
GNNDLD: Graph Neural Network with Directional Label Distribution
Chandramani Chaudhary
1
, Nirmal Kumar Boran
1
, N Sangeeth
2
and Virendra Singh
3
1
National Institute of Technology Calicut, Kozhikode, India
2
National Institute of Technology, Trichy, Tiruchirappalli, India
3
Indian Institute of Technology Bombay, Mumbai, India
Keywords:
Graph Neural Network, Heterophily, Homophily, Oversmoothing, Decoupling.
Abstract:
By leveraging graph structure, Graph Neural Networks (GNN) have emerged as a useful model for graph-based
datasets. While it is widely assumed that GNNs outperform basic neural networks, recent research shows that
for some datasets, neural networks outperform GNNs. Heterophily is one of the primary causes of GNN
performance degradation, and many models have been proposed to handle it. Furthermore, some intrinsic
information in graph structure is often overlooked, such as edge direction. In this work, we propose GNNDLD,
a model which exploits the edge direction and label distribution around a node in varying neighborhoods
(hop-wise). We combine features from all layers to retain both low-pass frequency and high-pass frequency
components of a node because different layers of neural networks provide different types of information. In
addition, to avoid oversmoothing, we decouple the node feature aggregation and transformation operations.
By combining all of these concepts, we present a simple yet very efficient model. Experiments on six standard
real-world datasets show the superiority of GNNDLD over the state-of-the-art models in both homophily and
heterophily.
1 INTRODUCTION
In many domains, including biological, chemical, so-
cial, etc., data can be naturally modeled as graphs
forming cell or gene graphs, molecular structures, so-
cial networks, and so on. Graphs are powerful data
representations, however, they can not be represented
in Euclidean space. Due to this, traditional machine
learning models are unable to model them. Deal-
ing with graph data presents several issues, including
how to represent or use the structural information of a
graph and how to utilize neighborhoods with no order
and no fixed size. Many existing (Zhu et al., 2020;
Grover and Leskovec, 2016; Hu et al., 2021) sta-
tistical models consider ordered and fixed-size input
for graph data, which cannot capture all information
and may include noise by considering order among
nodes. The Graph Neural Network (GNN) (Scarselli
et al., 2009) is the most recent state-of-the-art (SOTA)
model leveraging machine learning methodologies on
graphs to address these problems. In GNNs, the struc-
tural information is incorporated with the graph enti-
ties, such as node features and/or edge features and/or
labels, etc. Similar to CNNs (Yao et al., 2019), GNNs
can recursively gather information from neighboring
nodes in the graph, which includes both spatial and
node features.
Although GNNs have improved numerous tasks,
the majority of GNN-based models consider the graph
as a homophilous graph (homophily). A network with
the homophily property states that similar nodes are
more likely to attach to one other than dissimilar ones.
Since the majority of real-world networks contain a
variety of nodes and edges, such assumptions are un-
realistic. In a citation network, for example, there
are different node types, such as paper, author, area,
and so on, as well as edges between different types of
nodes. These graphs are referred to as heterophilous
networks (heterophily). Due to the extensive and var-
ied information contained in these graphs, the major-
ity of GNN models are unable to comprehend the het-
erophily aspect of the graph. Many models have been
proposed that are spectral-based and design high-pass
filters to handle heterophily (Luan et al., 2022; Poiitis
et al., 2022). Some methods (Veli
ˇ
ckovi
´
c et al., 2018;
Peng et al., 2021) focus on the selection of neighbors
for aggregation function. These methods tend to have
a higher number of parameters than the usual GNN
and hence require more training time. Some methods
(Zhu et al., 2021; Zhong et al., 2022) learn a com-
Chaudhary, C., Boran, N., Sangeeth, N. and Singh, V.
GNNDLD: Graph Neural Network with Directional Label Distribution.
DOI: 10.5220/0012321400003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 165-176
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
165

patibility matrix to consider label-to-label relations.
In our research, we explore the node-to-label infor-
mation for each node concerning each neighborhood
hop/layer, terming it as label distribution. This refers
to the details regarding which labels are assigned to
the neighboring nodes. This can give a more robust
and local view of label distribution around a node
type instead of considering a generalized compatibil-
ity matrix for all labels, which gives global informa-
tion.
For node classification in graphs, some methods
are based on label propagation (LP), which incorpo-
rates label information (Wang and Leskovec, 2020;
Wang and Leskovec, 2021). Typically, LP-based
methods propagate the label information along the
edges and aggregate it at the nodes. In the proposed
work, the distribution of labels is considered for each
node as its feature, unlike in LP. Our work describes
the type of neighborhood around a node, this dis-
tribution aids the proposed model’s ability to deter-
mine whether the graph is more heterophilous or ho-
mophilous.
Some of the existing methods (Fu et al., 2020)
try to improve the embeddings of graphs with metap-
aths. A metapath is an ordered sequence of the net-
work node and edge types that identify a compos-
ite relation between the node types involved. Since
metapath-based models do not consider the rich node
features, they do not perform well on heterophilous
graphs. In the proposed work, we consider the feature
of nodes with directional information. The directional
label distribution considered is with respect to label
distribution around a node, i.e., we use the distribution
of labels among outdegree nodes and indegree nodes
individually. The nodes which share similar types of
directional label distribution tend to be in the same
class.
We propose a novel GNN model where both
homophilous and heterophilous graphs are consid-
ered. To accommodate the properties of both types
of graphs, we design the model to consider aggre-
gated neighborhood features that are typically consid-
ered in the case of homophilous graphs. To improve
upon heterophily issues, we propose to use directional
label distribution features. So, the model not only
uses structural information for generating node fea-
tures from neighbors but also for generating label in-
formation from its neighbors. It has been observed
that as the number of layers (depth) of the model
grows, the node representation degrades (Liu et al.,
2020). There can be two reasons for this: 1) over-
smoothing of node representation- this is more promi-
nent in the case of small graphs, and 2) noise inclu-
sion in node representation- this is more prominent
in large graphs. To overcome oversmoothing, we de-
couple the aggregation and propagation operations of
GNN. Further, to overcome the noise inclusion prob-
lem, we take each individual layer’s features (Skip
Connection (He et al., 2016)). These features are then
combined with initial features to feed them to a fully
connected layer, which is the final layer. As a result of
neighborhood node features and directional label dis-
tribution, our proposed model improves the expressiv-
ity of structural and semantic information in graphs.
In our proposed work, we are considering the feature
of nodes with incoming edge directions in neighbor-
hood message aggregation. If we add outgoing node
features, it may deviate from the performance of the
model. This can be handled by a graph attention net-
work (GAT) (Veli
ˇ
ckovi
´
c et al., 2018), and we would
like to look into this further in our future work by in-
cluding the edge direction of the edge feature vector.
The edge feature, which requires a lot of processing
resources, is not used in this paper.
In summary, this work makes the following major
contributions:
1) We propose a novel GNN for node classifi-
cation that considers both the homophily and het-
erophily properties of graphs.
2) We design the node representation by reflect-
ing the node features, label distribution, and edge di-
rection information. This representation uses differ-
ent powers of the adjacency matrix depending on the
GNN layer.
3) We carry out in-depth experiments to assess the
effectiveness of our proposed approach on three ho-
mophilous graph datasets and six heterophilous graph
datasets for node classification. Experiments show
that our method consistently outperforms other state-
of-the-art models and baselines in the classification of
nodes in most datasets.
2 RELATED WORK
2.1 Traditional Graph Neural Networks
To improve graph-based tasks GNN is becoming
widely attractive due to its ability to learn from end
to end. Defferrad et al. (Defferrard et al., 2016)
proposed the early GNN model, which discussed
how convolutional neural networks can be general-
ized for graph-based data. Kipf et al. (Kipf and
Welling, 2017) further improved and simplified the
GNN model with an approximation, which is now the
typical GNN baseline called the graph convolutional
neural network (GCN). Due to the success of attention
models in other deep learning areas, Velickovic et al.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
166

(Veli
ˇ
ckovi
´
c et al., 2018) proposed a graph attention
network to improve neighborhood aggregation.
2.2 Oversmoothing
Many studies show that oversmoothing occurs in
GCN with numerous layers, which causes the repre-
sentation of nodes in each connected component to
converge to an identical representation. This is a re-
sult of aggregate and transformation processes being
used repeatedly (Yan et al., 2022). Li et al. (Li et al.,
2018) work is the first study regarding oversmooth-
ing in GCN. The propagation process, according to
the authors, is a unique symmetric type of Laplacian
smoothing that results in a comparable representa-
tion for nodes belonging to the same class. Liu et al.
(Liu et al., 2020) analyze the same problem and pro-
pose adaptive, structure-aware node representations.
To prevent oversmoothing in GNNs with fewer lay-
ers, authors have talked about decoupling the propa-
gation and transformation operations. To overcome
oversmoothing several empirical solutions are pro-
posed such as residual connections (Li et al., 2019),
skip links (Xu et al., 2018), edge dropout (Rong
et al., 2020), new normalization strategies (Zhao and
Akoglu, 2019), etc.
2.3 Heterophily
The crucial issue of heterophily for GNNs was first
explored in (Pei et al., 2020). Although MixHop
(Abu-El-Haija et al., 2019) does not specifically ad-
dress the heterophily issue, it does mention the chal-
lenge of learning in heterophilous graphs and suggests
using multi-hop neighborhoods. Luan et al. (Luan
et al., 2021) use different filter channels to each
node’s advantage to adaptively exploit helpful neigh-
bor information. The authors consider the graph as
an undirected graph. Yan et al. (Yan et al., 2022)
suggested a GCN that, under certain circumstances,
adjusts the degree coefficient and signed messages
based on the degree of nodes. These approaches have
numerous common design choices that seem to im-
prove performance in heterophily environments: us-
ing multi-hop neighborhoods, separating neighbor in-
formation from self-information, and integrating in-
formation from several scales of graphs (Lim et al.,
2021).
Ma et al. (Ma et al., 2019) specifically suggest
DisenGCN which decouples node representations in
GNNs and learns different embeddings with respect
to users’ potential intentions. To encode edge fea-
tures more effectively, several efforts have been made.
Graph Laplacian is used to take edge directions into
account (Zhang et al., 2021; He et al., 2022; Geisler
et al., 2023). According to (Gong and Cheng, 2019),
edge features are encoded using a GNN layer with
an attention-based architecture. The edge feature’s
weights are determined by how similar the character-
istics are between its two nodes.
3 PRELIMINARIES
3.1 Problem Formulation
We focus on the problem of semi-supervised node
classification on a graph G = (V, E), where V =
{v
i
|i = 1, 2, ...n} is the set of nodes, and E ⊆ V × V
is the edge set without self-loops. We consider a di-
rected graph where edge (v
i
, v
j
) gives an edge from
node v
i
to v
j
. For the subsequent discussions, we con-
sider A ∈ R
n×n
as the asymmetric adjacency matrix,
where (i j)
th
entry in A, a
i j
= 1 iff (v
i
, v
j
) ∈ E oth-
erwise a
i j
= 0. X ∈ R
n×d
is the node feature matrix
where n is the number of nodes in the graph G and d
is the feature dimension. Y ∈ R
n×|C|
is the node label
matrix and entry in Y for node v
i
is y
i j
= 1 iff v
i
is
labeled as c
j
, otherwise y
i j
= 0, where C is the set of
class labels and c
j
∈ C.
Node classification is a well-studied problem that
is closely related to the graph’s homophily and het-
erophily properties. The following is a formal defini-
tion of node classification.
Definition 1. Node Classification: It is the pro-
cess of learning a probability, Q(Y |G; θ), to identify
the class of each node that does not have a label in a
graph, G = (V, E,
ˆ
Y ), where
ˆ
Y is the partially observed
label distribution and θ is the model parameters.
3.2 Graph Convolution Networks
The Graph Convolution Network is a multi-layer
feedforward neural network that consists of two
main processes to learn a new feature representa-
tion for feature x
i
. First, features are transformed,
and second, transformed features from neighbors
are aggregated. For a typical GCN, the em-
bedding of the (k + 1)
th
layer can be expressed as:
H
(k+1)
= σ(
ˆ
AH
k
W
k
) (1)
where H
0
= X, σ(.) is a non-linear activation; H
k
and W
k
are the k
th
node representation and transfor-
mation trainable parameters respectively.
ˆ
A is the nor-
malized matrix and there are various ways to rep-
resent it, e.g.,
ˆ
A = D
−1
2
AD
−1
2
, or
ˆ
A = D
−1
AD, or
GNNDLD: Graph Neural Network with Directional Label Distribution
167

ˆ
A =
˜
D
−1
2
˜
A
˜
D
−1
2
, where
˜
A = A + I (Adding self-loop).
The neighborhood aggregation term
ˆ
AH
k
in equation
1 provides a node’s representation after it has been re-
fined by aggregating the representations of its neigh-
bors. And the feature transformation is performed by
σ(.), a technique acquired from conventional neural
networks that deal with nonlinear feature transforma-
tion. GCN builds node representations with several
layers by combining both node properties and graph
structure.
3.3 Homophily and Heterophily
In graphs, most of the time nodes are connected when
they share some common characteristics. As a result,
homophily is a fundamental inherent property of a
graph. Homophily is defined by connected nodes that
are similar to one another. It indicates that there is a
strong likelihood that nearby nodes will have the same
label when referring to the node classification prob-
lem. Contrarily, in a graph with heterophily, the adja-
cent node pairs are more different. The homophily
ratio is a statistic that is used to quantify both ho-
mophily and heterophily features, and it is defined as
follows:
Definition 2. Homophily Ratio: Consider a
graph G, the homophily ratio is given as H(G) =
|{(v
i
,v
j
):(v
i
,v
j
)∈E∧y
i
=y
j
}|
|E|
i.e. H(G) is the fraction of
edges which connects same class nodes.
The neighbors of a node are expected to have the
same characteristics and labels if a graph fulfills the
homophily property. The self-features of the node and
the features of its neighbors are combined by common
aggregation functions like summing to strengthen sig-
nal label matching and increase prediction accuracy.
However, in the instance of heterophily, it is thought
that nodes have unique characteristics and labels. Un-
der this scenario, the accumulation will lessen the sig-
nal and enhance the noise in the feature representa-
tions of the nodes, leading to erroneous predictions.
4 METHODOLOGY
4.1 Directional Label Distribution
It may be best to have some characteristics that can
provide the label distribution around a node because
the homophily and heterophily levels in real-world
datasets can vary. This kind of distribution can make
it clear to the nodes whether they are in a homophily
or heterophily graph; that is, the model will learn
whether the node representation should be similar
to other nodes with the same labels (homophily), or
whether it should be based on different types of nodes.
Typically, a compatible matrix is used in heterophily
graph models to learn the relationships between labels
(Zhu et al., 2021; Zhong et al., 2022). The compatible
matrix is |C| × |C| matrix giving the relation between
each pair of classes. This matrix provides a global
view of how a class is distributed in relation to other
classes. In our approach, the local distribution of class
labels with regard to each node is computed.
We add another dimension to label distribution by
taking direction into account. GCN accepts both di-
rected and undirected graph input, and the edge di-
rection contributes crucial details about a graph. In
spite of the existence of edge direction information in
the input, many earlier techniques, such as GCN and
GAT, ignore it. In their methods, they merely consider
directed graphs, such as Wikipedia-based graphs, as
undirected graphs. In this work, we demonstrate how
losing edge directions will result in the loss of signif-
icant information. We present directional label dis-
tribution by generating three directed edge channels.
The direction of edges is used as a type of edge fea-
ture when constructing these channels, as shown:
[
←−
Z
k
−→
Z
k
←−
Z
k
+
−→
Z
k
] (2)
−→
Z
k
= S
k
Y (3)
←−
Z
k
= (S
k
)
T
Y (4)
where Z
k
∈ R
n×|C|
, S
k
∈ 0, 1
n×n
is an indicator func-
tion, where S
k
i j
= 1, if there is a path of maximum
k hops from i to j otherwise S
k
i j
= 0 and S
k
ji
= 1 if
there is a path of maximum k hops from j to i other-
wise S
k
ji
= 0 (also S
k
ii
= 0). Z
1
i
gives the occurrence
of each class in the first order neighborhood of node
i (here 1 indicates the first GNN layer). Take note
that the three channels identify three different types
of neighborhoods: forward (
−→
Z
k
i
), backward (
←−
Z
k
i
), and
undirected(
←−
Z
k
i
+
−→
[Z
k
i
]). In order to obtain the direction
information for each node, we concatenate the node
label distribution from these three different channels.
The original node feature and the resultant directional
label distribution vector are concatenated for further
processing.
4.2 Decoupled GNN
It is observed that the performance of deeper GCN
suffers due to the entanglement of propagation and
transformation operations (Liu et al., 2020; Dong
et al., 2021; Klicpera et al., 2019). It is crucial to
comprehend these two actions separately. GCN is
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
168
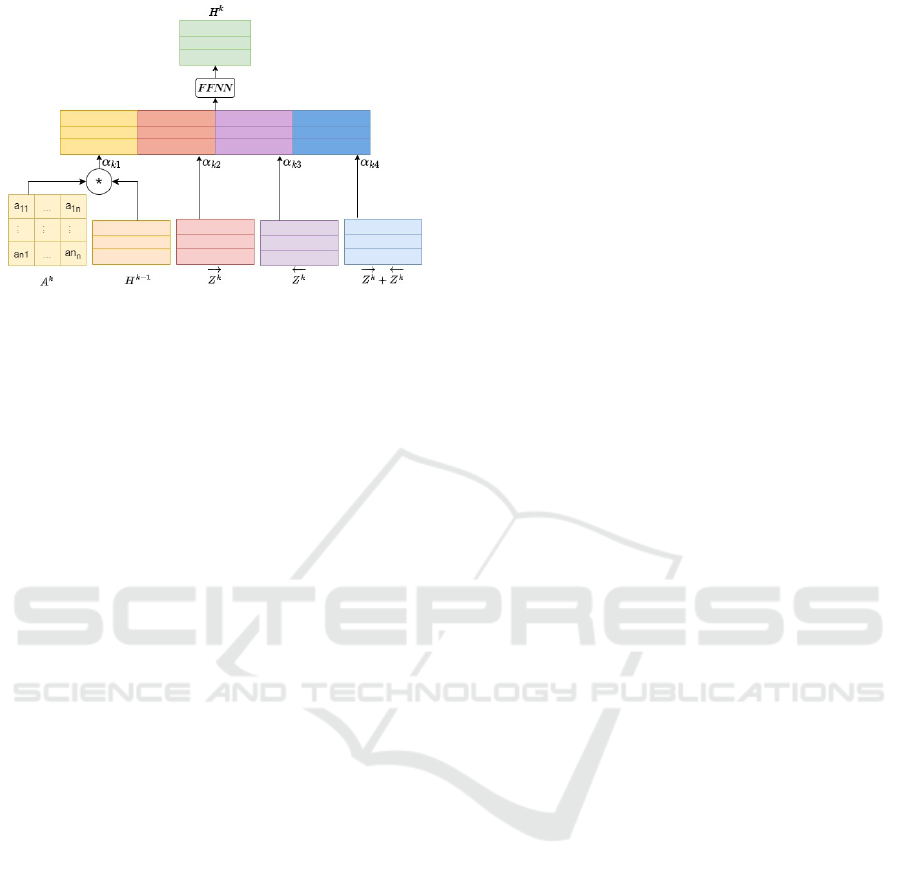
Figure 1: An illustration of k
th
layer embeddings.
important since it is utilized for graphs, and it is as-
sumed that we can exploit the graph structure deeply.
In some cases, if we are unable to use deeper GCN, its
performance will be marginally higher than the Multi-
Layer Perceptron (MLP). This is due to the presence
of rich initial node features in the majority of the
datasets. As a result, even with just the MLP, we can
achieve some decent results. To overcome the issues
arising from deeper GCNs (Liu et al., 2020), we de-
couple the transformation and propagation.
A recent work (Liu et al., 2020) has used decou-
pled GCN and implements the structure as follows:
ˆ
Y = so f tmax(A
′
f
θ
(X)) (5)
where f
θ
(.) is a function that transforms the fea-
tures, for which typically a multilayer perceptron is
used. A
′
is constructed based on graph structure and
propagation strategy. In our work, we adapt the defi-
nition of decoupling as provided by (Liu et al., 2020).
As a result, we use GCN based feature transformation
function, and A
′
is the power adjacency matrix based
on the layer of the model. Our approach decouples
the propagation and transformation operations of typ-
ical GCN by explicitly considering k-hop neighbors
in equation 1 i.e., unlike typical GCN, we multiply
with A
k
instead of A. This scheme of decoupling prop-
agation and transformation helps create deeper mod-
els without significantly affecting performance. This
indicates that the typical drawback of GCN, over-
smoothing, is not observed in a decently deep (40 lay-
ers) GNNDLD model. Though in practice, we usually
do not use a large receptive field, however, in the event
of few training nodes, a broad receptive field is nec-
essary to include more information. There are some
applications such as social network analysis, where
a large receptive field may improve the performance,
but by no means it is sufficient.
The directional label distribution features, along
with the original node features, are helpful in improv-
ing the representation for both graph homophily and
heterophily. The impact of these features is more
prominent in cases of heterophily, as these features
show the distribution of various node labels. In net-
work homophily, the majority of nodes have the same
node type in its surrounding and might have similar
node representation as compared to the heterophilous
network. The embedding of the k
th
layer for the pro-
posed model is illustrated in Figure 1 and is given as
H
k
= FFNN(α
k1
A
k
H
k−1
||α
k2
−→
Z
k
||α
k3
←−
Z
k
||
α
k4
(
←−
Z
k
+
−→
Z
k
))
(6)
where α ∈ R
kX4
, H
0
= X, || denotes column-wise
concatenation, and FFNN is feedforward neural net-
work that uses Relu as an activation function.
We take the hidden state vector from all k-layers
and apply max pooling to each node to increase ex-
pressiveness. We next feed the resulting represen-
tation into a feedforward neural network to find the
probability distribution of the node labels for classifi-
cation.
Q(Y |G;θ) = FFNN(H
0
β
0
||max(H
1
β
1
, H
2
β
2
,
..., H
k
β
k
))
(7)
where α and β are learnable parameters and β ∈
R
k
. α is learned to decide how much importance is to
be given to node features and label distribution for all
three edge direction channels, whereas β is used to de-
cide how much importance should be given to layer-
wise features. We use cross-entropy loss at the output
layer of our model. Initial node features have been
found to be particularly informative in many graph
datasets. As a result, in addition to taking structurally
updated node features into account through propa-
gation and transformation, we consider initial node
features (H
0
) that have rich self-knowledge. We are
aware that each layer of a neural network tends to
provide different information, regardless of whether a
graph is heterophilous or homophilous, and thus they
should be addressed accordingly. In typical GCN, the
last hidden state representation is an amalgamation of
information from all k-layers (hops). Sometimes, in
the process of amalgamating information, some im-
portant information gets diluted and some unneces-
sary information gets enhanced. To overcome this
problem we are using the weighted output of each
layer individually. The weighted layer output is fed
into the FFNN to learn which layer features should be
given more importance. This idea is similar to adding
skip connections from every layer with weights (akin
to a ”skip connection” between layers). We employ
an FFNN for our final classification.
GNNDLD: Graph Neural Network with Directional Label Distribution
169

Intuitions: In equation 6, A
k
gives the number
of walks of length k between vertices. Studying
these walks provides insights into the graph’s struc-
ture, connectivity, and dynamics. It helps understand
node connectivity and accessibility and is crucial for
measuring node centrality and influence in the net-
work. If the vertices have a larger number of walks
between them then their features get multiplied by the
number of walks. Unlike GAT (Veli
ˇ
ckovi
´
c et al.,
2018), which learns the weight explicitly for each
neighbor our approach implicitly takes weight based
on the number of walks between vertices (utilizing
A
k
). Also, A
k
, captures more structural information
than typical GCN as A
k
not only shows the connec-
tion/edge between two vertices but also shows how
strongly the two vertices are connected. Traditional
GCNs average node features with those of their neigh-
boring nodes, which is effective in homophily but
may not be effective in heterophily. The nodes in het-
erophily are expected to be connected to various class
nodes, and their representations are distinct from one
another. Therefore, we continue using the initial fea-
tures while also learning new features from various
graph hops. Each layer gathers data differently; the
earliest layers are more local, while the latter ones
gather an increasing amount of global data (implic-
itly, via propagation).
5 EXPERIMENTS
In this section, we examine various GNN models and
assess the performance of the proposed model, GN-
NDLD. Real-world datasets (Luan et al., 2022; Zhu
et al., 2020) are used for node classification. We be-
gin by detailing the datasets and experimental setups
used in the model. We compare our model to other
state-of-the-art models and then conduct an ablation
study to validate the model’s various components. Fi-
nally, the performance of GNNDLD is evaluated by
changing the number of layers. We report the average
test accuracy with standard deviation.
5.1 Datasets
We conduct extensive experiments on six datasets
commonly used in the GNN literature for node clas-
sification tasks. A brief summary of the datasets is
presented in Table 1. In the table, if the homophily
ratio is close to one, the dataset is more homophilic.
On the other hand, if the ratio is close to zero, the
dataset is heterophilic. Homophily is investigated in
citation network datasets such as Cora, CiteSeer, and
PubMed. In these datasets, papers are represented as
nodes, while citations of one publication by another
are represented by edges. The node label of a paper
indicates its academic subject, and the node features
indicate how papers are represented as a bag of words.
For heterophily, three datasets- Chameleon, Squirrel,
Film are considered. Chameleon and Squirrel contain
Wikipedia pages on similar topics. The Film dataset
is a subgraph of the director-actor-writer-film graph.
5.2 Experimental Setup and Analysis
Our experiments focus on a transductive environment
in which we have access to all the features of nodes
and a subset of their labels. During training, the
weight of each edge is treated as a free variable.
We compare our model with the following ap-
proaches, 1) Classic GNN models: Vanilla GCN
(Kipf and Welling, 2017), GAT (Veli
ˇ
ckovi
´
c et al.,
2018), and GraphSage (Hamilton et al., 2017). 2)
Heterophily focused models: GCNII (Chen et al.,
2020), FSGNN (Maurya et al., 2021), APPNP
(Klicpera et al., 2019), H2GCN (Zhu et al., 2020),
FAGCN (Bo et al., 2021), MixHop (Abu-El-Haija
et al., 2019), and ACM (Luan et al., 2022). 3) Edge
direction focused model: EGNN (Gong and Cheng,
2019) and MagNet (Zhang et al., 2021). 4) Decou-
pled architecture: DAGNN (Liu et al., 2020). We
use the same data splits and training process for all
datasets in order to provide a thorough and fair com-
parison of various models. We use a data split pre-
sented by (Bo et al., 2021), with nodes from each
class accounting for 60%, 20%, and 20% of the to-
tal for training, validation, and testing, respectively.
For our model, the hyperparameter details are given
in Table 2. The searching Hyper-parameters include
learning rate and weight decay for three types of lay-
ers i.e. input layer, hidden layer, and output layer. The
other crucial hyperparameters include epoch, number
of layers, and dropout.
5.2.1 Comparison with Baseline and SOTA
Models
To visualize the performance of our model, we con-
sider real-world datasets with homophily ratios rang-
ing from strong homophily (Cora, CiteSeer, and
PubMed) to strong heterophily (Chameleon, Squirrel,
film). Table 3 gives the accuracy and standard de-
viation of GNNDLD and other models. The results
of GCN are from (Zhu et al., 2020), GAT, Graph-
SAGE, GCNII, APPNP, H2GCN, FAGCN, MixHop,
and ACM are from (Luan et al., 2022), FSGNN is
from (Maurya et al., 2021), EGNN is from (Gong
and Cheng, 2019), and MagNet (Zhang et al., 2021).
We have considered the best performance score of ev-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
170
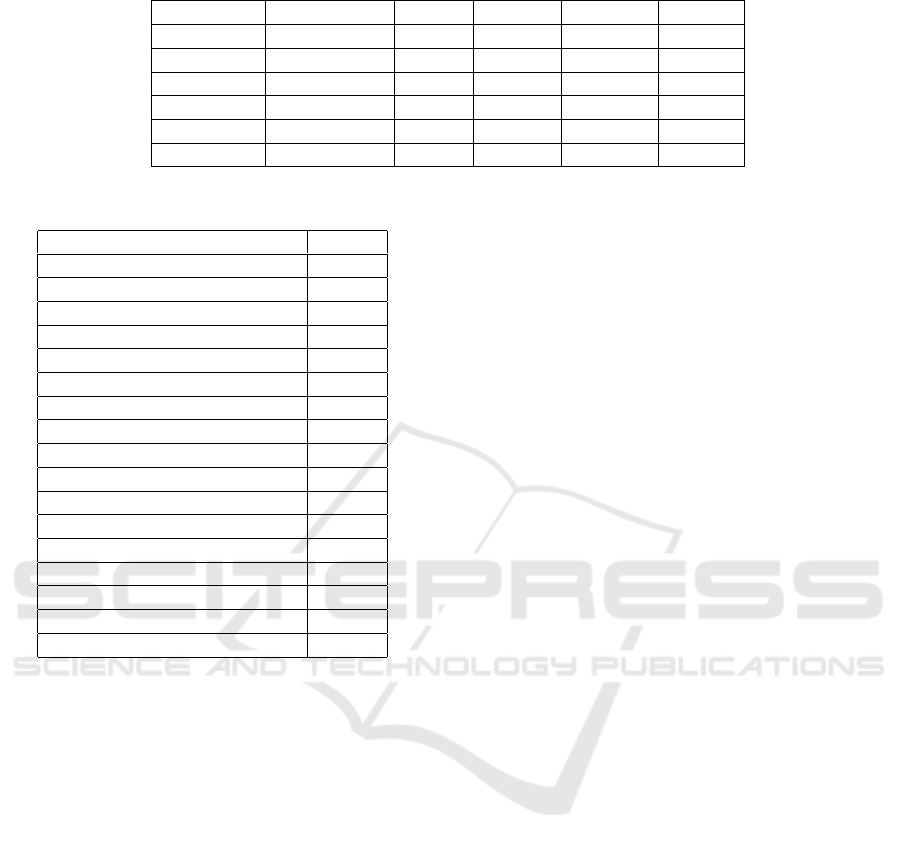
Table 1: Statistics of datasets.
Dataset Hom. Ratio Nodes Edges Features Classes
Cora 0.819 2,708 10,556 1,433 7
CiteSeer 0.703 3,327 9,104 3,703 6
PubMed 0.791 19,717 88,648 500 3
Squirrel 0.22 5,201 198,353 2,089 5
Chameleon 0.23 2,277 36,101 2,325 4
Film 0.22 7,600 33,544 931 5
Table 2: Hyperparameters for GNNDLD.
Hyperparameters Values
weight decay for alpha 0.01
weight decay for beta 0.0001
weight decay for first layer 0.001
weight decay for hidden layers 0.0001
weight decay for final layer 0.0001
learning rate for alpha 0.01
learning rate for beta 0.01
learning rate for first layer 0.01
learning rate for hidden layers 0.01
learning rate for final layer 0.01
hidden units 64
epochs 1500
Optimizer Adam
Activation ReLU
dropout 0.6
Layer-wise normalization Yes
Number of layers 3
ery model. We observe that GNNDLD consistently
outperforms across the entire homophily range, from
low to high. The performance improvement of GN-
NDLD over the baseline method GCN is between
5.71% − 45.43%. In two of the heterophily datasets,
Squirrel and Film, GNNDLD outperforms SOTA by
nearly 7.74% and 33.83%, respectively. The perfor-
mance of all existing models on the Film dataset is
consistently poor, i.e., less than 42%, whereas GN-
NDLD could achieve 75.69%. In edge direction fo-
cused models, both EGNN and MagNet perform less
than our model. The accuracy of MagNet greatly de-
grades in the case of homophilous networks. Further-
more, we evaluate DAGNN, a method based on de-
coupling, and find that its performance on homophily-
based datasets is inferior compared to GNNDLD
GNNDLD performs better than SOTA on both ho-
mophilous and heterophilous graphs. Overall, the re-
sults indicate that the proposed approach can be gen-
eralized without incurring a high computational cost
for node classification tasks in both homophily and
heterophily.
As we cannot include results for all the current
state-of-the-art methods, we referred to Papers With
Code (https://paperswithcode.com/), a free platform
for researchers and professionals to explore the latest
advancements in machine learning research papers,
code implementations, and datasets. The results were
directly obtained from Papers With Code, and our
analysis reveals that our proposed approach outper-
forms all the other methods across various datasets.
Comprehensive results of SOTA approaches are pro-
vided in Appendix A.
5.2.2 Ablation Study
In this section, we consider the effects of various com-
ponents of the proposed model. Table 4 shows the
comparison of the proposed model with other vari-
ants of the model. The first variant, GNNDLD-1,
only considers the initial features of nodes and does
not consider directional label distribution. The second
variant, GNNDLD-2 uses the initial features of nodes
with label distribution without considering edge di-
rection. The third variant, GNNDLD-3, considers the
initial features of nodes with directional label distri-
bution without decoupling. As per our observations
from Table 4, the label distribution adds a lot of in-
formation to node features. The directional label dis-
tribution has more impact on a heterophilous dataset
than on a homophilous one.
GCN suffers from oversmoothing in the case of
heterophily graphs such as chameleon, squirrel, and
film. GNNDLD-1, which models decoupling, is able
to give better results in the case of heterophily when
compared to GCN. In the case of homophily, over-
smoothing works in favor of node label classification,
which is visible from the GCN results. In GNNDLD-
2, the addition of label distribution improves both ho-
mophily and heterophily graphs significantly. The
proposed model, GNNDLD, adds direction informa-
tion to the GNNDLD-2 variant, and it is evident that
there is a slight improvement in homophily graphs
and a significant improvement in heterophily graphs.
In GNNDLD-3, we remove the decoupling mecha-
nism and observe that it performs poorly in cases of
heterophily graphs due to oversmoothing. This indi-
cates that the directional label distribution is resilient
to oversmoothing.
GNNDLD: Graph Neural Network with Directional Label Distribution
171
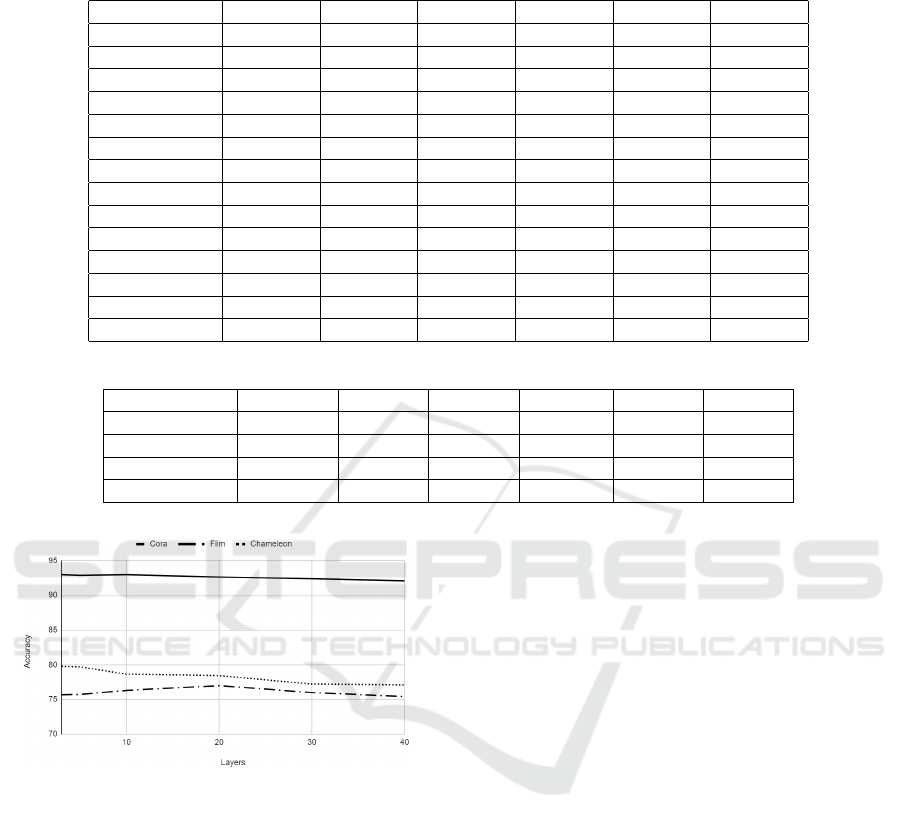
Table 3: Comparison of GNNDLD with baseline and SOTA models: mean test accuracy (%) and standard deviation. The best
results are highlighted in bold format and ”N/A” indicates results not reported in the paper.
Datasets / Models Cora CiteSeer PubMed Chameleon Squirrel Film
GCN 87.28±1.26 76.68±1.64 87.38±0.66 59.82±2.58 36.89±1.34 30.26±0.79
GAT 76.70 ± 0.42 67.20 ± 0.46 83.28 ± 0.12 63.9 ± 0.46 42.72 ± 0.33 35.98 ± 0.23
GraphSAGE 86.58 ± 0.26 78.24 ± 0.30 86.85 ± 0.11 62.15 ± 0.42 41.26 ± 0.26 36.37 ± 0.21
GCNII 88.93 ± 1.37 81.83 ± 1.78 89.98 ± 0.52 62.8 ± 2.87 38.31 ± 1.3 41.54 ± 0.99
FSGNN 87.73±1.36 77.19±1.35 89.73±0.39 78.14±1.25 73.48±2.13 35.67±0.69
APPNP 79.41 ± 0.38 68.59 ± 0.30 85.02 ± 0.09 51.91 ± 0.56 34.77 ± 0.34 38.86 ± 0.24
H2GCN 87.52 ± 0.61 79.97 ± 0.69 87.78 ± 0.28 52.30 ± 0.48 30.39 ± 1.22 38.85 ± 1.17
FAGCN 88.85 ± 1.36 82.37 ± 1.46 89.98 ± 0.54 49.47 ± 2.84 42.24 ± 1.2 31.59 ± 1.37
MixHop 87.61±0.85 76.26±1.33 85.31±0.61 60.50±2.53 43.80±1.48 32.22±2.34
EGNN (best) 88.8 ± 0.3 77.1 ± 0.4 86.7 ± 0.1 N/A N/A N/A
MagNet 79.8±2.5 67.5±1.8 N/A N/A N/A N/A
DAGNN 84.4 ± 0.5 73.3 ± 0.6 80.5 ± 0.5 N/A N/A N/A
ACM (best) 89.75 ± 1.16 82.28 ± 1.12 91.44 ± 0.59 76.08 ± 2.13 69.98 ± 1.53 41.86 ± 1.48
GNNDLD 92.99 ±0.9 86.3±1.24 91.95±0.19 79.78±1.66 77.72±0.84 75.69±0.78
Table 4: Ablation study on different components in GNNDLD. The best results are highlighted in bold format.
Datasets / Models Cora CiteSeer PubMed Chameleon Squirrel Film
GNNDLD-1 84.044 ±1.35 73.6±1.59 88.35±0.43 69.67±2.17 56.66±8.24 32.89±0.67
GNNDLD-2 92.89±1.03 85.68±1.02 92.88±0.29 71.58±2.52 57.75±1.8 73.14±0.85
GNNDLD-3 92.13±1.06 85.38±1.06 91.88±0.28 78.53±1.94 76.29± 1.0 73.71±0.63
GNNDLD 92.99 ±0.9 86.3±1.24 91.95±0.19 79.78±1.66 77.72±0.84 75.69±0.78
Figure 2: Analysis of GNNDLD with an increase in the
number of layers (k) for two types of datasets, 1) Ho-
mophily - Cora 2) Heterophily- Film and Chameleon.
5.2.3 Oversmoothing
To explore the occurrence of oversmoothing, we run
an experiment with varying layers (k) in the model.
GNNDLD is compared for both heterophilous and
homophilous datasets as shown in Figure 2. For
heterophily, we use the Chameleon and Film datasets.
In the case of heterophily, we observe that GNNDLD
has a slightly lower performance from k=3 to k=10,
after which the performance is nearly constant. In
the case of the Film dataset, the performance peaks
at k=20. In the case of homophily, we consider
Cora and the performance is almost constant for
all k values. This analysis shows that the over-
smoothing issue that traditional GCN has is being
addressed by GNNDLD. Due to oversmoothing,
the performance of GCN (Liu et al., 2020) in the
heterophily and homophily based datasets starts to
decline when k is greater than 8 (Rusch et al., 2023).
6 CONCLUSION
We focused on utilizing intrinsic graph information
such as direction and label distribution around a node.
Such information is understudied, and we highlighted
that these simple concepts can boost the performance
of GNN greatly. We demonstrate how our model can
adapt to both homophily and heterophily graphs by
taking into account features from all of the model’s
layers with directional label distribution. Empirically,
this approach shows strong performance across both
heterophily and homophily datasets. In the future,
we would like to add some attention mechanisms that
might further improve the node representation in het-
erophily.
ACKNOWLEDGEMENTS
We are thankful to Indo-Japanese (DST-JST) Joint
Lab Grant on Intelligent CPS for supporting this
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
172

project. This work has also been supported by Na-
tional Security Council Secretariat (NSCS), Govt. of
India.
REFERENCES
Abu-El-Haija, S., Perozzi, B., Kapoor, A., Alipourfard, N.,
Lerman, K., Harutyunyan, H., Steeg, G. V., and Gal-
styan, A. (2019). MixHop: Higher-order graph con-
volutional architectures via sparsified neighborhood
mixing. In Chaudhuri, K. and Salakhutdinov, R., edi-
tors, Proceedings of the 36th International Conference
on Machine Learning, volume 97 of Proceedings of
Machine Learning Research, pages 21–29. PMLR.
Bo, D., Wang, X., Shi, C., and Shen, H. (2021). Be-
yond low-frequency information in graph convolu-
tional networks. In AAAI, pages 3950–3957.
Chen, M., Wei, Z., Huang, Z., Ding, B., and Li, Y. (2020).
Simple and deep graph convolutional networks. In
III, H. D. and Singh, A., editors, Proceedings of the
37th International Conference on Machine Learning,
volume 119 of Proceedings of Machine Learning Re-
search, pages 1725–1735. PMLR.
Defferrard, M., Bresson, X., and Vandergheynst, P. (2016).
Convolutional neural networks on graphs with fast
localized spectral filtering. In Proceedings of the
30th International Conference on Neural Information
Processing Systems, NIPS’16, page 3844–3852, Red
Hook, NY, USA. Curran Associates Inc.
Dong, H., Chen, J., Feng, F., He, X., Bi, S., Ding, Z., and
Cui, P. (2021). On the equivalence of decoupled graph
convolution network and label propagation. In Pro-
ceedings of the Web Conference 2021, WWW ’21,
page 3651–3662, New York, NY, USA. Association
for Computing Machinery.
Fu, X., Zhang, J., Meng, Z., and King, I. (2020). Magnn:
Metapath aggregated graph neural network for hetero-
geneous graph embedding. In Proceedings of The Web
Conference 2020, WWW ’20, page 2331–2341, New
York, NY, USA. Association for Computing Machin-
ery.
Geisler, S., Li, Y., Mankowitz, D., Cemgil, A. T.,
G
¨
unnemann, S., and Paduraru, C. (2023). Transform-
ers meet directed graphs.
Gong, L. and Cheng, Q. (2019). Exploiting edge features
for graph neural networks. In 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 9203–9211.
Grover, A. and Leskovec, J. (2016). Node2vec: Scal-
able feature learning for networks. In Proceedings
of the 22nd ACM SIGKDD International Conference
on Knowledge Discovery and Data Mining, KDD ’16,
page 855–864, New York, NY, USA. Association for
Computing Machinery.
Guo, Y. and Wei, Z. (2023). Graph neural networks with
learnable and optimal polynomial bases.
Hamilton, W. L., Ying, R., and Leskovec, J. (2017). Induc-
tive representation learning on large graphs. In Pro-
ceedings of the 31st International Conference on Neu-
ral Information Processing Systems, NIPS’17, page
1025–1035, Red Hook, NY, USA. Curran Associates
Inc.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
He, Y., Gan, Q., Wipf, D., Reinert, G. D., Yan, J., and Cu-
curingu, M. (2022). GNNRank: Learning global rank-
ings from pairwise comparisons via directed graph
neural networks. In Chaudhuri, K., Jegelka, S., Song,
L., Szepesvari, C., Niu, G., and Sabato, S., editors,
Proceedings of the 39th International Conference on
Machine Learning, volume 162 of Proceedings of Ma-
chine Learning Research, pages 8581–8612. PMLR.
Hu, Y., You, H., Wang, Z., Wang, Z., Zhou, E., and Gao,
Y. (2021). Graph-mlp: Node classification without
message passing in graph.
Kipf, T. N. and Welling, M. (2017). Semi-supervised clas-
sification with graph convolutional networks.
Klicpera, J., Bojchevski, A., and G
¨
unnemann, S. (2019).
Predict then propagate: Graph neural networks meet
personalized pagerank. In 7th International Confer-
ence on Learning Representations, ICLR 2019, New
Orleans, LA, USA, May 6-9, 2019. OpenReview.net.
Li, G., Muller, M., Thabet, A., and Ghanem, B. (2019).
Deepgcns: Can gcns go as deep as cnns? In 2019
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 9266–9275, Los Alamitos, CA,
USA. IEEE Computer Society.
Li, Q., Han, Z., and Wu, X.-M. (2018). Deeper in-
sights into graph convolutional networks for semi-
supervised learning. In Proceedings of the Thirty-
Second AAAI Conference on Artificial Intelligence
and Thirtieth Innovative Applications of Artificial In-
telligence Conference and Eighth AAAI Symposium
on Educational Advances in Artificial Intelligence,
AAAI’18/IAAI’18/EAAI’18. AAAI Press.
Lim, D., Hohne, F., Li, X., Huang, S. L., Gupta, V.,
Bhalerao, O., and Lim, S.-N. (2021). Large scale
learning on non-homophilous graphs: New bench-
marks and strong simple methods.
Liu, M., Gao, H., and Ji, S. (2020). Towards deeper graph
neural networks. In Proceedings of the 26th ACM
SIGKDD International Conference on Knowledge
Discovery& Data Mining, KDD ’20, page 338–348,
New York, NY, USA. Association for Computing Ma-
chinery.
Luan, S., Hua, C., Lu, Q., Zhu, J., Zhao, M., Zhang, S.,
Chang, X., and Precup, D. (2021). Is heterophily A
real nightmare for graph neural networks to do node
classification? CoRR, abs/2109.05641.
Luan, S., Hua, C., Lu, Q., Zhu, J., Zhao, M., Zhang, S.,
Chang, X.-W., and Precup, D. (2022). Revisiting het-
erophily for graph neural networks.
Ma, J., Cui, P., Kuang, K., Wang, X., and Zhu, W.
(2019). Disentangled graph convolutional networks.
In Chaudhuri, K. and Salakhutdinov, R., editors, Pro-
ceedings of the 36th International Conference on Ma-
GNNDLD: Graph Neural Network with Directional Label Distribution
173
chine Learning, volume 97 of Proceedings of Machine
Learning Research, pages 4212–4221. PMLR.
Maurya, S. K., Liu, X., and Murata, T. (2021). Improv-
ing graph neural networks with simple architecture de-
sign.
Pei, H., Wei, B., Chang, K. C.-C., Lei, Y., and Yang, B.
(2020). Geom-gcn: Geometric graph convolutional
networks.
Peng, H., Zhang, R., Dou, Y., Yang, R., Zhang, J., and
Yu, P. S. (2021). Reinforced neighborhood selection
guided multi-relational graph neural networks. ACM
Trans. Inf. Syst., 40(4).
Poiitis, M., Sermpezis, P., and Vakali, A. (2022). Pointspec-
trum: Equivariance meets laplacian filtering for graph
representation learning. In 2022 IEEE/WIC/ACM In-
ternational Joint Conference on Web Intelligence and
Intelligent Agent Technology (WI-IAT), pages 315–
320.
Rong, Y., Huang, W., Xu, T., and Huang, J. (2020). Drope-
dge: Towards deep graph convolutional networks on
node classification.
Rusch, T. K., Bronstein, M. M., and Mishra, S. (2023). A
survey on oversmoothing in graph neural networks.
Scarselli, F., Gori, M., Tsoi, A. C., Hagenbuchner, M.,
and Monfardini, G. (2009). The graph neural net-
work model. IEEE Transactions on Neural Networks,
20(1):61–80.
Veli
ˇ
ckovi
´
c, P., Cucurull, G., Casanova, A., Romero, A., Li
`
o,
P., and Bengio, Y. (2018). Graph attention networks.
Wang, H. and Leskovec, J. (2020). Unifying graph convo-
lutional neural networks and label propagation.
Wang, H. and Leskovec, J. (2021). Combining graph convo-
lutional neural networks and label propagation. ACM
Trans. Inf. Syst., 40(4).
Xu, K., Li, C., Tian, Y., Sonobe, T., Kawarabayashi, K.-
i., and Jegelka, S. (2018). Representation learning on
graphs with jumping knowledge networks. In Dy, J.
and Krause, A., editors, Proceedings of the 35th Inter-
national Conference on Machine Learning, volume 80
of Proceedings of Machine Learning Research, pages
5453–5462. PMLR.
Yan, Y., Hashemi, M., Swersky, K., Yang, Y., and Koutra,
D. (2022). Two sides of the same coin: Heterophily
and oversmoothing in graph convolutional neural net-
works. In 2022 IEEE International Conference on
Data Mining (ICDM), pages 1287–1292, Los Alami-
tos, CA, USA. IEEE Computer Society.
Yao, G., Lei, T., and Zhong, J. (2019). A review
of convolutional-neural-network-based action recog-
nition. Pattern Recognition Letters, 118:14–22. Co-
operative and Social Robots: Understanding Human
Activities and Intentions.
Zhang, X., He, Y., Brugnone, N., Perlmutter, M., and Hirn,
M. (2021). Magnet: A neural network for directed
graphs. In Ranzato, M., Beygelzimer, A., Dauphin,
Y., Liang, P., and Vaughan, J. W., editors, Advances in
Neural Information Processing Systems, volume 34,
pages 27003–27015. Curran Associates, Inc.
Zhao, L. and Akoglu, L. (2019). Pairnorm: Tackling over-
smoothing in gnns. CoRR, abs/1909.12223.
Zhong, Z., Ivanov, S., and Pang, J. (2022). Simplifying
node classification on heterophilous graphs with com-
patible label propagation.
Zhu, J., Rossi, R. A., Rao, A., Mai, T., Lipka, N., Ahmed,
N. K., and Koutra, D. (2021). Graph neural networks
with heterophily.
Zhu, J., Yan, Y., Zhao, L., Heimann, M., Akoglu, L., and
Koutra, D. (2020). Beyond homophily in graph neural
networks: Current limitations and effective designs.
APPENDIX
To conduct a detailed performance comparison
between GNNDLD and existing approaches, we
refer the Papers With Code website and extracted the
state-of-the-art (SOTA) results for all six datasets.
The following graphs are directly sourced from the
website, and the metric used for comparison in all the
graphs is mean test accuracy. Table 5 presents the
best existing approach till date for all the datasets with
their mean test accuracy values. Figure 3 to Figure 8
shows the mean test accuracy graphs for dataset Cora,
CiteSeer, PubMed, Chameleon, Squirrel, and Film,
respectively. In all the graphs x-axis represents the
SOTA approach sorted based on their publishing year
and y-axis represents their mean test accuracy (%).
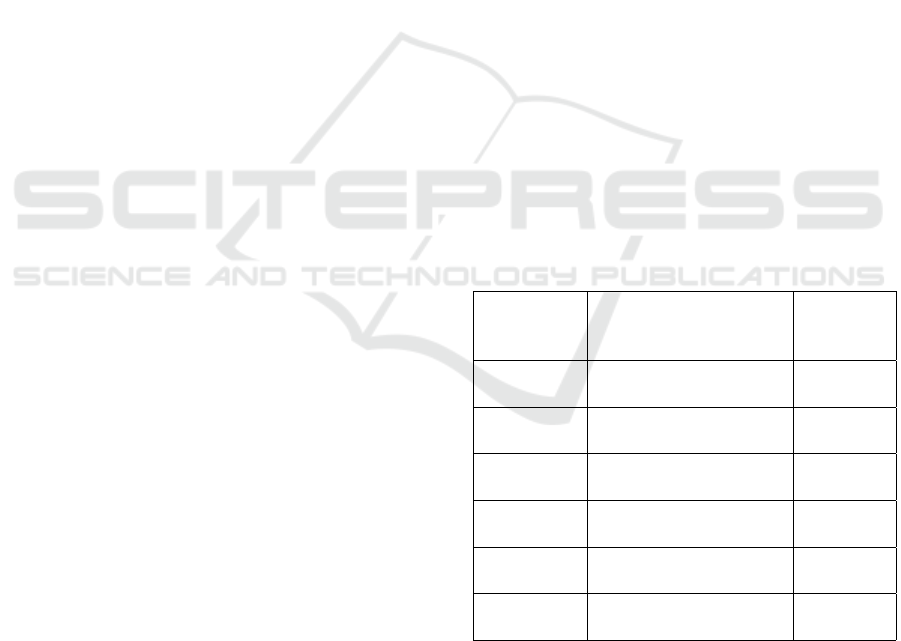
Table 5: Datasets with their best performing approach and
their respective mean test accuracy values.
Dataset SOTA Approach Mean test
accuracy
(%)
Cora ACM-GCN+ (Bo
et al., 2021)
91.17
CiteSeer FAGCN (Bo et al.,
2021)
83.48
PubMed ACM-Snowball-3
(Luan et al., 2022)
91.91
Chameleon ACM-GCN+ (Luan
et al., 2022)
78.21
Sqirrel ACMII-GCN++
(Luan et al., 2022)
71.51
Film FavardGNN (Guo and
Wei, 2023)
43.05
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
174

Figure 3: Comparative Performance of Node Classification Methods on the Cora Dataset.
Figure 4: Comparative Performance of Node Classification Methods on the CiteSeer Dataset.
Figure 5: Comparative Performance of Node Classification Methods on the PubMed Dataset.
GNNDLD: Graph Neural Network with Directional Label Distribution
175
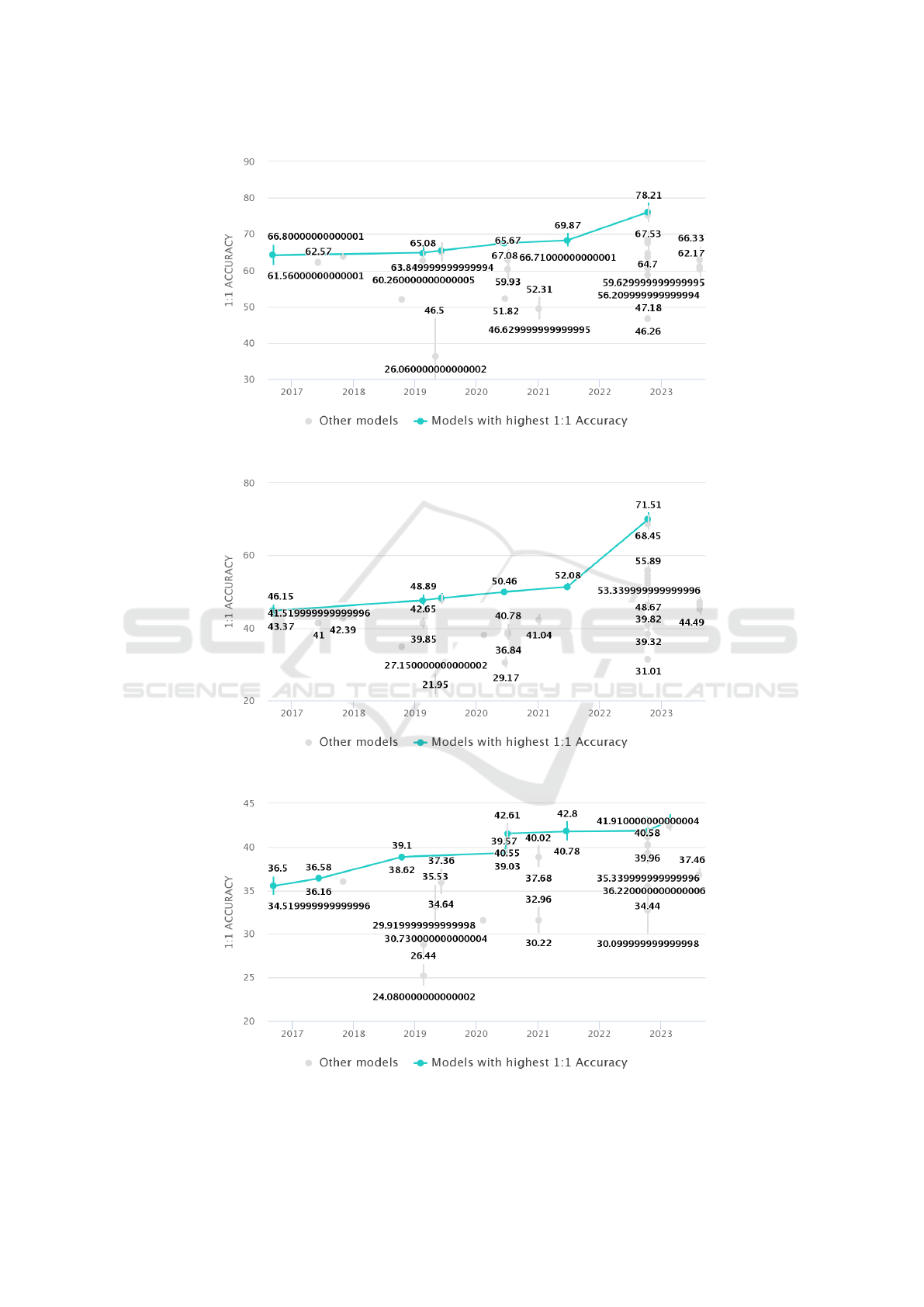
Figure 6: Comparative Performance of Node Classification Methods on the Chameleon Dataset.
Figure 7: Comparative Performance of Node Classification Methods on the Squirrel Dataset.
Figure 8: Comparative Performance of Node Classification Methods on the Film Dataset.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
176
