
Federated Learning with Differential Privacy and an Untrusted
Aggregator
Kunlong Liu and Trinabh Gupta
University of California, Santa Barbara, U.S.A.
Keywords:
Federated Learning, Secure Multi-Party Computation, Homomorphic Encryption.
Abstract:
Federated learning for training models over mobile devices is gaining popularity. Current systems for this task
exhibit significant trade-offs between model accuracy, privacy guarantee, and device efficiency. For instance,
Oort (OSDI 2021) provides excellent accuracy and efficiency but requires a trusted central server. On the
other hand, Orchard (OSDI 2020) provides good accuracy and the differential privacy guarantee without a
trusted server, but creates high overhead for the devices. This paper describes Aero, a new federated learning
system that significantly improves this trade-off. Aero guarantees good accuracy, differential privacy without
a trusted server, and low device overhead. The key idea of Aero is to tune system architecture and design to
a specific federated learning algorithm. This tuning requires novel optimizations and techniques, including a
new protocol to securely aggregate gradient updates from devices. An evaluation of Aero demonstrates that
it provides comparable accuracy to plain federated learning (without differential privacy), and it improves
efficiency (CPU and network) over Orchard by a factor of 10
5
.
1 INTRODUCTION
Federated learning (FL) is a recent paradigm in ma-
chine learning that embraces a decentralized training
architecture (McMahan et al., 2017). In contrast to
the central model of learning where users ship their
training data to a central server, users in FL download
the latest model parameters from a server, perform lo-
cal training to generate updates to the parameters, and
send these updates to the server. Federated learning
has gained popularity for mobiles as it can save net-
work bandwidth and it is privacy-friendly—raw data
stays at the devices.
Current systems for federated learning exhibit sig-
nificant trade-offs between model accuracy, privacy,
and device efficiency. For instance, one class of sys-
tems that includes FedScale (Lai et al., 2022) provides
excellent accuracy (comparable to centralized learn-
ing) and device efficiency. But these systems pro-
vide only a weak notion of privacy. Specifically, even
though devices ship updates rather than the raw train-
ing data (user images, text messages, search queries,
etc.) to a central server, these updates can be reverse-
engineered to reveal the raw data (Zhu et al., 2019;
Melis et al., 2019). Thus, the compromise of a single
server can reveal users’ data.
On the other hand, systems such as Orchard (Roth
et al., 2020) offer good accuracy and the rigorous
differential privacy guarantee (Dwork, 2011; Dwork
et al., 2006) for users’ data. In fact, Orchard guar-
antees differential privacy while assuming that the
server is byzantine, using techniques from cryptog-
raphy. But the downside is the high overhead for the
devices. For example, to train a convolutional neural
network (CNN) with 1.2 million parameters (Reddi
et al., 2020), Orchard requires from each device ≈14
minutes of training time on a six-core processor and
≈840 MiB in network transfers per round of train-
ing (§6.2). The full training requires a few hundred
rounds. Furthermore, for a few randomly chosen de-
vices, this per-round cost spikes to ≈214 hours of CPU
time and ≈11 TiB of network transfers.
This paper describes a new federated learning sys-
tem, Aero, that significantly improves the tradeoff be-
tween accuracy, privacy, and device overhead. Aero
provides good accuracy, the differential privacy guar-
antee in the same byzantine threat model as Orchard,
and low device overhead. For instance, most of the
time Aero’s devices incur overhead in milliseconds of
CPU time and KiBs of network transfers.
The key idea in Aero is that it does not aim
to be a general-purpose federated learning system,
rather focuses on a particular algorithm called DP-
FedAvg (McMahan et al., 2018) (§3.1). This algo-
rithm samples devices that contribute updates in a
round using a simple probability parameter (e.g., a
device is selected with a probability of 10
−5
), then
aggregates updates across devices by averaging them,
Liu, K. and Gupta, T.
Federated Learning with Differential Privacy and an Untrusted Aggregator.
DOI: 10.5220/0012322100003648
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Information Systems Security and Privacy (ICISSP 2024), pages 379-389
ISBN: 978-989-758-683-5; ISSN: 2184-4356
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
379

and generates noise needed for differential privacy
from a Gaussian distribution. Aero tunes system ar-
chitecture and design to this algorithm, thereby gain-
ing on performance by orders of magnitude.
We implemented Aero by extending the FedScale
FL system (Lai et al., 2022) (§5). FedScale supports
plain federated learning without differential privacy
or protection against a byzantine server. However,
we choose it as it is flexible, allows a programmer
to specify models in the PyTorch framework, and in-
cludes a variety of models and datasets with a vary-
ing number of parameters for performance evaluation.
Our evaluation of Aero’s prototype (§6) shows that
Aero trains models with comparable accuracy to Fed-
Scale, in particular, the plain FedAvg algorithm in
FedScale (§6.1). Aero also improves overhead rel-
ative to Orchard by up to five orders of magnitude.
For instance, for a 1.2M parameter CNN on the FEM-
NIST dataset (Reddi et al., 2020), and for a total pop-
ulation of 10
9
devices where 10
4
contribute updates
per round, an Aero device requires 15 ms of CPU time
and 3.12 KiB of network transfers per round. Occa-
sionally (with a probability of 10
−5
in a round) this
overhead increases (e.g., when a device contributes
updates) to 13.4 minutes of latency on a six-core pro-
cessor and 234 MiB in network transfers.
2 PROBLEM AND BACKGROUND
This section outlines the problem and gives a short
background on Orchard (Roth et al., 2020) that forms
both a baseline and an inspiration for Aero.
2.1 Scenario and Threat Model
We consider a scenario consisting of a data analyst
and a large number of mobile devices, e.g., hundreds
of million. The analyst is interested in learning a ma-
chine learning model over the data on the devices. For
instance, the analyst may want to train a recurrent
neural network (RNN) to provide auto-completion
suggestions for the android keyboard (Hard et al.,
2018).
One restriction we place on this scenario is that
the training must be done in a federated manner.
As noted earlier (§1), federated learning proceeds in
rounds, where in each round devices download the lat-
est model parameters from a server, generate updates
to these parameters locally, and send the updates to
the server. The server aggregates the model updates.
This repeats until the model achieves a target accu-
racy.
In this scenario, a malicious server, or even a mali-
cious device, can execute many attacks. For instance,
a malicious server can infer the training data of a de-
vice from the updates contributed by the device (Zhu
et al., 2019; Melis et al., 2019). Similarly, a malicious
device that receives model parameters from the server
can reverse-engineer the model parameters, and learn
another device’s training input.
We assume the same threat model as Orchard:
OB+MC. The server is honest-but-curious most of the
time but occasionally byzantine (OB), while the de-
vices are mostly correct (MC), but a small fraction
can be malicious. The rationale behind this model
is that the server’s operator, e.g., Google, is reputed
and subject to significant scrutiny from the press and
the users, and thus unlikely to be byzantine for long.
However, it may occasionally come under attack, e.g.,
from a rogue employee. Meanwhile, with billions of
devices, even a small fraction is significant, and un-
likely to be under adversary’s control. For instance,
3% of a billion devices is already significantly larger
than a large botnet.
2.2 Goals
Under the OB+MC threat model, we want our system
to meet the following goals.
Privacy (Always). It must guarantee the gold stan-
dard definition of privacy, i.e., differential privacy
(DP) (Dwork, 2011; Dwork et al., 2006; Dwork et al.,
2014; Abadi et al., 2016), even when the server is
byzantine. Informally, a system offers DP for model
training if the probability of learning a particular set
of model parameters is (approximately) independent
of whether a device’s training data is included. This
means that DP prevents inference attacks where a par-
ticular device’s input is revealed, as models are (ap-
proximately) independent of a device’s input.
Accuracy (Conditional). During periods when the
server or the devices that contribute in a round are
not byzantine, the system must produce models with
accuracy comparable to models trained via plain fed-
erated learning. That is, we want the impact of differ-
ential privacy to be low.
Efficiency and Scalability (Always). We want the
system to support models with a large number of pa-
rameters while imposing a low to moderate device-
side overhead. For the former, a reference point is the
android keyboard auto-completion model (an RNN)
with 1.4M parameters (Hard et al., 2018). For the
device overhead, if a device participates regularly in
training, e.g., in every round, then it should incur no
more than a few seconds of CPU and a few MiBs in
network transfers per round. However, we assume
that devices can tolerate occasional amounts of addi-
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
380

MAIN:
1: parameters
2: device selection probability q ∈ (0, 1]
3: DP noise scale z
4: total # of devices W
5: clipping bound on device updates S
6: Initialize model θ
0
, DP budget accountant M
7: for each round t = 0, 1, 2, ... do
8: C
t
← (sample users with probability q)
9: for each user k ∈ C
t
do
10: ∆
t
k
← USERUPDATE(k, θ
t
, S )
11: // Add updates and Gaussian DP noise
12: ∆
t
←
∑
k
∆
t
k
+ N (0, I σ
2
)
13: θ
t +1
← θ
t
+ (∆
t
/(qW )) // Update model
14: Update M based on z and q
USERUPDATE(k, θ
0
, S )
15: parameters B, E , η // η is learning rate
16: θ ← θ
0
17: for each local epoch i in 1 to E do
18: B ← (k’s data split into size B batches)
19: for batch b ∈ B do
20: θ ← θ − η∇ℓ(θ ; b) // ℓ is loss fn.
21: θ ← θ
0
+ Clip(θ −θ
0
, S )
22: return ∆
k
= θ − θ
0
// Already clipped
Figure 1: Pseudocode for the DP-FedAvg algorithm.
Clip(·, S ) scales its input vector such that its norm (Eu-
clidean distance from the origin) is less than S . M is the
privacy budget accountant of Abadi et al. (Abadi et al.,
2016) that tracks the values of the DP parameters ε and δ.
tional work, contributing tens of minutes of CPU and
a few hundred MiBs in network transfers.
3 OVERVIEW OF AERO
Aero focuses on a specific federated learning algo-
rithm called DP-FedAvg (McMahan et al., 2018). We
briefly explain how DP-FedAvg works and then give
an overview of Aero.
3.1 DP-FedAvg Without Amplification
DP-FedAvg proceeds in discrete rounds (Figure 1). In
each round t, it samples a small subset of user devices
using a probability parameter q (line 8), and asks
the sampled devices to provide updates to the global
model parameters (line 10). The devices locally gen-
erate the updates before clipping them by a value
S and uploading them (line 21); DP-FedAvg then
aggregates these updates (line 12) and (separately)
adds noise sampled from a Gaussian distribution. Fi-
nally, DP-FedAvg updates a privacy accountant M
that computes, based on the noise scale z and sam-
pling probability q, two parameters ε and δ associ-
ated with differential privacy (line 14). These param-
eters capture the strength of the guarantee: how much
the model parameters learned after a round varies de-
pending on a device’s input.
Aero is tailored to three characteristics of DP-
FedAvg. The first is the sampling of devices. The
second characteristic is that the noise is sampled from
a Gaussian distribution whose standard deviation σ
is predetermined (set before the algorithm is run).
The third characteristic is averaging of updates: DP-
FedAvg sums updates with noise rather than combin-
ing them using a more complex function.
Finally, we remark that Aero can support DP-
FedAvg only without the amplification assumption
for DP. This is because the adversary (the byzan-
tine server) can observe all traffic and knows which
devices contribute updates for training. In contrast,
the amplification assumption requires the server to
be oblivious to the contributors, which in turn im-
proves the privacy budget. We leave the addition of
expensive oblivious approaches (which hide who is
contributing updates besides hiding the updates them-
selves) to future work.
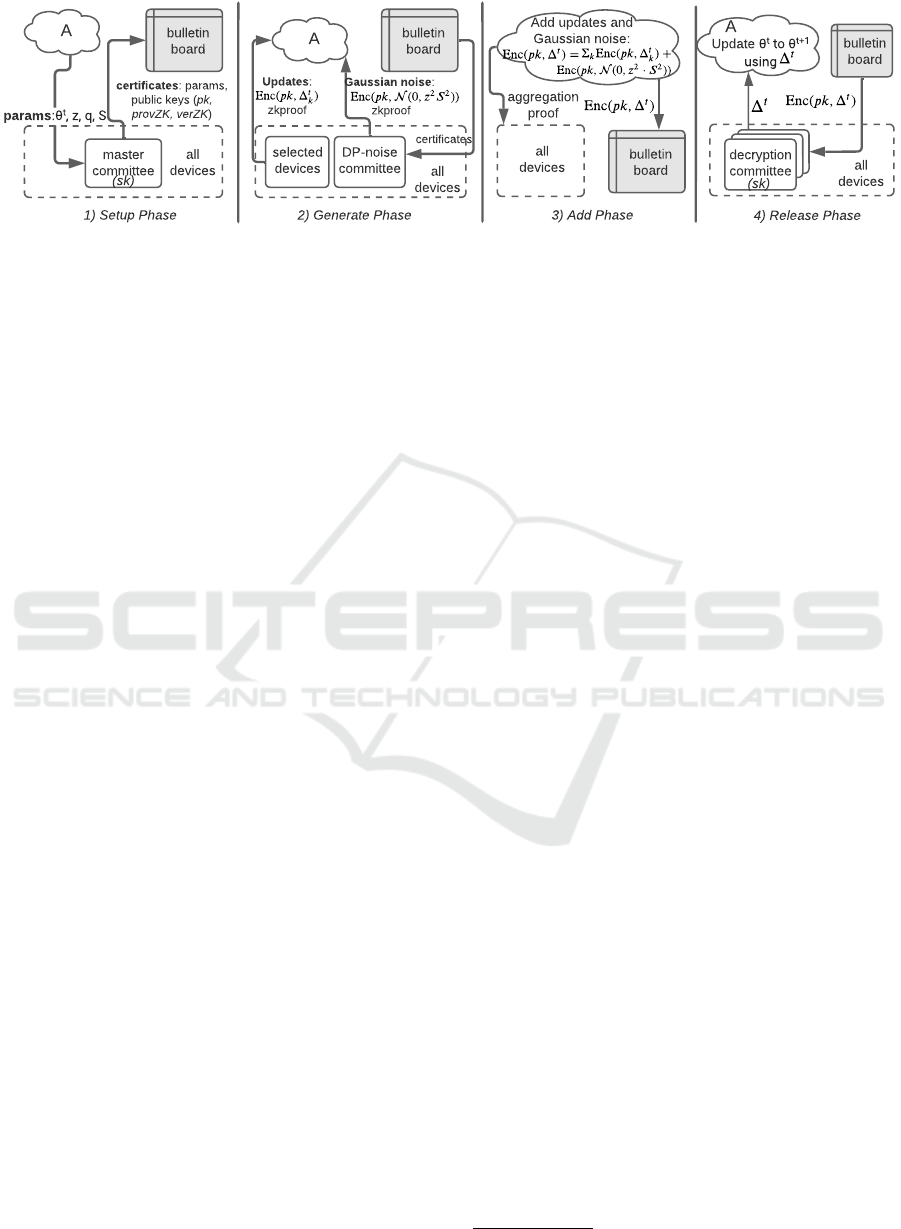
3.2 Architecture of Aero
Aero borrows two system components from Orchard:
an aggregator and a public bulletin board (Figure 2).
The aggregator runs server-side inside a data center
and therefore consists of one or more powerful ma-
chines. Its main role is to combine updates from user
devices without learning their content. The bulletin
board is an immutable append-only log. The aggre-
gator (which is potentially malicious) and the devices
use the bulletin board to reliably broadcast messages
and store state across rounds, e.g., the latest values of
DP parameters ε and δ. Like Orchard, Aero assumes
that free web services such as Wikipedia, or a public
block-chain could serve as the bulletin board.
Like Orchard, Aero also consists of committees of
devices, that is, randomly sampled subsets of devices.
But instead of a single committee in Orchard, Aero
has three types of committees tailored to the needs
of DP-FedAvg. A master committee handles sys-
tem setup, including key generation for cryptographic
primitives. A DP-noise committee handles Gaussian
noise generation. And multiple decryption commit-
tees perform decryption operations to release aggre-
gated updates to the global model parameters at the
end of a training round. Aero samples each committee
afresh each round, dividing the committee workload
across the large population of devices.
An architecture with separate committee types is
deliberate and crucial. It helps tailor a committee’s
Federated Learning with Differential Privacy and an Untrusted Aggregator
381
A
Update ?
t
to ?
t+1
using
1) Setup Phase
A
master
committee
params:?
t
, z, q, S
bulletin
board
2) Generate Phase
DP-noise
committee
selected
devices
3) Add Phase
4) Release Phase
decryption
committee
certificates: params,
public keys (pk,
provZK, verZK)
all
devices
all
devices
A
bulletin
board
Updates:
zkproof
Gaussian noise:
zkproof
all
devices
bulletin
board
aggregation
proof
Add updates and
Gaussian noise:
bulletin
board
all
devices
certificates
(sk)
(sk)
Figure 2: An overview of Aero’s architecture and the four phases of its protocol.
protocol to its tasks to significantly improve effi-
ciency. Besides, the use of multiple committees of
the same type, i.e., multiple decryption committees,
helps Aero scale with model size as each committee
works on a subset of model parameters.
3.3 Protocol Overview of Aero
To begin training a model, a data analyst supplies
input parameters (the model architecture, the initial
model parameters, and parameters for DP-FedAvg)
to the aggregator. The aggregator then initiates a
round-based protocol consisting of discrete rounds.
In each round, it executes one iteration of the for loop
in the MAIN procedure of DP-FedAvg (line 7 in Fig-
ure 1). Each round further consists of the four phases
of setup, generate, add, and release (Figure 2).
In the setup phase, the aggregator samples the
various committees for the round. The master com-
mittee then receives and validates the input parame-
ters, and generates keys for an additively homomor-
phic encryption (AHE) and a zero-knowledge (ZK)
proof scheme. Aero’s setup phase is similar to Or-
chard with the difference that Aero’s master commit-
tee uses techniques to reuse keys across rounds rather
than generating them fresh for each round.
Next, in the generate phase, (i) devices select
themselves to generate updates for the round, and (ii)
the DP-noise committee generates the Gaussian noise
for DP. Both types of devices use novel techniques to
perform their work efficiently. For instance, the DP-
noise committee generates noise in an efficient, dis-
tributed manner.
Next, in the add phase, the aggregator adds the
model updates to the Gaussian noise without learning
the plaintext content of either of them. This is done
through the use of the AHE scheme. Since the aggre-
gator can be malicious, the entire population of de-
vices collectively verifies the aggregator’s work. The
key point again is the efficiency for the devices, for
which the aggregator and the devices use a new veri-
fiable, secure aggregation protocol.
Finally, in the release phase, each decryption com-
mittee receives the secret key for the AHE scheme
from the master committee and decrypts a few AHE
ciphertexts from the add phase. The key point here
is that a decryption committee avoids expensive,
general-purpose cryptographic protocols to do the de-
cryption.
4 DESIGN OF AERO
We now go over the design details of Aero phase-by-
phase and we refer the readers to a technical report
1
for the detailed protocol description. The main chal-
lenge in each phase is keeping the device overhead
low while protecting against the malicious aggregator
and the malicious fraction of devices. We highlight
these challenges, and Aero’s key design choices and
techniques.
But before proceeding, we briefly discuss commit-
tee formation, which is common to multiple phases.
To form committees of randomly sampled devices,
Aero uses the sortition protocol from Orchard. An im-
portant aspect of committee formation is committee
size and the number of malicious devices in a commit-
tee: provision of a larger number of malicious devices
A relative to the committee size C increases costs but
ensures higher resiliency. Like Orchard, Aero makes
a probabilistic argument (Roth et al., 2019) to select
C and A such that the probability of the number of
malicious devices exceeding A is small.
4.1 Setup Phase
Much of Aero’s setup phase is similar to Orchard.
During this phase, (i) the aggregator samples the mas-
ter committee, which then (ii) receives inputs for the
round (i.e., receives model parameters θ
t
for the cur-
rent round t, the device selection probability q, noise
scale z , and clipping bound S), (iii) generates new
values of the DP parameters ε,δ, and (iv) generates
keys for cryptographic primitives (§3.3). We do not
1
https://arxiv.org/abs/2312.10789
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
382

focus on the first three pieces as they are the same as
in Orchard. Instead, the key challenge in Aero is the
overhead of key generation.
Orchard uses secure multi-party computation
(MPC) among the master committee members to cor-
rectly run the key generation function and ensure that
even if the malicious members of the committee col-
lude, they cannot recover the AHE secret key. The
overhead of this MPC is high: ≈1 GiB of network
transfers and 180 seconds of CPU time per committee
device.
To reduce the overhead, one idea (Roth et al.,
2021) is to reuse keys across rounds rather than gen-
erate them afresh for each round. But one has to be
careful.
Consider the following attack. Say that the ma-
licious aggregator receives a victim device k
′
s up-
date Enc(pk,∆
t
k
) in round t ; here Enc is the AHE
scheme. Then, in the next round t + 1, the aggregator
colludes with a malicious device in the overall pop-
ulation to use Enc(pk ,∆
t
k
) as the malicious device’s
update. This attack enables the aggregator to violate
differential privacy as the victim device’s input does
not satisfy the required clipping bound S in round
t + 1 due to its multiple copies (§3.1). Orchard does
not suffer from this attack as it generates fresh keys
in each round: the ciphertext for round t decrypts to
a random message with round t + 1’s key. However,
prior work that reuses keys in this manner (Roth et al.,
2021) has this vulnerability.
Thus, Aero must apply the reuse-of-keys idea with
care. Aero adjusts the generate and add phases of
its protocol (§3.3) to prevent the aforementioned at-
tack. We are not in a position yet to describe these
changes, but we will detail them shortly when we de-
scribe these other phases (§4.2, §4.3).
Meanwhile, the changes in the setup phase relative
to Orchard are the following: for the AHE secret key
sk, Aero implements an efficient verifiable secret re-
distribution scheme (Gupta and Gopinath, 2006; Roth
et al., 2021) such that committee members at round
t + 1 securely obtain the relevant secret (re)-shares of
the key from the committee at round t. For the public
keys (AHE public key pk, and both the ZK-proof pub-
lic proving and verification keys), the committee for
round t signs a certificate containing these keys and
uploads it to the bulletin board, and the committee for
round t + 1 downloads it from the board.
4.2 Generate Phase
Recall from §3.3 that during this phase (i) Aero must
pick a subset of devices to generate updates to the
model parameters, (ii) the DP-noise committee must
generate Gaussian noise for differential privacy, and
(iii) both types of devices must encrypt their gener-
ated data (updates and noise) using AHE.
Device Sampling for Updates. Aero adopts a hybrid
and efficient design in which devices sample them-
selves but the aggregator verifies the sampling. Let
B
t
be a publicly verifiable source of randomness for
round t; this is the same randomness that is used in
the sortition protocol to sample committees for the
round. Then, each device k with public key π
k
com-
putes PRG(π
k
||B
t
), where PRG is a pseudorandom
generator. Next, the device scales the PRG output to a
value between 0 and 1, and checks if the result is less
than q. If selected, the device runs the USERUPDATE
procedure (line 10 in Figure 1) to generate updates
for the round. This approach of sampling is efficient
as devices perform only local computations.
Gaussian Noise Generation. The default option is to
make the DP-noise committee generate the noise us-
ing a secure computation MPC protocol, but as noted
earlier in this paper, this option is expensive. Instead,
Aero adapts prior work (Truex et al., 2019) on dis-
tributed Gaussian noise generation. Aero asks each
honest device to sample its noise share from the dis-
tribution N (0,I
σ
2
C −A
). Since there will be at least
C − A honest devices in the committee, the sum of
noise shares is at least N (0, I σ
2
).
Encryption and ZK-Proofs. Once the devices gen-
erate their updates or shares of the Gaussian noise,
they encrypt the content using the public key of the
AHE scheme to prevent the aggregator from learning
the content. Further, they certify using a ZK-proof
scheme that the encryption is done correctly and the
data being encrypted is bounded by the clipping value
S (so that malicious devices may not supply arbitrary
updates). This encryption and ZK-proof generation
is same as in Orchard, but Aero requires additional
changes. Recall from the setup phase that Aero must
ensure a ciphertext generated in a round is used only
in that round, to prevent complications due to reuse
of keys (§4.1). To do this, each device concatenates
the round number t (as a timestamp) to the plaintext
message before encrypting it. Further, the ZK-proof
includes a check that proves that a prefix of the plain-
text message equals the current round number.
4.3 Add Phase
Recall that during the add phase (i) the aggregator
adds ciphertexts containing device updates to those
containing shares of Gaussian noise, (ii) the devices
collectively verify the aggregator’s addition (§3.3).
This work during the add phase has subtle require-
Federated Learning with Differential Privacy and an Untrusted Aggregator
383

ments. So first, we expand on these requirements
while considering a toy example with two honest and
a malicious device. The first honest device’s input
is ENC(pk,∆), where ∆ is its update, while the sec-
ond honest device’s input is ENC(pk,n), where n is
the Gaussian noise. For this toy example, first (R1),
the aggregator must not omit ENC(pk , n) from the
aggregate as the added noise would then be insuffi-
cient to protect ∆ and guarantee DP. Second (R2),
the aggregator must not let the malicious device use
ENC(pk,∆) as its input. Relatedly, the aggregator it-
self must not modify ENC(pk,∆) to ENC(pk,k · ∆),
where k is a scalar, using the homomorphic proper-
ties of the encryption scheme. The reason is that these
changes can violate the clipping requirement that a
device’s input is bounded by S (e.g., 2 · ∆ may be
larger than S ). And, third (R3), the aggregator must
ensure that the above (the malicious device or the ag-
gregator copying a device’s input) does not happen
across rounds, as Aero uses the same encryption key
in multiple rounds (§4.1).
One option to satisfy these requirements is to use
the verifiable aggregation protocol of Orchard (Roth
et al., 2019) that is based on summation trees. The
main challenge is resource costs. Briefly, in this
protocol, the aggregator arranges the ciphertexts to
be aggregated as leaf nodes of a tree, and pub-
lishes the nodes of the tree leading to the root node.
For example, the leaf nodes will be ENC(pk,∆) and
ENC(pk,n), and the root node will be ENC(pk ,∆) +
ENC(pk,n), for the toy example above. Then, de-
vices in the entire population inspect parts of this
tree: download a few children and their parents and
check that the addition is done correctly, that the leaf
nodes haven’t been modified by the aggregator, and
the leaf nodes that should be included are indeed in-
cluded. The problem is that Orchard requires a de-
vice to download and check about 3 · s nodes of the
tree, where s is a configurable parameter whose de-
fault value is six. For large models, each node is
made of many ciphertexts (e.g., the 1.2M parame-
ter CNN model requires ℓ = 293 ciphertexts), and 18
such nodes add to 738 MiB. Thus, Aero improves this
protocol using two ideas.
Incorporating Finer-Grained Summation Trees.
Aero observes that the entire population of devices
that must collectively check the tree is massive (e.g.,
10
9
). Besides, although the tree has bulky nodes
with many ciphertexts, the total number of nodes is
not high due to sampling (e.g., only 10,000 devices
contribute updates in a round). Thus, Aero moves
away from one summation tree with “bulky” nodes,
to ℓ summation trees with “small” nodes, where ℓ is
the number of ciphertexts comprising a device’s up-
date (e.g., ℓ = 293 for the 1.2M parameter model).
Then, each device probabilistically selects a handful
of trees, and checks a few nodes within each selected
tree. With this optimization, the verification work can
be divided among more devices compared with Or-
chard.
Incorporating PIT. Checking the non-leaf vertices is
a main source of overhead for the protocol above. The
reason is that even though each non-leaf is a single
ciphertext, this ciphertext is large: for the quantum-
secure AHE scheme Aero uses (§5), a ciphertext is
131 KiB.
Aero reduces this overhead by using polynomial
identity testing (PIT) (Schwartz, 1980; Zippel, 1979).
This test says that given a d -degree polynomial g(x )
whose coefficients are in a field F, one can test
whether g(x ) is a zero polynomial by picking a num-
ber r ∈ F uniformly and testing whether g(r) == 0.
This works because a d-degree polynomial has at
most d solutions to g(x ) == 0 and d is much less
than |F|.
Using PIT, Aero replaces the ciphertexts at the
non-leafs with their evaluations at a random point
r. Then, during the “Verify” step, a device checks
whether these evaluations (rather than ciphertexts)
add up. Thus, instead of downloading three quantum-
secure ciphertexts with 2 · 2
12
field elements each, a
device downloads 2 elements of F per ciphertext.
A requirement for PIT is generation of r , which
must be sampled uniformly from the coefficient field.
For this task, Aero extends the master committee to
publish an r to the bulletin board in the add step, using
a known protocol to securely and efficiently generate
a random number (Damg
˚
ard et al., 2012).
4.4 Release Phase
During the release phase, Aero must decrypt the ℓ ci-
phertexts from the add phase, i.e., the ℓ root nodes of
the ℓ summation trees. The default, but expensive, op-
tion is to use MPC among the members of the decryp-
tion committees. Aero addresses this efficiency chal-
lenge using known ideas and applying them. Aero
uses multiple decryption committees (§3.2) and re-
duces each committee’s work relative to the MPC
baseline, using a fast distributed decryption protocol
to decrypt the ciphertexts (Chen et al., 2019). The use
of this protocol is possible as a decryption commit-
tee’s task is only decryption given how Aero assigns
work to different types of committees (§3.2).
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
384

Dataset Model Params. FedScale Aero
FEMNIST LeNet 49K 75% 74%
CNND 1.2M 78% 68%
CNNF 1.7M 79% 68%
AlexNet 3.9M 78% 40%
CIFAR10 LeNet 62K 48% 48%
ResNet20 272K 59% 48%
ResNet56 855K 54% 35%
Speech MobileNetV2 2M 57% 4%
Figure 3: Test accuracy for different models after 480
rounds of training and differential privacy parameters (ε, δ)
set to (5.04, W
−1.1
). As shown later, increasing ε can re-
cover the accuracy loss.
5 PROTOTYPE
IMPLEMENTATION
We implemented a prototype of Aero
2
atop Fed-
Scale (Lai et al., 2022), which is a scalable system for
federated learning capable of handling a large num-
ber of devices. By default, FedScale supports algo-
rithms such as FedAvg (without differential privacy).
Besides, it allows a data analyst to specify the model
using the popular PyTorch framework.
Our Aero prototype first extends FedScale by
extending the programming layer of FedScale with
Opacus (Yousefpour et al., 2021), which is a li-
brary that adjusts a PyTorch model to make it suit-
able for differential privacy. Our prototype then ex-
tends the device-side and server-side code with Aero’s
corresponding components. Our prototype config-
ures the cryptographic primitives for 128-bit security.
For AHE, we use the BFV encryption scheme (Fan
and Vercauteren, 2012). For ZK-proofs, we use
Groth16 (Groth, 2016).
6 EVALUATION
We evaluate Aero in two parts. First, we compare it
with plain federated learning, specifically, the Fed-
Scale system. This comparison sheds light on the
cost of privacy in terms of model accuracy. Second,
we compare Aero to Orchard, which is the state-of-
the-art system for training models in a federated man-
ner in the same threat model as Aero. This compari-
son helps understand the effectiveness of Aero’s tech-
niques in reducing overhead.
Testbed. Our testbed has machines of type
c5.24xlarge on Amazon EC2. Each machine has
96vCPUs, 192 GiB RAM, and 25 Gbps network band-
width. We use a single machine for running Aero’s
2
https://github.com/lonhuen/aero
server. We use multiple machines to run each commit-
tee, where each device is assigned six CPUs given that
modern mobiles have processors with four to eight
CPUs. We also run a few “generator” and “verifier”
devices that generate parameter updates and verify ag-
gregation, to measure these devices’ overhead.
Default System Configuration. Unless specified
otherwise, we configure the systems to assume W =
10
9
total devices. For Aero, we set the default de-
vice sampling probability q in DP-FedAvg to 10
−5
;
i.e., the expected number of devices that contribute
updates in a round is 10
4
. We also configure Aero to
use ten decryption committees, where each commit-
tee has a total of C = 45 devices of which A = 18
may be malicious. The first decryption committee
also serves as the master committee. We configure the
DP-noise committee with (A,C ) = (40,280). For Or-
chard, we configure its committee to have 40 devices
of which 16 may be malicious.
3
6.1 Comparison with FedScale
We evaluate several datasets and models to compare
Aero with FedScale (Figure 3). We use CNND and
CNNF for two different CNN models: one dropout
model (Reddi et al., 2020) and the other from the Fe-
dAvg paper (McMahan et al., 2017). Aero’s accu-
racy depends on the DP parameters ε and δ. For Fig-
ure 3 experiments, we set ε = 5.04 and δ = 1/W
1.1
.
For both systems, we set all other training parame-
ters (batch size, the number of device-side training
epochs, etc.) per the examples provided by FedScale
for each dataset.
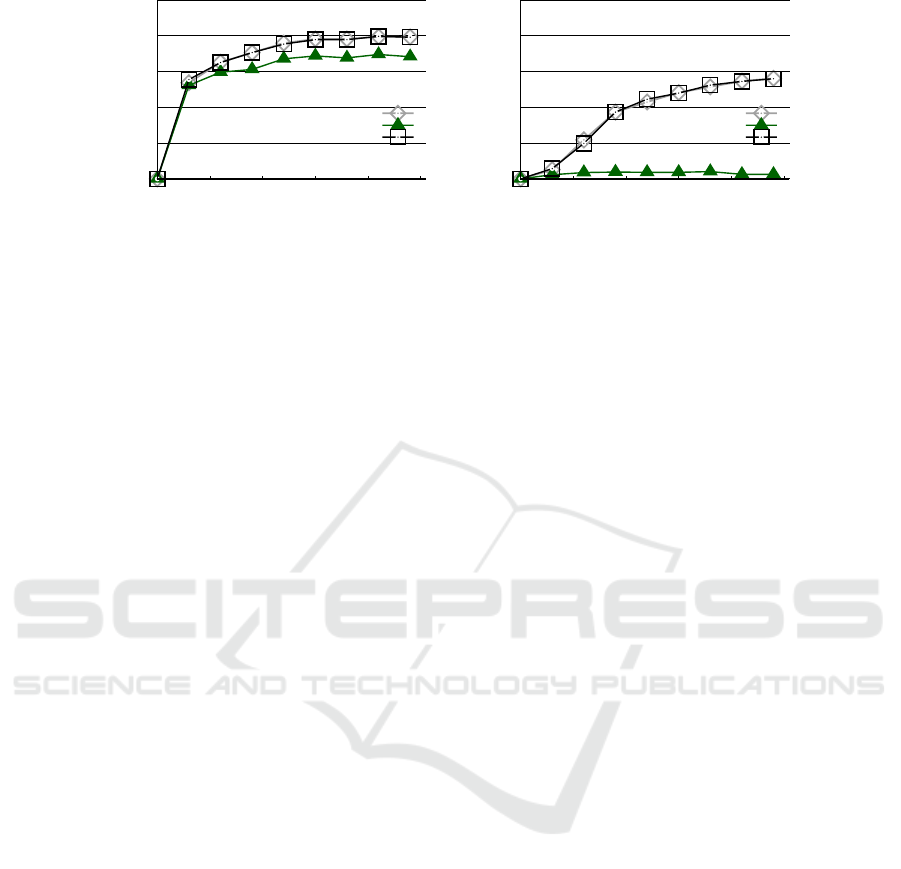
Figure 3 compares the accuracies after 480 rounds
of training (these models converge in roughly 400-
500 rounds). Generally, Aero’s accuracy loss grows
with the number of model parameters. The reason is
that DP-FedAvg adds noise for every parameter and
thus the norm of the noise increases with the number
of parameters.
Although Aero’s accuracy loss is (very) high for a
larger number of parameters, this loss is recoverable
by increasing ε. Figure 4 shows accuracy for two val-
ues of ε for two example models. Increasing ε from
5.04 to 5.53 recovers the accuracy loss. For instance,
for the CNNF model, FedScale’s accuracy is 79.3%
after 480 rounds, while Aero’s is 79.2%. The reason
is that as ε increases, more devices can contribute up-
dates (q increases), which increases the signal relative
to the differential privacy noise. Overall, Aero can
give competitive accuracy as plain federated learning
3
Aero’s committees are larger because it must ensure
that the chance of sampling more than A malicious devices
across any of its committees is the same as in Orchard.
Federated Learning with Differential Privacy and an Untrusted Aggregator
385
0%
20%
40%
60%
80%
100%
0 100 200 300 400 500
Test Accuracy
Rounds
FedScale (No DP)
Aero, epsilon=5.04
Aero, epsilon=5.53
(a) CNNF
0%
20%
40%
60%
80%
100%
0 100 200 300 400 500
Test Accuracy
Rounds
FedScale (No DP)
Aero, epsilon=5.04
Aero, epsilon=5.53
(b) MobileNetV2
Figure 4: Test accuracy versus rounds for Aero and FedScale for the 1.7M parameter CNNF model and the 2M parameter
MobileNetV2 model.
for models with parameters ranging from tens of thou-
sand to a few million.
6.2 Comparison to Orchard
Both Aero and Orchard have multiple types of de-
vices. Aero has devices that participate in the mas-
ter committee, generate updates (or Gaussian noise),
verify the aggregator’s work, and participate in the
decryption committee. Similarly, Orchard has gen-
erator, verifier, and committee devices (Orchard has
a single committee). We compare overhead for these
devices separately.
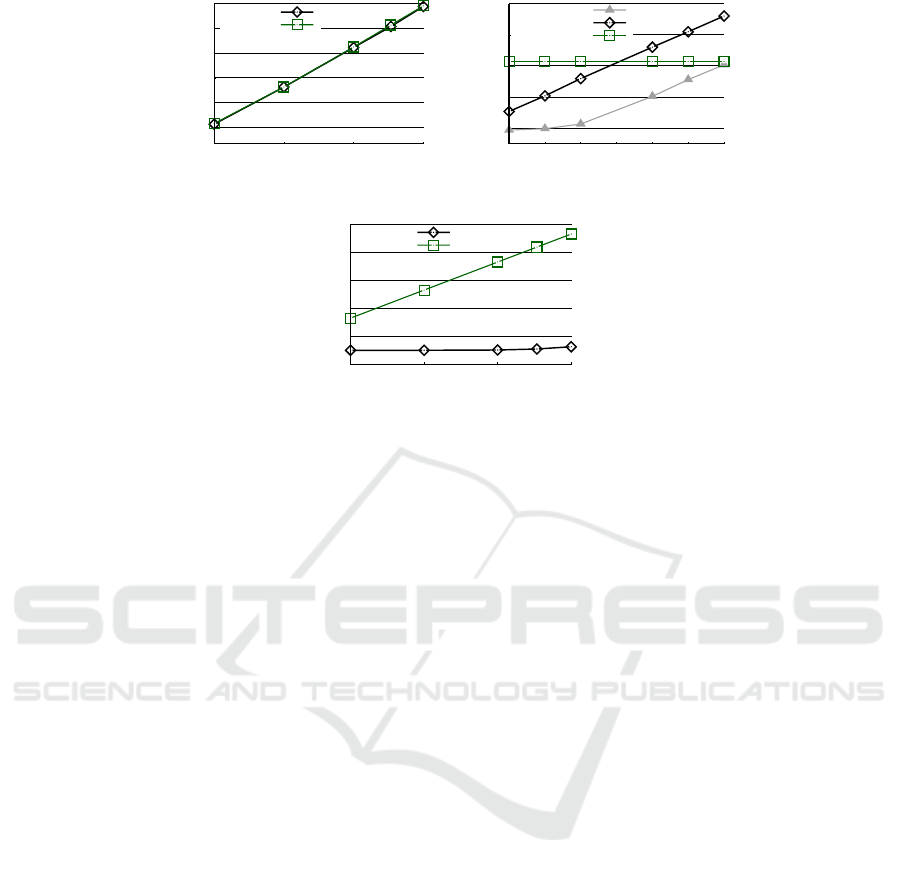
Generator Device Overhead. The overhead for the
generators changes only with the model size (after
excluding the training time to generate the plain up-
dates). Thus, we vary the number of model parame-
ters and report overhead.
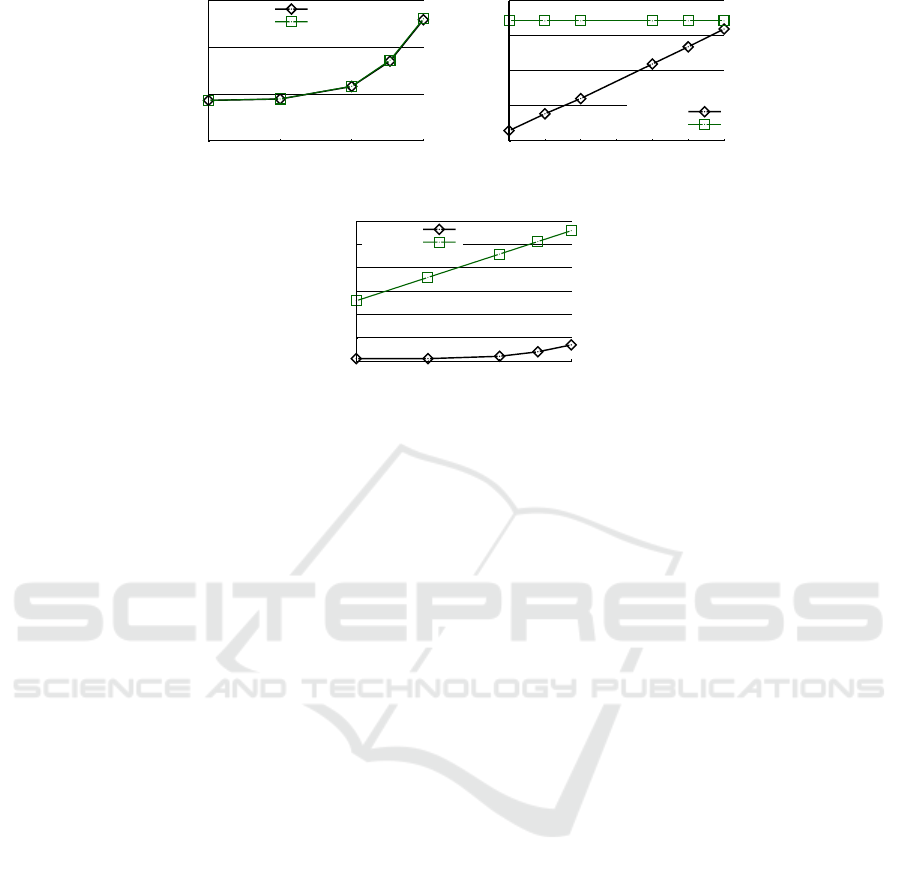
Figure 5a shows the CPU time and Figure 6a shows
the network transfers with a varying number of model
parameters. These overheads grow linearly with the
number of model parameters (the network overhead is
not a straight line as it includes a fixed cost of 60 MiB
to download ZK-proof proving keys). The reason is
that the dominant operations for a generator device
are generating ZK-proofs and shipping ciphertexts to
the aggregator. The number of both operations is pro-
portional to the number of parameters (§4.2).
In terms of absolute overhead, a specific data point
is a million-parameter model, e.g., the CNND model
with 1.2M parameters. For this size, a generator de-
vice spends 1.01 hours in CPU time, or equivalently
13.4 minutes of latency (wall-clock time) over six
cores. The generator also sends 101 MiB of data over
the network. These overheads are moderate, consid-
ering the fact that the probability that a device will be
a generator in a round is small: 10
−5
.
Finally, the CPU and network overhead for Aero
and Orchard is roughly the same. The reason is that
the dominant operations for the two systems are com-
mon: ZK-proofs and upload of ciphertexts.
Verifier Device Overhead. Figure 5b shows CPU and
Figure 6b shows network overhead for the verifier de-
vices that participate in the verifiable aggregation pro-
tocol (§4.3). These experiments fix the number of
model parameters to 1.2M and vary the probability q
with which a verifier device samples summation trees
to inspect (a verifier device in Aero checks q · ℓ sum-
mation trees). For Orchard, overhead does not change
with q (q is 1 as all devices are sampled).
Overall, Aero’s verifier devices, which are the
bulk of the devices in the system, are efficient con-
suming a few milliseconds of CPU and a few KiBs
of network transfers. For instance, for q = 10
−5
,
Aero incurs 3.12 KiB in network and 15 ms in CPU
time, while Orchard takes 1.96 seconds (130×) and
738 MiB (2.36 · 10
5
×).
Comparing Aero with Orchard, a verifier in Aero
consumes lower CPU than Orchard for smaller values
of q but a higher CPU for larger q. This trend is due
to constants: even though an Aero device checks q · ℓ
summation trees and 3s ciphertexts in each tree ver-
sus ℓ · 3s ciphertexts in Orchard, Aero devices ver-
ify the ZK-proofs to address the reuse-of-keys is-
sue, while Orchard does not have such a requirement
(§4.3). Each proof check takes ≈700 ms on a single
CPU of c5.24xlarge. Indeed, Aero w/o ZK-proof
check (another line in the plot) is strictly better than
Orchard.
Aero’s network overhead increases linearly with
q, while Orchard’s stays constant as it does not do
sampling (Figure 6b). Notably, when q = 1, i.e., when
Aero and Orchard check the same number of cipher-
texts, a Aero verifier consumes 251 MB, which is
≈ 1/3rd of Orchard. This is because polynomial iden-
tity testing allows a Aero verifier to download evalu-
ations of ciphertext polynomials rather than full poly-
nomials from non-leaf vertices (§4.3).
Committee Device Overhead. Figure 5c and Fig-
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
386
0.25
1
4
16
64
256
1 10 100 1000
CPU time (min.)
# of params (in multiples of 2
12
)
Aero
Orchard
(a) Generator.
10
-4
10
-2
10
0
10
2
10
4
10
-6
10
-5
10
-4
10
-3
10
-2
10
-1
10
0
CPU time (sec.)
device sampling probability (q)
Aero w/o zkp
Aero
Orchard
(b) Verifier.
10
0
10
1
10
2
10
3
10
4
10
5
1 10 100 1000
CPU time (min.)
# of params (in multiples of 2
12
)
Aero
Orchard
(c) Decryption committee.
Figure 5: CPU time per device per round of training for different device roles in Aero and Orchard.
ure 6c show the CPU and network overhead of de-
cryption committee devices as a function of the model
size. (In Aero, the first decryption committee also
serves as the master committee.)
Aero’s overheads are much lower than
Orchard’s—for 1.2M parameters, CPU time is
206 s in Aero versus 214 hours in Orchard (i.e.,
3751× lower), and network is 234 MiB in Aero
versus 11 TiB in Orchard (i.e., 4.8 · 10
4
× lower).
This improvement is for two reasons. First, Aero
divides the decryption of multiple ciphertexts across
committees, and thus each performs less work.
Second, Aero uses the distributed decryption protocol
(§4.4), while Orchard uses the general-purpose MPC.
7 RELATED WORK
Aero’s goal is to add the rigorous guarantee of dif-
ferential privacy to federated learning—at low device
overhead. This section compares Aero to prior work
with similar goals.
Local Differential Privacy (LDP). In LDP, devices
locally add noise to their updates before submitting
them for aggregation (Truex et al., 2020; Ding et al.,
2021). On the plus side, the privacy guarantee in LDP
does not depend on the behavior of the aggregator, as
devices add noises locally. Further, LDP is scalable
as it adds small device-side overhead relative to plain
federated learning. However, since each device per-
turbs its update, the trained model can have a large
error.
Central Differential Privacy (CDP). Given the ac-
curacy loss in LDP, many systems target CDP. For
example, Oort (Lai et al., 2021) provides CDP but
assumes a trusted aggregator. The core challenge is
hiding sensitive device updates from the aggregator.
Honeycrisp (Roth et al., 2019), Orchard (Roth et al.,
2020), and Mycelium (Roth et al., 2021) target a set-
ting of a billion devices. One of their key insights
is to run expensive cryptographic protocols among a
small, randomly-sampled committee, while leverag-
ing an untrusted resourceful aggregator to help with
the aggregation. Among the three systems, Orchard
supports learning tasks, while Honeycrisp supports
aggregate statistics and Mycelium supports graph an-
alytics. The limitation of Orchard is that it imposes a
large overhead on the devices and Aero improves over
Orchard by several orders of magnitude (§6).
8 SUMMARY AND FUTURE
WORK
Federated learning over a large number of mobile de-
vices is getting significant attention both in industry
and academia. One big challenge of current practical
systems, those that provide good accuracy and effi-
ciency, is the trust they require: devices must trust
that the server will not be compromised. Aero extends
these systems by showing that one can perform FL
with good accuracy, moderate overhead, and the rig-
orous guarantee of differential privacy without trust-
ing a central server. Aero improves the trade-off by
focusing on a specific learning algorithm and tuning
Federated Learning with Differential Privacy and an Untrusted Aggregator
387
32
64
128
256
1 10 100 1000
Network (MiB)
# of params (in multiples of 2
12
)
Aero
Orchard
(a) Generator.
10
-4
10
-2
10
0
10
2
10
4
10
-6
10
-5
10
-4
10
-3
10
-2
10
-1
10
0
Network (MiB)
device sampling probability (q)
Aero
Orchard
(b) Verifier.
10
-1
10
0
10
1
10
2
10
3
10
4
10
5
1 10 100 1000
Network (GiB)
# of params (in multiples of 2
12
)
Aero
Orchard
(c) Decryption committee.
Figure 6: Network transfers per device per round of training for different device roles in Aero and Orchard.
system architecture and design to this algorithm (§4).
The main evaluation highlight is that Aero has com-
parable accuracy to plain federated learning, and im-
proves over prior work Orchard that has strong guar-
antees by five orders of magnitude (§6).
Aero has some limitations. For example, Aero is
designed for synchronized FL that proceeds in rounds
and Aero uses the synchronization assumption for
its privacy guarantee. For example, Aero requires
enough verifier devices to be online during a round
to check the aggregator’s work. Thus Aero doesn’t
support asynchronous federated learning. In addi-
tion, Aero doesn’t support filtering of device updates,
which can improve model accuracy. We leave these
improvements as future work.
ACKNOWLEDGMENTS
Richa Wadaskar helped conduct preliminary exper-
iments for Aero. Natacha Crooks helped write an
earlier draft of Aero. The presentation of this pa-
per was greatly improved by the careful comments of
anonymous reviewers of OSDI, SIGCOMM, NSDI,
and ICISSP. This work is supported in part by a 2021
UCSB Academic Senate Grant, a UCSB Early Career
Faculty Acceleration Award, DARPA under agree-
ment number HR001118C0060, and National Science
Foundation under Grant No. 2126327.
REFERENCES
Abadi, M., Chu, A., Goodfellow, I., McMahan, H. B.,
Mironov, I., Talwar, K., and Zhang, L. (2016). Deep
learning with differential privacy. In ACM Conference
on Computer and Communications Security (CCS).
Chen, H., Dai, W., Kim, M., and Song, Y. (2019). Effi-
cient multi-key homomorphic encryption with packed
ciphertexts with application to oblivious neural net-
work inference. In ACM Conference on Computer and
Communications Security (CCS).
Damg
˚
ard, I., Pastro, V., Smart, N., and Zakarias, S.
(2012). Multiparty computation from somewhat ho-
momorphic encryption. In Advances in Cryptology—
CRYPTO.
Ding, J., Liang, G., Bi, J., and Pan, M. (2021). Differen-
tially private and communication efficient collabora-
tive learning. In Proceedings of the AAAI Conference
on Artificial Intelligence (AAAI).
Dwork, C. (2011). A firm foundation for private data anal-
ysis. Communications of the ACM.
Dwork, C., McSherry, F., Nissim, K., and Smith, A. (2006).
Calibrating noise to sensitivity in private data analysis.
In Theory of Cryptography Conference (TCC).
Dwork, C., Roth, A., et al. (2014). The algorithmic founda-
tions of differential privacy. Foundations and Trends
in Theoretical Computer Science.
Fan, J. and Vercauteren, F. (2012). Somewhat practical fully
homomorphic encryption. IACR Cryptol. ePrint Arch.
Groth, J. (2016). On the size of pairing-based non-
interactive arguments. In Annual International Con-
ference on the Theory and Applications of Crypto-
graphic Techniques (EUROCRYPT).
Gupta, V. and Gopinath, K. (2006). An extended verifiable
secret redistribution protocol for archival systems. In
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
388

International Conference on Availability, Reliability
and Security (ARES).
Hard, A., Rao, K., Mathews, R., Ramaswamy, S., Beaufays,
F., Augenstein, S., Eichner, H., Kiddon, C., and Ram-
age, D. (2018). Federated learning for mobile key-
board prediction. arXiv preprint arXiv:1811.03604.
Lai, F., Dai, Y., Singapuram, S. S., Liu, J., Zhu, X., Mad-
hyastha, H. V., and Chowdhury, M. (2022). FedScale:
Benchmarking model and system performance of fed-
erated learning at scale. In International Conference
on Machine Learning (ICML).
Lai, F., Zhu, X., Madhyastha, H. V., and Chowdhury, M.
(2021). Oort: Efficient federated learning via guided
participant selection. In USENIX Symposium on Op-
erating Systems Design and Implementation (OSDI).
McMahan, B., Moore, E., Ramage, D., Hampson, S., and
y Arcas, B. A. (2017). Communication-efficient learn-
ing of deep networks from decentralized data. In Ar-
tificial intelligence and statistics.
McMahan, H. B., Ramage, D., Talwar, K., and Zhang, L.
(2018). Learning differentially private recurrent lan-
guage models. In International Conference on Learn-
ing Representations.
Melis, L., Song, C., Cristofaro, E. D., and Shmatikov, V.
(2019). Exploiting unintended feature leakage in col-
laborative learning. In IEEE Symposium on Security
and Privacy (S&P).
Reddi, S. J., Charles, Z., Zaheer, M., Garrett, Z., Rush,
K., Kone
ˇ
cn
`
y, J., Kumar, S., and McMahan, H. B.
(2020). Adaptive federated optimization. In Inter-
national Conference on Learning Representations.
Roth, E., Newatia, K., Ma, Y., Zhong, K., Angel, S., and
Haeberlen, A. (2021). Mycelium: Large-scale dis-
tributed graph queries with differential privacy. In
ACM Symposium on Operating Systems Principles
(SOSP).
Roth, E., Noble, D., Falk, B. H., and Haeberlen, A. (2019).
Honeycrisp: Large-scale differentially private aggre-
gation without a trusted core. In ACM Symposium on
Operating Systems Principles (SOSP).
Roth, E., Zhang, H., Haeberlen, A., and Pierce, B. C.
(2020). Orchard: Differentially private analytics at
scale. In USENIX Symposium on Operating Systems
Design and Implementation (OSDI).
Schwartz, J. T. (1980). Fast probabilistic algorithms for ver-
ification of polynomial identities. Journal of the ACM.
Truex, S., Baracaldo, N., Anwar, A., Steinke, T., Ludwig,
H., Zhang, R., and Zhou, Y. (2019). A hybrid ap-
proach to privacy-preserving federated learning. In
ACM Workshop on Artificial Intelligence and Security.
Truex, S., Liu, L., Chow, K.-H., Gursoy, M. E., and Wei,
W. (2020). LDP-Fed: Federated learning with local
differential privacy. In Proceedings of the ACM In-
ternational Workshop on Edge Systems, Analytics and
Networking.
Yousefpour, A., Shilov, I., Sablayrolles, A., Testuggine,
D., Prasad, K., Malek, M., Nguyen, J., Ghosh, S.,
Bharadwaj, A., Zhao, J., Cormode, G., and Mironov,
I. (2021). Opacus: User-friendly differential privacy
library in PyTorch. arXiv preprint arXiv:2109.12298.
Zhu, L., Liu, Z., and Han, S. (2019). Deep leakage from gra-
dients. In Advances in Neural Information Processing
Systems (NeurIPS).
Zippel, R. (1979). Probabilistic algorithms for sparse poly-
nomials. In International Symposium on Symbolic and
Algebraic Manipulation.
Federated Learning with Differential Privacy and an Untrusted Aggregator
389
