training separate models on
these subsets. Through this investigation, we better
understand the models’ robustness and their ability
to maintain accuracy scores, i.e., generalize to new
data, under data scarcity, providing valuable informa-
tion for practical deployment scenarios.
4.4 Model Training
In this sub-section, we delve into our choice of model,
our validation strategy, and our exploration of the im-
pact of input features on model performance.
4.4.1 Selection of XGBoost
For our machine learning framework, we opt for XG-
Boost (Chen et al., 2015), a state-of-the-art model rec-
ognized for its effectiveness in handling tabular data
with relatively limited sample sizes.
4.4.2 Cross-Validation for Robustness
To ensure the robustness and reliability of our cho-
sen model, we employ k-fold cross-validation with k
set to 5 during the training phase on specific datasets.
Cross-validation enhances our confidence in model
performance by evaluating it across multiple folds or
subsets of the dataset. This rigorous validation ap-
proach helps us measure how well the model general-
izes to unseen data, providing a robust assessment of
its capabilities.
4.4.3 Feature Impact Analysis
Understanding the influence of input features on our
model’s performance is essential. To this end, we con-
duct an in-depth analysis of feature impact on HT de-
tection and classification. We explore three distinct
scenarios:
• Both PFs and IFs as inputs: in this configuration,
we leverage both performance features and imple-
mentation features as inputs to the model.
• PFs only: since IFs can be challenging to acquire,
especially when synthesis and implementation re-
ports are unavailable, this scenario isolates the
contribution of performance-related metrics.
• PFs plus one IF: here, we introduce a single im-
plementation feature alongside PFs to investigate
the individual influence of an implementation-
related metric on model performance.
Through these analyses, we gain additional in-
sights into the relative importance of different feature
categories, helping us optimize the model’s perfor-
mance for HT-related tasks.
5 RESULTS AND DISCUSSION
We here present the results of our HT classification
and detection accuracy experiments. The experiments
were conducted with varying training percentages and
dataset compositions, as detailed in the methodology
section.
5.1 HT Classification and Detection
Figure 2a shows the HT accuracy when we systemat-
ically adjusted the training percentage, ranging from
80% down to 8%, while maintaining a fixed 20% test
set size. When the test set featured a uniform class
distribution with 20% HT-free samples, the classifi-
cation accuracy remained consistently high at 100%,
even as the training set size decreased. The detec-
tion accuracy followed a similar pattern, staying at
100% until a training set size of 56%, where it slightly
dropped to 95% but remained robust. However, in
the more realistic scenario with 50% HT-free samples
in the test set, the classification accuracy remained
at 100% with a training set size of 72% and 64%.
The detection accuracy also stayed at 100% for these
configurations. As the training set size reduced fur-
ther, the classification and detection accuracy scores
demonstrated some variation, but the model’s perfor-
mance remained notably strong. These results high-
Machine Learning-Based Classification of Hardware Trojans in FPGAs Implementing RISC-V Cores
721
(a) (b) (c)
Figure 2: HT classification and detection performance of the XGBoost models trained on different datasets. (a) Classification
and detection scores when varying training set size. (b) HT classification accuracy and (c) HT detection accuracy with
different input features and percentages of HT-free samples in the test set.
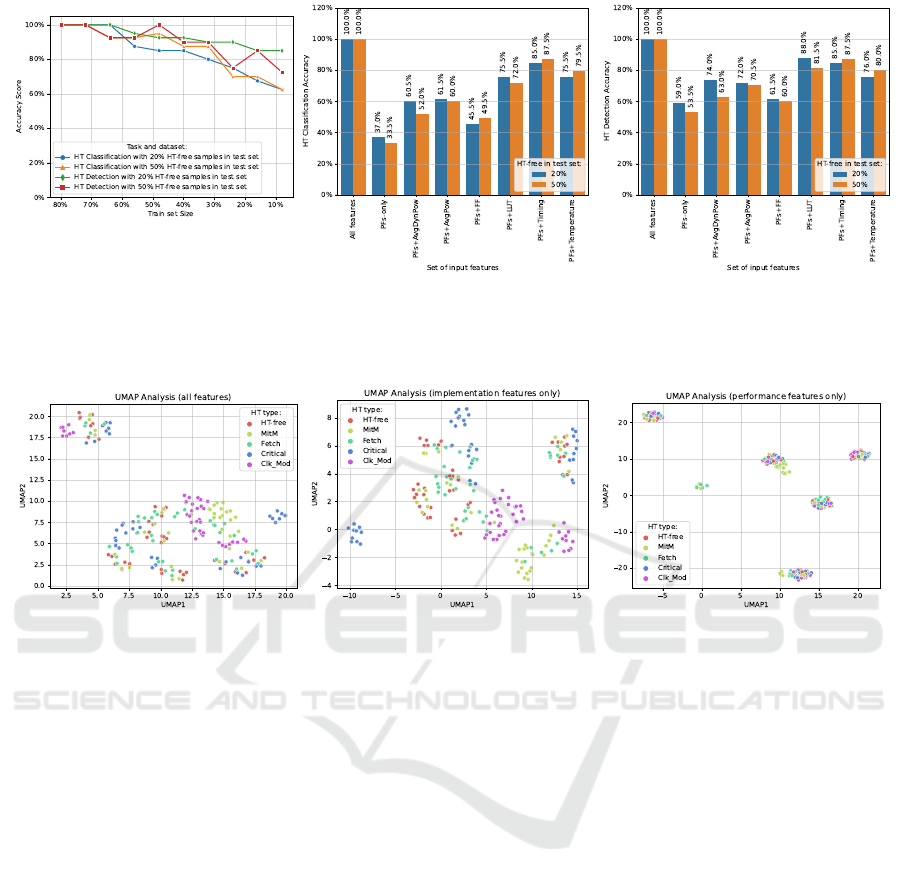
(a) (b) (c)
Figure 3: UMAP plots highlighting input feature distributions. When considering (a) all features or (b) only the implemen-
tation ones, the data points appear spread out and separable. On the other hand, (c) performance features alone are clumped
together in UMAP space, suggesting the need of higher efforts in classifying HT classes.
light the model’s resilience in achieving high accu-
racy even with limited training data.
5.1.1 Performance with Limited Input Features
Figures 2b and 2c report the HT classification and de-
tection accuracy scores with different input features
and diverse percentages of HT-free samples in the test
set (20% or 50%). Firstly, when considering all fea-
tures in the model, regardless of the proportion of
HT-free samples in the test set, the classification and
detection accuracy scores consistently reach 100%.
However, the performance of models relying solely
on PFs exhibits limitations. In scenarios featuring
20% HT-free samples in the test set, PFs-only models
yield relatively lower accuracy scores, with classifica-
tion accuracy dropping to 37% and detection accuracy
to 59% on the uniform test set (33.5% and 53.5% ac-
curacy with 50% HT-free test samples). This suggests
that PFs alone are insufficient for achieving high per-
formance in both classification and detection tasks.
When we augment PFs with one additional feature,
such as the average dynamic power (AvgDynPow),
average total power (AvgTotPow), FFs, LUT, timing,
and temperature, the model’s accuracy scores gener-
ally improve. Notably, models incorporating infor-
mation about timing consistently perform well, with
classification and detection accuracy scores reaching
85% and 100%, respectively, when 50% HT-free sam-
ples are present in the test set. This highlight the sig-
nificance of timing-related features in distinguishing
between HT and HT-free instances.
Overall, our findings highlight the crucial role of
feature selection in HT detection and classification
tasks. While PFs alone may fall short, the inclusion
of timing features proves instrumental in enhancing
the model’s accuracy and effectiveness, especially in
scenarios where HT-free samples are more prevalent.
5.2 Features Importance and
Distribution
The analysis of feature importance in our XG-
Boost model provides an additional understanding
of the discriminative power of different input fea-
tures. When utilizing all input features, IFs emerge
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
722

(a) (b)
Figure 4: Feature importance ranking for XGBoost models trained on different input features. (a) Feature importance scores
for XGBoost trained on all features. (b) Feature importance for XGBoost trained on PFs+LUTs.
as the most influential, with “timing” ranking highest,
achieving a score of approximately 150, followed by
LUTs at around 115, as showed in Figure 4a. How-
ever, if we focus on PFs and LUTs as input features,
for example, as highlighted in Figure 4b, the impor-
tance of LUTs becomes particularly prominent, with
a score of around 450, followed by Cycles at 60. This
shift highlights the significance of LUTs when PFs
are the primary input features.
To reinforce the argument regarding the impor-
tance of IFs, we can employ a Uniform Mani-
fold Approximation and Projection (UMAP) analysis
(McInnes et al., 2018), which helps visualize the dis-
tribution of input features in a reduced-dimensional
space. In Figures 3a and 3b, which consider all fea-
tures or only the implementation ones, respectively,
we can see that data points are well-spread and sep-
arable, illustrating the effectiveness of IFs in feature
discrimination. However, in Figure 3c, where only
PFs are used, data points cluster together in UMAP
space, indicating the need for more substantial efforts
in classifying HT classes when relying solely on PFs.
6 CONCLUSIONS
In this work we provided a comprehensive and de-
tailed methodology for Hardware Trojan (HT) detec-
tion and classification using machine learning. Key
takeaways include the critical role of Implementation
Features (IFs), with timing, i.e., circuit worst negative
slack, as the standout factor, in distinguishing HTs
from HT-free instances. When leveraging all input
features, our XGBoost model consistently achieves
classification and detection accuracy scores of 100%.
However, we showed that using Performance Features
(PFs) alone is insufficient for achieving high accu-
racy, especially with a more realistic test data distribu-
tion. To overcome this, augmenting PFs with at least
one IFs significantly improves model performance.
UMAP analysis visually confirmed the effectiveness
of IFs in feature discrimination. Overall, our findings
emphasize the importance of IFs and the resilience of
XGBoost as a robust HT detection and classification
in integrated circuits.
REFERENCES
Arıkan, K., Palumbo, A., Cassano, L., Reviriego, P.,
Pontarelli, S., Bianchi, G., Ergin, O., and Ottavi, M.
(2022). Processor security: Detecting microarchitec-
tural attacks via count-min sketches. IEEE Transac-
tions on Very Large Scale Integration (VLSI) Systems,
30(7):938–951.
Basak, A., Bhunia, S., Tkacik, T., and Ray, S. (2017). Se-
curity assurance for system-on-chip designs with un-
trusted ips. IEEE Transactions on Information Foren-
sics and Security, 12(7):1515–1528.
Benz, F., Seffrin, A., and Huss, S. A. (2012). Bil: A tool-
chain for bitstream reverse-engineering. In 22nd In-
ternational Conference on Field Programmable Logic
and Applications (FPL), pages 735–738.
Bloom, G., Narahari, B., and Simha, R. (2009). Os support
for detecting trojan circuit attacks. In 2009 IEEE In-
ternational Workshop on Hardware-Oriented Security
and Trust, pages 100–103.
Cassano, L., Mascio, S. D., Palumbo, A., Menicucci, A.,
Furano, G., Bianchi, G., and Ottavi, M. (2022). Is
risc-v ready for space? a security perspective. In
2022 IEEE International Symposium on Defect and
Fault Tolerance in VLSI and Nanotechnology Systems
(DFT), pages 1–6.
Chen, T., He, T., Benesty, M., Khotilovich, V., Tang, Y.,
Cho, H., Chen, K., Mitchell, R., Cano, I., Zhou, T.,
et al. (2015). XGBoost: extreme gradient boosting. R
package version 0.4-2, 1(4):1–4.
Chuan, X., Yan, Y., and Zhang, Y. (2017). An efficient
triggering method of hardware Trojan in AES crypto-
graphic circuit. In Proc. Int. Conf. Integrated Circuits
and Microsystems, pages 91–95.
DIGITIMES (2012). Trends in the global IC design service
market. http://www.digitimes.com/news/a20120313
RS400.html?chid=2.
Machine Learning-Based Classification of Hardware Trojans in FPGAs Implementing RISC-V Cores
723

Domas, C. (2018). Hardware backdoors in x86 cpus.
https://i.blackhat.com/us-18/Thu-August-9/us-18-
Domas-God-Mode-Unlocked-Hardware-Backdoors-
In-x86-CPUs-wp.pdf.
Dong, C., Chen, J., Guo, W., and Zou, J. (2019).
A machine-learning-based hardware-trojan detection
approach for chips in the internet of things. In-
ternational Journal of Distributed Sensor Networks,
15(12):1550147719888098.
Dubeuf, J., H
´
ely, D., and Karri, R. (2013). Run-time de-
tection of hardware trojans: The processor protection
unit. In 2013 18th IEEE European Test Symposium
(ETS), pages 1–6.
Duncan, A., Rahman, F., Lukefahr, A., Farahmandi, F., and
Tehranipoor, M. (2019). Fpga bitstream security: A
day in the life. In 2019 IEEE International Test Con-
ference (ITC), pages 1–10.
Ender, M., Swierczynski, P., Wallat, S., Wilhelm, M.,
Knopp, P. M., and Paar, C. (2019). Insights into the
mind of a trojan designer: the challenge to integrate a
trojan into the bitstream. In Proceedings of the 24th
Asia and South Pacific Design Automation Confer-
ence, pages 112–119.
Huang, Z., Wang, Q., Chen, Y., and Jiang, X. (2020). A
survey on machine learning against hardware trojan
attacks: Recent advances and challenges. IEEE Ac-
cess, 8:10796–10826.
Jin, Y., Maniatakos, M., and Makris, Y. (2012). Exposing
vulnerabilities of untrusted computing platforms. In
Proc. Int. Conf. Computer Design, pages 131–134.
Liu, Y., Zhao, Y., He, J., Liu, A., and Xin, R. (2017). Scca:
Side-channel correlation analysis for detecting hard-
ware trojan. In Proc. Int. Conf. Anti-counterfeiting,
Security, and Identification, pages 196–200.
McInnes, L., Healy, J., and Melville, J. (2018). Umap: Uni-
form manifold approximation and projection for di-
mension reduction. arXiv preprint arXiv:1802.03426.
Nikiema, P. R., Palumbo, A., Aasma, A., Cassano, L., Kri-
tikakou, A., Kulmala, A., Lukkarila, J., Ottavi, M.,
Psiakis, R., and Traiola, M. (2023). Towards depend-
able risc-v cores for edge computing devices. In 2023
IEEE 29th International Symposium on On-Line Test-
ing and Robust System Design (IOLTS), pages 1–7.
Palumbo, A., Cassano, L., Luzzi, B., Hern
´
andez, J. A., Re-
viriego, P., Bianchi, G., and Ottavi, M. (2022). Is your
fpga bitstream hardware trojan-free? machine learn-
ing can provide an answer. Journal of Systems Archi-
tecture, 128:102543.
Palumbo, A., Cassano, L., Reviriego, P., Bianchi, G., and
Ottavi, M. (2021). A lightweight security checking
module to protect microprocessors against hardware
trojan horses. In 2021 IEEE International Symposium
on Defect and Fault Tolerance in VLSI and Nanotech-
nology Systems (DFT), pages 1–6.
Potkonjak, M. (2010). Synthesis of trustable ics using un-
trusted cad tools. In Proceedings of the 47th Design
Automation Conference, pages 633–634.
Rostami, M., Koushanfar, F., Rajendran, J., and Karri, R.
(2013). Hardware security: Threat models and met-
rics. In Proc. Int. Conf. Computer-Aided Design,
pages 819–823.
Roy, J. A., Koushanfar, F., and Markov, I. L. (2008). Ex-
tended abstract: Circuit cad tools as a security threat.
In 2008 IEEE International Workshop on Hardware-
Oriented Security and Trust.
Salmani, H. and Tehranipoor, M. (2012). Layout-aware
switching activity localization to enhance hardware
trojan detection. IEEE Trans. Information Forensics
and Security, 7(1):76–87.
Salmani, H. and Tehranipoor, M. (2013). Analyzing circuit
vulnerability to hardware trojan insertion at the behav-
ioral level. In Proc. Int. Symp. Defect and Fault Tol-
erance in VLSI and Nanotechnology Systems, pages
190–195.
Shakya, B., He, T., Salmani, H., Forte, D., Bhunia, S., and
Tehranipoor, M. (2017). Benchmarking of hardware
trojans and maliciously affected circuits. Journal of
Hardware and Systems Security, 1(1):85–102.
Shila, D. M., Venugopalan, V., and Patterson, C. D. (2015).
Fides: Enhancing trust in reconfigurable based hard-
ware systems. In 2015 IEEE High Performance Ex-
treme Computing Conference (HPEC), pages 1–7.
Sunkavilli, S., Zhang, Z., and Yu, Q. (2021a). Analysis of
attack surfaces and practical attack examples in open
source fpga cad tools. In 2021 22nd International
Symposium on Quality Electronic Design (ISQED),
pages 504–509.
Sunkavilli, S., Zhang, Z., and Yu, Q. (2021b). New security
threats on fpgas: From fpga design tools perspective.
In 2021 IEEE Computer Society Annual Symposium
on VLSI (ISVLSI), pages 278–283.
Tsoutsos, N. G. and Maniatakos, M. (2014). Fabrica-
tion attacks: Zero-overhead malicious modifications
enabling modern microprocessor privilege escalation.
IEEE Trans. Emerging Topics in Computing, 2(1):81–
93.
ˇ
Si
ˇ
sejkovi
´
c, D., Merchant, F., Leupers, R., Ascheid, G., and
Kegreiss, S. (2019). Control-lock: Securing processor
cores against software-controlled hardware trojans. In
Proceedings of the 2019 on Great Lakes Symposium
on VLSI, GLSVLSI ’19, pages 27–32.
Wang, X., Mal-Sarkar, T., Krishna, A., Narasimhan, S., and
Bhunia, S. (2012). Software exploitable hardware tro-
jans in embedded processor. In 2012 IEEE Interna-
tional Symposium on Defect and Fault Tolerance in
VLSI and Nanotechnology Systems (DFT), pages 55–
58. IEEE.
Xiao, K., Nahiyan, A., and Tehranipoor, M. (2016). Secu-
rity rule checking in ic design. Computer, 49(8):54–
61.
Zhang, J. and Qu, G. (2019). Recent attacks and defenses on
fpga-based systems. ACM Transactions on Reconfig-
urable Technology and Systems (TRETS), 12(3):1–24.
Zhang, J., Yuan, F., Wei, L., Liu, Y., and Xu, Q. (2015).
Veritrust: Verification for hardware trust. IEEE Trans.
Computer-Aided Design of Integrated Circuits and
Systems, 34(7):1148–1161.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
724
