
Pure Physics-Based Hand Interaction in VR
Mohammed-Bashir Mahdi
1
, Erwan Guillou
1
, Alexandre Meyer
1 a
, Arash Habibi
2
and Sa
¨
ıda Bouakaz
1 b
1
LIRIS, CNRS, Univ. Lyon, Universit
´
e Claude Bernard Lyon 1, 69100 Villeurbanne, France
2
ICube, CNRS, Universit
´
e de Strasbourg, 300 bd S
´
ebastien Brant, 67400 Illkirch, France
Keywords:
Virtual Reality, Interaction, Hooke’s Spring Law, Physics, Physical Interaction, Hands, Natural Interaction,
Visual Feedback.
Abstract:
Interaction in Virtual Reality is still mainly done using controllers. However, since the early 2000s, there has
been a desire to find a way to interact within the virtual environment using only our hands. Pinch motion
detection was introduced to detect a grasping action. Since then, hands’ motion capture has been highly
developed until being directly integrated in VR headsets. Thus, multiple research projects were done in order
to exploit this technology for better grasping techniques. Recent works tend to bring physical hand interaction
to VR. However, they introduce physical heuristics to determine if an object is grasped or not, but in reality,
motion is purely kinematic. In our paper, we introduce a purely physical method based on Hooke’s spring
law that eliminates the need for a grasping mode. Additionally, we incorporate visual feedback methods to
compensate for the absence of the sense of touch. Consequently, with this approach, we can lift objects, throw
them, stack them, and interact with them naturally. We carried out extensive tests with several people who had
no previous experience, to validate our technique.
1 INTRODUCTION
Interacting with virtual environment has always been
a hot topic. For instance, we can observe the evolution
of controllers usage for interacting in video game on
console or computers over the years. However, with
the advent of new technologies like VR headset, this
question arises again. Virtual reality gives a new way
to explore the virtual environment and even to interact
with it. However, most of commercial applications
are made using controllers. This tends to evolve as
new available interaction methodologies emerge.
Indeed, vendors themselves (HTC, Meta), provide
SDK to exploit headset cameras in order to capture
hand movements (HTC, 2023; Meta, 2022). When
hands are captured, it is then possible to play with
virtual object without using any wearable such as
controllers. However, the methods proposed by ven-
dors are purely kinematic, and lay on predefined hand
poses to detect interactions (Buchmann et al., 2004).
Extensive research efforts have been directed
towards achieving physically grounded interactions
within the realm of virtual reality (Kim and Park,
a
https://orcid.org/0000-0002-0249-1048
b
https://orcid.org/0000-0001-7091-7859
2015; H
¨
oll et al., 2018; Liu et al., 2019). However,
none of these approaches are fully physics-based. In-
stead, existing approaches predominantly establish
heuristics for discerning the presence of interactions.
They have two modes of interaction: a physics mode
where an object moves following physical laws and
a grasping mode where a grasped object follows the
hand kinematics. These methods retain the grasping
paradigm established by controller-based approaches,
although with heuristics founded upon physical prin-
ciples for determining whether an object is being held
or not.
Our objective is to introduce a purely physics-
based hand interaction method that avoids any form of
grabbing mechanism altering the mode of interaction.
Additionally, since we do not use additional wearable
such as haptic gloves that provide tactile feedback, we
incorporate visual feedback techniques to enhance the
user’s understanding of the environment.
2 RELATED WORK
This section first introduces the field of hand motion
capture, with the goal of enabling natural interactions
228
Mahdi, M., Guillou, E., Meyer, A., Habibi, A. and Bouakaz, S.
Pure Physics-Based Hand Interaction in VR.
DOI: 10.5220/0012320400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 228-235
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

in virtual reality through hand movements. Subse-
quently, various interaction techniques focusing VR
domain are exposed.
2.1 Hand Capture
In order to capture hand pose data, different sorts of
sensors may be used. We distinguish between ap-
proaches that capture the body and position of the
hand, and those that capture hand movements includ-
ing the fingers.
Complex and expensive solutions such as Opti-
Track (Point, 2023) are capable of tracking and pro-
viding a comprehensive body and hand skeleton but
at the cost of a cumbersome and inconvenient instal-
lation. Inertial measurement unit devices (IMU) can
be used. The output data of these sensors are accel-
erations and angular velocities. IMUs are used for
instance in PIP (Physical Inertial Poser) (Yi et al.,
2022), coupled with a neural network to infer body
joint positions. However, they reconstruct the body
pose without the fingers. In the same category of cap-
ture methodology, LoBSTr (Yang et al., 2021) and
Quest Sim (Winkler et al., 2022) use the headset and
the controllers position to extrapolate the whole body
pose. Quest Sim uses a physics engine alongside a
neural network in order to find the torques needed
to move the different joints. With such an approach,
they have a physical character which allows for phys-
ical interaction. With the increasing popularity of ma-
chine learning, multiple motion capture methods us-
ing only one color camera emerge (Cao et al., 2019;
Zhang et al., 2020; Mehta et al., 2020). For example,
Controller Pose (Ahuja et al., 2022) proposes putting
wide angle cameras on the controllers, looking to-
wards the user in order to capture its movement. As
the method suggests, the user has to hold the con-
trollers, so we are lacking finger pose. Geng (Geng
et al., 2021) make the pipeline lighter as they use only
one RGB camera, as XNect (Mehta et al., 2020).
Still, previous techniques do not provide the hand
skeleton. Sensors such as Leap Motion (ultraleap,
2023) can provide good hand tracking. The device
is equipped with several infrared camera sensors and
LEDs that capture hand and finger movements in real
time. UmeTrack (Han et al., 2022) and MEgATrack
(Han et al., 2020) use multiple RGB cameras in or-
der to focus on capturing hand poses. These meth-
ods make use of the four cameras on the Oculus .
There are solutions using only one usual cameras.
Liu (Liu et al., 2022) use architecture borrowed from
deep learning for that. Indeed, transformer and at-
tention network help to contextualize the articulation
rotations and positions regarding the pose of the arm
and forearm. Google proposes a modern computer
vision framework including real time hand capture
system based on a single color camera called Me-
diapipe (Zhang et al., 2020). The implemented ar-
chitecture is based on Blaze Face (Bazarevsky et al.,
2019), a neural architecture developed for facial mo-
tion capture.
In our use case, the emphasis is on achieving hand
placement with finger motion. We use the body skele-
ton only for precise hand positioning. Machine learn-
ing techniques for hand pose recognition are conve-
nient because they often do not require the use of
complex additional equipment to accomplish the task.
This attribute makes them attractive because they can
be easily deployed in a variety of conditions, includ-
ing in small rooms or at home. Some headsets, such
as the HTV Vive Pro 2 , already feature deep learning-
based hand pose reconstruction, eliminating the need
for additional hardware. For the interaction, our aim
is to perform hand capture without any accessory and
to combine this capture with a completely physical in-
teraction mode, with no need to switch to a kinematic
mode.
2.2 Interaction in VR
In this section, we focus on full virtual interaction us-
ing hands to interact with virtual objects.
One of the most popular ways to interact in VR is
done using controllers such as Oculus Touch and HTV
Vive Pro 2 controllers. Even if the interaction is con-
strained by the controllers, researchers tend to make
it feel more natural by implementing grasping mecha-
nisms (Han et al., 2023; Fern
´
andez et al., 2022; Oprea
et al., 2019) that are at least visually more convincing.
(Oprea et al., 2019) use physics to determine hand and
finger positions when holding an object, depending on
how the user approaches it in the virtual scene. (Han
et al., 2023) use a deep neural network to compute
torques applied on hand joints in order to move the
hand more realistically and grab the targeted object
using only a physical approach. This shows that even
with only controllers, we can subdivide the interac-
tion in two categories: geometry-based and physics-
based interactions.
Another family of approaches relies on the use of
cameras, often integrated into a modern VR headset,
to capture hand movements and determine interac-
tions within a preconfigured set of available actions.
For instance, Hung in Puppeteer (Hung et al., 2022)
use hand motion to control character motion in the
environment of video games. Regarding hand-object
interaction, Buchmann (Buchmann et al., 2004) pro-
pose an early method where they introduced the pinch
Pure Physics-Based Hand Interaction in VR
229
movement to trigger a grasping. We still see its legacy
today, as most of the headset vendors still use this
movement. However, Schafer et al. (Sch
¨
afer et al.,
2022) let the user define its own grasping gesture as
the pinch gesture is neither natural, nor adapted de-
pending on The object the user wants to grab. They
showed that letting the user define its own gesture in-
creases the naturalness feeling of the interaction for
that user.
Finally, pursuing the goal of making interactions
more realistic and natural, many researches are made
towards physics-based hand interactions (H
¨
oll et al.,
2018; Kim and Park, 2015; Kaminski et al., 2022; Liu
et al., 2019). MuJoCo HAPTIX (Kumar and Todorov,
2015) is purely physical, but at the cost of a heavy set-
up: haptic glove for force feedback and hand skele-
ton retrieval, paired with an OptiTrack system to po-
sition a hand in the world. The spring model from
Borst (Borst and Indugula, 2006) is interesting as it
performs physics-based interactions too, but still uses
CyberGloves and works on hand joint torques. We
aim at making the setup simpler with no additional
wearable, and thus adapt the spring model. Regard-
ing the other listed methods, the interaction is physi-
cal as long as the hand is not grasping any object, ob-
ject movement becomes kinematic otherwise, which
makes these techniques hybrid.
(Kim and Park, 2015) in his method selects 1000
vertices from a hand mesh in order to add sphere col-
liders on each one of them. These colliders are used to
detect collisions with the objects in the scene. They
realized that they were unable to have a stable sys-
tem for fast paced movements, thus when grasping is
detected they switch the moving object to kinematic
mode to make it follow hand moves. This principle of
having objects physically interact with the hand and
switching to geometric interaction when grasping is
detected is also found in the paper (Liu et al., 2019).
In (H
¨
oll et al., 2018) physical approach is only used
for the grasping heuristic. It relies on Coulomb fric-
tion model computation, not to move the object, but
to determine if the applied force on the object satis-
fies the friction model. If so, then the object goes
into a grabbed mode. Moreover, here one can see the
hand being teleported as collision detection happens
earlier. This is due to the increase of the object col-
lider size, in order to prevent any physic engine in-
stabilities. There is still ongoing research on making
interaction being fully physical in VR as shown by
the work of Kaminski (Kaminski et al., 2022). Un-
fortunately, they claim being only able to slide ob-
jects around, and grasping is not possible. When in-
teracting in VR, one must use a proper hand repre-
sentation in order to increase the user’s experience
quality, regarding the set goal. Ferran (Argelaguet
et al., 2016) shows that using a simple hand repre-
sentation increases the feeling of embodiment. More-
over, Dewez (Dewez et al., 2023) discussed the in-
terest of using a ghost hand representation when han-
dling objects.
As described, current methods rely on a grasp-
ing mechanism. Indeed, most methods are hybrid,
employing a physics heuristic to determine whether
the object is grasped or not; if it is, they switch to a
kinematic movement. Furthermore, these systems fix
the position of the hand’s fingers and palm, allowing
only the wrist to move. Consequently, this limitation
makes it impossible to perform more complex move-
ments. This emphasizes the idea of having a pure
physical interaction method similar to how interaction
works in real life, in order to have a more natural feel-
ing.
3 PHYSICAL INTERACTION
Our goal is to design a method for purely physical
interaction, enabling the exploration of new move-
ments. To accomplish this, we implement a force
model based on principles of spring physics. We sug-
gest leaving the hand bare, without the need for a
controller or glove to capture it. Our method relies
only on a hand motion capture system. Therefore, we
must define new feedback techniques to address the
absence of tactile feedback, a crucial aspect of real-
life interactions with objects.
3.1 Our Approach
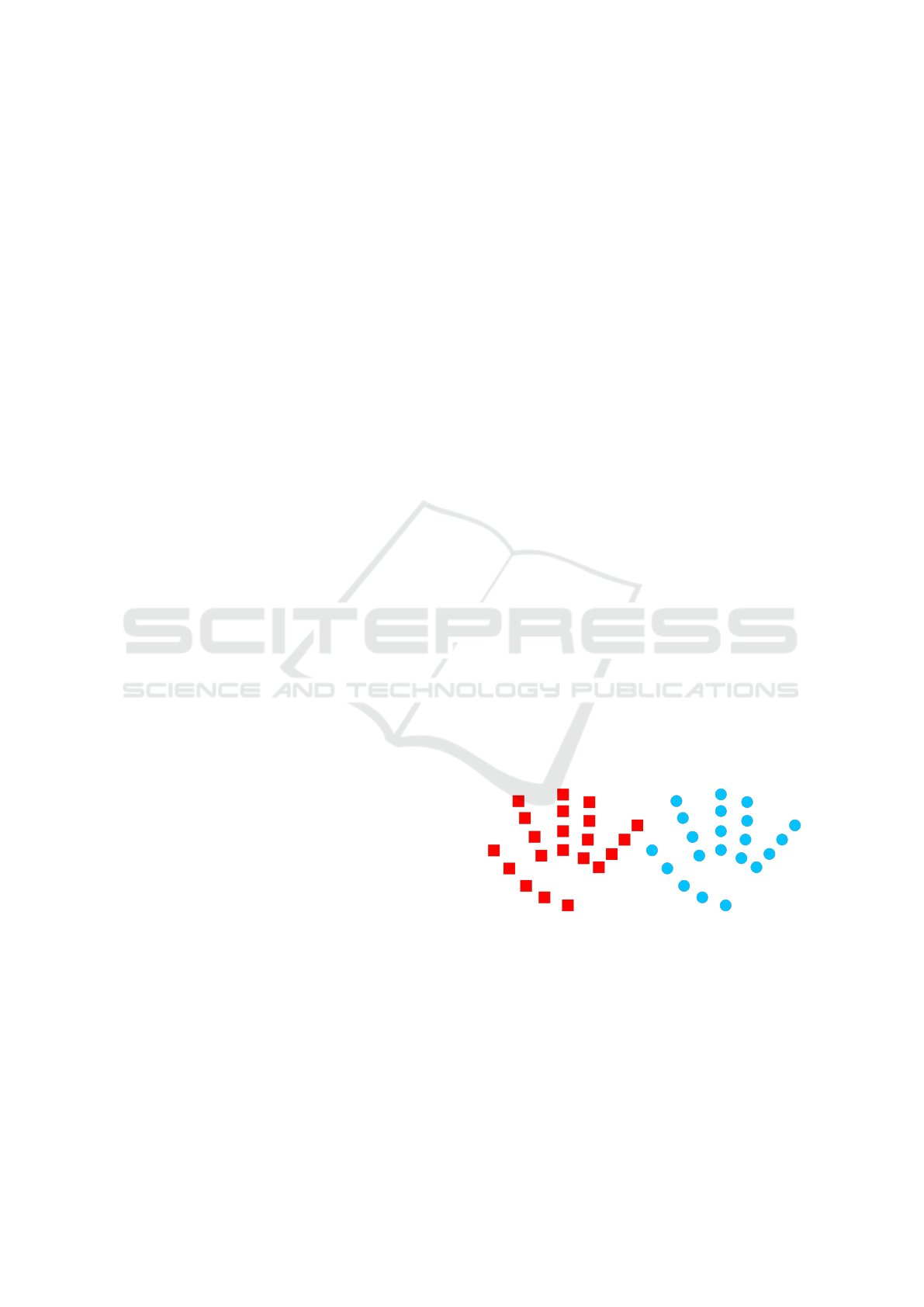
Figure 1: Scheme of both hand representations. The left
one, in red, is the physical hand. The right one, in blue, is
the ghost hand.
The best way to achieve completely natural interac-
tion is to immerse the virtual world in a physical sim-
ulation, including fingers and hands. We base our
approach on a dual representation of the hand: one
physical hand and one ghost hand as shown in Fig-
ure 1. The physical hand interacts physically with the
environment. The ghost hand takes the data received
from the motion capture system, and its joints are po-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
230
sitioned according to the position data received, re-
gardless of the virtual environment. The ghost hand
drives the physical hand. The physical hand can touch
an object, move it, or if the object is too heavy for ex-
ample, the hand is blocked by this object. It can not
pass through objects. On the contrary, the ghost hand
will act like a ghost, meaning that it goes through ob-
jects and has no physical interactions with its environ-
ment.
The key part of the model is how the joints of the
physical hand are moved. The ghost joints will act
like targets for the physical ones. The physical joints
will try to reach their targets, but they are moved using
forces and physics engine, thus they might be blocked
if, for example, they encountered an obstacle on their
way. Our model is related to the Proportional Deriva-
tive controller approach (Yin and Yin, 2020), except
that PD controller provides usually torques whereas
our model applies forces directly on joint positions.
Using spring model for our interaction methods, we
first refer to Hooke’s law (Halliday et al., 2013) which
states that the force of an elastic spring is the product
of its length and a stiffness factor as shown in equa-
tion (1).
F
e
= −k
e
× x (1)
F
e
is the resulting elastic force, k
e
the rigidity constant
(with k
e
> 0) and x the displacement of the spring.
The spring’s rest length is zero.
This first F
e
term aims to attract the joint position
towards the target. In order to complete this spring
model, we add a second term to ensure that the veloc-
ity of the joint targets the velocity of the target joint.
We compute this force acting on the derivative by (2).
F
d
= −k
d
× ∆v (2)
With F
d
the damping force, k
d
the gain of this force
(with k
d
> 0) and ∆v the difference between the speed
and a target speed.
Finally, the total spring force F
s
is the sum of the
two previous forces (3).
F
s
= F
e
+ F
d
(3)
As described earlier, the applied force uses a
spring model. The x value of equation (1) is the dif-
ference between the new ghost joint position and the
physical joint position. It means that the spring seeks
to get a length of zero. ∆v from equation 2 is the dif-
ference between the velocities of both hand represen-
tations. Finally, we add the two previous forces and
end up with the spring force like in (3).
The algorithm 1 shows how we implemented the
model in order to compute the spring force applied
to the physical joints. During each iteration of the
physics engine, this algorithm is performed on each
Data: p
p
, p
g
, k
e
, ∆
t
, k
d
Result: Added force to the physical joint.
d ← p
p
− p
g
;
f
e
← −k
e
× d ;
v
g
← (p
g
− p
prev g
)/∆
t
;
f
d
← −k
d
× (v
p
− v
g
);
rb.AddForce( f
e
+ f
d
);
p
prev g
← p
g
;
Algorithm 1: Computing the force.
hand joint. d is the displacement used to compute the
elastic force f
e
, with p
p
the position of the physical
joint, and p
g
the position of the ghost joint. We com-
pute the speed v
g
of the ghost joint by dividing the
difference between its current position and its previ-
ous position p
prev
g
by the time for one iteration of
the physics engine ∆
t
. After computing the derivative
force (with v
p
the speed of the physical joint, pro-
vided directly by the physics engine in our case), we
sum the two forces to get the total spring force. Then
we add the force to the rigid body rb of the physical
joint in order to make it move.
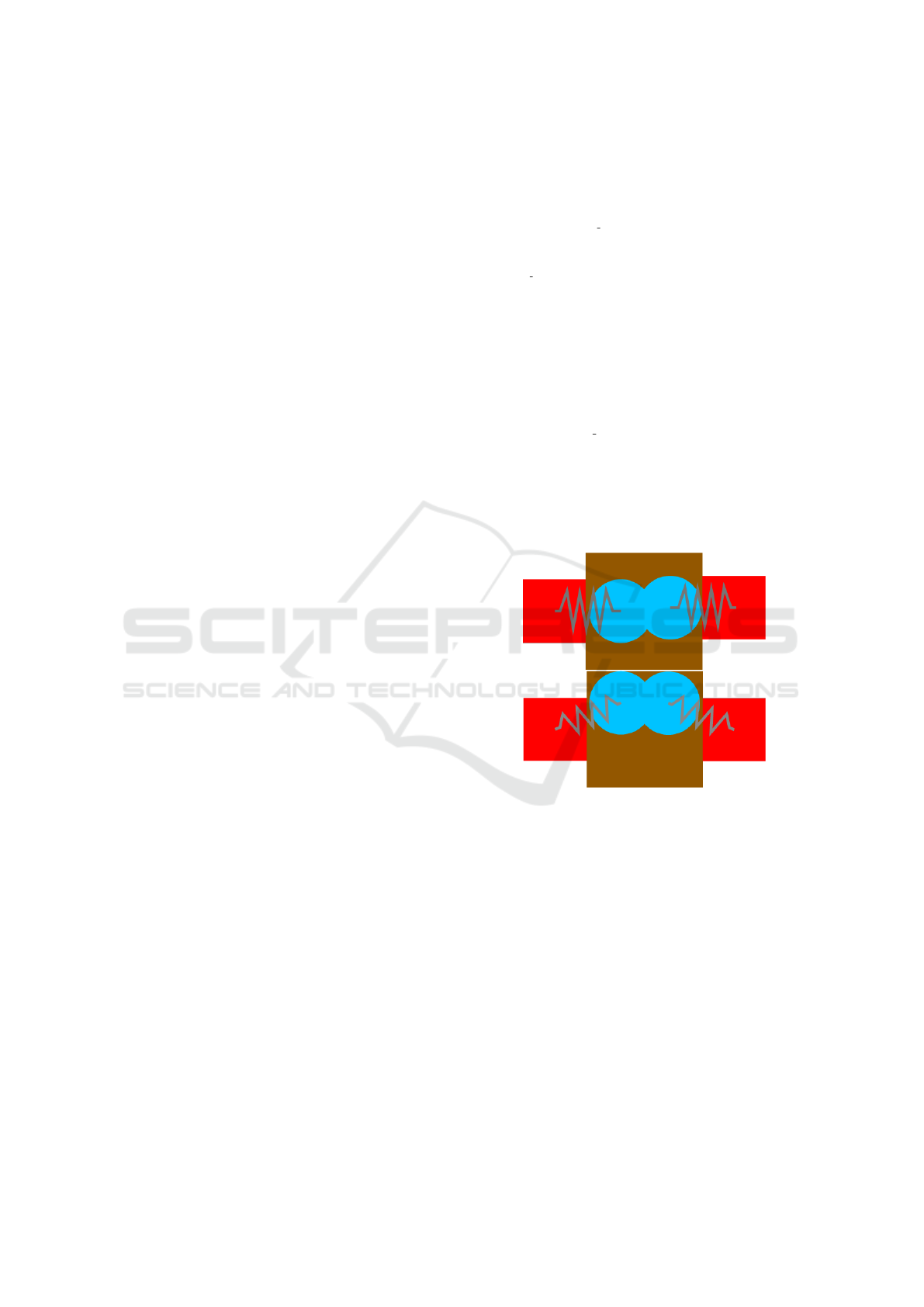
Figure 2: Scheme of how the spring forces (grey spring) are
applied on the physical joint (in red) in order to move an
object (in brown) with the ghost hand (in blue) not being
stopped by the object.
Schemes in Figure 2 show how the forces are ap-
plied. After computing the force for each joint, it is
added to the rigid body of the corresponding joint.
Then, if the force is high enough, it will generate the
required amount of friction between the joints and the
object to make the object not slide from the fingers.
The physics engine will handle the friction calcula-
tion by itself as well as the force transfer between the
joints and the object. Moreover, the force direction
will adapt regarding of the movement. For example,
if the capture joints in the new frame are positioned
higher than the current physical joints, the direction
will be equal to the vector between both kind of joints.
Pure Physics-Based Hand Interaction in VR
231

3.2 Visual Feedback
When we grasp an object in real life, we know we
are in contact with the object because of the sense of
touch. If we rely only on the visual sense, it makes
the task more difficult: we get the data that the fin-
gers behind are touching the object when we see the
cup moving, or at least when waves appear in the cof-
fee. To deal with these problems, one can use a hap-
tic glove like (Kumar and Todorov, 2015) suggested.
However, our goal is to remove wearable as much as
possible (controllers, gloves), thus we believe that it
is possible to help these problems using visual feed-
back only (Prachyabrued and Borst, 2014; Vosinakis
and Koutsabasis, 2018; Ahmed et al., 2021).
We introduced several visual notifications. First of
all, when a joint, from the ghost hand, gets into con-
tact with an object, the corresponding physical joint
color turns into a light blue, and switch back to its
original color when the contact is lost (object falling,
joint no more in contact with the object). At the same
time, when there is contact, the corresponding object
becomes translucent. This emphasizes the informa-
tion of contact, but provides also the possibility to see
through the object and thus be able to know if the hand
joints which were originally occluded by the object
are in contact or not.
As mentioned previously, we use a double repre-
sentation of the hand. We decided to let both of them
visible. By being able to see the ghost hand, it will
help the user to infer the amount of pressure he is
applying with the joint being in contact with the ob-
ject. Indeed, as described in section 3.1, the ghost
joint penetrates the object and the distance between
the ghost joint and the physical joint gives the amount
of force to be applied. Thus, by being able to see both
joints, the user can then see the distance between them
and estimate how much pressure he needs to apply.
Figure 3: Scheme of the visual feedbacks. Left when there
is no contact. Right when there is contact between the hand
and an object. The scheme is reduced to the interaction of
one joint.
The Figure 3 shows the working of the visual feed-
backs. The change of color of the different elements
(physical joint and the object getting transparent), and
the ghost joint being visible to see its level of penetra-
tion in the object.
4 RESULTS
In order to implement our model, we used the Unity
engine and its built-in physics engine PhysicX. The
value k
e
of the elastic force is set to 1000, and the
value k
d
of the derivative force to 20. Those values
have been determined empirically, and fixed to the
most stable values found. The VR headset used is the
HTV Vive Pro 2 and we use its SDK (HTC, 2023) to
perform the hand motion capture. Everything was im-
plemented in a computer equiped with an Intel Xeon
CPU (Xeon E5-1603 at 2.80GHz), a GTX 1080 GPU
with 8GB of VRAM and 16GB of RAM. We decided
to color the joints in red for the left hand and in green
for the right one.
For the testing phase, we designed four different
scenes that require different skills:
• Throw: the user must throw a cube at a pyramid
in order to destroy it.
• Sphere: the user must flick a sphere to make it fly
into a predefined area.
• Displacement: the user must take a cube and place
it into a tilted hole in a wall.
• Stack: the user must make a stack with three
cubes.
To validate our model, twelve subjects tested all
scenes. All of them come from different backgounds.
Most of them had never used VR or just once. If they
did use VR, it was for playing video games, using
controllers, or for watching a movie. All of them
stated that it was their first time interacting in a vir-
tual environment in VR by using only their hands and
without any controller.
To compare users’ performances, we record a
reference time established by an additional experi-
mented person. Table 1 shows the ratio of a novice
subject completion time over the reference user com-
pletion time (to get the actual time of a subject i, sub-
ject ration must be multiplied by the reference com-
pletion time R × Si). One can see that R was beaten
by a small margin three times, in three different exer-
cises: S3 in throw by 1s, S12 in sphere by 0.7s and
S11 in placement by 0.4s. Moreover, 79% of the total
number of experiments were successful, with a 100%
success rate for the sphere scene. Moreover, the aver-
age time differences shows that one requires between
30 and 110 seconds in order to perform a task with-
out previous training. Finally, the median in Table 3
is interesting as it tells that half of the users have been
able to perform each task with in a minute or less, and
with throw and sphere tasks completed in both in less
than 30 seconds.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
232
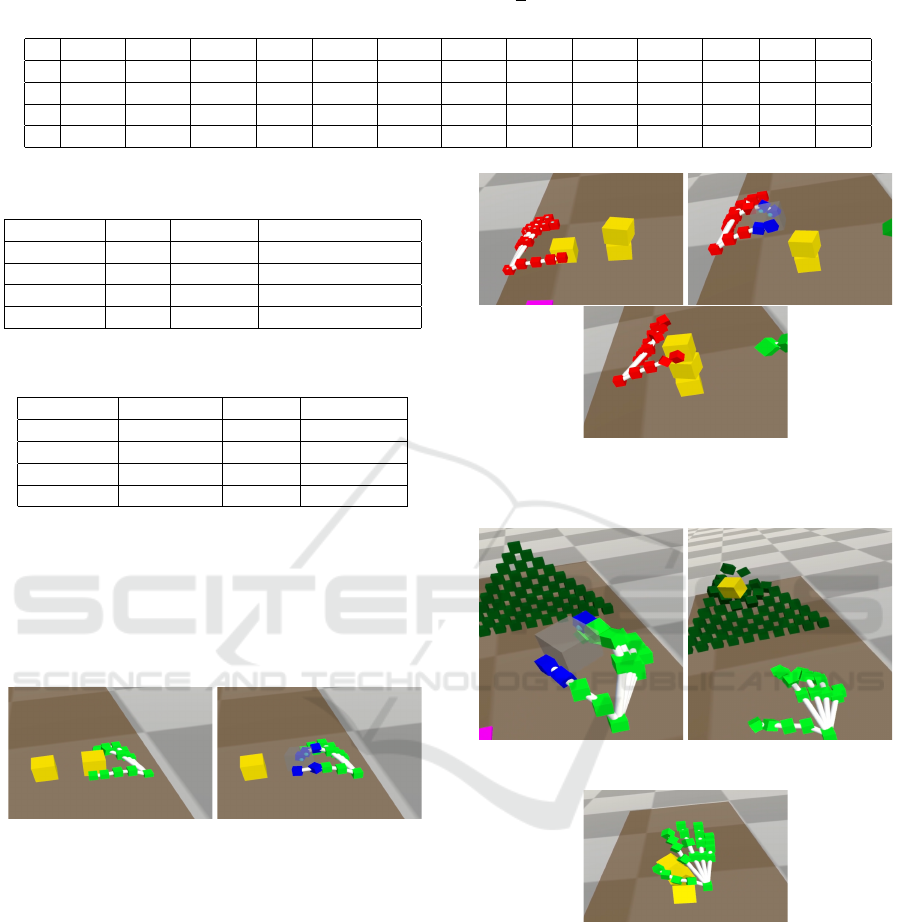
Table 1: Ratio of completion time by each subject over reference time (
S
i
R
). FAIL when the experiment was not completed by
the subject. S
i
for subject i. R is the reference user’s time in second. T: throw, S: Sphere, P: placement, S: Stack.
S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 R
T FAIL 3.84 0.85 5.65 FAIL FAIL FAIL FAIL 27.24 1.14 3.14 5.19 6.8
S 11.15 16.61 19.51 5.23 5.84 3.05 4.44 17.03 10.47 11.23 6.41 0.77 3.2
P 17.50 3.64 8.98 7.97 23.29 1.55 FAIL 8.84 2.84 FAIL 0.96 4.74 8.6
S 2,68 1.14 FAIL 8.27 FAIL 1.42 12.75 FAIL 2.19 6.02 1.84 1.01 28.3
Table 2: Table of the average times, the variance and the
standard deviation, based on the measure of Table 1.
AVG Variance Standard deviation
Throw 45.7 3940.9 62.8
Sphere 29.5 363.0 19.1
Placement 68.8 3859.0 62.1
Stack 110.6 13191.9 114.9
Table 3: Table of the quartiles and median of the measures
from Table 1.
1
st
quartile median 3
rd
quartile
Throw 14.6 26.1 36.8
Sphere 15.9 26.7 39.8
Placement 26.1 54.5 76.6
Stack 40.0 61.9 170.1
Furthermore, the reference time for throw, sphere
and placement are low (resp. 6.8s, 3.2s and 8.6s).
For the stack scene, the times are higher because we
had to cope with the hand motion capture which tends
to freeze. This problem was pointed by every user,
but they still claimed that the interaction itself feels
natural.
Figure 4: Joints and objects changing color when interact-
ing with each others.
Figure 5 shows that it is possible to lift objects
with our method. It is worthy to note that it is possible
to lift an object such as a cube, even though it has no
handle which could prevent the object from sliding.
We see that we are able to cage the object with our
hand to properly lift it. Finally, we can move our hand
around without the cube falling, and put it wherever
we want.
When holding an object, if we move fast enough
and release it, we are able to throw it as it will have
gained enough inertia not to fall right in front of us.
One can throw an object into others as shown in Fig-
ure 6. Thus, we can also adjust the force of the thrown
object by adjusting the speed of our movement, like
in real life, which is only feasible when using a pure
Figure 5: Lifting a cube to make a stack. Top left: preparing
the hand. Top right: grabbing and lifting the cube. Bottom:
opening the hand to let the cube on the stack.
Figure 6: Throwing an object.
Figure 7: Punching a stack of cubes.
physical approach. Moreover, when trying to put the
cube in a tilted hole, the cube will follow the rotation
of the hand naturally in order to be placed correctly.
As we do not have any grasping mode and that
everything is physical, it makes possible to punch ob-
jects and make them fly all over the place as shown
in Figure 7. Since we are not limited to predefined
actions from a controller or any grasping detection
methods, we are free to interact naturally with virtual
environments.
Pure Physics-Based Hand Interaction in VR
233

Figure 4 shows how visual feedback works. The
joints in contact with the cube see their color change,
as well as the object itself get transparent. This point
is also illustrated in Figure 4, 5 and 6.
5 DISCUSSION
Results obtained are promising, nevertheless there are
still areas where different approaches could be tried.
Indeed, the actual state of the projects requires a
learning phase from the user in order to be able to ex-
ploit the full potential of manipulating objects in VR.
As we are lacking haptic feedback, the user must be
trained to manipulate objects without touching any-
thing with his hands. Thus work could be done in the
feedbacks to try to cope with this problem and reduce
the adaptation time.
To improve this model, when a user desires to in-
teract with an object, it might be interesting to make
this object transparent before it gets touched. Mul-
tiple ways can be investigated. As we do not want
to add additional wearable such as gloves, we rely
strongly on visual feedbacks. To maybe improve such
model, it might be interesting to make the object the
user wants to interact with transparent before it gets
touched. For instance, by increasing the touch detec-
tion area of the object, without affecting the physics,
to be able to see through it and thus be able to see the
part of the hand which is behind it.
6 CONCLUSION
We proposed a method that extends the paradigm of
physics-based hand manipulation of objects in VR by
completely eliminating the notion of kinematic state.
Indeed, we eliminate all sorts of grabbing mecha-
nisms which switch the interaction from physics to
kinematic. In addition, our pipeline allows to avoid
all additional accessories such as haptic gloves. To
compensate for the absence of haptic feedback, we
introduced visual feedback to help the user deduce
the missing tactile information. Finally, the results
showed that it is possible to grab objects and even
push them as we would do in real life. The object-
throwing scene would not be possible with a kine-
matic approach. The user would have to use the but-
ton to indicate a release, but the interaction would
then be different from what we do in real life. A
hybrid approach would require the application to re-
ally detect the release at the right moment, at the
risk of having an unrealistic trajectory. Moreover, in
the scene where the cube has to be placed in a hole
in a sloping wall, the kinematic approach would re-
quire an uncomfortable turn of the wrist and would
surely be less easy than with our physical approach
where the cube is oriented against the surface thanks
to physics.
Our test scenes show that a purely physical ap-
proach is feasible, and that novice users are able to
perform tasks quite quickly, which would not be so
obvious with kinematic or even hybrid interaction.
Nevertheless, the model could be improved. The
learning curve in order to adapt to this interaction sys-
tem is steep, mainly because hand motion capture is
sometimes not stable. There might still be some fine-
tuning to improve grasping. Also, the proposed visual
feedback needs to be explored further, or even dig into
another kind of feedbacks such as audio.
For future work, it can be interesting to focus on
feedback development by exploring the use of sounds.
The program could emit a sound when we approach
an object, similar to the way modern cars have park-
ing sensors. However, in scenes with multiple closely
located objects, reaching for one of them could result
in numerous sounds playing simultaneously. Alterna-
tively, sound could be emitted only when a hand joint
comes into contact with an object. What is interesting
here, is that we can make the audio feedback methods
work alongside the visual feedback methods. More-
over, using audio feedback does not need any addi-
tional wearable as VR headset tend to have earphones,
and if not, any headset might do the job as well as the
computers built-in speakers.
REFERENCES
Ahmed, N., Lataifeh, M., and Junejo, I. (2021). Visual
pseudo haptics for a dynamic squeeze / grab gesture
in immersive virtual reality. In 2021 IEEE 2nd In-
ternational Conference on Human-Machine Systems
(ICHMS), pages 1–4.
Ahuja, K., Shen, V., Fang, C. M., Riopelle, N., Kong, A.,
and Harrison, C. (2022). Controllerpose: Inside-out
body capture with vr controller cameras. In Proceed-
ings of the 2022 CHI Conference on Human Factors
in Computing Systems, CHI ’22, New York, NY, USA.
Association for Computing Machinery.
Argelaguet, F., Hoyet, L., Trico, M., and L
´
ecuyer, A.
(2016). The role of interaction in virtual embodiment:
Effects of the virtual hand representation. IEEE Vir-
tual Reality.
Bazarevsky, V., Kartynnik, Y., Vakunov, A., Raveendran,
K., and Grundmann, M. (2019). Blazeface: Sub-
millisecond neural face detection on mobile gpus.
ArXiv, abs/1907.05047.
Borst, C. W. and Indugula, A. P. (2006). A spring model for
whole-hand virtual grasping. Presence: Teleoperators
& Virtual Environments, 15:47–61.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
234

Buchmann, V., Violich, S., Billinghurst, M., and Cockburn,
A. (2004). Fingartips: gesture based direct manipula-
tion in augmented reality. In Conference on Computer
Graphics and Interactive Techniques in Australasia
and Southeast Asia.
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Dewez, D., Hoyet, L., L
´
ecuyer, A., and Argelaguet, F.
(2023). Do you need another hand? investigating dual
body representations during anisomorphic 3d manipu-
lation. IEEE Transactions on Visualization and Com-
puter Graphics.
Fern
´
andez, U. J., Elizondo, S., Iriarte, N., Morales, R.,
Ortiz, A., Marichal, S., Ardaiz, O., and Marzo, A.
(2022). A multi-object grasp technique for placement
of objects in virtual reality. Applied Sciences, 12(9).
Geng, Z., Sun, K., Xiao, B., Zhang, Z., and Wang, J.
(2021). Bottom-up human pose estimation via dis-
entangled keypoint regression. 2021 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 14671–14681.
Halliday, D., Resnick, R., and Walker, J. (2013). Funda-
mentals of physics. John Wiley & Sons.
Han, D., Lee, R., Kim, K., and Kang, H. (2023). Vr-
handnet: A visually and physically plausible hand ma-
nipulation system in virtual reality. IEEE Transactions
on Visualization and Computer Graphics, pages 1–12.
Han, S., Liu, B., Cabezas, R., Twigg, C. D., Zhang, P.,
Petkau, J., Yu, T.-H., Tai, C.-J., Akbay, M., Wang,
Z., Nitzan, A., Dong, G., Ye, Y., Tao, L., Wan, C., and
Wang, R. (2020). Megatrack: Monochrome egocen-
tric articulated hand-tracking for virtual reality. ACM
Trans. Graph., 39(4).
Han, S., Wu, P.-C., Zhang, Y., Liu, B., Zhang, L., Wang,
Z., Si, W., Zhang, P., Cai, Y., Hodan, T., Cabezas, R.,
Tran, L., Akbay, M., Yu, T.-H., Keskin, C., and Wang,
R. (2022). Umetrack: Unified multi-view end-to-end
hand tracking for vr. In SIGGRAPH Asia 2022 Con-
ference Papers, SA ’22, New York, NY, USA. Asso-
ciation for Computing Machinery.
H
¨
oll, M., Oberweger, M., Arth, C., and Lepetit, V. (2018).
Efficient physics-based implementation for realistic
hand-object interaction in virtual reality. In Proc. of
Conference on Virtual Reality and 3D User Interfaces.
HTC (2023). Vive hand tracking sdk. Accessed: 2023-10-
03.
Hung, C.-W., Chang, R.-C., Chen, H.-S., Liang, C. H.,
Chan, L., and Chen, B.-Y. (2022). Puppeteer: Explor-
ing intuitive hand gestures and upper-body postures
for manipulating human avatar actions. In Proceed-
ings of the 28th ACM Symposium on Virtual Reality
Software and Technology, VRST ’22, New York, NY,
USA. Association for Computing Machinery.
Kaminski, E., Kepplier, S., and Israel, J. H. (2022). Physics-
based hand-object-interaction for immersive environ-
ments. Mensch und Computer.
Kim, J.-S. and Park, J. M. (2015). Physics-based hand
interaction with virtual objects. 2015 IEEE Inter-
national Conference on Robotics and Automation
(ICRA), pages 3814–3819.
Kumar, V. and Todorov, E. (2015). Mujoco haptix: A virtual
reality system for hand manipulation. 2015 IEEE-RAS
15th International Conference on Humanoid Robots
(Humanoids), pages 657–663.
Liu, H., Zhang, Z., Xie, X., Zhu, Y., Liu, Y., Wan, Y.,
and Zhu, S.-C. (2019). Physics-based hand-object-
interaction for immersive environments. IEEE In-
ternational Conference on Robotics and Automation
(ICRA).
Liu, S., Wu, W.-X., Wu, J., and Lin, Y. (2022). Spatial-
temporal parallel transformer for arm-hand dynamic
estimation. 2022 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
24091–24100.
Mehta, D., Sotnychenko, O., Mueller, F., Xu, W., Elgharib,
M. A., Fua, P., Seidel, H.-P., Rhodin, H., Pons-Moll,
G., and Theobalt, C. (2020). Xnect: Real-time multi-
person 3d motion capture with a single rgb camera. In
International Conference on Computer Graphics and
Interactive Techniques.
Meta (2022). Interaction sdk overview. Accessed: 2023-
10-03.
Oprea, S., Martinez-Gonzalez, P., Garcia-Garcia, A.,
Castro-Vargas, J. A., Orts-Escolano, S., and Garcia-
Rodriguez, J. (2019). A visually realistic grasping sys-
tem for object manipulation and interaction in virtual
reality environments. Comput. Graph., 83(C):77–86.
Point, N. (2023). Optitrack. Accessed: 2023-10-03.
Prachyabrued, M. and Borst, C. W. (2014). Visual feedback
for virtual grasping. 2014 IEEE Symposium on 3D
User Interfaces (3DUI), pages 19–26.
Sch
¨
afer, A., Reis, G., and Stricker, D. (2022). The gesture
authoring space: Authoring customised hand gestures
for grasping virtual objects in immersive virtual envi-
ronments. Mensch und Computer, pages 1–12.
ultraleap (2023). ultraleap.com. Accessed: 2023-07-23.
Vosinakis, S. and Koutsabasis, P. (2018). Evaluation of
visual feedback techniques for virtual grasping with
bare hands using leap motion and oculus rift. Virtual
Reality, 22:47–62.
Winkler, A., Won, J., and Ye, Y. (2022). Questsim: Human
motion tracking from sparse sensors with simulated
avatars. In SIGGRAPH Asia 2022 Conference Papers,
SA ’22, New York, NY, USA. Association for Com-
puting Machinery.
Yang, D., Kim, D., and Lee, S.-H. (2021). Lobstr: Real-
time lower-body pose prediction from sparse upper-
body tracking signals. Computer Graphics Forum, 40.
Yi, X., Zhou, Y., Habermann, M., Shimada, S., Golyanik,
V., Theobalt, C., and Xu, F. (2022). Physical inertial
poser (pip): Physics-aware real-time human motion
tracking from sparse inertial sensors. In IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Yin, Z. and Yin, K. (2020). Linear time stable pd con-
trollers for physics-based character animation. Com-
puter Graphics Forum, 39(8):191–200.
Zhang, F., Bazarevsky, V., Vakunov, A., Tkachenka, A.,
Sung, G., Chang, C.-L., and Grundmann, M. (2020).
Mediapipe hands: On-device real-time hand tracking.
ArXiv, abs/2006.10214.
Pure Physics-Based Hand Interaction in VR
235
